JP2017518913A - Method and apparatus for improving safety during vehicle overtaking process - Google Patents
Method and apparatus for improving safety during vehicle overtaking process Download PDFInfo
- Publication number
- JP2017518913A JP2017518913A JP2016563160A JP2016563160A JP2017518913A JP 2017518913 A JP2017518913 A JP 2017518913A JP 2016563160 A JP2016563160 A JP 2016563160A JP 2016563160 A JP2016563160 A JP 2016563160A JP 2017518913 A JP2017518913 A JP 2017518913A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- traveling
- overtaking
- speed
- lane
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/14—Adaptive cruise control
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W30/00—Purposes of road vehicle drive control systems not related to the control of a particular sub-unit, e.g. of systems using conjoint control of vehicle sub-units, or advanced driver assistance systems for ensuring comfort, stability and safety or drive control systems for propelling or retarding the vehicle
- B60W30/18—Propelling the vehicle
- B60W30/18009—Propelling the vehicle related to particular drive situations
- B60W30/18163—Lane change; Overtaking manoeuvres
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/40—Dynamic objects, e.g. animals, windblown objects
- B60W2554/404—Characteristics
- B60W2554/4041—Position
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2554/00—Input parameters relating to objects
- B60W2554/80—Spatial relation or speed relative to objects
- B60W2554/801—Lateral distance
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60W—CONJOINT CONTROL OF VEHICLE SUB-UNITS OF DIFFERENT TYPE OR DIFFERENT FUNCTION; CONTROL SYSTEMS SPECIALLY ADAPTED FOR HYBRID VEHICLES; ROAD VEHICLE DRIVE CONTROL SYSTEMS FOR PURPOSES NOT RELATED TO THE CONTROL OF A PARTICULAR SUB-UNIT
- B60W2555/00—Input parameters relating to exterior conditions, not covered by groups B60W2552/00, B60W2554/00
- B60W2555/60—Traffic rules, e.g. speed limits or right of way
Abstract
その走行速度(V)がACCシステムによって帰還制御されている車両(1)の追越プロセスにおける安全性を高める、以下のステップを包含することを特徴とする方法と装置:車両(1)が、少なくとも一台のある車線の前方を走行している車両(3; 5; 7; 8)を、ある追越プロセスにおいて、追い越す可能性がある潜在的追越シチュエーションを認識するステップ(S1);車両(1)が、合法的に前方を走行中の車両(3; 5; 7; 8)を追い越せる場合、自分の追越プロセスを加速する、並びに、車両(1)が、前方を走行中の車両(3; 5; 7; 8)を非合法的に追越しそうな場合、或いは、前方を走行中の車両の追越プロセスを可能にするために自分の追越プロセスを阻止するステップ(S2)。(図1)A method and apparatus comprising the following steps for increasing safety in an overtaking process of a vehicle (1) whose travel speed (V) is feedback controlled by an ACC system: Recognizing a potential overtaking situation (S1) that may overtake a vehicle (3; 5; 7; 8) in front of at least one lane in a certain overtaking process; If (1) can overtake a vehicle (3; 5; 7; 8) that is legally traveling ahead, it accelerates its own overtaking process, and vehicle (1) is traveling forward (3; 5; 7; 8) if it is likely to be illegally overtaken, or block the own overtaking process to enable the overtaking process of a vehicle traveling ahead (S2). (Figure 1)
Description
本発明は、その走行速度がACCシステムによって帰還制御されている車両の追越(追抜)プロセスにおける安全性、及び/或いは、快適性を向上するための方法、及び、装置に関する。 The present invention relates to a method and an apparatus for improving safety and / or comfort in an overtaking (overtaking) process of a vehicle whose traveling speed is feedback controlled by an ACC system.
車両は、ますます、車間調整クルーズコントロール、アダプティブ・クルーズコントロール、ACCシステムを装備するようになってきている。ACCシステムでは、前方を走行中の車両の位置及び速度が、ACCシステムを装備している車両のセンサーによって捕捉され、ACCシステムを装備している追従している車両の速度及び間隔が、エンジンとブレーキへの介入によってアダプティブに帰還制御される。間隔測定には、例えば、レーダーシステム、或いは、所謂、ライダーシステムを使用することができる。該ACCシステムは、長距離走行、特に、アウトバーンや混雑した市街地での走行時における乗り心地の向上、並びに、ドライバーの集中力の負荷を軽減することに役立っている。ACCシステムが装備された車両のセンサーユニットは、該センサーユニットの捕捉範囲(視野領域)内、例えば、到達半径と開口角度からなる円弧内にある前方を走行中の車両を捕捉する。従来のACCシステムは、ACCシステムを装備した車両前方の走行チューブ(進路)内、乃至、センサーユニットの視野領域内にある前方を走行中の車両に反応する。例えば、片側二車線のアウトバーンにおける追越シチュエーションでは、隣の車線を走行している車両も考慮することが必要である。しかし、従来のACCシステムは、追越シチュエーションにおいて弱点を有している。 Vehicles are increasingly equipped with inter-vehicle cruise control, adaptive cruise control, and ACC systems. In the ACC system, the position and speed of a vehicle traveling ahead is captured by sensors of a vehicle equipped with the ACC system, and the speed and spacing of the following vehicle equipped with the ACC system is Adaptive feedback control is performed by intervention of the brake. For example, a radar system or a so-called rider system can be used for the distance measurement. The ACC system is useful for improving riding comfort and reducing driver's concentration load during long-distance driving, particularly in an autobahn or crowded urban area. A sensor unit of a vehicle equipped with the ACC system captures a vehicle traveling in front of the sensor unit in a capturing range (viewing field region), for example, an arc having an arrival radius and an opening angle. The conventional ACC system responds to a vehicle traveling in the traveling tube (path) ahead of the vehicle equipped with the ACC system or in the field of view of the sensor unit. For example, in an overtaking situation in a two-lane autobahn, it is necessary to consider a vehicle traveling in the adjacent lane. However, the conventional ACC system has a weak point in the overtaking situation.
例えば、ACCシステムを装備した車両が、(注:以下、全て右側通行のケースで説明される)片側二車線のアウトバーンの左車線を、ACCシステムにセットした設定速度Vset以下の速度で走行しており、該車両が、該シチュエーションにおいてアウトバーンの左車線から右車線に車線変更した場合において、ACCシステムを装備した車両のその時点の速度が、左車線上の前方を走行中の車両の速度よりも早い場合、該左車線上の前方を走行中の車両を意図せず右側から追い越すことが起こり得る。このような交通シチュエーションは、相対的にゆっくりと走っている前方を走行中の車両が、左車線にあり、例えば、更に早く走行している車両が、左車線後方から、ACCシステムを装備した車両に接近し、これを、該ACCシステムを装備した車両のドライバーが、例えば、バックミラー内に、気付いたケースなどにおいて、該ACCシステムを装備した追従している車両のドライバーが、その時点の交通シチュエーションを考慮して、右側通行原則を守ろうとした場合など、交通量が少ない時に起こり得る典型的な状況である。この様なケースでは、該ドライバーは、後ろを高速で走行している第三の車両を通過させるために右側車線に車線変更するが、この際に、左車線前方を低速で走行している車両を意図せずに右車線において追い越すことが起こり得る。 For example, a vehicle equipped with an ACC system travels in the left lane of an autobahn with one side of two lanes (note: all described below in the case of right-hand traffic) at a speed below the set speed V set set in the ACC system When the vehicle changes lanes from the left lane of the autobahn in the situation to the right lane, the speed at that time of the vehicle equipped with the ACC system is higher than the speed of the vehicle traveling in the front on the left lane. If it is earlier, it may happen that the vehicle traveling in front of the left lane is unintentionally overtaken from the right side. In such a traffic situation, a vehicle that is traveling relatively slowly in the front is in the left lane, for example, a vehicle that is traveling earlier is equipped with an ACC system from the rear of the left lane. The driver of the vehicle equipped with the ACC system, for example, in the case that the driver of the vehicle equipped with the ACC system notices in the rearview mirror, the driver of the vehicle following the vehicle equipped with the ACC system This is a typical situation that can occur when the traffic volume is low, such as when trying to follow the right-hand traffic principle in consideration of the situation. In such a case, the driver changes the lane to the right lane in order to pass the third vehicle traveling at a high speed behind, but at this time, the vehicle traveling at a low speed in front of the left lane. It is possible to overtake in the right lane unintentionally.
従来のACCシステムが、弱点を露呈する更なる追越シチュエーションとしては、例えば、片側二車線のアウトバーンにおいて、左車線に車両の列が形成され、該車列の右側の右車線が、比較的空いており、数台の、特に貨物車両など、低速車両が、互いに大きな車間を保ちながら走行している様な交通状況が挙げられる。この走行状況では、車両のドライバーにとっては、比較的空いている右車線に移動することが、走行中、それほども集中しなくても良く、且つ、車両の速度は、左車線と比べて、僅かにゆっくりとなるに過ぎないため、快適である場合が多い。この様な状況から、左車線を走行している車列を、意図せず、右側追抜してしまうことが起こり得る。 As a further overtaking situation in which the conventional ACC system exposes weaknesses, for example, in a one-sided two-lane autobahn, a vehicle row is formed in the left lane, and the right lane on the right side of the lane is relatively empty. There are several traffic situations, such as several low-speed vehicles, especially freight vehicles, traveling with a large distance between them. In this driving situation, it is not necessary for the driver of the vehicle to move to the relatively free right lane while driving, and the vehicle speed is slightly lower than that of the left lane. Because it only slows down, it is often comfortable. From such a situation, it may happen that the vehicle train traveling in the left lane is unintentionally overtaken on the right side.
従来のACCシステムが、弱点を露呈する三番目の追越シチュエーションとしては、短期的に片側二車線のアウトバーンの右車線を走行し、前方を走行している貨物車両に接近したために左車線に出て来る車両を追い越すような状況が、挙げられる。 The third overtaking situation in which the conventional ACC system reveals weaknesses is that it travels in the right lane of a two-lane autobahn on a short-term basis and approaches the freight vehicle traveling in the front, leaving the left lane. A situation that overtakes an incoming vehicle.
従来のACCシステムが、弱点を露呈する更なる重要な追越シチュエーションとしては、片側二車線の道路、例えば、アウトバーンにおいて、僅かにだけゆっくりと走行している、有意にゆっくりと走行している、例えば、貨物車両である車両に後ろから接近している車両を追い抜こうとしている従来のACCシステムを装備した車両がとり得る比較的顧慮の無い挙動を挙げることができる。このようなゆっくりとした追越プロセスは、右車線を略同じ速度で走っている該車両が、左車線への車線変更をできない、或いは、そのリスクが非常に大きいために、前を走っている貨物車両への追突を回避するために、強くブレーキをかけなければならないと言った状況を招く。このような強制された制動は、前方を走行中の車両のドライバーにとって、不愉快なだけでなく、不必要に走行速度を落とさせることになる。これにより、道路の流れも、有意に減速される。 A further important overtaking situation where the conventional ACC system exposes weaknesses is that it is running slightly slowly on a two-lane road, such as an autobahn, significantly slower. For example, a relatively inconspicuous behavior that can be taken by a vehicle equipped with a conventional ACC system that attempts to overtake a vehicle that is approaching from behind a vehicle that is a freight vehicle. Such a slow overtaking process is driving the vehicle in the right lane at approximately the same speed, either because it cannot change lanes to the left lane or because the risk is very high In order to avoid a rear-end collision with a freight vehicle, a situation has arisen in which it is necessary to apply a strong brake. Such forced braking is not only unpleasant for the driver of the vehicle traveling forward, but also unnecessarily reduces the traveling speed. Thereby, the flow of the road is also significantly decelerated.
これら全ての追越シチュエーションにおいて、従来のACCシステムでは、ドライバーが、能動的に、例えば、設定速度、乃至、巡航速度Vsetを繰り返し変更するなど、ACCシステムの帰還制御に介入することが必要になる。これにより、ACCシステムの操作が、ドライバーにとって快適でなくなる、即ち、その有用性が、低減する。場合によっては、ドライバーが、車両のACCシステムを完全にオフにすることもあり得る。更には、上記の従来のACCシステムの弱点が、追越シチュエーションにおいて、危険な交通状況を生み出す場合すらあり得る。 In all these overtaking situations, the conventional ACC system requires that the driver actively intervene in the feedback control of the ACC system, for example, changing the set speed or the cruise speed V set repeatedly. Become. This makes the operation of the ACC system less comfortable for the driver, i.e. its usefulness is reduced. In some cases, the driver may turn off the vehicle's ACC system completely. Furthermore, the weaknesses of the conventional ACC system described above can even create dangerous traffic situations in overtaking situations.
よって、本発明の課題は、ACCシステムによって走行速度が帰還制御される車両の追越プロセスの際の安全性を高めるための方法と装置を提供することである。 Therefore, an object of the present invention is to provide a method and an apparatus for improving safety in the overtaking process of a vehicle whose traveling speed is feedback controlled by an ACC system.
この課題は、本発明の請求項1記載の特徴を有する方法によって達成される。
This object is achieved by a method having the features of
本発明は、その一番目のアスペクトにおいて、その走行速度がACCシステムによって帰還制御されている車両の追越プロセスにおける安全性を高める、以下のステップを包含する方法を提供する:
車両が、少なくとも一台のある車線の前方を走行している車両を、ある追越プロセスにおいて、追い越す可能性のある潜在的追越シチュエーションを認識するステップ;並びに、
車両が、合法的に前方を走行中の車両を追い越せる場合、自分の追越プロセスを加速する、並びに、該車両が、非合法的な追越をしそうな場合、或いは、前方を走行中の車両の追越プロセスを可能にするために自分の追越プロセスを阻止(中断)するステップ。
The present invention, in its first aspect, provides a method comprising the following steps to increase safety in the overtaking process of a vehicle whose travel speed is feedback controlled by an ACC system:
Recognizing potential overtaking situations that a vehicle may overtake in a certain overtaking process a vehicle traveling in front of at least one lane; and
If a vehicle can overtake a vehicle that is legally traveling ahead, it will accelerate its overtaking process, and if the vehicle is likely to be illegally overtaking, or a vehicle traveling ahead Blocking (interrupting) your overtaking process to allow your overtaking process.
本発明に係る方法は、危険な交通シチュエーションにおいて巡航速度を適合することを、ドライバーが強制されないと言う長所を提供する。これにより、ACCシステムの操作快適性が、有意に改善される。 The method according to the present invention offers the advantage that the driver is not forced to adapt the cruise speed in dangerous traffic situations. Thereby, the operational comfort of the ACC system is significantly improved.
本発明に係る方法は、更なる長所として、ACCシステムが、顧慮ある挙動、即ち、交通の流れの改善も提供する。特に好ましいことに、ACCシステムを備えた車両よりもほんの僅かにだけ低速で走行している前方を走行中の車両が、その、例えば、前方を走行中の貨物車両に対する追越プロセスを、確実に終了することを可能にする。そのために、該車両のACCシステムは、例えば、自車両の加速プロセスを実施しないなど、自らが多大な制限を受けることなく、前方を走行中の車両が、例えば、その前方を走行中の貨物車両などと言った第三の車両を安全に追い越すことが可能になるように、自車両の追越プロセスを阻止する。 The method according to the invention has as a further advantage that the ACC system also provides a thoughtful behavior, i.e. an improvement in traffic flow. It is particularly preferred that a vehicle traveling in front that is traveling only slightly slower than a vehicle with an ACC system ensures that the overtaking process for a freight vehicle traveling ahead, for example, Allows you to exit. For this reason, the ACC system of the vehicle is not subject to great restrictions, such as not performing the acceleration process of the own vehicle, for example, a freight vehicle traveling in front of the vehicle, for example, The overtaking process of the own vehicle is blocked so that it is possible to safely overtake the third vehicle.
これにより、時間と燃料を無駄にする前方を走行中の車両の急制動を回避することができる。更には、これにより、前方を走行中の車両のドライバーが不愉快になることも回避できる、即ち、特に、双方の交通参加者の走行安全性を脅かすことになるかもしれない該ドライバーの憤慨した反応を回避することができる。 As a result, it is possible to avoid sudden braking of the vehicle that is traveling ahead, wasting time and fuel. Furthermore, this also avoids annoyance of the driver of the vehicle traveling ahead, i.e. in particular the driver's tricky reaction which may threaten the driving safety of both traffic participants. Can be avoided.
本発明に係る方法の可及的実施形態においては、該車両のその時点の走行速度と前方を走行中の車両の走行速度が、ACCシステムの設定されている巡航速度を下回っている場合に、潜在的追越シチュエーションとして認識される。 In a possible embodiment of the method according to the present invention, when the current traveling speed of the vehicle and the traveling speed of the vehicle traveling ahead are below the cruise speed set in the ACC system, Recognized as a potential overtaking situation.
本発明に係る方法の更なる可及的実施形態では、該車両が、非合法的に右側から少なくとも一台の前方を走行中の車両を追い抜く恐れがある場合、車両の現在の走行速度を、前方を走行中の車両の走行速度に合わせ、設定可能な維持期間、これを維持することにより、追越プロセスを阻止することが可能である。 In a further possible embodiment of the method according to the invention, if there is a risk that the vehicle illegally overtakes at least one vehicle traveling forward from the right side, the current traveling speed of the vehicle is It is possible to prevent the overtaking process by maintaining the settable maintenance period in accordance with the traveling speed of the vehicle traveling ahead.
本発明に係る方法の更なる可及的実施形態では、少なくとも一台の前方を走行中の車両の走行速度が、該車両のACCシステムの一つのセンサーユニットによって捕捉される。 In a further possible embodiment of the method according to the invention, the traveling speed of a vehicle traveling in front of at least one vehicle is captured by one sensor unit of the ACC system of the vehicle.
本発明に係る方法の更なる可及的実施形態では、該車両のACCシステムのセンサーユニットは、比較的狭い視野領域・開口角度のレーダー・センサーによって構成されている。 In a further possible embodiment of the method according to the invention, the sensor unit of the ACC system of the vehicle is constituted by a radar sensor with a relatively narrow viewing area and opening angle.
本発明に係る方法の更なる可及的実施形態では、車両の更に一つの比較的大きな視野領域・開口角度を有するセンサーユニットが、車両近傍の他の車両を捕捉した場合、維持期間が、延長される。 In a further possible embodiment of the method according to the invention, the maintenance period is extended when a sensor unit having a relatively large field of view and opening angle of the vehicle captures another vehicle in the vicinity of the vehicle. Is done.
本発明に係る方法の更なる可及的実施形態では、車両の該更なるセンサーユニットが、少なくとも一つの車載カメラ、レーダー・センサー、及び/或いは、ライダー・センサーを包含している。 In a further possible embodiment of the method according to the invention, the further sensor unit of the vehicle includes at least one in-vehicle camera, a radar sensor and / or a rider sensor.
本発明に係る方法の更なる可及的実施形態では、該車両が、左車線を走っている一つの車両グループの複数の前方を走行中の車両を右車線から追い抜く恐れがある場合に、該車両のその時点の走行速度を、該車両グループ、乃至、車列の前方を走行中の少なくとも一台の、ACCシステムのセンサーユニットの視野領域内にあり、ACCシステムの該センサーユニットによって捕捉されている車両の最低、乃至、平均走行速度に合わせることにより、追越プロセスが、阻止される。 In a further possible embodiment of the method according to the invention, if the vehicle has a risk of overtaking a plurality of vehicles traveling in front of a vehicle group running in the left lane from the right lane, The current traveling speed of the vehicle is within the field of view of the sensor unit of the ACC system, and is captured by the sensor unit of the ACC system. By adjusting to the minimum or average travel speed of the existing vehicle, the overtaking process is prevented.
本発明に係る方法の更なる可及的実施形態では、車両が左車線を走行し、且つ、右車線に、左車線に車線変更しそうな前方を走行中の車両が認識された場合、追越プロセスが加速される。 In a further possible embodiment of the method according to the invention, if a vehicle is traveling in the left lane and a vehicle traveling in front of the right lane that is likely to change to the left lane is recognized, The process is accelerated.
本発明に係る方法の更なる可及的実施形態では、前方を走行中の車両が、その前方にある不動のオブジェクト、或いは、その前方にある、低速で移動している、特に、貨物自動車に、実際に接近している、或いは、接近することが予想される場合に、右車線の前方を走行中の車両が、左車線に車線変更をしようとしていると認識される。 In a further possible embodiment of the method according to the invention, a vehicle traveling in front of a stationary object in front of it, or in front of it, moving at low speed, in particular a lorry When the vehicle is approaching or is expected to approach, it is recognized that the vehicle traveling in front of the right lane is changing the lane to the left lane.
本発明に係る方法の更なる可及的実施形態では、右車線に、左車線に車線変更しそうな前方を走行中の車両が認識された場合、前方を走行中の車両を追い越すためにまだ残されている追越時間が計算される。 In a further possible embodiment of the method according to the invention, if a vehicle traveling in front of the left lane is recognized in the right lane, it still remains to pass the vehicle traveling ahead. The overtaking time being calculated is calculated.
本発明に係る方法の更なる可及的実施形態では、左車線を走行している車両のその時点の走行速度、右車線の前方を走行中の車両の走行速度、並びに、右車線の前方を走行中の車両が、その前方のオブジェクトに接近する接近速度に基づいて、まだ残されている追越時間が計算される。 In a further possible embodiment of the method according to the invention, the current traveling speed of the vehicle traveling in the left lane, the traveling speed of the vehicle traveling in front of the right lane, and the front of the right lane. The remaining overtaking time is calculated based on the approach speed at which the traveling vehicle approaches the object in front of it.
本発明に係る方法の更なる可及的実施形態では、設定されている巡航速度、及び/或いは、ACCシステムの他の帰還制御パラメーターが、計算によって割り出された、まだ残されている追越時間に基づいて、自分の追越プロセスが安全に実施できる、或いは、前方を走行中の車両が、追越プロセスを実施できるように変更される。 In a further possible embodiment of the method according to the invention, the set cruise speed and / or other feedback control parameters of the ACC system are determined by calculation and are still remaining overtaking. Based on the time, it is changed so that the overtaking process can be carried out safely or the vehicle traveling ahead can carry out the overtaking process.
本発明に係る方法の更なる可及的実施形態では、追越プロセスは、ドライバーが、該追越プロセスの実施を該車両のACCシステムへの入力によって承認した、及び/或いは、追越プロセスにおいて法定最高速度を超過しない場合にのみ、実施される。 In a further possible embodiment of the method according to the invention, the overtaking process is performed when the driver has approved the execution of the overtaking process by input to the ACC system of the vehicle and / or in the overtaking process. Only implemented if the legal maximum speed is not exceeded.
本発明は、更に、第二のアスペクトにおいて、請求項8に記載の特徴を有する車両の追越プロセスにおける安全性を向上する装置も提供する。
The invention further provides, in a second aspect, an apparatus for improving safety in a vehicle overtaking process having the features of
即ち、本発明は、その走行速度がACCシステムによって帰還制御されている車両の追越プロセスにおける安全性を高める、以下を包含する装置を提供する:
少なくとも一台の他の車線の前方を走行している車両を、追越プロセスにおいて、追い越す可能性のある潜在的追越シチュエーションを認識する認識ユニット、
但し、該車両が、合法的に前方を走行中の車両を追い越せる場合は、自分の追越プロセスは加速され、逆に、該車両による追越が、非合法的になる恐れがある場合は、該追越プロセスは、阻止される。
That is, the present invention provides an apparatus that enhances safety in the overtaking process of a vehicle whose travel speed is feedback controlled by an ACC system, including:
A recognition unit that recognizes potential overtaking situations that may overtake a vehicle traveling in front of at least one other lane in the overtaking process;
However, if the vehicle can legally overtake a vehicle that is traveling ahead, your overtaking process will be accelerated, and conversely, if overtaking by the vehicle is likely to be illegal, The overtaking process is blocked.
以下、車両の追越プロセスにおける安全性を向上するための本発明に係る方法、並びに、本発明に係る装置の可及的実施形態を、添付されている図を用いて詳細に説明する。
図1からも明らかなように、車両の、特に、その速度が車両のACCシステムによって帰還制御されている道路用車両の追越プロセスにおける安全性を向上するための本発明に係る方法は、基本的に、二つのステップS1とS2を有している。
Hereinafter, the method according to the present invention for improving the safety in the vehicle overtaking process and the possible embodiments of the device according to the present invention will be described in detail with reference to the accompanying drawings.
As is clear from FIG. 1, the method according to the invention for improving the safety of a vehicle, in particular a road vehicle whose speed is feedback controlled by the vehicle ACC system, is basically In particular, it has two steps S1 and S2.
第一ステップS1では、ACCシステムを装備した車両が少なくとも一台の他の車線の前方を走行中の車両を、追越プロセスにおいて追い越すかもしれない潜在的追越シチュエーションが、認識される。ある可及的実施形態においては、該車両のその時点の走行速度と前方を走行中の車両の走行速度が、ACCシステムの設定されている巡航速度Vsetを下回っている場合に、特に、潜在的追越シチュエーションとして認識される。 In a first step S1, a potential overtaking situation is recognized in which a vehicle equipped with an ACC system may overtake a vehicle traveling ahead of at least one other lane in the overtaking process. In a possible embodiment, in particular when the vehicle's current travel speed and the travel speed of the vehicle traveling ahead are below the cruise speed V set set in the ACC system, Recognized as an overtaking situation.
潜在的追越シチュエーションが認識された場合、次のステップS2においてACCシステムが反応する。その際、ACCシステムを装備した車両が、合法的に前方を走行中の車両を追い越せる場合、追越プロセスは、加速され、逆に、ACCシステムを装備した車両にとって非合法的な追越、特に、右側追い越しになりそうな場合、該追越プロセスは、阻止される。該追越プロセスは、少なくとも一台の前方を走行中の車両を、その国の道路交通法において非合法的に、特に、右側から、追い抜くかもしれない場合に、前方を走行中の車両の走行速度にその時点の車両の走行速度を合わせ、設定可能な維持期間、維持することによって回避される。 If a potential overtaking situation is recognized, the ACC system reacts in the next step S2. In doing so, if a vehicle equipped with the ACC system can legally overtake a vehicle traveling ahead, the overtaking process is accelerated, and conversely, overtaking that is illegal for vehicles equipped with the ACC system, especially If it is likely to overtake the right side, the overtaking process is blocked. The overtaking process involves driving at least one vehicle traveling ahead if it may overtake it illegally in the country's road traffic law, particularly from the right side. This is avoided by adjusting the vehicle speed at that time to the speed and maintaining it for a settable maintenance period.
ある可及的実施形態では、少なくとも一台の前方を走行中の車両の走行速度が、該車両のACCシステムの一つのセンサーユニットによって捕捉される。該センサーユニットは、ある可及的実施形態においては、比較的狭い視野領域・開口角度のレーダー・センサーによって構成されている。本発明に係る方法の可及的実施形態では、車両の更に一つの比較的大きな視野領域・開口角度を有するセンサーユニットが、自車両近傍の他の車両を捕捉した場合、該維持期間が、延長される。この更なるセンサーユニットは、ある可及的実施形態においては、車載カメラ、更なるレーダー・センサー、及び/或いは、ライダー・センサーを包含している。 In one possible embodiment, the traveling speed of a vehicle traveling in front of at least one vehicle is captured by one sensor unit of the vehicle's ACC system. In a possible embodiment, the sensor unit is constituted by a radar sensor having a relatively narrow viewing area and opening angle. In a possible embodiment of the method according to the invention, when a sensor unit having a relatively large field of view and opening angle of the vehicle captures another vehicle in the vicinity of the host vehicle, the maintenance period is extended. Is done. This further sensor unit includes, in some possible embodiments, an in-vehicle camera, an additional radar sensor, and / or a rider sensor.
可及的実施形態において、ステップS2では、ACCシステムを装備した車両が、左車線、例えば、アウトバーンの左車線を走っている一つの車両グループ、乃至、車列の複数の前方を走行中の車両を右車線から追い抜く恐れがある場合に、該車両のその時点の走行速度を、該車両グループ、乃至、車列の前方を走行中の少なくとも一台の、ACCシステムのセンサーユニットの視野領域内にあり、ACCシステムの該センサーユニットによって捕捉されている車両の最低、乃至、平均走行速度に、ACCシステムを装備した車両のその時点の走行速度を合わせることにより、追越プロセスが、阻止される。 In a possible embodiment, in step S2, a vehicle equipped with an ACC system is a vehicle group traveling in the left lane, for example, the left lane of an autobahn, or a vehicle traveling in front of a plurality of trains. The vehicle's current traveling speed is within the field of view of the sensor group of at least one ACC system traveling in front of the vehicle group or train. Yes, the overtaking process is prevented by matching the current travel speed of the vehicle equipped with the ACC system to the minimum or average travel speed of the vehicle being captured by the sensor unit of the ACC system.
本発明に係る方法の更なる可及的実施形態では、ステップS2において、車両が左車線を走行し、且つ、右車線に、左車線、例えば、アウトバーンの左車線に車線変更しそうな前方を走行中の車両が認識された場合、追越プロセスが加速される。これは、例えば、前方を走行中の車両が、その前方にある不動のオブジェクト、例えば、工事現場、或いは、その前方にある、低速で移送しているオブジェクト、例えば、低速で走行している貨物車両に、実際に接近している、或いは、接近することが予測される場合に認識される。ある可及的実施形態では、このようなシチュエーションにおいて、例えば、二台の貨物車両間にいる右車線の前方を走行中の車両が、左車線へ車線変更し、二台の車両の衝突の可能性がある場合、アウトバーンの左車線を移動中のACCシステムを装備した車両が、前方を走行中の車両を追い越すのに残されている追越時間が、計算される。 In a further possible embodiment of the method according to the invention, in step S2, the vehicle travels in the left lane and travels to the right lane in front of the left lane, for example the left lane of the autobahn. If the vehicle inside is recognized, the overtaking process is accelerated. This is the case, for example, when a vehicle traveling in front of a stationary object in front of it, for example, a construction site, or in front of it, an object moving at a low speed, for example, a cargo traveling at a low speed. Recognized when the vehicle is actually approaching or expected to approach. In a possible embodiment, in such a situation, for example, a vehicle traveling in front of the right lane between two freight vehicles can change lanes to the left lane, and two vehicles can collide. If so, the overtaking time remaining for a vehicle equipped with the ACC system traveling in the left lane of the autobahn to pass ahead of the vehicle traveling ahead is calculated.
ある可及的実施形態においては、ACCシステムを装備した左車線を走行中の車両に残されている追越時間は、該ACCシステムを装備した車両のその時点の走行速度、右車線の前方を走行中の車両の走行速度、並びに、右車線の前方を走行中の車両が、その前方にある不動の、乃至、動いているオブジェクトに接近する接近速度に依存して計算される。ある可及的実施形態においては、設定されているACCシステムの巡航速度Vset、及び/或いは、その他の回帰制御用パラメーターは、計算された、残されている追越時間に依存して、追越プロセスが、安全に実施できるように変更される。ある可及的実施形態においては、その際、追越プロセスは、ACCシステムを装備した車両のドライバーが、ACCシステムへの入力によって承認した場合、及び/或いは、追越プロセス中に、法定最高速度、乃至、速度制限を、超過しない場合にのみ実施される。 In a possible embodiment, the overtaking time remaining in a vehicle traveling in the left lane equipped with the ACC system is the current traveling speed of the vehicle equipped with the ACC system, in front of the right lane. It is calculated depending on the traveling speed of the traveling vehicle and the approaching speed at which the vehicle traveling in front of the right lane approaches an immovable or moving object in front of the right lane. In certain possible embodiments, the cruising speed V set and / or other regression control parameters of the set ACC system may be dependent on the calculated remaining overtaking time. The process is changed so that it can be carried out safely. In certain possible embodiments, the overtaking process is then performed when the driver of the vehicle equipped with the ACC system approves by input to the ACC system and / or during the overtaking process. Or only if the speed limit is not exceeded.
図2, 3, 4はそれぞれ、本発明に係る方法が、追越プロセスにおける安全性の向上に有利である追越シチュエーションの異なる例を示している。 2, 3 and 4 show different examples of overtaking situations where the method according to the invention is advantageous for improving the safety in the overtaking process.
図2では、本発明に係るACCシステムを装備した車両1は、左車線Lと右車線Rを有する片側二車線の道路、特に、アウトバーンを走行している。該ACCシステムを装備した車両1は、示されている例では、走行速度Vにおいて、右側車線Rを走行している。図2に示されている交通シチュエーションは、例えば、以前左車線Lを走行していた車両1が、同じ車線を後方から接近して来る車両2を認識し、この後方から接近して来る高速な車両2が、左車線Lを通過できるように、右側への車線変更を実施した場合などに起こり得るものである。これは、特に、ACCシステムを装備した車両1が、比較的低速で走っている車両3の後ろを走行し、追い越せない場合に、頻繁に起こり得る例である。この様な交通シチュエーションにおいては、右側によけた追従車両1の走行速度Vは、ACCシステム内で設定されている巡航速度Vsetよりも遅い。車両1のACCシステムは、右車線Rへの車線変更後、車両1が、他の車線の、即ち、左車線Lの前方を走行中の車両2を追越プロセスにおいて追い越す、潜在的追越シチュエーションを認識する。これは、例えば、車両1のその時点の走行速度Vが、車両1のACCシステムの設定巡航速度Vsetよりも遅い走行中の車両3の走行速度以下である場合に認識される。このケースでは、車両1には、前方を走行中の車両3を、非合法的に、即ち、右側から追い抜く恐れがある。この様なシチュエーションにおいて、左前方を走行中の車両3も、その後方から来る、特に、高速な車両2を通過させるために、右車線Rに車線変更すると、このシチュエーションにおいて、車両3と右側を通過している車両1間が接触する、そして、場合によっては、後方から接近して来る車両2が、左車線L前方を低速で走行中の車両3に後ろから衝突する追突事故も起こり得る。そのため、安全を向上するための本発明に係る方法においては、このようなケースでは、ステップS2において、ACCシステムを装備した車両1が、前方を走行中の車両3を非合法的に追い抜きそうになった場合、その追越プロセスが、阻止される。この様な追越プロセスの阻止は、車両1のACCシステムによって、自動的に実施される。この際、車両1のACCシステムは、好ましくは、非合法的な追越を、車両1のその時点の走行速度Vを前方を走行中の車両3の走行速度に合わせてから、設定可能な維持期間、例えば、数秒間これを維持することによって阻止する。これにより、車両1が、前方を走行中の車両3を右車線Rから追い越す、乃至、通過することが、阻止され、前方を走行中の車両3も、右車線Rへの車線変更が可能な十分なスペースが残される。この様なケースでは、後方から接近して来る高速の車両には、双方の車両1, 3を左車線L上において危険なく追い越すことが可能となる。ある可及的実施形態においては、ACCシステムを装備した車両1は、前方を走行中の車両の走行速度Vを捕捉するセンサーユニットを装備している。該センサーユニットは、ある可及的実施形態においては、比較的狭い視野領域・開口角度のレーダー・センサーによって構成されていることができる。ACCシステムを装備した車両1のレーダー・センサーの視野領域は、図2に概略的に示されている。ある好ましい実施形態においては、該ACCシステムを装備した車両1は、その視野領域SB2が、比較的広い視野領域・開口角度である更なるセンサーユニットも装備している。この更なるセンサーユニットは、例えば、車載カメラ、更なるレーダー・センサー、及び/或いは、ライダー・センサーであることができる。図2に示されている実施例では、ACCシステムを装備した車両1は、二つのセンサーユニット、即ち、視野領域SB1が、比較的狭い視野領域・開口角度である第一センサーユニットと、視野領域SB2が、比較的広い視野領域・開口角度である第二センサーユニットを備えている。本発明に係る方法の好ましい実施形態では、車両1が、この期間、前方を走行中の車両3の走行速度に合わせて維持する維持期間Hは、比較的広い視野領域・開口角度SB2を有する該車両の第二センサーユニットが、他の車両、特に、車両1近傍の左車線Lの側方の前方を走行中の車両3を捕捉した場合に延長される。ACCシステムの挙動は、ACCシステムによって車両1が加速される前に、合わせられた速度が、設定可能な維持期間H維持されることによって改善される。即ち、合わされて減速した走行速度が、車両1のACCシステムが、設定されている巡航速度Vsetに再び加速する前、ある一定期間、例えば、十秒間維持される。前方を走行中の車両3が、十分に加速し、ACCシステムのACCセンサーの視野領域に再び入った場合、左車線L上で認識されたオブジェクトに対して帰還制御が実施できる。更に、ACCシステムの好ましい実施形態では、維持時間Hが、広い視野領域SB2を有する更なるセンサーユニットによって、必要な限り延長され続けることも可能である。即ち、例えば、車両1にモノカメラ、或いは、ステレオカメラが搭載されており、車両1の該カメラ1が、ACCシステムのレーダー・センサーの狭い視野領域SB1外の左車線L上の前方を走行中の車両3を捕捉している間は、車両の速度Vが、維持され、巡航速度Vsetへの加速が実施されない。この様なケースでは、十分な速度情報を得ることのできないオブジェクトに対する帰還制御は、実施されず、設定されている巡航速度Vsetへの加速が、阻止される。多くのケースにおいて、左車線L上の車両は、減速しないため、右側追い越しを回避することができる。
In FIG. 2, the
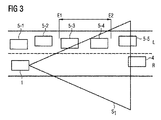
図3は、本発明に係る方法が採用される更なる交通シチュエーションを示している。車両1は、図3に示されているような比較的狭い視野領域SB1を有するセンサーユニットを備えたACCシステムを搭載している。示されているような交通シチュエーションでは、ACCシステムを装備した車両1は、片側二車線の道路、特に、アウトバーンの右車線Rを速度Vで走行している。図3に示されているような交通シチュエーションでは、交通量、特に、アウトバーンの左車線Lの交通量は、比較的多い。左車線L上を、複数の車両5が、列を形成して走行している中、車両1は、右車線R上を、低速の車両、例えば、貨物車両4に対して大きな間隔をもって走行している。この交通シチュエーションにおいて、車両1のドライバーは、集中力を節約すべく、右車線Rを走行しているが、左車線L上の車列内を走行している車両5−1, 5−2, 5−3, 5−4, 5−5の走行速度Vは、このような状況において典型的な如く、ACCシステムを装備した車両1の速度Vよりも僅かにだけ早い。図3からも明らかなように、左車線L上の数台の車両5−iは、車両1のACCシステムのセンサーユニットの視野領域SB1内にない一方、他の前方を走行中の車両は、ACCシステムのセンサーユニットの視野領域SB1内にある。図3からも明らかなように、左車線L上の真隣の車両5−1, 5−2は、長い期間、車両1に対して略並行してアウトバーンを走行しているため、ACCセンサーの捕捉領域にない。よって、このような交通シチュエーションでは、ACCセンサーの視野領域SB1内のより前方を走行中の車両、例えば、車両5−4, 5−5から速度設定値を割り出すことが可能である。ある可及的実施形態においては、中距離、例えば、ACCセンサーの視野領域SB1内の距離E1から距離E2離れた車両が、選択される、乃至、セレクトされる。ある可及的実施形態においては、距離E1と距離E2間において選択された車両グループの全車両中の最低速度が、捕捉され、ACCシステムの帰還制御基準値として用いられる。従来のACC帰還制御とは異なり、ここでは、ACCシステムの快適性を高めるために、好ましくは、速度シグナル用フィルターを採用することができる。代案的な実施形態では、車両グループの、例えば、車両5−3, 5−4の走行速度の単純な平均値、乃至、荷重された平均値をACCシステムの速度基準値として割り出すことが可能である。図3に示されている交通シチュエーションでも、追越シチュエーションは、典型的な特徴から認識することができる。図3に示されている交通シチュエーションでは、車両1も走行している右車線R上のセンサー領域SB1に一台も、或いは、ほとんど車両が走行していない、或いは、車両4が比較的大きな間隔をもって走行しているなか、比較的多くの車両が、短い間隔で左車線L上を走行している。このシチュエーションにおいてACCシステム1の巡航速度Vsetが、左車線L上の前方を走行中の車両グループ、乃至、車列の速度よりも高く設定されている場合、潜在的追越シチュエーションが認識される。
FIG. 3 shows a further traffic situation in which the method according to the invention is employed. The
車両1の左側に車線があり、車両1が、高く設定されている巡航速度Vsetで前方を走行中の車両に接近する全ての交通シチュエーションにおいて、ドライバーが、追越プロセスを実施するために左車線Lに車線変更する前に、車両1のACCシステムによって、ある意味、制動されてしまうシチュエーションが起こり得る。例えば、図3のような交通シチュエーションにおいて、車両1が、同じ右車線Rの前方を走行中の貨物車両4に接近した場合、従来のACCシステムでは、ドライバーが、左車線に車線変更する前に、制動されてしまうことが起こり得る。ある可及的実施形態においては、ACCシステムから、左車線Lへの快適な車線変更タイミングに関するアドバイスをドライバーが得ることができるため、車両1のドライバーは、車両1のACCシステムと容易にやり取りできる。左車線Lへの快適な車線変更を実施できるように、例えば、ドライバーは、ACC帰還制御系が車両1の速度を、前方を走行中の車両4に起因して減速する五秒前に、車両1のACCシステムからのアドバイスを得ることができる。例えば、車両1のドライバーは、ACCシステムから、車線変更の実施を示唆する例えば、インストゥルメント・クラスター、或いは、HUD(ヘッド・アップ・ディスプレー)にランプを点灯させるなど、控えめなビジュアル・アドバイスを得ることができる。
In all traffic situations where there is a lane on the left side of the
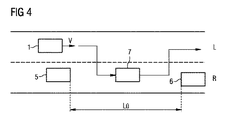
図4は、本発明に係る方法が好ましく採用される得る更なる交通シチュエーションを概略的に示している。図4に示されている交通シチュエーションでは、ACCシステムを装備した車両1が、片側二車線の道路、特にアウトバーンの左車線Lを走行している。前方を相対的に低速で走行中の車両7が、右車線Rへ車線変更することによって車両1を回避したが、この際、該前方を走行中の車両7は、二台の比較的低速で走行している、例えば、二台の貨物車両5, 6の間の間隔LUに入ってしまった。しかし、双方の貨物車両5, 6の間の間隔LUが、比較的小さい場合、該前方を走行中の車両7が、特に、該前方を走行中の車両7のドライバーが、後続の車両1に気付いていない場合、再び、左車線Lへと出てくる可能性がある。間隔LUの大きさに応じて、本発明に係る方法の可及的実施形態においては、車両1が、左車線Lを走行し、且つ、右車線R前方を走行中の車両7が、ある時点において、左車線Lに出てくる、特に、その前方にあるオブジェクト、特に貨物車両6に、接近した時点において、左車線Lに出てくる恐れがある場合、車両1の追越プロセスが、自動的に加速される。例えば、右車線Rの前方を走行中の該車両7が、左車線Lに出て来る危険性は、前方を走行中の車両7が、その前方にある不動のオブジェクト、例えば、工事現場、或いは、その前方を低速で走行しているオブジェクト、例えば、図4に示されているような貨物車両6に、実際に接近している、或いは、接近することが予測される場合に、認識される。ある可及的実施バリエーションでは、この際に、右車線Rの前方を走行中の車両7が、その前方にあるオブジェクトに接近している場合、好ましくは、車両1に該前方を走行中の車両7を追い越すために残されている追越時間が計算されるある可及的実施形態においては、残されている追越時間は、車両1のACCシステムの計算ユニットによって、該車両1のその時点の走行速度、右車線の前方を走行中の車両7の走行速度V、並びに、右車線Rの前方を走行中の車両7が、その前方にあるオブジェクト、例えば、貨物車両6に接近する接近速度に依存して計算される。車両1の設定された巡航速度Vset、或いは、車両1のACCシステムの他の帰還制御パラメーターは、この際、計算によって割り出された、まだ残されている追越時間に依存して、追越プロセスが、まだ安全に終了できるように変更される。好ましくは、該車両1が、前方を走行中の車両7を左車線Lから追い越す追越プロセスは、車両1のドライバーが、該追越プロセスを、車両1のACCシステムへの入力によって承認した場合、及び/或いは、アウトバーンの法定最高速度、乃至、速度制限を追越プロセス中に超過しない場合に限って実施される。
FIG. 4 schematically shows a further traffic situation in which the method according to the invention can be preferably employed. In the traffic situation shown in FIG. 4, the
図4に示されているような追越シチュエーションは、ACCセンサーの到達距離が、右車線Rの間隔LUを測定するのに十分であれば、車両1のACCシステムによって認識されることができる。この様なケースでは、追越時間が制限された可及的追越シチュエーションであることが、直接的に認識可能である。図4に示されているような交通シチュエーションは、交通が空いている状況下で起こり得る典型的なケースであり、それぞれ大きな車間を取って貨物車両が右車線Rを低速で走行している。しかし、ここでは、前方の貨物車両が、まだ、車両1のACCセンサーのセンサー到達距離外にある時に、前方を走行中の車両7が、左車線Lへと出てくることもあり得る。右車線Rを通過した貨物車両のヒストリーから、ある可及的実施形態においては、類似する交通シチュエーションを予測できる。このために、既知の相対速度、自己速度、並びに、時間測定を基に、右車線上のそれぞれの貨物車両間の平均間隔を割り出す、乃至、該間隔を計算する。この際に、貨物自動車が右車線Rに規則的に現れることが認識された場合、前方を走行中の車両7が、ある貨物車両5の後ろから出てくる潜在的な追越時間が制限された追越シチュエーションを、仮にその先を走行中の貨物車両6が、該車両1のACCセンサーの視野領域SB内にまだない場合であっても、それを認識することができる。また、前方を走行中の車両7が、貨物車両5の直ぐ手前から、即ち、小さな間隔で、出てくるプロセスからも、追越時間が制限された追越シチュエーションであるということが認識できる。例えば、図4に示されている追越シチュエーションなど、追越時間が制限された追越シチュエーションが、認識された場合は、好ましくは、追越に必要な時間が、合法な範囲内において最短化される。ある可及的実施形態においては、最大許容される加速が、キックダウンによって実施される。更に、ACCシステムの帰還制御パラメーターの変更によって、幾ばくかの速度超過を許容する動的な帰還制御セッティングが実施される。
The overtaking situation as shown in FIG. 4 can be recognized by the ACC system of the
走行速度とACCシステム内で設定されている巡航速度Vsetの差が、使用可能な追越時間内に追越プロセスを確実に完了するのに、十分ではないことも起こり得る。この様なケースでは、ある可及的実施形態においては、追越プロセスを加速するために、設定されている巡航速度Vsetを超過し、その後に、再び、巡航速度Vsetに減速されることが実施される。これは、該ACCシステムが、例えば、設定された巡航速度Vset+10km/hと言った速度許容値を与えることにより実施可能であり、追越時間が制限された追越プロセスでは、巡航速度の超過が、速度許容値の範囲内で許される。ある可及的実施形態においては、この許容値は、自ら設定することができる。代案的実施形態では、この速度許容値は、ユーザーインターフェースを介してコンフィグレーション可能である。またこの速度許容値は、更なる可及的実施形態においては、ACCシステムのダイナミズム、即ち、目標タイムギャップを基に潜在的に選択されることも可能である。合法な、或いは、推奨される最高速度Vmaxを超過しないように、本発明に係る方法によって提供される機能は、制限速度を認識した場合、一定期間、停止され、制限速度、乃至、速度制限が解除されたことが認識されてから再作動される。ある道路において有効な制限速度、乃至、速度制限は、例えば、車両1のカメラ、或いは、ナビゲーション・システムによって認識されることができる。
It may happen that the difference between the travel speed and the cruise speed V set set in the ACC system is not sufficient to ensure that the overtaking process is completed within the available overtaking time. In such a case, in some possible embodiments, in order to accelerate the overtaking process, the set cruise speed V set is exceeded and then decelerated again to the cruise speed V set. Is implemented. This can be done by the ACC system giving for example a speed tolerance of set cruise speed V set +10 km / h, for an overtaking process with limited overtaking time, Excess is allowed within the speed tolerance. In certain possible embodiments, this tolerance can be set by itself. In an alternative embodiment, this speed tolerance is configurable via a user interface. This speed tolerance may also be potentially selected based on the ACC system dynamism, ie the target time gap, in a further possible embodiment. In order not to exceed the legal or recommended maximum speed V max , the function provided by the method according to the present invention is stopped for a certain period of time when the speed limit is recognized, and is limited to a speed limit or speed limit. It is reactivated after it is recognized that is released. The speed limit or speed limit effective on a certain road can be recognized by the camera of the
更なる可及的実施形態においては、追越プロセスは、車両1のドライバーが、追越プロセスの実施を、車両1のACCシステムへの入力によって承認した場合にのみ実施される。この実施形態では、ドライバーによる追越プロセスの実施のための承認をACCシステムが要求する。ドライバーには、この目的で、認識された追越シチュエーションが迫っていることが、ヴィジュアルな、視覚的な、聴覚的な報告によって示されることができる。車両1のドライバーが、これに、例えば、加速命令「Accelerate」や「Resume」を出して、反応した場合、追越プロセスが、巡航速度設定を変更することなく開始される。代案的実施形態では、車両1のドライバーは、アクセルペダルを踏むことによって追越プロセスを承認する。双方のケースにおいて、追越プロセスの承認は、追越シチュエーションが認識された後の一定期間、報告無しにアクティブであっても良い。前方を走行中の車両7の速度、間隔LUの長さ、車両1の最大加速や速度によって、車両7の追越が、少なくともこれが間隔LU内にいる間、不可能であることが認識された場合、該追越プロセスは、回避される、乃至、中止される。
In a further possible embodiment, the overtaking process is performed only if the driver of the
この本発明に係る方法と本発明に係るシステムによれば、車両の追越プロセスにおける安全性が、様々な追越シチュエーションにおいて有意に向上される。更に本発明に係る方法と本発明に係る装置は、ドライバーにとって快適な帰還制御と簡単な操作を提供する。また、従来のACCシステムの機能は、本発明に係る方法によって、更なる走行シチュエーション、特に、追越シチュエーションにも拡張されるにも拘らず、ドライバーによる介入は最小限に抑えられる。特に右側追越プロセスの回避は、高度に自動化された走行において重要である。本発明に係る方法では、ACCシステムのための速度設定値の割り出しにおいて、隣接する車線の交通シチュエーションも考慮される。本発明に係る方法は、ACCシステムを装備した車両の追越挙動の改善を、交通シチュエーションのシチュエーション分析によって提供する。その走行速度がACCシステムによって帰還制御されている車両の追越プロセスにおける安全性を高めるための本発明に係る装置は、ドライバー・アシスタント・システムに内蔵されることができる。 With the method according to the present invention and the system according to the present invention, the safety of the vehicle overtaking process is significantly improved in various overtaking situations. Furthermore, the method according to the invention and the device according to the invention provide a comfortable feedback control and simple operation for the driver. In addition, although the functions of the conventional ACC system are extended to further driving situations, in particular overtaking situations, by means of the method according to the invention, driver intervention is minimized. In particular, avoiding the right overtaking process is important in highly automated driving. In the method according to the invention, traffic situations in adjacent lanes are also taken into account in determining the speed setpoint for the ACC system. The method according to the invention provides an improvement in the overtaking behavior of a vehicle equipped with an ACC system by means of a situation analysis of traffic situations. The device according to the present invention for enhancing safety in the overtaking process of a vehicle whose traveling speed is feedback controlled by the ACC system can be incorporated in the driver assistant system.
本発明に係る方法を、図2, 3, 4に示されている交通シチュエーションの例に基づいて説明する。本発明に係る方法は、他の多くの交通シチュエーション、特に、一車線、乃至、複数車線の道路における潜在的追越シチュエーションにおいて適している。更に、本発明に係る方法は、例えば、片側一車線ずつの一般道路にも適している。この実施形態では、好ましくは、追越に用いる車線上を対抗して走って来る車両の接近速度も考慮される。追越プロセスは、ACCシステムを装備した車両が、合法的に、対向車との衝突の危険性無く追越が可能な場合、本発明に係る方法により加速される。逆に、例えば、左側の車線を対向してくる車両に対しての衝突の危険性があるなど、前方を走行中の車両を許されない方法で追い越すことになりそうな場合、本発明に係る方法によって、追越プロセスは、阻止される。 The method according to the present invention will be described based on the traffic situation example shown in FIGS. The method according to the invention is suitable in many other traffic situations, in particular in potential overtaking situations on single-lane or multi-lane roads. Furthermore, the method according to the present invention is also suitable, for example, for general roads with one lane on each side. In this embodiment, the approach speed of a vehicle that preferably runs on the lane used for overtaking is also considered. The overtaking process is accelerated by the method according to the invention when a vehicle equipped with an ACC system can legally be overtaken without risk of a collision with an oncoming vehicle. On the contrary, when there is a risk of a collision with a vehicle facing the left lane, for example, when the vehicle traveling ahead is likely to be overtaken in an unacceptable manner, the method according to the present invention This prevents the overtaking process.
更なる潜在的な危険な追越シチュエーションもあり得る。例えば、ある可及的実施形態においては、アウトバーン上において、左車線L状を、所謂「逆行車両」が、ACCシステム1を装備した車両1に対向して来る場合も、潜在的な危険な追越シチュエーションが認識される。本発明に係る方法の更なる可及的実施形態では、異なるタイプの道路、即ち、例えば、片側二車線の国道、或いは、合計四車線のアウトバーンなどが分類される。更に、潜在的追越シチュエーションも、それぞれの走行方向で、様々な数の車線、例えば、合計六車線、即ち、片側三車線ずつのアウトバーンなども認識されることができる。このケースでは、車両が、片側三車線のアウトバーンの左車線、中央車線、或いは、右車線のいずれにいるかによって様々な追越シチュエーションが考慮されることができる。複雑な走行シチュエーション、乃至、追越シチュエーションは、異なる視野領域SBと異なる視野・開口角度を有する一つの、或いは、複数のACCセンサーユニットによって認識されることができる。ある可及的実施形態においては、ACCシステムは、視野領域SBが前方に向けられているセンサーユニットだけでなく、視野領域SBが後方に向けられているセンサーユニットも、問題ある交通、乃至、追越シチュエーションを起こしかねない高速で接近して来る車両を認識するために、装備している。好ましい実施形態において、車両1のACCシステムは、様々な前後に向けられた視野領域SBiと視野・開口角度αiを備えた複数のACCセンサーユニットを、複雑な追越シチュエーションを認識し、認識された複雑な追越シチュエーションに対する反応として追越プロセスを加速する、或いは、阻止する、或いは、遅延するために、備えている。更に好ましい実施形態では、ACCシステムは、そのセンサー類を用いて、例えば、図2, 3, 4の様に二車線、或いは、合計六車線のアウトバーンのように片側三車線使用可能など、その道路において何車線使用可能かを認識できる。更に、本発明に係るACCシステムは、センサーによって認識された車線マークによって、特に、その時点において車両が走っている走行車線を認識できる。これにより、ACCセンサーを用いて、例えば、どの車線に低速で前方を走行中の車両があり、どの車線に後方から接近して来る高速な車両があるかを認識することができる。好ましい実施形態では、本発明に係る方法と本発明に係るACCシステムによって、追越シチュエーションの複雑なシチュエーション分析が、認識された車線と異なる車線上の前方を走行中の車両とその絶対速度、並びに、車両1に対する相対速度に基づいて、リアルタイムに実施できる。好ましくは、ACCシステムのデータ処理ユニットによって、リアルタイムに実施されるシチュエーション分析を基に、自車両の加速プロセスが、帰還制御パラメーターの変更により、加速される、或いは、遅延される、或いは、阻止される。
There can be additional potentially dangerous overtaking situations. For example, in one possible embodiment, on the autobahn, the left lane L shape is also a potentially dangerous addition if a so-called “reverse vehicle” is facing the
安全性を向上するための本発明に係る方法が採用可能な更なる可及的交通シチュエーションは、図5に示す如く、ACCシステムを装備した車両1が、アウトバーンの左車線L上において、ACCシステムを装備した車両1よりも僅かにだけゆっくりと走行している右車線Rの前方を走行中の車両8に接近すると言うものである。双方の車両1, 8間の相対速度が小さい場合、右車線Rを走行している車両8を、ACCシステムを装備した車両1が追い越す追越プロセスは、比較的長時間要する。このシチュエーションにおいて、右車線Rの前方を略同じ速度で走行中の車両8が、その前方にある比較的ゆっくりと走行している貨物車両9に接近した場合、追越プロセスに起因して、急ブレーキをかけざるを得ない場合も起こり得る。その理由は、ゆっくりと追越をかけてきているACCシステムを装備した車両1と右車線Rの走行中の車両8との間隔が小さくなりすぎたために、貨物車両9に接近している前方を走行中の車両8が、左側に車線変更できないことである。本発明に係る方法によれば、この様な潜在的追越シチュエーションは、特に、右車線Rの前方を低速で走行中の貨物車両9の速度、右車線Rのその後ろから接近してきている車両8の速度、並びに、該貨物車両9とその後方を走行中の車両8との間隔から認識される。この様な交通シチュエーションが認識された後、本発明に係る方法では、ACCシステムを装備した左車線Lを走行中の車両1の位置、右車線Rを僅かにだけゆっくりとその前方を走行している車両8の位置に基づいて、ACCシステムを装備した車両1の加速が、中止される、乃至、遅延される。ある可及的実施形態においては、速度情報の他、例えば、視覚的交通シグナル、特に、ブレーキやウインカーシグナルと言った他のシグナルも評価される。
A further possible traffic situation in which the method according to the invention for improving safety can be adopted is that, as shown in FIG. 5, the
ここに示されている実施バリエーションでは、ACCシステムを装備した車両1は、前方を走行中の車両8に対して、思いやりのある挙動を示し、特に、有意にゆっくりと走行している貨物車両9を追い越すための左車線Lへの車線変更を可能にしている。これにより、道路交通の流れが向上し、ACCシステムを装備した車両1のより直感的な挙動が、提供される。右前方を走行中の車両8もACCシステムを装備している場合、図5に示したこの様な特定な交通シチュエーションを認識し、オプション的に、車両8の貨物車両9を追い越すための追越プロセスが加速される。この実施バリエーションでは、車両1は、車両8に対する追越プロセスは、抑制され、同時に、前方を走行中の貨物車両9に対する車両8の追越プロセスは、加速される、乃至、短縮される。
In the implementation variant shown here, the
ある可及的実施形態においては、車両1と車両8の双方のACCシステムが、交通の流れを最適化するために協力し合う。このコミュニケーションは、バックエンド・システムを介して、或いは、直接的に、双方の車両1, 8間の無線インターフェースを介して可能である。更に、貨物車両も本発明に係るACCシステムを装備している場合、ある可及的実施形態において、車両1の、車両8の、並びに貨物車両9のACCシステムどうしがコミュニケーションし、予め定められている最適化条件に基づいて、全ての関与している車両、特に車両1, 8, 9の交通の流れ、乃至、走行の流れを最適化する。このようなACCシステムの相互協力により、交通の流れが改善されるだけでなく、全ての交通参加者の安全も向上される。
In one possible embodiment, the ACC systems of both
更なる実施形態も可能である。例えば、認識された交通シチュエーション、乃至、追越シチュエーションは、様々なタイプの車両、及び/或いは、プライオリティも考慮することができる。例えば、車両1は、出動中の救急車、及び/或いは、警察車両であることができる。発信されるシグナル、例えば、消された回転灯などによって示されるこれらの車両の高いプライオリティが、ACCシステムを装備している他の車両の加速プロセス、及び/或いは、減速プロセスの設定の際に、認識され、エンジン、及び/又はブレーキの制御、乃至、帰還制御において考慮されることが可能である。ACCシステムを装備した車両の、救急車、及び/或いは、警察車両に対する特に顧慮ある挙動も、本発明に係る方法によって達成可能である。例えば、高いプライオリティをもった救急車が、無意味なブレーキや加速プロセスから解放され、それにより、運搬される人の安全、及び/或いは、健康が守られることも達成可能である。
Further embodiments are possible. For example, a recognized traffic situation or an overtaking situation can take into account various types of vehicles and / or priorities. For example, the
Claims (16)
(a) 車両(1)が、少なくとも一台のある車線の前方を走行している車両(3; 5; 7; 8)を、ある追越プロセスにおいて、追い越す可能性がある潜在的追越シチュエーションを認識するステップ(S1);並びに、
(b) 車両(1)が、合法的に前方を走行中の車両(3; 5; 7; 8)を追い越せる場合、自分の追越プロセスを加速する、並びに、車両(1)が、前方を走行中の車両(3; 5; 7; 8)を非合法的に追越しそうな場合は、或いは、前方を走行中の車両(3; 5; 7; 8)の追越プロセスを可能にするために自分の追越プロセスを阻止するステップ(S2)。 A method comprising the following steps to increase safety in the overtaking process of a vehicle (1) whose travel speed (V) is feedback controlled by an ACC system:
(A) Potential overtaking situations in which vehicle (1) may overtake a vehicle (3; 5; 7; 8) traveling in front of at least one lane in a certain overtaking process. Recognizing (S1); and
(B) If the vehicle (1) can overtake the vehicle (3; 5; 7; 8) that is legally traveling ahead, it accelerates its overtaking process, and the vehicle (1) If it is likely that the moving vehicle (3; 5; 7; 8) will be illegally overtaken, or to allow the overtaking process of the vehicle (3; 5; 7; 8) traveling ahead Step (S2) to prevent the overtaking process.
車両(1)が、少なくとも一台のある車線の前方を走行している車両(3; 5; 7; 8)を、ある追越プロセスにおいて、追い越す可能性がある潜在的追越シチュエーションを認識する認識ユニット、
但し、車両(1)が、合法的に前方を走行中の車両(3; 5; 7; 8)を追い越せる場合は、自分の追越プロセスは加速され、逆に、車両(1)が、前方を走行中の車両(3; 5; 7; 8)を非合法的に追越しそうな場合は、該追越プロセスは、阻止される。 A device comprising the following, which increases the safety in the overtaking process of the vehicle (1) whose travel speed is feedback controlled by the ACC system:
Vehicle (1) recognizes a potential overtaking situation that may overtake a vehicle (3; 5; 7; 8) traveling in front of at least one lane in a certain overtaking process Recognition unit,
However, if the vehicle (1) can overtake the vehicle (3; 5; 7; 8) that is legally traveling ahead, its own overtaking process is accelerated, and conversely, the vehicle (1) If it is likely that the vehicle (3; 5; 7; 8) traveling illegally will be overtaken illegally, the overtaking process will be blocked.
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102014209756 | 2014-05-22 | ||
| DE102014209756.8 | 2014-05-22 | ||
| DE102015206177 | 2015-04-07 | ||
| DE102015206177.9 | 2015-04-07 | ||
| PCT/DE2015/200289 WO2015176723A1 (en) | 2014-05-22 | 2015-04-30 | Method and device for increasing safety during an overtaking process of a vehicle |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017518913A true JP2017518913A (en) | 2017-07-13 |
| JP2017518913A5 JP2017518913A5 (en) | 2019-03-07 |
Family
ID=53385417
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016563160A Pending JP2017518913A (en) | 2014-05-22 | 2015-04-30 | Method and apparatus for improving safety during vehicle overtaking process |
Country Status (4)
| Country | Link |
|---|---|
| EP (1) | EP3145776A1 (en) |
| JP (1) | JP2017518913A (en) |
| DE (1) | DE112015001152A5 (en) |
| WO (1) | WO2015176723A1 (en) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016002893A (en) * | 2014-06-17 | 2016-01-12 | 富士重工業株式会社 | Travel control device of vehicle |
| KR20210013094A (en) * | 2018-12-18 | 2021-02-03 | 모셔널 에이디 엘엘씨 | Vehicle motion using multiple motion constraints |
| US11623645B2 (en) | 2021-03-24 | 2023-04-11 | Denso International America, Inc. | Vehicle behavior planning for overtaking vehicles |
| CN116331206A (en) * | 2023-04-06 | 2023-06-27 | 上海交通大学 | Decision method and system for intelligent automobile safe driving |
| US11899464B2 (en) | 2018-12-18 | 2024-02-13 | Motional Ad Llc | Operation of a vehicle using motion planning with machine learning |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN106004867B (en) * | 2016-05-31 | 2018-10-16 | 潍柴动力股份有限公司 | Lane change for hybrid-power bus is overtaken other vehicles control method and controller |
| JP6729220B2 (en) | 2016-09-08 | 2020-07-22 | トヨタ自動車株式会社 | Vehicle driving support device |
| CN108162963B (en) * | 2016-12-07 | 2022-10-28 | 福特环球技术公司 | Method and system for controlling a vehicle overtaken |
| DE102017209370B4 (en) | 2017-06-02 | 2021-10-28 | Audi Ag | Method for determining overtaking information |
| DE102017212172B4 (en) * | 2017-07-17 | 2021-01-28 | Audi Ag | Method for operating an overtaking assistance system for a motor vehicle and a motor vehicle |
| DE102018216364B4 (en) | 2018-09-25 | 2020-07-09 | Volkswagen Aktiengesellschaft | Method and device for supporting a lane change process for a vehicle |
| US11548506B2 (en) | 2019-02-05 | 2023-01-10 | Ford Global Technologies, Llc | Adaptive cruise control |
Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08238953A (en) * | 1994-12-13 | 1996-09-17 | Lucas Ind Plc | Equipment and method for cruise control |
| JP2001273596A (en) * | 2000-02-18 | 2001-10-05 | Daimlerchrysler Ag | Method and device for detecting and monitoring vehicles traveling ahead |
| JP2002012055A (en) * | 2000-04-14 | 2002-01-15 | Robert Bosch Gmbh | Vehicle speed control method |
| JP2003535765A (en) * | 2000-06-20 | 2003-12-02 | ダイムラークライスラー アーゲー | Method and system for adjusting the distance between a vehicle and another vehicle traveling ahead |
| JP2005096524A (en) * | 2003-09-22 | 2005-04-14 | Nissan Motor Co Ltd | Vehicular drive operation auxiliary device and vehicle equipped with the vehicular drive operation auxiliary device |
| JP2006513903A (en) * | 2003-02-20 | 2006-04-27 | ダイムラークライスラー・アクチェンゲゼルシャフト | Method for controlling the speed of a vehicle |
| JP2007512171A (en) * | 2003-11-19 | 2007-05-17 | ダイムラークライスラー・アクチェンゲゼルシャフト | Method for controlling longitudinal movement of a vehicle |
| JP2009208650A (en) * | 2008-03-04 | 2009-09-17 | Mazda Motor Corp | Travel control device of vehicle |
| JP2009543258A (en) * | 2006-07-12 | 2009-12-03 | アルカテル−ルーセント ユーエスエー インコーポレーテッド | Wireless communication to adjust the speed of transport |
| JP2012066690A (en) * | 2010-09-24 | 2012-04-05 | Fujitsu Ten Ltd | Vehicle control system, vehicle control apparatus, and vehicle control method |
| US8457827B1 (en) * | 2012-03-15 | 2013-06-04 | Google Inc. | Modifying behavior of autonomous vehicle based on predicted behavior of other vehicles |
| WO2014006770A1 (en) * | 2012-07-06 | 2014-01-09 | 本田技研工業株式会社 | Vehicle travel control apparatus |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102009048259A1 (en) * | 2009-10-05 | 2011-04-07 | Daimler Ag | Method for operating driver assistance system of passenger car, involves triggering control operation and/or warning when overhauling process is initiated and evaluated in driving route section with identified overhauling prohibition |
| DE102010054064A1 (en) * | 2010-12-10 | 2012-06-14 | GM Global Technology Operations LLC | Motor vehicle with a driver assistance system |
| GB2498223B (en) * | 2012-01-09 | 2015-08-26 | Jaguar Land Rover Ltd | Method and control unit for monitoring traffic |
| DE102012214979A1 (en) * | 2012-08-23 | 2014-02-27 | Robert Bosch Gmbh | Traction Assistant to optimize traffic flow (Traffic Flow Assistant) |
-
2015
- 2015-04-30 JP JP2016563160A patent/JP2017518913A/en active Pending
- 2015-04-30 WO PCT/DE2015/200289 patent/WO2015176723A1/en active Application Filing
- 2015-04-30 EP EP15728392.0A patent/EP3145776A1/en not_active Withdrawn
- 2015-04-30 DE DE112015001152.8T patent/DE112015001152A5/en active Pending
Patent Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08238953A (en) * | 1994-12-13 | 1996-09-17 | Lucas Ind Plc | Equipment and method for cruise control |
| JP2001273596A (en) * | 2000-02-18 | 2001-10-05 | Daimlerchrysler Ag | Method and device for detecting and monitoring vehicles traveling ahead |
| JP2002012055A (en) * | 2000-04-14 | 2002-01-15 | Robert Bosch Gmbh | Vehicle speed control method |
| JP2003535765A (en) * | 2000-06-20 | 2003-12-02 | ダイムラークライスラー アーゲー | Method and system for adjusting the distance between a vehicle and another vehicle traveling ahead |
| JP2006513903A (en) * | 2003-02-20 | 2006-04-27 | ダイムラークライスラー・アクチェンゲゼルシャフト | Method for controlling the speed of a vehicle |
| JP2005096524A (en) * | 2003-09-22 | 2005-04-14 | Nissan Motor Co Ltd | Vehicular drive operation auxiliary device and vehicle equipped with the vehicular drive operation auxiliary device |
| JP2007512171A (en) * | 2003-11-19 | 2007-05-17 | ダイムラークライスラー・アクチェンゲゼルシャフト | Method for controlling longitudinal movement of a vehicle |
| JP2009543258A (en) * | 2006-07-12 | 2009-12-03 | アルカテル−ルーセント ユーエスエー インコーポレーテッド | Wireless communication to adjust the speed of transport |
| JP2009208650A (en) * | 2008-03-04 | 2009-09-17 | Mazda Motor Corp | Travel control device of vehicle |
| JP2012066690A (en) * | 2010-09-24 | 2012-04-05 | Fujitsu Ten Ltd | Vehicle control system, vehicle control apparatus, and vehicle control method |
| US8457827B1 (en) * | 2012-03-15 | 2013-06-04 | Google Inc. | Modifying behavior of autonomous vehicle based on predicted behavior of other vehicles |
| WO2014006770A1 (en) * | 2012-07-06 | 2014-01-09 | 本田技研工業株式会社 | Vehicle travel control apparatus |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016002893A (en) * | 2014-06-17 | 2016-01-12 | 富士重工業株式会社 | Travel control device of vehicle |
| KR20210013094A (en) * | 2018-12-18 | 2021-02-03 | 모셔널 에이디 엘엘씨 | Vehicle motion using multiple motion constraints |
| KR102505300B1 (en) * | 2018-12-18 | 2023-03-02 | 모셔널 에이디 엘엘씨 | Behavior of vehicles using multiple motion constraints |
| KR20230035147A (en) * | 2018-12-18 | 2023-03-10 | 모셔널 에이디 엘엘씨 | Operation of a vehicle using multiple motion constraints |
| KR102616561B1 (en) * | 2018-12-18 | 2023-12-21 | 모셔널 에이디 엘엘씨 | Operation of a vehicle using multiple motion constraints |
| US11899464B2 (en) | 2018-12-18 | 2024-02-13 | Motional Ad Llc | Operation of a vehicle using motion planning with machine learning |
| US11623645B2 (en) | 2021-03-24 | 2023-04-11 | Denso International America, Inc. | Vehicle behavior planning for overtaking vehicles |
| CN116331206A (en) * | 2023-04-06 | 2023-06-27 | 上海交通大学 | Decision method and system for intelligent automobile safe driving |
| CN116331206B (en) * | 2023-04-06 | 2023-10-20 | 上海交通大学 | Decision method and system for intelligent automobile safe driving |
Also Published As
| Publication number | Publication date |
|---|---|
| DE112015001152A5 (en) | 2016-12-22 |
| WO2015176723A1 (en) | 2015-11-26 |
| EP3145776A1 (en) | 2017-03-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2017518913A (en) | Method and apparatus for improving safety during vehicle overtaking process | |
| US20170361841A1 (en) | Travel control device for vehicle | |
| US11858527B2 (en) | Control system for vehicle and control method for vehicle | |
| CN113954871A (en) | Testing predictions for autonomous vehicles | |
| CN111108031B (en) | Travel control device, vehicle, and travel control method | |
| JP6406164B2 (en) | Information transmission device, electronic control device, information transmission device, and electronic control system | |
| JP2019128765A (en) | Automated driving system | |
| US11364888B2 (en) | Driving assistance apparatus | |
| JP2017004471A (en) | Notification system | |
| JP2010158924A (en) | Inter-vehicle distance controller | |
| JP2018520045A (en) | Vehicle speed control method | |
| US20200223441A1 (en) | Vehicle, apparatus for controlling same, and control method therefor | |
| CN112654543A (en) | Method and device for securing a process of overtaking a bicycle-driving vehicle | |
| JP6870607B2 (en) | Autonomous driving system | |
| JP2017136968A (en) | Vehicle control device | |
| JP2007316827A (en) | Intersection traffic control system | |
| JP2020075606A (en) | Driving support device | |
| CN112334371B (en) | Longitudinally guided driver assistance system in a motor vehicle | |
| JP7302545B2 (en) | Driving support device | |
| JP2017204198A (en) | Drive support method and drive support system | |
| CN112046477A (en) | Vehicle control device, method for operating vehicle control device, vehicle, and storage medium | |
| JP5018411B2 (en) | Vehicle tracking device | |
| JP2020082749A (en) | Vehicle control apparatus | |
| CN115707333B (en) | Driving control method and driving control device | |
| JP7393258B2 (en) | Control device and vehicle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20180112 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180112 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180829 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20181122 |
|
| A524 | Written submission of copy of amendment under article 19 pct |
Free format text: JAPANESE INTERMEDIATE CODE: A524 Effective date: 20190124 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190306 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190604 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20191023 |