JP2017018465A - 鉗子システム - Google Patents
鉗子システム Download PDFInfo
- Publication number
- JP2017018465A JP2017018465A JP2015140409A JP2015140409A JP2017018465A JP 2017018465 A JP2017018465 A JP 2017018465A JP 2015140409 A JP2015140409 A JP 2015140409A JP 2015140409 A JP2015140409 A JP 2015140409A JP 2017018465 A JP2017018465 A JP 2017018465A
- Authority
- JP
- Japan
- Prior art keywords
- forceps
- bending
- unit
- tip
- angle
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B17/2909—Handles
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/71—Manipulators operated by drive cable mechanisms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00017—Electrical control of surgical instruments
- A61B2017/00022—Sensing or detecting at the treatment site
- A61B2017/00075—Motion
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
- A61B2017/00292—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery mounted on or guided by flexible, e.g. catheter-like, means
- A61B2017/003—Steerable
- A61B2017/00318—Steering mechanisms
- A61B2017/00323—Cables or rods
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
- A61B2017/00292—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery mounted on or guided by flexible, e.g. catheter-like, means
- A61B2017/003—Steerable
- A61B2017/00318—Steering mechanisms
- A61B2017/00323—Cables or rods
- A61B2017/00327—Cables or rods with actuating members moving in opposite directions
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/0042—Surgical instruments, devices or methods, e.g. tourniquets with special provisions for gripping
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00535—Surgical instruments, devices or methods, e.g. tourniquets pneumatically or hydraulically operated
- A61B2017/00544—Surgical instruments, devices or methods, e.g. tourniquets pneumatically or hydraulically operated pneumatically
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2901—Details of shaft
- A61B2017/2902—Details of shaft characterized by features of the actuating rod
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2901—Details of shaft
- A61B2017/2905—Details of shaft flexible
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2926—Details of heads or jaws
- A61B2017/2927—Details of heads or jaws the angular position of the head being adjustable with respect to the shaft
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/28—Surgical forceps
- A61B17/29—Forceps for use in minimally invasive surgery
- A61B2017/2926—Details of heads or jaws
- A61B2017/2927—Details of heads or jaws the angular position of the head being adjustable with respect to the shaft
- A61B2017/2929—Details of heads or jaws the angular position of the head being adjustable with respect to the shaft with a head rotatable about the longitudinal axis of the shaft
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/74—Manipulators with manual electric input means
- A61B2034/742—Joysticks
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/064—Measuring instruments not otherwise provided for for measuring force, pressure or mechanical tension
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/06—Measuring instruments not otherwise provided for
- A61B2090/067—Measuring instruments not otherwise provided for for measuring angles
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/70—Manipulators specially adapted for use in surgery
- A61B34/74—Manipulators with manual electric input means
Landscapes
- Health & Medical Sciences (AREA)
- Surgery (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Medical Informatics (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Molecular Biology (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Ophthalmology & Optometry (AREA)
- Robotics (AREA)
- Manipulator (AREA)
- Surgical Instruments (AREA)
Abstract
【解決手段】鉗子先端部21は、屈曲方向と屈曲角度との2自由度での屈曲を可能とする。駆動部22は、鉗子先端部21への駆動力を発生する。駆動伝達部23は、その駆動力を鉗子先端部21に伝達する棒状のものである。操作部25は、操作者の操作により屈曲方向と屈曲角度を指示する。センサ部24は、駆動伝達部23の軸を中心とする回転方向の角度αを検出する。制御部12は、所定の目標屈曲方向及び目標屈曲角度に従って鉗子先端部21が屈曲するように、駆動部22を制御する。制御部12は、操作部25により指示された屈曲角度を目標屈曲角度として設定し、操作部25により指示された屈曲方向と、センサ部24により検出された角度αとに基づいて、目標屈曲方向を設定する。
【選択図】図2
Description
屈曲方向と屈曲角度との2自由度での屈曲を可能とする鉗子先端部と、
前記鉗子先端部への駆動力を発生する駆動部と、
前記駆動力を前記鉗子先端部に伝達する棒状の駆動伝達部と、
前記駆動伝達部からみて前記駆動部側に配置され、操作者の操作により前記屈曲方向と前記屈曲角度を指示する操作部と、
前記駆動伝達部の軸を中心とする回転方向の角度を検出する第1検出部と、
を含む鉗子マニピュレータと、
所定の目標屈曲方向及び目標屈曲角度に従って前記鉗子先端部が屈曲するように、前記駆動部を制御する制御部と、
を備え、
前記制御部は、
前記操作部により指示された前記屈曲角度を目標屈曲角度として設定し、
前記操作部により指示された前記屈曲方向と、前記第1検出部により検出された前記角度とに基づいて、目標屈曲方向を設定する、
鉗子システムである。
前記駆動力の実績値を検出する第2検出部をさらに備え、
前記制御部は、
前記鉗子先端部の前記屈曲方向及び前記屈曲角度と、前記鉗子先端部への駆動力との対応関係を予め保持しており、
前記対応関係に基づいて、前記目標屈曲方向及び前記目標屈曲角度から、前記駆動力の目標値を求め、
前記駆動力の目標値と、前記第2検出部により検出された前記駆動力の実績値とに基づいて、前記駆動部を制御する
ことができる。
ことができる。
ことができる。
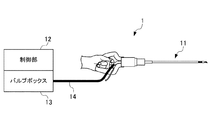
本実施形態の鉗子システム1は、鉗子マニピュレータ11と、制御部12と、バルブボックス13と、空気圧配管14とを備える。
鉗子マニピュレータ11は、空気圧シリンダ(図4等の空気圧シリンダ群41a,41b)を内蔵し、当該空気圧シリンダの駆動により、その先端部(図2の鉗子先端部21)の姿勢を変化(2自由度の屈曲)させる。
空気圧シリンダは、制御部12による制御に基づいて、バルブボックス13内のサーボバルブから空気圧配管14を介して供給される空気を用いて、駆動する。
鉗子マニピュレータ11は、2自由度での屈曲を可能とする鉗子先端部21と、当該鉗子先端部21への駆動力を発生する駆動部22と、その駆動力を鉗子先端部21に伝達する棒状の駆動伝達部23と、駆動伝達部23の軸を中心とする回転方向の角度を検出するセンサ部24と、操作者の操作により鉗子先端部21の屈曲動作を指示する操作部25と、操作者が鉗子マニピュレータ11を手で保持する保持部26と、を備える。
図3は、鉗子先端部21の姿勢を説明するための図である。
図3に示す様に、鉗子先端部21の所定の断面(例えば駆動伝達部23と接続する端の断面)の中心点を原点とし、当該断面を含む2次元平面において直交するx軸とy軸を定義し、当該断面の法線方向にz軸を定義することにより、3次元の直交座標系が構築される。
ここで、x軸とy軸で定義される2次元平面上の任意の直線と、z軸とを含む所定の平面を以下、「屈曲方向面」と呼ぶ。
また以下、鉗子先端部21の鉗子側の断面の法線を「P」と記述し、法線Pとz軸とのなす角度θを「屈曲角度θ」と呼ぶ。つまり、屈曲角度θとは、鉗子先端部21がどれだけ屈曲しているかを表す指標である。
x軸とy軸で定義される2次元平面上において、x軸を開始点として、屈曲方向面が回転した角度δ、即ちx軸と屈曲方向面とのなす角度δを以下、「屈曲方向δ」と呼ぶ。つまり、屈曲方向δとは、鉗子先端部21がどちらの方向に曲がっているのかを表す指標である。
鉗子先端部21は、このような屈曲方向δと屈曲角度θとの2自由度で、屈曲をすることができる。
ここで、ワイヤ31a1,31a2の組を、以下、「ワイヤ群31a」と呼ぶ。ワイヤ31b1,31b2の組を、以下、「ワイヤ群31b」と呼ぶ。
ここで、空気圧シリンダ群41aは、2つの空気圧シリンダにより構成されている。つまり、ワイヤ群31aを構成するワイヤ31a1,31a2の夫々に対して、空気圧シリンダ群41aを構成する2つの空気圧シリンダの夫々が締結される。
ここで、空気圧シリンダ群41bは、2つの空気圧シリンダにより構成されている。つまり、ワイヤ群31bを構成するワイヤ31b1,31b2の夫々に対して、空気圧シリンダ群41bを構成する2つの空気圧シリンダの夫々が締結される。
図4(A)は、駆動前のデフォルトの状態の鉗子先端部21を示している。
図4(B)は、図4(A)のデフォルトの状態から右方に屈曲した状態の鉗子先端部21を示している。
即ち、右側のワイヤ群31aが空気圧シリンダ群41aによって引かれると共に、左側のワイヤ群31bが空気圧シリンダ群41bによって押し出されることで、鉗子先端部21の姿勢が図4(A)の状態から図4(B)の状態に移行する。
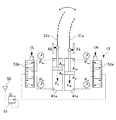
空気圧システムにおいて、コンプレッサ等の空気圧供給源50に対して、圧力調整弁51を介して複数の5ポート型のサーボバルブが接続されている。各サーボバルブは、上述の空気圧シリンダに対応して夫々設けられている。図5の例では、図4の例にあわせて、空気圧シリンダ群41aに対応するサーボバルブ群53aと、空気圧シリンダ群41bに対応するサーボバルブ群53bとが描画されている。
鉗子先端部21(図4等)の屈曲目標(後述の図7及び図8の屈曲目標qref)に応じて可変する入力電圧ua,ubの夫々が各サーボバルブ群53a,53bの夫々に印加されることで、供給圧力Pa,Pbの夫々の操作が制御される。これにより、空気圧シリンダ群41a,41bの夫々が駆動される。即ち、鉗子先端部21(図4等)の屈曲に必要な空気圧シリンダ群41a,41bの駆動力が発生する。
図6は、このような本実施形態の鉗子システム1の鉗子先端部21と、従来の鉗子との動作の差異点を模試的に説明する図である。
具体的には、図6(A)は、従来の鉗子の鉗子先端部21の動作を模試的に説明する図である。
図6(B)は、本実施形態の鉗子システム1の鉗子先端部21の動作を模式的に説明する図である。
作業者が鉗子を用いて針を通す作業等を考慮すると、図6(B)に示す様に、鉗子先端部21を軸とした回転運動をすると好適である。このため、鉗子先端部21が回転する鉗子自体は従来から存在した。
しかしながら、このような従来の鉗子では、操作者は、鉗子に設けられた操作部(図2の操作部25や保持部26に相当)から手を一度離して、別途設けられたダイヤルを回す等の別の操作をすることが要求された。このような操作は操作者にとって直感的な操作とは言い難く、直感的な操作が要望されていた。
また、従来の鉗子では、鉗子先端部21の屈曲方向を変えながら先端を軸として回転する等の連続的な動作は困難である。
しかしながら、操作者は、保持部26を保持したまま手首を回転させてしまうと、仮に鉗子先端部21の姿勢の制御がなされないとすると、鉗子先端部21の屈曲方向δは、操作者の操作部25による指示に追従せずに、手首の回転角度αに対応する分だけ変化してしまう。つまり、図6(B)に示すような鉗子先端部21を軸とした回転が実現不可能になる(図6(A)のままになる)。
そこで、本実施形態の鉗子システム1は、鉗子先端部21の屈曲方向δについて、手首の回転角度α分の回転を打ち消すように、当該鉗子先端部21の根元に配置したワイヤ群31a,31b及び空気圧シリンダ群41a,41bを用いた拮抗駆動を制御する。
ここで、この制御を行うためには、操作者の手首の回転角度αの検出が必要になる。そこで、本実施形態では、当該回転角度αを検出すべく、加速度センサもしくはジャイロセンサあるいはこの両方からなるセンサ部24が鉗子マニピュレータ11に設けられている。
このような制御を行うことにより、鉗子先端部21の屈曲方向δ及び屈曲角度θの変化は、操作者の操作部25による指示に追従するようになり、操作者からみて図6(B)に示す様な鉗子先端部21を軸とした回転運動が実現される。その結果、操作者にとってより直感的な操作が実現されるので、手術時間の短縮等が期待できるようになる。
しかしながら、本実施形態の鉗子システム1は、空気圧駆動のシステムであるため、バルブボックス13内に圧力センサが搭載されている。
そこで、本実施形態では、鉗子先端部21の屈曲角度θ及び屈曲方向δと供給圧力の関係が実験的に事前取得され、その事前取得の結果に基づいて屈曲角度θ及び屈曲方向δと供給圧力との関係式が構築され、当該関係式が制御部12に保持されている。制御部12は、この関係式を用いた制御を実行することで、位置センサを鉗子マニピュレータ11に設けることなく、鉗子先端部21の姿勢制御(屈曲動作の制御)を実現している。
図7は、本実施形態の鉗子システム1における鉗子先端部21の姿勢制御のうち、操作部及びセンサ部のブロック線図を示している。
図8は、本実施形態の鉗子システム1における鉗子先端部21の姿勢制御のうち、駆動部のブロック線図を示している。
なお、操作部25として、本実施形態ではジョイスティックが採用されているが、特にこれに限定されず、駆動伝達部23からみて駆動部22側に配置され、操作者の操作により屈曲方向δと屈曲角度θを指示するものであれば足りる。
そして、制御部12は、操作者により指示された屈曲方向δ_Joystickに対して、操作者の腕の回転角度δ_roll(上述した図2の回転角度αに相当)を加えることで、鉗子先端部21の目標屈曲方向δ_refを求める。即ち、制御部12は、操作者により指示された屈曲方向δ_Joystick自体を単に目標屈曲方向δ_refとするのではなく、操作者により指示された屈曲方向δ_Joystickに対して操作者の腕の回転角度δ_rollを加えたものを目標屈曲方向δ_refとすることで、制御を実現している。
即ち、制御部12は、ブロック102において、センサ部24のうち加速度センサの検出信号のtan―1(y、z)をしたものを、観測値として出力する。
制御部12は、ブロック103において、センサ部24のうち加速度センサの検出信号を積分したものを、事前推定値として出力する。
そして、制御部12は、ブロック104において、観測値と事前推定値を入力してカルマンフィルタを用いることで、操作者の腕の回転角度δ_rollを算出する。
ここで、上述したように本実施形態では位置センサを鉗子マニピュレータ11に設けていないので、鉗子先端部21の屈曲の値qとシリンダ駆動力Fの関係式F(q)が予め用意されている。
そこで、制御部12は、ブロック111において、鉗子先端部21の目標値q_refを入力値として関係式F(q)を演算し、その出力値を、各空気圧シリンダ(図4の空気圧シリンダ群41a,41bを構成する各空気圧シリンダ)の目標駆動力F_refとして出力する。
制御部12は、制御ブロック112において、この入力値を用いたPI制御を実行することでバルブボックス13内のサーボバルブの入力電圧uを決定する。また、制御部12は、ブロック113において、目標駆動力F_refの急激な変化に対する応答性を高めるため、微分値のフィードフォワード補償をしている。
即ち、フィードフォアード補償がなされた入力電圧uが、各サーボバルブ(図5の例でいえば、空気圧シリンダ群41aに対応するサーボバルブ群53aと、空気圧シリンダ群41bに対応するサーボバルブ群53b)に夫々印加される。即ち、図8においてブロック114は、各サーボバルブを示している。
ブロック119は、ブロック118から出力されたシリンダ変位によって姿勢(屈曲方向δと屈曲角度θ)が変化する鉗子先端部21を示している。即ち、ブロック119は、シリンダ変位を入力し、鉗子先端部21の姿勢の実績値qを出力する。
即ち、本発明が適用される鉗子システム(例えば図1の鉗子システム1)は、
屈曲方向と屈曲角度との2自由度での屈曲を可能とする鉗子先端部(例えば図2の鉗子先端部21)と、
前記鉗子先端部への駆動力を発生する駆動部(例えば図2の駆動部22)と、
前記駆動力を前記鉗子先端部に伝達する棒状の駆動伝達部(例えば図2の駆動伝達部23)と、
前記駆動伝達部からみて前記駆動部側に配置され、操作者の操作により前記屈曲方向と前記屈曲角度を指示する操作部(例えば図2の操作部25)と、
前記駆動伝達部の軸を中心とする回転方向の角度を検出する第1検出部(例えば図2のセンサ部24)と、
を含む鉗子マニピュレータ(例えば図1や図2の鉗子マニピュレータ11)と、
所定の目標屈曲方向及び目標屈曲角度に従って前記鉗子先端部が屈曲するように、前記駆動部を制御する制御部(例えば図1の制御部12)と、
を備え、
前記制御部は、
前記操作部により指示された前記屈曲角度を目標屈曲角度として設定し、
前記操作部により指示された前記屈曲方向と、前記第1検出部により検出された前記角度とに基づいて、目標屈曲方向を設定する、
鉗子システムである。
即ち、鉗子システムは、鉗子先端部21の屈曲方向について、操作者の手首の回転角度に相当する角度(第1検出部により検出された前記角度)の回転を打ち消すように、当該鉗子先端部の姿勢を制御することができる。
このようにして、操作者の手首が回転しても(駆動伝達部の軸を中心等する回転があっても)、鉗子先端部の屈曲方向及び屈曲角度の変化は、操作者の操作部による指示に追従するようになり、操作者からみて鉗子先端部を軸とした回転運動が実現される(図6(B)参照)。その結果、操作者にとってより直感的な操作が実現されるので、手術時間の短縮等が期待できるようになる。
図9に示す動作実験とは、上述の図1の鉗子システム1を採用し、鉗子マニピュレータ11の駆動伝達部23の軸を中心とする等速回転をさせた場合に、鉗子先端部21の屈曲方向δが回転角度αに応答して変化しているか(制御がなされているのか)を確認する実験である。
この動作実験では、回転速度を0.89[rad/s]とし、鉗子先端部21の初期値として、目標屈曲角度θrefとして0.7[rad]を設定すると共に、目標屈曲方向δrefとして0.0[rad]に設定した。
図9において、2点鎖線が回転角度αを示し、点線が目標屈曲方向δrefを示し、一点鎖線が屈曲方向実測値δを示している。回転角度αと、それを検知して目標屈曲方向δrefの変化に応答した屈曲方向実測値δを足した値δ+αが、実線により示されている。
この実線で示す値δ+αをみると、屈曲方向δの初期値である0.0[rad]付近の値を保ち続けている。
このことからセンサ部24(図2)で検知された回転角度αによる制御が実現化されていることが確認でき、鉗子先端部21を軸とする回転(図6(B)参照)が実現されていることがわかる。
図10に示す評価実験とは、十分にトレーニングをおこなった操作者が、従来の鉗子と、上述の本発明が適用される図1の鉗子システム1との夫々を用いて、バイオシートの決められた位置へ針を通すタスクを8回おこない、その平均時間を夫々計測する実験である。
図10において、「Convention」が従来の鉗子を示し、「Proposal」が上述の本発明が適用される図1の鉗子システム1を示している。
図10に示すように、危険率5%の範囲で、上述の本発明が適用される図1の鉗子システム1の方が、従来の鉗子と比較して、有意な傾向を示していることが確認できた。
前記駆動部は、空気圧により前記駆動力を発生し、
前記駆動力の実績値を検出する第2検出部(例えば図1のバルブボックス13に内蔵する図示せぬ圧力センサ)をさらに備え、
前記制御部は、
前記鉗子先端部の前記屈曲方向及び前記屈曲角度と、前記鉗子先端部への駆動力との対応関係を予め保持しており、
前記対応関係に基づいて、前記目標屈曲方向及び前記目標屈曲角度から、前記駆動力の目標値を求め、
前記駆動力の目標値と、前記第2検出部により検出された前記駆動力の実績値とに基づいて、前記駆動部を制御する
ことができる。
その結果、駆動部から鉗子先端部にかけて電気的なセンサが一切不要になる。これにより、駆動部から鉗子先端部にかけて滅菌洗浄が容易に可能になる。
これにより、さらに一段と、鉗子マニピュレータの滅菌洗浄が容易となり、運用上優れるという効果を奏することができる。
前記鉗子先端部は、前記屈曲方向と前記屈曲角度との2自由度での屈曲を可能とする柔軟関節(例えば図4の柔軟関節32)を有する、
これにより、鉗子先端部の操作性が向上し、複雑な作業が可能となる。
11 鉗子マニピュレータ
12 制御部
13 バルブボックス
14 空気圧配管
21 鉗子先端部
22 駆動部
23 駆動部
24 センサ部
25 操作部
26 保持部
31a1 ワイヤ
31a2 ワイヤ
31b1 ワイヤ
31b2 ワイヤ
31a ワイヤ群
31b ワイヤ群
32 柔軟関節
33 把持部
41a 空気圧シリンダ群
41b 空気圧シリンダ群
50 空気圧供給源
51 圧力調整弁
Claims (4)
- 屈曲方向と屈曲角度との2自由度での屈曲を可能とする鉗子先端部と、
前記鉗子先端部への駆動力を発生する駆動部と、
前記駆動力を前記鉗子先端部に伝達する棒状の駆動伝達部と、
前記駆動伝達部からみて前記駆動部側に配置され、操作者の操作により前記屈曲方向と前記屈曲角度を指示する操作部と、
前記駆動伝達部の軸を中心とする回転方向の角度を検出する第1検出部と、
を含む鉗子マニピュレータと、
所定の目標屈曲方向及び目標屈曲角度に従って前記鉗子先端部が屈曲するように、前記駆動部を制御する制御部と、
を備え、
前記制御部は、
前記操作部により指示された前記屈曲角度を目標屈曲角度として設定し、
前記操作部により指示された前記屈曲方向と、前記第1検出部により検出された前記角度とに基づいて、目標屈曲方向を設定する、
鉗子システム。 - 前記駆動部は、空気圧により前記駆動力を発生し、
前記駆動力の実績値を検出する第2検出部をさらに備え、
前記制御部は、
前記鉗子先端部の前記屈曲方向及び前記屈曲角度と、前記鉗子先端部への駆動力との対応関係を予め保持しており、
前記対応関係に基づいて、前記目標屈曲方向及び前記目標屈曲角度から、前記駆動力の目標値を求め、
前記駆動力の目標値と、前記第2検出部により検出された前記駆動力の実績値とに基づいて、前記駆動部を制御する
請求項1に記載の鉗子システム。 - 前記鉗子先端部、前記駆動伝達部および前記駆動部は、前記鉗子マニピュレータから自在に着脱可能に構成されている、
請求項1又は2に記載の鉗子システム。 - 前記鉗子先端部は、前記屈曲方向と前記屈曲角度との2自由度での屈曲を可能とする柔軟関節を有する、
請求項1乃至3のうち何れか1項に記載の鉗子システム。
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015140409A JP6602076B2 (ja) | 2015-07-14 | 2015-07-14 | 鉗子システム |
| PCT/JP2016/070560 WO2017010482A1 (ja) | 2015-07-14 | 2016-07-12 | 鉗子システム |
| US15/743,329 US10675047B2 (en) | 2015-07-14 | 2016-07-12 | Forceps system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015140409A JP6602076B2 (ja) | 2015-07-14 | 2015-07-14 | 鉗子システム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017018465A true JP2017018465A (ja) | 2017-01-26 |
| JP6602076B2 JP6602076B2 (ja) | 2019-11-06 |
Family
ID=57757322
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015140409A Expired - Fee Related JP6602076B2 (ja) | 2015-07-14 | 2015-07-14 | 鉗子システム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US10675047B2 (ja) |
| JP (1) | JP6602076B2 (ja) |
| WO (1) | WO2017010482A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021037294A (ja) * | 2017-12-29 | 2021-03-11 | ザ ボード オブ リージェンツ オブ ザ ユニバーシティー オブ テキサス システム | エンドエフェクタおよびエンドエフェクタドライブ装置 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN117320659A (zh) * | 2021-05-19 | 2023-12-29 | 柯惠有限合伙公司 | 用于诸如用于机器人外科系统中的外科器械的致动组件 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07255735A (ja) * | 1994-03-17 | 1995-10-09 | Terumo Corp | 外科用器具 |
| JP2004329624A (ja) * | 2003-05-08 | 2004-11-25 | Olympus Corp | 外科用処置具 |
| WO2014069003A1 (ja) * | 2012-11-01 | 2014-05-08 | 国立大学法人東京工業大学 | 鉗子マニピュレータ、および鉗子マニピュレータを備える鉗子システム |
| JP2014529436A (ja) * | 2011-08-25 | 2014-11-13 | アンドコントロルEndocontrol | 係合解除可能なハンドル付きの手術器具 |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5649955A (en) | 1994-03-17 | 1997-07-22 | Terumo Kabushiki Kaisha | Surgical instrument |
| EP1584300A3 (en) * | 2004-03-30 | 2006-07-05 | Kabushiki Kaisha Toshiba | Manipulator apparatus |
| JP6114583B2 (ja) * | 2013-03-14 | 2017-04-12 | カール シュトルツ ゲゼルシャフト ミット ベシュレンクテル ハフツング ウント コンパニー コマンディートゲゼルシャフト | 医療用マニピュレータ |
-
2015
- 2015-07-14 JP JP2015140409A patent/JP6602076B2/ja not_active Expired - Fee Related
-
2016
- 2016-07-12 US US15/743,329 patent/US10675047B2/en not_active Expired - Fee Related
- 2016-07-12 WO PCT/JP2016/070560 patent/WO2017010482A1/ja active Application Filing
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07255735A (ja) * | 1994-03-17 | 1995-10-09 | Terumo Corp | 外科用器具 |
| JP2004329624A (ja) * | 2003-05-08 | 2004-11-25 | Olympus Corp | 外科用処置具 |
| JP2014529436A (ja) * | 2011-08-25 | 2014-11-13 | アンドコントロルEndocontrol | 係合解除可能なハンドル付きの手術器具 |
| WO2014069003A1 (ja) * | 2012-11-01 | 2014-05-08 | 国立大学法人東京工業大学 | 鉗子マニピュレータ、および鉗子マニピュレータを備える鉗子システム |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021037294A (ja) * | 2017-12-29 | 2021-03-11 | ザ ボード オブ リージェンツ オブ ザ ユニバーシティー オブ テキサス システム | エンドエフェクタおよびエンドエフェクタドライブ装置 |
| JP7094334B2 (ja) | 2017-12-29 | 2022-07-01 | ザ ボード オブ リージェンツ オブ ザ ユニバーシティー オブ テキサス システム | エンドエフェクタおよびエンドエフェクタドライブ装置 |
| US11969182B2 (en) | 2017-12-29 | 2024-04-30 | Board Of Regents Of The University Of Texas System | End effector and end effector drive apparatus |
| US12011188B2 (en) | 2017-12-29 | 2024-06-18 | Board Of Regents Of The University Of Texas System | End effector and end effector drive apparatus |
Also Published As
| Publication number | Publication date |
|---|---|
| US10675047B2 (en) | 2020-06-09 |
| WO2017010482A1 (ja) | 2017-01-19 |
| US20180199953A1 (en) | 2018-07-19 |
| JP6602076B2 (ja) | 2019-11-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN111315309B (zh) | 用于控制机器人操纵器或相关工具的系统和方法 | |
| US9731415B2 (en) | Method for the alignment of a multiaxial manipulator with an input device | |
| CA2973227C (en) | Autonomous correction of alignment error in a master-slave robotic system | |
| JP5044659B2 (ja) | 最小侵入ロボット手術システムのための応力推定方法 | |
| CN113195174B (zh) | 引导工具改变 | |
| JP2016538894A (ja) | ジェスチャ制御を用いるロボットシステム制御用の制御装置及び方法 | |
| CN110464470B (zh) | 手术机器人及其臂体的控制方法、控制装置 | |
| JP6602076B2 (ja) | 鉗子システム | |
| US20240293930A1 (en) | Systems and methods for motion control of steerable devices | |
| CN110464469B (zh) | 手术机器人及末端器械的控制方法、控制装置、存储介质 | |
| GB2593738A (en) | Control system of a surgical robot | |
| JP2022549347A (ja) | 異常なセンサ信号の存在下で可撓性デバイスを制御するための方法及びシステム | |
| WO2020209165A1 (ja) | 外科手術システム及び外科手術システムの制御方法 | |
| US20240173856A1 (en) | Systems and methods for controlling a robotic manipulator or associated tool | |
| KR101479077B1 (ko) | 직관적 조작이 가능한 조작 손잡이를 갖는 로봇시스템 | |
| Miayazaki et al. | Pneumatically-driven hand-held forceps with wrist joint operated by built-in master controller |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180525 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190319 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190520 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190716 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190910 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190917 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20191008 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6602076 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |