JP2017222014A - Teaching device - Google Patents
Teaching device Download PDFInfo
- Publication number
- JP2017222014A JP2017222014A JP2016120502A JP2016120502A JP2017222014A JP 2017222014 A JP2017222014 A JP 2017222014A JP 2016120502 A JP2016120502 A JP 2016120502A JP 2016120502 A JP2016120502 A JP 2016120502A JP 2017222014 A JP2017222014 A JP 2017222014A
- Authority
- JP
- Japan
- Prior art keywords
- substrate
- hand
- teaching
- guide pole
- teaching device
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Landscapes
- Manipulator (AREA)
- Container, Conveyance, Adherence, Positioning, Of Wafer (AREA)
Abstract
Description
本発明は、基板を搬送する搬送ロボットに対するティーチングに関する。 The present invention relates to teaching for a transfer robot that transfers a substrate.
基板を搬送する搬送ロボットにおいては、これに実際に搬送動作を行わせるのに先立って、搬送ロボットに基板の受け渡し位置等をティーチング(教示)する必要がある。搬送ロボットは、ティーチングされた位置情報に基づいて搬送動作を行うことになるため、このティーチングの精度が悪いと基板が所定の位置に精度よく配置されず、処理精度の悪化等につながってしまう。 In a transfer robot that transfers a substrate, it is necessary to teach (teach) the transfer position of the substrate to the transfer robot before actually carrying out the transfer operation. Since the transfer robot performs a transfer operation based on the taught position information, if the teaching accuracy is poor, the substrate is not accurately placed at a predetermined position, leading to deterioration of processing accuracy.
従来においては、このティーチングは例えば、作業者が、搬送ロボットのハンドの位置を目視や定規等を用いて確認しつつ当該ハンドの位置を微調整して、当該ハンドを目標とする受け渡し位置に配置し、当該位置を搬送ロボットに記憶させることによって行われていた。
しかしながら、目視で搬送ロボットのハンドを目標とする受け渡し位置に精度よく配置するには、作業者の熟練が必要とされる。また、熟練の作業者であってもこの作業には相当な時間がかかってしまう。
Conventionally, this teaching is performed, for example, by an operator confirming the position of the hand of the transfer robot by visual observation or using a ruler and finely adjusting the position of the hand and placing the hand at a target delivery position. However, this is performed by storing the position in the transport robot.
However, skill of an operator is required to accurately arrange the hand of the transfer robot at a target delivery position visually. Further, even a skilled worker takes a considerable amount of time for this work.
そこで、作業者の熟練に頼らずに精度よくティーチングを行うべく、治具を用いたティーチングの手法が各種提案されている(特許文献1〜3)。なかでも特許文献3には、一対の治具を用いて、これらをはめ合わせることでティーチングを行う手法が提案されている。
すなわち、特許文献3では、搬送ロボットのハンド(ウエハハンドリングロボット4のエンドエフェクター17)にハンド側治具(嵌合部42)を取り付けるとともに、ウエハカセットの載置位置(ウエハカセットポート6)に第2の治具(基板41)を配置する。エンドエフェクター17に取り付けられる嵌合部42の下面には下向きの凸部43が形成されており、ウエハカセットポート6に配置される基板41には、これがウエハカセットポート6に配置されたときに、ウエハカセット内におけるウエハの中心を通過する軸線と一致する軸線をもつような、円筒形の凹部41”が形成されている。
そして、エンドエフェクター17を移動させて凸部43と凹部41”が嵌合した状態とし、当該状態におけるエンドエフェクター17の位置(水平面内における位置および高さ位置)を、ウエハカセットに対する受け渡し位置として記憶する。
Therefore, various teaching methods using a jig have been proposed in order to perform teaching accurately without depending on the skill of the operator (
That is, in Patent Document 3, a hand side jig (fitting portion 42) is attached to the hand of the transfer robot (end effector 17 of the wafer handling robot 4) and the wafer cassette is placed at the mounting position (wafer cassette port 6). 2 jig | tool (board | substrate 41) is arrange | positioned. A downward projecting portion 43 is formed on the lower surface of the
Then, the end effector 17 is moved to bring the convex portion 43 and the
特許文献3に記載の態様において、エンドエフェクター17を移動させて凸部43と凹部41”が嵌合した状態とするにあたっては、まず、エンドエフェクター17を水平面内で移動させて、上方から見て嵌合部42の凸部43と基板41の凹部41”とが重なるような位置まで移動させる(水平移動工程)。そして、当該位置でエンドエフェクター17を下降させて、凸部43と凹部41”が嵌合する位置まで移動させる(昇降移動工程)。
In the aspect described in Patent Document 3, when the end effector 17 is moved so that the convex portion 43 and the
ところが、凸部43および凹部41”はエンドエフェクター17の裏面側(すなわち、上方から見てエンドエフェクター17の陰になる位置)に在るため、これらの位置関係を上方からの目視で確認することはできない。したがって、水平移動工程においては、側方からの目視のみを頼りに、凸部43と凹部41”とが上方から見て完全に重なるようにエンドエフェクター17の位置(水平面内における位置)を微調整しなければならない。このような位置調整には、熟練の作業者であっても相当な時間がかかってしまう。
However, since the convex portion 43 and the
また、昇降移動工程においては、凸部43と凹部41”とが完全に嵌合した状態(つまり、凸部43の頂面と凹部41”の底面とが当接した状態)となるように、エンドエフェクター17の位置(高さ位置)を微調整する必要があるが、凸部43の頂面と凹部41”の底面とが当接しているか否かを外部から目視で確認することはできない。したがって、高さ位置についてのティーチングの精度の信頼性が低いという問題がある。
In the up-and-down movement process, the convex portion 43 and the
このように、特許文献3に記載の態様では、ティーチングに要する時間を十分に短くすることが難しい。また、この態様では、ティーチングの精度が十分に保証されているとも言えない。 Thus, in the aspect described in Patent Document 3, it is difficult to sufficiently shorten the time required for teaching. In this aspect, it cannot be said that teaching accuracy is sufficiently guaranteed.
本発明が解決しようとする課題は、精度のよいティーチングを短時間で行うことができる技術を提供することである。 The problem to be solved by the present invention is to provide a technique capable of performing accurate teaching in a short time.
上記課題を解決するために成された本発明は、
基板をハンド上に載置して、該基板に平行な面の面内方向と面外方向に該基板を搬送する搬送ロボットに対して、基板を搬送するべき位置をティーチングするティーチング装置であって、
前記ハンドに設けられた、前記面に平行な断面が所定形状である特徴形状部分と、
基板搬送先に、前記面外方向に延在するように配置される柱状部材であって、前記面に平行な断面が前記所定形状に対応する形状であるガイドポールと、
前記ガイドポールの長手方向内の所定の位置に設けられたガイドポイントと、
を備える。
The present invention made to solve the above problems
A teaching device that places a substrate on a hand and teaches a position where the substrate should be transported to a transport robot that transports the substrate in an in-plane direction and an out-of-plane direction parallel to the substrate. ,
A feature-shaped portion provided in the hand and having a predetermined cross-section parallel to the surface;
A columnar member arranged to extend in the out-of-plane direction at the substrate transfer destination, and a guide pole whose cross section parallel to the surface is a shape corresponding to the predetermined shape;
A guide point provided at a predetermined position in the longitudinal direction of the guide pole;
Is provided.
このティーチング装置を用いてティーチングを行うにあたっては、まず、ガイドポールを基板搬送先に配置する。このとき、ガイドポールを、これに設けられたガイドポイントが、ティーチングするべきポイント(ティーチングポイント)と対応する位置(例えば、ティーチングポイントと重なるような位置、あるいは、ティーチングポイントと既知の位置関係にあるような位置)に配置する。
ハンドに設けられた特徴形状部分とガイドポールとは、基板に平行な面の面内において対応し合う断面形状となっているので、当該対応する断面形状部分で両者を接触させることにより、基板に平行な面の面内において、ハンドとガイドポールの位置関係を固定することができる。さらに、ガイドポールは、断面形状が一定の柱状部材であるので、当該接触状態のままでハンドをガイドポールに沿って(すなわち、基板に平行な面の面外方向に沿って)スライドさせることができる。そこで、ティーチングにあたっては、ハンドを、まずは基板に平行な面の面内において移動させて、特徴形状部分とガイドポールとを接触させ、ハンドの、基板に平行な面内における位置を決定する。続いて、当該接触状態のままでハンドをガイドポールに沿ってスライドさせて、ハンドの所定部分をガイドポイントに一致させ、ハンドの、基板に平行な面の面外方向の位置を決定する。これによって、基板に平行な面の面内と面外方向の両方において(すなわち、3次元位置において)、ハンドをティーチングポイントと対応する位置に、短時間で精確に位置合わせすることができる。そして、このときのハンドの位置を記憶することによって、搬送ロボットにティーチングポイントを教示することができる。
In performing teaching using this teaching apparatus, first, a guide pole is disposed at the substrate transfer destination. At this time, the guide pole provided on the guide pole has a position corresponding to the point to be taught (teaching point) (for example, a position overlapping the teaching point or a known positional relationship with the teaching point) Position).
Since the characteristic shape portion provided on the hand and the guide pole have a corresponding cross-sectional shape in a plane parallel to the substrate, by bringing them into contact with each other at the corresponding cross-sectional shape portion, The positional relationship between the hand and the guide pole can be fixed within the plane of the parallel plane. Further, since the guide pole is a columnar member having a constant cross-sectional shape, the hand can be slid along the guide pole (that is, along the out-of-plane direction parallel to the substrate) while maintaining the contact state. it can. In teaching, therefore, the hand is first moved in a plane parallel to the substrate to bring the characteristic shape portion and the guide pole into contact with each other to determine the position of the hand in the plane parallel to the substrate. Subsequently, the hand is slid along the guide pole in the contact state, a predetermined portion of the hand is made to coincide with the guide point, and the position of the hand parallel to the substrate is determined in the out-of-plane direction. Thus, the hand can be accurately aligned in a short time at a position corresponding to the teaching point in both the in-plane and out-of-plane directions of the plane parallel to the substrate (that is, at the three-dimensional position). Then, the teaching point can be taught to the transfer robot by storing the position of the hand at this time.
好ましくは、前記ティーチング装置において、
前記特徴形状部分が、円弧状に切り欠かれた凹部であり、
前記ガイドポールが円弧状に膨らんだ凸状断面を有する。
Preferably, in the teaching device,
The characteristic shape portion is a recess cut out in an arc shape;
The guide pole has a convex cross section that swells in an arc shape.
この構成によると、特徴形状部分とガイドポールを接触させて、基板に平行な面の面内において、ハンドとガイドポールの位置関係を固定する作業が容易である。また、ハンドをガイドポールに沿ってスムーズにスライドさせることができる。 According to this configuration, it is easy to fix the positional relationship between the hand and the guide pole in the plane parallel to the substrate by bringing the characteristic shape portion and the guide pole into contact with each other. In addition, the hand can be smoothly slid along the guide pole.
好ましくは、前記ティーチング装置において、
前記特徴形状部分が、円弧状に切り欠かれた凹部であり、
前記ガイドポールが、断面が円形状の棒である。
Preferably, in the teaching device,
The characteristic shape portion is a recess cut out in an arc shape;
The guide pole is a bar having a circular cross section.
この構成によると、特徴形状部分とガイドポールを接触させて、基板に平行な面の面内において、ハンドとガイドポールの位置関係を固定する作業が容易である。また、ハンドをガイドポールに沿ってスムーズにスライドさせることができる。 According to this configuration, it is easy to fix the positional relationship between the hand and the guide pole in the plane parallel to the substrate by bringing the characteristic shape portion and the guide pole into contact with each other. In addition, the hand can be smoothly slid along the guide pole.
好ましくは、前記ティーチング装置において、
前記特徴形状部分が、前記ハンドに着脱自在に取り付けられる治具に設けられている。
Preferably, in the teaching device,
The characteristic shape portion is provided on a jig that is detachably attached to the hand.
この構成によると、ハンドに、真空吸着用の吸引部や静電チャック用の電極等といった複雑な構造が設けられるために、ハンド自体に特徴形状部分を直接に設けることが難しい場合であっても、治具を介してハンドに間接的に特徴形状部分を設けることができる。 According to this configuration, even if it is difficult to directly provide the characteristic shape portion on the hand itself because the hand is provided with a complicated structure such as a vacuum suction unit or an electrostatic chuck electrode. The characteristic shape portion can be indirectly provided on the hand through the jig.
好ましくは、前記ティーチング装置において、
前記特徴形状部分が、前記ハンドに直接的に設けられている。
Preferably, in the teaching device,
The characteristic shape portion is provided directly on the hand.
この構成によると、ハンドに治具等を取り付ける手間を必要とせず、簡易にティーチングを行うことができる。 According to this configuration, teaching can be easily performed without the need for attaching a jig or the like to the hand.
ハンドに設けられた特徴形状部分をガイドポールと接触させ、その状態で、ハンドをガイドポールに沿ってスライドさせることで、ハンドをティーチングポイントに位置合わせするので、当該位置合わせを、短時間で精確に行うことができる。したがって、精度のよいティーチングを短時間で行うことが可能となる。 By contacting the characteristic shape part provided on the hand with the guide pole and sliding the hand along the guide pole in that state, the hand is aligned with the teaching point, so that the alignment can be accurately performed in a short time. Can be done. Therefore, accurate teaching can be performed in a short time.
以下、添付の図面を参照しながら、本発明の実施形態について説明する。以下の実施形態は、本発明を具体化した一例であって、本発明の技術的範囲を限定するものではない。 Hereinafter, embodiments of the present invention will be described with reference to the accompanying drawings. The following embodiment is an example embodying the present invention, and does not limit the technical scope of the present invention.
<1.基板処理装置100の構成>
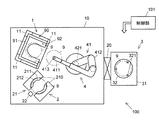
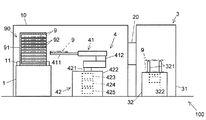
実施形態に係る基板処理装置100の全体構成について、図1、図2を参照しながら説明する。図1は、基板処理装置100の構成を模式的に示す平面図である。図2は、基板処理装置100の構成を模式的に示す側面図である。図2においては、説明の便宜上、基板処理装置100の一部の図示が省略されている。
<1. Configuration of
The overall configuration of the
基板処理装置100は、複数枚の基板(例えば、略円形の半導体基板)9を多段に収納した基板収容部(一般に、マガジンラック、カセット等とも呼ばれる)90が載置される載置台1と、基板9の回転位置を補正するアライメント部2と、基板9に対して定められた処理を施す処理部3と、これら各部90,2,3の間で基板9を搬送する搬送ロボット4を備える。載置台1、アライメント部2、および、搬送ロボット4は、インデクサ部10に配置され、インデクサ部10と処理部3とは、ゲートバルブ20を介して接続される。基板処理装置100はさらに、これが備える各部を制御する制御部101を備える。
The
<載置台1>
載置台1は、基板収容部90が載置される台である。基板収容部90は、複数枚の基板9を多段に収納する部材であり、背面壁および一対の側壁を備える筐体91と、その内部に等間隔で多段に設けられた複数の棚92とを備える。当該複数の棚92のそれぞれに、基板9が1枚ずつ載置される。各棚92はU字状の切り欠きが形成されており、これによって、棚92に対して搬送ロボット4が基板9を授受する際に棚92と搬送ロボット4のハンド411が干渉しないようになっている。
<
The mounting table 1 is a table on which the
載置台1の上面には、基板収容部90の位置を規制するための複数の規制部材11が設けられている。各規制部材11は、具体的には例えば、平面視がL字状の部材であり、基板収容部90における背面壁と側壁との角部分に相当する位置、および(または)、当該側壁における正面の壁面と内側の壁面との角部分に相当する位置、に設けられる。この構成において、基板収容部90が、当該角部分が規制部材11のL字状の部分に沿うように配置されることによって、基板収容部90が適切な位置に配置されるようになっている。
A plurality of regulating
<アライメント部2>
アライメント部2は、基板9を水平姿勢で保持する保持部21を備える。保持部21は、具体的には例えば、隙間をあけて対向配置された一対の保持具210を備える。各保持具210は、基板9の下面(具体的には、当該下面における周縁領域部分)に当接する水平な載置面211と、基板9の端面の一部分に当接する壁面212とを備える。壁面212は、上方から見て弧状に形成されており、その曲率半径は基板9の半径と略同一となっている。基板9は、上方から見て、中心が一対の保持具210の中心と一致するような位置において、一対の保持具210の各載置面211に水平姿勢で載置される。このとき、当該基板9は、一対の保持具210の各壁面212によって両側から位置規制された状態(すなわち、水平面内において位置ずれを起こさないように位置規制された状態)となる。この保持部21においては、一対の保持具210の間に隙間が存在するので、保持部21に対して搬送ロボット4が基板9を受け渡しする際に各保持具210とハンド411が干渉しないようになっている。
アライメント部2は、さらに、保持部21およびこれに保持された基板9をその中心を通る鉛直な回転軸の周りで回転させる回転駆動部(図示省略)と、当該回転される基板9の特徴部(具体的には例えば、基板9の周縁に形成されたノッチ、オリエンテーションフラット等)を検出する検出部22と、を備える。
<
The
The
このアライメント部2にて基板9の回転位置を補正する場合、まず、搬送ロボット4が、ハンド411に保持された基板9を保持部21上に載置する。続いて、回転駆動部が、保持部21およびこれに保持されている基板9を1回転させる。基板9が1回転する間に、検出部22が、基板9の周縁に形成されている特徴部を検出する。特徴部が検出されると、回転駆動部が、当該特徴部が定められた方向に配置されるように、保持部21およびこれに保持されている基板9を回転させる。これによって、基板9の回転位置が補正される。
When correcting the rotation position of the
<処理部3>
処理部3は、基板9に定められた処理(この実施形態では、例えばプラズマ処理)を行う。処理部3は、処理チャンバー31と、その内部に配置された載置部32を備える。載置部32は、上方から見て円形の平板状の部材であり、その上面に、基板9が水平姿勢で載置される。載置部32には、その上面に対して出没可能に設けられた一群(図の例では、3個)のリフトピン321と、当該一群のリフトピン321を同期して出没させるリフトピン駆動機構322と、が設けられる。一群のリフトピン321は、載置部32に載置された基板9の下面の周縁領域と上方から見て重なる領域に、好ましくは等間隔で配列される。
処理部3は、さらに、処理チャンバー31内に各種の処理ガスを供給するガス供給部、処理チャンバー31内にプラズマを生成するためのプラズマ生成部、処理チャンバー31内の圧力を調整する排気部、等を備える(いずれも、図示省略)。
<Processing unit 3>
The processing unit 3 performs processing (for example, plasma processing in this embodiment) defined on the
The processing unit 3 further includes a gas supply unit that supplies various processing gases into the
この処理部3にて基板9に処理を施す場合、まず、搬送ロボット4が、ハンド411に保持された基板9を載置部32上に載置する。続いて、ゲートバルブ20が閉鎖されて処理チャンバー31が気密にされた上で、排気部が処理チャンバー31内を排気する。そして、ガス供給部が処理チャンバー31内に定められた処理ガスを供給するとともに、プラズマ生成部が処理チャンバー31内にプラズマを生成する。これによって、載置部32に載置された基板9に対するプラズマ処理(例えば、プラズマエッチング、プラズマアッシング、プラズマスパッタリング、プラズマ蒸着、プラズマCVD、等の処理)が行われる。もっとも、処理部3で行われる処理は必ずしもプラズマ処理である必要はなく、プラズマを用いない各種の処理(例えば、エッチング、アッシング、スパッタリング、蒸着、CVD、加熱、冷却、薬液塗布、洗浄等の処理)が行われてもよい。
When processing the
<搬送ロボット4>
搬送ロボット4は、ハンド411上に基板9を載置して、ハンド411を基板9の主面に平行な面(ここでは、水平面)の面内方向(ここでは、水平方向)と面外方向(ここでは、鉛直方向)に移動させて、基板9を目的とする位置まで搬送する装置であり、搬送アーム41と、これを駆動する駆動機構42とを備える。
<Transport robot 4>
The transfer robot 4 places the
搬送アーム41は、1枚の基板9を支持する細長い板状のハンド411と、ハンド411と連結された多関節機構412と、を備える。ハンド411の上面であって、その上に基板9が載置されたときに基板9の下面の中央付近と対向する位置には、同心に配置された半径の異なる2個の円の円周に沿う溝から構成される吸引部413が形成されている。吸引部413は、バルブが介挿された真空ライン(図示省略)と接続されている。ハンド411の上に基板9が載置された状態でこのバルブが開放されると、真空ラインとハンド411の吸引部413が連通され、吸引部413が基板9を真空吸引し、基板9がハンド411上に固定的に保持(吸引保持)される。
The
駆動機構42は、搬送アーム41における多関節機構412の端部(ハンド411が接続された側と逆側の端部)と連結された軸部421を備える。この軸部421は鉛直に延在して、下端においてアームステージ422と連結されている。アームステージ422には、各種の駆動機構(具体的には、軸部421を回転させる回転駆動機構423、軸部421を伸縮させる昇降駆動機構424、および、多関節機構412を屈伸させる屈伸駆動機構425)が収容されている。回転駆動機構423が軸部421を回転させることによって、搬送アーム41が軸部421を中心に旋回する。昇降駆動機構424が軸部421を伸縮させることによって、搬送アーム41が昇降する。屈伸駆動機構425が多関節機構412を屈伸させることによって、搬送アーム41のハンド411が水平面内で搬送アーム41の旋回半径方向(すなわち、軸部421に対して近接あるいは離間する方向)に進退移動する。
The
上記の構成によって、搬送ロボット4は、ハンド411を、水平面内で旋回させることができ、当該旋回半径方向に沿った進退移動をさせることができ、さらに、昇降移動させることができる。つまり、ハンド411を、基板9の主面に平行な面の面内方向と面外方向に移動させることができる。
With the above-described configuration, the transfer robot 4 can turn the
搬送ロボット4は、制御部101の制御下でハンド411を移動させて、これを各載置台1に載置された基板収容部90、アライメント部2、および、処理部3の各々にアクセスさせて、当該各部90,2,3の間で基板9を搬送する。
The transfer robot 4 moves the
<2.ティーチング装置10>
次に、搬送ロボット4に、基板9を搬送するべき位置のティーチングを行うティーチング装置10について説明する。ティーチング装置10は、ハンド411に直接的にあるいは間接的に設けられた特徴形状部分53と、基板9の搬送先に配置される治具6,7,8とを備える。
<2.
Next, the
<2−1.特徴形状部分53>
<i.特徴形状部分53をハンド411に間接的に設ける態様>
特徴形状部分53は、例えば、ハンド411に脱着自在に取り付けられる治具(以下、「ハンド側治具」ともいう)5に形成される。この場合、ハンド411にハンド側治具5が取り付けられることによって、ハンド411に特徴形状部分53が間接的に設けられることになる。
<2-1.
<I. Mode in which the
The
ハンド側治具5について、図3を参照しながら説明する。図3(a)は、ハンド側治具5の上面図および側面図である。図3(b)は、別の形態に係るハンド側治具5の上面図である。図3(c)は、ハンド側治具5がハンド411に取り付けられた状態を示す図である。
The hand side jig |
ハンド側治具5は、ハンド411の先端部分に対して着脱自在に構成されており、ティーチングを行う際にはハンド411の先端部分に取り付けられて用いられる。具体的には、ハンド側治具5は、上方から見てハンド411の先端よりも一回り大きな形状の板状部材51を備え、ハンド411の先端部分に、上側から板状部材51を被せることによって、ハンド側治具5がハンド411に取り付けられる。板状部材51の裏面には、これがハンド411に被せられたときにハンド411の先端部分の側面に沿うような周壁部52が形成されており、この周壁部52がハンド411の先端部分の側面に当接することによって、ハンド側治具5とハンド411とが互いに位置ずれを起こさないように位置規制される。
The
板状部材51には、図3(b)に示されるように、周壁部52とハンド411とが当接し合う部分に窓部510を設けてもよい。この構成によると、窓部510から、周壁部52とハンド411との位置関係を確認することができる。すなわち、窓部510内を視認して、周壁部52とハンド411とが当接し合っていることが確認できれば、ハンド側治具5が適切にハンド411に取り付けられていると判断することができる。
As shown in FIG. 3B, the plate-
ハンド側治具5の表面には、特徴形状部分53が形成される。この特徴形状部分53は、基板9(ハンド411に保持された状態の基板9)の主面と平行な断面が円弧状の形状部分であり、具体的には、円弧状に切り欠かれた凹部である。この円弧は、中心角が90°以上かつ180°以下の円弧状であることが好ましく、特に、中心角が180°の円弧(つまりは半円)であることが好ましい。また、この特徴形状部分53は、ハンド側治具5の側面であって、ハンド411の最先端部分と対応する位置に形成されることが好ましい。
A
<ii.特徴形状部分53をハンド411に直接的に設ける態様>
特徴形状部分53は、ハンド411に直接に形成されていてもよい。
この場合も、ハンド側治具5に特徴形状部分53を形成する場合と同様、特徴形状部分53は、基板9(ハンド411に保持された状態の基板9)の主面と平行な断面が円弧状の形状部分であり、具体的には、円弧状に切り欠かれた凹部とすることができる。例えば、図3(d)に示されるように、ハンド411の側面であって、ハンド411の最先端部分に、円弧状に切り欠かれた凹部を形成することによって、特徴形状部分53を形成することができる。
<Ii. Mode in which the
The
Also in this case, as in the case where the
<2−2.治具6,7,8>
次に、特徴形状部分53と対にして用いられる治具6,7,8について説明する。当該治具6,7,8は、基板9の搬送先(すなわち、ティーチングするべき位置)に応じたものとなっている。
以下においては、載置部1に載置された収容部90の各棚92上に基板9を搬送するときの搬送位置のティーチングに用いられる治具(以下「載置台用治具」ともいう)6、アライメント部2の保持部21上に基板9を搬送するときの搬送位置のティーチングに用いられる治具(以下「アライメント部用治具」ともいう)7、および、処理部3の載置部32上に基板9を搬送するときの搬送位置のティーチングに用いられる治具(以下「処理部用治具」ともいう)8、のそれぞれについて、説明する。
<2-2.
Next, the
In the following, a jig used for teaching the transfer position when the
<2−2−1.載置台用治具6>
載置台用治具6について、図4を参照しながら説明する。図4(a)は、載置台用治具6の上面図および側面図である。図4(b)は、載置台用治具6が載置台1上に載置された状態を示す図である。図4(c)は、載置台用治具6を用いたティーチングの態様を説明するための図である。
<2-2-1. Mounting
The mounting
<a.構成>
載置台用治具6は、ベース部61と、これに立設されたガイドポール62と、ガイドポール62の長手方向内の所定位置に形成されたガイドポイント63と、を備える。
<A. Configuration>
The mounting
ベース部61は、上方から見て基板収容部90とほぼ同じサイズの板状部材である。ティーチングの際には、このベース部61が、載置台1における基板収容部90が載置される位置に載置される。ベース部61は、好ましくは、載置台1上に設けられている各規制部材11のL字状部分に沿うような形状部分611を備える。これによって、ベース部61を、載置台1上における基板収容部90が載置される位置に正確に載置することが可能となる。
The
ガイドポール62は、柱状部材であり、ベース部61の表面の法線方向に延在して、下端がベース部61に固定される。ガイドポール62は、ベース部61が載置台1上に載置されたときに、当該載置台1上に正しく載置された基板収容部90の各棚92に正しく載置された基板9の中心を通る鉛直軸と重なるような位置に形成される。
ガイドポール62は、当該基板9の主面と平行な断面の形状(すなわち、長手方向と直交する方向で切断した断面の形状)が一定であり、当該断面形状は、特徴形状部分53と対応する形状となっている。上述したとおり、この実施の形態では、特徴形状部分53は円弧状に切り欠かれた凹部であるところ、ガイドポール62は断面が円形の棒により形成され、当該円の半径が特徴形状部分53の円弧の曲率半径と一致するようなものとなっている。
The
The
ガイドポイント63は、ガイドポール62の長手方向内の所定の位置を示すものであり、具体的には例えば、ガイドポール62の長手方向と直交する方向に延在するけがき線により形成される。ガイドポイント63は、ベース部61が載置台1上に載置されたときに、当該載置台1上に正しく載置された基板収容部90の各棚92のうちから選択された1個の棚92(例えば、上下方向において真ん中の棚92であり、以下「対象棚92」ともいう)に正しく載置された基板9の表面を通る水平面と重なるような位置に形成される。
The
<b.ティーチングの態様>
載置台用治具6を用いてティーチングを行う態様について説明する。この場合のティーチングポイントは、載置部1に正しく載置された収容部90における対象棚92上に正しく載置された基板9の位置である。当該ティーチングポイントが特定されることによって、対象棚92に基板9を正しい位置で受け渡すことができるようなハンド411の位置が特定される。つまり、対象棚92に対する基板9の受け渡し位置がティーチングされる。
<B. Teaching mode>
A mode in which teaching is performed using the mounting
まず、載置台用治具6のベース部61を、載置台1上における基板収容部90が載置される位置に載置する。上述したとおり、このとき、ガイドポール62が、載置部1に載置された収容部90の対象棚92に載置される基板9の中心を通る鉛直軸と重なるような位置に配置され、ガイドポイント63が、当該基板9の表面を通る水平面と重なるような位置に配置される。つまり、ガイドポイント63が、ティーチングポイントと重なる位置に配置される。
First, the
続いて、ハンド側治具5が取り付けられることによって特徴形状部分53が間接的に形成されたハンド411(図3(c))、あるいは、特徴形状部分53が直接的に形成されているハンド411(図3(d))を、水平面内において移動させて、特徴形状部分53とガイドポール62とが接触した状態(具体的には、噛み合った状態)として、水平面内においてハンド411とガイドポール62の位置関係を固定する(図4(c)の上面図)。これにより、ハンド411の水平面内における位置が決定される。さらに、当該噛み合った状態のままでハンド411を昇降させて(すなわち、ガイドポール62に沿ってスライドさせて)、ハンド411あるいはハンド側治具5の例えば上面がガイドポイント63に配置された状態とする(図4(c)の側面図)。これにより、ハンド411の鉛直方向の位置が決定され、水平面内と鉛直方向の両方において(すなわち、3次元位置において)、ハンド411がティーチングポイントに位置合わせされた状態となる。
Subsequently, the
ハンド411がティーチングポイントに位置合わせされると、このときのハンド411の位置を制御部101の記憶装置に記憶する。これによって、ティーチングポイントが特定され、当該特定されたティーチングポイントに基づいて、対象棚92に対する基板9の受け渡し位置がティーチングされる。ここではさらに、当該ティーチングされた受け渡し位置に基づいて、他の全ての棚92に対する基板9の受け渡し位置が計算により算出されて記憶される。
When the
<2−2−2.アライメント部用治具7>
アライメント部用治具7について、図5を参照しながら説明する。図5(a)は、アライメント部用治具7の上面図および側面図である。図5(b)は、アライメント部用治具7が保持部21上に載置された状態を示す図である。図5(c)は、アライメント部用治具7を用いたティーチングの態様を説明するための図である。
<2-2-2.
The
<a.構成>
アライメント部用治具7は、ベース部71と、これに立設されたガイドポール72と、ガイドポール72の長手方向内の所定位置に形成されたガイドポイント73と、を備える。
<A. Configuration>
The
ベース部71は、上方から見て基板9とほぼ同じサイズの板状部材である。ティーチングの際には、このベース部71が、アライメント部2の保持部21上に載置される。具体的には、ベース部71は、上方から見て、中心が一対の保持具210の中心と一致するような位置において、一対の保持具210の各載置面211上に水平姿勢で載置される。ベース部71は上方から見て基板9とほぼ同じサイズであるので、このときに、ベース部71は、一対の保持具210の各壁面212によって両側から位置規制された状態(すなわち、水平面内において位置ずれを起こさないように位置規制された状態)となる。
The
ガイドポール72は、柱状部材であり、ベース部71の表面の法線方向に延在して、下端がベース部71に固定される。ガイドポール72は、ベース部71が保持部21上に載置されたときに、保持部21に正しく保持された基板9の中心を通る鉛直軸と重なるような位置に、形成される。
ガイドポール72は、当該基板9の主面と平行な断面の形状(すなわち、長手方向と直交する方向で切断した断面の形状)が一定であり、当該断面形状は、特徴形状部分53と対応する形状となっている。上述したとおり、この実施の形態では、特徴形状部分53は円弧状に切り欠かれた凹部であるところ、ガイドポール72は断面が円形の棒により形成され、当該円の半径が特徴形状部分53の円弧の曲率半径と一致するようなものとなっている。
The
The
ガイドポイント73は、ガイドポール72の長手方向内の所定の位置を示すものであり、具体的には例えば、ガイドポール72の長手方向と直交する方向に延在するけがき線により形成される。ガイドポイント73は、ベース部71が保持部21上に載置されたときに、保持部21に正しく保持される基板9の表面を通る水平面と平行な面であって、当該水平面との離間距離が既知である面(対象面)と重なるような位置に形成される。
The
<b.ティーチングの態様>
アライメント部用治具7を用いてティーチングを行う態様について説明する。この場合のティーチングポイントは、保持部21に正しく保持された基板9の位置と既知の関係にある位置である。当該ティーチングポイントが特定されることによって、保持部21に基板9を正しい位置で受け渡すことができるようなハンド411の位置が特定される。つまり、保持部21に対する基板9の受け渡し位置がティーチングされる。
<B. Teaching mode>
A mode in which teaching is performed using the
まず、アライメント部用治具7のベース部71を、保持部21上に載置する(図5(b))。上述したとおり、このとき、ガイドポール72が、保持部21に保持される基板9の中心を通る鉛直軸と重なるような位置に配置され、ガイドポイント73が、当該基板9の表面を通る水平面と既知の位置関係にある対象面と重なるような位置に配置される。つまり、ガイドポイント73が、ティーチングポイントと重なる位置に配置される。
First, the
続いて、ハンド側治具5が取り付けられることによって特徴形状部分53が間接的に形成されたハンド411(図3(c))、あるいは、特徴形状部分53が直接的に形成されているハンド411(図3(d))を、水平面内において移動させて、特徴形状部分53とガイドポール72とが噛み合った状態として、水平面内においてハンド411とガイドポール72の位置関係を固定する(図5(c)の上面図)。これにより、ハンド411の水平面内における位置が決定される。さらに、当該噛み合った状態のままでハンド411を昇降させて(すなわち、ガイドポール72に沿ってスライドさせて)、ハンド411あるいはハンド側治具5の例えば上面がガイドポイント73に配置された状態とする(図5(c)の側面図)。これにより、ハンド411の鉛直方向の位置が決定され、水平面内と鉛直方向の両方において(すなわち、3次元位置において)、ハンド411がティーチングポイントに位置合わせされた状態となる。
Subsequently, the
ハンド411がティーチングポイントに位置合わせされると、このときのハンド411の位置を制御部101の記憶装置に記憶する。これによって、ティーチングポイントが特定され、当該特定されたティーチングポイントに基づいて、保持部21に対する基板9の受け渡し位置がティーチングされる。
When the
<2−2−3.処理部用治具8>
処理部用治具8について、図6を参照しながら説明する。図6(a)は、処理部用治具8の斜視図である。図6(b)は、処理部用治具8が載置部32上に載置された状態を示す図である。図6(c)は、処理部用治具8を用いたティーチングの態様を説明するための図である。
<2-2-3.
The
<a.構成>
処理部用治具8は、ベース部81と、これに立設されたガイドポール82と、ガイドポール82の長手方向内の所定位置に形成されたガイドポイント83と、を備える。
<A. Configuration>
The
ベース部81は、複数のリフトピン収容部811と、これらを連結して一体的に支持する薄板状の支持部812と、を備える。各リフトピン収容部811は、上端が支持材812と連結された筒状の部材であり、載置部32が備える一群のリフトピン321のそれぞれと対応する位置に配置されている。具体的には、この実施形態においては、各リフトピン321は三角形の頂点に相当する位置に配置されており、これに対応して、各リフトピン収容部811も三角形の頂点に相当する位置に配置される。すなわち、支持部812は、当該三角形の2つの辺に沿うような屈曲した形状部分813を備え、その両端点および屈曲部分に、リフトピン収容部811が連結される。また、支持部812は、当該形状部分813の各端点と屈曲部分との中間位置を連結する連結部分814を備え、ここに、後述するガイドポール82が固定される。
ベース部81が載置部32上に載置された状態において、各リフトピン収容部811が各リフトピン321に上側から被さり、各リフトピン321の先端部分が各リフトピン収容部811の筒内部に収容された状態となる。これによって、ベース部81は、水平面内において位置ずれを起こさないように位置規制された状態となる。
The
In a state where the
ガイドポール82は、柱状部材であり、側面において支持部材812の連結部分814の側面に固定されて、支持部材812の表面の法線方向に延在するように配置される。ガイドポール82は、ベース部81が載置部32上に載置されたときに、載置部32に正しく載置された基板9の中心を通る鉛直軸と重なるような位置に、形成される。
ガイドポール82は、当該基板9の主面と平行な断面の形状(すなわち、長手方向と直交する方向で切断した断面の形状)が一定であり、当該断面形状は、特徴形状部分53と対応する形状となっている。上述したとおり、この実施の形態では、特徴形状部分53は円弧状に切り欠かれた凹部であるところ、ガイドポール82は、円弧状に膨らんだ凸状断面を有する棒状部材(具体的には、断面が半長円(すなわち、長円(二つの等しい長さの平行線と二つの半円形からなる図形)を、その平行線と直交する分割線に沿って半分に分割した形状)の棒状部材)により形成され、当該円弧状の部分の曲率半径が、特徴形状部分53の円弧の曲率半径と一致するようなものとなっている。
The
The
ガイドポイント83は、ガイドポール82の長手方向内の所定の位置を示すものであり、具体的には例えば、ガイドポール82の長手方向と直交する方向に延在するけがき線により形成される。ガイドポイント83は、ベース部81が載置部32上に載置されたときに、載置部32上に正しく載置された基板9の表面を通る水平面(あるいは、当該水平面と平行であって、当該水平面との離間距離が既知である面であってもよい)と重なるような位置に形成される。
The
<b.ティーチングの態様>
アライメント部用治具7を用いてティーチングを行うに態様について説明する。この場合のティーチングポイントは、載置部32に正しく載置された基板9の位置(あるいは、当該位置と既知の関係にある位置)である。当該ティーチングポイントが特定されることによって、載置部32に基板9を正しい位置で受け渡すことができるようなハンド411の位置が特定される。つまり、載置部32に対する基板9の受け渡し位置がティーチングされる。
<B. Teaching mode>
A mode for performing teaching using the
まず、アライメント部用治具7のベース部材81を載置部32上に載置して、各リフトピン収容部811が各リフトピン321に上側から被さって各リフトピン321の先端部分が各リフトピン収容部811の筒内部に収容された状態とする(図6(b))。上述したとおり、このとき、ガイドポール82が、載置部32に載置される基板9の中心を通る鉛直軸に重なるような位置に配置され、ガイドポイント83が、当該基板9の表面を通る水平面と重なるような位置に配置される。つまり、ガイドポイント83が、ティーチングポイントと重なる位置に配置される。
First, the
続いて、ハンド側治具5が取り付けられることによって特徴形状部分53が間接的に形成されたハンド411(図3(c))、あるいは、特徴形状部分53が直接的に形成されているハンド411(図3(d))を、水平面内において移動させて、特徴形状部分53とガイドポール82とが噛み合った状態として、水平面内においてハンド411とガイドポール82の位置関係を固定する(図6(c)の上面図)。これにより、ハンド411の水平面内における位置が決定される。さらに、当該噛み合った状態のままでハンド411を昇降させて(すなわち、ガイドポール82に沿ってスライドさせて)、ハンド411あるいはハンド側治具5の例えば上面がガイドポイント83に配置された状態とする(図6(c)の側面図)。これにより、ハンド411の鉛直方向の位置が決定され、水平面内と鉛直方向の両方において(すなわち、3次元位置において)、ハンド411がティーチングポイントに位置合わせされた状態となる。
Subsequently, the
ハンド411がティーチングポイントに位置合わせされると、このときのハンド411の位置を制御部101の記憶装置に記憶する。これによって、ティーチングポイントが特定され、当該特定されたティーチングポイントに基づいて、載置部32に対する基板9の受け渡し位置がティーチングされる。
When the
<3.変形例>
上記に例示したティーチング装置10は、特徴形状部分53が円弧状に切り欠かれた凹部であり、これと対になって用いられる各治具6,7,8が円弧状に膨らんだ凸状断面を有するものとしたが、各部の形状の組み合わせはこれに限らない。例えば、特徴形状部分53が、円弧状に膨らんだ凸部であり、これと対になって用いられる各治具6,7,8が当該円弧の曲率半径と一致するような曲率半径の円弧状に凹んだ凹状断面を有するものであってもよい。
<3. Modification>
The
上記に例示した各治具6,7,8において、ガイドポイント63,73,83は、ガイドポール部61,71,81の延在途中に形成されたけがき線により構成されていたが、ガイドポイントの構成例はそれに限らない。例えば、ガイドポール部61,71,81の上端位置が、ガイドポイントを構成してもよい。
In the
上記の実施形態では、ガイドポイント63,73,83が、ティーチングポイントと重なる位置に配置されていたが、ガイドポイント63,73,83は必ずしもティーチングポイントと重なる位置に配置される必要はない。例えば、ガイドポイント63,73,83は、ティーチングポイントから離れた位置であってティーチングポイントと既知の位置関係にあるような位置に配置されてもよい。 In the above-described embodiment, the guide points 63, 73, and 83 are arranged at positions that overlap the teaching points. However, the guide points 63, 73, and 83 are not necessarily arranged at positions that overlap the teaching points. For example, the guide points 63, 73, 83 may be arranged at positions that are away from the teaching point and have a known positional relationship with the teaching point.
上記に例示したティーチング装置10は、上記に例示した位置以外の各種の位置のティーチングに適用することができる。
The
上記に例示したティーチング装置10は、上記に例示した構成以外の各種の基板処理装置のティーチングに用いることができる。
The
1 載置台
2 アライメント装置
21 保持部
3 処理部
32 載置部
322 リフトピン
4 搬送ロボット
41 搬送アーム
411 ハンド
5 ハンド側治具
53 特徴形状部分
6 載置台用治具
7 アライメント部用治具
8 処理部用治具
61,71,81 ベース部
62,72,82 ガイドポール
63,73,83 ガイドポイント
10 ティーチング装置
100 基板処理装置
101 制御部
DESCRIPTION OF
Claims (5)
前記ハンドに設けられた、前記面に平行な断面が所定形状である特徴形状部分と、
基板搬送先に、前記面外方向に延在するように配置される柱状部材であって、前記面に平行な断面が前記所定形状に対応する形状であるガイドポールと、
前記ガイドポールの長手方向内の所定の位置に設けられたガイドポイントと、
を備える、ティーチング装置。 A teaching device that places a substrate on a hand and teaches a position where the substrate should be transported to a transport robot that transports the substrate in an in-plane direction and an out-of-plane direction parallel to the substrate. ,
A feature-shaped portion provided in the hand and having a predetermined cross-section parallel to the surface;
A columnar member arranged to extend in the out-of-plane direction at the substrate transfer destination, and a guide pole whose cross section parallel to the surface is a shape corresponding to the predetermined shape;
A guide point provided at a predetermined position in the longitudinal direction of the guide pole;
A teaching device.
前記特徴形状部分が、円弧状に切り欠かれた凹部であり、
前記ガイドポールが円弧状に膨らんだ凸状断面を有する、
ティーチング装置。 The teaching device according to claim 1,
The characteristic shape portion is a recess cut out in an arc shape;
The guide pole has a convex cross section swelled in an arc shape,
Teaching device.
前記特徴形状部分が、円弧状に切り欠かれた凹部であり、
前記ガイドポールが、断面が円形状の棒である、
ティーチング装置。 The teaching device according to claim 1 or 2,
The characteristic shape portion is a recess cut out in an arc shape;
The guide pole is a rod having a circular cross section,
Teaching device.
前記特徴形状部分が、前記ハンドに脱着自在に取り付けられる治具に設けられている、
ティーチング装置。 The teaching device according to any one of claims 1 to 3,
The characteristic shape portion is provided in a jig that is detachably attached to the hand.
Teaching device.
前記特徴形状部分が、前記ハンドに直接的に設けられている、
ティーチング装置。 The teaching device according to any one of claims 1 to 3,
The characteristic shape portion is provided directly on the hand,
Teaching device.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016120502A JP2017222014A (en) | 2016-06-17 | 2016-06-17 | Teaching device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016120502A JP2017222014A (en) | 2016-06-17 | 2016-06-17 | Teaching device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017222014A true JP2017222014A (en) | 2017-12-21 |
| JP2017222014A5 JP2017222014A5 (en) | 2019-04-11 |
Family
ID=60685884
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016120502A Pending JP2017222014A (en) | 2016-06-17 | 2016-06-17 | Teaching device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017222014A (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114550513A (en) * | 2022-03-04 | 2022-05-27 | 河北科技师范学院 | General display device of education and teaching |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10156774A (en) * | 1996-12-02 | 1998-06-16 | Kokusai Electric Co Ltd | Method for teaching substrate-mounted machine |
| JPH11254359A (en) * | 1998-03-12 | 1999-09-21 | Toyota Autom Loom Works Ltd | Member conveyance system |
| JP2002018753A (en) * | 2000-06-29 | 2002-01-22 | Asm Japan Kk | Device and method for teaching wafer handling robot |
| JP2005260176A (en) * | 2004-03-15 | 2005-09-22 | Kawasaki Heavy Ind Ltd | Position information acquiring method of conveying position of conveying apparatus |
| WO2011001675A1 (en) * | 2009-06-30 | 2011-01-06 | 株式会社アルバック | Device for teaching robot and method for teaching robot |
| JP2014148031A (en) * | 2013-02-04 | 2014-08-21 | Dainippon Screen Mfg Co Ltd | Delivery position instruction method, delivery position instruction device, and substrate treatment apparatus |
-
2016
- 2016-06-17 JP JP2016120502A patent/JP2017222014A/en active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH10156774A (en) * | 1996-12-02 | 1998-06-16 | Kokusai Electric Co Ltd | Method for teaching substrate-mounted machine |
| JPH11254359A (en) * | 1998-03-12 | 1999-09-21 | Toyota Autom Loom Works Ltd | Member conveyance system |
| JP2002018753A (en) * | 2000-06-29 | 2002-01-22 | Asm Japan Kk | Device and method for teaching wafer handling robot |
| JP2005260176A (en) * | 2004-03-15 | 2005-09-22 | Kawasaki Heavy Ind Ltd | Position information acquiring method of conveying position of conveying apparatus |
| WO2011001675A1 (en) * | 2009-06-30 | 2011-01-06 | 株式会社アルバック | Device for teaching robot and method for teaching robot |
| JP2014148031A (en) * | 2013-02-04 | 2014-08-21 | Dainippon Screen Mfg Co Ltd | Delivery position instruction method, delivery position instruction device, and substrate treatment apparatus |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN114550513A (en) * | 2022-03-04 | 2022-05-27 | 河北科技师范学院 | General display device of education and teaching |
| CN114550513B (en) * | 2022-03-04 | 2024-04-26 | 青皮科技(广州)有限公司 | General display device of education and teaching |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR101745045B1 (en) | Method for positioning a transfer unit, method for calculating positional deviation amount of an object to be processed, and method for correcting teaching data of the trasnfer unit | |
| JP6058004B2 (en) | System with multi-linkage robot and method for correcting position and rotational alignment in multi-linkage robot | |
| JP5721469B2 (en) | Component mounting method and component mounting apparatus | |
| US6678581B2 (en) | Method of calibrating a wafer edge gripping end effector | |
| TW201621499A (en) | Robot system, robot teaching method and robot teaching apparatus therefor | |
| TW201714145A (en) | Vision-based wafer notch position measurement | |
| JP6148025B2 (en) | Delivery position teaching method, delivery position teaching apparatus, and substrate processing apparatus | |
| JP6302275B2 (en) | Transfer robot and teaching system | |
| US20190013220A1 (en) | Substrate processing device | |
| WO2011001675A1 (en) | Device for teaching robot and method for teaching robot | |
| JP4849825B2 (en) | Processing apparatus, alignment method, control program, and computer storage medium | |
| KR101915878B1 (en) | Substrate transfer teaching method and substrate processing system | |
| US20190148210A1 (en) | Substrate transfer hand and robot | |
| TW201702160A (en) | Conveying system, conveying robot and teaching method of the same | |
| JP2011183492A (en) | Automatic positional dislocation correcting method and automatic position teaching method | |
| TW201707900A (en) | On the fly automatic wafer centering method and apparatus | |
| JP4395873B2 (en) | Displacement amount detection method and displacement amount correction method for thin plate-like object | |
| JP2017222014A (en) | Teaching device | |
| JP6630884B2 (en) | Substrate alignment device | |
| JP6281554B2 (en) | Teaching jig, robot, teaching system and teaching method | |
| JP7129788B2 (en) | Correction value calculation method for industrial robots | |
| JP2019220588A (en) | Automatic teaching method and control device | |
| JP2017076679A (en) | End effector for tape frame transfer and transfer robot equipped with the same | |
| US10403539B2 (en) | Robot diagnosing method | |
| JP2004106078A (en) | Method for teaching, and processing system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190228 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20190228 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20200227 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20200331 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200529 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20201006 |