JP2017158247A - roller - Google Patents
roller Download PDFInfo
- Publication number
- JP2017158247A JP2017158247A JP2016037704A JP2016037704A JP2017158247A JP 2017158247 A JP2017158247 A JP 2017158247A JP 2016037704 A JP2016037704 A JP 2016037704A JP 2016037704 A JP2016037704 A JP 2016037704A JP 2017158247 A JP2017158247 A JP 2017158247A
- Authority
- JP
- Japan
- Prior art keywords
- roller
- axial direction
- rotation detector
- torsion bar
- housing
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Abstract
Description
本発明は、例えばフィルム搬送装置で用いられるローラに関する。 The present invention relates to a roller used in, for example, a film transport device.
特許文献1及び特許文献2には、固定軸に対して回転自在に支持されたローラを回転駆動するモータが内蔵されたモータ内蔵ローラが記載されている。これら特許文献1及び特許文献2に記載されたモータ内蔵ローラは、ベルトコンベアやローラコンベア等に利用されることを前提としている。
Patent Document 1 and
例えば、フレキシブル基板や曲面ディスプレイに用いられる液晶フィルムあるいは有機ELフィルム等の高機能フィルムの製造に用いられるフィルム搬送装置では、フィルムにスリップによる擦り傷や皺、変形等の欠陥を生じることなく、高速かつ適正張力でフィルムを搬送する必要がある。従来、このようなフィルム搬送装置においては、フィルムにかかる張力を検出するためのローラを別途設け、張力検出用のローラにかかる荷重を検出して張力を算出し、その値をフィードバックして張力制御を行っている。このようなフィルム搬送装置において用いられるローラは、フィルム搬送装置において搬送対象となるフィルムの素材や種類によって、ローラの外周面の構造や必要な摩擦係数が異なっている。また、ローラ外周面の摩耗や構造物の破損等によってメンテナンスが必要となる。 For example, in a film transport apparatus used for manufacturing a high-functional film such as a liquid crystal film or an organic EL film used for a flexible substrate or a curved display, the film does not cause defects such as scratches, wrinkles, and deformation due to slipping at high speed. It is necessary to transport the film with proper tension. Conventionally, in such a film conveying apparatus, a roller for detecting the tension applied to the film is separately provided, the load applied to the tension detecting roller is detected to calculate the tension, and the value is fed back to control the tension. It is carried out. The roller used in such a film transport apparatus differs in the structure and required friction coefficient of the outer peripheral surface of the roller depending on the material and type of the film to be transported in the film transport apparatus. Further, maintenance is required due to wear on the outer peripheral surface of the roller or damage to the structure.
本発明は、上記に鑑みてなされたものであって、多様な帯状搬送物に対応可能であり、且つ、メンテナンス性の高いローラを提供することを目的とする。 The present invention has been made in view of the above, and an object of the present invention is to provide a roller that can cope with various belt-like conveyed objects and has high maintainability.
上述した課題を解決し、目的を達成するために、ローラは、ステータ及び該ステータの径方向外側に対向配置されて相対回転するロータを含むモータ部と、前記ロータと共に回転する円筒状のローラハウジングと、前記ステータが固定される筒状のトーションバーと、前記トーションバーの内壁との間に間隙を介して貫通され、前記トーションバーの軸方向の一方端を固定させる貫通シャフトと、軸方向に前記モータ部を間に挟む位置に配置され、前記ローラハウジングを回転自在に支持する軸受と、前記ローラハウジングの外周面に沿って着脱可能に設けられ、前記ロータと共に回転する円筒状の外筒ローラと、を有する。 In order to solve the above-described problems and achieve the object, the roller includes a stator and a motor portion including a rotor that is disposed opposite to the outer side in the radial direction of the stator and relatively rotates, and a cylindrical roller housing that rotates together with the rotor. And a cylindrical torsion bar to which the stator is fixed, and a through shaft that passes through a gap between the inner wall of the torsion bar and fixes one end in the axial direction of the torsion bar, and in the axial direction A cylindrical outer cylinder roller that is disposed at a position sandwiching the motor portion and that rotatably supports the roller housing, and a cylindrical outer cylinder roller that is detachably provided along the outer peripheral surface of the roller housing and rotates with the rotor And having.
上記構成により、外筒ローラを交換することで多様な帯状搬送物に対応可能となる。また、帯状搬送物との接触面の摩耗や構造物の破損等が生じたとき、外筒ローラを交換することで対応可能となり、メンテナンス性の高いローラを得ることができる。 With the above configuration, it is possible to deal with various belt-shaped transported objects by exchanging the outer cylinder roller. Further, when wear on the contact surface with the belt-like transported object or damage to the structure occurs, it is possible to cope with the problem by replacing the outer cylinder roller, and a highly maintainable roller can be obtained.
また、望ましい態様として、前記外筒ローラは、前記ローラハウジングと回り止め且つ抜け止めされて軸方向にはめ合わせられると共に、軸方向の一方端が前記ローラハウジングに固定されているのが好ましい。 As a desirable mode, it is preferable that the outer cylinder roller is prevented from rotating and coming off with the roller housing and fitted in the axial direction, and one end in the axial direction is fixed to the roller housing.
上記構成により、ローラハウジングと外筒ロータとの間の軸方向のガタツキを抑制することができる。 With the above configuration, it is possible to suppress backlash in the axial direction between the roller housing and the outer cylinder rotor.
また、前記ローラハウジングと前記外筒ローラとのはめ合わせ面の軸方向の少なくとも一部区間が前記トーションバーと前記貫通シャフトとの固定端に向かい小径となるテーパー形状を呈していても良い。 Further, at least a part of the fitting surface of the roller housing and the outer cylindrical roller in the axial direction may have a tapered shape with a small diameter toward the fixed end of the torsion bar and the through shaft.
また、前記ローラハウジングの外周面の軸方向の所定位置に設けられた段差部と前記外筒ローラの内周面の軸方向の所定位置に設けられた段差部とが軸方向にはめ合わされていても良い。 In addition, a step portion provided at a predetermined position in the axial direction on the outer peripheral surface of the roller housing and a step portion provided at a predetermined position in the axial direction on the inner peripheral surface of the outer cylinder roller are fitted in the axial direction. Also good.
また、前記ローラハウジングと前記外筒ローラとのはめ合わせ面の軸方向の一部区間の径が他区間の径と異なっていても良い。 Moreover, the diameter of the one part area of the axial direction of the fitting surface of the said roller housing and the said outer cylinder roller may differ from the diameter of another area.
また、望ましい態様として、前記ローラハウジングの回転を検出する第1の回転検出器と、前記貫通シャフトに対する前記トーションバーの軸方向の他方端の相対的な回転を検出する第2の回転検出器と、を有する構成であるのが好ましい。 Further, as a desirable mode, a first rotation detector that detects rotation of the roller housing, and a second rotation detector that detects relative rotation of the other end in the axial direction of the torsion bar with respect to the through shaft. It is preferable that it is the structure which has these.
上記構成により、第1の回転検出器により検出されるモータ部の位置情報と、第2の回転検出器により検出されるトーションバーの軸方向の他方端の角度変位とを用いて、目標とする張力が得られるようなトルクとなるようにモータ部を出力制御することで、帯状搬送物を適正張力で搬送するための張力制御が可能となる。 With the above configuration, the position information of the motor unit detected by the first rotation detector and the angular displacement of the other end in the axial direction of the torsion bar detected by the second rotation detector are used as targets. By controlling the output of the motor unit so as to obtain a torque at which tension can be obtained, tension control for transporting the belt-shaped transported object with appropriate tension becomes possible.
また、前記第1の回転検出器は、前記モータ部よりも軸方向の一方端側に設けられていても良い。 The first rotation detector may be provided on one end side in the axial direction with respect to the motor unit.
また、前記第1の回転検出器は、前記モータ部と前記第2の回転検出器との間に設けられていても良い。 The first rotation detector may be provided between the motor unit and the second rotation detector.
また、前記第1の回転検出器は、前記第2の回転検出器よりも軸方向の他方端側に設けられていても良い。 The first rotation detector may be provided on the other end side in the axial direction with respect to the second rotation detector.
また、望ましい態様として、前記ローラハウジングの回転を検出する第1の回転検出器と、前記トーションバーの軸方向の他方端に対する前記ローラハウジングの相対的な回転を検出する第2の回転検出器と、を有する構成であるのが好ましい。 Further, as a desirable mode, a first rotation detector that detects rotation of the roller housing, and a second rotation detector that detects relative rotation of the roller housing with respect to the other end in the axial direction of the torsion bar; It is preferable that it is the structure which has these.
上記構成により、第1の回転検出器により検出される位置情報と、第1の回転検出器により検出されるモータ部の位置情報と第2の回転検出器により検出されるモータ部の位置情報との差分とを用いて、目標とする張力が得られるようなトルクとなるようにモータ部を出力制御することで、帯状搬送物を適正張力で搬送するための張力制御が可能となる。 With the above configuration, the position information detected by the first rotation detector, the position information of the motor unit detected by the first rotation detector, and the position information of the motor unit detected by the second rotation detector By using the difference between the two and the output of the motor unit so as to obtain a torque at which a target tension can be obtained, tension control for transporting the belt-shaped transported object with appropriate tension becomes possible.
また、前記第1の回転検出器は、前記モータ部よりも軸方向の一方端側に設けられていても良い。 The first rotation detector may be provided on one end side in the axial direction with respect to the motor unit.
また、前記第1の回転検出器は、前記第2の回転検出器よりも軸方向の他方端側に設けられていても良い。 The first rotation detector may be provided on the other end side in the axial direction with respect to the second rotation detector.
また、望ましい態様として、前記第1の回転検出器及び前記第2の回転検出器の少なくとも一方はレゾルバであるのが好ましい。 As a desirable mode, it is preferable that at least one of the first rotation detector and the second rotation detector is a resolver.
上記構成により、振動に強く、また、高温環境下での用途に適したローラを得ることができる。 With the above configuration, it is possible to obtain a roller that is strong against vibration and suitable for use in a high-temperature environment.
本発明によれば、多様な帯状搬送物に対応可能であり、且つ、メンテナンス性の高いローラを提供することができる。 According to the present invention, it is possible to provide a roller that can cope with various belt-like conveyed objects and has high maintainability.
本発明を実施するための形態(実施形態)につき、図面を参照しつつ詳細に説明する。以下の実施形態に記載した内容により本発明が限定されるものではない。また、以下に記載した構成要素には、当業者が容易に想定できるもの、実質的に同一のものが含まれる。さらに、以下に記載した構成要素は適宜組み合わせることが可能である。 DESCRIPTION OF EMBODIMENTS Embodiments (embodiments) for carrying out the present invention will be described in detail with reference to the drawings. The present invention is not limited by the contents described in the following embodiments. The constituent elements described below include those that can be easily assumed by those skilled in the art and those that are substantially the same. Furthermore, the constituent elements described below can be appropriately combined.
(実施形態1)
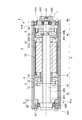
図1は、実施形態1に係るローラの一例を示す断面図である。図1に示す例において、ローラ1は、減速機構を介さずに、発生した動力を対象物にダイレクトに伝達するダイレクトドライブモータである。図1に示すように、ローラ1は、フレキシブル基板や曲面ディスプレイに用いられる液晶フィルムあるいは有機ELフィルム等の高機能フィルムを一例とする帯状搬送物を搬送するための動力を発生するモータ部2と、モータ部2の回転を検出する回転検出器3と、モータ部2及び回転検出器3を保持するハウジング4と、ローラ1で発生するトルクを検出するためのトルク検出器5とを備えている。モータ部2、回転検出器3、及びトルク検出器5は、それぞれ図示せぬ制御装置に電気的に接続されており、ローラ1は、この制御装置によって制御される。
(Embodiment 1)
FIG. 1 is a cross-sectional view illustrating an example of a roller according to the first embodiment. In the example shown in FIG. 1, the roller 1 is a direct drive motor that directly transmits generated power to an object without using a speed reduction mechanism. As shown in FIG. 1, the roller 1 includes a
モータ部2は、ステータ21と、ステータ21に対して回転可能なロータ22とを有する。ロータ22は、回転軸AXを中心に回転する。以下、回転軸AXと平行な方向を「軸方向」ともいう。
The
本実施形態において、モータ部2は、アウターロータ型のモータである。ロータ22は、ステータ21の周囲に配置される。回転軸AXに対して、ロータ22は、ステータ21の外側に配置される。
In the present embodiment, the
ステータ21は、ステータコア21Aと、ステータコア21Aに支持されるコイル21Bとを有する。ステータコア21Aは、回転軸AXの周囲において、等間隔で複数配置されるティースを有する。コイル21Bは、複数設けられる。コイル21Bは、ステータコア21Aの複数のティースのそれぞれに支持される。
The
ロータ22は、回転軸AXの周囲において、等間隔で複数配置された永久磁石を含む。ステータ21のステータコア21Aとロータ22とは、間隙g1を介して対向する。
The
本実施形態において、回転検出器3は、レゾルバステータ31とレゾルバロータ32とを含むレゾルバであり、モータ部2におけるロータ22の回転速度、回転方向、及び回転角度の少なくとも一つを含む位置情報を検出する。
In the present embodiment, the
本実施形態において、トルク検出器5は、レゾルバステータ51とレゾルバロータ52とを含むレゾルバである。このトルク検出器5については後述する。
In the present embodiment, the
ハウジング4は、ロータ22と共に回転する円筒状のローラハウジング41と、トーションバー42と、貫通シャフト43と、円盤部材45とを含む。
The
貫通シャフト43は、トーションバー42を貫通して設けられている。貫通シャフト43の軸方向の一方端は、トーションバー42の軸方向の一方端が固定されている。貫通シャフト43は、トーションバー42との固定部から軸方向の他方端に向けて、トーションバー42と間隙g2を介して対向している。貫通シャフト43の軸方向の他方端は、円盤部材45を貫通しており、ナット43Bで弾性部材である皿ばね43Cを介して円盤部材45に機械的に接続されている。
The through
トーションバー42は、貫通シャフト43に固定された軸方向の一方端に設けられた円盤部42Aと、貫通シャフト43との間に間隙g2を介しつつ、円盤部42Aから軸方向の他方端に延びる円筒部42Bとを含む。トーションバー42の円筒部42Bの外周面には、ステータ21のステータコア21A及び回転検出器3のレゾルバステータ31が設けられている。円筒部42Bの軸方向の他方端には、支持部材44が設けられている。以下、トーションバー42が貫通シャフト43に固定された軸方向の一方端を、「トーションバー42と貫通シャフト43との固定端」ともいう。また、円筒部42Bの軸方向の他方端を、「トーションバー42の開放端」ともいう。なお、図1に示す例において、設備との取り付け面は、トーションバー42と貫通シャフト43との固定端側の面となる。
The
支持部材44は、トーションバー42の開放端に固定される円盤部44Aと、円盤部44Aの外周部から軸方向の他方端側に延びる円筒部44Bとを含む。支持部材44の円筒部44Bの内周面には、トルク検出器5のレゾルバロータ52が設けられており、貫通シャフト43には、レゾルバロータ52と対向する位置にトルク検出器5のレゾルバステータ51が設けられている。
The
ローラハウジング41は、軸方向の一方端が第1軸受6を介してトーションバー42の円盤部42Aの外周部で支持され、軸方向の他方端が第2軸受7を介して円盤部材45の外周部で支持されている。第1軸受6は、内輪がトーションバー42の円盤部42Aに支持され、外輪がローラハウジング41の内周面に支持されている。第2軸受7は、内輪が円盤部材45に支持され、外輪がローラハウジング41の内周面に支持されている。
One end of the
本実施形態では、ローラハウジング41の外周面に沿って、円筒状の外筒ローラ9が設けられている。
In the present embodiment, a cylindrical
図1に示すように、外筒ローラ9は、ローラハウジング41の外周面に沿って設けられる円筒部91と、ローラハウジング41のトーションバー42と貫通シャフト43との固定端側に当接して設けられる円盤部91とを含み、ネジ穴43Dにネジ101が軸方向にねじ込まれることで、回り止め且つ抜け止めされてローラハウジング41と外筒ローラ9の円盤部92とが固定される。ローラハウジング41と外筒ローラ9の円筒部91とのはめ合わせ面の構成については後述する。
As shown in FIG. 1, the
ローラハウジング41の内周面には、モータ部2のステータ21に対向する位置にモータ部2のロータ22が設けられ、回転検出器3のレゾルバステータ31に対向する位置に回転検出器3のレゾルバロータ32が設けられている。
On the inner peripheral surface of the
なお、図1に示す例では、回転検出器3をモータ部2よりもトーションバー42と貫通シャフト43との固定端側に配置した例を示している。
In the example shown in FIG. 1, an example is shown in which the
貫通シャフト43と、トーションバー42の円盤部42Aと、円盤部材45と、皿ばね43Cとは、第1軸受6及び第2軸受7に予圧を加える予圧機構を構成している。
The penetrating
第1軸受6は、外輪の角部がローラハウジング41の段差41Aに当接し、内輪の角部がトーションバー42の円盤部42Aの段差42Dに当接した状態で軸方向に挟持される。第2軸受7は、外輪の角部がローラハウジング41の段差41Bに当接し、内輪の角部が円盤部材45の段差45Cに当接した状態で軸方向に挟持される。この状態で、皿ばね43Cを介してナット43Bを締め込み、皿ばね43Cが自然長よりも短いLに圧縮されることで、第1軸受6及び第2軸受7の双方に予圧を加えることができる。これにより、軸方向及び径方向のズレが抑制され、モータ部2を駆動した際の軸方向及び径方向のガタツキの発生を抑制することができる。
The
図2は、実施形態1に係るローラのロータハウジングと外筒ローラとのはめ合わせ部の構成例を示す図である。 FIG. 2 is a diagram illustrating a configuration example of a fitting portion between the rotor housing of the roller and the outer cylinder roller according to the first embodiment.
上述したように、本実施形態では、ローラハウジング41の外周面に沿って、円筒状の外筒ローラ9が設けられている。この外筒ローラ9は、ローラハウジング41に対して着脱可能に設けられ、ロータ22と共に回転する。本実施形態に係るローラ1は、ローラハウジング41に対して着脱可能な外筒ローラ9を設けることで、帯状搬送物の種類に応じた外筒ローラ9に交換可能となる。また、帯状搬送物との接触面の摩耗や構造物の破損等が生じたとき、外筒ローラ9を交換することで対応可能であり、メンテナンス性の高いローラ1を得ることができる。この外筒ロータ9をローラハウジング41にはめ合わせさせる際、ローラハウジング41と外筒ロータ9との間の軸方向のガタツキを抑制する必要がある。
As described above, in the present embodiment, the cylindrical
ローラハウジング41と外筒ローラ9の円筒部91とのはめ合わせ面は、例えば、図2(a)に示すように、軸方向の全区間がトーションバー42と貫通シャフト43との固定端に向かい小径となるテーパー形状を呈する構成であっても良い。
The fitting surface of the
また、ローラハウジング41と外筒ローラ9の円筒部91とのはめ合わせ面は、例えば、図2(b)に示すように、軸方向の少なくとも一部区間(図2(b)に示す例では、区間B)がトーションバー42と貫通シャフト43との固定端に向かい小径となるテーパー形状を呈する構成であっても良い。
Further, the fitting surface of the
図2(b)に示す例では、トーションバー42と貫通シャフト43との固定端側の区間Aにおけるローラハウジング41と外筒ローラ9の円筒部91とのはめ合わせ面の直径r1は、トーションバー42の開放端側の区間Cにおけるローラハウジング41と外筒ローラ9の円筒部91とのはめ合わせ面の直径r2よりも小さく、区間Aと区間Cとの間の区間Bにおいて、トーションバー42と貫通シャフト43との固定端に向かい小径となるテーパー形状を呈している例を示しているが、トーションバー42と貫通シャフト43との固定端に向かい小径となるテーパー形状を呈する区間は、トーションバー42と貫通シャフト43との固定端側の区間Aであっても良いし、トーションバー42の開放端側の区間Cであっても良い。
In the example shown in FIG. 2B, the diameter r1 of the fitting surface between the
また、ローラハウジング41と外筒ローラ9の円筒部91とのはめ合わせ面は、例えば、図2(c)に示すように、ローラハウジング41の外周面の軸方向の所定位置に設けられた段差部41aと外筒ローラ9の円筒部91の内周面の軸方向の所定位置に設けられた段差部91aとが軸方向にはめ合う構成であっても良い。
The fitting surface between the
図2(c)に示す例では、トーションバー42と貫通シャフト43との固定端側の区間Dにおけるローラハウジング41と外筒ローラ9の円筒部91とのはめ合わせ面の直径r3は、トーションバー42の開放端側の区間Eにおけるローラハウジング41と外筒ローラ9の円筒部91とのはめ合わせ面の直径r4よりも小さくなっている例を示している。すなわち、図2(c)に示すように、ローラハウジング41と外筒ローラ9の円筒部91とのはめ合わせ面の軸方向の一部区間(図2(c)に示す例では、区間D)の直径r3は、他区間(図2(c)に示す例では、区間E)の直径r4とは異なる構成であっても良い。
In the example shown in FIG. 2C, the diameter r3 of the fitting surface of the
また、ローラハウジング41と外筒ローラ9の円筒部91とのはめ合わせ面は、例えば、図2(d)に示すように、ローラハウジング41の外周面の軸方向の所定位置に設けられた段差部41a1と外筒ローラ9の円筒部91の内周面の軸方向の所定位置に設けられた段差部91a1とが軸方向にはめ合うと共に、ローラハウジング41の外周面の軸方向の所定位置に設けられた段差部41a2と外筒ローラ9の円筒部91の内周面の軸方向の所定位置に設けられた段差部91a2とが軸方向にはめ合う構成であっても良い。
The fitting surface between the
図2(d)に示す例では、トーションバー42と貫通シャフト43との固定端側の区間Fにおけるローラハウジング41と外筒ローラ9の円筒部91とのはめ合わせ面の直径r3と、トーションバー42の開放端側の区間Hにおけるローラハウジング41と外筒ローラ9の円筒部91とのはめ合わせ面の直径r3とが等しく、区間Fと区間Hとの間の区間Gにおいて、ローラハウジング41と外筒ローラ9の円筒部91とのはめ合わせ面の直径r4が区間F及び区間Hにおけるローラハウジング41と外筒ローラ9の円筒部91とのはめ合わせ面の直径r3よりも大きくなっている例を示している。すなわち、図2(d)に示す例では、ローラハウジング41と外筒ローラ9の円筒部91とのはめ合わせ面の軸方向の一部区間(図2(d)に示す例では、区間G)の直径r4は、他区間(図2(d)に示す例では、区間F及び区間H)の直径r3よりも大きい。
In the example shown in FIG. 2D, the diameter r3 of the fitting surface of the
また、図2(e)に示す例では、ローラハウジング41の外周面の軸方向の所定位置に設けられた段差部41a3と外筒ローラ9の円筒部91の内周面の軸方向の所定位置に設けられた段差部91a3とが軸方向にはめ合うと共に、ローラハウジング41の外周面の軸方向の所定位置に設けられた段差部41a4と外筒ローラ9の円筒部91の内周面の軸方向の所定位置に設けられた段差部91a4とが軸方向にはめ合う構成であり、トーションバー42と貫通シャフト43との固定端側の区間Fにおけるローラハウジング41と外筒ローラ9の円筒部91とのはめ合わせ面の直径r3と、トーションバー42の開放端側の区間Hにおけるローラハウジング41と外筒ローラ9の円筒部91とのはめ合わせ面の直径r3とが等しく、区間Fと区間Hとの間の区間Gにおいて、ローラハウジング41と外筒ローラ9の円筒部91とのはめ合わせ面の直径r5が区間F及び区間Hにおけるローラハウジング41と外筒ローラ9の円筒部91とのはめ合わせ面の直径r3よりも小さくなっている例を示している。すなわち、図2(e)に示す例では、ローラハウジング41と外筒ローラ9の円筒部91とのはめ合わせ面の軸方向の一部区間(図2(d)に示す例では、区間G)の直径r5は、他区間(図2(d)に示す例では、区間F及び区間H)の直径r3よりも小さい。
Further, in the example shown in FIG. 2 (e), a predetermined position in the axial direction of the stepped portion 41 a 3 provided at a predetermined position in the axial direction of the outer peripheral surface of the
つまり、図2(d)及び図2(e)に示すように、ローラハウジング41と外筒ローラ9の円筒部91とのはめ合わせ面の軸方向の一部区間(図2(d)に示す例では、区間G)の直径r5は、他区間(図2(d)に示す例では、区間F及び区間H)の直径r3とは異なる構成であっても良い。
That is, as shown in FIGS. 2D and 2E, a partial section in the axial direction of the fitting surface between the
上述したように、ローラハウジング41と外筒ローラ9の円筒部91とのはめ合わせ面を、図2に示す各構成例とすることで、ローラハウジング41と外筒ロータ9との間の軸方向のガタツキを抑制することができる。
As described above, by setting the fitting surfaces of the
次に、図1、図3、及び図4を用いて、実施形態1に係るローラ1の動作について説明する。図3は、実施形態1に係るローラにおいて帯状搬送物にかかる張力とトルクとの関係を説明する図である。図4は、実施形態1に係るローラの動作例を示す図である。 Next, the operation of the roller 1 according to the first embodiment will be described with reference to FIGS. 1, 3, and 4. FIG. 3 is a diagram for explaining the relationship between tension and torque applied to the belt-like transported object in the roller according to the first embodiment. FIG. 4 is a diagram illustrating an operation example of the roller according to the first embodiment.
図3に示すように、ローラ1におけるローラハウジング41の半径をrとし、帯状搬送物200にかかる張力をFとすると、回転軸AX周りに働くトルクTは、T=F×rで表される。これを張力Fについて変形すると、以下の(1)式のように表される。つまり、トルクTを検出することにより、張力Fを求めることができる。
As shown in FIG. 3, when the radius of the
F=T/r …(1) F = T / r (1)
ここで、本実施形態において、貫通シャフト43の回転方向に対する剛性は、モータ部2の駆動力により生じるトルクに対して十分に大きく、トーションバー42の回転方向に対する剛性は、貫通シャフト43の回転方向に対する剛性よりも小さいものとする。
Here, in this embodiment, the rigidity with respect to the rotation direction of the through
図4に示すように、モータ部2を駆動してローラハウジング41をA矢示方向に回転させると、ステータ21のステータコア21Aが固定されたトーションバー42の円筒部42BにB矢示方向の反力が作用し、貫通シャフト43に対して相対的な捩れが生じる。
As shown in FIG. 4, when the
本実施形態では、回転検出器3を第1の回転検出器とし、トルク検出器5として、例えば、1度以下の角度変位を検出可能な第2の回転検出器を用いて、モータ部2を駆動したときのトーションバー42の開放端の角度変位(微小角度θ)を検出する。このトーションバー42の開放端の角度変位をトルクTに換算することで、(1)式に示す張力Fを求めることができる。すなわち、回転検出器3(第1の回転検出器)により検出されるモータ部2の位置情報と、トルク検出器5(第2の回転検出器)により検出されるトーションバー42の開放端の角度変位(微小角度θ)とを用いて、目標とする張力が得られるようなトルクとなるようにモータ部2を出力制御することで、帯状搬送物200を適正張力で搬送するための張力制御が可能となる。
In the present embodiment, the
なお、間隙g2は、モータ部2の駆動時におけるトーションバー42の捩れを阻害しない程度に狭いのが好ましく、より具体的には、例えば、0.05mm乃至0.2mm程度であることが望ましい。また、トーションバー42の円筒部42Bと貫通シャフト43との間に間隙g2を設けることで、ステータ21のステータコア21Aとロータ22との間に介在する間隙g1の誤差範囲が大きくなる。ここで、間隙g1と間隙g2との関係がg1≦g2である場合、モータ部2の駆動時においてステータ21のステータコア21Aとロータ22とが接触する可能性がある。このため、間隙g1と間隙g2との関係は、g1>g2であるのが望ましい。
The gap g2 is preferably narrow enough not to inhibit the
また、図1に示す例では、回転検出器3とモータ部2との相互間の磁気干渉を防ぐ遮蔽板8を設けているが、回転検出器3とモータ部2とが相互間の磁気干渉による影響を受けない程度に離れて配置される場合には、遮蔽板8を設けなくても良い。また、磁気遮蔽効果を有する強磁性体の部材で支持部材44を構成することで、トルク検出器5とモータ部2との相互間の磁気干渉を防ぐことが可能であり、図1に示す例では、トルク検出器5とモータ部2との間には遮蔽板を設けていないが、支持部材44を樹脂やアルミニウム等の部材で構成する場合には、トルク検出器5とモータ部2との間に遮蔽板を設けて相互間の磁気干渉を防ぐようにしても良い。
Further, in the example shown in FIG. 1, the shielding
(変形例1)
図5は、実施形態1の変形例1に係るローラの一例を示す断面図である。図5に示すローラ1aでは、回転検出器3をモータ部2とトルク検出部5との間に配置している。
(Modification 1)
FIG. 5 is a cross-sectional view illustrating an example of a roller according to the first modification of the first embodiment. In the
(変形例2)
図6は、実施形態1の変形例2に係るローラの一例を示す断面図である。図6に示すローラ1bでは、回転検出器3をトルク検出器5よりも軸方向の他方端側に設けている。
(Modification 2)
FIG. 6 is a cross-sectional view illustrating an example of a roller according to the second modification of the first embodiment. In the
モータ部2を駆動したときに回転検出器3により検出されるモータ部2の位置情報の変化範囲は、貫通シャフト43に対するトーションバー42の円筒部42Bの相対的な捩れに対して十分に大きい。このため、回転検出器3を設ける軸方向の位置によって回転検出器3の検出精度に与える影響は小さい。
The range of change in the position information of the
図5に示す変形例1では、モータ部2を駆動したときの貫通シャフト43に対する回転検出器3のレゾルバステータ31の回転方向位置における捩れが図1に示す例よりも大きくなるが、上述したように、モータ部2を駆動したときに回転検出器3により検出されるモータ部2の位置情報の変化範囲は、貫通シャフト43に対するトーションバー42の円筒部42Bの相対的な捩れに対して十分に大きいため、回転検出器3のトーションバー42上における位置によって回転検出器3の検出精度に与える影響を無視することができる。
In the first modification shown in FIG. 5, the twist in the rotational direction position of the
また、図6に示す変形例2では、回転検出器3のレゾルバステータ31は、トーションバー42よりも回転方向の剛性が大きい貫通シャフト43に設けられる。このため、モータ部2を駆動したときの回転検出器3の検出精度が貫通シャフト43に対するトーションバー42の円筒部42Bの相対的な捩れによる影響を受けることがない。
In the second modification shown in FIG. 6, the
以上のように、回転検出器3により検出される位置情報は、回転検出器3のレゾルバステータ31をトーションバー42の円筒部42Bに配置したとしても、回転検出器3のレゾルバステータ31を貫通シャフト43に配置した場合と等価と見做すことができる。すなわち、回転検出器3は、貫通シャフト43に対するローラハウジング41の位置情報を検出しているものと見做すことができる。
As described above, the position information detected by the
(変形例3)
図7は、実施形態1の変形例3に係るローラの一例を示す断面図である。図7に示すローラ1cでは、設備との取り付け面は、トーションバー42の開放端側の面となる。
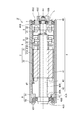
(Modification 3)
FIG. 7 is a cross-sectional view illustrating an example of a roller according to the third modification of the first embodiment. In the
円盤部材45aには、ネジで設備に固定するためのネジ穴45Bが設けられている。
The
図7に示す構成では、設備に調整孔を開口することで、設備側からナット43Bにアクセス可能であり、メンテナンス作業が容易となる。また、モータ部2、回転検出器3、及びトルク検出器5が軸方向の設備側に寄せて配置されることで、ローラ1cの軸方向の重心位置が設備側に近い位置となり、設備との接続部にかかる負荷を小さくすることができる。
In the configuration shown in FIG. 7, by opening the adjustment hole in the facility, the
また、図7に示す構成では、設備との取り付け面(トーションバー42の開放端側の面)とは反対側の面(トーションバー42と貫通シャフト43との固定端側の面)で、ローラハウジング41と外筒ローラ9の円盤部92とが固定される。このため、設備からローラ1cを取り外すことなく、外筒ローラ9の交換作業が可能となる。この構成によって、よりメンテナンス性の高いローラ1cを得ることができる。
Further, in the configuration shown in FIG. 7, a roller (surface on the fixed end side between the
なお、本実施形態では、上述したように、回転検出器3を第1の回転検出器とし、トルク検出器5として、例えば、1度以下の角度変位を検出可能な第2の回転検出器を用いて、モータ部2を駆動したときの貫通シャフト43に対するトーションバー42の開放端の角度変位(微小角度θ)を検出する構成である。すなわち、トルク検出器5(第2の回転検出器)としては、モータ部2の位置情報を検出する回転検出器3(第1の回転検出器)よりも高分解能な回転検出器を用いることが好ましく、より具体的には、モータ部2の最大トルク発生時におけるトーションバー42の捩れ量を1としたとき、1/100よりも小さい分解能を有しているのが望ましい。
In the present embodiment, as described above, the
また、本実施形態において、トルク検出器5は、例えばトーションバー42に設けた歪ゲージであっても良い。この場合、モータ部2を駆動したときの歪ゲージの抵抗値変動量を検出し、この歪ゲージの抵抗値変動量をトルクTに換算することで、(1)式に示す張力Fを求めることができ、上述したように、帯状搬送物200を適正張力で搬送するための張力制御が可能となる。
In the present embodiment, the
以上説明したように、実施形態1に係るローラ1,1a,1b,1cは、ステータ21及び該ステータ21の径方向外側に対向配置されて相対回転するロータ22を含むモータ部2と、ロータ22と共に回転する円筒状のローラハウジング41と、ステータ21が固定される筒状のトーションバー42と、トーションバー42の内壁との間に間隙g1を介して貫通され、トーションバー42の軸方向の一方端を固定させる貫通シャフト43と、軸方向にモータ部2を間に挟む位置に配置され、ローラハウジング41を回転自在に支持する第1軸受6及び第2軸受7と、ローラハウジング41の外周面に沿って着脱可能に設けられ、ロータ22と共に回転する円筒状の外筒ローラ9と、を有している。
As described above, the
上記構成により、外筒ローラ9を交換することで多様な帯状搬送物200に対応可能となる。また、帯状搬送物200との接触面の摩耗や構造物の破損等が生じたとき、外筒ローラ9を交換することで対応可能となり、メンテナンス性の高いローラ1,1a,1b,1cを得ることができる。
With the above configuration, it is possible to deal with various belt-shaped transported
また、外筒ローラ9は、ローラハウジング41と回り止め且つ抜け止めされて軸方向にはめ合わされていると共に、軸方向の一方端がローラハウジング41に固定されている。
Further, the
上記構成により、ローラハウジング41と外筒ロータ9との間の軸方向のガタツキを抑制することができる。
With the above configuration, it is possible to suppress backlash in the axial direction between the
また、実施形態1に係るローラ1,1a,1b,1cは、ローラハウジング41の回転を検出する回転検出器3(第1の回転検出器)と、貫通シャフト43に対するトーションバー42の軸方向の他方端の相対的な回転を検出するトルク検出器5(第2の回転検出器)と、を有している。
The
この構成において、回転検出器3(第1の回転検出器)により検出されるモータ部2の位置情報と、トルク検出器5(第2の回転検出器)により検出されるトーションバー42の軸方向の他方端の角度変位(微小角度θ)とを用いて、目標とする張力が得られるようなトルクとなるようにモータ部2を出力制御することで、帯状搬送物200を適正張力で搬送するための張力制御が可能となる。これにより、張力検出用のローラが不要となり、フィルム搬送経路で使用する総ローラ数を減らすことが可能となる。
In this configuration, the position information of the
(実施形態2)
図8は、実施形態2に係るローラの一例を示す断面図である。なお、上述した実施形態1と同じ構成要素には同一の符号を付して重複する説明は省略する。
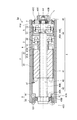
(Embodiment 2)
FIG. 8 is a cross-sectional view illustrating an example of a roller according to the second embodiment. In addition, the same code | symbol is attached | subjected to the same component as Embodiment 1 mentioned above, and the overlapping description is abbreviate | omitted.
本実施形態におけるローラ1dにおいて、ロータハウジング41と外筒ローラ9とのはめ合わせ部の構成については、上述した実施形態1と同様である。
In the
本実施形態におけるローラ1dでは、実施形態1の構成とは異なり、第2の回転検出器5によってトーションバー42の開放端に対するローラハウジング41の相対的な位置情報を検出する構成としている。
Unlike the configuration of the first embodiment, the
図8に示す例では、第2の回転検出器5がトーションバー42の開放端に設けられ、第1の回転検出器3は、第2の回転検出器5に対し、モータ部2を挟んでトーションバー42と貫通シャフト43との固定端側に設けられている。より具体的には、第2の回転検出器5のレゾルバステータ51がトーションバー42の開放端に設けられ、第1の回転検出器3のレゾルバステータ31がモータ2よりもトーションバー42と貫通シャフト43との固定端寄りに設けられている。第1の回転検出器3のレゾルバロータ32は、ロータ41の内周面において第1の回転検出器3のレゾルバステータ31に対向する位置に設けられ、第2の回転検出器5のレゾルバロータ52は、ロータ41の内周面において第2の回転検出器5のレゾルバステータ51に対向する位置に設けられている。
In the example shown in FIG. 8, the
モータ部2を駆動したときにトーションバー42が受ける反力によって生じる貫通シャフト43に対するトーションバー42の回転方向の捩れ量は、トーションバー42と貫通シャフト43との固定端では0となり、軸方向にトーションバー42の開放端に向かうに従い大きくなる。すなわち、第1の回転検出器3が配置されるトーションバー42の軸方向位置における回転方向の捩れ量は、第2の回転検出器5が配置されるトーションバー42の開放端における回転方向の捩れ量よりも小さい。換言すると、第1の回転検出器3により検出される位置情報は、第2の回転検出器5により検出される位置情報よりもトーションバー42の回転方向の捩れによる影響をより受け難い。
The amount of twist in the rotational direction of the
本実施形態では、第1の回転検出器3により検出される位置情報と、第2の回転検出器5により検出される位置情報との差分をとり、この差分をトーションバー42の回転方向の捩れによる角度変位としてトルクTに換算する。これにより、実施形態1の(1)式に示す張力Fを求めることができる。すなわち、第1の回転検出器3により検出される位置情報と、第1の回転検出器3により検出されるモータ部2の位置情報と第2の回転検出器5により検出されるモータ部2の位置情報との差分とを用いて、目標とする張力が得られるようなトルクとなるようにモータ部2を出力制御することで、帯状搬送物200を適正張力で搬送するための張力制御が可能となる。
In this embodiment, the difference between the position information detected by the
なお、実施形態1において、モータ部2を駆動したときに回転検出器3により検出されるモータ部2の位置情報の変化範囲は、貫通シャフト43に対するトーションバー42の円筒部42Bの相対的な捩れに対して十分に大きく、第1の回転検出器3を設ける軸方向の位置によって第1の回転検出器3の検出精度に与える影響は小さいものとして説明したが、本実施形態では、上述したように、第1の回転検出器3により検出される位置情報と、第2の回転検出器5により検出される位置情報との差分をとり、この差分をトーションバー42の回転方向の捩れによる角度変位としてトルクTに換算することを意図した構成である。このため、実施形態2における第1の回転検出器3及び第2の回転検出器5としては、実施形態1におけるトルク検出器5(第2の回転検出器)と同等の高分解能な回転検出器を用いることが好ましく、より具体的には、モータ部2の最大トルク発生時におけるトーションバー42の捩れ量を1としたとき、1/100よりも小さい分解能を有しているのが望ましい。
In the first embodiment, the change range of the position information of the
(変形例1)
図9は、実施形態2の変形例1に係るローラの一例を示す断面図である。図9に示すローラ1eでは、第1の回転検出器3を図8に示す例よりもトーションバー42と貫通シャフト43との固定端に近い位置に配置している。
(Modification 1)
FIG. 9 is a cross-sectional view illustrating an example of a roller according to the first modification of the second embodiment. In the
(変形例2)
図10は、実施形態2の変形例2に係るローラの一例を示す断面図である。図10に示すローラ1fでは、第1の回転検出器3を第2の回転検出器5よりも軸方向の他方端側に設けている。
(Modification 2)
FIG. 10 is a cross-sectional view illustrating an example of a roller according to the second modification of the second embodiment. In the
実施形態1において説明したように、モータ部2を駆動したときに第1の回転検出器3により検出されるモータ部2の位置情報の変化範囲は、貫通シャフト43に対するトーションバー42の円筒部42Bの相対的な捩れに対して十分に大きい。従って、第1の回転検出器3のレゾルバステータ31を貫通シャフト43に配置した場合と等価と見做すことができる。すなわち、第1の回転検出器3は、貫通シャフト43に対するローラハウジング41の位置情報を検出しているものと見做すことができる。
As described in the first embodiment, the change range of the position information of the
一方、本実施形態では、第1の回転検出器3により検出される位置情報と第2の回転検出器5により検出される位置情報との差分が大きいほど、後段の制御精度を向上させることができる。
On the other hand, in this embodiment, the greater the difference between the position information detected by the
図9に示す変形例1では、モータ部2を駆動したときの貫通シャフト43に対する第1の回転検出器3のレゾルバステータ31の回転方向位置における捩れが図1に示す例よりも小さくなる。すなわち、モータ部2を駆動したときの貫通シャフト43に対する第1の回転検出器3のレゾルバステータ31の回転方向位置における捩れによって第1の回転検出器3の検出精度に与える影響を小さくすることができ、第1の回転検出器3により検出される位置情報と第2の回転検出器5により検出される位置情報との差分を図8に示す例よりも大きくすることができる。
In the first modification shown in FIG. 9, the twist in the rotational direction position of the
図10に示す変形例2では、第1の回転検出器3のレゾルバステータ31は、トーションバー42よりも回転方向の剛性が大きい貫通シャフト43に設けられる。このため、モータ部2を駆動したときの第1の回転検出器3の検出精度が貫通シャフト43に対するトーションバー42の円筒部42Bの相対的な捩れによる影響を受けることがなく、第1の回転検出器3により検出される位置情報と第2の回転検出器5により検出される位置情報との差分を図9に示す例よりもさらに大きくすることができる。
In the second modification shown in FIG. 10, the
(変形例3)
図11は、実施形態2の変形例3に係るローラの一例を示す断面図である。図10に示すローラ1gでは、設備との取り付け面は、トーションバー42の開放端側の面となる。
(Modification 3)
FIG. 11 is a cross-sectional view illustrating an example of a roller according to the third modification of the second embodiment. In the
円盤部材45aには、ネジで設備に固定するためのネジ穴45Bが設けられている。
The
図11に示す構成では、設備に調整孔を開口することで、設備側からナット43Bにアクセス可能であり、メンテナンス作業が容易となる。また、モータ部2、回転検出器3、及びトルク検出器5が軸方向の設備側に寄せて配置されることで、ローラ1gの軸方向の重心位置が設備側に近い位置となり、設備との接続部にかかる負荷を小さくすることができる。
In the configuration shown in FIG. 11, by opening the adjustment hole in the facility, the
また、図11に示す構成では、設備との取り付け面(トーションバー42の開放端側の面)とは反対側の面(トーションバー42と貫通シャフト43との固定端側の面)で、ローラハウジング41と外筒ローラ9の円盤部92とが固定される。このため、設備からローラ1gを取り外すことなく、外筒ローラ9の交換作業が可能となる。この構成によって、よりメンテナンス性の高いローラ1gを得ることができる。
Further, in the configuration shown in FIG. 11, a roller (surface on the fixed end side of the
以上説明したように、実施形態2に係るローラ1d,1e,1f,1gは、実施形態1と同様に、ステータ21及び該ステータ21の径方向外側に対向配置されて相対回転するロータ22を含むモータ部2と、ロータ22と共に回転する円筒状のローラハウジング41と、ステータ21が固定される筒状のトーションバー42と、トーションバー42の内壁との間に間隙g1を介して貫通され、トーションバー42の軸方向の一方端を固定させる貫通シャフト43と、軸方向にモータ部2を間に挟む位置に配置され、ローラハウジング41を回転自在に支持する第1軸受6及び第2軸受7と、ローラハウジング41の外周面に沿って着脱可能に設けられ、ロータ22と共に回転する円筒状の外筒ローラ9と、を有している。
As described above, the
上記構成により、外筒ローラ9を交換することで多様な帯状搬送物200に対応可能となる。また、帯状搬送物200との接触面の摩耗や構造物の破損等が生じたとき、外筒ローラ9を交換することで対応可能となり、メンテナンス性の高いローラ1,1a,1b,1cを得ることができる。
With the above configuration, it is possible to deal with various belt-shaped transported
また、外筒ローラ9は、ローラハウジング41と回り止め且つ抜け止めされて軸方向にはめ合わされていると共に、軸方向の一方端がローラハウジング41に固定されている。
Further, the
上記構成により、ローラハウジング41と外筒ロータ9との間の軸方向のガタツキを抑制することができる。
With the above configuration, it is possible to suppress backlash in the axial direction between the
また、実施形態2に係るローラ1d,1e,1f,1gは、ローラハウジング41の回転を検出する第1の回転検出器3と、トーションバー42の軸方向の他方端に対するローラハウジング41の相対的な回転を検出する第2の回転検出器5と、を有している。
In addition, the
この構成において、第1の回転検出器3により検出される位置情報と、第1の回転検出器3により検出されるモータ部2の位置情報と第2の回転検出器5により検出されるモータ部2の位置情報との差分とを用いて、目標とする張力が得られるようなトルクとなるようにモータ部2を出力制御することで、帯状搬送物200を適正張力で搬送するための張力制御が可能となる。これにより、張力検出用のローラが不要となり、フィルム搬送経路で使用する総ローラ数を減らすことが可能となる。
In this configuration, the position information detected by the
なお、上述した実施形態1,2では、回転検出器としてレゾルバを用いる例について説明した。レゾルバのような磁気式センサは、振動に強く、また、高温環境下での用途に適しているが、より高精度な制御を行う必要がある場合には、回転検出器として光学式のエンコーダを用いても良いし、例えばホールIC等の一般的なセンサでも良いことはいうまでもない。 In the first and second embodiments described above, the example in which the resolver is used as the rotation detector has been described. Magnetic sensors such as resolvers are resistant to vibration and suitable for applications in high-temperature environments. However, when more precise control is required, an optical encoder is used as a rotation detector. Needless to say, a general sensor such as a Hall IC may be used.
また、上述した実施形態1,2では、モータ部に永久磁石を用いたPM(Permanent Magnet)型のモータを用いる例について説明したが、VR(Variable Reluctance)型モータを用いた構成であっても良い。PM型モータは、より滑らかな回転が可能であるが、高温環境下での用途としては、VR型モータが適しており、モータ部としてVR型のモータを用いても良いことはいうまでもない。 In the first and second embodiments described above, an example in which a PM (Permanent Magnet) type motor using a permanent magnet is used for the motor unit has been described. However, even in a configuration using a VR (Variable Reluctance) type motor. good. The PM type motor can rotate more smoothly, but it is needless to say that a VR type motor is suitable for use in a high temperature environment, and a VR type motor may be used as the motor unit. .
また、回転検出器としてレゾルバを用いる場合には、レゾルバの歯数をモータ部の歯数と合わせることで、起動時における磁極位置推定動作を省略することができる。 When a resolver is used as the rotation detector, the magnetic pole position estimation operation at the time of starting can be omitted by matching the number of teeth of the resolver with the number of teeth of the motor unit.
上述したように、本実施形態に係るローラ1,1a,1b,1c,1d,1e,1f,1gを用いることで、張力検出用のローラを用いることなく帯状搬送物200の張力制御が可能となるので、この実施形態に係るモータ1,1a,1b,1c,1d,1e,1f,1gは、例えば、フレキシブル基板や曲面ディスプレイに用いられる液晶フィルムあるいは有機ELフィルム等の高機能フィルムの製造に用いられるフィルム搬送装置に用いるのに適している。
As described above, by using the
1,1a,1b,1c,1d,1e,1f,1g ローラ
2 モータ部
3 回転検出器(第1の回転検出器)
4 ハウジング
5 トルク検出器(第2の回転検出器)
6 第1軸受
7 第2軸受
8 遮蔽板
9 外筒ローラ
21 ステータ
21A ステータコア
21B コイル
22 ロータ
41 ローラハウジング
41A 段差
41a,41a1,41a2,41a3,41a4 段差部(ローラハウジング)
42 トーションバー
42A 円盤部
42B 円筒部
42D 段差
43 貫通シャフト
43A はめ合わせ部
43B ナット
43D ネジ穴
44 支持部材
44A 円盤部
44B 円筒部
45,45a 円盤部材
45B ネジ穴
91 円筒部(外筒ローラ)
91a,91a1,91a2,91a3,91a4 段差部(外筒ローラ)
92 円盤部(外筒ローラ)
101 ネジ
200 帯状搬送物
AX 回転軸
g1,g2 間隙
1, 1a, 1b, 1c, 1d, 1e, 1f,
4
6 1st bearing 7
42
91a, 91a1, 91a2, 91a3, 91a4 Stepped portion (outer cylinder roller)
92 Disc (outer cylinder roller)
Claims (13)
前記ロータと共に回転する円筒状のローラハウジングと、
前記ステータが固定される筒状のトーションバーと、
前記トーションバーの内壁との間に間隙を介して貫通され、前記トーションバーの軸方向の一方端を固定させる貫通シャフトと、
軸方向に前記モータ部を間に挟む位置に配置され、前記ローラハウジングを回転自在に支持する軸受と、
前記ローラハウジングの外周面に沿って着脱可能に設けられ、前記ロータと共に回転する円筒状の外筒ローラと、
を有する、ローラ。 A motor unit including a stator and a rotor that is disposed opposite to the outer side in the radial direction of the stator and relatively rotates;
A cylindrical roller housing that rotates with the rotor;
A cylindrical torsion bar to which the stator is fixed;
A penetrating shaft that is penetrated through a gap between the inner wall of the torsion bar and fixes one end in the axial direction of the torsion bar; and
A bearing which is disposed at a position sandwiching the motor portion in the axial direction and rotatably supports the roller housing;
A cylindrical outer cylinder roller which is detachably provided along the outer peripheral surface of the roller housing and rotates together with the rotor;
Having a roller.
前記貫通シャフトに対する前記トーションバーの軸方向の他方端の相対的な回転を検出する第2の回転検出器と、
を有する、
請求項1乃至5の何れか一項に記載のローラ。 A first rotation detector for detecting rotation of the roller housing;
A second rotation detector that detects relative rotation of the other end of the torsion bar in the axial direction with respect to the through shaft;
Having
The roller according to any one of claims 1 to 5.
前記トーションバーの軸方向の他方端に対する前記ローラハウジングの相対的な回転を検出する第2の回転検出器と、
を有する、
請求項1乃至5の何れか一項に記載のローラ。 A first rotation detector for detecting rotation of the roller housing;
A second rotation detector for detecting relative rotation of the roller housing with respect to the other axial end of the torsion bar;
Having
The roller according to any one of claims 1 to 5.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016037704A JP6597398B2 (en) | 2016-02-29 | 2016-02-29 | roller |
| PCT/JP2016/075449 WO2017051675A1 (en) | 2015-09-24 | 2016-08-31 | Roller |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016037704A JP6597398B2 (en) | 2016-02-29 | 2016-02-29 | roller |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017158247A true JP2017158247A (en) | 2017-09-07 |
| JP6597398B2 JP6597398B2 (en) | 2019-10-30 |
Family
ID=59810664
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016037704A Active JP6597398B2 (en) | 2015-09-24 | 2016-02-29 | roller |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6597398B2 (en) |
-
2016
- 2016-02-29 JP JP2016037704A patent/JP6597398B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| JP6597398B2 (en) | 2019-10-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7042211B2 (en) | Multirotation type encoder | |
| US7772836B2 (en) | Device for detecting absolute angle of multiple rotation and angle detection method | |
| US10432072B2 (en) | Dual shaft integrated motor | |
| WO1995034116A1 (en) | Motor device with a reduction gear | |
| KR101194313B1 (en) | Driving modules with hollowness | |
| JP2012149939A (en) | Torque sensor and drive unit with the same | |
| EP3136566B1 (en) | Direct drive motor, conveyancing device, inspection device, and machine tool | |
| JP6567204B2 (en) | Decelerator | |
| JP6507966B2 (en) | roller | |
| JP6597398B2 (en) | roller | |
| JP6582956B2 (en) | roller | |
| JP5678642B2 (en) | Torque sensor and driving device | |
| JP6525008B2 (en) | Direct drive motor, transfer device, inspection device, and machine tool | |
| JP6597413B2 (en) | roller | |
| JP6507964B2 (en) | roller | |
| JP6507965B2 (en) | roller | |
| JP2018201299A (en) | Biaxial-integrated type motor | |
| JP2007057236A (en) | Bearing with multi-rotation absolute angle detecting function | |
| WO2019065717A1 (en) | Magnetic rotation sensor, bearing with magnetic rotation sensor, and method for attaching actuator and magnetic rotation sensor | |
| JP2007108013A (en) | Harmonic drive (r) reducer | |
| WO2022264204A1 (en) | Magnetic rotary encoder | |
| JP2007085890A (en) | Bearing with roller rotation detector for office equipment, and roller driving device | |
| WO2017051675A1 (en) | Roller | |
| JP6507483B2 (en) | Motor, transfer device and semiconductor manufacturing device | |
| KR102288868B1 (en) | Gear motor |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20181115 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190903 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190916 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6597398 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |