本特許出願は、2014年6月19日に出願された米国仮特許出願第62/014,613号「DUODENAL GASTROINTESTINAL DEVICES AND DELIVERY MECHANIAMS」に対して優先権を主張するものであり、参照により、その全体が本明細書に組み込まれる。
本出願は、現在の米国特許出願公開第2013−0109912−A1号である、2012年11月1日に出願された米国特許出願第13/666,919号「DUODENAL GASTROINTESTINAL DEVICES AND RELATED TREATMENT METHODS」に関連する可能性があり、その全体が、参照により本明細書に組み込まれる。
本明細書において言及されている出版物、特許、および特許出願の全ては、あたかも出版物、特許、または特許出願それぞれが参照として組み込まれることを具体的にまた個々に目的としていたように、参照として本明細書に組み込まれている。
概して、一実施の形態において、内視鏡のワーキングチャンネルに非被覆管腔内デバイスを装填する方法は、(1)アダプタのチャンネルが内視鏡のワーキングチャンネルと連通するように、内視鏡のハンドルにアダプタを取り付けることと、(2)デバイスの近位端が開放端部に配置されるまで、装填ツールの連結端部から装填ツールの開放端部まで装填ツールの内腔に非被覆管腔内デバイスを装填することと、(3)装填ツールの連結端部をアダプタに接続することと、(4)アダプタを通して装填ツールの内腔に沿って遠位に、且つワーキングチャンネル内に、非被覆管腔内デバイスの近位端を押すことと、を含む。
本実施の形態および他の実施の形態は、以下の特徴を1つまたはそれ以上含んでもよい。非被覆デバイスを装填することは、デバイスの遠位端が装填ツールの外側に残るように装填することを含んでもよい。方法は、非被覆管腔内デバイスの遠位端をアダプタのチャンネル内に前進させることをさらに含んでもよい。方法は、アダプタから装填ツールを取り除くことと、非被覆管腔内デバイスが完全にワーキングチャンネル内に入るまで非被覆管腔内デバイスの近位端を遠位に押し続けることと、をさらに含んでもよい。非被覆管腔内デバイスの近位端を押すことは、デバイスの近位端がアダプタのチャンネル内に0mm〜5mm入るまで押すことを含んでもよく、取り除くステップは、押すステップの後に取り除くことを含んでもよい。方法は、イントロデューサの一部がワーキングチャンネル内に延在するように、アダプタのチャンネルを通してイントロデューサを配置することをさらに含んでもよく、アダプタのチャンネルを通して非被覆管腔内デバイスの近位端を遠位に押すことは、イントロデューサの内腔を通してデバイスを押すことを含んでもよい。ワーキングチャンネル内に延在し得るイントロデューサの一部は、傾斜先端部であってもよい。装填することは、管腔内デバイスの近位端を引っ張るために把持具を使用することを含んでもよい。アダプタを取り付けることは、ハンドルの周囲にアダプタをスナップ嵌めすることを含んでもよい。ハンドルにアダプタを取り付けることは、アダプタが内視鏡に対する所定の位置に固定され得るようにアダプタおよびハンドルを取り付けることを含んでもよい。
概して、一実施の形態において、体管腔に非被覆管腔内デバイスをデリバリーする方法は、(1)非被覆管腔内デバイスを内視鏡のワーキングチャンネル内に前進させることと、(2)ワーキングチャンネルの遠位端が体管腔内の第1のデリバリー位置に配置されるまで、体管腔を通して内視鏡を前進させることと、(3)ワーキングチャンネルの遠位端を第1のデリバリー位置に維持しながら、管腔内デバイス上の第1のデリバリーマーカーが観察されるまで、ワーキングチャンネルの外に遠位に、且つ体管腔に沿って非被覆管腔内デバイスを前進させることと、(4)第1のデリバリーマーカーが観察された後、体管腔から内視鏡を引き出しながらワーキングチャンネルの外に非被覆管腔内デバイスを前進させることと、(5)非被覆管腔内デバイスが内視鏡のワーキングチャンネルから完全に解放されるまで前進させ続けることと、を含む。
本実施の形態および他の実施の形態は、以下の特徴を1つまたはそれ以上含んでもよい。方法は、第2のデリバリーマーカーが観察されたときに前進させるステップおよび引き出すステップを停止することと、体管腔内の第2のデリバリー位置における第2のデリバリーマーカーの配置に基づいて、管腔内デバイスの一部が体管腔に対して所望の位置にあることを確認することと、をさらに含んでもよい。第2のデリバリー位置は、幽門に隣接する十二指腸球部であってもよい。方法は、第2のマーカーが第2のデリバリー位置の遠位にある場合、管腔内デバイスおよび内視鏡を近位に引き出すことをさらに含んでもよい。第2のデリバリーマーカーは、デバイスのワイヤ部上の嵩高特徴部であってもよい。第1のデリバリーマーカーは、デバイスの第2の部分とは異なる色のデバイスの部分であってもよい。内視鏡は、胃内視鏡であってもよい。第1のデリバリー位置は、十二指腸の第三部であってもよい。前進させ続けることは、デバイスの遠位端が十二指腸の第四部内にあるように非被覆管腔内デバイスを前進させることを含んでもよい。
概して、一実施の形態において、内視鏡を通して管腔内デバイスをデリバリーするためのシステムは、デリバリーツールおよびアダプタを含む。デリバリーツールは、管腔内デバイスの一部をその中に保持するように構成される細長いチューブと、細長いチューブの遠位端上の第1の接続特徴部と、を有する。アダプタは、内視鏡のハンドルに取り付けるように構成される。アダプタは、そこを通るチャンネルと、デリバリーツールの第1の接続特徴部と嵌合するように構成される第2の接続特徴部と、を含む。デリバリーツールの細長いチューブは、第1および第2の接続特徴部が嵌合したときにアダプタのチャンネルと整列するように構成される。
本実施の形態および他の実施の形態は、以下の特徴を1つまたはそれ以上含んでもよい。システムは、アダプタのチャンネルを通って内視鏡のワーキングチャンネル内に延在するように構成され得る管状部材を有するイントロデューサをさらに含んでもよい。管状部材は、ワーキングチャンネル内に延在するように構成される傾斜端部を有してもよい。イントロデューサは、アダプタのスロットと嵌合するように構成されるピンをさらに含んでもよい。ピンおよびスロットは、ワーキングチャンネル内で傾斜端部を方向付けするようにさらに構成されてもよい。アダプタは、第1の構成要素および第2の構成要素を含んでもよい。第1および第2の構成要素は、内視鏡ハンドルの一部の周囲で一緒にスナップ嵌めするように構成されてもよい。接続特徴部は、第1のピンおよび第2のピンを含んでもよく、アダプタは、第1の構成要素に第1のボア、また第2の構成要素に第2のボアを含んでもよい。第1および第2の接続特徴部が嵌合したときに、第1のピンは、第1のボア内に適合するように構成されてもよく、第2のピンは、第2のボア内に適合するように構成されてもよい。第1および第2の接続特徴部は、スナップ嵌め特徴部であってもよい。
概して、一実施の形態において、胃内デバイスは、ワイヤ伸長部材と、ワイヤアンカーと、伸長部材またはアンカーの一部を覆う嵩高構成要素と、を含む。嵩高構成要素は、螺旋状に切り込みの入ったチューブを含む。
本実施の形態および他の実施の形態は、以下の特徴を1つまたはそれ以上含んでもよい。胃内デバイスは、その遠位端で伸長部材に取り付けられたスリーブをさらに含んでもよい。スリーブは、伸長部材に沿って遠位に摺動し、複数の放射方向に膨張した流量減少要素を形成するように構成されてもよい。嵩高構成要素は、伸長部材の一部を覆ってもよく、スリーブが膨張していないときに、嵩高構成要素とスリーブの近位端との間の間隙が0.5インチ以下であるように配置されてもよい。嵩高構成要素は、ポリエチレンテレフタレートチューブを含んでもよい。螺旋は、0.05インチ〜0.25インチのピッチを有してもよい。ピッチは、約0.125インチであってもよい。嵩高構成要素の内径は、その間に間隙が存在するように、伸長部材またはアンカーの一部の外径より大きくてもよい。嵩高構成要素は、螺旋状に切り込みの入ったチューブの端部でのみワイヤに取り付けられてもよい。嵩高構成要素は、粘着剤で伸長部材またはアンカーの一部に取り付けられてもよい。伸長部材またはアンカーの一部は、粘着剤を保持するように構成される溝をそこに含んでもよい。ワイヤ伸長部材またはワイヤアンカーは、ニチノールを含んでもよい。ニチノールは、電解研磨されてもよい。ワイヤは、0.015インチ〜0.030インチの外径を有してもよく、嵩高部は、0.050インチ〜0.15インチの外径を有してもよい。
概して、一実施の形態において、胃内デバイスは、伸長部材と、伸長部材に取り付けられたスリーブと、伸長部材の近位端に取り付けられたアンカーと、を含む。スリーブは、伸長部材に沿って遠位に摺動し、複数の放射方向に膨張した流量減少要素を形成するように構成される。伸長部材は、その上に2つのマーカーを含む。マーカーの各々は、消化管の異なる部分と一致するように構成される。
本実施の形態および他の実施の形態は、以下の特徴を1つまたはそれ以上含んでもよい。異なる部分のうちの1つは、十二指腸の第三部であってもよい。異なる部分のうちの1つは、幽門に隣接する十二指腸球部であってもよい。マーカーのうちの少なくとも1つは、デバイスのワイヤ部上の嵩高特徴部であってもよい。少なくとも1つのマーカーの近位端は、マーカーの近位端からデバイスの遠位端までの距離が、幽門から十二指腸の第四部までの距離とほぼ等しくなるように配置されてもよい。マーカーのうちの少なくとも1つは、デバイスの第2の部分とは異なる色またはテクスチャのデバイスの部分であってもよい。少なくとも1つのマーカーの近位端は、マーカーの近位端からデバイスの遠位端までの距離が、十二指腸の第三部の近位端から十二指腸の第四部までの距離とほぼ等しくなるように配置されてもよい。マーカーのうちの少なくとも1つは、スリーブの下にあってもよい。伸長部材は、消化管への挿入前に予め設定された形状を有してもよく、伸長部材は、消化管への挿入後に予め設定された形状に戻るように構成されてもよい。
ヒトの消化管を示す図
消化管内にインプラントされた消化管インサートの実施の形態を示す図
消化管内にインプラントされた消化管インサートの別の実施の形態を示す図
図2Aのインサートの詳細図
図2Aのインサートの膨張したシースを示す図
図3Aのシースの近位端の拡大図
図2Aのインサートの近位側アンカーの拡大図
図2Aのインサートの近位側アンカーの拡大図
図2Aのインサートの近位側アンカーの拡大図
図2Aのインサートの近位側アンカーの拡大図
図2Aのインサートの近位側アンカーの拡大図
1/2の巻きを有する消化管インサートの引っ張りループの図
1と1/2の巻きを有する引っ張りループの図
引っ張りループの付加的な変形例の図
引っ張りループの付加的な変形例の図
その上に嵩高構成要素を有する図2Aのインサートの図
嵩高構成要素を有するアンカーの拡大図
嵩高構成要素を有するアンカーの拡大図
消化管インサートのスパイン上の螺旋状嵩高構成要素の外側図
消化管インサートのスパイン上の螺旋状嵩高構成要素の断面図
消化管インサートのアンカーの螺旋状嵩高構成要素の図
その一部の周囲に薄いコーティングを有する消化管インサートの図
図10Aのワイヤおよびコーティングの拡大図
太いワイヤを有する消化管インサート
消化管インサートのステムの遠位端とインサートのスパインの近位端との一例の接続点の図
消化管インサートのステムの遠位端とインサートのスパインの近位端との一例の接続点の図
管腔内デリバリーシステムの装填ツールの図
管腔内デリバリーシステムの装填ツールの図
管腔内デリバリーシステムの装填ツールの図
管腔内デリバリーシステムの装填ツールの図
管腔内デリバリーシステムのアダプタの第1の側の図
管腔内デリバリーシステムのアダプタの第1の側の図
管腔内デリバリーシステムのアダプタの第1の側の図
管腔内デリバリーシステムのアダプタの第1の側の図
管腔内デリバリーシステムのアダプタの第1の側の図
管腔内デリバリーシステムのアダプタの第1の側の図
管腔内デリバリーシステムのアダプタの第2の側の図
管腔内デリバリーシステムのアダプタの第2の側の図
管腔内デリバリーシステムのアダプタの第2の側の図
管腔内デリバリーシステムのアダプタの第2の側の図
管腔内デリバリーシステムのアダプタの第2の側の図
図14A〜図14Fおよび図15A〜図15Eに示す第1および第2の側を一緒に接続した図
図14A〜図14Fおよび図15A〜図15Eに示す第1および第2の側を一緒に接続した図
管腔内デリバリーシステムのイントロデューサの図
図13A〜図13Dの装填ツール、図17のイントロデューサ、図16A〜図16Bのアダプタ、および内視鏡の相互接続の図
図13A〜図13Dの装填ツール、図17のイントロデューサ、図16A〜図16Bのアダプタ、および内視鏡の相互接続の図
図13A〜図13Dの装填ツール、図17のイントロデューサ、図16A〜図16Bのアダプタ、および内視鏡の相互接続の図
図13A〜図13Dの装填ツール、図17のイントロデューサ、図16A〜図16Bのアダプタ、および内視鏡の相互接続の図
管腔内デバイスを取り除くように構成されるオーバーチューブの図
管腔内デバイスを取り除くように構成されるオーバーチューブの図
管腔内デバイスを取り除くように構成されるオーバーチューブの図
管腔内デバイスを取り除くように構成されるオーバーチューブの図
アンカーとスパインとの間に圧縮ばねを有するインサートの図
アンカーとスパインとの間に引っ張りばねを有するインサートの図
アンカーとスパインとの間に複数のワイヤストランドを有するアンカーの図
アンカーとスパインとの間に複数のワイヤストランドを有するアンカーの図
アンカーとスパインとの間に複数のワイヤストランドを有するアンカーの図
アンカーとスパインとの間に複数のワイヤストランドを有するアンカーの図
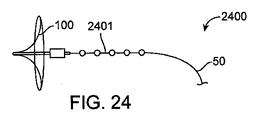
チェーンリンクを含むインサートの図
図24のインサートのための一例のチェーンリンクの図
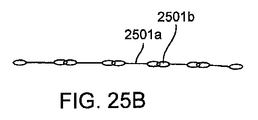
図24のインサートのための一例のチェーンリンクの図
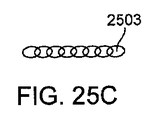
図24のインサートのための一例のチェーンリンクの図
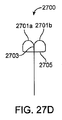
図24のインサートのための一例のチェーンリンクの図
アンカーとスパインとの間にケーブルを含むインサートの図
アンカーの別の実施の形態の図
アンカーの別の実施の形態の図
アンカーの別の実施の形態の図
アンカーの別の実施の形態の図
アンカーの別の実施の形態の図
アンカーの別の実施の形態の図
アンカーの別の実施の形態の図
アンカーの別の実施の形態の図
アンカーの別の実施の形態の図
アンカーの別の実施の形態の図
一例の編組型近位側アンカーの図
アンカーの別の実施の形態の図
アンカーの別の実施の形態の図
アンカーの別の実施の形態の図
アンカーの別の実施の形態の図
アンカーの別の実施の形態の図
アンカーの別の実施の形態の図
アンカーの別の実施の形態の図
アンカーの別の実施の形態の図
アンカーの別の実施の形態の図
アンカーの別の実施の形態の図
アンカーの別の実施の形態の図
アンカーの別の実施の形態の図
アンカーの別の実施の形態の図
アンカーの別の実施の形態の図
アンカーの別の実施の形態の側面図
アンカーの別の実施の形態の上面図
アンカーの別の実施の形態の図
アンカーの別の実施の形態の図
アンカーの別の実施の形態の図
アンカーの別の実施の形態の図
アンカーの別の実施の形態の図
アンカーの別の実施の形態の図
アンカーの別の実施の形態の図
アンカーの別の実施の形態の図
アンカーの別の実施の形態の図
アンカーの別の実施の形態の図
アンカーの別の実施の形態の図
嵩高構成要素としてワッシャーを含むインサートの図
嵩高構成要素として引き締め可能なバッグを含むインサートの図
アンカーの別の実施の形態の図
図41Aのアンカーに柔軟性を提供するカラーの図
回転可能なアンカーの図
分割された引っ張りループを有するアンカーの図
アンカーの別の実施の形態の図
バルーンアンカーの図
内視鏡の近位端の断面図
内視鏡ワーキングチャンネルフランジの内腔内のデリバリーシステムのイントロデューサの拡大図
図2Bのインサートの詳細図
図2Bのインサートの嵩高構成要素
図2Bのインサートの嵩高構成要素
図2Bのインサートのマーカーの図
内視鏡のワーキングチャンネルの外に管腔内デバイスをデリバリーする際に使用されるプッシャーの図
図2Bのインサートのワイヤにある一例の溝の図
図2Bのインサートのワイヤにある一例の溝の図
図2Bのインサートのワイヤにある一例の溝の図
図2Bのインサートのワイヤにある一例の溝の図
図2Bのインサートのワイヤにある一例の溝の図
図13A〜図13Dの装填ツール内への管腔内デバイスの段階的装填の図
図13A〜図13Dの装填ツール内への管腔内デバイスの段階的装填の図
図13A〜図13Dの装填ツール内への管腔内デバイスの段階的装填の図
図13A〜図13Dの装填ツール内への管腔内デバイスの段階的装填の図
図13A〜図13Dの装填ツール内への管腔内デバイスの段階的装填の図
図13A〜図13Dの装填ツール内への管腔内デバイスの段階的装填の図
図18A〜図18Dのシステムについて、内視鏡へのアダプタの接続、アダプタへのインサータの接続、およびアダプタへの装填ツールの接続を段階的に示す図
図18A〜図18Dのシステムについて、内視鏡へのアダプタの接続、アダプタへのインサータの接続、およびアダプタへの装填ツールの接続を段階的に示す図
図18A〜図18Dのシステムについて、内視鏡へのアダプタの接続、アダプタへのインサータの接続、およびアダプタへの装填ツールの接続を段階的に示す図
図18A〜図18Dのシステムについて、内視鏡へのアダプタの接続、アダプタへのインサータの接続、およびアダプタへの装填ツールの接続を段階的に示す図
図18A〜図18Dのシステムについて、内視鏡へのアダプタの接続、アダプタへのインサータの接続、およびアダプタへの装填ツールの接続を段階的に示す図
内視鏡のワーキングチャンネル内の一例のプッシャーを示す図
嵩高構成要素とシースの近位端との間の空間を示す図
図1は、胃4と小腸10の十二指腸とを含む人間の消化管を示している。重要な特徴部として、食道2、胃4、前庭部7、幽門8、幽門弁11、十二指腸10、空腸12、およびファーター膨大部(胆膵管膨大部)13があり、これらは、膵管と総胆管の結合によって形成されている。機能的には、食道2は、その上端で鼻または口からはじまり、その下端で胃4で終わる。胃4は、食道−胃連結部6(食道2のための開口部)と前庭部−幽門間連結部5(幽門8を通過する前庭部7と小腸の十二指腸10との間の流路)とによって特徴付けられるチャンバーを囲んでいる。幽門8は幽門弁11および括約筋を介して胃4の内容物の排出をコントロールし、幽門弁11により、十分に消化された胃の内容物(すなわち、約1立方センチメートル以下の物体)が十分に通過できるように幽門8が大きく開く。これらの胃の内容物は、十二指腸10内に入った後、続いて空腸12に入り、その後回腸(図示せず)に入る。十二指腸10、空腸12、および回腸は、いわゆる小腸を構成している。なお、消化管のこれらの部分はそれぞれが小腸と呼ばれる場合もある。本発明の明細書においては、十二指腸、空腸、および/または回腸の全てまたは一部を小腸と言及することがありうる。消化に役立つ胆液および膵液を提供するファーター膨大部13は、十二指腸10の内壁上の小さい突起として図示されている。
本発明の実施の形態のデバイスは、消化管内の留置位置に、特に十二指腸に安定を与える様々な形態を含んでいる。腸インサートの同意語として言及されるいくつかの実施の形態のデバイスは、胃内に留まり且つ幽門を通過するには大き過ぎるアンカー部材によって腸内で安定される。他の実施の形態において、腸内で安定する特徴部として、十二指腸の遠位側の部分に比べて大きい十二指腸球部内で拡大し、それにより遠位側への移動が効率的に防止されるデバイスの部分が挙げられる。
デバイスおよびそのデバイスの使用方法のいくつかの実施の形態が、食物の移動速度に介入する物理的機構によって小腸を通過する食物の移動速度を減少させることを目的としている。他の態様において、本発明の実施の形態は、生理学的機構によって、その代わりとして、生体活性材または生物活性剤を介する満腹信号の直接的な提供によって、または、ニューロン刺激を介して満腹信号を生成することによって役割を果たし、それにより、食物摂取行動を抑える。実施の形態のデバイスおよび方法の満腹機能性および食物摂取機能性が本明細書で詳細に説明されるけれども、デバイスのいくつかの実施の形態は、満腹生理および消化生理のみに比べて広い医療的範囲を目的としている。非肥満医療または満腹誘発医療の利用の例として、いくつかの実施の形態のデバイスは、生物活性剤や当該デバイスによって送られる医療的に適切な薬品などの溶出源として使用されてもよい。いくつかの態様において、実施の形態のデバイスは、食物の移動を遅らせることおよび/またはデバイスの単なる物理的存在に直接的に反応する腸によって発生された満腹信号によって食物摂取量を抑えることに寄与してもよい。このような信号は、例えば、腸壁内のストレッチ応答ニューロンや機械的受容体によって調節されてもよい。他の実施の形態において、満腹信号は、腸内の物質の物理的存在に反応するホルモン、または機械的受容体に副次的に反応するホルモンによって調節されてもよい。他の実施の形態において、食物の速度の低下、残留時間の増加、その結果としての腸内の化学環境の変化は、満腹信号の正味の効果を持つようなニューロン的またはホルモン的な信号を送るために、腸内に存在する化学受容体の反応を引き起こしてもよい。
さらに本発明の他の実施の形態において、デバイスは、時間をかけて腸内に放出される生物活性材または生物活性剤を搬送してもよく、その生物活性剤が、正味の満腹信号を搬送する。いくつかの実施の形態において、正味の満腹信号効果を備える生物活性剤は、デバイス内のコーティング、貯蔵部、容器などの場所から受動的に排出される。生物活性材または生物活性剤は、ホルモン、薬剤、または細胞などが含まれてもよい。いくつかの実施の形態において、生物活性剤は、浸透圧ポンプに保持され、浸透圧ドライブ(osmotic drive)によって放出されてもよい。浸透圧ポンプなどの放出機構は、生物活性剤の放出に関してレベルの制御および予測を行うが、相対的に受動的であり、介入手段を用いない。なお、本発明の別の態様は、印加電流に対応して蓄えている生物活性剤を放出することができるまたは放出を促進する電気駆動ポンプまたは圧電素子によって生物活性剤を放出するまたはデリバリーする、より能動的な機構を含んでもよい。このようなデバイスは、蓄電要素を含んでもよい、または、有線アプローチまたは無線アプローチを介して外部電源から電力を供給されてもよい。
本発明のさらに他の実施の形態において、デバイスは、腸内の神経に電気刺激を与える電極または導体要素を含んでもよく、その結果としての神経活性は脳内に満腹信号を送る正味の効果に寄与する。いくつかの実施の形態において、満腹に関連する神経活性は、内分泌機構によってさらに調節されてもよい。生物活性剤を放出するための動力機構を備える本発明の実施の形態のように、電気的機能を備える実施の形態は、蓄電デバイスを含んでもよく、または、外部電源から供給されたエネルギを受け取ることができるように構成されてもよい。
本発明の他の態様において、アンカーを備えるまたは備えていない実施の形態のインサートデバイスは、満腹感への誘導や食物移動速度の低下を少なくとも含むより広い医療目的のために、生物活性剤デリバリー、神経刺激デリバリー、または放射線治療デリバリーのためのプラットフォームを提供してもよい。いくつかの生物活性剤のデリバリーに関して、腸内の部分に物質を局所的にデリバリーすることには多くの利点が存在する。そのような利点として、投薬が局所化すること、経口デリバリーにおいて生じるような胃酸への曝露がないこと、薬品デリバリーまたは他の形態の全身性のデリバリーが直面する肝臓および腎臓の代謝機構への曝露が減少することが挙げられる。さらに、実施の形態のデバイスは、複数の薬品を収容してもよく、いくつかの実施の形態においては、そのような複数の薬品の放出が独立して制御されてもよい。
ここでは、本発明の実施の形態に関連する、消化系、消化プロセス、および満腹の内分泌学的および神経生理学的な態様について説明する。大人の十二指腸は、約20〜25cmの長さであり、最も短く、最も幅広く、また最も有効的な小腸の部分である。十二指腸は、あおむけ姿勢における第1腰椎の位置と第3腰椎の位置との間に存在する細長い「C」字形状である。Susan Standring著、Gray’s Anatomy 39th 1163−64(2005)は、標準的基準を提供する。参照のために、また消化系の態様のさらなる詳細を説明するために、図1に戻る。多くの場合に十二指腸球部10aと呼ばれる十二指腸の第1部は、約5cmの長さであり、幽門8の十二指腸側端から連続的にはじまる。この十二指腸の第1部は、下方に鋭く曲がって十二指腸の第1部の端である十二指腸曲465に到達する前の5cmの間に、上方に、後方に、横方向に通過する。多くの場合に十二指腸下行部10bと呼ばれる十二指腸の第2部は、約8〜10cmの長さである。それは、上方の十二指腸曲465から始まり、緩やかなカーブで下方向に第3腰椎体に向かって進む。ここでは、十二指腸の第3部との結合部である下方側の十二指腸曲475に向かって内側に鋭く曲がる。多くの場合に十二指腸水平部10cと呼ばれる十二指腸の第3部は、下方側の十二指腸曲からはじまり、約10cmの長さである。それは、第3腰椎の下側縁の右側から進み、わずかに上方向に曲がり、左に曲がり、そして腹部大動脈の前側の十二指腸の第4部につながる。十二指腸の第4部は、約2.5cmの長さであり、大動脈の左に向かって始まり、第2腰椎の上側縁の高さ位置に上方向および横方向に進む。次に、十二指腸空腸曲で前方且つ下方に曲がり、空腸に結合する。
消化プロセスは、消費された食物が胃内で唾液および酵素と混ざると開始する。ひとたび食物が飲み込まれると、消化は食道内および胃内で継続され、食物は酸および付加的な酵素と結合して液化される。食物は、一定期間、胃内に留まり、次に小腸の十二指腸内に移動して胆液と膵液とに混ざる。消費された食物と胆液および膵液との混合により、そこに含まれる栄養素を、小腸内の絨毛および微絨毛が、また身体の他の吸収器官が吸収可能になる。
Robert C.Ritter著であって、Physiology&Behavior 81(2004)249−273によって公表された”Gastrointestinal mechanisms of satiation for food”は、食欲をコントロールのために消化管を利用する様々な手段の我々の理解を要約している。彼は、満腹状態での胃の役割は、食事から得られた摂取物の量を検出することと、満腹状態に関連する物質を示す様々な信号を生成することであると述べている。なお、これらの信号を受け取るのは、具体的には小腸である。さらに、摂取物のエネルギ密度に反応する腸は、さらなる胃内容排出を制限し、適切なカロリーが摂取されると満腹を示す信号を送る。求心性神経の位置の解析を介して(p.255)、Ritterは、迷走神経の求心性神経が十二指腸内に最も集中し、より遠位の回腸内では最も少ないこと述べている。この早期での求心性神経の集中は、食事プロセスの早期において食欲を抑制する。さらに、猿、ねずみ、人間を含む様々な哺乳類における栄養摂取に対する反応の瞬時性が、他の部分で証明されている。食物摂取の減少は摂取し始めてから数分内で始まること、および、そのためにその減少が吸収後の効果またはシステム的な代謝効果に対する反応ではないことは明らかにされている。これらのRitterの一節は、具体的には、本明細書で説明されるデバイスの配置に関連するまたは本発明の実施の形態の流量減少要素の位置および大きさに関する参照として本明細書に組み込まれている。
胃および小腸内での部分的に消化された食物の存在により、続いて、食物摂取の停止に寄与する近位側の小腸から主に放出される満腹信号を生成する、生物学的信号生成が始まる。このような満腹信号の1つが、コレシストキニン(CCK)の放出によって開始される。小腸の細胞が、消化された食物の存在に反応して、特に、食物脂肪、脂肪酸、小ペプチド、およびアミノ酸に反応してCCKを放出する。CCKのレベル上昇により、食事量および食事期間が減少し、それは複数の異なる機構を介して行われる。例えば、CCKは、肝臓内のCCK−A受容体や満腹信号を生じさせる中枢神経系内に作用することができる。CCKは、肝臓内と弧束核に向かって突出する幽門との両方の内部の求心性迷走神経繊維を刺激し、脳の部分が、食物摂取量と摂取行動を中心的に規制する視床下部に連絡する。CCKはまた、胆嚢および膵臓からの酵素の放出を刺激し、胃内容排出を抑制する。CCKが胃内容排出の強力阻害剤であるため、食物摂取の制限へのいくつかの効果が、胃内の食物の貯留によって調節される。
小腸の細胞(特にL細胞)はまた、消化の栄養シグナルに反応して、グルカゴン様ペプチド1(GLP−1)およびオキシントモジュリン(OXM)を放出する。GLP−1およびOXMのレベル上昇は、満腹信号および食物摂取の停止に関連している。これらのホルモンは、肝臓内および/またはGI管の求心性迷走神経上の受容体が活性化することにより、および/または胃内容排出を抑制することにより、満腹信号を送出することができる。
膵臓ペプチド(PP)は、摂取されたカロリー量に比例して、また胃拡張に反応して放出される。PPレベルの上昇は、食物摂取および体重の減少を示している。PPは、脳幹につながる求心性迷走神経路を介して、胃内グレリンの生成を抑制するなどのより局所的な効果を介して、いくつかの食欲減退効果を発揮する。
ペプチドYY3−36(PYY3−36)は、別の生物学的信号であり、その周辺への放出は、食物摂取の減少および/または食事の停止に関連する可能性がある。具体的には、低レベルのPYY3−36は肥満に関連し、それの投与がカロリー摂取および主観的な空腹度を減少させる。PYY3−36の静脈投与は、グレリン発現抑制効果、胃内容排出の遅延効果、膵臓および胃からの様々な分泌物に対する遅延効果、および食事後における回腸からの流体や電解液の吸収量の増加効果を介して、食物摂取を抑えることができる。
インスリンおよびレプチンは、満腹や摂取行動を規制する2つの付加的な生物学的信号である。副交感神経支配を介して、膵島のベータ細胞は、グルコースやアミノ酸などの血中栄養素に反応して、またGLP−1や胃抑制ペプチド(GIP)に反応してインスリンを放出する。インスリンは、グルコース代謝の増加を介して脂肪組織から生成されたレプチンを刺激する。脳内のインスリンレベルが増加すると、食物摂取量が減少される。レプチンのレベル増加により、食物摂取量が減少され、減量を引き起こす。インスリンおよびレプチンの投与によって食物摂取量を減らすのみによって説明される体重減少に比べて大きい減量が引き起こされるため、インスリンおよびレプチンはエネルギ消費の規制に関与する。インスリンおよびレプチンの両方が、たぶん交換神経系を活性化することによって食物摂取を抑制してエネルギ消費を増加する中枢神経系内に作用する。食物摂取量を減少させるインスリンの効果は、例えば、NPYやメラノコルチンリガンドを介して、摂取行動の規制に関連するいくつかの視床下部神経ペプチドとの相互作用を引き起こす。
食物摂取の抑制または阻止に関連する他のホルモン的または生物学的信号として、例えば、GIP(グルコース投与した後または高炭水化物食事の摂取後に腸内の内分泌腺のK細胞から分泌された)、エンテロスタチン(食物脂肪に反応して生成された)、アミリン(膵臓のベータ細胞からのインスリンと相互分泌された)、グルカゴン、ガストリン放出ペプチド(GRP)、ソマトスタチン、ニューロテンシン、ボンベシン、カルシトニン、カルシトニン遺伝子関連ペプチド、ニューロメジンU(NMU)、およびケトンなどがある。
本発明の実施の形態に関して、消化された食物またはびじゅく(chyme)が部分的に小腸の十二指腸内で妨げられ、その領域を通過する流速が減少すると(または、滞留時間が増加するように別の方法で同一の現象を発現させると)、胃および十二指腸は徐々に空になる。このことは満腹感を継続し、それにより食物摂取量が減少する(胃内に食物が長時間保持されるため)。食物の移動速度の低下により、GI管に沿った化学受容体、伸張受容体、および機械的受容体に対して消化された食物が部分的に作用する時間が増加し、それにより、満腹信号の刺激が増加されるおよび/または長期化され、その結果、食事中および/または食物摂取間の長い期間において食物摂取量が減少される。
長い期間小腸内に消化された食物が部分的に維持されることに加えて、本発明の方法およびデバイスは、小腸内に信号を放出することにより、満腹信号の放出を増進するおよび/または長期化してもよい。例えば、いくつかの実施の形態において、本発明の方法およびデバイスは、化学受容体に刺激を与える消化産物の栄養素を放出することにより、満腹信号の生成に寄与するホルモン信号および/または他の分子信号の放出を起こしてもよい。別の実施の形態において、本発明の方法およびデバイスは、GI管の壁に低圧を作用させることによって胃(機械的受容体)を刺激し、それにより満腹信号が生成されて脳に送られるようにしてもよい。別の実施の形態において、本発明の方法およびデバイスは、上記のように化学受容体に刺激を与えるために、例えば、食物消化の副生成物の栄養素を介するなどして信号を放出してもよく、また上述したように小腸の壁に小さい圧力を作用させて満腹信号の生成に寄与してもよい。
次に、本発明の実施の形態について説明する。図2Aおよび図2Bは、満腹信号の生成に寄与し得る、本発明に係るものとして作製された小腸インサート20、120を示す。図2Aを参照すると、インサート20は、胃4および小腸10に配置される。インサート20は、近位部30および遠位部40、ならびに近位部30から遠位部40まで延在する中央スパイン50を有する。小腸10内に適合するサイズの1つまたはそれ以上の流量減少要素200が、中央スパイン50に取り付けられてもよい。中央スパイン50は、その近位端にアンカー部材100を有し、アンカー部材100は、中央スパイン50の近位端を胃内に固定する。アンカー部材100は、幽門8を通過しないようなサイズである。このように、アンカー部材を含む本発明の実施の形態は、流量減少要素200を小腸内に固定する。ピグテール42は、スパイン40に無傷遠位端を提供する。
図2Bを参照すると、インサート120は、インサート20に類似するが、但し、嵩高構成要素171がスパイン50の上に示され、嵩高構成要素181がアンカー100の上に示され、流量減少要素200が膨張可能なスリーブ201の一部として示され、スパイン50の遠位端が、ピグテール42ではなく直線状の無傷特徴部121を含む。
図3は、インサート20のさらに詳細な図を示す。インサート20は、細長いスパイン50に沿って形成される流量減少要素200を含む。アンカー100は、近位端に取り付けられる。以下にさらに論じられるように、インサート20は、消化管にインプラントされたときに、インサート20の組織相互作用を最小限に抑えるようにデザインされた1つまたはそれ以上の特徴部、例えば、スパイン嵩高構成要素71および/またはアンカー嵩高構成要素81を含む。スパイン50の遠位端上のピグテール42および遠位ボール305も、インサート20がGI管にデリバリーされるとき、およびGI管の中に留置されている間に、スパイン50の端部が組織を損傷するのを防止することができる。
図3A〜図3Bを参照すると、流量減少要素200は、所定の位置で放射方向に膨張するように構成されるスリーブ201の一部であってもよい。スリーブ201は、例えば、編組型ポリエチレンテレフタレートフィラメントで形成されてもよい。スリーブ201は、遠位取付点203でスパイン50に融着されてもよい。スリーブ201をスパイン50に沿ってスライドさせて流量減少要素200を膨張させるように、管状スライド要素205は、その近位端でスリーブ201に取り付けられてもよい。スパインは、スリーブ201が極端に遠位に移動するのを防止するように構成されるストッパ59(図7または図2Bを参照)をさらに含んでもよい。
流量減少要素200の実施の形態は、多くの構成をとることができ、バルク材の組成、表面の性質、および多孔性等の物理的特性に関してさらに異なってもよい。一例の流量減少要素は、参照により本明細書に組み込まれる、現在の米国特許出願公開第2013−0109912−A1号である、2012年11月1日に出願された米国特許出願第13/666,919号「DUODENAL GASTROINTESTINAL DEVICES AND RELATED TREATMENT METHODS」に記載されている。実施の形態の流量減少要素が持つ共通の機能的特性は、適切な臨床的ガイドラインの範囲内において、消化中の食物の移動をブロックすることなく、遅らせることである。その移動速度を遅らせるプロセスは、代謝される栄養化合物に対する生化学的プロフィールを変化させるなど、消化中の食物材料の組成物に影響を与えることできる。十二指腸の化学受容体および神経は、びじゅく内の代謝の生化学的プロフィールに対して反応し、その結果、消化生理、満腹生理、および空腹生理の調整にかかわる。流速やびじゅくの生化学的プロフィールが変化するなどによって、本発明の実施の形態の小腸インサートは、満腹に関連する信号の生成に寄与する。流量減少要素はさらに、その流量減少要素によって起こる混合作用によって消化中の食物材料の組成物に影響を与えてもよい。
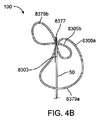
図4A〜図4Eは、近位側アンカー100の拡大図を示す。アンカー部材100は、スパイン50から離れて軸方向に延在するステム8303を含んでもよい。ステム8303は、互いに実質的に平行に延びる2つのワイヤ部を含んでもよい。2つのアーチ8305a、8305bは、ステム8303から離れて放射方向に延在し、2つの逆アーチ8379a、8379bは、アーチ8305a、8305bから延在し、引っ張りループ8377は、逆アーチ8379a、8379bに接続する。
近位側アンカー100は、特に近位の視点から軸方向に見たときに、ほぼ図8の形状を取ることができる。アーチ8305a、8305bそれぞれは、ステム8303から近位側に延在し、近位側のピークで曲がり、そして逆アーチ8379a、8379bそれぞれに合流するために遠位側に延在する。アーチ8305a、8305bは、ステム8303から離れるように縦方向および放射方向の両方に延在してもよい。このアーチ形状により、有利に、アンカー100が側方から押圧されたまたは圧縮されたときにアンカー8301を中心に位置合わせすることを補助することにより、フープ強さを提供することができる。アンカー100の図8の形状は、有利に、デリバリー中および取り除き中にからむことを抑制することができる。なぜなら、ワイヤの自由長さが最小化されているとともに、からむような重なる部分が存在しないからである。
アンカー100の逆アーチは、ステムの軸に対して実質的に垂直な(90度の)平面上にピークを持つまたは横たわるように図示されている。いくつかの実施の形態において、アンカー100の逆アーチは、ステムの頂部に対して120度などの90度以上に傾いてもよい(すなわち、図4Aに示すように、ステムと直交する平面の下方を延在してもよい)。このような角度の増加により、有利に、デリバリー中および使用中において逆アーチがアーチを跳ね上げてひっくり返すことを抑制することができる。
アーチ8305a、8305bの両方は、逆アーチ8379a、8379bに合流するように、反時計方向(近位側から見て)に延在してもよい。さらに、アーチ8305a、8305bは、実質的に正反対に放射方向に延在するように構成されている。実質的に正反対に放射方向に延在するアーチ8305a、8305bを備えることにより、有利に、アーチ8305a、8305bは、モーメントアームとして挙動でき、また、バランスがとれた状態において、付与された負荷の約半分を引き受けることができる。反対方向はまた、各アーチが反対方向における他方の運動を抑制するため、アンカーに付与される力を安定させるのに役立つ。
引っ張りループ8377は、アーチ8305a、8305bがステム8303で合流するように、アーチ8305a、8305bの間で延在してもよい。さらに、引っ張りループ8377は、アーチ8305a、8305bに向かって上方向に曲がる逆アーチ部8379a、8379bの側の両方に合流してもよい。逆アーチ部8379a、8379bのピークは、遠位側に且つ実質的に互いに正反対に放射方向に延在してもよい。さらに、逆アーチ部8379a、8379bは、アーチ8305a、8305bそれぞれから約90度離れた位置に配置されてもよい。この90度での配置により、アンカー8301の外周に90度ずつ間隔をあけて設けられたおおよそ4つの支持部が提供され、それにより、アンカー8301が安定し、アンカー8301の近位側への移動が阻止される。逆アーチ部8379a、8379bの両方は、アーチ8005a、8005bに接続するために、引っ張りワイヤ8377から同一の時計方向/反時計方向にループしてもよい(近位側端からアンカー見た場合)。
いくつかの実施の形態において、ステム8303、アーチ8305a、8305b、逆アーチ8379a、8379b、スパイン、および引っ張りループ7077は、ステムに結合される連続するピースのワイヤで形成されてもよい。ステム8303、アーチ8305a、8305b、逆アーチ8379a、8379b、スパイン、および/または引っ張りループ7077は、例えば、溶接、圧着、接着、はんだ、スリーブ、またはこれらの組み合わせによって結合されてもよい。
アンカーを取り除くために、引っ張りループ8377は、把持具等の後退ツールを用いて、内視鏡または取り除き用チューブ内に、近位方向に軸方向に引っ張られ得る「ハンドル」として機能することができる。引っ張りループ8377が近位側アンカーとは反対の方向に引っ張られると、アンカー部材8301は放射方向内側に折り畳まれる。逆アーチ8379a、8379bは、アーチが真っ直ぐになり、その上、折り畳まれるまで、アーチ8305a、8305bの上および周囲で持ち上がる。アンカー100は、有利には、食道を通って内視鏡ワーキングチャンネル、および/またはオーバーチューブ内へのデリバリーまたは後退のために折り畳まれ得る。
図11を参照すると、いくつかの実施の形態において、アーチ8305aおよび8305bは、アーチ8305a、8305bの遠位端に最も近い接続点1101aで一緒に結合されてもよい。図12を参照すると、他の実施の形態において、アーチ8305a、8305bは、0.5インチ〜1.0インチの距離Lだけアーチ8305a、8305bの端部から離れた接続点1101bで一緒に結合されてもよい。図12に示す距離の増加は、アーチ8305aと8305bとの間により大きなモーメントアームを有利に形成することができ、それによって引き抜き力を実質的に低下させることなく、アンカー100の可撓性(放射方向におけるアンカーの「圧潰性」等)が高められる。任意の個々のアーチ8305a、8305bの直径を減少させないようにしながら、アーチ8305a、8305bをはさみのように前後に動かすか、または互いに重複させることにより、引き抜き強度を最大化する一方で、胃の収縮中の組織相互作用を最小限に抑えるのに役立つ。さらに、接続点1101は、圧着されてもよく、溶接されてもよく、または別様に一緒に接続されてもよい。
デバイス20のスパイン50を形成するために使用されるワイヤは、0.04インチ未満、例えば、0.03インチ未満、0.02未満、または約0.018インチの直径を有することができる。0.04インチ未満の直径を使用することにより、有利には、スパイン50の剛性が高過ぎないことを確実にし、それによってアンカー100をスパイン50に対して移動させ、使用中に胃組織に対する持続的な圧力を回避するのに役立つ。
図7を参照すると、スパイン50の近位部30は、嵩高構成要素71を含んでもよい。スパイン嵩高構成要素71は、存在する場合、スパイン50の直径を増加させることができる。図55に詳細に示すように、スパイン嵩高構成要素71は、嵩高部71の遠位端と、完全に伸長した(膨張していない)シース201の近位端との間の空間が最小限に抑えられるように、スパイン50に沿ってステムの遠位端から遠位部85まで延在することができる。例えば、空間は、0.25インチ以下であってもよい。
図8A〜図8Bを参照すると、スパイン嵩高構成要素71は、螺旋状に切り込みの入ったポリエチレンテレフタレート(PET)チューブで形成されてもよい。嵩高構成要素71は、0.095インチの内径、0.125インチの外径、および0.05インチのピッチを有することができる。嵩高構成要素71は、スパイン50の残りの部分のより小さい直径のワイヤへの滑らかな移行を容易にするために、先細りになった遠位端を有することができる。スパイン嵩高構成要素71は、ステムのワイヤ結合部1101(図11〜図12を参照)またはワイヤ結合スリーブに取り付けることによって、近位方向の移動を防止する特徴を近位端にさらに有することができる。さらに、スパイン嵩高構成要素71は、一方の端部(先細り部等)または両方の端部でワイヤ82に取り付けられてもよく、それによって嵩高構成要素71の移動を防止する。スパイン嵩高構成要素71は、裸のワイヤ82に対する表面積の増加(すなわち、より少ない圧力を発生する)、およびその中に存在するワイヤの直径に対して適合が「緩過ぎること」に起因する損傷から幽門を有利に保護することができる(すなわち、ワイヤ82の直径は、構成要素71の内径よりはるかに小さくてもよい)。直径の差は、ワイヤ82が構成要素71内で自由に移動することを可能にし、曲げ性を向上させる。さらに、螺旋状の切り込みは、スパイン50の剛性に影響を及ぼすことなく可撓性を維持するのに役立つ。
同様に、アンカー100は、嵩高構成要素81を含むことができる。図9を参照すると、アンカー嵩高構成要素81は、螺旋状に切り込みの入ったポリエチレンテレフタレート(PET)チューブで形成されてもよい。アンカー嵩高構成要素81は、0.045インチの内径、0.065インチの外径、および0.050インチのピッチを有することができる。アンカー嵩高構成要素81は、引っ張りループ8377からステム8303まで、実質的にアンカー全体を覆うように延在することができる。
さらに、アンカー嵩高構成要素81は、一方または両方の端部でアンカー100に取り付けられてもよく、それによってアンカーの嵩高部を所定の位置に保持する。アンカー嵩高構成要素81は、螺旋状の切り込みに起因して、アンカーの剛性に影響を及ぼすことなく、裸のワイヤに対する表面積の増加(すなわち、より少ない圧力を生じること)に起因する損傷から胃組織を有利に保護することができる。螺旋状の切り込みはまた、各個々のコイルを、その中に存在するワイヤの曲線により厳密に沿わせることよって、アンカーの外径面を滑らかにするのに役立つ。
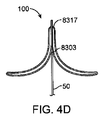
図47は、インサート120のより詳細な図を示す。インサート20と同様に、インサート120は、細長いスパイン50に沿って延在するスリーブ201から形成される流量減少要素200と、図8の形状のアンカー100とを含む。インサート120は、無傷ボール121を有する直線状の遠位端をさらに含む。端部およびボール121は、組織の損傷を防止するために、スパイン50と比較して増加または厚みのある直径を有することができる。
図48Aを参照すると、インサート120のスパイン50の近位部30は、嵩高構成要素71に類似する嵩高構成要素171を含むことができるが、0.05インチ〜0.25インチ、例えば、0.125インチ等のより大きいピッチの螺旋を含んでもよい。ピッチは、螺旋がそれ自体に乗り上げるのを避けるため(ピッチが小さ過ぎる場合)、および剛性を失うのを避けるために(ピッチが大き過ぎる場合)、具体的に選択することができる。さらに、嵩高部171は、約4インチの長さを有することができる。この嵩高部171は、嵩高部171の近位端からデバイスの遠位部または端部121までの長さが、幽門から十二指腸の第四部までの距離とほぼ等しくなるように配置されてもよく、そうすることにより、後に記載するように、嵩高部171がデリバリー中にマーカーとして使用され得る。同様に、図55を参照して上述したように、嵩高部171の遠位端は、完全に伸長した(膨張していない)シース201の遠位端と近位端との間の空間が最小限に抑えられるように配置されてもよい。
同様に、図48Aおよび48Bを参照すると、アンカー100は、嵩高構成要素181を含むことができる。嵩高構成要素181は、嵩高構成要素81に類似してもよいが、0.05インチ〜0.25インチ、例えば、0.125インチ等のより高いピッチの螺旋を含むことができる。さらに、嵩高構成要素181は、例えば、アーチ/逆アーチ領域の約2/3のみを覆うために、アンカー100をより少なく覆うことができる。アンカーの2/3を覆うことにより、引っ張りループを非被覆状態に維持しながら(把持しやすくするため)、且つステムに付加的な直径がほとんど加えられないことを確実にしながら(さもなければアーチの広がりの原因となり得る)、組織の損傷を防止するのに十分なワイヤの被覆率を提供することができる。
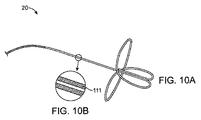
インサート20、120のスパインまたはアンカーに厚みを持たせるための別の一例の機構を、図10A〜図10Bに示す。この場合、ポリマー等の薄いコーティング111がスパインのワイヤに塗布される(同様のコーティングがアンカーに配置されてもよい)。スパインまたはアンカーに厚みを持たせるためのさらに別の機構を、図10Cに示す。この場合、インサートのアンカーの全体的な直径を増加させるために、より厚みのある(または太い)ワイヤ113が使用される。同様の太い部分が、スパインのワイヤに沿って配置されてもよい。
図49を参照すると、インサート120(またはインサート20)は、消化管内へのインサートの配置を補助するように構成される、1つまたはそれ以上のマーカーをさらに含んでもよい。したがって、図49に示すように、マーカー222は、シース201の下に延在することができる。マーカー222は、例えば、スパイン50のワイヤ上の色付きまたはテクスチャ付きのチューブであってもよい。マーカー222の長さは、消化管内の所望の解放位置に対応し得る。例えば、マーカー222は、約8cmの長さであってもよい。以下にさらに説明するように、マーカー222の近位端は、十二指腸の第四部から十二指腸の第三部までの距離に対応するように遠位端121から離れた距離であり得る。
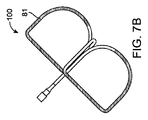
図5A〜図5Bを参照すると、インサート20または120に使用される引っ張りループ8377は、1/2の巻き(8377a)または1/2より多くの巻き(8377b)、例えば、1と1/2の巻きを含むことができる。1/2より多くの巻きを有することにより、引っ張りループ8377aは、引き抜き力を実質的に減少させることなく、アンカー100の放射方向における可撓性を高めるためのトーションばねとして機能することができる。放射方向の可撓性(引っ張りループが上から押されたときに広がる能力)が高まることで、近位方向から遠位方向へと胃が収縮する際の組織相互作用を最小限に抑えるのに役立ち得る。1/2より多くの巻きを有することによっても、引っ張りループの耐久性を高めることができ、デリバリーおよび後退の間等に、引っ張りループにかかるトルクをより長い距離に沿って分散させることが可能である。引っ張りループ8377は、0.10インチ〜0.20インチ、例えば、0.14インチの距離uを有することができる。
図6A〜図6Bを参照すると、インサート20または120のための引っ張りループ8377は、同様に、可撓性を高めるために近位端の薄肉部(8377c)、または強度を高めるために近位端の厚肉部(8377d)を含むことができる。例えば、ワイヤは、引っ張りループ8377cにおいて0.035インチから0.018インチに薄肉化されてもよく、または引っ張りループ8377dにおいて0.035インチから0.042に厚肉化されてもよい。
アンカー100は、幽門に対して垂直な胃内に配置されたときに、アンカー100が幽門を通過できないような全径を有することができる。例えば、アンカー100は、2.5インチ〜3.5インチ、例えば、約3インチの直径を有してもよい。したがって、近位側アンカー100は、ひとたび内視鏡を通してデリバリーされ、胃内で展開されると、膨張して、アンカーが幽門を通過するのを防止する十分に大きい構造を提供するように適応および構成される。
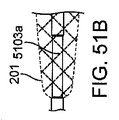
いくつかの実施の形態において、スパインを作製するために使用されるワイヤは、他の要素との接着を容易にするために、特別に配置された突起および/または溝を含むことができる。例えば、図51を参照すると、インサート20(または120)を形成するために使用されるワイヤ82は、遠位ボール121の接着を容易にするために、その遠位端に直径の大きな突起5101を有することができる(図51Aを参照)。さらに、ワイヤ82は、スリーブ201の遠位端の接着を容易にするようにデザインされた溝5103aを有することができる(図51Bを参照)。同様に、ワイヤ82は、ストッパ59の接着を容易にするようにデザインされた溝5103bを含むことができる(図51Cを参照)。ワイヤ82はまた、スパイン嵩高構成要素71の遠位端の接着を容易にするようにデザインされた溝5103cも含むことができる(図51Dを参照)。いくつかの実施の形態において、スパイン嵩高部の近位端および/またはアンカー嵩高部の一方もしくは両方の端部の取り付けのために、付加的な溝が使用されてもよい。突起および溝は、0.001インチ〜0.002インチ、例えば、0.0015インチ等の直径における変化を提供することが可能であり、接着剤または粘着剤に接合または凝固するための周辺領域を与えることができ、それによってボール、スリーブ、ストッパ、および嵩高部等のより良好な固定特徴部をワイヤ82に与えることができる。
有利には、本明細書に記載される特徴部を有するインサート20、120は、トーションばねのデザインの引っ張りループ、可撓性ワイヤの小さい直径、図8のデザイン、螺旋状に切り込みの入った嵩高構成要素、および/またはワイヤ結合部からアーチまでの距離に起因する、放射方向の圧縮、軸方向の圧縮、および屈曲に関して柔軟なデザインを有することができる。この柔軟性は、インサート20が所定の位置にあるときに組織相互作用を防止または軽減することができる。同時に、インサート20は、アンカー100の図8のデザインに起因して、例えば、約3.8lbの、3.5lbを超える高い引き抜き強度(すなわち、幽門通過に対する抵抗性)を有することができる。
インサート20、120は、アンカーを真っ直ぐにして、直接ツールを用いて、食道内、内視鏡のワーキングチャンネル内、またはオーバーチューブ内にインサートを引っ張ることまたは押すことによってデリバリーされてもよい。
インサート20、120等の管腔内デバイスのための一例のデリバリーシステムを、図13〜図18に示す。デリバリーシステムは、互いに且つ内視鏡と相互接続するように構成される、装填ツール1300、イントロデューサ1700、およびアダプタ1400を含むことができる。
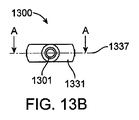
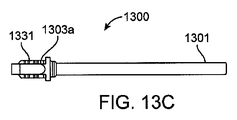
図13A〜図13Dは、デリバリーシステムの装填ツール1300を示す。装填ツール1300は、その中を通ってインサート20が適合するように構成される中空の細長い本体1301と、その遠位端のコネクタ1331とを含む。コネクタ1331は、管状部材1301の遠位端が通過する中央延在部1333を含む。コネクタ1331は、コネクタ1331の外周から遠位に延在する嵌合アーム1303a、1303bをさらに含む。最後に、ピン1317a、1317bが、コネクタ1331から遠位に延在する。ピン1317a、1317bは、互いにオフセットしていてもよく、したがって、中心軸1337の両側に位置する(図13Bを参照)。細長い本体1301は、内視鏡のワーキングチャンネル、例えば、直径3.7mmのワーキングチャンネル内に適合するようにデザインされた管腔内デバイスをデリバリーすることができるように、約0.1〜0.2インチ、例えば約0.148インチの内径を有してもよい。
図17は、デリバリーシステムのイントロデューサ1700を示す。イントロデューサ1700は、デリバリーシステム内に配置されたときに停止部として機能するハブ1705と、そこから延在するシャフト1707とを有する。図46を参照すると、シャフト1701は、内視鏡4600のワーキングチャンネルフランジ4607の内腔4609を通って延在するように構成される。シャフト1707の長さは、シャフト1707を通して内視鏡4600のワーキングチャンネル4605に沿って(逆方向に内視鏡の近位端4601から出るのではなく)管腔内デバイスの前進を促進するために選択されてもよい。したがって、シャフト1707は、ワーキングチャンネル4605の後部の丁度手前で終端するようなサイズであってもよい。例えば、シャフト1707は、約2.75インチの長さを有することができる。さらに、遠位シャフト先端部1703は、角度を成して、例えば、約45度の角度等に切り取られてもよい。
図17に戻って参照すると、ピン1701は、ハブ1705から遠位に延在することができる。再び図46を参照すると、ピン1701は、アダプタ1400と相互作用したときに、長い端部が内視鏡4600のハンドルの近位端4601に面する一方で、短い開放端部が内視鏡4600の遠位端4603に面するように傾斜先端部1703が延在するように配置されてもよい。この方向付けは、内視鏡ワーキングチャンネル4605に沿ったインサートまたはデバイスの前進を容易にするのに役立ち得る。シャフト1707の外径は、可能な限り大きなサイズであってもよいが、なおもワーキングチャンネルフランジ4607の内腔4609に適合し、シャフト1707の内径は、ワーキングチャンネル4605の直径と一致するようなサイズであってもよい。有利には、イントロデューサ1700の直線状シャフト1707は、直径およびサイズが異なり、さもなければデリバリー中にデバイスがひっかかる原因となり得る管腔内デバイスを、内腔4609を通してデリバリーするのに役立ち得る。
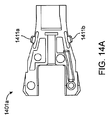
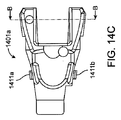
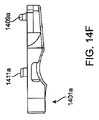
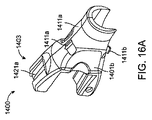
図14A〜図16Bは、アダプタ1400の第1および第2の嵌合部1401a、1401bを示す。嵌合部1401a、1401bは、タブ1411a、1411bを使用して、内視鏡ハンドル4601上、および内視鏡4600のハンドル上のワーキングチャンネルフランジ4607(図46を参照)の周囲に一緒にスナップ係合するように構成される。一方の嵌合部1401a、1401b上の相互連結特徴部または突起1409a〜1409cは、反対側の嵌合部1401a、1401b上の対応する特徴部と相互連結するように構成され得る。一緒にスナップ係合される場合、アダプタ1400は、イントロデューサ1700のシャフト1707が通過できるように構成されるボア1405aを含む。一緒にスナップ係合される場合、アダプタ1400は、イントロデューサ1700のピン1701と嵌合するように構成されるボア1405bをさらに含む。この嵌合は、イントロデューサ1700の位置を内視鏡ハンドルに対して適所に保持することができるだけではなく、(突起1409bを通してピン1701を延在させることによって)嵌合部1401aおよび1401bを一緒に係止することもできる。一緒にスナップ係合される場合、アダプタ1400は、装填ツール1300のアーム1303a、1303bと嵌合するように構成されるトラック1421a、1421bをさらに含む。同様に、一緒にスナップ係合される場合、アダプタ1400は、装填ツール1300上のピン1317a、1317bと嵌合するように構成されるボア1413a、1413bを含む。この嵌合は、係止チューブ1300の位置を適所に保持することができるだけではなく、(突起1409a、1409cを通してピン1317a、1317bを延在させることによって)嵌合部1401aおよび1401bを一緒に係止することもできる。
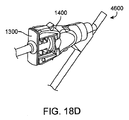
デリバリーシステムの要素の相互接続を、図18A〜図18Dに示す。図18Aを参照すると、ワーキングチャンネルフランジ4607(内視鏡4600のハンドル上に位置する)の内腔からガスケットが取り除かれる。図18Bを参照すると、アダプタ1400の嵌合部1401a、1401bは、内視鏡ハンドルの上、且つ内視鏡ハンドルのワーキングチャンネルフランジ4607の端部周囲に一緒にスナップ係合される。図18Cを参照すると、次いで、イントロデューサ1700が、シャフト1707がワーキングチャンネルフランジ4607の内腔4609の長さに沿ってY接続部(図46Aに示す)まで延在するようにアダプタ1400内に配置される。さらに、傾斜先端部1703は、インサート20が内視鏡ワーキングチャンネル(図46に示す)に沿って遠位に延在せずに近位に曲がることを阻止するように、内視鏡のワーキングチャンネル内に延在する。最後に、装填ツール1300は、インサート20を内視鏡ハンドル内に前進させるときに、安定な、良好に整列したインサート20の経路を提供するように、アダプタ1400と嵌合することができる。装填ツール1300、アダプタ1400、およびイントロデューサ1700と、内視鏡4600との相互連結は、互いにおよび内視鏡とのロバストな接続を提供することができる。このロバストな接続は、有利には、ユーザ、例えば、医師が、デリバリー中にデリバリーシステムに影響を与えうる、てこの作用を抑制することができる。
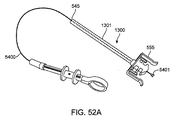
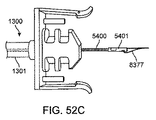
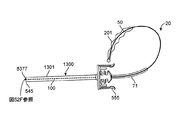
図52A〜図52Fを参照すると、インサート20(または120)等のインサートを、デリバリーシステムに装填することができる。図52Aに示すように、把持具5400は、最初に、ツールの近位端545からツールの遠位端555までデリバリーツール1300のシャフト1301に装填されてもよい。把持具5400は、把持部5401がデリバリーツール1300の遠位端555から出て延在するように配置されてもよい。さらに、図52Bおよび図52Cに示すように、引っ張りループ8377は、把持部5401が引っ張りループ8377を把持できるように、インサート20のスパインから離れるように引っ張られてもよい。図52Dに示すように、次いで、アーチおよび逆アーチを真っ直ぐにするかまたはほどくために、アンカー100を緩やかに伸ばすことができる。図52Eおよび図52Fを参照すると、次いで、アンカー100が完全にシャフト1301内に入り、引っ張りループ8377が、例えば、約5mm未満の距離だけシャフト1301の近位端545から出て延在するまで、伸ばしたアンカー100の上で装填ツール1300を引っ張ることができる。図54Eに示すように、インサート20のスパイン50および遠位端は、主として装填ツールの遠位端555の外側に残る。インサート20は、次いで内視鏡内に装填できる状態にある。
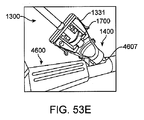
図53A〜図53Eを参照すると、次いで、デリバリーのために内視鏡を準備することができる。最初に、また図53Aに示すように、アダプタ1400の1つの部分1401aが、ワーキングチャンネルフランジ4607上に配置されてもよい。図53Bに示すように、次いで、第2の部分1401bが、ワーキングチャンネルフランジ4607の反対側に配置され、第1の部分1401aと一緒にスナップ係合されてもよい。図53Cを参照すると、次いで、ピン1701を嵌合ボア1405bに位置決めすることによって、イントロデューサ1700がアダプタ1401内に配置されてもよい。イントロデューサ1707は、ハブ1705がアダプタ1400と同一平面上になるように(また図46Aに示すように、傾斜先端部がワーキングチャンネル4605内に延在するように)配置されてもよい。図53Dを参照すると、次いで、スパイン50(図52Eに示すように、ワーキングツールの遠位端555から出て延在している)は、イントロデューサ1700のシャフト1707内に(したがって、アダプタ1400の内腔1405aを通って)デリバリーされるために真っ直ぐにされてもよい。次いで、インサート20のアンカー100をなおも装填ツール1300内に維持しながら、スパイン50の遠位端が、イントロデューサ1700のシャフト1701内に装填されてもよい。シャフト1707内にインサート20を適合させる補助となるように、装填中に、シース201が緩やかに近位に引っ張られてもよい。インサート20の遠位端は、図53Eに示すように、装填ツール1300が、コネクタ1331を介してアダプタ1400上にスナップ係合されるまで装填されてもよい。
図54を参照すると、ひとたび装填ツール1300がアダプタ1400上にスナップ係合されると、小腸等へのデリバリーのために、プッシャー5300を使用して、イントロデューサを通して内視鏡のワーキングチャンネル4605内に引っ張りループ8377の近位端を押すことができる。装填ツールは、内視鏡に至るまでインサートを押す前に取り除かれてもよい。
インサート20を小腸内に配置するために、インサート上のマーカーが使用されてもよい。例えば、内視鏡は、十二指腸の第三部の遠位端にデリバリーおよび配置されてもよい。次いで、プッシャー5300を使用してインサート20をワーキングチャンネルの外に押すことによって、インサート20を十二指腸の第四部内に前進させることができる。インサート20は、マーカー222(図49を参照)が内視鏡で確認できなくまるまで、すなわち、インサートが約10cm内視鏡から出るように、前進させることができる。ひとたびマーカーによってインサート20の遠位端が十二指腸の第四部内に配置されたことが示されると、インサート20を十二指腸内に残したまま(すなわち、内視鏡を取り除くときと同じ速度でプッシャー5300を押すことによって)、内視鏡を近位に引っ張ることができる。したがって、インサート20のより近位の部分が展開される。スパイン嵩高部71が見られたら、内視鏡の近位方向への後退を停止することができ、内視鏡を使用して、嵩高部71の近位端が幽門のすぐ遠位の十二指腸球部にあることを確認することができる。嵩高部71の近位端が、十二指腸球部の遠位である十二指腸の第二部にある場合、内視鏡およびインサート20を球部内に一緒に後退させることができる。嵩高部71の近位端が幽門の近位の胃内においてのみ見える場合は、デバイスが近位過ぎることを示しており、内視鏡およびインサート20の両方を取り除く必要があり得る。嵩高部71が球部内にあると想定される場合、内視鏡の後退およびデバイスの前進は、胃前庭部が見られるまで継続することができる。胃管腔内の観察から嵩高部71が正しい位置にあること(および幽門を横断して延在すること)が確認される場合、内視鏡を所定の位置に保持し、アンカー100を適所に置くようにプッシャー5300を前進させることによって、インサートを完全に展開することができる。アンカーが胃内に存在し、嵩高部71が幽門を横断し、スパイン50が十二指腸内にあるようにデリバリーされると、内視鏡を取り除くことができる。
いくつかの実施の形態において、プッシャー5300(図50および図54に示す)は、引っ張りループ8377との係合を最大化するために、引っ張りループ8377の近位端と密接に合致または一致するように構成される遠位端5301を有することができる。したがって、遠位端5301は、図50にさらに示すようにカップ形状を有してもよい。さらに、プッシャー5300の長さ中央部5303は、可撓性を高め、且つワーキングチャンネル4605内の摩擦を軽減するために、小さい直径を有してもよい。
有利には、医師は、本明細書に記載されるデリバリーシステムを使用して、他の医療技術者からの付加的補助なしで、または最低限の補助のみで、インサート20をデリバリーすることができ、例えば、インサート20は、内視鏡を保持するために片手のみ、またデバイスをデリバリーするために片手のみを使用してデリバリーされ得る。さらに、本明細書に記載されるデリバリーの方法は、有利には、剛性または可撓性である内視鏡とともに、また胃内視鏡または結腸鏡とともに使用されてもよい。さらに、インサートは、十二指腸の第四部に到達するために内視鏡を必要とせずに十二指腸の第四部にデリバリーされ得るため、本方法は、より広範囲の内視鏡を用いて、より容易に且つよりうまく行うことができる。
さらに、インサート20は、図19〜図20Cに示す取り除き用チューブ1900等の取り除き用チューブを使用して取り除かれてもよい。取り除き用チューブ1900は、細長い部材1901、ハブ1903、およびガスケット1905を含むことができる。細長い部材1901は、内視鏡に適合するように構成されてもよく、ガスケット1905は、胃を膨張した状態で維持することを確実にするために、内視鏡の外径と細長い部材1901の内径との間のスペースをシールするように構成されてもよい。胃の膨張は、可視化を容易にし、且つ組織損傷を最小限に抑えるように組織を外側に移動させることにより、胃内内視鏡処置を容易にする。さらに、ハブ1903は、患者の喉を通って取り除き用チューブが不用意に移動するのを防止するようなサイズであってもよく、患者に固定できる(テープを介して等)切り抜き特徴部1927a、1927bを含むことができる。
インサート20(または120)を取り除くために、内視鏡を胃の中に配置し、ガイドワイヤをデリバリーすることができる。ひとたびガイドワイヤの遠位先端部が内視鏡から出ると、胃内に2〜3個のコイルが形成されるまでガイドワイヤを胃の中に前進させることができる(これらのコイルは、ガイドワイヤを固定する際の補助となり得る)。次いで、内視鏡を取り除くことができる。取り除き用チューブ1900は、その中の拡張器とともに、ガイドワイヤ上に配置されてもよく、また食道を通してインサートの近位端に配置されてもよい。次いで、取り除き用チューブ1900を所定の位置に残したまま、拡張器およびガイドワイヤが取り除かれてもよい。代替として、取り除き用チューブ1900は、ガイドワイヤを使用せずに、内視鏡の上に直接配置されてもよい。膨張を維持するのに役立つガスケット1905を使用して、必要に応じて胃を膨張させることができる。把持具は、内視鏡のワーキングチャンネルを通して延在させることができる。インサートの引っ張りループまたはアンカー100の他の部分は、把持具を用いて把持することができる。さらに、把持具が内視鏡の遠位端に向かって近位に引っ張られている間に、内視鏡を所定の位置に保持することができる。次いで、少なくともインサートの近位側アンカー部分、例えば、約6.5インチが取り除き用チューブ1900内に後退されるまで、把持具および内視鏡の両方を取り除き用チューブ内に引き出すことができる。ひとたびインサートの近位側アンカー100が取り除き用チューブ1900内に入ると、内視鏡、把持具、および取り除き用チューブ1900を一緒に後退させることができる。
上述のように、本明細書に記載されるインサートは、有利には、消化管におけるインサートの位置を維持するのに十分な引き抜き力を提供する一方で、組織を実質的に刺激、切断、または損傷しないように十分可撓性であり得る。図21A〜図26は、引き抜き強度を維持しながら、スパイン50の可撓性または柔軟性を提供するのに役立つように、本明細書に記載されるあらゆる特徴部と組み合わせて、またはそれらの代わりに使用することができる付加的な特徴部を示す。
例えば、図21は、引き抜き力を維持しながら可撓性を高めるために、アンカー100のすぐ遠位に圧縮ばね2101を含むインサート2100を示す。同様に図22は、引っ張りばね2201を含むインサート2200を示す。
図23A〜図23Dは、アンカー100のすぐ遠位に平行に延在する複数のワイヤストランド2301を含むデバイス2300を示す。ワイヤストランド2301は、外周の周囲に配置され、有利には、アンカー100とスパイン50との間に屈曲性および可撓性を提供することができる。圧着部2303a、2303bは、個々のワイヤストランド2301を拘持し、ストランド2301をアンカー100およびスパイン50に接続する。
図24は、アンカー100とスパイン50との間に、胃に対してスプリングフィードバックすることなく有利に屈曲することができるチェーンリンク2401を含むインサート2400を示す。チェーンリンク2401は、チューブ内に拘束されると線形圧縮力を伝達することができる。これにより、内視鏡を通して胃および十二指腸にインサート2400を有利に装填することができる。チェーンは、1つまたはそれ以上のリンクからなってもよい。一例のチェーンおよびリンクを、図25A〜図25Dに示す。図25Aは、リングおよびポストの単一のリンク2501を示す。図25Dは、一緒に接続されたリングおよびポストの複数のリンク2501a、2501bを示す。図25Cは、複数のリング2503を示す。図25Dは、一緒に接続されたボール2505およびチェーン2507を示す。図25Dのボールおよびチェーンのデザインは小さく曲がることができ、導入および配置を制御するために有利であり得る。このデザインはまた、自由に旋回することができ、近位側アンカー100が回転することを可能にする。図25A〜図25Dに示す種々のチェーンリンクは、圧着または他の接続機構によってアンカー100およびスパイン50に接続することができる。
図26は、アンカー100とスパイン50との間にケーブル2601を含むインサート2600を示す。ケーブル2601は、圧着等によって結合部2603a、2603bでアンカー100およびスパイン50に接続されてもよく、また有利には、高い可撓性を提供することができる。
図27A〜図38Eは、代替のアンカーのデザインが、単独で、または本明細書に記載される他の特徴と組み合わせて、同様に所望の可撓性および引き抜き力を提供できることを示す。
例えば、図27A〜図27Dのアンカー2700は、スパイン2703の片側の単一の逆アーチ2705によって一緒に接続された2つのアーチ2701a、2701bを含む。別の一例のアンカー2800を、図28A〜図28Fに示す。アンカー2800は、外周の約3/4の周囲に一緒に接続された2つのアーチ2801a、2801bを含む。図30は、実質的に平面である図8の構造を有するアンカー3000を示す。アンカー3000は、形状を維持するためにワイヤに係合するように構成されるラッチ3001を含むことができる。柔らかく、屈曲可能な引っ張り部またはヒンジ3003は、有利には、可撓性を高めることができる。図31A〜図31Eは、環状基部3103および垂直なピグテール特徴部3101を有するアンカー3100を示す。図32A〜図32Cは、別のアンカー3200を示す。アンカー3200を形成するワイヤは、急カーブを有するように示されているが、アンカー3200はまた、同じ形状であるが丸みを帯びた特徴を有してもよい。
図29は、胃4内にある一例の編組型近位側アンカー2900を示す。アンカー2900は、胃4内で組まれた足場のように挙動する大きな編組として構築されてもよい。アンカー2900は、胃または胃のほんの一部を実質的に占めることができる。図33は、一例の帽子型アンカー3300を示し、図34および図35は、一例のカラーアンカー3400を示す。アンカー3300、3400は、例えば、編組材料でできていてもよい。
図36A〜図36Cは、遠位端から近位端まで広がる螺旋状ワイヤ特徴部3701を含む一例のアンカー3700を示す。いくつかの実施の形態において、アンカー3700は、螺旋状ワイヤ特徴部3701の一部または全てを覆う編組3707を含むことができる。図37A〜図37Cは、部分的に折り畳まれたかさに似た様式で延在するスパイン3701を有するアンカー3700の別の実施の形態を示す。図38A〜図38Eは、ほぼ四葉のクローバーの形状に形成されたワイヤでできた別の一例のアンカー3800を示す。
図39および図40は、前述の嵩高構成要素の代替例を示す。すなわち、図39は、損傷から組織を保護するために嵩高部を提供するようにデザインされたワッシャー3901を含むインサート3900を示す。図40は、同様に損傷から組織を保護するために使用することができる引き締め可能なバッグ4001を含むインサート4000を示す。
図41Aおよび41Bは、ワイヤ結合部4101が軸方向に拘束されているが、別様に回転することが可能な代替のアンカー4100を示す。すなわち、カラー4101をワイヤ4103のうちの1つに圧着することができ、第2のワイヤ4104をそこで自由に回転させることができる。このデザインは、デリバリー中のアンカーのワイヤの絡まりまたはねじれを有利に抑制することができる。
図42は、回転要素4201で、デバイスの残りの部分に対して自由に回転することができ、同時に絡まりに役立つアンカー4201を示す。同様に、図43は、引っ張りループ4377が中央で分割され、さらなる運動の自由を可能にし、絡まりを軽減することができるアンカー4300を示す。
図44は、球状の毛糸玉に類似するように形成されたアンカー4400を示し、図45は、バルーンで形成されたアンカー4500を示しており、これらは両方とも、有利には組織損傷を軽減することができる。
これらのアンカーのデザインのいずれも、インサート20、120に関連して上述したアンカー100とともに、またはそれに加えて使用することができる。
別段の定義がない限り、本明細書で使用されている全ての技術的用語は、消化器インターベンション技術の当業者によって通常理解されるものと同一の意味を持つ。本願には特定の方法、デバイス、および材料が記載されているが、本明細書に記載されているものと類似または等価の任意の方法および材料が本発明の実行に使用されてもよい。本発明の実施の形態が例示的な図面を用いて詳細に説明されているが、このような図面は理解を明確にするためのものであって、限定を目的としていない。さらに、本発明は、例示の目的で説明された実施の形態に限定されず、本願に添付されたクレームを公正に読み取ることによってのみ定義され、その構成要素それぞれに与えられた幅広い同等物を含んでいる。