JP2017536522A - 推進システム - Google Patents
推進システム Download PDFInfo
- Publication number
- JP2017536522A JP2017536522A JP2017536223A JP2017536223A JP2017536522A JP 2017536522 A JP2017536522 A JP 2017536522A JP 2017536223 A JP2017536223 A JP 2017536223A JP 2017536223 A JP2017536223 A JP 2017536223A JP 2017536522 A JP2017536522 A JP 2017536522A
- Authority
- JP
- Japan
- Prior art keywords
- mass
- thrust mass
- thrust
- capture
- impact
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images







Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F03—MACHINES OR ENGINES FOR LIQUIDS; WIND, SPRING, OR WEIGHT MOTORS; PRODUCING MECHANICAL POWER OR A REACTIVE PROPULSIVE THRUST, NOT OTHERWISE PROVIDED FOR
- F03G—SPRING, WEIGHT, INERTIA OR LIKE MOTORS; MECHANICAL-POWER PRODUCING DEVICES OR MECHANISMS, NOT OTHERWISE PROVIDED FOR OR USING ENERGY SOURCES NOT OTHERWISE PROVIDED FOR
- F03G7/00—Mechanical-power-producing mechanisms, not otherwise provided for or using energy sources not otherwise provided for
- F03G7/10—Alleged perpetua mobilia
- F03G7/125—Alleged perpetua mobilia creating a thrust by violating the principle of momentum conservation
Landscapes
- Engineering & Computer Science (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Transmission Devices (AREA)
- Excavating Of Shafts Or Tunnels (AREA)
- Feeding Of Articles To Conveyors (AREA)
- Specific Conveyance Elements (AREA)
- Press Drives And Press Lines (AREA)
Abstract
Description
したがって、燃料の非効率性、過剰なエネルギー消費、および作動可能な部品の摩擦摩耗の低減という課題を解決する高効率の装置が必要とされていた。これに関して、本発明はこの必要性を実質的に満たす。
本発明のさらなる課題は、輸送産業におけるエネルギー効率の向上から生じる環境上の利益を提供することにある。
本発明のさらなる課題は、誘起された線形推力ベクトルの方向および大きさを制御するための装置のオペレータ制御にある。
同様の参照符号は、図面のいくつかの図を通して同様の部分を指す。
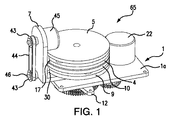
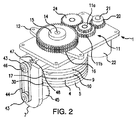
ここで図面、特に図1および図2を参照して、本発明の原理および概念を具体化し、参照符号65で全体を示すスタードライブ推進システムを説明する。
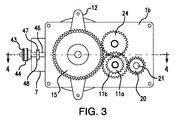
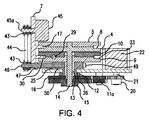
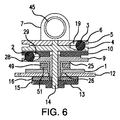
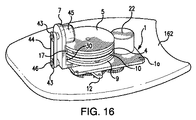
図1および図2を参照して、衝撃駆動板1は機構搭載基板である。モータ22は、衝撃駆動板1に接続され、モータ駆動軸体21を介して回転動力を供給し(図3および図4参照)、モータ駆動ギア20の時計回りの回転をもたらす。モータ駆動ギア20は、タンデム中間駆動ギア11と噛み合っている。タンデム中間駆動ギア11は、上側ギア部11aと下側ギア部11bとを有する単一部品である。タンデム中間駆動ギア11の上側ギア部11aは、タンデム反転ギア24と噛合している。タンデム中間駆動ギア11の下側ギア部11bは、時計回りの捕捉板ギア16と噛合している。タンデム反転ギア24は、反時計回りの捕捉板ギア15と噛合している。反時計回りの捕捉板ギア15は、いずれも単体であるギアとハブとを一体的に形成したものであるか、あるいは接着剤または他の手段によって一体的にプレス成形されている。下側反時計回り捕捉板4および上側反時計回り捕捉板5の回転は、反時計回りの捕捉板ギア15に接続された反時計回りの捕捉板軸体14によって駆動される。下側の時計回りの捕捉板9および上側の時計回りの捕捉板10の回転は、時計回りの捕捉板ギア16に接続された時計回りの捕捉板軸体13によって駆動される。時計回りの捕捉板軸体13は、反時計回りの捕捉板軸体14と同軸である。モータ22が回転力をシステムに加えると、慣性推力質量体3は、慣性推力質量体2に対して相対する遠心軌道内を移動する。
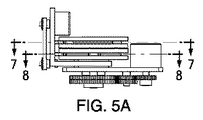
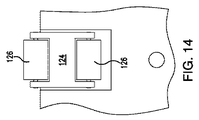
本発明の別の実施形態は、図1乃至15に開示されている。本実施形態は、上述した主要な実施形態と大部分の点で同じである。しかし、以下に述べるように、推力質量体は球形ではない。むしろ、質量体は、対向するローラ上を移動する重み付き板から形成される。加えて、各推力質量体を捕捉ディスクに対して拡張した方向に押すようにバネが含まれている。これにより、推力質量体が確実に露出され、回転時に衝撃ランプに接触する。これは、装置によって生成される直線推力を増加させる効果を有する。本実施形態は、以下により詳細に開示される。
Claims (8)
- 回転運動を直線運動に変換するための装置であって、
前方端部および後方端部を有する駆動板であって、同駆動板は、電気モータおよび前記前方端部に隣接して形成された衝撃ランプを支持する、駆動板と、
一対の上側捕捉板であって、一連の等間隔の半径方向スロットが前記上側捕捉板の間に形成され、前記半径方向スロットの各々が推力質量体を収容し、各推力質量体が、対向するローラを含み、これにより前記推力質量体が、格納位置と拡張位置との間を移動可能であり、バネが前記半径方向スロットの各々の内部に配置され、前記バネが対応する前記推力質量体を前記拡張位置に付勢し、前記モータは、第1の方向に前記上側捕捉板および関連付けられる前記推力質量体を回転させるように機能する、一対の上側捕捉板と、
一対の下側捕捉板であって、一連の等間隔の半径方向スロットが前記下側捕捉板の間に形成され、前記半径方向スロットの各々が推力質量体を収容し、各推力質量体が、対向するローラを含み、これにより前記推力質量体が、格納位置と拡張位置との間を移動可能であり、バネが前記半径方向スロットの各々の内部に配置され、前記バネが対応する前記推力質量体を前記拡張位置に付勢し、前記モータは、前記第1の方向とは反対側の第2の方向に前記下側捕捉板および関連付けられる前記推力質量体を回転させるように機能する、一対の下側捕捉板とを備え、
前記上側捕捉板と前記下側捕捉板との逆回転により、前記推力質量体が前記衝撃ランプに順次衝突し、各衝突により、対応する推力質量体が対応するバネの付勢に抗して格納位置に押し込まれ、それによって前進直線運動が生じることを特徴とする回転運動を前進直線運動に変換するための装置。 - 前記バネが板バネであることを特徴とする請求項1に記載の装置。
- 前記バネは、関連付けられるレバーアームを有するコイルバネであることを特徴とする請求項1に記載の装置。
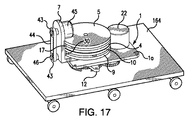
- 前記駆動板が車両に取り付けられていることを特徴とする請求項1に記載の装置。
- 前記車両が水上で浮遊するように構成されていることを特徴とする請求項4に記載の装置。
- 前記車両が車輪を含むことを特徴とする請求項4に記載の装置。
- 前記衝撃ランプの前記位置は、前記前進直線運動の大きさおよび方向を変更するように調整可能であることを特徴とする請求項4に記載の装置。
- 3つの等間隔の半径方向スロットが、前記上側捕捉板と前記下側捕捉板との間に含まれることを特徴とする請求項4に記載の装置。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US14/498,654 | 2014-09-26 | ||
| US14/498,654 US9631609B2 (en) | 2006-08-30 | 2014-09-26 | Propulsion system |
| US14/666,989 US9664179B2 (en) | 2006-08-30 | 2015-03-24 | Propulsion system |
| US14/666,989 | 2015-03-24 | ||
| PCT/US2015/052293 WO2016049491A1 (en) | 2014-09-26 | 2015-09-25 | Propulsion system |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017536522A true JP2017536522A (ja) | 2017-12-07 |
| JP6591549B2 JP6591549B2 (ja) | 2019-10-16 |
Family
ID=55582074
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2017536223A Active JP6591549B2 (ja) | 2014-09-26 | 2015-09-25 | 推進システム |
Country Status (8)
| Country | Link |
|---|---|
| EP (2) | EP3198141A4 (ja) |
| JP (1) | JP6591549B2 (ja) |
| CN (1) | CN107002640B (ja) |
| AU (2) | AU2015320408A1 (ja) |
| BR (1) | BR112017006283B1 (ja) |
| CA (1) | CA2962596A1 (ja) |
| MX (1) | MX2017003904A (ja) |
| WO (1) | WO2016049491A1 (ja) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111408963A (zh) * | 2020-04-24 | 2020-07-14 | 合肥康东柴油机配套有限公司 | 一种柴油发动机扇形推力块的加工检验工装及方法 |
| US12146473B2 (en) * | 2022-02-18 | 2024-11-19 | Pnetics, Llc | Propulsion device |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3025841A (en) * | 1960-10-17 | 1962-03-20 | Caterpillar Tractor Co | Cam follower and spacer for engine valves |
| US5388470A (en) * | 1993-06-28 | 1995-02-14 | Marsh, Jr.; Richard O. | Centrifugal force drive machine |
| US20080121071A1 (en) * | 2006-08-30 | 2008-05-29 | Plews Dennis J | Stardrive propulsion system |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2009780A (en) | 1934-04-09 | 1935-07-30 | Isidor B Laskowitz | Centrifugal variable thrust mechanism |
| US3584515A (en) | 1969-01-09 | 1971-06-15 | Laszlo B Matyas | Propulsion apparatus |
| US3807244A (en) | 1972-04-12 | 1974-04-30 | F Estrade | Device for transforming kinetic energy |
| US3968700A (en) | 1974-08-01 | 1976-07-13 | Cuff Calvin I | Device for converting rotary motion into a unidirectional linear motion |
| US3998107A (en) | 1974-10-29 | 1976-12-21 | Cuff Calvin I | Device for converting rotary motion into a unidirectional linear motion |
| US4744259A (en) * | 1987-06-05 | 1988-05-17 | Peterson Oscar F A | Apparatus for producing a directional unit force |
| GB2361277B (en) * | 2000-04-05 | 2004-07-14 | Peter Joseph Anthony Carroll | Kinetic engery device |
| CN1616822A (zh) * | 2003-11-11 | 2005-05-18 | 邱金和 | 动力产生的方法和装置 |
| US20060070488A1 (en) * | 2004-09-28 | 2006-04-06 | Tavarez Harold A | Propellantless propulsion engine |
| CN2924057Y (zh) * | 2005-12-28 | 2007-07-18 | 邱金和 | 动力产生装置 |
| US20080223636A1 (en) * | 2006-11-29 | 2008-09-18 | Gutsche Gottfried J | Method and device for self-contained inertial |
-
2015
- 2015-09-25 CN CN201580052178.3A patent/CN107002640B/zh active Active
- 2015-09-25 WO PCT/US2015/052293 patent/WO2016049491A1/en not_active Ceased
- 2015-09-25 CA CA2962596A patent/CA2962596A1/en active Pending
- 2015-09-25 EP EP15845469.4A patent/EP3198141A4/en not_active Withdrawn
- 2015-09-25 AU AU2015320408A patent/AU2015320408A1/en not_active Abandoned
- 2015-09-25 EP EP22199377.7A patent/EP4144988A1/en active Pending
- 2015-09-25 JP JP2017536223A patent/JP6591549B2/ja active Active
- 2015-09-25 MX MX2017003904A patent/MX2017003904A/es unknown
- 2015-09-25 BR BR112017006283-6A patent/BR112017006283B1/pt active IP Right Grant
-
2019
- 2019-08-19 AU AU2019219720A patent/AU2019219720A1/en not_active Abandoned
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3025841A (en) * | 1960-10-17 | 1962-03-20 | Caterpillar Tractor Co | Cam follower and spacer for engine valves |
| US5388470A (en) * | 1993-06-28 | 1995-02-14 | Marsh, Jr.; Richard O. | Centrifugal force drive machine |
| US20080121071A1 (en) * | 2006-08-30 | 2008-05-29 | Plews Dennis J | Stardrive propulsion system |
Also Published As
| Publication number | Publication date |
|---|---|
| CA2962596A1 (en) | 2016-03-31 |
| EP4144988A1 (en) | 2023-03-08 |
| BR112017006283B1 (pt) | 2022-09-27 |
| AU2019219720A1 (en) | 2019-09-05 |
| EP3198141A1 (en) | 2017-08-02 |
| CN107002640B (zh) | 2020-04-10 |
| JP6591549B2 (ja) | 2019-10-16 |
| WO2016049491A1 (en) | 2016-03-31 |
| EP3198141A4 (en) | 2018-05-23 |
| BR112017006283A2 (pt) | 2017-12-12 |
| CN107002640A (zh) | 2017-08-01 |
| MX2017003904A (es) | 2018-03-15 |
| AU2015320408A1 (en) | 2017-04-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2008027296A2 (en) | Stardrive propulsion system | |
| WO2011155866A1 (ru) | Устройство электромеханического привода аэродинамической поверхности самолета | |
| CN104747320A (zh) | 转动控制固体姿轨控发动机 | |
| US9631609B2 (en) | Propulsion system | |
| US20190331096A1 (en) | Directional Motive Force Generation Device | |
| JP2018527246A (ja) | 電気スラスタを備えた地球周回衛星のための操作システム | |
| JP6591549B2 (ja) | 推進システム | |
| US20240035458A1 (en) | Method and Apparatus for Accelerating a Vehicle in a Gravitational Field | |
| US9664179B2 (en) | Propulsion system | |
| HK1241954A1 (en) | Propulsion system | |
| HK1241954B (zh) | 推进系统 | |
| US20040103729A1 (en) | Dual-axis centrifugal propulsion system | |
| KR20110104835A (ko) | 추진력 발생 유닛 및 이를 포함하는 추진력 발생 장치 | |
| EP2038172B1 (en) | Gyroscopic apparatus | |
| KR100338326B1 (ko) | 추진력 발생방법 및 그 장치 | |
| US20240125307A1 (en) | Directional Motive Force Generation Device | |
| JP2025501151A (ja) | 衝撃推進システム | |
| JP2007032551A (ja) | 往復動型推進移動体 | |
| RU2316720C2 (ru) | Механизм комбинированного управления ракетой | |
| JP2021173215A (ja) | 推進装置並びに推進装置を備えた飛行体 | |
| JP2024034990A (ja) | 遠心偏移慣性力推進エンジン | |
| WO2024194886A1 (en) | Tethered vehicle launch system | |
| CN115723969A (zh) | 一种离心力电推进发动机 | |
| RU2468488C1 (ru) | Устройство преобразования энергии вращательного движения в поступательное | |
| UA15767U (en) | Gyro-turbine vehicle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180912 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20190807 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190820 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190918 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6591549 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |