JP2017131990A - 干渉回避方法 - Google Patents
干渉回避方法 Download PDFInfo
- Publication number
- JP2017131990A JP2017131990A JP2016012674A JP2016012674A JP2017131990A JP 2017131990 A JP2017131990 A JP 2017131990A JP 2016012674 A JP2016012674 A JP 2016012674A JP 2016012674 A JP2016012674 A JP 2016012674A JP 2017131990 A JP2017131990 A JP 2017131990A
- Authority
- JP
- Japan
- Prior art keywords
- joint
- arm
- interference
- robot arm
- angle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000000034 method Methods 0.000 title claims abstract description 65
- 210000000245 forearm Anatomy 0.000 claims description 52
- 210000000707 wrist Anatomy 0.000 claims description 48
- 238000004364 calculation method Methods 0.000 abstract description 159
- 230000008569 process Effects 0.000 description 27
- 238000010586 diagram Methods 0.000 description 21
- 239000013598 vector Substances 0.000 description 19
- 238000012545 processing Methods 0.000 description 18
- 210000003857 wrist joint Anatomy 0.000 description 12
- 238000006243 chemical reaction Methods 0.000 description 11
- 230000006870 function Effects 0.000 description 10
- 239000011159 matrix material Substances 0.000 description 10
- 210000002414 leg Anatomy 0.000 description 5
- 238000004458 analytical method Methods 0.000 description 3
- 230000008859 change Effects 0.000 description 3
- 230000004044 response Effects 0.000 description 3
- 238000013459 approach Methods 0.000 description 2
- 238000012937 correction Methods 0.000 description 2
- 239000012636 effector Substances 0.000 description 2
- 230000003993 interaction Effects 0.000 description 2
- 238000013507 mapping Methods 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 238000003672 processing method Methods 0.000 description 2
- 230000009466 transformation Effects 0.000 description 2
- 210000000689 upper leg Anatomy 0.000 description 2
- 206010000210 abortion Diseases 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000012447 hatching Effects 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 210000003127 knee Anatomy 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000003252 repetitive effect Effects 0.000 description 1
- 210000003813 thumb Anatomy 0.000 description 1
Images




















Landscapes
- Manipulator (AREA)
Abstract
【課題】ロボットアームの干渉を回避するための計算を高速に行うことが可能な干渉回避方法、制御装置及びプログラムを提供する。
【解決手段】本発明にかかる干渉回避方法は、肘部134を介して上腕部122と前腕リンク部124とが接続されて構成されたロボットアーム120の障害物に対する干渉を回避する。ロボットアーム120の両端の位置が固定された状態における、上腕部122及び前腕リンク部124の可動領域が算出される。可動領域においてロボットアーム120が障害物領域に干渉しない干渉回避範囲が決定される。干渉回避範囲内で設定された肘部134の位置とロボットアーム120の両端の位置とを含む平面上で、手先部126の目標姿勢を満たすように、肘部134の位置E3を示すθが算出される。算出されたθを用いて各関節角度が算出される。
【選択図】図4
【解決手段】本発明にかかる干渉回避方法は、肘部134を介して上腕部122と前腕リンク部124とが接続されて構成されたロボットアーム120の障害物に対する干渉を回避する。ロボットアーム120の両端の位置が固定された状態における、上腕部122及び前腕リンク部124の可動領域が算出される。可動領域においてロボットアーム120が障害物領域に干渉しない干渉回避範囲が決定される。干渉回避範囲内で設定された肘部134の位置とロボットアーム120の両端の位置とを含む平面上で、手先部126の目標姿勢を満たすように、肘部134の位置E3を示すθが算出される。算出されたθを用いて各関節角度が算出される。
【選択図】図4
Description
本発明は干渉回避方法に関し、特に、ロボットアームの干渉を回避する干渉回避方法に関する。
複数の関節を有するロボットアームの動作を制御してロボットアームをリアルタイムに操作する方法として、例えばマスタスレーブ手法がある。マスタスレーブ手法では、マスタ側装置(制御装置)が制御値を指定して、その指定された制御値に応じて、スレーブ側装置(ロボットアーム)が動作する。指定される制御値としてロボットアームの手先位置が指定される場合、逆運動学計算を用いて各関節の関節角度が算出される。
ここで、ロボットの周囲には、ロボットの胴体等の障害物が存在する。したがって、手先位置を指定してロボットアームを制御する場合、各関節の関節角度を算出するだけでなく、ロボットアームが胴体等の障害物と干渉しないような解(干渉回避解)を算出する必要がある。そして、ロボットアームをリアルタイムに操作する場合、上述した関節角度の算出と干渉回避解の算出とを、リアルタイムに行う必要がある。
上記技術に関連して、特許文献1には、ロボットアームの手先部のハンドアイセンサの存在を考慮した周辺との干渉防止を図る、ハンドアイ式ビンピッキングロボットの制御装置が開示されている。特許文献1にかかる制御装置は、干渉パターンテーブルを記憶するテーブル記憶手段と、前記ハンドアイセンサと前記ロボットアームとが干渉するか否かを判定する移動先干渉判定手段と、姿勢再決定手段とを有する。
ここで、干渉パターンテーブルは、ロボットアームの各自由軸における回転角度の、前記ハンドアイセンサと前記ロボットアームとが干渉する組み合わせパターンを定義する。また、移動先干渉判定手段は、エンドエフェクタがワークの位置において決定した姿勢となるように前記ロボットアームを駆動させた場合の、前記各自由軸における回転角度の組み合わせパターンと、前記干渉パターンテーブルにおいて定義された組み合わせパターンとの照合に基づいて、ハンドアイセンサと前記ロボットアームとが干渉するか否かを判定する。姿勢再決定手段は、干渉すると判定された場合に、前記ワークのピッキングに適した前記エンドエフェクタの姿勢を新たに決定する。
特許文献1にかかる技術では、事前に干渉パターンテーブルを準備しておく必要がある。このパターンテーブルを準備するために、膨大な時間を要するおそれがある。したがって、特許文献1にかかる技術を用いても、干渉回避解をリアルタイムに算出することは困難である。
本発明は、このような課題を解決するためになされたものであり、ロボットアームの干渉を回避するための計算を高速に行うことが可能な干渉回避方法を提供することにある。
本発明にかかる干渉回避方法は、肩部と、前記肩部に接続された上腕部と、肘部と、前腕部と、手首部と、手先部とを有するロボットアームであって、前記肘部を介して前記上腕部と前記前腕部とが接続され、前記手首部を介して前記前腕部と前記手先部とが接続され、前記手首部を構成する3つの関節部のうちの前記手先部の側の第1の関節部と前記第1の関節部と隣り合う第2の関節部との間にオフセット部が設けられるように構成されたロボットアームの障害物に対する干渉を回避するロボットアームの干渉回避方法であって、前記手先部の目標位置及び目標姿勢を指定し、前記ロボットアームの両端が固定された状態で、前記第2の関節部が前記第1の関節部と直交する位置にあるとみなし、前記前腕部と前記オフセット部とを一体とみなして構成された前腕リンク部及び前記上腕部の可動領域を算出し、前記可動領域において前記ロボットアームが前記障害物を含む障害物領域に干渉しない干渉回避範囲を決定し、前記決定された干渉回避範囲の中で前記肘部を第1の位置に設定し、前記前腕部と前記オフセット部とを分離して、前記設定された前記肘部の第1の位置と前記ロボットアームの両端とを含む平面上で、前記手先部の目標姿勢を満たすように、前記肘部の位置を示すパラメータを算出し、前記算出されたパラメータを用いて、前記ロボットアームを構成する関節の角度を算出する。
本発明によれば、ロボットアームの干渉を回避するための計算を高速に行うことが可能な干渉回避方法を提供できる。
(実施の形態1)
以下、図面を参照して本発明の実施の形態について説明する。
図1は、実施の形態1にかかるロボットシステム1を示す概略図である。ロボットシステム1は、ロボット100と、ロボットの動作を制御する制御装置2とを有する。ロボット100は、胴体110とロボットアーム120とを有する。胴体110は、胴体前面112と胴体側面114とを有する。
以下、図面を参照して本発明の実施の形態について説明する。
図1は、実施の形態1にかかるロボットシステム1を示す概略図である。ロボットシステム1は、ロボット100と、ロボットの動作を制御する制御装置2とを有する。ロボット100は、胴体110とロボットアーム120とを有する。胴体110は、胴体前面112と胴体側面114とを有する。
なお、実際のロボット100のボディ(実胴体)は、任意の複数の曲面で構成された形状で形成されているが、本実施の形態では、模式的に、胴体110を、実胴体を内包する直方体Bdと考える。また、本実施の形態においては、胴体110を、ロボットアーム120との干渉対象となる障害物としている。したがって、本実施の形態においては、胴体110は、障害物を含む障害物領域(上記「直方体Bd」に対応)であり、胴体前面112及び胴体側面114は、障害物を含む障害物領域の境界面である。
ロボットアーム120は、胴体側面114に接続されている。なお、図1は、ロボット100の右腕に対応するロボットアーム120のみが示されているが、ロボット100は、左腕に対応するロボットアーム120を有してもよい。さらに、ロボット100は、1つ以上(例えば2つ)の脚を有してもよい。以下、ロボット100の右腕に対応するロボットアーム120についての制御方法(干渉回避方法)について説明するが、これに限定されない。本実施の形態にかかる制御方法は、ロボット100の左腕に対応するロボットアーム、及び、ロボット100の脚に対しても適用可能である。つまり、「アーム(ロボットアーム)」とは、腕に相当するアーム、脚に相当するアーム、及びアーム型ロボットのアームを含む。
また、ロボットアーム120は、胴体110に近い方から順に、肩部132と、上腕部122と、肘部134と、前腕部125と、手首部136と、手先部126とから構成されている。胴体110(胴体側面114)には肩部132が接続されている。また、肘部134を介して、上腕部122と前腕部125とが接続されている。また、手首部136を介して前腕部125と手先部126とが接続されている。また、上腕部122の長さをL1とし、前腕部125の長さをL2とする。なお、後述する制御装置2における計算では、上腕部122及び前腕部125は、それぞれ、長さL1及びL2の線分であると仮定されている。
また、肩部132は、互いに直交した3軸(ピッチ、ロール、ヨー)の周りをそれぞれ回転する3個の関節(第一関節部141,第二関節部142,第三関節部143)を有している。また、肘部134は、1軸の周りを回転する1個の関節(第四関節部144)を有している。また、手首部136は、3軸(ヨー、ピッチ、ロール)の周りをそれぞれ回転する3個の関節(第五関節部145,第六関節部146,第七関節部147)を有している。
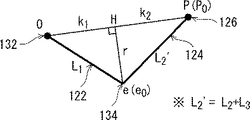
なお、各関節部のヨー、ピッチ、ロールの関係については、これらに限定されるものではない。ここで、隣り合う第六関節部146と第七関節部147との間には、オフセット部127が設けられている。つまり、手首部136においては、関節の一部がオフセットしている。また、第五関節部145及び第六関節部146によって手首関節部135が構成されている。さらに、前腕部125及びオフセット部127によって前腕リンク部124が構成されている。なお、後述する制御装置2における計算では、オフセット部127は、長さL3の線分であると仮定されている。さらに、後述する制御装置2における計算において、前腕部125及びオフセット部127が一体とみなされる場合に、前腕リンク部124は長さL2’の線分であると仮定されている。この場合、L2’=L2+L3である。
また、第一関節部141の関節角度をθ1とし、第二関節部142の関節角度をθ2とし、第三関節部143の関節角度をθ3とする。同様に、第四関節部144の関節角度をθ4とし、第五関節部145の関節角度をθ5とし、第六関節部146(第2の関節部)の関節角度をθ6とし、第七関節部147(第1の関節部)の関節角度をθ7とする。
なお、本実施の形態においては、後述する制御装置2における計算では、肩部132を1点で模擬している。つまり、第一関節部141,第二関節部142,第三関節部143が、1つの点で交差していると仮定している。同様に、後述する制御装置2における計算では、手首関節部135を1点で模擬している。つまり、第五関節部145及び第六関節部146が、1つの点で交差していると仮定している。この場合、肩部132の3個の関節(第一関節部141,第二関節部142,第三関節部143)及び手首関節部135の2個の関節(第五関節部145,第六関節部146)は、それぞれ、仮想的な球面構造を構成しているとみなし得る。一方、第七関節部147は、オフセット部127によって、手首関節部135からオフセットしている。さらに、本実施の形態におけるロボットアーム120は、7個の関節を有していることから、7自由度を有するマニピュレータである。
ここで、肩部132を原点Oとする基準座標系Σ0を定義する。原点Oを通り、前側(胴体前面112側)方向(図1の紙面奥から手前方向)を正とする座標軸をx軸とする。また、原点Oを通り、胴体の右側から左側へと向かう方向(図1の左から右の方向)を正とする座標軸をy軸とする。また、原点Oを通り、上側へ向かう方向(図1の上方向)を正とする座標軸をz軸とする。
制御装置2は、例えばコンピュータとしての機能を有する。制御装置2は、ロボット100の内部に搭載されてもよいし、ロボット100と有線又は無線を介して通信可能に接続されてもよい。制御装置2は、ロボット100の動作、特に、ロボットアーム120の動作を制御する。つまり、ロボットシステム1において、制御装置2はマスタ装置としての機能を有し、ロボット100(ロボットアーム120)はスレーブ装置としての機能を有する。ここで、制御装置2は、ロボットアーム120の胴体110等の障害物に対する干渉を回避するように、ロボットアーム120の各関節角度を決定する。詳しくは後述する。
ここで、本実施の形態において使用される「アームアングル」という指標について説明する。「アームアングル」については、文献「関節の可動範囲を考慮に入れた7自由度冗長マニピュレータの解析的逆運動学解法」(日本ロボット学会誌Vol. 25 No. 4, pp.606〜617, 2007)に記載されている。以下、簡単に説明する。
一般に、空間内におけるマニピュレータの手先の位置及び姿勢は、6つのパラメータで一意に表現され得る。したがって、7自由度マニピュレータでは、余分な自由度が1つ存在する。この冗長自由度により、7自由度マニピュレータでは、手先の位置及び姿勢に影響を及ぼさない機構内部における1自由度のセルフモーションが可能である。ここで、上述したように、本実施の形態にかかるロボットアーム120は、7自由度を有する。したがって、本実施の形態にかかるロボットアーム120は、1つの冗長自由度を有している。本実施の形態では、この冗長自由度を表すパラメータとして、「アームアングル」という指標が用いられる。
図2は、実施の形態1にかかるアームアングルについて説明するための図である。上述したように、肩部132の3個の関節及び手首部136の3個の関節は、それぞれ、仮想的な球面構造を構成している。これにより、手先部126の位置及び姿勢を指定して、ロボットアーム120の両端、つまり肩部132の位置(点O)と手先部126の位置(点P)とを固定しても、冗長自由度により、肘部134の位置(点e)は変化し得る。なお、以下、手先部126の位置は、仮想的に点で示される。ここで、第七関節部147及び手先部126の位置は、互いに同じであると仮定する。また、アームアングルを考慮する場合、前腕部125及びオフセット部127は一体とみなされる。そして、手首部136におけるオフセットが無視され、手首関節部135と第七関節部147とが一体であるとみなされる。
図2に示すように、手先部126の位置(点P)を指定すると、肩部132(点O)と、肘部134(点e)と、手先部126(点P)とを頂点とし、上腕部122と、前腕リンク部124と、線分OPとを3辺とする三角形O−e−Pが定まる。このとき、三角形O−e−Pは、線分OPを中心として、矢印Aに示すように回転可能である。このように、線分OPを中心として肘部134の位置(点e)を回転させた場合の肘部134の位置(点e)の回転角度を、アームアングルφとする。また、予め定められた参照平面上に肘部134の位置がある場合にその位置を点e0とすると、三角形O−e0−Pにおけるアームアングルをφ=0とする。そして、点Pから点Oを見て点eを時計回りに回転させる方向(矢印Aの方向)を、アームアングルの正方向とする。言い換えると、アームアングルの正方向は、点Pから点Oの方向に親指を立てた右手の法則で定義される。アームアングルφを正方向に回転させると、肘部134の位置eは、φ=0である点e0から、e1、e2、e3と移動する。
また、このように、線分OPを中心として肘部134の位置(点e)を回転させた場合に上腕部122及び前腕リンク部124が描く軌跡が、それぞれ、手先部126の位置(点P)が指定された場合の上腕部122及び前腕リンク部124の可動領域である。上腕部122及び前腕リンク部124の可動領域は、肘部134を回転した軌跡で形成された円を底面とし、上腕部122及び前腕リンク部124が回転した軌跡で形成された回転面をそれぞれ側面とする円錐で形成される。
図3は、実施の形態1にかかる制御装置2の構成を示す機能ブロック図である。制御装置2は、主要なハードウェア構成として、CPU(Central Processing Unit)4と、ROM(Read Only Memory)6と、RAM(Random Access Memory)8とを有する。CPU4は、制御処理及び演算処理等を行う演算装置としての機能を有する。ROM6は、CPU4によって実行される制御プログラム及び演算プログラム等を記憶するための機能を有する。RAM8は、処理データ等を一時的に記憶するための機能を有する。
また、制御装置2は、情報格納部12、手先位置決定部14、可動領域算出部16、交点算出部18、干渉回避範囲決定部20、関節角度算出部22、オフセット演算部24及びロボットアーム制御部26(以下、「各構成要素」と称する)を有する。情報格納部12、手先位置決定部14、可動領域算出部16、交点算出部18、干渉回避範囲決定部20、関節角度算出部22、オフセット演算部24及びロボットアーム制御部26は、それぞれ、情報格納手段、手先位置決定手段、可動領域算出手段、交点算出手段、干渉回避範囲決定手段、関節角度算出手段、オフセット演算手段及びロボットアーム制御手段としての機能を有する。各構成要素は、例えば、CPU4がROM6に記憶されたプログラムを実行することによって実現可能である。また、必要なプログラムを任意の不揮発性記録媒体に記録しておき、必要に応じてインストールするようにしてもよい。なお、各構成要素は、上記のようにソフトウェアによって実現されることに限定されず、何らかの回路素子等のハードウェアによって実現されてもよい。各構成要素の機能については、図4を用いて説明する。
図4は、実施の形態1にかかる制御装置2の処理を示すフローチャートである。まず、ステップS102において、制御装置2は、ロボットアーム120の制御に必要な情報を情報格納部12に格納させることによって、事前設定を行う。情報格納部12は、上腕部122の長さL1、前腕部125の長さL2、オフセット部127の長さL3及び前腕リンク部124の長さL2’を格納する。また、情報格納部12は、胴体110(障害物領域)に関する位置情報を格納する。具体的には、情報格納部12は、肩部132を原点Oとするxyz座標系における、胴体110の位置情報(座標データ)を記憶している。さらに具体的には、情報格納部12は、胴体前面112を示す位置情報(座標データ)及び胴体側面114を示す位置情報(座標データ)を格納する。さらに、情報格納部12は、図1に示す線分ABを示す位置情報(座標データ)を格納する。この線分ABは、後述するように、干渉の回避を判定するための干渉判定線分Ld(第1の線)として使用される。
なお、情報格納部12に記憶される胴体110の座標データは、実際のロボットアーム120の太さを考慮した、干渉を検出するために使用される胴体110に対応する障害物の三次元形状を示している。また、胴体110の座標データは、実際の胴体110を内包する障害物領域の境界面の座標を示している。つまり、胴体110に対応する障害物領域の座標データは、ロボットアーム120の太さに対応するマージンが含まれている。
次に、ステップS104において、制御装置2は、手先部126の位置(目標手先位置)及び姿勢(目標手先姿勢)を決定する。具体的には、制御装置2の手先位置決定部14は、操作者がキーボード、マウス又はハプティックデバイス等の入力手段を用いて入力した目標手先位置及び目標手先姿勢のデータを受け付ける。これにより、手先部126の位置及び姿勢が指定される。
次に、ステップS106において、制御装置2は、手先部126の干渉の判定を行う。ここで、S106における干渉の判定は、手先部126が胴体110と干渉するか否かの判定である。具体的には、手先位置決定部14は、指定された目標手先位置から、手先部126が胴体110と干渉するか否かを判定する。例えば、手先位置決定部14は、手先部126及び胴体110をポリゴンで表し、OBB(Oriented Bounding Box:有向境界ボックス)を用いることによって、手先部126が胴体110と干渉するか否かを判定してもよい。
手先部126の干渉が発生する場合(S106のYES)、ステップS140において、制御装置2は、目標手先位置及び目標手先姿勢の修正処理を行う。具体的には、制御装置2は、S102の処理で指定された目標手先位置及び目標手先姿勢をキャンセルする。そして、制御装置2は、操作者が指定した目標手先位置及び目標手先姿勢では干渉が発生するので再度目標手先位置及び目標手先姿勢を指定するように、操作者に対して通知する。
一方、手先部126の干渉が発生しない場合(S106のNO)、ステップS108において、制御装置2は、ロボットアーム120の可動領域を算出する。具体的には、制御装置2の可動領域算出部16は、上述したアームアングルφを用いて、上腕部122及び前腕リンク部124の可動領域を算出する。なお、このときに算出される「可動領域」は、ロボットアーム120の周囲の障害物との干渉については考慮されていない。以下、可動領域算出部16における計算方法を説明する。なお、S108〜S132においては、前腕部125及びオフセット部127は一体とみなされる。そして、手首部136におけるオフセットが無視され、手首関節部135と第七関節部147とが一体であるとみなされる。そして、手首関節部135と第七関節部147とが一体である手首部136の位置及び姿勢は、手先部126の位置及び姿勢とそれぞれ同一であるとみなされる。
図5は、実施の形態1にかかる可動領域の算出方法を説明するための図である。S104において、手先部126の位置PがP0[X,Y,Z]Tに指定されたとする。可動領域算出部16は、図5の(A)に示すように、肩部132の位置(原点O)と手先部126の位置Pとの間の距離(√(X2+Y2+Z2))を保ったまま、手先部126の位置Pをz軸の鉛直下方向の位置(点P’)に置く。このとき、点P’の座標は、[0,0,−√(X2+Y2+Z2)]である。さらに、可動領域算出部16は、肘部134の位置eをxz平面上のx<0の領域の位置(e’)に置く。これにより、肩部132(点O)と、肘部134(点e)と、手先部126(点P)とを頂点とする三角形O−e−P(O−e’−P’)は、xz平面上に存在することとなる。
そして、可動領域算出部16は、図5の(B)に示すように、手先部126の位置PがS104の処理で指定された手先位置P0に一致するように、三角形O−e−Pを、x軸周りに回転角αで回転し、y軸周りに回転角βで回転する。具体的には、可動領域算出部16は、以下の式1及び式2を用いて、点P’及び点e’を、それぞれ点P0及び点e0に変換する。
(式1)

(式2)
ここで、式1及び式2において、P’、e’、P0及びe0は、それぞれ点P’、点e’、点P0及び点e0に関する位置ベクトルである。また、Rαは、回転角αを示す回転行列を示す。また、Rβは、回転角βを示す回転行列を示す。また、ロボットアーム120のリンク長(L1及びL2’)は予め定められているので、e0及びe’を算出でき、上記式1及び式2から、α及びβは一意に算出可能である。
可動領域算出部16は、図5の(B)に示した回転後の三角形O−e0−P0(斜線で示す)を含む平面を、アームアングルの基準となる参照平面とする。つまり、可動領域算出部16は、肘部134の位置eが点e0にある場合に、アームアングルをφ=0とする。
そして、図5の(C)に示すように、可動領域算出部16は、肩部132を原点Oに固定し、手先部126を点P0に固定した状態で、OP周りに上腕部122及び前腕リンク部124を矢印Aの方向に回転させた軌跡を算出する。この軌跡は、手先部126の位置(点P)が点P0に指定された場合の上腕部122及び前腕リンク部124の可動領域である。そして、可動領域は、肘部134を回転した軌跡で形成された円を底面とし、上腕部122及び前腕リンク部124が回転した軌跡で形成された回転面をそれぞれ側面とする円錐で形成される。言い換えると、ロボットアーム120の可動領域は、底面が互いに合わさった2つの円錐で形成される。
図6は、実施の形態1にかかる可動領域算出部16によって算出された円錐の各寸法を定義するための図である。可動領域算出部16は、前腕リンク部124の軌跡で形成された円錐CL(第1の円錐)及び上腕部122の軌跡で形成された円錐CU(第2の円錐)それぞれについての寸法を算出する。ここで、線分OPの長さをL0とする。また、円錐CUの底面は、円錐CLの底面と共通しているので、それぞれの底面である円の半径rは同じである。ここで、円錐CUの高さをk1とし、円錐CLの高さをk2とする。このとき、k1+k2=L0である。また、このとき、肘部134の位置eから線分OPに下ろした垂線の足をHとすると、k1=OHであり、k2=PHである。なお、円錐CUは、三角形O−e−Hを線分OHの周りに回転させた軌跡である。同様に、円錐CLは、三角形P−e−Hを線分PHの周りに回転させた軌跡である。
ここで、上述したように、上腕部122の長さL1及び前腕リンク部124の長さL2’は、予め定められている。また、手先部126の位置が点P0に指定されることによって、線分OPの長さも定められている。したがって、三角形O−e−Pは、アームアングルに寄らないで一意に定められる。したがって、可動領域算出部16は、余弦定理を用いて、r,k1,k2を算出することができる。
さらに、可動領域算出部16は、前腕リンク部124の軌跡である円錐CLについて、頂点(点P)がz’軸上に置かれ、底面がx’y’平面上に置かれるように、座標系(x,y,z)から座標系(x’,y’,z’)への座標変換を行う。具体的には、可動領域算出部16は、以下の式3を用いて、円錐CLについての座標変換を行う。
(式3)
式3において、上記式1及び式2で用いられた回転行列Rα及び回転行列Rβを用いることによって、線分PHがz’軸上となるように、座標系が変換される。これは、図5の(A)に示した座標系を(x,y,z)から(x’,y’,z’)に置き換え、前腕リンク部124をOP周りに回転させた軌跡に相当する。また、頂点(点P)をz’軸の正の側に置くために、座標系は、z軸(z’軸)の符号が正から負に変換される。さらに、底面をx’y’平面(つまりz’=0の平面)上に移動させるために、座標系は、z’軸方向に−k1オフセットされている。これにより、図6に示した点Hが、座標系(x’,y’,z’)の原点O’に一致する。
さらに、可動領域算出部16は、変換後の円錐底面の式を以下の式4と算出し、変換後の円錐面(側面)の式を以下の式5と算出する。
(式4)
(式5)
同様に、可動領域算出部16は、算出された円錐CUについて、頂点(点O)がz’軸上に置かれ、底面がx’y’平面上に置かれるように、座標系(x,y,z)から座標系(x’,y’,z’)への座標変換を行う。具体的には、可動領域算出部16は、以下の式6を用いて、円錐CUについての座標変換を行う。
(式6)
式6において、式3と同様に、上記式1及び式2で用いられた回転行列Rα及び回転行列Rβを用いることによって、線分OPがz’軸上となるように、座標系が変換される。また、底面をx’y’平面(つまりz’=0の平面)上に移動させるために、座標系は、z’軸方向にk1オフセットされている。これにより、図6に示した点Hが、座標系(x’,y’,z’)の原点O’に一致する。
さらに、可動領域算出部16は、変換後の円錐底面の式を上記式4と算出し、変換後の円錐面(側面)の式を以下の式7と算出する。
(式7)
図7A及び図7Bは、実施の形態1にかかる可動領域算出部16によって算出された円錐を示す図である。以上のようにして、可動領域算出部16は、図7Aに示すような円錐CLを算出し、図7Bに示すような円錐CUを算出する。ここで、肘部134の位置eが参照平面にある場合(図5の(B))の位置e0を座標変換すると、変換後のe0’の座標は[−r,0,0]となる。この位置において、アームアングルがφ=0となる。また、アームアングルの正方向は、図7Bに示すように、円錐CUについては、図2の矢印Aより、z’軸の正方向から見て反時計回りとなる。一方、円錐CLについては、座標変換の際にz軸(z’軸)の符号が正から負に変換されたことに伴い、アームアングルの正方向は、図7Aに示すように、円錐CUとは逆の、z’軸の正方向から見て時計回りとなる。
次に、ステップS110において、制御装置2は、可動領域と、干渉判定線分Ldとの交点を算出する。さらに、ステップS112〜S120において、制御装置2は、算出された交点を用いて、ロボットアーム120が可動領域において胴体110に干渉しない範囲(干渉回避範囲)を決定する。以下、本実施の形態における、アームアングルを用いた干渉回避範囲を決定するメカニズムを説明する。
上述したように、手先部126の位置を指定した場合に、ロボットアーム120の可動領域は、アームアングルφを回転させた軌跡である2つの円錐CU及びCLで表される。ここで、胴体110とロボットアーム120との干渉を回避するためには、胴体110の外部にロボットアーム120が存在するようにすればよい。言い換えると、円錐CUの側面上の、肩部132と肘部134とを結ぶ線分(円錐CUの母線)、及び、円錐CLの側面上の、肘部134と手先部126とを結ぶ線分(円錐CLの母線)が、胴体110を模擬した直方体Bdの内部に侵入しないようにすればよい。つまり、円錐CUの母線及び円錐CLの母線が直方体Bdの内部に侵入しないようなアームアングルの範囲を決定すればよい。
図8A,図8B及び図8Cは、実施の形態1にかかるロボット100の胴体110とロボットアーム120との関係について示す図である。図8A,図8B及び図8Cにおいては、手先部126の位置に応じた、可動領域(円錐CU及びCL)と、胴体110(直方体Bd)との位置関係について示されている。手先部126の位置が図8Aに示す位置に指定された場合、可動領域(円錐CU及びCL)の一部が、直方体Bdの内部に侵入している。したがって、この場合には、可動領域(円錐CU及びCL)のうち、直方体Bdの内部に侵入しないアームアングルの範囲(干渉回避範囲)を決定すればよい。
ここで、図8Aに示すようなケースでは、可動領域(円錐CU及びCL)は、胴体側面114及び胴体前面112の両方と交わっている。これにより、可動領域(円錐CU及びCL)は、線分AB(干渉判定線分Ld)と交わっている。したがって、本実施の形態においては、この可動領域(円錐CU及びCL)と線分AB(干渉判定線分Ld)との交点を用いて、干渉回避範囲が決定される。
また、手先部126の位置が図8Bに示す位置に指定された場合、肩部132近傍及び手先部126の近傍を除き、可動領域(円錐CU及びCL)の全てが、直方体Bdの内部に侵入している。この場合は、胴体110とロボットアーム120との干渉を回避できない。したがって、干渉回避範囲は存在しないと決定される。なお、図8Bに示すようなケースでは、可動領域(円錐CU及びCL)は、線分AB(干渉判定線分Ld)と交わらない。
また、手先部126の位置が図8Cに示す位置に指定された場合においても、可動領域(円錐CU及びCL)は、線分AB(干渉判定線分Ld)と交わらない。一方、図8Cのケースでは、可動領域(円錐CU及びCL)の全てが直方体Bdの外側に存在しているか、又は、可動領域(円錐CU及びCL)が胴体側面114のみと交わっている。したがって、この場合では、可動領域(円錐CU及びCL)と胴体側面114との関係から干渉回避範囲が決定される。
ステップS110について説明する。制御装置2の交点算出部18は、図7A及び図7Bに示した円錐と、干渉判定線分Ld(図1の線分AB)との交点を算出する。交点算出部18は、円錐CLと干渉判定線分Ldとの交点を算出し、円錐CUと干渉判定線分Ldとの交点を算出する。言い換えると、交点算出部18は、円錐CLと円錐CUとで別個に交点を算出する。以下、円錐CLと円錐CUとで、分けて説明する。
具体的には、交点算出部18は、円錐CLと干渉判定線分Ldとの交点を算出する際に、上記式3を用いて、点Aの座標及び点Bの座標を座標系(x,y,z)から座標系(x’,y’,z’)に変換する。これによって、交点算出部18は、点Aを変換した点A’の座標及び点Bを変換した点B’の座標を得る。さらに、交点算出部18は、以下の式8のように、干渉判定線分Ld(線分A’B’)上の点PLdを表す式を算出する。
(式8)
ここで、式8において、tは媒介変数である。また、式8において、PLdは点PLdの位置ベクトル[x’,y’,z’]Tである。同様に、式8において、A’及びB’は、それぞれ、A’及びB’の位置ベクトルである。交点算出部18は、式8を式4及び式5に代入し、得られた2次方程式におけるtの解を算出する。式4を満たすtの実数が存在する場合、交点算出部18は、円錐CLの底面と干渉判定線分Ldとの交点が存在すると判定する。また、式5を満たすtの実数が存在する場合、交点算出部18は、円錐CLの側面(円錐面)と干渉判定線分Ldとの交点が存在すると判定する。そして、交点算出部18は、得られたtの値から、交点を算出する。
同様に、交点算出部18は、円錐CUと干渉判定線分Ldとの交点を算出する際に、上記式6を用いて、点Aの座標及び点Bの座標を座標系(x,y,z)から座標系(x’,y’,z’)に変換する。これによって、交点算出部18は、点Aを変換した点A’の座標及び点Bを変換した点B’の座標を得る。さらに、交点算出部18は、円錐CLの場合と同様にして、上記式8のように、干渉判定線分Ld(線分A’B’)上の点PLdを表す式を算出する。そして、交点算出部18は、円錐CLの場合と同様に、式8を式4及び式7に代入し、tの解を算出する。式4を満たすtの実数が存在する場合、交点算出部18は、円錐CUの底面と干渉判定線分Ldとの交点が存在すると判定する。また、式7を満たすtの実数が存在する場合、交点算出部18は、円錐CUの側面(円錐面)と干渉判定線分Ldとの交点が存在すると判定する。そして、交点算出部18は、得られたtの値から、交点を算出する。
ステップS112において、制御装置2の交点算出部18は、可動領域(円錐CU及びCL)と線分A’B’(干渉判定線分Ld)との交点が存在するか否かを判定する。交点が存在しないと判定された場合(S112のNO)、処理はステップS142に進む。一方、交点が存在すると判定された場合(S112のYES)、処理はステップS120に進む。
ステップS142において、制御装置2は、干渉回避範囲があるか否かを判定する。具体的には、制御装置2の干渉回避範囲決定部20は、可動領域(円錐CU及びCL)と胴体110との位置関係が図8Cに示す関係にあるか、又は図8Bに示す関係にあるかを判定する。例えば、干渉回避範囲決定部20は、肩部132と手先部126とを結ぶ線分(OP)が胴体前面112と交わる場合に、図8Bに示す位置関係であると判定してもよい。一方、干渉回避範囲決定部20は、線分OPが胴体前面112と交わらない場合に、図8Cに示す位置関係であると判定してもよい。
干渉回避範囲がないと判定された場合(S142のNO)、つまり図8Bの状態であると判定された場合、処理はS140に進む。一方、干渉回避範囲があると判定された場合(S142のYES)、つまり図8Cの状態であると判定された場合、ステップS144において、干渉回避範囲決定部20は、可動領域(円錐CU及びCL)と胴体側面114との関係から、干渉を回避可能なアームアングルの範囲(干渉回避範囲φs)を決定する。この場合、干渉回避範囲決定部20は、可動領域(円錐CU及びCL)と胴体側面114との交点から、胴体側面114の外側の領域となるアームアングルの範囲を、干渉回避範囲として決定する。なお、可動領域(円錐CU及びCL)と胴体側面114との交点がない場合は、干渉回避範囲決定部20は、アームアングルの全周を、干渉回避範囲φsとして決定する。
ステップS120において、干渉回避範囲決定部20は、可動領域と干渉判定線分Ldとの交点から、干渉回避範囲φsを決定する。具体的には、干渉回避範囲決定部20は、前腕リンク部124におけるアームアングルの存在範囲(ロボットアーム120が胴体110と干渉しないアームアングルφの範囲)を判定する。具体的には、干渉回避範囲決定部20は、円錐CLの底面と干渉判定線分Ld(線分A’B’)との交点が存在するか否か判定する。さらに、干渉回避範囲決定部20は、円錐CLの側面(円錐面)と干渉判定線分Ldとの交点がいくつあるかを判定する。
図9は、図7Aに示した円錐CLの側面と干渉判定線分Ldとの交点が2つ存在する場合を例示する図である。式8を式5に代入して得られたtの2次方程式が2つの実数解を持つ場合に、図9に示すように、円錐CLの側面と干渉判定線分Ld(線分A’B’)との交点が2つ存在する。なお、この場合、底面と干渉判定線分Ldとの交点は存在しない。
干渉回避範囲決定部20は、交点算出部18によって算出された交点a’及びb’の座標を取得する。そして、干渉回避範囲決定部20は、交点a’の座標を用いて、交点a’を円錐CLの底面に投影(正射影)した写像である点a”を算出する。なお、円錐CLは直円錐であり、底面はx’y’平面上にあるため、交点a’の座標が[xa’,ya’,za’]である場合、点a”の座標は[xa’,ya’,0]となる。同様に、干渉回避範囲決定部20は、交点b’の座標を用いて、交点b’を円錐CLの底面に投影(正射影)した写像である点b”を算出する。
さらに、干渉回避範囲決定部20は、円錐CLの底面において、x’軸の負方向(点e0’[−r,0,0]を通る半径)を基準とした、点a”を通る半径Raの角度φ1Lを算出する。また、同様に、干渉回避範囲決定部20は、円錐CLの底面において、x’軸の負方向を基準とした、点b”を通る半径Rbの角度φ2Lを算出する。ここで、図7Aを用いて上述したように、アームアングルφの基準点つまりφ=0の点は、点e0’である。したがって、算出された角度φ1L及びφ2Lが、アームアングルφの限界角度(境界角度)となる。なお、上述したように、円錐CLにおいては、アームアングルの正方向は、z’軸正方向から見て時計回りである。したがって、図9のように点a’及び点b’が位置している場合、−π≦φ≦πとすると、φ1L>0であり、φ2L<0である。
次に、干渉回避範囲決定部20は、算出された角度φ1L及びφ2Lを用いて、前腕リンク部124におけるアームアングルの存在範囲φL(第1の範囲)を判定する。言い換えると、干渉回避範囲決定部20は、ロボットアーム120の前腕リンク部124が胴体110と干渉しないアームアングルφの存在範囲を決定する。ここで、角度φ1L及びφ2Lは、アームアングルの存在範囲φLの境界角度である。したがって、円錐CLにおけるアームアングルの存在範囲φLは、φ2Lから時計回りにφ1Lへと至る範囲(点e0’を含む側)か、又は、φ1Lから時計回りにφ2Lへと至る範囲(点e0’を含まない側)のどちらかである。以下、その判定方法について説明する。
図10は、図9の例におけるアームアングルの存在範囲φLの判定方法について説明するための図である。図10においては、胴体前面112及び胴体側面114が式3を用いてそれぞれ座標変換された平面F’及び平面S’が、円錐CLに重ねられている。ここで、アームアングルの存在範囲φLとは、胴体110と干渉しない範囲であるから、円錐CLが胴体にめり込まない側を、アームアングルの存在範囲φLとすればよい。
例えば、干渉回避範囲決定部20は、線分a’b’上の任意の点(例えば中点g’)を始点とする、胴体前面112上の任意の長さのベクトルVfを算出する。そして、干渉回避範囲決定部20は、ベクトルVfを円錐CLの底面(つまりx’y’平面)に投影(正射影)する。そして、干渉回避範囲決定部20は、ベクトルVfの写像と交わらない側の範囲を、アームアングルの存在範囲φLとして決定する。図9及び図10の例では、アームアングルの存在範囲φLは、φ2Lから時計回りにφ1Lへと至る範囲(φ2L≦φ≦φ1L)となる。また、例えば、干渉回避範囲決定部20は、φ=0を含む側(点e0’を含む側)を、アームアングルの存在範囲φLとしてもよい。
図11は、図7Aに示した円錐CLの底面と干渉判定線分Ldとの交点が1つ存在する場合を例示する図である。式4を満たす式8のtが1つ存在する場合に、図11に示すように、円錐CLの底面と干渉判定線分Ld(線分A’B’)との交点(a’)が1つ存在する。さらに、この場合、円錐CLの側面と干渉判定線分Ldとの交点(b’)は、1つ存在する。つまり、式8を式5に代入して得られたtの2次方程式が1つの実数解を持つ。
図9の場合と同様に、干渉回避範囲決定部20は、交点算出部18によって算出された交点a’及びb’の座標を取得する。図11では、点a’が底面上にあり、点b’が側面上にある。この場合、干渉回避範囲決定部20は、交点b’の座標を用いて、交点b’を円錐CLの底面に投影(正射影)した写像である点b”を算出する。また、干渉回避範囲決定部20は、円錐CLの底面において、x’軸の負方向を基準とした、点b”を通る半径Rbの角度φ2Lを算出する。この角度φ2Lが、アームアングルφの境界角度の1つとなる。以下、もう1つの境界角度φ1Lの算出方法について説明する。
図12は、図11の例におけるアームアングルの存在範囲φLの判定方法について説明するための図である。上述したように、アームアングルφの境界角度の1つは、φ2Lである。ここで、胴体前面112のx’y’z’座標系への座標変換後の平面F’は、点a’を通る。このとき、干渉回避範囲決定部20は、平面F’と円錐CLの底面を形成する円周との交点D’を算出する。さらに、干渉回避範囲決定部20は、円錐CLの底面において、x’軸の負方向を基準とした、交点D’を通る半径Rdの角度を算出する。干渉回避範囲決定部20は、この角度を、境界角度φ1Lと決定する。さらに、干渉回避範囲決定部20は、x’軸の負方向を基準とした、交点a’を通る半径Raの角度φaを含む側の範囲、つまり、φ2Lから時計回りにφ1Lへと至る範囲(φ2L≦φ≦φ1L)を、アームアングルの存在範囲φLと決定する。
図13は、図7Aに示した円錐CLの側面と干渉判定線分Ldとの交点が1つ存在する場合を例示する図である。式8を式5に代入して得られたtの2次方程式が1つの重解を持つ場合に、図13に示すように、円錐CLの側面と干渉判定線分Ld(線分A’B’)との交点が1つ存在する。言い換えると、干渉判定線分Ldは、円錐CLの側面と接する。この干渉判定線分Ldと円錐CL側面との接点が、交点となる。なお、この場合、底面と干渉判定線分Ldとの交点は存在しない。
この場合、干渉回避範囲決定部20は、肩部132と手先部126とを結ぶ線分(OP)が干渉判定線分Ldよりも胴体110の内側を通っているか否かを判定する。この判定は、座標変換後の座標系x’y’z’で行われても、座標変換前の座標系xyzで行われてもよい。線分(OP)が干渉判定線分Ldよりも胴体110の内側を通っている場合、全てのアームアングルφの範囲において胴体110との干渉を回避することはできない。したがって、干渉回避範囲決定部20は、アームアングルの存在範囲φLは存在しないと決定する。なお、この場合、ロボットアーム120が胴体110に接することが許容される条件であれば、干渉回避範囲決定部20は、図9の例と同様にして交点(接点)からアームアングルφを算出し、そのアームアングルφのみをアームアングルの存在範囲φLと決定してもよい。
一方、線分(OP)が干渉判定線分Ldよりも胴体110の外側を通っている場合、全てのアームアングルφの範囲において胴体110と干渉しない。したがって、干渉回避範囲決定部20は、アームアングルの全周を、アームアングルの存在範囲φLと決定する。なお、この場合、ロボットアーム120が胴体110に接することが許容されない条件であれば、干渉回避範囲決定部20は、図9の例と同様にして交点(接点)からアームアングルφを算出し、そのアームアングルφのみを除く範囲を、アームアングルの存在範囲φLと決定してもよい。
次に、干渉回避範囲決定部20は、上腕部122におけるアームアングルの存在範囲φU(第2の範囲)を判定する。具体的には、アームアングルの存在範囲φLについての処理と同様に、干渉回避範囲決定部20は、円錐CUの底面と干渉判定線分Ld(線分A’B’)との交点が存在するか否か判定する。さらに、アームアングルの存在範囲φLについての処理と同様に、干渉回避範囲決定部20は、円錐CUの側面(円錐面)と干渉判定線分Ldとの交点がいくつあるかを判定する。
アームアングルの存在範囲φUについての具体的な処理については、アームアングルの存在範囲φLについての処理と同様であるので、説明を省略する。但し、円錐CUにおいては、アームアングルφの正方向の向きが、円錐CLとは異なる。また、上腕部122は胴体側面114の側に存在するので、アームアングルの存在範囲φLについての処理における「胴体前面112」は、「胴体側面114」に置き換えられる。
具体的には、アームアングルの存在範囲φUについては、図10を用いて説明した「ベクトルVf」は、胴体側面114上の任意の長さの「ベクトルVs」に置き換えられる。つまり、干渉回避範囲決定部20は、線分a’b’上の任意の点(例えば中点g’)を始点とする、胴体側面114上の任意の長さのベクトルVsを算出する。そして、干渉回避範囲決定部20は、そのベクトルVsを用いて、アームアングルの存在範囲φUを決定する。
また、図12では、干渉回避範囲決定部20は、胴体前面112が座標変換された平面F’と円錐CLの底面を形成する円周との交点D’を算出した。一方、アームアングルの存在範囲φUについては、干渉回避範囲決定部20は、胴体側面114が座標変換された平面S’と円錐CUの底面を形成する円周との交点D’を算出して、同様の処理を行う。
なお、アームアングルの存在範囲φLについて、前腕リンク部124に関する円錐CLにおいて図9又は図13のような状態である場合、つまり干渉判定線分Ldが円錐CLの側面とのみ交点を有し、円錐CLの底面と干渉判定線分Ldとの交点が存在しない場合、上腕部122に関する円錐CUでは、干渉判定線分Ldとの交点は存在しない。この場合、アームアングルの存在範囲φUについての処理では、干渉回避範囲決定部20は、アームアングルφの全周を、円錐CUにおけるアームアングルの存在範囲φUと決定する。同様に、アームアングルの存在範囲φUについて干渉判定線分Ldが円錐CUの側面とのみ交点を有し、円錐CUの底面と干渉判定線分Ldとの交点が存在しない場合も、アームアングルの存在範囲φLについての処理では、干渉回避範囲決定部20は、アームアングルφの全周を、円錐CLにおけるアームアングルの存在範囲φLと決定する。
次に、干渉回避範囲決定部20は、判定されたφLとφUとを用いて、アームアングルφの干渉回避範囲φsを決定する。具体的には、干渉回避範囲決定部20は、φLとφUとが重複する範囲を、干渉回避範囲φsと決定する。
なお、上述したように、円錐CLにおいて、干渉判定線分Ldが円錐CLの側面とのみ交点を有し、円錐CLの底面と干渉判定線分Ldとの交点が存在しない場合、円錐CUにおけるアームアングルの存在範囲φUはアームアングルφの全周である。したがって、干渉回避範囲決定部20は、円錐CLにおけるアームアングルの存在範囲φLを、干渉回避範囲φsと決定する。同様に、円錐CUにおいて、干渉判定線分Ldが円錐CUの側面とのみ交点を有し、円錐CUの底面と干渉判定線分Ldとの交点が存在しない場合、円錐CLにおけるアームアングルの存在範囲φLはアームアングルφの全周である。したがって、干渉回避範囲決定部20は、円錐CUにおけるアームアングルの存在範囲φUを、干渉回避範囲φsと決定する。
一方、円錐CLにおいて、干渉判定線分Ldが円錐CLの側面及び底面と交点を有する場合、円錐CUにおいても、干渉判定線分Ldが円錐CUの側面及び底面と交点を有する。このような場合、φLの一部とφUの一部とが互いに重複する。したがって、干渉回避範囲決定部20は、このφLとφUとが重複する範囲を、干渉回避範囲φsと決定する。このような場合においては、アームアングルの干渉回避範囲φsの一方の境界角度で前腕リンク部124が胴体110(胴体110上の干渉判定線分Ld)と干渉し、他方の境界角度で上腕部122が胴体110(胴体110上の干渉判定線分Ld)と干渉している。
次に、ステップS130において、干渉回避範囲決定部20は、目標アームアングルφtを決定する。具体的には、干渉回避範囲決定部20は、干渉回避範囲φsを満たすアームアングルφを、目標アームアングルφtとする。例えば、干渉回避範囲決定部20は、干渉回避範囲φsの中央値を、目標アームアングルφtとしてもよい。
また、S102の処理で事前設定を行うとき、又は、S104の処理で目標手先位置及び目標手先姿勢が決定したときに、干渉回避範囲決定部20は、ロボットアーム120の各関節の許容関節角度から、ロボットアーム120の基準姿勢を規定する最適アームアングルφ0を決定してもよい。そして、干渉回避範囲決定部20は、その最適アームアングルφ0を用いて目標アームアングルφtを決定してもよい。例えば、最適アームアングルφ0は、許容関節角度の中間値を用いて設定されてもよい。ここで、最適アームアングルφ0が干渉回避範囲φsに含まれる場合には、干渉回避範囲決定部20は、最適アームアングルφ0を目標アームアングルφtとして決定してもよい。一方、最適アームアングルφ0が干渉回避範囲φsに含まれない場合には、干渉回避範囲決定部20は、最適アームアングルφ0に近い側の干渉回避範囲φsの境界角度を、目標アームアングルφtとして決定してもよい。
次に、ステップS132において、制御装置2は、目標アームアングルφtにおけるロボットアーム120の各関節の関節角度を算出する。これにより、制御装置2は、肘部134の位置を設定する。具体的には、制御装置2の関節角度算出部22は、決定されたアームアングルφにおける目標アームアングルφtを用いて、逆運動学計算によって、各関節(第一関節部141〜第七関節部147)の関節角度θ1〜θ7を算出する。詳細には、関節角度算出部22は、以下に示す方法によって、各関節角度θ1〜θ7を算出する。
図14は、逆運動学計算を用いた関節角度の算出方法を説明するための図である。なお、手先部126の位置及び姿勢と手首部136の位置及び姿勢とはそれぞれ同一であると仮定していたので、以下、手先位置を手首位置として説明し、手先姿勢を手首姿勢として説明する。S104において、手先位置決定部14が、手首部136の目標位置0x7と、手首部136の目標姿勢0R7とを決定したとする。ここで、「ixk」は、座標系Σiから見た座標系Σkの位置(位置ベクトル)を示す。なお、iが基準となる関節の座標系を示す場合、「ixk」は、i番目の関節から見たk番目の関節の位置を示す。また、「iRk」は、座標系Σiから見た座標系Σkの姿勢を示す。なお、iが基準となる関節の座標系を示す場合、「iRk」は、i番目の関節から見たk番目の関節の姿勢を示す。ここで、i=0の場合は、肩部132の位置つまり原点Oから見た場合を示す。
ここで、図14の(A)に示すように、関節角度算出部22は、肘部134をxz平面上のx≦0の領域に置き、手先部126(手首部136)の位置をz軸上に置くように、ロボットアーム120の位置を仮想的に設定する。このとき、関節角度算出部22は、肘部134の関節である第四関節部144の関節角度θ4を、余弦定理により以下の式9によって算出する(図6参照)。
(式9)
また、関節角度算出部22は、上腕部122とz軸との角度θp、つまり、上腕部122と、肩部132と手首部136を結ぶ線分との角度θpを、余弦定理により以下の式10によって算出する。
(式10)
(式10)
このとき、肘部134の位置に対応する位置ベクトルe0及び手首部136の位置に対応する位置ベクトルw0は、以下の式11で表される。
(式11)
(式11)
関節角度算出部22は、図14の(A)に示した仮想的なロボットアーム120(仮想ロボットアームO−e0−w0)を、図14の(B)に示すように、z軸周りに目標アームアングルφtだけ回転させる。さらに、関節角度算出部22は、図14の(B)に示した仮想ロボットアームO−e1−w0を、図14の(C)に示すように、x軸周りに角度α回転させる。さらに、関節角度算出部22は、図14の(C)に示した仮想ロボットアームO−e2−w2を、図14の(D)に示すように、y軸周りに角度β回転させる。ここで、α及びβは、上記式1及び式2から得られる。このようにして仮想ロボットアームを回転させると、w3は目標手先位置0x7と等しくなる。さらに、e3は、目標アームアングルφtにおける肘部134の位置となる。
ここで、関節角度θ1〜θ7に対応する回転行列をそれぞれR1〜R7とする。また、関節角度算出部22は、各関節角度を0としたときの肩部132から見た肘部134の位置に対応する位置ベクトル3Ise、及び、肘部134から見た手首部136の位置に対応する位置ベクトル4Iewを、以下の式12を用いて算出する。
(式12)
また、手首部136の位置は、手首部136の各関節角度とは関係なく決定されるので、関節角度算出部22は、手首部136の位置に対応する位置ベクトルを、以下の式13によって算出する。
(式13)
(式13)
また、手首部136の姿勢については、肩部132、肘部134及び手首部136で分けて、以下の式14で表される。
(式14)
(式14)
ここで、関節角度算出部22は、上記のα、β、φt及びθpを用いて、式14から以下の式15を算出する。
(式15)
(式15)
また、位置ベクトルe3は、θ1及びθ2のみからなる0R2を用いて算出可能である。したがって、関節角度算出部22は、肘部134の位置ベクトルe3を、以下の式16によって算出する。関節角度算出部22は、式16にα、β、φt及びθpを代入して解くことによって、θ1及びθ2を算出する。
(式16)
また、肩部132の3自由度による姿勢を考慮すると、以下の式17のように、第三関節部143の姿勢(0R3)は、α、β、φt及びθpによる姿勢と一致する。したがって、関節角度算出部22は、式17を用いて、θ3を算出する。
(式17)
(式17)
さらに、手首部136の3自由度による姿勢を考慮すると、以下の式18のように、4R7が定義される。関節角度算出部22は、式18を用いて、θ5〜θ7を算出する。
(式18)
(式18)
S132の処理までは、制御装置2は、手首部136におけるオフセットを無視して、前腕部125及びオフセット部127を一体とみなして演算を行った。つまり、制御装置2は、手首関節部135と第七関節部147とが一体であるとみなして演算を行った。一方、S152の処理からは、制御装置2は、手首部136におけるオフセットを考慮した演算を行う。
図15は、手首部136におけるオフセットを考慮した演算について説明するための図である。図15において、手首部136におけるオフセットが無視された演算、つまりS132の処理によって得られたロボットアーム120の位置及び姿勢が、破線で示されている。S132の処理に関するロボットアーム120は、長さL1の上腕部122と、肘部134と、(前腕部125及びオフセット部127が一体とみなされた)長さL2’の前腕リンク部124と、手先部126とで構成されている。
一方、手首部136におけるオフセットを考慮した演算によって得られたロボットアーム120の位置及び姿勢は、実線で示されている。実線で示されたロボットアーム120においては、前腕部125とオフセット部127とが分離されている。つまり、手首部136におけるオフセットを考慮した演算に関するロボットアーム120は、長さL1の上腕部122と、肘部134と、長さL2の前腕部125と、手首関節部135と、長さL3のオフセット部127と、手先部126とで構成されている。
ここで、Sは、肩部132の位置を示す。また、E2(第1の位置)は、S132の処理によって得られた肘部134の位置(e3)を示す。また、E3は、手首部136におけるオフセットを考慮した演算によって得られた肘部134の位置を示す。また、Wrは、手首部136(手先部126)の位置、つまり目標手先位置(w3)を示す。ここで、オフセットを考慮した演算においては、Wrは、第七関節部147の位置(手先部126の位置)となる。また、Wpは、ピッチ軸周りに回転する第六関節部146の位置、つまり手首関節部135の位置を示す。
手首部136におけるオフセットを考慮した演算では、矢印Bで示すように、S,E2,Wrを含む平面上、つまり肘部134の位置E2とロボットアーム120の両端とを含む平面上で、肘部134の位置をE2からE3に調整する。また、このとき、S104の処理で設定された目標手先姿勢が満たされるようにする。これにより、S130で決定されたアームアングルφtで定められる平面上で、手首部136におけるオフセットを考慮した肘部134の位置を決定することができる。したがって、ロボットアーム120の干渉を回避しやすい位置に肘部134の位置を決定することができる。
ステップS152において、制御装置2は、ロボットアーム120について座標系の変換を行う。具体的には、オフセット演算部24は、図16に示した基準座標系Σ0から、第七関節部147を基準とした座標系Σw,及びΣ7に座標変換を行う。以下、詳述する。
図16は、基準座標系Σ0におけるロボットアーム120を示した図である。上述したように、基準座標系Σ0においては、肩部132の位置Sを原点Oとしている。オフセット演算部24は、まず、この基準座標系Σ0から、図17に示すような、S,E2,Wrをxz平面上に置いた座標系Σwに座標変換を行う。
図17は、座標系Σwにおけるロボットアーム120を示した図である。オフセット演算部24は、座標系Σwにおいて、Wrを原点Oに置き、Sをz軸上に置く。なお、y軸の正方向は、紙面の手前から奥に向かう方向である。このとき、肘部134の位置E3も、xz平面上にある。つまり、オフセット演算部24は、xz平面上で、矢印Cで示すように、肘部134の位置をE2からE3に調整する。一方、手首関節部135(第六関節部146)の位置Wpは、xz平面上にあるとは限らない。
オフセット演算部24は、式19を用いて、手先部126の姿勢を、基準座標系Σ0から座標系Σwに変換する。
(式19)
(式19)
なお、式19を用いて手先部126の位置を変換すると、手先部126の位置は、式20で示すように、原点Oに移動する。
(式20)
(式20)
ここで、L0は、線分SO(線分SWr)の長さである。また、θ0は、線分SO(線分SWr)と線分SE2のなす角である。θは、線分SO(線分SWr)と線分SE3のなす角である。つまり、θは、S,E2,Wrを含む平面上において肘部134の位置E3を示すパラメータである。また、γは、線分OWpと線分OE3のなす角である。また、K(θ)は、線分OE3の長さである。
このとき、オフセット演算部24は、以下の式21を用いて、座標系Σwにおける肘部134の位置ベクトルを算出する。また、オフセット演算部24は、余弦定理により、以下の式22を用いてK(θ)を算出する。さらに、オフセット演算部24は、式10より、以下の式23を用いてθ0を算出する。
(式21)
(式22)
(式23)
ここで、wR7の各成分を以下の式24のように表すと、オフセット演算部24は、wR7の逆行列wR7 −1を、以下の式25のように算出する。
(式24)
(式24)
(式25)
次に、オフセット演算部24は、座標系Σwから、図18に示すような、手先部126の姿勢が単位行列となるような座標系Σ7に、座標変換を行う。つまり、座標系Σ7では、手先部126の目標姿勢は、座標軸と一致したものとなる。
図18は、座標系Σ7におけるロボットアーム120を示した図である。図18には、第六関節部146の回転軸がピッチ軸であり、第七関節部147の回転軸がロール軸である例が示されている。図18に示すように、座標系Σ7において、手先部126の目標姿勢は、座標軸と一致したものとなっている。図18に示すように、座標系Σ7において、第七関節部147の回転軸は、x軸に一致したものとなっている。また、第六関節部146は、yz平面上にある。ここで、オフセット演算部24は、座標系Σ7における肘部134の位置を、E3(x7,y7,z7)とする。また、E3からyz平面に下ろした垂線の足は、H’(0,y7,z7)である。ここで、第六関節部146は、線分OH’上にある。
ここで、式21及び式25から、オフセット演算部24は、座標系Σ7における肘部134の位置E3(x7,y7,z7)を、以下の式26を用いて算出する。
(式26)
(式26)
また、図17において、三角形OWpE3に対する余弦定理によって以下の式27が成り立つ。
(式27)
(式27)
また、図18において、三角形OH’E3は直角三角形であることから、以下の式28が成り立つ。なお、sgn(k)は、kの符号を表す関数である。
(式28)
(式28)
ここで、式27の右辺及び式28の右辺が等しいことから、オフセット演算部24は、以下の式29のf(θ)が0となるθを求めることで、肘部134の位置を算出することができる。
(式29)
(式29)
ここで、式29には、三角関数で表されるK(θ)及びz7が平方根の中に現れるので、式29のみを用いてf(θ)=0を解くことは困難である。したがって、オフセット演算部24は、f(θ)=0を満たすθを算出する際に、収束演算(反復法)を用いる。
ステップS154において、制御装置2は、収束演算の初期値を導出する。具体的には、オフセット演算部24は、θの初期値θ0を、式23を用いて算出する。次に、ステップS156において、制御装置2のオフセット演算部24は、以下に示すように、収束演算処理を行う。以下の説明では、ニュートン法による収束演算処理の方法を示すが、収束演算処理の方法については、ニュートン法に限定されない。
式29を微分すると、以下の式30が得られる。
(式30)
(式30)
オフセット演算部24は、以下の式31で表される漸化式により、θnをn=0から順に式29のf(θn)に代入して、f(θn)を計算する。
(式31)
(式31)
まず、n=0について、オフセット演算部24は、式29に初期値θ0を代入してf(θ0)を算出する。次に、n=1について、オフセット演算部24は、式26、式30及び式31を用いて、θ1を算出する。そして、オフセット演算部24は、算出されたθ1を式29に代入して、f(θ1)を算出する。以下同様にして、オフセット演算部24は、n=2以降についての演算を行う。
ステップS158において、オフセット演算部24は、f(θ)が閾値以下となったか否かを判定する。ここで、f(θ)の閾値とは、f(θ)に関する許容誤差を示す。この閾値は、手先部126の目標位置0x7及び目標姿勢0R7の許容誤差、及びロボットシステム1における制約条件(制御装置2の計算速度、ロボット100の動作速度等)などに応じて、予め定められる。つまり、閾値が小さい(0に近い)ほど、手先部126の位置及び姿勢は目標位置及び目標姿勢に近づくことができるが、f(θ)が閾値以下となるまでの計算時間が膨大となりうる。例えば、f(θ)の閾値は、10−10と定められてもよいが、これに限られない。
f(θ)が閾値以下でない場合(S158のNO)、ステップS160において、オフセット演算部24は、規定回数繰り返したか否かを判定する。具体的には、オフセット演算部24は、nの値が規定値以上となったか否かを判定する。この規定回数(規定値)は、f(θ)が閾値と同様に、ロボットシステム1における制約条件(制御装置2の計算速度、ロボット100の動作速度等)などに応じて、予め定められる。規定回数が大きいほど、手先部126の位置及び姿勢は目標位置及び目標姿勢に近づくことができるが、計算時間が膨大となりうる。例えば、繰り返し計算の規定回数は、8回としてもよいが、これに限られない。
規定回数繰り返した場合(S160のYES)、オフセット演算部24は、この収束演算処理を打ち切る。つまり、オフセット演算部24は、規定回数反復計算を行ってもf(θ)が閾値以内に収束しない場合は、S104で決定された目標位置及び目標姿勢では計算不能であると判定する。そして、処理はS140に進み、目標位置及び目標姿勢の修正処理がなされる。一方、規定回数繰り返していない場合(S160のNO)、nをインクリメントして、上述したS156の収束計算処理を行う。
f(θ)が閾値以下となった場合(S158のYES)、ステップS162において、制御装置2は、第七関節部147の関節角度θ7を算出する。具体的には、オフセット演算部24(または関節角度算出部22)は、このとき算出されたθ(f(θ)が閾値以下となるθ)の値から、上記式26及び以下の式32を用いて、関節角度θ7を算出する。
(式32)
次に、ステップS164において、制御装置2は、第六関節部146の位置及び姿勢を算出する。具体的には、オフセット演算部24(または関節角度算出部22)は、以下の式33を用いて、基準座標系Σ0における第六関節部146の位置0x6及び姿勢0R6を算出する。ここで、iTkは、i番目の関節から見たk番目の関節の位置及び姿勢を示す行列である。なお、目標位置0x7及び目標姿勢0R7は、上述したように、S104の処理で予め決定されている。
(式33)
次に、ステップS172において、制御装置2は、各関節部の位置及び姿勢を算出する。具体的には、関節角度算出部22は、算出された第六関節部146の位置0x6及び姿勢0R6を用いて、ロボットアーム120の各関節の関節角度を算出する。ここで、第七関節部147の関節角度θ7は既知であるから、残りの関節自由度は6自由度となる。つまり、目標位置3自由度及び目標姿勢3自由度の計6自由度と等しくなり、冗長自由度がなくなる。したがって、他の関節角度は、一意に決定され得る。
第六関節部146の位置0x6及び姿勢0R6を用いた6自由度の関係式は、以下の式34で表される。
(式34)
(式34)
関節角度算出部22は、肘部134の関節である第四関節部144の関節角度θ4を、余弦定理により以下の式35によって算出する。
(式35)
(式35)
ここで、第六関節部146の位置及び姿勢を基準として肩部132の位置及び姿勢6T0は、式36で表される。
(式36)
(式36)
式36より、6T0における6x0の成分は、3T0によらないで、θ4、θ5及びθ6のみで表されることがわかる。ここで、6x0は、既知である0T6の逆行列によって求められる。また、式35によってθ4は既知である。したがって、関節角度算出部22は、以下の式37によって、θ5及びθ6を算出する。
(式37)
また、関節角度算出部22は、式37より、算出されたθ4、θ5及びθ6を用いて、6R3を算出する。ここで、0R6は既知であるので、関節角度算出部22は、以下の式38を用いて、θ1、θ2及びθ3を算出する。
(式38)
ステップS174において、制御装置2は、ロボットアーム120を動作させる。具体的には、制御装置2のロボットアーム制御部26は、S172で算出された各関節角度となるように、ロボットアーム120の各関節を制御する。なお、その際、ロボットアーム制御部26は、ロボットアーム120の各関節の許容される動作域、及び速度域のチェックを行ってもよい。そして、動作域又は速度域を満たさない場合、制御装置2は、目標アームアングルφt及びを再度決定し直してもよい。
本実施の形態においては、ロボットアーム120の可動領域を円錐で模擬し、その円錐(円錐CL及びCU)と、胴体110の表面上にある干渉判定線分Ldとの交点に応じて、干渉回避範囲を決定している。ここで、円錐と線分との交点は、単純な幾何学的手法によって容易に算出可能である。したがって、本実施の形態においては、ロボットアーム120の干渉回避範囲を、高速に決定することが可能である。
ロボットアームの干渉を回避する他の方法として、例えば、一連の腕軌道に関して事前にポテンシャル場を設定し、そのポテンシャル場を用いて干渉を回避可能な経路を探索する方法がある。しかしながら、このような数値解析方法では、膨大な反復計算を行う必要があり、最終的に経路が探索されるように解が収束するまでの時間が膨大となるおそれがある。また、干渉を回避可能な各関節角度を示すテーブルを記憶しておいて、そのテーブルを随時参照する方法もある。しかしながら、この方法では、テーブルを事前に設定する必要があり、干渉を回避可能な解を都度算出するものではない。
一方、本実施の形態においては、上述したように、単純な幾何学的手法によって、ロボットアーム120の干渉回避範囲を決定することが可能である。したがって、本実施の形態においては、ロボットアームの干渉を回避するための計算を高速に行うことが可能となる。言い換えると、ロボットアームの干渉回避解をリアルタイムに決定することが可能となる。さらに、本実施の形態においては、高速に(リアルタイムに)干渉回避解を決定することができるので、ロボットの制御周期ごとに、干渉回避解を決定することが可能となる。さらに、高速に干渉回避解を決定できることから、ロボットの制御周期を短くすることが可能となり、それによって、力制御の応答性能を向上させることも可能となる。つまり、本実施の形態においては、ロボットアーム120と胴体110との干渉回避を考慮して各関節角度を高速に求解できることで、力制御を高周期で行うことを可能とし、したがって、高応答な力インタラクション可能なロボットを実現することが可能となる。
また、本実施の形態においては、最適アームアングルφ0を事前に決定しておき、その最適アームアングルφ0を用いて目標アームアングルφtを決定してもよい。これによって、ロボットアームの干渉を回避しつつ、ロボットアームの基準姿勢に近くなるように、ロボットアームを制御することが可能となる。これによって、ロボットアームの干渉を回避しつつ、ロボットアームの動作がより自然となるように制御することが可能となる。
また、手首部136の各関節を設計するに際し、3軸が互いに直交した構造とすると、関節構造が非常に複雑となる。一方、本実施の形態にように、第六関節部146(ピッチ)と第七関節部147(ロール)との間にオフセット部127を設けることで、手首部136の設計が容易となる。このように、手首部136にオフセット部127が設けられている場合であっても、本実施の形態においては、ロボットアーム120の干渉を回避することが可能となる。
また、従来、手首部にオフセットを有する7軸マニピュレータの逆運動学計算を行うためには、いずれかの1軸の関節角度を恣意的に指定しなければならなかった。一方、本実施の形態においては、制御装置2は、ロボットアーム120の可動領域において干渉を回避するように決定されたアームアングルによって設定された肘部134の位置と、肩部132の位置と、手先部126の位置とを含む平面上で、オフセットを考慮して肘部134の位置を再設定する。これにより、可動領域において干渉を回避し、かつオフセットを考慮した指標で、手先部126の1自由度の角度(第七関節部147の関節角度)を算出することができ、この角度を用いて残りの6自由度の角度も、解析的手法で算出することができる。
なお、本実施の形態においては、オフセット演算部24が収束演算処理を行っている。一方、オフセット部127の長さL3は、動きの親和性の観点から、上腕部122の長さL1及び前腕部125の長さL2と比較して非常に短い。したがって、f(θ)の収束解(f(θ)を閾値以下とするθ)は、θの初期値θ0と非常に近くなる。また、f(θ)の収束演算において使用されるのは、sinθ及びcosθのみであり、演算コストは非常に小さい。したがって、本実施の形態における収束演算処理は、収束時間も早く、計算に要する負荷も軽いものである。したがって、本実施の形態における収束演算処理は、解析的解法のみで求解する手法と比較しても遜色ない収束時間も及び計算負荷となる。したがって、手首部136にオフセット部127が設けられている場合であっても、高速に干渉回避解を決定できることから、ロボットの制御周期を短くすることが可能となる。したがって、本実施の形態においては、手首部136にオフセット部127が設けられている場合であっても、高応答な力インタラクション可能なロボットを実現することが可能となる。
なお、本実施の形態においては、図15等に示すように、ロボットアーム120の干渉を回避するように決定されたアームアングルによる肘部134の位置E2を、オフセットを考慮してE3に移動する。したがって、ロボットアーム120が、S132で計算された干渉回避位置から、干渉位置に移動してしまうことが懸念される。しかしながら、上述したように、オフセット部127の長さL3つまりオフセット量は、極力短く設計される。したがって、仮に、肘部134の位置をE2からE3に移動することによりロボットアーム120が干渉領域に入り込む場合であっても、その入り込む量はわずかである。したがって、制御装置2は、胴体110に対応する障害物領域(直方体Bd)を、その入り込みを考慮して大きめに設定しておいてもよい。つまり、障害物領域(直方体Bd)及び干渉判定線分Ldは、オフセット量及び胴体110の外形を考慮して設定され得る。
(変形例)
なお、本発明は上記実施の形態に限られたものではなく、趣旨を逸脱しない範囲で適宜変更することが可能である。例えば、図4及び図18に示したフローチャートにおいて、複数の処理の順序は、適宜、変更可能である。例えば、図4において、S102〜S106の処理、及びS140〜S144の処理は、省略されてもよい。また、アームアングルの存在範囲φLについての処理及びアームアングルの存在範囲φUについての処理の順序は、逆であってもよい。
なお、本発明は上記実施の形態に限られたものではなく、趣旨を逸脱しない範囲で適宜変更することが可能である。例えば、図4及び図18に示したフローチャートにおいて、複数の処理の順序は、適宜、変更可能である。例えば、図4において、S102〜S106の処理、及びS140〜S144の処理は、省略されてもよい。また、アームアングルの存在範囲φLについての処理及びアームアングルの存在範囲φUについての処理の順序は、逆であってもよい。
また、上述した実施の形態においては、障害物の例としてロボット100の胴体110としたが、障害物は、ロボット100の胴体でなくてもよい。例えば、障害物は、柱又は壁等の、ロボットアーム120が干渉し得る任意の物体であってもよい。この場合、制御装置2は、各障害物の位置を示すデータを取得する手段を有してもよい。例えば、ロボット100に、障害物の位置データ(座標データ)を取得するためのセンサを設けてもよい。また、障害物は1つとは限らず、複数あってもよい。この場合、複数の障害物それぞれについて、上述した処理を行ってもよい。このとき、複数の障害物それぞれについて干渉回避範囲が決定されるが、この決定された複数の干渉回避範囲が互いに重複する範囲を、ロボットアームが複数の障害物に対して干渉しない干渉回避範囲と決定してもよい。
また、第一関節部141,第二関節部142,第三関節部143の順序、及び、第五関節部145,第六関節部146,第七関節部147の順序は、図1に示したものに限られず、適宜変更可能である。なお、各関節の順序を変更した場合には、関節角度算出部22における計算方法を適宜変更すればよい。
また、上述した実施の形態においては、干渉判定線分Ldは胴体110の角部110a又は角部110bにあるとしたが、このような構成に限られない。干渉判定線分Ldは、胴体110(障害物)の表面上(境界面上)の任意の線分であってもよい。しかしながら、干渉判定線分Ldを角部110a又は角部110bにある線分とすることで、干渉回避範囲の判定がより容易となる。
また、上述した実施の形態においては、ロボットアーム120と障害物(胴体等)との干渉について説明したが、ロボットアーム120はロボットの腕に限られない。例えば、本実施形態にかかるロボットアームは、ロボットの脚に対しても適用可能である。この場合、上腕部は上腿部、前腕部は下腿(脛)部、肘は膝に、それぞれ置き換え可能である。また、本実施形態にかかるロボットアームは、任意のマニピュレータに対しても適用可能である。
また、上述した実施の形態においては、ロボットアーム120(及びロボット100)は、物理的な実体のあるロボット100に設けられているとしているが、このような構成に限られない。例えば、ロボットアーム120(及びロボット100)は、仮想的なものであってもよい。つまり、本実施の形態は、例えばバーチャルリアリティに対しても適用可能である。具体的には、本実施の形態は、例えばゲームにおいて、任意の仮想的なリンク状の物体と任意の仮想的な障害物との干渉を回避するための計算に対しても適用可能である。また、本実施の形態は、何らかのリンク状の物体と障害物との干渉の有無をシミュレーションするものに対しても適用可能である。
また、上述した実施の形態においては、基準座標系Σ0を図1に示すように定義したが、基準座標系Σ0をロボットアーム120に対してどのように定義するかは、適宜変更可能である。他の座標系についても同様である。また、上述した実施の形態においては、xyz座標系(基準座標系Σ0)の原点を肩部132に設定したが、原点位置は任意である。この場合、肩部132と原点とのオフセットを考慮して、計算を行うようにすればよい。
また、S154の処理で、θの初期値θ0が式23を用いて算出されるとしたが、このような構成に限られない。θの初期値は、前回にロボットアーム120を動作させたときの逆運動学計算の過程で算出されたθとしてもよい。
また、上述した実施の形態においては、第六関節部146の回転軸がピッチ軸であり、第七関節部147の回転軸がロール軸であるとしたが、このような構成に限られない。第六関節部146の回転軸がロール軸であり、第七関節部147の回転軸がピッチ軸としてもよい。この場合、座標系Σ7において、第七関節部147の回転軸は、y軸に一致したものとなる。また、この場合、第六関節部146は、xy平面上にある。
1 ロボットシステム
2 制御装置
12 情報格納部
14 手先位置決定部
16 可動領域算出部
18 交点算出部
20 干渉回避範囲決定部
22 関節角度算出部
24 オフセット演算部
26 ロボットアーム制御部
30 線分決定部
100 ロボット
110 胴体
110a 角部
110b 角部
112 胴体前面
114 胴体側面
120 ロボットアーム
122 上腕部
124 前腕リンク部
125 前腕部
126 手先部
127 オフセット部
132 肩部
134 肘部
135 手首関節部
136 手首部
141 第一関節部
142 第二関節部
143 第三関節部
144 第四関節部
145 第五関節部
146 第六関節部
147 第七関節部
2 制御装置
12 情報格納部
14 手先位置決定部
16 可動領域算出部
18 交点算出部
20 干渉回避範囲決定部
22 関節角度算出部
24 オフセット演算部
26 ロボットアーム制御部
30 線分決定部
100 ロボット
110 胴体
110a 角部
110b 角部
112 胴体前面
114 胴体側面
120 ロボットアーム
122 上腕部
124 前腕リンク部
125 前腕部
126 手先部
127 オフセット部
132 肩部
134 肘部
135 手首関節部
136 手首部
141 第一関節部
142 第二関節部
143 第三関節部
144 第四関節部
145 第五関節部
146 第六関節部
147 第七関節部
Claims (1)
- 肩部と、前記肩部に接続された上腕部と、肘部と、前腕部と、手首部と、手先部とを有するロボットアームであって、前記肘部を介して前記上腕部と前記前腕部とが接続され、前記手首部を介して前記前腕部と前記手先部とが接続され、前記手首部を構成する3つの関節部のうちの前記手先部の側の第1の関節部と前記第1の関節部と隣り合う第2の関節部との間にオフセット部が設けられるように構成されたロボットアームの障害物に対する干渉を回避するロボットアームの干渉回避方法であって、
前記手先部の目標位置及び目標姿勢を指定し、
前記ロボットアームの両端が固定された状態で、前記第2の関節部が前記第1の関節部と直交する位置にあるとみなし、前記前腕部と前記オフセット部とを一体とみなして構成された前腕リンク部及び前記上腕部の可動領域を算出し、
前記可動領域において前記ロボットアームが前記障害物を含む障害物領域に干渉しない干渉回避範囲を決定し、
前記決定された干渉回避範囲の中で前記肘部を第1の位置に設定し、
前記前腕部と前記オフセット部とを分離して、前記設定された前記肘部の第1の位置と前記ロボットアームの両端とを含む平面上で、前記手先部の目標姿勢を満たすように、前記肘部の位置を示すパラメータを算出し、
前記算出されたパラメータを用いて、前記ロボットアームを構成する関節の角度を算出する
干渉回避方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016012674A JP6515828B2 (ja) | 2016-01-26 | 2016-01-26 | 干渉回避方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016012674A JP6515828B2 (ja) | 2016-01-26 | 2016-01-26 | 干渉回避方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017131990A true JP2017131990A (ja) | 2017-08-03 |
| JP6515828B2 JP6515828B2 (ja) | 2019-05-22 |
Family
ID=59504074
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016012674A Expired - Fee Related JP6515828B2 (ja) | 2016-01-26 | 2016-01-26 | 干渉回避方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6515828B2 (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020161910A1 (ja) | 2019-02-08 | 2020-08-13 | 日本電気株式会社 | 制御装置、制御方法、記録媒体 |
| WO2021030610A1 (en) * | 2019-08-15 | 2021-02-18 | X Development Llc | Inverse kinematic solver for wrist offset robots |
| EP4052870A4 (en) * | 2019-10-31 | 2023-11-22 | Minebea Mitsumi Inc. | IMAGE PROCESSING DEVICE AND IMAGE PROCESSING METHOD |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009226552A (ja) * | 2008-03-24 | 2009-10-08 | Nissan Motor Co Ltd | 冗長ロボットの教示方法 |
| US20110172819A1 (en) * | 2010-01-14 | 2011-07-14 | Samsung Electronics Co., Ltd. | Manipulator and control method thereof |
| JP2014018912A (ja) * | 2012-07-18 | 2014-02-03 | Seiko Epson Corp | ロボット制御装置、ロボット制御方法およびロボット制御プログラムならびにロボットシステム |
| JP2014050952A (ja) * | 2012-09-10 | 2014-03-20 | Fanuc Robotics America Inc | 冗長ロボットを制御する方法 |
-
2016
- 2016-01-26 JP JP2016012674A patent/JP6515828B2/ja not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009226552A (ja) * | 2008-03-24 | 2009-10-08 | Nissan Motor Co Ltd | 冗長ロボットの教示方法 |
| US20110172819A1 (en) * | 2010-01-14 | 2011-07-14 | Samsung Electronics Co., Ltd. | Manipulator and control method thereof |
| JP2014018912A (ja) * | 2012-07-18 | 2014-02-03 | Seiko Epson Corp | ロボット制御装置、ロボット制御方法およびロボット制御プログラムならびにロボットシステム |
| JP2014050952A (ja) * | 2012-09-10 | 2014-03-20 | Fanuc Robotics America Inc | 冗長ロボットを制御する方法 |
Non-Patent Citations (1)
| Title |
|---|
| 清水 昌幸,他4名: ""関節の可動範囲を考慮に入れた7自由度冗長マニピュレータの解析的逆運動学解法"", 日本ロボット学会誌, vol. 第25巻,第4号,p.606-617, JPN6019009509, May 2007 (2007-05-01), JP, ISSN: 0004000313 * |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020161910A1 (ja) | 2019-02-08 | 2020-08-13 | 日本電気株式会社 | 制御装置、制御方法、記録媒体 |
| WO2021030610A1 (en) * | 2019-08-15 | 2021-02-18 | X Development Llc | Inverse kinematic solver for wrist offset robots |
| US11235459B2 (en) | 2019-08-15 | 2022-02-01 | Intrinsic Innovation Llc | Inverse kinematic solver for wrist offset robots |
| CN114555301A (zh) * | 2019-08-15 | 2022-05-27 | 因思创新有限责任公司 | 用于腕部偏置机器人的逆运动学求解器 |
| KR20220099535A (ko) * | 2019-08-15 | 2022-07-13 | 인트린식 이노베이션 엘엘씨 | 손목 오프셋 로봇들을 위한 역운동학 솔버 |
| JP2022544650A (ja) * | 2019-08-15 | 2022-10-20 | イントリンジック イノベーション エルエルシー | 手首オフセットロボットのための逆運動学ソルバ |
| KR102693929B1 (ko) | 2019-08-15 | 2024-08-08 | 인트린식 이노베이션 엘엘씨 | 손목 오프셋 로봇들을 위한 역운동학 솔버 |
| EP4052870A4 (en) * | 2019-10-31 | 2023-11-22 | Minebea Mitsumi Inc. | IMAGE PROCESSING DEVICE AND IMAGE PROCESSING METHOD |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6515828B2 (ja) | 2019-05-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6137155B2 (ja) | 干渉回避方法、制御装置及びプログラム | |
| US20200338730A1 (en) | Trajectory planning device, trajectory planning method and program | |
| US20090306825A1 (en) | Manipulation system and method | |
| CN108241339A (zh) | 仿人机械臂的运动求解和构型控制方法 | |
| JP2018020410A (ja) | レイアウト設定方法、およびレイアウト設定装置 | |
| Xu et al. | Dual arm-angle parameterisation and its applications for analytical inverse kinematics of redundant manipulators | |
| US20220193894A1 (en) | Supervised Autonomous Grasping | |
| CN109202864B (zh) | 评价信息输出装置、评价信息输出方法以及存储介质 | |
| CN114378809B (zh) | 软体机器人操纵器的无奇点运动学参数化 | |
| Xu et al. | Vision-based simultaneous measurement of manipulator configuration and target pose for an intelligent cable-driven robot | |
| JP6515828B2 (ja) | 干渉回避方法 | |
| JP2014014920A (ja) | 機構制御装置、プログラム及び機構制御方法 | |
| Cong et al. | A review and performance comparison of visual servoing controls | |
| Dube et al. | A model of the humanoid body for self collision detection based on elliptical capsules | |
| Jiang et al. | An integrated inverse kinematic approach for the 7-DOF humanoid arm with offset wrist | |
| Gienger et al. | Exploiting task intervals for whole body robot control | |
| JP6848761B2 (ja) | 物体間距離評価方法及び相対的に移動する物体間の干渉評価方法 | |
| JP2011245614A5 (ja) | ||
| CN115781666A (zh) | 一种用于机器人全身模仿系统的控制方法 | |
| Bai et al. | Coordinated motion planning of the mobile redundant manipulator for processing large complex components | |
| Kansal et al. | Kinematic and dynamic analysis of a dexterous multi-fingered delta robot for object catching | |
| CN108858162B (zh) | 四轴机械臂的位置确定方法和装置 | |
| JP2019093487A (ja) | ロボットの制御装置及びロボットの逆変換処理方法 | |
| Wang et al. | Human–robot kinematic mapping method based on index constraint | |
| Scarcia et al. | Local online planning of coordinated manipulation motion |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180214 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190319 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190401 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6515828 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| LAPS | Cancellation because of no payment of annual fees |