JP2018019155A - Display controller for vehicle, display system for vehicle, display control method for vehicle and program - Google Patents
Display controller for vehicle, display system for vehicle, display control method for vehicle and program Download PDFInfo
- Publication number
- JP2018019155A JP2018019155A JP2016146001A JP2016146001A JP2018019155A JP 2018019155 A JP2018019155 A JP 2018019155A JP 2016146001 A JP2016146001 A JP 2016146001A JP 2016146001 A JP2016146001 A JP 2016146001A JP 2018019155 A JP2018019155 A JP 2018019155A
- Authority
- JP
- Japan
- Prior art keywords
- video data
- vehicle
- rear video
- unit
- display control
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images


















Landscapes
- Image Processing (AREA)
- Closed-Circuit Television Systems (AREA)
- Image Analysis (AREA)
Abstract
Description
本発明は、車両用表示制御装置、車両用表示システム、車両用表示制御方法およびプログラムに関する。 The present invention relates to a vehicle display control device, a vehicle display system, a vehicle display control method, and a program.
車両の後方周辺領域を撮影する後方カメラからの映像を表示する、いわゆる電子ミラーに関する技術が知られている。電子ミラーは、従来の光学式ルームミラーと異なり、2次元の映像の実像であるため、被撮影物の距離感を認識しにくかったり、運転者が違和感を覚えたりすることがある。そこで、自車両とカメラが撮影した物体との距離感の誤認識を抑制した車載用表示装置が知られている(例えば、特許文献1参照)。また、視野調整操作の煩雑さを解消し、違和感のない左右後方映像を表示する車両用後方視認システムが知られている(例えば、特許文献2参照)。 A technique related to a so-called electronic mirror that displays an image from a rear camera that captures a rear peripheral region of a vehicle is known. Unlike a conventional optical room mirror, the electronic mirror is a real image of a two-dimensional image, so it may be difficult to recognize the sense of distance of the subject and the driver may feel uncomfortable. Thus, an in-vehicle display device that suppresses misrecognition of a sense of distance between the host vehicle and an object photographed by a camera is known (for example, see Patent Document 1). There is also known a vehicular rearward viewing system that eliminates the complexity of the visual field adjustment operation and displays right and left rear images without a sense of incongruity (see, for example, Patent Document 2).
運転者は、運転中に車両周辺を確認するため、リヤビューモニタと、左右サイドビューモニタとを視認する。リヤビューモニタと、左右サイドビューモニタとが離れて設置されているので、車両周辺の確認には視線移動をともなう。また、運転者が運転中に短い時間で認識可能な情報量は限られている。このため、リヤビューモニタや左右サイドビューモニタには、運転者が情報を必要とするタイミングで、適切な情報量の映像を表示することが望ましい。このように、適切な車両周辺の確認を可能にする技術が望まれている。 The driver visually recognizes the rear view monitor and the left and right side view monitors in order to check the periphery of the vehicle during driving. Since the rear view monitor and the left and right side view monitors are set apart from each other, the line of sight is moved to check the surroundings of the vehicle. In addition, the amount of information that the driver can recognize in a short time during driving is limited. Therefore, it is desirable to display an image with an appropriate amount of information on the rear view monitor and the left and right side view monitors at a timing when the driver needs information. Thus, a technique that enables confirmation of an appropriate vehicle periphery is desired.
本発明は、上記に鑑みてなされたものであって、適切な車両周辺の確認を可能とすることを目的とする。 The present invention has been made in view of the above, and an object thereof is to enable appropriate confirmation of the periphery of a vehicle.
上述した課題を解決し、目的を達成するために、本発明に係る車両用表示制御装置は、車両の後方を向くように配置され、前記車両の後方を撮影する後方カメラからの後方映像データを取得する後方映像データ取得部と、前記車両の左右側方に前記車両の後方を向くように配置され、前記車両の左右側後方を撮影する側後方カメラからの側後方映像データを取得する側後方映像データ取得部と、前記車両の走行状況を示す情報を取得する走行状況情報取得部と、前記走行状況情報取得部が取得した走行状況に応じて、前記後方映像データの左右上方に前記側後方映像データを合成する映像合成部と、前記映像合成部が合成した後方映像データを、前記車両の後方映像を表示する表示装置に表示させる表示制御部と、を備えることを特徴とする。 In order to solve the above-described problems and achieve the object, a vehicle display control device according to the present invention is arranged so as to face the rear of the vehicle, and rear image data from a rear camera that captures the rear of the vehicle. A rear video data acquisition unit for acquiring, and a rear side for acquiring side rear video data from a side rear camera that is arranged to face the rear of the vehicle on the left and right sides of the vehicle and captures the left and right sides of the vehicle A video data acquisition unit, a driving status information acquisition unit that acquires information indicating the driving status of the vehicle, and the rear side of the rear video data according to the driving status acquired by the driving status information acquisition unit A video synthesis unit that synthesizes video data, and a display control unit that displays the rear video data synthesized by the video synthesis unit on a display device that displays the rear video of the vehicle.
本発明に係る車両用表示システムは、上記の車両用表示制御装置と、少なくとも前記表示装置、前記後方カメラ、前記側後方カメラのうち少なくともいずれかと、を備える。 The vehicle display system according to the present invention includes the vehicle display control device and at least one of the display device, the rear camera, and the side rear camera.
本発明に係る車両用表示制御方法は、車両の後方を向くように配置され、前記車両の後方を撮影する後方カメラからの後方映像データを取得する後方映像データ取得ステップと、前記車両の左右側方に前記車両の後方を向くように配置され、前記車両の左右側後方を撮影する側後方カメラからの側後方映像データを取得する側後方映像データ取得ステップと、前記車両の走行状況を示す情報を取得する走行状況情報取得ステップと、前記走行状況情報取得ステップが取得した走行状況に応じて、前記後方映像データの左右上方に前記側後方映像データを合成する映像合成ステップと、前記映像合成ステップが合成した後方映像データを、前記車両の後方映像を表示する表示装置に表示させる表示制御ステップと、を含む。 The vehicle display control method according to the present invention includes a rear video data acquisition step that is arranged to face the rear of the vehicle and acquires rear video data from a rear camera that captures the rear of the vehicle, and the left and right sides of the vehicle A side rear image data acquisition step for acquiring side rear image data from a side rear camera that captures the left and right rear sides of the vehicle, and information indicating a traveling state of the vehicle. A driving situation information acquisition step for acquiring the image, a video synthesis step for synthesizing the side rear video data on the left and right upper sides of the rear video data according to the driving situation acquired by the driving status information acquisition step, and the video synthesis step And a display control step of displaying the rear video data synthesized by the information on a display device that displays the rear video of the vehicle.
本発明に係るプログラムは、車両の後方を向くように配置され、前記車両の後方を撮影する後方カメラからの後方映像データを取得する後方映像データ取得ステップと、前記車両の左右側方に前記車両の後方を向くように配置され、前記車両の左右側後方を撮影する側後方カメラからの側後方映像データを取得する側後方映像データ取得ステップと、前記車両の走行状況を示す情報を取得する走行状況情報取得ステップと、前記走行状況情報取得ステップが取得した走行状況に応じて、前記後方映像データの左右上方に前記側後方映像データを合成する映像合成ステップと、前記映像合成ステップが合成した後方映像データを、前記車両の後方映像を表示する表示装置に表示させる表示制御ステップと、を車両用表示制御装置として動作するコンピュータに実行させる。 The program according to the present invention is arranged so as to face the rear of the vehicle, acquires a rear video data from a rear camera that captures the rear of the vehicle, and the vehicle on the left and right sides of the vehicle. A side rear image data acquisition step for acquiring side rear image data from a side rear camera that images the left and right rear sides of the vehicle, and traveling for acquiring information indicating the traveling state of the vehicle A situation information acquisition step, a video synthesis step of synthesizing the side rear video data on the left and right upper sides of the rear video data according to the driving situation acquired by the driving status information acquisition step, and a rear synthesized by the video synthesis step A display control step of displaying video data on a display device that displays a rear image of the vehicle, and operates as a vehicle display control device To be executed by a computer.
本発明によれば、適切な車両周辺の確認を可能にすることができるという効果を奏する。 According to the present invention, there is an effect that it is possible to make it possible to appropriately check the vicinity of the vehicle.
以下に添付図面を参照して、本発明に係る車両用表示制御装置10、車両用表示システム1、車両用表示制御方法およびプログラムの実施形態を詳細に説明する。なお、以下の実施形態により本発明が限定されるものではない。
Exemplary embodiments of a vehicle
[第一実施形態]
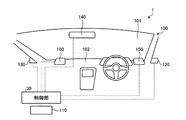
車両用表示システム1は、車両100に搭載され、車両周辺を表示する。図1は、第一実施形態に係る車両用表示システムの構成例を示す概略図である。図2は、第一実施形態に係る車両用表示システムの構成例を示す概略図である。図3は、第一実施形態に係る車両用表示システムの構成例を示すブロック図である。
[First embodiment]
The
図1ないし図3に示すように、車両用表示システム1は、後方カメラ110と、右側後方カメラ(側後方カメラ)120と、左側後方カメラ(側後方カメラ)130と、リヤビューモニタ(表示装置)140と、右サイドビューモニタ(側後方確認装置)150と、左サイドビューモニタ(側後方確認装置)160と、車両用表示制御装置10とを有する。
As shown in FIGS. 1 to 3, the
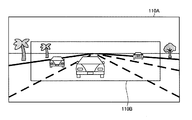
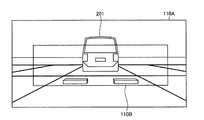
後方カメラ110は、車両100の後方に後方を向くように配置され、車両100の後方を撮影する。後方カメラ110は、水平方向の画角が例えば90〜180°、上下方向の画角が例えば45〜90°である。例えば、後方カメラ110は、図4に示すような、第一映像データ(後方映像データ)110Aを撮影している。図4は、第一実施形態に係る車両用表示システムの後方カメラで撮影された映像データの一例を示す図である。後方カメラ110は、リヤビューモニタ140に表示させる範囲より広い範囲の映像を撮影可能であるが、リヤビューモニタ140を用いて車両100の運転者が適切に後方を認識できるような範囲を切出してリヤビューモニタ140に表示する。後方カメラ110は、撮影した第一映像データ110Aを車両用表示制御装置10の映像データ取得部40の後方映像データ取得部42へ出力する。
The
右側後方カメラ120は、車両100の右側方に後方を向くように配置され、車両100の右側方を撮影する。右側後方カメラ120は、右サイドビューモニタ150による確認範囲を撮影する。右側後方カメラ120は、水平方向の画角が例えば15〜45°、上下方向の画角が例えば15〜45°である。右側後方カメラ120は、角度調節自在である。右側後方カメラ120は、撮影した映像(側後方映像データ)を車両用表示制御装置10の映像データ取得部40の側後方映像データ取得部41へ出力する。
The right
左側後方カメラ130は、車両100の左側方に後方を向くように配置され、車両100の左側方を撮影する。左側後方カメラ130は、左サイドビューモニタ160による確認範囲を撮影する。左側後方カメラ130は、水平方向の画角が例えば15〜45°、上下方向の画角が例えば15〜45°である。左側後方カメラ130は、角度調節自在である。左側後方カメラ130は、撮影した映像(側後方映像データ)を車両用表示制御装置10の映像データ取得部40の側後方映像データ取得部41へ出力する。
The left
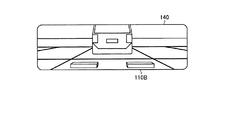
リヤビューモニタ140は、一例としては電子ルームミラーである。リヤビューモニタ140を電子ルームミラーとして用いる場合は、後方を光学的な反射により確認するためのハーフミラーの有無は問わない。リヤビューモニタ140は、例えば、液晶ディスプレイ(LCD:Liquid Crystal Display)または有機EL(Organic Electro−Luminescence)ディスプレイなどを含むディスプレイである。リヤビューモニタ140は、車両用表示制御装置10の表示制御部70から出力された映像信号に基づき、車両100の後方映像を表示する。具体的に、リヤビューモニタ140は、図5に示すような後方映像を表示する。図5は、第一実施形態に係る車両用表示システムのリヤビューモニタに表示される映像の一例を示す図である。リヤビューモニタ140は、運転者から視認容易な位置に配置されている。本実施形態では、リヤビューモニタ140は、ウィンドシールド101の車幅方向の中央上部に配置されている。または、リヤビューモニタ140は、ダッシュボード102やヘッドライナーに埋め込まれていてもよい。
The
リヤビューモニタ140は、大きさ、形状は限定されない。例えば、リヤビューモニタ140は、従来の光学式のルームミラーと同様な大きさ、形状であってもよい。または、例えば、リヤビューモニタ140は、従来の光学式のルームミラーに比べて車幅方向の幅が広くてもよい。または、例えば、リヤビューモニタ140は、従来の光学式のルームミラーに比べて縦方向の幅が広くてもよい。
The size and shape of the
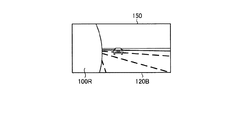
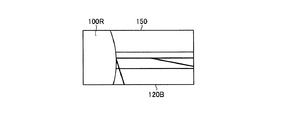
右サイドビューモニタ150は、例えば、液晶ディスプレイまたは有機ELディスプレイなどを含むディスプレイである。右サイドビューモニタ150は、車両用表示制御装置10の表示制御部70から出力された映像信号に基づき、車両100の右側後方映像を表示する。具体的に、右サイドビューモニタ150は、図6に示すような右側後方映像を表示する。図6は、第一実施形態に係る車両用表示システムの右サイドビューモニタに表示される映像の一例を示す図である。右サイドビューモニタ150には、車両100の右側方の車体100Rが映り込んでいる。右サイドビューモニタ150は、運転者から視認容易な位置に配置されている。本実施形態では、右サイドビューモニタ150は、ダッシュボード102の車幅方向の右側に配置されている。
The right
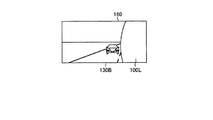
左サイドビューモニタ160は、例えば、液晶ディスプレイまたは有機ELディスプレイを含むディスプレイである。左サイドビューモニタ160は、車両用表示制御装置10の表示制御部70から出力された映像信号に基づき、車両100の左側後方映像を表示する。例えば、左サイドビューモニタ160は、図7に示すような左側後方映像を表示する。図7は、第一実施形態に係る車両用表示システムの左サイドビューモニタに表示される映像の一例を示す図である。左サイドビューモニタ160には、車両100の左側方の車体100Lが映り込んでいる。左サイドビューモニタ160は、運転者から視認容易な位置に配置されている。本実施形態では、左サイドビューモニタ160は、ダッシュボード102の車幅方向の左側に配置されている。
The left
図3に戻って、車両用表示制御装置10は、記憶部20と、制御部30とを有する。
Returning to FIG. 3, the vehicle
記憶部20は、車両用表示制御装置10における各種処理に要するデータおよび各種処理結果を記憶する。記憶部20は、例えば、RAM(Random Access Memory)、ROM(Read Only Memory)、フラッシュメモリ(Flash Memory)などの半導体メモリ素子、または、ハードディスク、光ディスク、ネットワークを介した外部記憶装置などの記憶装置である。または、図示しない通信装置を介して無線接続される外部記憶装置であってもよい。
The
制御部30は、例えば、CPU(Central Processing Unit)などで構成された演算処理装置である。制御部30は、映像データ取得部40と、映像処理部50と、走行状況情報取得部60と、表示制御部70とを含む。制御部30は、記憶部20に記憶されているプログラムに含まれる命令を実行する。
The
映像データ取得部40は、車両100の後方および側後方を撮影した映像を取得する。映像データ取得部40が取得する映像データは、例えば、毎秒60フレームの画像が連続した映像データである。映像データ取得部40は、側後方映像データ取得部41と、後方映像データ取得部42とを有する。側後方映像データ取得部41は、右側後方カメラ120および左側後方カメラ130が出力した第二映像データを取得する。側後方映像データ取得部41は、取得した第二映像データを切出部51に出力する。後方映像データ取得部42は、後方カメラ110が出力した第一映像データ110Aを取得する。後方映像データ取得部42は、取得した第一映像データ110Aを切出部51に出力する。
The video
切出部51は、第一映像データ110Aからリヤビューモニタ140に表示する後方映像データ110Bを切出す。切出部51は、第一映像データ110Aから第一映像データ110Aの一部を切出す。第一映像データ110Aのどの範囲を切出すかは、あらかじめ登録され記憶されている。本実施形態では、第一映像データ110Aの中央部を切出す。切出部51は、切出した後方映像データ110Bを映像合成部52と表示制御部70に出力する。
The
切出部51は、第二映像データから、右サイドビューモニタ150および左サイドビューモニタ160に表示する右側後方映像データ120Bおよび左側後方映像データ130Bを切出す。切出部51は、第二映像データから第二映像データの一部を切出す。第二映像データのどの範囲を切出すかは、あらかじめ登録され記憶されている。切出部51は、切出した右側後方映像データ120Bおよび左側後方映像データ130Bを映像合成部52と表示制御部70に出力する。切出部51で切出された、後方映像データ110Bと右側後方映像データ120Bおよび左側後方映像データ130Bとは、同期している。
The
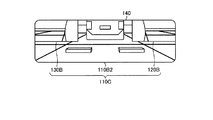
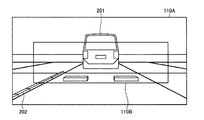
映像合成部52は、走行状況情報取得部60が取得した走行状況に応じて、後方映像データ110Bの左右上方に右側後方映像データ120Bおよび左側後方映像データ130Bを合成した後方映像データ110Cを生成する。本実施形態では、映像合成部52は、走行状況情報取得部60が、車両100が後退することを示す情報を取得したとき、後方映像データ110Bの左右上方に右側後方映像データ120Bおよび左側後方映像データ130Bを合成した後方映像データ110Cを生成する。例えば、映像合成部52は、図8に示すような合成した後方映像データ110Cを生成する。図8は、第一実施形態に係る車両用表示システムのリヤビューモニタに表示される映像の他の例を示す図である。本実施形態において、合成した後方映像データ110Cにおける右側後方映像データ120Bおよび左側後方映像データ130Bの大きさは、リヤビューモニタ140の表示面の縦方向サイズにおける上方約二分の一程度の大きさである。合成した後方映像データ110Cにおける右側後方映像データ120Bおよび左側後方映像データ130Bの大きさは、リヤビューモニタ140の表示面の横方向サイズにおける左右約三分の一程度の大きさである。映像合成部52は、合成した後方映像データ110Cを表示制御部70に出力する。
The
ここで、後方映像データ110Bにおいて、運転者にとって運転中の安全確認の必要度が高い範囲は、後方映像データ110Bの中央部分および左右下方部分の範囲である。後方映像データ110Bの中央部分には、走行路が直進であるときの消失点が含まれる。言い換えると、後方映像データ110Bの左右上方の範囲は、運転者にとって運転中の安全確認の必要度が低い。このため、映像合成部52は、後方映像データ110Bの左右上方に右側後方映像データ120Bおよび左側後方映像データ130Bを合成する。本実施形態では、合成した後方映像データ110Cにおける右側後方映像データ120Bおよび左側後方映像データ130Bの大きさをリヤビューモニタ140の表示面の縦方向サイズにおける上方約二分の一程度とし、映像が重なる範囲を小さくしている。本実施形態では、合成した後方映像データ110Cにおける右側後方映像データ120Bおよび左側後方映像データ130Bの大きさをリヤビューモニタ140の表示面の横方向サイズにおける左右約三分の一程度の大きさとし、映像が重なる範囲を小さくしている。また、後方映像データ110Bと右側後方映像データ120Bおよび左側後方映像データ130Bとの表示される境界が明瞭となるように、右側後方映像データ120Bおよび左側後方映像データ130Bを枠線等で囲うことが効果的である。
Here, in the
走行状況情報取得部60は、車両100に備えられたCAN(Controller Area Network)に接続されOBD(On Board Diagnosis)IIデータなどを取得することで、車両100における様々な走行状況情報を取得する。走行状況情報取得部60は、車両100の走行状況情報として、車両100が後退することを示す情報を取得する。より詳しくは、走行状況情報取得部60は、例えば、シフトポジション情報または進行方向情報を取得する。走行状況情報取得部60は、取得した走行状況情報を映像合成部52に出力する。
The traveling state
表示制御部70は、毎フレームまたは所定フレームごとに、後方映像データ110Bまたは映像合成部52が合成した後方映像データ110Cをリヤビューモニタ140に出力する。
The
表示制御部70は、毎フレームまたは所定フレームごとに、右側後方映像データ120Bを右サイドビューモニタ150に表示させる。言い換えると、表示制御部70は、右側後方カメラ120で撮影された第二映像データに基づく右側後方映像データ120Bを右サイドビューモニタ150に表示させる。
The
表示制御部70は、毎フレームまたは所定フレームごとに、左側後方映像データ130Bを左サイドビューモニタ160に表示させる。言い換えると、表示制御部70は、左側後方カメラ130で撮影された第二映像データに基づく左側後方映像データ130Bを左サイドビューモニタ160に表示させる。表示制御部70は、リヤビューモニタ140に表示される後方映像データ110Bまたは合成した後方映像データ110Cと、右サイドビューモニタ150に表示される右側後方映像データ120Bと、左サイドビューモニタ160に表示される左側後方映像データ130Bとが同期するように表示を制御する。
The
次に、図9を用いて、制御部30における情報処理について説明する。図9は、第一実施形態に係る車両用表示システムの車両用表示制御装置の制御部における処理の流れを示すフローチャートである。
Next, information processing in the
図9の処理における前提としては、車両100が動作している期間中、リヤビューモニタ140に後方映像データ110Bが表示され、右サイドビューモニタ150に右側後方映像データ120B、左サイドビューモニタ160に左側後方映像データ130Bが表示されている状態である。また、このような状態において、制御部30は、走行状況情報取得部60で走行状況の取得を継続している。より詳しくは、制御部30は、走行状況情報取得部60で、例えば、シフトポジション情報または進行方向情報を含む走行状況情報が発生したか常時監視している。
As a premise in the processing of FIG. 9, while the
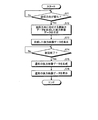
制御部30は、後退トリガの有無を判定する(ステップS11)。後退トリガとは、例えば、シフトポジションが「リバース」とされたことをいう。または、後退トリガとは、車両100の進行方向が車両100の前後方向の後方となったことをいう。制御部30は、走行状況情報取得部60で取得した走行状況情報に基づいて、後退トリガの有無を判定する。制御部30は、後退トリガがないと判定した場合(ステップS11でNo)、ステップS11の処理を再度実行する。制御部30は、後退トリガがあると判定した場合(ステップS11でYes)、ステップS12に進む。
The
ステップS11において、後退トリガがあると判定された場合、制御部30は、合成した後方映像データ110Cを生成する(ステップS12)。より詳しくは、制御部30は、切出部51で、第一映像データ110Aから後方映像データ110Bを切出させる。そして、制御部30は、映像合成部52で、後方映像データ110Bの左右上方に右側後方映像データ120Bおよび左側後方映像データ130Bを合成した後方映像データ110Cを生成させる。
If it is determined in step S11 that there is a backward trigger, the
制御部30は、ステップS12で生成した、合成した後方映像データ110Cを表示する(ステップS13)。より詳しくは、制御部30は、表示制御部70で、通常の後方映像データ110Bまたは合成した後方映像データ110Cをリヤビューモニタ140に表示させる。
The
走行状況情報取得部60は、ステップS11で後退トリガがあると判定された後も継続して走行状況を取得している。より詳しくは、制御部30は、走行状況情報取得部60で走行状況の取得を継続している。
The traveling state
ステップS13において、合成した後方映像データ110Cを表示している期間において、制御部30は、走行状況情報取得部60で取得した走行状況情報に基づいて、後退終了を判定する(ステップS14)。より詳しくは、制御部30は、走行状況情報取得部60で取得した走行状況情報に基づいて、後退トリガの解除を判定する。制御部30は、後退トリガの解除がないと判定した場合(ステップS14でNo)、合成した後方映像データ110Cの表示を継続する。制御部30は、後退トリガの解除があると判定された場合(ステップS14でYes)、制御部30は、後方映像データ110Bを生成し(ステップS15)、後方映像データ110Bを表示する(ステップS16)。すなわち、ステップS15およびステップS16は、ステップS11において後退トリガが検出される以前と同様、通常の後方映像データBの表示が開始、継続される。
In the period in which the synthesized
制御部30は、後退トリガの検出ごとに、上記の処理を繰り返す。
The
図10ないし図14を用いて、制御部30における情報処理の具体例を説明する。図10は、第一実施形態に係る車両用表示システムの後方カメラで撮影された映像データの他の例を示す図である。図11は、第一実施形態に係る車両用表示システムのリヤビューモニタに表示される映像の他の例を示す図である。図12は、第一実施形態に係る車両用表示システムの右サイドビューモニタに表示される映像の他の例を示す図である。図13は、第一実施形態に係る車両用表示システムの左サイドビューモニタに表示される映像の他の例を示す図である。図14は、第一実施形態に係る車両用表示システムのリヤビューモニタに表示される映像の他の例を示す図である。車両100は、シフトポジション「リバース」が選択されている。図10に示す第一映像データ110Aには、車両100の後方に駐車されている他車両201が映っている。制御部30は、ステップS11において、後退トリガがあると判定する(ステップS11でYes)。そして、制御部30は、ステップS12において、切出部51で、図10に示す第一映像データ110Aから、図11に示す後方映像データ110Bを切出させる。そして、制御部30は、映像合成部52で、後方映像データ110Bの右上方に、図12に示す右側後方映像データ120Bを合成し、左上方に図13に示す左側後方映像データ130Bを合成して、合成した後方映像データ110Cを生成させる。そして、制御部30は、ステップS13において、表示制御部70で、リヤビューモニタ140の表示面に、図14に示す合成した後方映像データ110Cを表示させる。
A specific example of information processing in the
このようにして、車両用表示システム1は、走行状況情報取得部60が取得した走行状況に応じて、合成した後方映像データ110Cをリヤビューモニタ140の表示面に表示させる。
In this way, the
上述したように、本実施形態は、走行状況情報取得部60が取得した走行状況に応じて、合成した後方映像データ110Cをリヤビューモニタ140の表示面に表示させる。本実施形態では、車両100の後退時、後方映像データ110Bの左右上方に右側後方映像データ120Bおよび左側後方映像データ130Bを合成した後方映像データ110Cをリヤビューモニタ140の表示面に表示させる。これにより、本実施形態は、車両100の後退時で、リヤビューモニタ140の表示面で、車両100の後方とともに、車両100の側後方を確認することができる。このため、本実施形態は、運転者の視線移動を抑制することができる。より詳しくは、本実施形態は、リヤビューモニタ140から視線移動して右サイドビューモニタ150および左サイドビューモニタ160を視認しなくても、路側方向の側後方を確認することができる。本実施形態は、運転者の後方及び側後方の確認に要する時間を低減することができる。このように、車両用表示システム1は、適切な車両100周辺の確認を可能にすることができる。
As described above, in the present embodiment, the synthesized
本実施形態によれば、車両100の後退時、合成した後方映像データ110Cをリヤビューモニタ140の表示面に表示させる。このため、本実施形態によれば、運転者による操作によらず自動で、リヤビューモニタ140の表示面で、車両100の後方とともに、車両100の側後方を表示させることができる。このように、車両用表示システム1は、適切な車両100周辺の確認を可能にすることができる。
According to the present embodiment, when the
本実施形態によれば、車両100の後退時、所定条件を満たす場合に、合成した後方映像データ110Cをリヤビューモニタ140の表示面に表示させる。言い換えると、本実施形態によれば、所定条件を満たす場合、合成した後方映像データ110Cを表示させ、その他の場合、後方映像データ110Bを表示させる。このため、本実施形態は、車両100の後退時、運転者が必要とするタイミングで、適切な情報量の映像を表示することができる。
According to the present embodiment, when the
本実施形態によれば、映像合成部52は、後方映像データ110Bの左右上方に右側後方映像データ120Bおよび左側後方映像データ130Bを合成する。言い換えると、本実施形態によれば、映像合成部52は、後方映像データ110Bの消失点より下方の範囲は、右側後方映像データ120Bおよび左側後方映像データ130Bが重なる範囲を小さくする。言い換えると、後方映像データ110Bの左右上方は、後退時の後方確認の優先度が低いとともに、右側後方映像データ120Bおよび左側後方映像データ130Bによる確認がより適切である。このため、本実施形態は、運転者にとって運転中の安全確認の必要度が高い範囲は、走行状況によらず、従来の光学式のルームミラーと同様に後方を確認することができる。
According to the present embodiment, the
[第二実施形態]
図15ないし図17を参照しながら、本実施形態に係る車両用表示システム1について説明する。図15は、第二実施形態に係る車両用表示システムの車両用表示制御装置の制御部における処理の流れを示すフローチャートである。図16は、第二実施形態に係る車両用表示システムの後方カメラで撮影された映像データの一例を示す図である。図17は、第二実施形態に係る車両用表示システムのリヤビューモニタに表示される映像の一例を示す図である。本実施形態に係る車両用表示システム1は、基本的な構成は第一実施形態の車両用表示システム1と同様である。以下の説明においては、車両用表示システム1と同様の構成要素には、同一の符号または対応する符号を付し、その詳細な説明は省略する。本実施形態の車両用表示システム1は、切出部51および制御部30における情報処理が第一実施形態の車両用表示システム1と異なる。
[Second Embodiment]
The
切出部51は、走行状況に応じて、第一映像データ110Aからの切出範囲を、通常の後方映像データ110Bの切出範囲よりも下方に設定する。より詳しくは、切出部51は、表示制御部70が映像合成部52で合成した後方映像データ110Cを表示させるとき、合成していない通常の後方映像データ110Bを表示させるときより下方を切出すように第一映像データ110Aからの切出範囲を設定する。例えば、合成していない通常の後方映像データ110Bを表示させるときの切出範囲より、所定画素下方を含むように切出範囲を設定する。言い換えると、切出部51は、表示制御部70が映像合成部52で合成した後方映像データ110Cを表示させるとき、より車両100に近い位置を切出範囲に含むように設定する。切出部51は、切出した後方映像データ110B2を映像合成部52と表示制御部70とに出力する。
The
次に、図15を用いて、制御部30における情報処理について説明する。図15に示すフローチャートのステップS21、ステップS24〜ステップS27の処理は、図9に示すフローチャートのステップS11、ステップS13〜ステップS16の処理と同様である。
Next, information processing in the
制御部30は、切出範囲を下方にシフトして後方映像データ110B2を切出す(ステップS22)。
The
制御部30は、合成した後方映像データ110Cを生成する(ステップS23)。より詳しくは、制御部30は、切出部51で切出した後方映像データ110B2の左右上方に右側後方映像データ120Bおよび左側後方映像データ130Bを合成した後方映像データ110Cを生成させる。
The
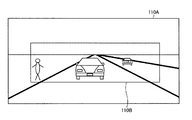
図16および図17を用いて、制御部30における情報処理の具体例を説明する。車両100は、シフトポジション「リバース」が選択されている。図16に示す第一映像データ110Aは、車両100の後方に駐車されている他車両201が映っている。制御部30は、ステップS21において、後退トリガがあると判定する(ステップS21でYes)。そして、制御部30は、ステップS22において、切出部51で、後方映像データ110Bの切出範囲を下方にシフトして、図16に示す第一映像データ110Aから後方映像データ110B2を切出させる。そして、制御部30は、ステップS23において、映像合成部52で、後方映像データ110B2の左右上方に右側後方映像データ120Bおよび左側後方映像データ130Bを合成した後方映像データ110Cを生成させる。そして、制御部30は、ステップS24において、表示制御部70で、リヤビューモニタ140の表示面に、図17に示す合成した後方映像データ110Cを表示させる。
A specific example of information processing in the
このようにして、車両用表示システム1は、走行状況情報取得部60が取得した走行状況に応じて、合成していない通常の後方映像データ110Bより下方を切出し、合成した後方映像データ110Cをリヤビューモニタ140の表示面に表示させる。
In this way, the
上述したように、本実施形態では、車両100の後退時、切出範囲を下方にシフトして切出した後方映像データ110B2の左右上方に右側後方映像データ120Bおよび左側後方映像データ130Bを合成し、合成した後方映像データ110Cをリヤビューモニタ140の表示面に表示させる。これにより、本実施形態は、リヤビューモニタ140の表示面で、車両100により近い位置を含んで後方を確認することができる。このように、車両用表示システム1は、適切な車両100周辺の確認を可能にすることができる。
As described above, in the present embodiment, when the
[第三実施形態]
図18ないし図21を参照しながら、本実施形態に係る車両用表示システム1Aについて説明する。図18は、第三実施形態に係る車両用表示システムの構成例を示すブロック図である。図19は、第三実施形態に係る車両用表示システムの車両用表示制御装置の制御部における処理の流れを示すフローチャートである。図20は、第三実施形態に係る車両用表示システムの後方カメラで撮影された映像データの一例を示す図である。図21は、第三実施形態に係る車両用表示システムのリヤビューモニタに表示される映像の一例を示す図である。本実施形態の車両用表示システム1Aは、検出部80と、認識辞書記憶部300とを有する点および制御部30Aにおける情報処理が第一実施形態の車両用表示システム1と異なる。
[Third embodiment]
A
認識辞書記憶部300は、例えば、車両、人物、壁、縁石、植物などを含む障害物の各方向視の形状、大きさ、色などのパターンを照合可能な認識辞書を記憶している。認識辞書記憶部300は、例えば、RAM、ROM、フラッシュメモリなどの半導体メモリ素子、または、ハードディスク、光ディスク、ネットワークを介した外部記憶装置などの記憶装置である。
The recognition
検出部80は、後方映像データ110Bの左右側方の障害物を検出する。後方映像データ110Bの左右側方は、右サイドビューモニタ150または左サイドビューモニタ160による確認範囲と重複する範囲である。例えば、後方映像データ110Bの左右側方は、後方映像データ110Bの横方向サイズにおける左右約三分の一程度である。検出部80は、後方映像データ110Bの左右側方において、障害物認識処理を行い、障害物を検出する。より詳しくは、検出部80は、後方映像データ110Bの左右側方に対して、認識辞書記憶部300が記憶している認識辞書を用いたパターンマッチングを行い、障害物の存在を検出する。検出部80は、検出した障害物を画像処理で追尾する。検出部80は、検出結果を映像合成部52Aに出力する。
The detection unit 80 detects an obstacle on the left and right sides of the
映像合成部52Aは、検出部80で障害物を検出したとき、合成した後方映像データ110Cの、障害物が検出された方向に対応する、右側後方映像データ120Bおよび左側後方映像データ130Bの少なくともどちらかを拡大表示する。より詳しくは、映像合成部52Aは、検出部80で後方映像データ110Bの左側方に障害物を検出したとき、合成した後方映像データ110Cの、左側後方映像データ130Bの合成範囲において、左側後方映像データ130Bを拡大する。映像合成部52Aは、検出部80で後方映像データ110Bの右側方に障害物を検出したとき、合成した後方映像データ110Cの、右側後方映像データ120Bの合成範囲において、右側後方映像データ120Bを拡大する。本実施形態では、障害物が検出された方向に対応する右側後方映像データ120Bおよび左側後方映像データ130Bの、車両100側の下方を基準として拡大する。映像合成部52Aは、障害物が検出された方向が拡大された、合成した後方映像データ110C2を表示制御部70に出力する。
When the detection unit 80 detects an obstacle, the
制御部30Aにおける情報処理について説明する。図19に示すフローチャートのステップS31〜ステップS33、ステップS36〜ステップS38の処理は、図9に示すフローチャートのステップS11〜ステップS13、ステップS14〜ステップS16の処理と同様である。
Information processing in the
制御部30Aは、後方映像データ110Bの左右側方に障害物を検出するか否かを判定する(ステップS34)。より詳しくは、制御部30Aは、検出部80で後方映像データ110Bの左右側方の障害物を検出したか否かを判定する。制御部30Aは、検出部80で後方映像データ110Bの左右側方に障害物を検出していないと判定した場合(ステップS34でNo)、ステップS36に進む。制御部30Aは、検出部80で後方映像データ110Bの左右側方に障害物を検出したと判定した場合(ステップS34でYes)、ステップS35に進む。
The
制御部30Aは、検出方向の右側後方映像データ120Bおよび左側後方映像データ130Bの少なくともどちらかの合成範囲において、表示される映像を拡大する(ステップS35)。より詳しくは、制御部30Aは、ステップS32で生成した、合成した後方映像データ110Cの検出方向に対応する左右いずれかの右側後方映像データ120Bまたは左側後方映像データ130Bの合成範囲において、右側後方映像データ120Bまたは左側後方映像データ130Bの表示される映像を拡大して、合成した後方映像データ110C2を生成する。表示される映像の拡大処理は、切出部51における切出範囲を狭くして切出し、狭く切出した右側後方映像データ120Bまたは左側後方映像データ130Bを拡大して表示させる。
The
図20および図21を用いて、制御部30Aにおける情報処理の具体例を説明する。車両100は、シフトポジション「リバース」が選択されている。図20に示す第一映像データ110Aには、左側方に縁石202が映っている。制御部30Aは、ステップS31において、後退トリガがあると判定する(ステップS31でYes)。そして、制御部30Aは、ステップS32において、切出部51で、図20に示す第一映像データ110Aから、後方映像データ110Bを切出させる。そして、制御部30Aは、映像合成部52Aで、後方映像データ110Bの左右上方に右側後方映像データ120Bおよび左側後方映像データ130Bを合成した後方映像データ110Cを生成させる。そして、制御部30Aは、ステップS34において、検出部80で後方映像データ110Bの左右側方に障害物を検出したと判定する(ステップS34でYes)。そして、制御部30Aは、ステップS35において、映像合成部52Aで、障害物の検出方向である左側に対応する、左側後方映像データ130Bの合成範囲において、左側後方映像データ130Bを拡大して、合成した後方映像データ110C2を生成させる。そして、制御部30Aは、表示制御部70で、リヤビューモニタ140の表示面に、図21に示す拡大された左側後方映像データ130B2を合成した後方映像データ110C2を表示させる。
A specific example of information processing in the
このようにして、車両用表示システム1Aは、後方映像データ110Bの左右側方に障害物が検出されたとき、障害物が検出された方向に対応する右側後方映像データ120Bおよび左側後方映像データ130Bが拡大された、合成した後方映像データ110C2をリヤビューモニタ140の表示面に表示させる。
Thus, when an obstacle is detected on the left and right sides of the
上述したように、本実施形態では、後方映像データ110Bの左右側方に障害物が検出されたとき、障害物が検出された方向に対応する右側後方映像データ120Bおよび左側後方映像データ130Bが拡大された、合成した後方映像データ110C2をリヤビューモニタ140の表示面に表示させる。このため、本実施形態は、リヤビューモニタ140の表示面において、車両100の左右側方にある障害物を容易に確認することができる。このように、本実施形態は、適切な車両100周辺の確認を可能にすることができる。
As described above, in this embodiment, when an obstacle is detected on the left and right sides of the
[第四実施形態]
図22を参照しながら、本実施形態に係る車両用表示システム1について説明する。図22は、第四実施形態に係る車両用表示システムの車両用表示制御装置の制御部における処理の流れを示すフローチャートである。本実施形態の車両用表示システム1は、制御部30における情報処理が第一実施形態の車両用表示システム1と異なる。
[Fourth embodiment]
The
走行状況情報取得部60は、車両100の走行状況を示す情報として、車両100の走行速度に関する情報を取得する。
The travel status
映像合成部52は、走行状況情報取得部60が、車両100が低速走行状況であることを示している情報を取得したとき、後方映像データ110Bの左右上方に右側後方映像データ120Bおよび左側後方映像データ130Bを合成する。低速走行状況とは、走行状況情報取得部60で取得した走行状況が、例えば、車両100の走行速度が所定速度未満の状態が継続していると判定される状況をいう。または、低速走行状況は、ナビゲーション情報や外部サーバなどで取得した情報に基づいて、車両100の走行路が市街地、住宅街、商店街、歩行者の多い道路であると判定される状況としてもよい。または、低速走行状況は、ナビゲーション情報や外部サーバなどで取得した情報に基づいて、車両100が、道路幅が所定幅未満である道路を走行していると判定される状況としてもよい。または、低速走行状況は、ナビゲーション情報や外部サーバなどで取得した情報に基づいて、車両100が、単車線の道路を走行していると判定される状況としてもよい。
When the driving condition
制御部30における情報処理について説明する。図22に示すフローチャートのステップS42、ステップS43、ステップS45、ステップS46の処理は、図9に示すフローチャートのステップS12、ステップS13、ステップS15、ステップS16の処理と同様である。
Information processing in the
制御部30は、低速走行状況であるか否かを判定する(ステップS41)。より詳しくは、制御部30は、走行状況情報取得部60で取得した走行状況が、車両100が低速走行状況であることを示しているか否かを判定する。制御部30は、低速走行状況ではないと判定した場合(ステップS41でNo)、ステップS41の処理を再度実行する。制御部30は、低速走行状況であると判定した場合(ステップS41でYes)、ステップS42に進む。
The
走行状況情報取得部60は、ステップS41で低速走行状況であると判定された後も継続して走行状況を取得している。より詳しくは、制御部30は、走行状況情報取得部60で走行状況の取得を継続している。
The traveling state
ステップS43において、合成した後方映像データ110Cを表示している期間において、制御部30は、走行状況情報取得部60で取得した走行状況情報に基づいて、低速走行状況の終了を判定する(ステップS44)。制御部30は、低速走行状況が終了していないと判定した場合(ステップS44でNo)、合成した後方映像データ110Cの表示を継続する。制御部30は、低速走行状況が終了したと判定された場合(ステップS44でYes)、制御部30は、後方映像データ110Bを生成し(ステップS45)、後方映像データ110Bを表示する(ステップS46)。すなわち、ステップS45およびステップS46は、ステップS41において低速走行状況であると判定される以前と同様、通常の後方映像データ110Bの表示が開始、継続される。
In step S43, during the period in which the synthesized
このようにして、車両用表示システム1は、低速走行状況であるとき、合成した後方映像データ110Cをリヤビューモニタ140の表示面に表示させる。
Thus, the
上述したように、本実施形態では、低速走行状況であるとき、合成した後方映像データ110Cをリヤビューモニタ140の表示面に表示させる。これにより、本実施形態は、低速走行状況であるとき、リヤビューモニタ140の表示面で、車両100の側後方を確認することができる。このため、本実施形態は、運転者の視線移動を抑制することができる。本実施形態は、運転者の後方及び側後方の確認に要する時間を低減することができる。このように、車両用表示システム1は、適切な車両100周辺の確認を可能にすることができる。
As described above, in this embodiment, when the vehicle is traveling at a low speed, the synthesized
低速走行時、リヤビューモニタ140は、目視による確認時間が長くなることが知られている。本実施形態によれば、低速走行状況で、運転者が車両100の路側方向の側後方を確認したいとき、リヤビューモニタ140の表示面で、車両100の後方とともに、車両100の側後方を確認することができる。このように、本実施形態は、運転者が必要とするタイミングで、運転者に適切な情報をリヤビューモニタ140の表示面を介して提供することができる。
It is known that the
[第五実施形態]
図23ないし図25を参照しながら、本実施形態に係る車両用表示システム1について説明する。図23は、第五実施形態に係る車両用表示システムの車両用表示制御装置の制御部における処理の流れを示すフローチャートである。図24は、第五実施形態に係る車両用表示システムの後方カメラで撮影された映像データの一例を示す図である。図25は、第五実施形態に係る車両用表示システムのリヤビューモニタに表示される映像の一例を示す図である。本実施形態の車両用表示システム1は、制御部30における情報処理が第一実施形態の車両用表示システム1と異なる。
[Fifth embodiment]
The
走行状況情報取得部60は、車両100の走行状況を示す情報として、車両100の走行路に関する情報を取得する。より詳しくは、走行状況情報取得部60は、ナビゲーション情報や、外部サーバなどから走行路に関する情報を取得する。本実施形態では、走行状況情報取得部60は、車両100が走行している道路の車線数を取得する。
The travel status
映像合成部52は、走行状況情報取得部60が取得した道路情報が、片側一車線の道路を示しているとき、後方映像データ110Bの左右上方に、路側方向に対応する左右いずれかの右側後方映像データ120Bまたは左側後方映像データ130Bを合成する。より詳しくは、映像合成部52は、路側方向が左側であるとき、後方映像データ110Bの左上方に左側後方映像データ130Bを合成する。映像合成部52は、路側方向が右側であるとき、後方映像データ110Bの右上方に右側後方映像データ120Bを合成する。
When the road information acquired by the traveling state
制御部30における情報処理について説明する。図23に示すフローチャートのステップS53、ステップS55、ステップS56の処理は、図9に示すフローチャートのステップS13、ステップS15、ステップS16の処理と同様である。
Information processing in the
制御部30は、走行路は片側一車線であるか否かを判定する(ステップS51)。より詳しくは、制御部30は、走行状況情報取得部60で取得した走行状況が、車両100の走行路が片側一車線の道路を示しているか否かを判定する。制御部30は、走行路が片側一車線ではないと判定した場合(ステップS51でNo)、ステップS51の処理を再度実行する。制御部30は、走行路が片側一車線であると判定した場合(ステップS51でYes)、ステップS52に進む。
The
制御部30は、路側方向に対応する右側後方映像データ120Bまたは左側後方映像データ130Bを合成した後方映像データ110Cを生成する(ステップS52)。より詳しくは、制御部30は、映像合成部52で、後方映像データ110Bの路側方向に対応する左右上方に、右側後方映像データ120Bまたは左側後方映像データ130Bを合成した後方映像データ110Cを生成する。
The
走行状況情報取得部60は、ステップS51で走行道路が片側一車線であると判定された後も継続して走行状況を取得している。より詳しくは、制御部30は、走行状況情報取得部60で走行状況の取得を継続している。
The traveling state
ステップS53において、合成した後方映像データ110Cを表示している期間において、制御部30は、走行状況情報取得部60で取得した走行状況情報に基づいて、片側一車線の道路の終了を判定する(ステップS54)。制御部30は、片側一車線の道路が終了していないと判定した場合(ステップS54でNo)、合成した後方映像データ110Cの表示を継続する。制御部30は、片側一車線の道路が終了したと判定された場合(ステップS54でYes)、制御部30は、後方映像データ110Bを生成し(ステップS55)、後方映像データ110Bを表示する(ステップS56)。すなわち、ステップS55およびステップS56は、ステップS51において走行道路が片側一車線であると判定される以前と同様、通常の後方映像データ110Bの表示が開始、継続される。
In step S53, during the period in which the synthesized
図24および図25を用いて、制御部30における情報処理の具体例を説明する。図24に示す第一映像データ110Aは、車両100が片側一車線の道路を走行しているときの映像である。制御部30は、ステップS51において、走行路が片側一車線であると判定する(ステップS51でYes)。そして、制御部30は、ステップS52において、後方映像データ110Bの路側方向である左側に対応する左上方に、左側後方映像データ130Bを合成した後方映像データ110Cを生成する。そして、制御部30は、リヤビューモニタ140の表示面に、図25に示す左側後方映像データ130Bを合成した後方映像データ110Cを表示させる。
A specific example of information processing in the
このようにして、車両用表示システム1は、片側一車線の道路を走行しているとき、後方映像データ110Bの左右上方に、路側方向に対応する左右いずれかの右側後方映像データ120Bまたは左側後方映像データ130Bを合成する。
In this way, when the
上述したように、本実施形態では、片側一車線の道路を走行しているとき、後方映像データ110Bの左右上方に、路側方向に対応する左右いずれかの右側後方映像データ120Bまたは左側後方映像データ130Bを合成した後方映像データ110Cをリヤビューモニタ140の表示面に表示させる。これにより、本実施形態は、片側一車線の道路を走行しているとき、リヤビューモニタ140の表示面で、車両100の後方とともに、車両100の路側方向の側後方を確認することができる。このため、本実施形態は、運転者の視線移動を抑制することができる。本実施形態は、運転者の後方及び側後方の確認に要する時間を低減することができる。このように、車両用表示システム1は、適切な車両100周辺の確認を可能にすることができる。
As described above, in the present embodiment, when traveling on a one-lane road, either the right
[第六実施形態]
図26ないし図28を参照しながら、本実施形態に係る車両用表示システム1について説明する。図26は、第六実施形態に係る車両用表示システムの車両用表示制御装置の制御部における処理の流れを示すフローチャートである。図27は、第六実施形態に係る車両用表示システムのリヤビューモニタに表示される映像の一例を示す図である。図28は、第六実施形態に係る車両用表示システムのリヤビューモニタに表示される映像の他の例を示す図である。本実施形態の車両用表示システム1は、制御部30における情報処理が第一実施形態の車両用表示システム1と異なる。
[Sixth embodiment]
The
走行状況情報取得部60は、車両100の走行状況を示す情報として、車両100の走行路に関する情報を取得する。より詳しくは、走行状況情報取得部60は、例えば、ナビゲーション情報や、外部サーバなどで取得した情報に基づいて、車両100が低速走行を行う道路を走行しているかを判定可能な情報を取得する。低速走行を行う道路とは、走行路が市街地、住宅街、商店街、歩行者の多い道路をいう。または、低速走行を行う道路とは、道路幅が所定幅未満の道路としてもよい。または、単車線の道路としてもよい。または、片側一車線の道路であると判定される道路としてもよい。
The travel status
映像合成部52は、走行状況情報取得部60が、車両100が低速走行を行う道路を走行中であることを示している情報を取得したとき、後方映像データ110Bの左右上方に右側後方映像データ120Bおよび左側後方映像データ130Bを合成する。さらに、映像合成部52は、走行状況情報取得部60が取得した道路情報が、片側一車線の道路を示しているとき、路側方向に対応する左右いずれかの右側後方映像データ120Bまたは左側後方映像データ130Bを拡大して合成する。より詳しくは、映像合成部52は、路側方向が左側であるとき、後方映像データ110Bの左上方に左側後方映像データ130Bを合成する。映像合成部52は、路側方向が右側であるとき、後方映像データ110Bの右上方に右側後方映像データ120Bを合成する。
When the driving condition
制御部30における情報処理について説明する。図26に示すフローチャートのステップS62、ステップS63、ステップS68、ステップS69の処理は、図9に示すフローチャートのステップS12、ステップS13、ステップS15、ステップS16の処理と同様である。図26に示すフローチャートのステップS64、ステップS66の処理は、図23に示すフローチャートのステップS51、ステップS54の処理と同様である。
Information processing in the
制御部30は、低速走行を行う道路を走行中であるか否かを判定する(ステップS61)。より詳しくは、制御部30は、走行状況情報取得部60で取得した走行状況が、車両100が低速走行を行う道路を走行中であることを示しているか否かを判定する。制御部30は、低速走行を行う道路を走行中ではないと判定した場合(ステップS61でNo)、ステップS61の処理を再度実行する。制御部30は、低速走行を行う道路を走行中であると判定した場合(ステップS61でYes)、ステップS62に進む。
The
ステップS64において、走行道路が片側一車線であると判定された場合、制御部30は、路側方向に対応する左右いずれかの右側後方映像データ120Bまたは左側後方映像データ130Bにおいて、表示される映像を拡大する(ステップS65)。より詳しくは、制御部30は、映像合成部52で、ステップS62で生成した、合成した後方映像データ110Cの路側方向に対応する左右いずれかの右側後方映像データ120Bまたは左側後方映像データ130Bにおいて、右側後方映像データ120Bまたは左側後方映像データ130Bの表示される映像を拡大して、合成した後方映像データ110C2を生成させる。表示される映像の拡大処理は、切出部51における切出範囲を狭くして切出し、狭く切出した右側後方映像データ120Bまたは左側後方映像データ130Bを拡大して表示させる。
If it is determined in step S64 that the road is a single lane on one side, the
制御部30における情報処理の具体例を説明する。制御部30は、ステップS61において、低速走行を行う道路を走行中ではないと判定した場合(ステップS61でNo)、通常の後方映像データ110Bの生成と表示を継続する。制御部30は、ステップS61において、低速走行を行う道路を走行中であると判定した場合(ステップS61でYes)、ステップS62において、合成した後方映像データ110Cを生成する。より詳しくは、制御部30は、図27に示す、後方映像データ110Bの左右上方に、右側後方映像データ120Bおよび左側後方映像データ130Bを合成した後方映像データ110Cを生成する。さらに、制御部30は、ステップS64において、走行路が片側一車線であると判定した場合(ステップS64でYes)、ステップS65において、路側方向に対応する左右いずれかの右側後方映像データ120Bまたは左側後方映像データ130Bにおいて、表示される映像を拡大した、合成した後方映像データ110C2を生成する。より詳しくは、制御部30は、図28に示す、路側方向である左側に対応する左側後方映像データ130Bにおいて、表示される映像を拡大した左側後方映像データ130B2を含む後方映像データ110C2を生成する。そして、制御部30は、リヤビューモニタ140の表示面に、通常の後方映像データ110Bまたは合成した後方映像データ110Cまたは合成した後方映像データ110C2を表示させる。
A specific example of information processing in the
このようにして、車両用表示システム1は、車両100が低速走行を行う道路を走行中であるとき、後方映像データ110Bの左右上方に右側後方映像データ120Bおよび左側後方映像データ130Bを合成する。さらに、車両用表示システム1は、走行路が片側一車線であるとき、路側方向に対応する左右いずれかの右側後方映像データ120Bまたは左側後方映像データ130Bを拡大する。
Thus, the
上述したように、本実施形態では、車両100が低速走行を行う道路を走行中であるとき、リヤビューモニタ140の表示面で、車両100の後方とともに、車両100の路側方向の側後方を確認することができる。さらに、走行路が片側一車線であるとき、路側方向に対応する右側後方映像データ120Bおよび左側後方映像データ130Bが拡大された、合成した後方映像データ110C2をリヤビューモニタ140の表示面に表示させる。このため、本実施形態は、走行路が片側一車線であるとき、リヤビューモニタ140の表示面において、車両100の左右側方にある障害物を容易に確認することができる。本実施形態は、運転者の後方及び側後方の確認に要する時間を低減することができる。このように、車両用表示システム1は、適切な車両100周辺の確認を可能にすることができる。
As described above, in the present embodiment, when the
[第七実施形態]
図29を参照しながら、本実施形態に係る車両用表示システム1について説明する。図29は、第七実施形態に係る車両用表示システムの車両用表示制御装置の制御部における処理の流れを示すフローチャートである。本実施形態の車両用表示システム1は、制御部30における情報処理が第一実施形態の車両用表示システム1と異なる。
[Seventh embodiment]
The
走行状況情報取得部60は、車両100の走行状況を示す情報として、車両100の旋回方向(左右方向)情報を取得する。旋回方向情報とは、車両100の旋回方向への移動を推定する情報である。具体的に、旋回方向情報は、車両100の周辺の地図情報と車両100の現在地情報と車両100の方向指示器操作情報と車両100のギア操作情報と車両100のステアリング操作情報と車両100の角速度との少なくともいずれか一つの情報などである。
The traveling state
車両100の旋回方向の変化とは、車両100が走行中の道路が延びる方向(以下、「走行路方向」という)に対して、逸れる方向の変化である。旋回方向の変化は、車両100の前後方向の前側に向かって左右方向の変化である。例えば、右左折時や車線変更時に、車両100は、旋回方向の変化を生じる。車両100の旋回方向の変化には、屈曲またはカーブしている道路に沿った車両100の方向の変化は含まない。
The change in the turning direction of the
映像合成部52は、走行状況情報取得部60が取得した旋回情報が、旋回方向の変化を示しているとき、変化する旋回方向に対応する左右いずれかの右側後方映像データ120Bまたは左側後方映像データ130Bを合成する。より詳しくは、映像合成部52は、旋回方向が左方向であるとき、後方映像データ110Bの左上方に左側後方映像データ130Bを合成する。映像合成部52は、旋回方向が右方向であるとき、後方映像データ110Bの右上方に右側後方映像データ120Bを合成する。映像合成部52は、例えば、走行路方向とのズレが15°以上となったら、旋回方向が変化したと判定するようにしてもよい。これは、走行時の多少のブレやステアリングホイールの遊びを、車両100の旋回方向の変化として判定しないためである。
When the turning information acquired by the traveling state
制御部30における情報処理について説明する。図29に示すフローチャートのステップS73、ステップS75、ステップS76の処理は、図9に示すフローチャートのステップS13、ステップS15、ステップS16の処理と同様である。
Information processing in the
制御部30は、旋回方向が変化したか否かを判定する(ステップS71)。より詳しくは、制御部30は、走行状況情報取得部60で取得した走行状況が、旋回方向の変化を示しているか否かを判定する。制御部30は、旋回方向が変化していないと判定した場合(ステップS71でNo)、ステップS71の処理を再度実行する。制御部30は、旋回方向が変化したと判定した場合(ステップS71でYes)、ステップS72に進む。
The
制御部30は、旋回方向に対応する右側後方映像データ120Bまたは左側後方映像データ130Bを合成した後方映像データ110Cを生成する(ステップS72)。より詳しくは、制御部30は、映像合成部52で、後方映像データ110Bの旋回方向に対応する左右上方に、右側後方映像データ120Bまたは左側後方映像データ130Bを合成した後方映像データ110Cを生成させる。
The
走行状況情報取得部60は、ステップS71で旋回方向が変化したと判定された後も継続して走行状況を取得している。より詳しくは、制御部30は、走行状況情報取得部60で走行状況の取得を継続している。
The traveling state
ステップS73において、合成した後方映像データ110Cを表示している期間において、制御部30は、走行状況情報取得部60で取得した走行状況情報に基づいて、旋回方向の変化の終了を判定する(ステップS74)。制御部30は、旋回方向の変化が終了していないと判定した場合(ステップS74でNo)、合成した後方映像データ110Cの表示を継続する。制御部30は、旋回方向の変化が終了したと判定された場合(ステップS74でYes)、制御部30は、後方映像データ110Bを生成し(ステップS75)、後方映像データ110Bを表示する(ステップS76)。すなわち、ステップS75およびステップS76は、ステップS71において旋回方向が変化したと判定される以前と同様、通常の後方映像データ110Bの表示が開始、継続される。
In step S73, during the period in which the synthesized
このようにして、車両用表示システム1は、旋回方向が変化したとき、後方映像データ110Bの左右上方に、旋回方向に対応する左右いずれかの右側後方映像データ120Bまたは左側後方映像データ130Bを合成する。
In this way, when the turning direction changes, the
上述したように、本実施形態では、旋回方向が変化しているとき、後方映像データ110Bの左右上方に、旋回方向に対応する左右いずれかの右側後方映像データ120Bまたは左側後方映像データ130Bを合成した後方映像データ110Cをリヤビューモニタ140の表示面に表示させる。これにより、本実施形態は、旋回方向が変化しているとき、リヤビューモニタ140の表示面で、車両100の後方とともに、車両100の路側方向の側後方を確認することができる。このため、本実施形態は、運転者の視線移動を抑制することができる。本実施形態は、運転者の後方及び側後方の確認に要する時間を低減することができる。このように、車両用表示システム1は、適切な車両100周辺の確認を可能にすることができる。
As described above, in the present embodiment, when the turning direction is changing, either the right
図示した車両用表示システム1の各構成要素は、機能概念的なものであり、必ずしも物理的に図示の如く構成されていなくてもよい。すなわち、各装置の具体的形態は、図示のものに限られず、各装置の処理負担や使用状況などに応じて、その全部または一部を任意の単位で機能的または物理的に分散または統合してもよい。
Each component of the illustrated
車両用表示システム1の構成は、例えば、ソフトウェアとして、メモリにロードされたプログラムなどによって実現される。上記実施形態では、これらのハードウェアまたはソフトウェアの連携によって実現される機能ブロックとして説明した。すなわち、これらの機能ブロックについては、ハードウェアのみ、ソフトウェアのみ、または、それらの組み合わせによって種々の形で実現できる。
The configuration of the
上記に記載した構成要素には、当業者が容易に想定できるもの、実質的に同一のものを含む。さらに、上記に記載した構成は適宜組み合わせが可能である。また、本発明の要旨を逸脱しない範囲において構成の種々の省略、置換または変更が可能である。 The components described above include those that can be easily assumed by those skilled in the art and those that are substantially the same. Furthermore, the structures described above can be appropriately combined. In addition, various omissions, substitutions, or changes in the configuration can be made without departing from the scope of the present invention.
制御部30は、例えば、図9に示すフローチャートのステップS11における判定条件が、一定時間継続されたら、ステップS12において合成した後方映像データ110Cを生成するものとしてもよい。これにより、車両用表示システム1は、不用意にリヤビューモニタ140に表示する映像が切り替わることを抑制することができる。
For example, when the determination condition in step S11 of the flowchart illustrated in FIG. 9 is continued for a predetermined time, the
制御部30は、合成した後方映像データ110Cにおいて、右側後方映像データ120Bおよび左側後方映像データ130Bに対応する範囲を、所定透明度の半透明で着色して表示してもよい。これにより、車両用表示システム1は、リヤビューモニタ140の表示が右側後方映像データ120Bおよび左側後方映像データ130Bを含んでいることを容易に確認することができる。
The
第一実施形態および第三実施形態ないし第七実施形態では、切出部51で、第一映像データ110Aから第一映像データ110Aの一部を切出すものとしたが、これに限定されない。第一映像データ110Aを切出さずに全範囲を後方映像データ110Bとしてもよい。
In the first embodiment and the third to seventh embodiments, the cutting
切出部51で、第二映像データから、右サイドビューモニタ150および左サイドビューモニタ160に表示する右側後方映像データ120Bおよび左側後方映像データ130Bを切出すものとしたが、これに限定されない。第二映像データを切出さずに全範囲を右側後方映像データ120Bおよび左側後方映像データ130Bとしてもよい。
The cutting
右サイドビューモニタ150および左サイドビューモニタ160を備えるものとしたが、従来の光学式の右サイドミラーおよび左サイドミラーを備えていてもよい。
Although the right
第三実施形態では、検出部80は、後方映像データ110Bに対して、認識辞書記憶部300が記憶している認識辞書を用いたパターンマッチングを行い、障害物の存在を検出するものとしたが、障害物の検出方法はこれに限定されない。検出部80は、後方映像データ110Bに対して、路面認識処理で車両100の後方の路面を認識し、検出した路面より上方に位置するものを障害物として認識してもよい。
In the third embodiment, the detection unit 80 performs pattern matching using the recognition dictionary stored in the recognition
第五実施形態および第六実施形態では、走行状況情報取得部60が取得した道路情報に基づいて、片側一車線の道路を示しているか否かを判定したが、これに限定されない。映像合成部52は、第一映像データ110Aに対して車線認識処理を行って、走行路が片側一車線であるか否かを判定してもよい。
In the fifth embodiment and the sixth embodiment, it is determined whether or not a single-lane road is indicated based on the road information acquired by the traveling state
後方映像データ110Bの左右上方に合成する右側後方映像データ120Bおよび左側後方映像データ130Bは、右サイドビューモニタ150および左サイドビューモニタ160に表示する右側後方映像データおよび左側後方映像データ(以下、「サイドビューモニタ映像」という)とは異なる切出範囲としてもよい。例えば、右側後方映像データ120Bおよび左側後方映像データ130Bは、サイドビューモニタ映像と同じ範囲を切出してもよい。または、例えば、右側後方映像データ120Bおよび左側後方映像データ130Bは、サイドビューモニタ映像よりも広い範囲を切出してもよい。または、例えば、右側後方映像データ120Bおよび左側後方映像データ130Bは、サイドビューモニタ映像よりも狭い範囲を切出してもよい。この場合、後方映像データ110Bの左右上方に合成された右側後方映像データ120Bおよび左側後方映像データ130Bは、サイドビューモニタ映像より狭い範囲が拡大され表示されていてもよい。さらに、後方映像データ110Bの左右上方に合成された右側後方映像データ120Bおよび左側後方映像データ130Bは、後方映像データ110Bと被撮影物の大きさが同じになるようにしてもよい。
The right
切出部51による切出範囲や、右側後方映像データ120Bまたは左側後方映像データ130Bのリヤビューモニタ140の表示面における大きさは、例えば、運転者が停車中に調節することができるようにしてもよい。その際に、例えば、リヤビューモニタ140の表示面において2本の指の間隔を縮めたり広げたりする動作で、切出範囲や大きさを所望の大きさに設定できるようにしてもよい。また、例えば、リヤビューモニタ140の表示面をタッチするごとに、切出範囲や大きさが、段階的に変化するようにしてもよい。
For example, the size of the clipping range by the
第二実施形態において、切出範囲を下方にシフトして後方映像データ110B2を切出す際に、切出範囲を下方にシフトして右側後方映像データ120Bおよび左側後方映像データ130Bを切出すようにしてもよい。または、切出範囲を下方にシフトして後方映像データ110B2を切出す際に、車両100の旋回方向に対応する左右いずれかの右側後方映像データ120Bまたは左側後方映像データ130Bについて、切出範囲を下方にシフトしてもよい。
In the second embodiment, when the cutout range is shifted downward and the rear video data 110B2 is cut out, the cutout range is shifted downward and the right
1 車両用表示システム
10 車両用表示制御装置
30 制御部
40 映像データ取得部
41 側後方映像データ取得部
42 後方映像データ取得部
50 映像処理部
51 切出部
52 映像合成部
60 走行状況情報取得部
70 表示制御部
100 車両
110 後方カメラ
120 右側後方カメラ(側後方カメラ)
130 左側後方カメラ(側後方カメラ)
140 リヤビューモニタ(表示装置)
150 右サイドビューモニタ(側後方確認装置)
160 左サイドビューモニタ(側後方確認装置)
DESCRIPTION OF
130 Left rear camera (side rear camera)
140 Rear view monitor (display device)
150 Right side view monitor (side rear confirmation device)
160 Left side view monitor (side rear confirmation device)
Claims (14)
前記車両の左右側方に前記車両の後方を向くように配置され、前記車両の左右側後方を撮影する側後方カメラからの側後方映像データを取得する側後方映像データ取得部と、
前記車両の走行状況を示す情報を取得する走行状況情報取得部と、
前記走行状況情報取得部が取得した走行状況に応じて、前記後方映像データの左右上方に前記側後方映像データを合成する映像合成部と、
前記映像合成部が合成した後方映像データを、前記車両の後方映像を表示する表示装置に表示させる表示制御部と、
を備えることを特徴とする車両用表示制御装置。 A rear video data acquisition unit that is arranged to face the rear of the vehicle and acquires rear video data from a rear camera that captures the rear of the vehicle;
A side rear video data acquisition unit arranged to face the rear of the vehicle on the left and right sides of the vehicle, and for acquiring side rear video data from a side rear camera that captures the left and right sides of the vehicle;
A travel status information acquisition unit for acquiring information indicating the travel status of the vehicle;
In accordance with the driving situation acquired by the driving situation information acquisition unit, a video composition unit that synthesizes the side rear video data on the left and right upper sides of the rear video data;
A display control unit that displays the rear video data synthesized by the video synthesis unit on a display device that displays the rear video of the vehicle;
A vehicle display control device comprising:
請求項1に記載の車両用表示制御装置。 The video synthesizing unit synthesizes the side rear video data on the upper left and right sides of the rear video data so that the side rear video data is about an upper half of the vertical size of the display surface of the display device. ,
The vehicle display control apparatus according to claim 1.
請求項1または2に記載の車両用表示制御装置。 The video synthesizing unit synthesizes the side rear video data on the left and right upper sides of the rear video data so that the side rear video data is about one third of the left and right in the horizontal size of the display surface of the display device. To
The vehicle display control device according to claim 1.
前記映像合成部は、前記走行状況情報取得部が、前記車両が後退することを示す情報を取得したとき、前記後方映像データの左右上方に前記側後方映像データを合成する、
請求項1から3のいずれか1項に記載の車両用表示制御装置。 The traveling state information acquisition unit acquires information indicating that the vehicle moves backward,
The video composition unit synthesizes the side rear video data on the left and right upper sides of the rear video data when the traveling state information acquisition unit acquires information indicating that the vehicle moves backward.
The vehicle display control device according to any one of claims 1 to 3.
前記切出部は、前記車両用表示制御装置が、合成した後方映像データを前記表示装置に表示させるとき、合成していない前記後方映像データを表示させるときより下方を切出す、
請求項1から4のいずれか1項に記載の車両用表示制御装置。 A cutting section that cuts out a display range to be displayed on the display device from the rear video data,
The cut-out unit cuts out the lower side than when the vehicle display control device displays the synthesized rear video data on the display device, when displaying the rear video data not synthesized,
The vehicle display control apparatus according to any one of claims 1 to 4.
前記映像合成部は、前記走行状況情報取得部が、前記車両が低速走行状況であることを示している情報を取得したとき、前記後方映像データの左右上方に前記側後方映像データを合成する、
請求項1から3のいずれか1項に記載の車両用表示制御装置。 The travel status information acquisition unit acquires information on the travel speed of the vehicle as information indicating the travel status of the vehicle,
The video composition unit, when the traveling situation information acquisition unit obtains information indicating that the vehicle is in a low-speed traveling situation, synthesizes the side rear video data on the left and right upper side of the rear video data,
The vehicle display control device according to any one of claims 1 to 3.
前記映像合成部は、前記走行状況情報取得部が取得した走行路に関する情報が、片側一車線の道路を示しているとき、前記後方映像データの左右上方に、路側方向に対応する左右どちらかの前記側後方映像データを合成する、
請求項1から3のいずれか1項に記載の車両用表示制御装置。 The travel status information acquisition unit acquires information on the travel path of the vehicle as information indicating the travel status of the vehicle,
When the information about the travel road acquired by the travel condition information acquisition unit indicates a one-lane road, the video composition unit is located on either the left or right side of the rear video data, corresponding to the roadside direction. Combining the side rear video data;
The vehicle display control device according to any one of claims 1 to 3.
前記映像合成部は、前記走行状況情報取得部が取得した走行路に関する情報が、低速走行を行う道路であることを示しているとき、前記後方映像データの左右上方に前記側後方映像データを合成する、
請求項1から3のいずれか1項に記載の車両用表示制御装置。 The travel status information acquisition unit acquires information on the travel path of the vehicle as information indicating the travel status of the vehicle,
The video composition unit synthesizes the side rear video data on the left and right upper sides of the rear video data when the information on the travel route acquired by the travel condition information acquisition unit indicates a road that runs at a low speed. To
The vehicle display control device according to any one of claims 1 to 3.
請求項8に記載の車両用表示制御装置。 When the information about the travel road acquired by the travel condition information acquisition unit indicates a one-lane road, the video composition unit is located on either the left or right side of the rear video data, corresponding to the roadside direction. Enlarging and compositing the side rear video data,
The vehicle display control apparatus according to claim 8.
前記映像合成部は、前記走行状況情報取得部が取得した旋回方向情報が旋回方向の変化を示しているとき、前記後方映像データの左右上方に、旋回方向に対応する左右どちらかの前記側後方映像データを合成する、
請求項1から3のいずれか1項に記載の車両用表示制御装置。 The travel status information acquisition unit acquires the turning direction information of the vehicle as information indicating the travel status of the vehicle,
When the turning direction information acquired by the traveling state information acquisition unit indicates a change in the turning direction, the video composition unit is located on either the left or right side corresponding to the turning direction at the upper left or right of the rear video data. Synthesize video data,
The vehicle display control device according to any one of claims 1 to 3.
前記映像合成部は、前記検出部で前記後方映像データの左右側方に障害物を検出したとき、前記後方映像データの左右上方に、前記障害物が検出された方向に対応する左右少なくともどちらかの前記側後方映像データを拡大して合成する、
請求項4または7または10に記載の車両用表示制御装置。 A detection unit for detecting obstacles on the left and right sides of the rear video data,
When the detection unit detects an obstacle on the left and right sides of the rear video data, the video synthesis unit has at least one of right and left corresponding to the direction in which the obstacle is detected. Enlarge and synthesize the side rear video data of
The vehicle display control device according to claim 4, 7 or 10.
少なくとも前記表示装置、前記後方カメラ、前記側後方カメラのうち少なくともいずれかと、を備える車両用表示システム。 The vehicle display control device according to any one of claims 1 to 11,
A vehicle display system comprising at least one of the display device, the rear camera, and the side rear camera.
前記車両の左右側方に前記車両の後方を向くように配置され、前記車両の左右側後方を撮影する側後方カメラからの側後方映像データを取得する側後方映像データ取得ステップと、
前記車両の走行状況を示す情報を取得する走行状況情報取得ステップと、
前記走行状況情報取得ステップが取得した走行状況に応じて、前記後方映像データの左右上方に前記側後方映像データを合成する映像合成ステップと、
前記映像合成ステップが合成した後方映像データを、前記車両の後方映像を表示する表示装置に表示させる表示制御ステップと、
を含む車両用表示制御方法。 A rear video data acquisition step that is arranged to face the rear of the vehicle and acquires rear video data from a rear camera that captures the rear of the vehicle;
A side rear image data acquisition step for acquiring side rear image data from a side rear camera that is disposed on the left and right sides of the vehicle so as to face the rear of the vehicle, and captures the left and right sides of the vehicle,
A driving condition information acquisition step of acquiring information indicating the driving condition of the vehicle;
In accordance with the driving situation acquired by the driving situation information acquisition step, a video synthesis step of synthesizing the side rear video data on the left and right upper sides of the rear video data;
A display control step for displaying the rear video data synthesized by the video synthesis step on a display device for displaying the rear video of the vehicle;
A vehicle display control method including:
前記車両の左右側方に前記車両の後方を向くように配置され、前記車両の左右側後方を撮影する側後方カメラからの側後方映像データを取得する側後方映像データ取得ステップと、
前記車両の走行状況を示す情報を取得する走行状況情報取得ステップと、
前記走行状況情報取得ステップが取得した走行状況に応じて、前記後方映像データの左右上方に前記側後方映像データを合成する映像合成ステップと、
前記映像合成ステップが合成した後方映像データを、前記車両の後方映像を表示する表示装置に表示させる表示制御ステップと、
を車両用表示制御装置として動作するコンピュータに実行させるためのプログラム。 A rear video data acquisition step that is arranged to face the rear of the vehicle and acquires rear video data from a rear camera that captures the rear of the vehicle;
A side rear image data acquisition step for acquiring side rear image data from a side rear camera that is disposed on the left and right sides of the vehicle so as to face the rear of the vehicle, and captures the left and right sides of the vehicle,
A driving condition information acquisition step of acquiring information indicating the driving condition of the vehicle;
In accordance with the driving situation acquired by the driving situation information acquisition step, a video synthesis step of synthesizing the side rear video data on the left and right upper sides of the rear video data
A display control step for displaying the rear video data synthesized by the video synthesis step on a display device for displaying the rear video of the vehicle;
For causing a computer that operates as a display control device for a vehicle to execute.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016146001A JP2018019155A (en) | 2016-07-26 | 2016-07-26 | Display controller for vehicle, display system for vehicle, display control method for vehicle and program |
| PCT/JP2017/015014 WO2018020751A1 (en) | 2016-07-26 | 2017-04-12 | Display control device for vehicle, display system for vehicle, display control method for vehicle, and program |
| US16/170,164 US10730434B2 (en) | 2016-07-26 | 2018-10-25 | Vehicular display control device, vehicular display system, vehicular display control method, and non-transitory storage medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016146001A JP2018019155A (en) | 2016-07-26 | 2016-07-26 | Display controller for vehicle, display system for vehicle, display control method for vehicle and program |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2018019155A true JP2018019155A (en) | 2018-02-01 |
| JP2018019155A5 JP2018019155A5 (en) | 2018-12-06 |
Family
ID=61075271
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016146001A Pending JP2018019155A (en) | 2016-07-26 | 2016-07-26 | Display controller for vehicle, display system for vehicle, display control method for vehicle and program |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2018019155A (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110386066A (en) * | 2018-04-16 | 2019-10-29 | Jvc 建伍株式会社 | Vehicle display control unit and method, vehicle display system and storage medium |
| CN113965666A (en) * | 2019-02-13 | 2022-01-21 | Jvc建伍株式会社 | Vehicle video control device, vehicle video system, video control method, and program |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005346648A (en) * | 2004-06-07 | 2005-12-15 | Denso Corp | View assistance system and program |
| JP2009029203A (en) * | 2007-07-25 | 2009-02-12 | Honda Motor Co Ltd | Driving support device |
| JP2010163104A (en) * | 2009-01-16 | 2010-07-29 | Denso Corp | Vehicular display apparatus and vehicular peripheral visual field display system having the same |
| JP2013005232A (en) * | 2011-06-16 | 2013-01-07 | Aisin Seiki Co Ltd | Vehicle periphery monitoring device |
| JP2015210592A (en) * | 2014-04-24 | 2015-11-24 | 日立オートモティブシステムズ株式会社 | Outside world recognition apparatus |
| JP2016097896A (en) * | 2014-11-25 | 2016-05-30 | アイシン精機株式会社 | Image display control device |
-
2016
- 2016-07-26 JP JP2016146001A patent/JP2018019155A/en active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005346648A (en) * | 2004-06-07 | 2005-12-15 | Denso Corp | View assistance system and program |
| JP2009029203A (en) * | 2007-07-25 | 2009-02-12 | Honda Motor Co Ltd | Driving support device |
| JP2010163104A (en) * | 2009-01-16 | 2010-07-29 | Denso Corp | Vehicular display apparatus and vehicular peripheral visual field display system having the same |
| JP2013005232A (en) * | 2011-06-16 | 2013-01-07 | Aisin Seiki Co Ltd | Vehicle periphery monitoring device |
| JP2015210592A (en) * | 2014-04-24 | 2015-11-24 | 日立オートモティブシステムズ株式会社 | Outside world recognition apparatus |
| JP2016097896A (en) * | 2014-11-25 | 2016-05-30 | アイシン精機株式会社 | Image display control device |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN110386066A (en) * | 2018-04-16 | 2019-10-29 | Jvc 建伍株式会社 | Vehicle display control unit and method, vehicle display system and storage medium |
| CN110386066B (en) * | 2018-04-16 | 2023-10-27 | Jvc 建伍株式会社 | Vehicle display control device and method, vehicle display system, and storage medium |
| CN113965666A (en) * | 2019-02-13 | 2022-01-21 | Jvc建伍株式会社 | Vehicle video control device, vehicle video system, video control method, and program |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3367366B1 (en) | Display control method and display control device | |
| WO2018012299A1 (en) | Image generation device, image generation method, and program | |
| JP6303428B2 (en) | Vehicle information projection system | |
| KR102000929B1 (en) | Mirror replacement system for a vehicle | |
| JP5669791B2 (en) | Moving object peripheral image display device | |
| JP6443716B2 (en) | Image display device, image display method, and image display control program | |
| KR20200016958A (en) | Parking Assistance Method and Parking Assistance Device | |
| US20190066382A1 (en) | Driving support device, driving support method, information providing device and information providing method | |
| JP7440235B2 (en) | Display control device and display control method | |
| JP2019186853A (en) | Vehicle display control device, vehicle display system, vehicle display control method, and program | |
| CN115700196A (en) | Display control device for vehicle, display control method for vehicle, and display device for vehicle | |
| JP2012153256A (en) | Image processing apparatus | |
| JP2019040634A (en) | Image display device, image display method and image display control program | |
| US10730434B2 (en) | Vehicular display control device, vehicular display system, vehicular display control method, and non-transitory storage medium | |
| WO2022168540A1 (en) | Display control device and display control program | |
| CN113165510A (en) | Display control apparatus, method and computer program | |
| JP2018092290A (en) | Vehicle display device | |
| JP2018019155A (en) | Display controller for vehicle, display system for vehicle, display control method for vehicle and program | |
| JP2024114765A (en) | Vehicle display device, vehicle display system, vehicle display method and program | |
| JP6728727B2 (en) | Vehicle display device | |
| JP2002225628A (en) | Display device for vehicle | |
| JP2018019176A (en) | Display controller for vehicle, display system for vehicle, display control method for vehicle and program | |
| JP6610376B2 (en) | Display device | |
| JP7434894B2 (en) | Vehicle display device | |
| US20230132456A1 (en) | Image processing device, mobile object, image processing method, and storage medium |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20181023 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190307 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200331 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20201006 |