JP2018048955A - Positional information acquisition device, positioning auxiliary system, positional information acquisition method, and program - Google Patents
Positional information acquisition device, positioning auxiliary system, positional information acquisition method, and program Download PDFInfo
- Publication number
- JP2018048955A JP2018048955A JP2016185560A JP2016185560A JP2018048955A JP 2018048955 A JP2018048955 A JP 2018048955A JP 2016185560 A JP2016185560 A JP 2016185560A JP 2016185560 A JP2016185560 A JP 2016185560A JP 2018048955 A JP2018048955 A JP 2018048955A
- Authority
- JP
- Japan
- Prior art keywords
- transmitter
- position information
- information acquisition
- acquisition device
- positioning
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





Abstract
Description
本発明は、位置情報取得装置、測位補助システム、位置情報取得方法及びプログラムに関する。 The present invention relates to a position information acquisition device, a positioning assistance system, a position information acquisition method, and a program.
従来、一定間隔あるいは必要に応じてGPS(Global Positioning System)から位置情報を取得し、経路をトラッキングする装置が知られているが、必ずしも必要なタイミングでGPSから位置情報を取得できるとは限らない。このため、GPSから取得できなかった位置情報を補完する方法として、加速度センサやジャイロセンサ等を用いた自律航法(Dead Reckoning)によって逐次位置同定を行う方法が知られている。
しかし、長時間(長距離)の自律航法による位置同定は高い精度を保つことが難しく、GPSから長時間安定した位置情報を取得できない状態が続くと、実際の位置・経路などとの乖離が大きくなるという問題がある。
Conventionally, a device that acquires position information from a GPS (Global Positioning System) and tracks a route at regular intervals or as necessary is known. However, position information cannot always be acquired from the GPS at a necessary timing. . For this reason, as a method of complementing position information that could not be acquired from GPS, a method of performing sequential position identification by autonomous navigation (Dead Reckoning) using an acceleration sensor, a gyro sensor, or the like is known.
However, position identification by long-term (long-distance) autonomous navigation is difficult to maintain high accuracy, and if a long-term stable position information cannot be acquired from GPS, there will be a large discrepancy with the actual position / route, etc. There is a problem of becoming.
そこで、上記の問題を解消する方法として、自身の情報を示すポストデータを発信する複数の無線ICタグの機能を有する位置ポストをGPSの電波が届きにくい場所に配置して、位置ポストのポストデータを受信した端末位置が当該ポストデータをサーバに通知することにより、GPS機能により位置データを得られない場合でも、サーバが、ポストデータに基づいて当該端末装置の位置を検出する方法が提案されている(例えば、特許文献1参照)。 Therefore, as a method of solving the above problem, a position post having a function of a plurality of wireless IC tags that transmit post data indicating its own information is arranged in a place where GPS radio waves are difficult to reach, and the position post post data A method is proposed in which the server detects the position of the terminal device based on the post data even if the position data cannot be obtained by the GPS function by notifying the server of the post data. (For example, refer to Patent Document 1).
しかしながら、上記特許文献1に開示されている方法は、携帯電話網やそれ相当の通信手段を介してインターネット上のサーバに常時接続できることが要求される。また、携帯電話網やそれ相当の通信手段を有する通信端末は、携帯電話やスマートフォン等の携帯機器に限られ、安価な電子機器(例えば、経路トラッカー等)に採用され難いという問題がある。また、山中をカバーする携帯電話網などのインフラを整備することは現実的には難しく、使う場所がインフラの整った場所に限られてしまうという問題がある。また、GPSの電波受信によるバッテリー消費量も比較的大きなものであるため、GPS電波の受信状況にかかわらず常時(あるいは間欠的に)電波受信を行うことでバッテリー消費量が増大するという問題もある。
However, the method disclosed in
本発明は、このような問題に鑑みてなされたものであり、大掛かりなインフラを整備することなく、容易に正確な位置情報を取得するとともに、当該位置情報を取得する際の消費電力を抑制することができる位置情報取得装置、測位補助システム、位置情報取得方法及びプログラムを提供することを目的とする。 The present invention has been made in view of such a problem, and easily obtains accurate position information without developing a large-scale infrastructure, and suppresses power consumption when obtaining the position information. It is an object of the present invention to provide a position information acquisition device, a positioning assistance system, a position information acquisition method, and a program that can be used.
上記課題を解決するため、本発明は、
位置情報取得装置であって、
前記位置情報取得装置の位置を測位可能な測位部と、
予め設置されている少なくとも一つの発信機から発信される信号を受信可能な通信部と、
前記通信部が前記発信機から前記信号を受信しているとき前記測位部の動作を停止させる制御部と、
を備えることを特徴とする。
In order to solve the above problems, the present invention provides:
A position information acquisition device,
A positioning unit capable of positioning the position of the position information acquisition device;
A communication unit capable of receiving a signal transmitted from at least one transmitter installed in advance;
A control unit that stops the operation of the positioning unit when the communication unit is receiving the signal from the transmitter;
It is characterized by providing.
本発明によれば、大掛かりなインフラを整備することなく、容易に正確な位置情報を取得するとともに、当該位置情報を取得する際の消費電力を抑制することができる。 According to the present invention, it is possible to easily acquire accurate position information and reduce power consumption when acquiring the position information without providing a large-scale infrastructure.
以下、添付図面を参照して本発明に係る実施の形態を詳細に説明する。なお、本発明は、図示例に限定されるものではない。 Embodiments according to the present invention will be described below in detail with reference to the accompanying drawings. The present invention is not limited to the illustrated example.
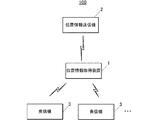
図1〜図4を参照して、本実施の形態の装置構成を説明する。先ず、図1を参照して、本実施の形態の測位補助システム100を説明する。図1は、本実施の形態の測位補助システム100の概略構成を示す図である。
With reference to FIGS. 1-4, the apparatus structure of this Embodiment is demonstrated. First, with reference to FIG. 1, the
測位補助システム100は、位置情報取得装置1と、位置情報送信機2と、一つ又は複数の発信機3とを備える。
The
位置情報取得装置1は、図4(a)に示すように、登山者としてのユーザに装着又は携帯されて、ユーザとともに移動する電子機器である。ここでは、位置情報取得装置1が位置情報(経路情報)を取得するための専用の電子機器であるものとして説明するが、これに限定されるものではなく、位置情報取得装置1が、スマートフォン、タブレットPC(Personal Computer)、携帯電話機、PDA(Personal Digital Assistant)、ノートPC等であるものとしてもよい。
As illustrated in FIG. 4A, the position
位置情報送信機2は、例えば、図4(b)に示すように、スタンド型をなしており、登山口等に設置され、ユーザがこれから登山を行うコースに設置されている少なくとも一つの発信機3の設置位置を示す発信機設置位置情報242を位置情報取得装置1に送信する。
The
発信機3は、BLE(Bluetooth(登録商標) Low Energy)を使用したビーコン発信機である。発信機3は、例えば、図4(c)に示すように、多面体をなしており、登山を行うコースのうちの、GPS電波の受信が困難である難測位区域(設置領域)に設置されている。発信機3は、図4(d)に示すように、この発信機3の識別情報であるUUID(Universally Unique Identifier)値D1、major値D2、及び、minor値D3を、発信機情報として発信する。なお、UUID値D1、major値D2、及び、minor値D3については後述する。
The
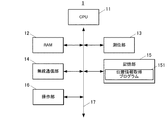
次いで、図2を参照して、位置情報取得装置1の内部の機能構成を説明する。図2は、位置情報取得装置1の機能構成を示すブロック図である。
Next, the internal functional configuration of the position
図2に示すように、位置情報取得装置1は、CPU(Central Processing Unit)11と、RAM(Random Access Memory)12と、測位部13と、無線通信部14と、記憶部15と、操作部16と、を備える。位置情報取得装置1の各部は、バス17を介して接続されている。
As illustrated in FIG. 2, the position
CPU11は、位置情報取得装置1の各部を制御する。CPU11は、記憶部15に記憶されているシステムプログラム及びアプリケーションプログラムのうち、指定されたプログラムを読み出してRAM12に展開し、当該プログラムとの協働で、各種処理を実行する。
The
RAM12は、揮発性のメモリであり、各種のデータやプログラムを一時的に格納するワークエリアを形成する。
The
測位部13は、GPS衛星から送信された信号を受信して、位置情報取得装置1が存在する地理的な位置を測位する(GPS測位)。すなわち、測位部13は、例えば、地球低軌道に打ち上げられている複数のGPS衛星から送信される信号(例えば、C/A(Coarse and Acquisitions)コードやP(Precise)コード等の測位符号、アルマナック情報(概略軌道情報)やエフェメリス情報(詳細軌道情報)等の航法メッセージなど)を所定のタイミングで受信アンテナ(図示省略)により受信する。そして、測位部13は、受信アンテナにより受信された信号に基づいて、例えば、3次元測位モードで位置情報取得装置1の3次元の位置(緯度、経度、高さ)を測定する測位処理を行う。
The
無線通信部14は、アンテナ、変復調回路、信号処理回路等により構成され、同期通信方式の無線通信(例えば、BLE等)によりデータを送受信するものである。
The
記憶部15は、フラッシュメモリ、EEPROM(Electrically Erasable Programmable ROM)等により構成され、データ及びプログラムを書き込み及び読み出し可能な記憶部である。特に、記憶部15には、位置情報取得プログラム151が記憶されている。
The
操作部16は、当該位置情報取得装置1の操作を行うためのものである。具体的には、操作部16は、例えば、装置本体の電源のON/OFFに係る電源ボタン、モードや機能等の選択指示に係る選択決定ボタン(何れも図示略)等を備えている。そして、ユーザにより各種ボタンが操作されると、操作部16は、操作されたボタンに応じた操作指示をCPU11に出力する。CPU11は、操作部16から出力され入力された操作指示に従って所定の動作を各部に実行させる。
The
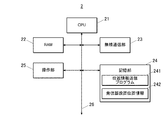
次いで、図3を参照して、位置情報送信機2の機能構成を説明する。図3は、位置情報送信機2の機能構成を示すブロック図である。
Next, the functional configuration of the
位置情報送信機2は、CPU21と、RAM22と、無線通信部23と、記憶部24と、操作部25とを備える。位置情報送信機2の各部は、バス26を介して接続されている。
The
CPU21は、位置情報送信機2の各部を制御する。CPU21は、記憶部24に記憶されているシステムプログラム及びアプリケーションプログラムのうち、指定されたプログラムを読み出してRAM22に展開し、当該プログラムとの協働で、各種処理を実行する。
The
RAM22は、揮発性のメモリであり、各種のデータやプログラムを一時的に格納するワークエリアを形成する。
The
無線通信部23は、アンテナ、変復調回路、信号処理回路等により構成され、同期通信方式の無線通信(例えば、BLE等)によりデータを送受信するものである。
The
記憶部24は、HDD(Hard Disk Drive)、SSD(Solid State Drive)等により構成され、データ及びプログラムを書き込み及び読み出し可能な記憶部である。特に、記憶部24は、位置情報送信プログラム241、発信機設置位置情報242等を記憶している。
The
発信機設置位置情報242は、位置情報送信機2が設置されている場所を出発地点とするコースに設置されている発信機3の設置位置を示すデータである。図5に示すように、発信機設置位置情報242は、同図(a)のUUID値D1と、同図(b)のmajor値D2と、同図(c)の位置情報データテーブルDTとを備えている。UUID値D1は、発信機3の個体を識別するためのIDであり、位置情報取得用の発信機3の個体識別用に割り当てられている。つまり、他の目的のために発信機が配置されている場合は別のIDが割り当てられる。major値D2は、登山のコース(又は、エリア)を識別するための値である。一の発信機3が複数のコースを網羅している場合は、コースごとに互いに異なるmajor値D2が割り振られ、このmajor値D2の各々に対応する複数の位置情報データテーブルDTが存在することになる。
The transmitter
位置情報データテーブルDTは、minor値D3の項目と、Location値D4の項目と、group値D5の項目を有している。minor値D3は、コース内の各発信機3を識別するための値である。また、minor値D3は、コース内の所定の経路順(P0からP5の方向)に応じて順次増加する値(番号)となっている。Location値D4は、コース内の各発信機3の設置位置の緯度・経度を示す情報である。group値D5は、コース内の発信機3が属するグループを示す情報である。発信機3は難測位区域(設置領域)に設置されるが、一つのコース上に複数の難測位区域が存在する場合もあるため、当該難測位区域ごとにグループ分けして、各難測位区域に対して互いに異なるグループ番号が割り振られている。
The position information data table DT has an item of minor value D3, an item of location value D4, and an item of group value D5. The minor value D3 is a value for identifying each
操作部25は、当該位置情報送信機2の操作を行うためのものである。具体的には、操作部25は、例えば、装置本体の電源のON/OFFに係る電源ボタン、発信機設置位置情報242を送信する際に当該位置情報送信機2をアドバタイズ状態に移行させるためのボタン(何れも図示略)等を備えている。そして、ユーザにより各種ボタンが操作されると、操作部25は、操作されたボタンに応じた操作指示をCPU21に出力する。CPU21は、操作部25から出力され入力された操作指示に従って所定の動作を各部に実行させる。
The
次に、図6〜図8を参照して、測位補助システム100の動作を説明する。図6は、位置情報送信処理を示すフローチャートである。図7は、位置情報取得処理を示すフローチャートである。図8は、位置情報取得処理によって位置情報を取得するコース(登山コース)の一例を示す図である。
Next, the operation of the
先ず、図6を参照して、位置情報送信機2で実行される位置情報送信処理を説明する。位置情報送信処理は、位置情報送信機2の記憶部24に記憶されている発信機設置位置情報242を位置情報取得装置1に送信する処理である。位置情報送信機2において、操作部25を介して、装置本体へ電源が投入されたことをトリガとして、CPU21が記憶部24から読み出して適宜RAM22に展開した位置情報送信プログラム241との協働で、位置情報送信処理を実行する。
First, the position information transmission process executed by the
先ず、CPU21は、ユーザによる操作部25の操作に基づき、発信機設置位置情報242の送信開始指示操作がなされたか否かを判定する(ステップS1)。
ステップS1において、送信開始指示操作がなされていないと判定された場合(ステップS1;NO)は、ステップS1の判定処理を繰り返し行う。
一方、ステップS1において、送信開始指示操作がなされたと判定された場合(ステップS1;YES)、CPU21は、タイムアウトしたか否かを判定する(ステップS2)。
First, the
If it is determined in step S1 that the transmission start instruction operation has not been performed (step S1; NO), the determination process in step S1 is repeated.
On the other hand, when it is determined in step S1 that a transmission start instruction operation has been performed (step S1; YES), the
ステップS2において、タイムアウトしたと判定された場合(ステップS2;NO)は、ステップS1へ戻る。
一方、ステップS2において、タイムアウトしていないと判定された場合(ステップS2;YES)、CPU21は、無線通信部23を介して、位置情報取得装置1との通信接続が完了したか否かを判定する(ステップS3)。
If it is determined in step S2 that time-out has occurred (step S2; NO), the process returns to step S1.
On the other hand, when it is determined in step S2 that the time-out has not occurred (step S2; YES), the
ステップS3において、位置情報取得装置1との通信接続が完了していないと判定された場合(ステップS3;NO)は、ステップS2へ戻りそれ以降の処理を行う。
一方、ステップS3において、位置情報取得装置1との通信接続が完了したと判定された場合(ステップS3;YES)、CPU21は、無線通信部23を介して、通信接続がなされた位置情報取得装置1に発信機設置位置情報242を送信し(ステップS4)、ステップS1へ戻りそれ以降の処理を繰り返し行う。
If it is determined in step S3 that the communication connection with the position
On the other hand, when it is determined in step S3 that the communication connection with the position
次いで、図7を参照して、位置情報取得装置1で実行される位置情報取得処理を説明する。位置情報取得処理は、ユーザが登山を行う際にコースの位置情報(経路情報)を取得する処理である。位置情報取得装置1において、操作部16を介して、装置本体へ電源が投入されたことをトリガとして、CPU11が記憶部15から読み出して適宜RAM12に展開した位置情報取得プログラム151との協働で、位置情報取得処理を実行する。
Next, the position information acquisition process executed by the position
なお、図8に示すように、P0からP5までのコースRをP0からP5の方向にユーザが登山した場合を想定して、位置情報取得装置1で実行される位置情報取得処理を説明する。但し、本実施形態はこのコースRをP0からP5の方向に進む場合に限るものではなく、このコースRをP5からP0の方向に進む場合にも同様に実施可能である。
ここで、P0は登山口である。登山口P0は、天空が開けた場所(例えば、駐車場)であり、GPS電波を安定して受信できる場所となっている。P0〜P1は、例えば、天空が開けた林道であり、P0と同様、GPS電波を安定して受信できる区域となっている。このため、P0〜P1の道沿いには、発信機3は設置されていない。P1〜P2は、例えば、切り立った渓谷に沿った巻き道等であり、上空が遮られておりGPS電波を受信し難い区域(難測位区域)F1となっている。このため、P1〜P2の道沿いには、発信機3a〜3eが設置されている。P2〜P3は、例えば、天空が開けた登山道であり、GPS電波を安定して受信できる区域となっている。このため、P2〜P3の道沿いには、発信機3は設置されていない。P3〜P4は、例えば、上空が遮られた林道となっており、GPS電波を受信し難い区域(難測位区域)F2となっている。このため、P3〜P4の道沿いには、発信機3f〜3hが設置されている。P4〜P5は、例えば、天空が開けた尾根伝いの道であり、GPS電波を安定して受信できる区域となっている。このため、P4〜P5の道沿いには、発信機3は設置されていない。
As shown in FIG. 8, the position information acquisition process executed by the position
Here, P0 is a trailhead. The mountain climbing port P0 is a place where the sky is open (for example, a parking lot) and is a place where GPS radio waves can be received stably. P0 to P1 are, for example, forest roads where the sky is open and, like P0, are areas where GPS radio waves can be stably received. For this reason, the
先ず、CPU11は、ユーザによる操作部16の操作に基づき、無線通信部14を介して、登山口P0に設置されている位置情報送信機2とのBLE通信の接続を開始させる通信接続開始指示操作がなされたか否かを判定する(ステップS11)。
ステップS11において、通信接続開始指示操作がなされていないと判定された場合(ステップS11;NO)は、ステップS11の判定処理を繰り返し行う。
一方、ステップS11において、通信接続開始指示操作がなされたと判定された場合(ステップS11;YES)、CPU11は、無線通信部14を介して、登山口P0に設置されている位置情報送信機2との通信接続が完了したか否かを判定する(ステップS12)。
First, the
If it is determined in step S11 that the communication connection start instruction operation has not been performed (step S11; NO), the determination process in step S11 is repeated.
On the other hand, when it is determined in step S11 that a communication connection start instruction operation has been performed (step S11; YES), the
ステップS12において、登山口P0に設置されている位置情報送信機2との通信接続が完了していないと判定された場合(ステップS12;NO)は、ステップS12の判定処理を繰り返し行う。
一方、ステップS12において、登山口P0に設置されている位置情報送信機2との通信接続が完了したと判定された場合(ステップS12;YES)、CPU11は、無線通信部14を介して、発信機設置位置情報242を受信する(ステップS13)。
In step S12, when it is determined that the communication connection with the
On the other hand, when it is determined in step S12 that the communication connection with the
次いで、CPU11は、発信機設置位置情報242を受信してから所定時間(例えば、数分間)が経過したか否かを判定する(ステップS14)。
ステップS14において、発信機設置位置情報242を受信してから所定時間(例えば、数分間)が経過したと判定された場合(ステップS14;YES)は、ステップS17へ移行する。
一方、ステップS14において、発信機設置位置情報242を受信してから所定時間(例えば、数分間)が経過していないと判定された場合(ステップS14;NO)、CPU11は、無線通信部14を介して、発信機3から発信機情報を受信したか否かを判定する(ステップS15)。
Next, the
If it is determined in step S14 that a predetermined time (for example, several minutes) has elapsed since the transmitter
On the other hand, when it is determined in step S14 that a predetermined time (for example, several minutes) has not elapsed since the transmitter
ステップS15において、発信機3から発信機情報を受信していないと判定された(ステップS15;NO)は、ステップS14へ戻りそれ以降の処理を行う。
一方、ステップS15において、発信機3から発信機情報を受信したと判定された(ステップS15;YES)、CPU11は、ステップS13で受信した発信機設置位置情報242を参照し、発信機3から受信した発信機情報、具体的には、UUID値D1、major値D2、及び、minor値D3が適正であるか否かを判定する(ステップS16)。
If it is determined in step S15 that the transmitter information has not been received from the transmitter 3 (step S15; NO), the process returns to step S14 and the subsequent processing is performed.
On the other hand, in step S15, it is determined that the transmitter information has been received from the transmitter 3 (step S15; YES), the
ステップS16において、発信機3から受信したUUID値D1等が適正であると判定された場合(ステップS16;YES)は、ステップS23へ移行する。
一方、ステップS16において、発信機3から受信したUUID値D1等が適正でないと判定された場合(ステップS16;NO)は、ステップS14へ戻りそれ以降の処理を行う。
If it is determined in step S16 that the UUID value D1 received from the
On the other hand, when it is determined in step S16 that the UUID value D1 or the like received from the
次いで、ステップS17において、CPU11は、無線通信部14によるBLE通信機能をOFFの状態に設定し、測位部13によるGPS測位の機能をONの状態に設定する(ステップS17)。図8に示すように、登山口P0を出発した直後の数分間(P1に到着する前)は、発信機3(例えば、発信機3a)から発信機情報を受信することなく所定時間が経過することとなるので(ステップS14;YES)、ここで、位置情報取得装置1の無線通信部14によるBLE通信機能がOFFの状態に設定される一方で、測位部13によるGPS測位の機能がONの状態に設定される。
Next, in step S17, the
次いで、CPU11は、測位部13によるGPS測位を所定間隔ごとに行い、測位した位置を現在の位置として取得し、記憶部15の所定の領域に記憶する(ステップS18)。そして、CPU11は、ステップS13で受信した発信機設置位置情報242を参照し、ステップS18で記憶した測位された位置に基づいて設定される判定領域に、発信機設置位置情報242に登録されている各発信機3の設置位置の何れかが含まれているか否かを判定する(ステップS19)。すなわち、測位部13により測位された位置はGPS測位されたものであるため、データ処理の方式によってその大きさは異なるが、ある程度の誤差(10m〜数10m程度)を有している。そこで、例えば、測位された位置を中心とした、上記の誤差範囲を考慮した領域(例えば、測位された位置を中心とした半径10m〜100mの領域)を設定し、これを上記の所定の判定領域とし、この判定領域内に発信機設置位置情報242に登録されている各発信機3の設置位置の何れかが含まれているか否かを判定する。これにより、判定領域内に発信機設置位置情報242に登録されている各発信機3の設置位置の何れかが含まれている場合には、測位された位置は何れかの発信機3の近傍であると判定することができ、判定領域内に発信機設置位置情報242に登録されている各発信機3の設置位置の何れも含まれていない場合には、測位された位置は各発信機3の近傍ではないと判定することができる。
Next, the
ステップS19において、測位された位置に基づいて設定される判定領域に各発信機3の設置位置の何れも含まれていないと判定された場合(ステップS19;NO)は、ステップS18へ戻りそれ以降の処理を行う。つまり、図8に示すように、登山口P0を出発してからP1に到着するまでの道のりでは、測位部13によるGPS測位が所定間隔ごとに継続して行われることとなる。
一方、ステップS19において、測位された位置に基づいて設定される判定領域内に各発信機3の設置位置の何れかが含まれていると判定された場合(ステップS19;YES)、CPU11は、無線通信部14によるBLE通信機能をONの状態に設定し、測位部13によるGPS測位の機能をOFFの状態に設定する(ステップS20)。すなわち、図8に示すように、例えば、ユーザがP1に到着して、現在の位置(P1)が発信機3aの近傍となったと判定されたとき、ユーザが難測位区域F1内に進入したと推定されて、CPU11は、かかる場合に無線通信部14によるBLE通信機能をONの状態に設定し、測位部13によるGPS測位の機能をOFFの状態に設定するのである。
If it is determined in step S19 that none of the installation positions of the
On the other hand, when it is determined in step S19 that any one of the installation positions of the
次いで、CPU11は、無線通信部14を介して、発信機3から発信機情報を受信したか否かを判定する(ステップS21)。
ステップS21において、発信機3から発信機情報を受信していないと判定された(ステップS21;NO)は、ステップS21へ戻りそれ以降の処理を行う。
一方、ステップS21において、発信機3から発信機情報を受信したと判定された(ステップS21;YES)、CPU11は、ステップS13で受信した発信機設置位置情報242を参照し、発信機3から受信した発信機情報、具体的には、UUID値D1、major値D2、及び、minor値D3が適正であるか否かを判定する(ステップS22)。
Next, the
In step S21, when it is determined that the transmitter information is not received from the transmitter 3 (step S21; NO), the process returns to step S21 and the subsequent processing is performed.
On the other hand, in step S21, it is determined that the transmitter information has been received from the transmitter 3 (step S21; YES), the
ステップS22において、発信機3から受信したUUID値D1等が適正でないと判定された場合(ステップS22;NO)は、ステップS21へ戻りそれ以降の処理を行う。
一方、ステップS22において、発信機3から受信したUUID値D1等が適正であると判定された場合(ステップS22;YES)、CPU11は、ステップS13で受信した発信機設置位置情報242を参照し、発信機3から受信した発信機情報と合致するLocation値D4における発信機3の設置位置を現在の位置として取得し、記憶部15の所定の領域に記憶する(ステップS23)。
If it is determined in step S22 that the UUID value D1 or the like received from the
On the other hand, when it is determined in step S22 that the UUID value D1 received from the
次いで、CPU11は、ステップS13で受信した発信機設置位置情報242を参照し、ステップS23で記憶した現在の位置、すなわち発信機3の設置位置がグループ内(同一難測位区域)の、ユーザの進行方向において最終の発信機3の設置位置であるか否かを判定する(ステップS24)。ここで、CPU11は、ユーザの進行方向を、例えば、GPS測位を行っている間においてコースR上における所定間隔毎に測位された結果に基づいて判定することができる。また、各発信機3から発信される発信機情報におけるminor値D3はこのコースRをP0からP5の進行方向に進んだ場合に順次増加する値となっている。そして、CPU11は、進行方向がP0からP5に進む方向であると判定した場合は、発信機3から発信される発信機情報におけるminor値D3がグループ内での最大の値となったとき、その発信機3の設置位置はそのグループ内の最後の発信機3の設置位置であると判定する。また、CPU11は、進行方向がP5からP0に進む方向であると判定した場合は、発信機3から発信される発信機情報におけるminor値D3がグループ内での最小の値となったとき、その発信機3の設置位置はそのグループ内の最後の発信機3の設置位置であると判定する。
ステップS24において、発信機3の設置位置がグループ内(同一難測位区域)の最終の発信機3の設置位置でないと判定された場合(ステップS24;NO)、ステップS21に戻りそれ以降の処理を行う。つまり、図8に示すように、ユーザがP1からP2へ移動している間であって、無線通信部14を介して、発信機3a〜3dから各発信機情報が受信されている間はステップS21〜ステップS24の処理を繰り返し行うこととなる。
一方、ステップS24において、発信機3の設置位置がグループ内(同一難測位区域)の最終の発信機3の設置位置であると判定された場合(ステップS24;YES)、ステップS17に戻りそれ以降の処理を行う。つまり、図8に示すように、ユーザがP1からP2へ移動して、無線通信部14を介して、発信機3eから発信機情報が受信された場合、それ以降はユーザが難測位区域F1から出ることになるので、無線通信部14によるBLE通信機能をOFFの状態に設定し、測位部13によるGPS測位の機能をONの状態に設定して(ステップS17)、ユーザがP2からP3へ移動している間は測位部13によるGPS測位が行われることとなる。なお、ユーザがP3からP4へ移動する間の処理内容は、ユーザがP1からP2へ移動する間の処理内容と同様であり、また、ユーザがP4からP5へ移動する間の処理内容は、ユーザがP2からP3へ移動する間の処理内容と同様であるため、その説明は省略する。
Next, the
In step S24, when it is determined that the installation position of the
On the other hand, when it is determined in step S24 that the installation position of the
以上、本実施の形態によれば、位置情報取得装置1は、位置情報取得装置1の位置を測位する測位部13と、ユーザが通過予定の設置領域(難測位区域F1,F2)に設置されている発信機3から発信される当該発信機3の識別情報(発信機情報)を受信可能な通信部(無線通信部14)と、ユーザが通過予定の設置領域(難測位区域F1,F2)に設置されている発信機3の設置位置と当該発信機3の識別情報とを対応付けて記憶する記憶部15と、制御部(CPU11)と、を備える。また、位置情報取得装置1は、測位部13によって測位された位置と、記憶部15に記憶されている発信機3の設置位置と、に基づいて、測位された位置が発信機3の設置位置の近傍であるか否かを判定し、測位部13によって測位された位置が発信機3の設置位置の近傍であると判定された場合、当該測位部13の動作を停止させ、通信部(無線通信部14)が発信機3から発信される当該発信機3の識別情報を受信するように制御する。
As described above, according to the present embodiment, the position
このため、本実施の形態の位置情報取得装置1によれば、測位部13によって測位された位置と、記憶部15に記憶されている発信機3の設置位置と、に基づいて、測位部13による測位と、無線通信部14による通信との排他切替をシームレスに行うことができるようになる。
これにより、難測位区域F1,F2に進入したことをユーザが意識しなくても、複数の発信機3から発信される発信機情報に基づき現在の位置を取得することができる。また、難測位区域F1,F2では測位部13の動作が停止されるので、測位部13による消費電力を抑制することができる。
従って、本実施の形態の位置情報取得装置1によれば、大掛かりなインフラを整備することなく、容易に正確な位置情報を取得するとともに、当該位置情報を取得する際の消費電力を抑制することができる。
Therefore, according to the position
As a result, the current position can be acquired based on the transmitter information transmitted from the plurality of
Therefore, according to the position
また、本実施の形態によれば、位置情報取得装置1は、無線通信部14によって発信機3から当該発信機3の識別情報を受信した際、当該発信機3の設置位置が、ユーザが通過予定の設置領域(難測位区域F1,F2)における、ユーザの進行方向において最後の発信機3の設置位置であるか否かを判定し、当該発信機3の設置位置が、ユーザが通過予定の設置領域における最後の発信機3の設置位置であると判定された場合、無線通信部14の通信接続を切断するとともに、測位部13による測位を開始する。
このため、本実施の形態の位置情報取得装置1によれば、発信機3の設置位置が、ユーザが通過予定の設置領域(難測位区域F1,F2)における最後の発信機3の設置位置であると判定された場合にも、測位部13による測位と、無線通信部14による通信との排他切替をシームレスに行うことができるようになる。
これにより、難測位区域F1,F2から出たことをユーザが意識しなくても、測位部13のGPS測位に基づき位置を取得することができる。また、難測位区域F1,F2以外では無線通信部14による通信が自動的に切断されるので、無線通信部14による消費電力を抑制することができる。
従って、本実施の形態の位置情報取得装置1によれば、大掛かりなインフラを整備することなく、容易に正確な位置情報を取得するとともに、当該位置情報を取得する際の消費電力を抑制することができる。
Further, according to the present embodiment, when the position
For this reason, according to the position
Accordingly, the position can be acquired based on the GPS positioning of the
Therefore, according to the position
また、本実施の形態によれば、位置情報取得装置1は、ユーザが通過予定の設置領域(難測位区域F1,F2)に設置されている複数の発信機3に対して、各発信機3の各々の設置位置と当該発信機3の識別情報と、更に、コースRの所定の経路順に応じた各番号(minor値)を対応付けて記憶部15に記憶しているので、発信機3の設置位置が、各設置領域(難測位区域F1,F2)におけるユーザの進行方向において最後の発信機3の設置場所であるか否かの判定を効率よく行うことができる。
In addition, according to the present embodiment, the position
以上の説明では、本発明に係るプログラムのコンピュータ読み取り可能な媒体として記憶部15のフラッシュメモリ、EEPROMを使用した例を開示したが、この例に限定されない。その他のコンピュータ読み取り可能な媒体として、CD−ROM等の可搬型記録媒体を適用することが可能である。また、本発明に係るプログラムのデータを、通信回線を介して提供する媒体として、キャリアウエーブ(搬送波)も本発明に適用される。
In the above description, the example in which the flash memory and the EEPROM of the
なお、上記実施の形態における記述は、本発明に係る位置情報取得装置、測位補助システム、位置情報取得方法及びプログラムの一例であり、これに限定されるものではない。 The description in the above embodiment is an example of the position information acquisition device, the positioning assistance system, the position information acquisition method, and the program according to the present invention, and the present invention is not limited to this.
例えば、上記実施の形態では、図8に示すように、P0〜P5のコースRには、2つの難測位区域F1,F2がある場合を一例として説明を行ったが、これに限定されるものではない。例えば、一つのコースに難測位区域が3つ以上あってもよいし、一つであってもよい。また、一つの難測位区域に設置される発信機3の数は、当該区域の広さに応じて適宜変更可能である。
For example, in the above embodiment, as shown in FIG. 8, the course R of P0 to P5 has been described as an example in which there are two difficult positioning areas F1 and F2, but the present invention is not limited to this. is not. For example, there may be three or more difficult positioning areas in one course, or one. In addition, the number of
また、上記実施の形態では、図8に示すように、登山口P0を出発地点とするコースが一つの場合を一例として説明を行ったが、これに限定されるものではない。例えば、登山口P0を出発地点とするコースが複数あってもよい。かかる場合、位置情報送信機2は、コースの数に応じて複数の発信機設置位置情報242を記憶部24に記憶する。そして、位置情報送信機2は、ユーザによる操作部25の操作に基づき、複数の発信機設置位置情報242のうちのこのユーザが所望の発信機設置位置情報242が選択されて指定された場合、指定された発信機設置位置情報242を位置情報取得装置1に送信するようにする。
Moreover, in the said embodiment, as shown in FIG. 8, although the case where there was one course from the mountain climbing point P0 was demonstrated as an example, it is not limited to this. For example, there may be a plurality of courses starting from the mountain starting point P0. In such a case, the
また、上記実施の形態における測位補助システム100の各構成要素の細部構成及び細部動作に関しては、本発明の趣旨を逸脱することのない範囲で適宜変更可能であることは勿論である。
Moreover, it is needless to say that the detailed configuration and detailed operation of each component of the
本発明の実施の形態を説明したが、本発明の範囲は、上述の実施の形態に限定するものではなく、特許請求の範囲に記載された発明の範囲とその均等の範囲を含む。
以下に、この出願の願書に最初に添付した特許請求の範囲に記載した発明を付記する。付記に記載した請求項の項番は、この出願の願書に最初に添付した特許請求の範囲の通りである。
〔付記〕
<請求項1>
位置情報取得装置であって、
前記位置情報取得装置の位置を測位可能な測位部と、
予め設置されている少なくとも一つの発信機から発信される信号を受信可能な通信部と、
前記通信部が前記発信機から前記信号を受信しているとき前記測位部の動作を停止させる制御部と、
を備えることを特徴とする位置情報取得装置。
<請求項2>
前記位置情報取得装置は、前記発信機の設置位置を示す情報と当該発信機を識別するための情報とを対応付けて発信機設置位置情報として記憶している記憶部を備え、
前記制御部は、前記測位部によって測位された前記位置に基づいて設定される判定領域に前記発信機設置位置情報に基づく前記発信機の前記設置位置が含まれているとき、前記測位部の動作を停止させ、前記通信部が前記発信機から前記信号を受信するように制御することを特徴とする請求項1に記載の位置情報取得装置。
<請求項3>
前記制御部は、
前記判定領域に前記発信機の前記設置位置が含まれていないときに、前記測位部に前記測位を行わせ、前記通信部の動作を停止させるように制御することを特徴とする請求項2に記載の位置情報取得装置。
<請求項4>
前記判定領域は、前記測位部における測定誤差に基づいて設定されていることを特徴とする請求項2又は3に記載の位置情報取得装置。
<請求項5>
前記発信機は、前記信号として当該発信機の識別情報を発信し、
前記制御部は、
前記通信部が前記発信機から前記識別情報を受信したとき、前記識別情報と前記発信機設置位置情報とに基づいて前記発信機を識別し、前記発信機設置位置情報に基づく当該発信機の設置位置を、前記位置情報取得装置の現在の位置として取得することを特徴とする請求項2から4の何れか一項に記載の位置情報取得装置。
<請求項6>
前記位置情報取得装置はユーザに装着又は携帯されて、前記ユーザとともに移動し、
前記発信機は前記ユーザが通過予定の設置領域に複数設置されており、
前記制御部は、
前記通信部が複数の前記発信機の何れかから前記識別情報を受信した際、前記発信機設置位置情報に基づいて、当該発信機の設置位置が、前記設置領域における、前記ユーザの進行方向において最後の位置に設置されている前記発信機の特定の設置位置であるか否かを判定し、
当該発信機の設置位置が前記特定の設置位置であると判定した場合、当該通信部による前記識別情報の受信を停止させるとともに、前記測位部による測位を開始させるように制御することを特徴とする請求項5に記載の位置情報取得装置。
<請求項7>
前記複数の発信機は前記設置領域における前記ユーザが通過する予定の経路に沿って設置されており、
前記記憶部は、前記複数の発信機の各々に、前記設置領域における前記経路を前記ユーザが一の進行方向で通過する場合の道順に応じた互いに異なる番号を対応付けて記憶していることを特徴とする請求項6に記載の位置情報取得装置。
<請求項8>
ユーザに装着又は携帯される位置情報取得装置と、当該位置情報取得装置とは別に設けられている位置情報送信機、並びに、予め設置されている少なくとも一つの発信機とを備え、
前記位置情報取得装置と、前記位置情報送信機並びに前記発信機とは相互に通信可能であり、
前記位置情報送信機は、前記発信機の設置位置を示す情報と当該発信機を識別する情報とが対応付けられている発信機設置位置情報を送信し、
前記位置情報取得装置は、前記位置情報取得装置の位置を測位可能な測位部と、前記位置情報送信機から送信される前記発信機設置位置情報、及び、前記発信機から発信される信号を受信可能な通信部と、前記通信部が前記発信機から前記信号を受信しているとき前記測位部の動作を停止させる制御部と、を備えることを特徴とする測位補助システム。
<請求項9>
位置情報取得装置における位置情報取得方法であって、
前記位置情報取得装置は、前記位置情報取得装置の位置を測位可能な測位部と、予め設置されている少なくとも一つの発信機から発信される信号を受信可能な通信部と、を備え、
前記通信部が前記発信機から前記信号を受信しているとき、前記測位部の動作を停止させる第1制御ステップを含むことを特徴とする位置情報取得方法。
<請求項10>
前記位置情報取得装置は、前記発信機の設置位置を示す情報と当該発信機を識別するための情報とを対応付けて発信機設置位置情報として記憶している記憶部を備え、
前記測位部によって測位された前記位置に基づいて設定される判定領域に前記発信機設置位置情報に基づく前記発信機の前記設置位置が含まれているとき、前記測位部の動作を停止させ、前記通信部が前記発信機から前記信号を受信するように制御する第2制御ステップを含むことを特徴とする請求項9に記載の位置情報取得方法。
<請求項11>
位置情報取得装置におけるプログラムであって、
前記位置情報取得装置は、前記位置情報取得装置の現在位置を測位可能な測位部と、予め設置されている少なくとも一つの発信機から発信される信号を受信可能な通信部と、を備え、
前記プログラムは、
コンピュータに、
前記通信部が前記発信機から前記信号を受信しているとき、前記測位部の動作を停止させるように制御させる、
ことを特徴とするプログラム。
Although the embodiments of the present invention have been described, the scope of the present invention is not limited to the above-described embodiments, but includes the scope of the invention described in the claims and the equivalents thereof.
The invention described in the scope of claims attached to the application of this application will be added below. The item numbers of the claims described in the appendix are as set forth in the claims attached to the application of this application.
[Appendix]
<Claim 1>
A position information acquisition device,
A positioning unit capable of positioning the position of the position information acquisition device;
A communication unit capable of receiving a signal transmitted from at least one transmitter installed in advance;
A control unit that stops the operation of the positioning unit when the communication unit is receiving the signal from the transmitter;
A position information acquisition device comprising:
<Claim 2>
The position information acquisition device includes a storage unit that stores information indicating an installation position of the transmitter and information for identifying the transmitter in association with each other and stores the information as transmitter installation position information.
When the control unit includes the installation position of the transmitter based on the transmitter installation position information in a determination area set based on the position measured by the positioning unit, the operation of the positioning unit The position information acquisition apparatus according to
<Claim 3>
The controller is
3. The control according to
<Claim 4>
The position information acquisition apparatus according to
<Claim 5>
The transmitter transmits identification information of the transmitter as the signal,
The controller is
When the communication unit receives the identification information from the transmitter, the transmitter is identified based on the identification information and the transmitter installation position information, and the transmitter is installed based on the transmitter installation position information. 5. The position information acquisition apparatus according to
<Claim 6>
The position information acquisition device is worn or carried by a user and moves with the user,
A plurality of the transmitters are installed in an installation area where the user is scheduled to pass through,
The controller is
When the communication unit receives the identification information from any of the plurality of transmitters, based on the transmitter installation position information, the installation position of the transmitter is in the traveling direction of the user in the installation area. Determine whether it is a specific installation position of the transmitter installed in the last position,
When it is determined that the installation position of the transmitter is the specific installation position, control is performed such that reception of the identification information by the communication unit is stopped and positioning by the positioning unit is started. The position information acquisition apparatus according to claim 5.
<Claim 7>
The plurality of transmitters are installed along a route that the user plans to pass in the installation area,
The storage unit stores each of the plurality of transmitters in association with different numbers according to directions when the user passes the route in the installation area in one traveling direction. The position information acquisition apparatus according to claim 6.
<Claim 8>
A location information acquisition device worn or carried by a user, a location information transmitter provided separately from the location information acquisition device, and at least one transmitter installed in advance;
The location information acquisition device, the location information transmitter and the transmitter can communicate with each other,
The position information transmitter transmits transmitter installation position information in which information indicating an installation position of the transmitter and information for identifying the transmitter are associated with each other,
The position information acquisition device receives a positioning unit capable of measuring the position of the position information acquisition device, the transmitter installation position information transmitted from the position information transmitter, and a signal transmitted from the transmitter. A positioning assistance system comprising: a possible communication unit; and a control unit that stops the operation of the positioning unit when the communication unit is receiving the signal from the transmitter.
<Claim 9>
A position information acquisition method in a position information acquisition device,
The position information acquisition device includes a positioning unit capable of measuring the position of the position information acquisition device, and a communication unit capable of receiving a signal transmitted from at least one transmitter installed in advance.
A location information acquisition method comprising a first control step of stopping the operation of the positioning unit when the communication unit is receiving the signal from the transmitter.
<Claim 10>
The position information acquisition device includes a storage unit that stores information indicating an installation position of the transmitter and information for identifying the transmitter in association with each other and stores the information as transmitter installation position information.
When the installation position of the transmitter based on the transmitter installation position information is included in the determination area set based on the position measured by the positioning unit, the operation of the positioning unit is stopped, The position information acquisition method according to claim 9, further comprising a second control step of controlling a communication unit to receive the signal from the transmitter.
<Claim 11>
A program in the position information acquisition device,
The position information acquisition device includes a positioning unit capable of measuring the current position of the position information acquisition device, and a communication unit capable of receiving a signal transmitted from at least one transmitter installed in advance.
The program is
On the computer,
When the communication unit is receiving the signal from the transmitter, control to stop the operation of the positioning unit,
A program characterized by that.
100 測位補助システム
1 位置情報取得装置
11 CPU
12 RAM
13 測位部
14 無線通信部
15 記憶部
16 操作部
17 バス
2 位置情報送信機
21 CPU
22 RAM
23 無線通信部
24 記憶部
25 操作部
26 バス
3 発信機
100
12 RAM
13
22 RAM
23
Claims (11)
前記位置情報取得装置の位置を測位可能な測位部と、
予め設置されている少なくとも一つの発信機から発信される信号を受信可能な通信部と、
前記通信部が前記発信機から前記信号を受信しているとき前記測位部の動作を停止させる制御部と、
を備えることを特徴とする位置情報取得装置。 A position information acquisition device,
A positioning unit capable of positioning the position of the position information acquisition device;
A communication unit capable of receiving a signal transmitted from at least one transmitter installed in advance;
A control unit that stops the operation of the positioning unit when the communication unit is receiving the signal from the transmitter;
A position information acquisition device comprising:
前記制御部は、前記測位部によって測位された前記位置に基づいて設定される判定領域に前記発信機設置位置情報に基づく前記発信機の前記設置位置が含まれているとき、前記測位部の動作を停止させ、前記通信部が前記発信機から前記信号を受信するように制御することを特徴とする請求項1に記載の位置情報取得装置。 The position information acquisition device includes a storage unit that stores information indicating an installation position of the transmitter and information for identifying the transmitter in association with each other and stores the information as transmitter installation position information.
When the control unit includes the installation position of the transmitter based on the transmitter installation position information in a determination area set based on the position measured by the positioning unit, the operation of the positioning unit The position information acquisition apparatus according to claim 1, wherein the communication unit controls the communication unit to receive the signal from the transmitter.
前記判定領域に前記発信機の前記設置位置が含まれていないときに、前記測位部に前記測位を行わせ、前記通信部の動作を停止させるように制御することを特徴とする請求項2に記載の位置情報取得装置。 The controller is
3. The control according to claim 2, wherein when the installation position of the transmitter is not included in the determination area, the positioning unit performs the positioning and stops the operation of the communication unit. The position information acquisition device described.
前記制御部は、
前記通信部が前記発信機から前記識別情報を受信したとき、前記識別情報と前記発信機設置位置情報とに基づいて前記発信機を識別し、前記発信機設置位置情報に基づく当該発信機の設置位置を、前記位置情報取得装置の現在の位置として取得することを特徴とする請求項2から4の何れか一項に記載の位置情報取得装置。 The transmitter transmits identification information of the transmitter as the signal,
The controller is
When the communication unit receives the identification information from the transmitter, the transmitter is identified based on the identification information and the transmitter installation position information, and the transmitter is installed based on the transmitter installation position information. 5. The position information acquisition apparatus according to claim 2, wherein the position is acquired as a current position of the position information acquisition apparatus.
前記発信機は前記ユーザが通過予定の設置領域に複数設置されており、
前記制御部は、
前記通信部が複数の前記発信機の何れかから前記識別情報を受信した際、前記発信機設置位置情報に基づいて、当該発信機の設置位置が、前記設置領域における、前記ユーザの進行方向において最後の位置に設置されている前記発信機の特定の設置位置であるか否かを判定し、
当該発信機の設置位置が前記特定の設置位置であると判定した場合、当該通信部による前記識別情報の受信を停止させるとともに、前記測位部による測位を開始させるように制御することを特徴とする請求項5に記載の位置情報取得装置。 The position information acquisition device is worn or carried by a user and moves with the user,
A plurality of the transmitters are installed in an installation area where the user is scheduled to pass through,
The controller is
When the communication unit receives the identification information from any of the plurality of transmitters, based on the transmitter installation position information, the installation position of the transmitter is in the traveling direction of the user in the installation area. Determine whether it is a specific installation position of the transmitter installed in the last position,
When it is determined that the installation position of the transmitter is the specific installation position, control is performed such that reception of the identification information by the communication unit is stopped and positioning by the positioning unit is started. The position information acquisition apparatus according to claim 5.
前記記憶部は、前記複数の発信機の各々に、前記設置領域における前記経路を前記ユーザが一の進行方向で通過する場合の道順に応じた互いに異なる番号を対応付けて記憶していることを特徴とする請求項6に記載の位置情報取得装置。 The plurality of transmitters are installed along a route that the user plans to pass in the installation area,
The storage unit stores each of the plurality of transmitters in association with different numbers according to directions when the user passes the route in the installation area in one traveling direction. The position information acquisition apparatus according to claim 6.
前記位置情報取得装置と、前記位置情報送信機並びに前記発信機とは相互に通信可能であり、
前記位置情報送信機は、前記発信機の設置位置を示す情報と当該発信機を識別する情報とが対応付けられている発信機設置位置情報を送信し、
前記位置情報取得装置は、前記位置情報取得装置の位置を測位可能な測位部と、前記位置情報送信機から送信される前記発信機設置位置情報、及び、前記発信機から発信される信号を受信可能な通信部と、前記通信部が前記発信機から前記信号を受信しているとき前記測位部の動作を停止させる制御部と、を備えることを特徴とする測位補助システム。 A location information acquisition device worn or carried by a user, a location information transmitter provided separately from the location information acquisition device, and at least one transmitter installed in advance;
The location information acquisition device, the location information transmitter and the transmitter can communicate with each other,
The position information transmitter transmits transmitter installation position information in which information indicating an installation position of the transmitter and information for identifying the transmitter are associated with each other,
The position information acquisition device receives a positioning unit capable of measuring the position of the position information acquisition device, the transmitter installation position information transmitted from the position information transmitter, and a signal transmitted from the transmitter. A positioning assistance system comprising: a possible communication unit; and a control unit that stops the operation of the positioning unit when the communication unit is receiving the signal from the transmitter.
前記位置情報取得装置は、前記位置情報取得装置の位置を測位可能な測位部と、予め設置されている少なくとも一つの発信機から発信される信号を受信可能な通信部と、を備え、
前記通信部が前記発信機から前記信号を受信しているとき、前記測位部の動作を停止させる第1制御ステップを含むことを特徴とする位置情報取得方法。 A position information acquisition method in a position information acquisition device,
The position information acquisition device includes a positioning unit capable of measuring the position of the position information acquisition device, and a communication unit capable of receiving a signal transmitted from at least one transmitter installed in advance.
A location information acquisition method comprising a first control step of stopping the operation of the positioning unit when the communication unit is receiving the signal from the transmitter.
前記測位部によって測位された前記位置に基づいて設定される判定領域に前記発信機設置位置情報に基づく前記発信機の前記設置位置が含まれているとき、前記測位部の動作を停止させ、前記通信部が前記発信機から前記信号を受信するように制御する第2制御ステップを含むことを特徴とする請求項9に記載の位置情報取得方法。 The position information acquisition device includes a storage unit that stores information indicating an installation position of the transmitter and information for identifying the transmitter in association with each other and stores the information as transmitter installation position information.
When the installation position of the transmitter based on the transmitter installation position information is included in the determination area set based on the position measured by the positioning unit, the operation of the positioning unit is stopped, The position information acquisition method according to claim 9, further comprising a second control step of controlling a communication unit to receive the signal from the transmitter.
前記位置情報取得装置は、前記位置情報取得装置の現在位置を測位可能な測位部と、予め設置されている少なくとも一つの発信機から発信される信号を受信可能な通信部と、を備え、
前記プログラムは、
コンピュータに、
前記通信部が前記発信機から前記信号を受信しているとき、前記測位部の動作を停止させるように制御させる、
ことを特徴とするプログラム。 A program in the position information acquisition device,
The position information acquisition device includes a positioning unit capable of measuring the current position of the position information acquisition device, and a communication unit capable of receiving a signal transmitted from at least one transmitter installed in advance.
The program is
On the computer,
When the communication unit is receiving the signal from the transmitter, control to stop the operation of the positioning unit,
A program characterized by that.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016185560A JP2018048955A (en) | 2016-09-23 | 2016-09-23 | Positional information acquisition device, positioning auxiliary system, positional information acquisition method, and program |
| JP2021076295A JP7056787B2 (en) | 2016-09-23 | 2021-04-28 | Location information acquisition device, switching method and program |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016185560A JP2018048955A (en) | 2016-09-23 | 2016-09-23 | Positional information acquisition device, positioning auxiliary system, positional information acquisition method, and program |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021076295A Division JP7056787B2 (en) | 2016-09-23 | 2021-04-28 | Location information acquisition device, switching method and program |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018048955A true JP2018048955A (en) | 2018-03-29 |
| JP2018048955A5 JP2018048955A5 (en) | 2019-10-10 |
Family
ID=61767421
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016185560A Pending JP2018048955A (en) | 2016-09-23 | 2016-09-23 | Positional information acquisition device, positioning auxiliary system, positional information acquisition method, and program |
| JP2021076295A Active JP7056787B2 (en) | 2016-09-23 | 2021-04-28 | Location information acquisition device, switching method and program |
Family Applications After (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2021076295A Active JP7056787B2 (en) | 2016-09-23 | 2021-04-28 | Location information acquisition device, switching method and program |
Country Status (1)
| Country | Link |
|---|---|
| JP (2) | JP2018048955A (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020123305A (en) * | 2019-01-30 | 2020-08-13 | 株式会社スペース二十四インフォメーション | Victim relief system |
| US11924800B2 (en) | 2020-04-24 | 2024-03-05 | Seiko Epson Corporation | Positioning system, mobile terminal, and program |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006262175A (en) * | 2005-03-17 | 2006-09-28 | Tdk Corp | In-vehicle wireless lan apparatus |
| JP2008026259A (en) * | 2006-07-25 | 2008-02-07 | Denso Corp | Vehicle arrival determination device, and vehicle control system |
| JP2008177833A (en) * | 2007-01-18 | 2008-07-31 | Ntt Docomo Inc | Communication terminal device, communication controller, communication processing system, and communication control program |
| JP2010014640A (en) * | 2008-07-07 | 2010-01-21 | Panasonic Corp | Electronic guide system and program |
| JP2010175255A (en) * | 2009-01-27 | 2010-08-12 | Panasonic Corp | Electronic guide system and program for the same |
| JP2011027714A (en) * | 2009-06-26 | 2011-02-10 | Nissan Motor Co Ltd | Device and method for providing information |
| EP2654354A1 (en) * | 2012-04-18 | 2013-10-23 | Doro AB | Providing a current position while reducing an overall power consumption |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004126921A (en) | 2002-10-02 | 2004-04-22 | Sharp Corp | Mobile race management device and system |
-
2016
- 2016-09-23 JP JP2016185560A patent/JP2018048955A/en active Pending
-
2021
- 2021-04-28 JP JP2021076295A patent/JP7056787B2/en active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006262175A (en) * | 2005-03-17 | 2006-09-28 | Tdk Corp | In-vehicle wireless lan apparatus |
| JP2008026259A (en) * | 2006-07-25 | 2008-02-07 | Denso Corp | Vehicle arrival determination device, and vehicle control system |
| JP2008177833A (en) * | 2007-01-18 | 2008-07-31 | Ntt Docomo Inc | Communication terminal device, communication controller, communication processing system, and communication control program |
| JP2010014640A (en) * | 2008-07-07 | 2010-01-21 | Panasonic Corp | Electronic guide system and program |
| JP2010175255A (en) * | 2009-01-27 | 2010-08-12 | Panasonic Corp | Electronic guide system and program for the same |
| JP2011027714A (en) * | 2009-06-26 | 2011-02-10 | Nissan Motor Co Ltd | Device and method for providing information |
| EP2654354A1 (en) * | 2012-04-18 | 2013-10-23 | Doro AB | Providing a current position while reducing an overall power consumption |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020123305A (en) * | 2019-01-30 | 2020-08-13 | 株式会社スペース二十四インフォメーション | Victim relief system |
| US11924800B2 (en) | 2020-04-24 | 2024-03-05 | Seiko Epson Corporation | Positioning system, mobile terminal, and program |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7056787B2 (en) | 2022-04-19 |
| JP2021120680A (en) | 2021-08-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2449411B1 (en) | Trajectory-based location determination | |
| CN104114978B (en) | The navigation suspend mode and wake-up of position and event triggering | |
| CN101228457B (en) | Satellite positioning system receivers and methods | |
| US20140218235A1 (en) | Intermittent tracking for gnss | |
| CN104718429A (en) | Predictive scheduling of navigation tasks | |
| JP5169674B2 (en) | POSITION INFORMATION ACQUISITION SYSTEM, POSITION INFORMATION ACQUISITION METHOD, MOBILE COMMUNICATION TERMINAL, AND PROGRAM | |
| CN105122913A (en) | Dynamic determination of device location reporting frequency | |
| CN102818572A (en) | Portable terminal and navigation system | |
| US9720098B2 (en) | Positioning device, positioning method, and recording medium | |
| CN105052215A (en) | Mobile device power management while providing location services | |
| US20110207471A1 (en) | Method and system for determining location within a building based on historical location information | |
| JP7056787B2 (en) | Location information acquisition device, switching method and program | |
| JP2007316028A (en) | System providing position information, and mobile communication device | |
| CN110023778B (en) | Positioning method and device | |
| US8855927B2 (en) | Method for a two-way radio system to make an electronic map enabling each two-way radio to independently perform a function of GPS positioning and display under a condition of no GPS electronic map provided | |
| US10466055B2 (en) | Information processing device, portable terminal, method for controlling information processing device, and program recording medium | |
| US10739138B2 (en) | Information processing apparatus and control method | |
| JP6554679B2 (en) | Positioning system | |
| JP5249808B2 (en) | Position transmitting apparatus, position tracking system, and position transmitting method | |
| JP2020010335A (en) | Portable communication device, positioning system and positioning method | |
| JP6319623B2 (en) | Electronic device system, terminal device, electronic device system control method, and control program | |
| CN107003140A (en) | Localization method and corresponding terminal, vehicle, computer program product and storage medium | |
| CN104864888A (en) | Navigation device position modification method and device | |
| JP6623642B2 (en) | Positioning device and positioning method of positioning device | |
| JP5921972B2 (en) | Route guidance device, route guidance method, and computer program |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190830 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190830 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200826 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200908 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20201020 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20210202 |