JP2017009432A - Information processing device, method for correcting measurement value, and program - Google Patents
Information processing device, method for correcting measurement value, and program Download PDFInfo
- Publication number
- JP2017009432A JP2017009432A JP2015124797A JP2015124797A JP2017009432A JP 2017009432 A JP2017009432 A JP 2017009432A JP 2015124797 A JP2015124797 A JP 2015124797A JP 2015124797 A JP2015124797 A JP 2015124797A JP 2017009432 A JP2017009432 A JP 2017009432A
- Authority
- JP
- Japan
- Prior art keywords
- load
- correction coefficient
- user
- correction
- stance
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000005259 measurement Methods 0.000 title claims abstract description 93
- 238000000034 method Methods 0.000 title claims abstract description 39
- 230000010365 information processing Effects 0.000 title claims description 53
- 238000012937 correction Methods 0.000 claims abstract description 235
- 238000004364 calculation method Methods 0.000 claims abstract description 54
- 230000033001 locomotion Effects 0.000 claims abstract description 31
- 238000003825 pressing Methods 0.000 claims description 17
- 230000004044 response Effects 0.000 claims description 5
- 230000002708 enhancing effect Effects 0.000 abstract 1
- 238000012545 processing Methods 0.000 description 37
- 230000008859 change Effects 0.000 description 14
- 230000008569 process Effects 0.000 description 13
- 230000006870 function Effects 0.000 description 10
- 230000000875 corresponding effect Effects 0.000 description 7
- 238000010586 diagram Methods 0.000 description 4
- 230000037396 body weight Effects 0.000 description 3
- 238000006243 chemical reaction Methods 0.000 description 3
- 230000006866 deterioration Effects 0.000 description 3
- 230000035945 sensitivity Effects 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 230000008901 benefit Effects 0.000 description 1
- 230000005540 biological transmission Effects 0.000 description 1
- 230000015556 catabolic process Effects 0.000 description 1
- 230000001276 controlling effect Effects 0.000 description 1
- 230000002596 correlated effect Effects 0.000 description 1
- 238000010219 correlation analysis Methods 0.000 description 1
- 238000006731 degradation reaction Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000005021 gait Effects 0.000 description 1
- 238000000611 regression analysis Methods 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
Images








Abstract
Description
本発明は、情報処理装置、測定値の補正方法、及びプログラムに関する。 The present invention relates to an information processing apparatus, a measurement value correction method, and a program.
人の歩行動作を解析する方法の1つに、歩行足が地面にかける負荷(足圧など)を計測し、その時間変化等を解析する方法がある。このような解析を行うために、上述の負荷を測定するための機器が開発されている。 One of the methods for analyzing a person's walking motion is a method of measuring a load (foot pressure or the like) applied to the ground by a walking foot and analyzing its temporal change or the like. In order to perform such an analysis, a device for measuring the above-described load has been developed.
このような機器の一つに、床の一部に設置される床反力計(フォースプレート)という機器がある。床反力計は、ひずみセンサーを用いており、足圧の絶対値を計測することができる。しかし一般に、床反力計は、高価であること、及び予め床の一部に設置しておく必要があることなどから、汎用性が低い。 One of such devices is a floor reaction force meter (force plate) installed on a part of the floor. The floor reaction force meter uses a strain sensor and can measure the absolute value of foot pressure. However, generally, the floor reaction force meter is low in versatility because it is expensive and needs to be installed in advance on a part of the floor.
そこで、歩行足が地面にかける負荷を測定するための他の機器として、ゴムスポンジバネなどを用いた比較的安価なセンサで構成される足圧分布センサなどが用いられている。 Therefore, as another device for measuring the load applied by the walking foot to the ground, a foot pressure distribution sensor composed of a relatively inexpensive sensor using a rubber sponge spring or the like is used.
足圧分布センサなどの安価なセンサは、センサに用いるゴムの弾性や劣化などの要因により、測定された負荷に含まれる誤差が大きい。また、その誤差は経時的に積算していく。そのため、これらの安価なセンサを用いる場合、歩行足が地面にかける負荷を正確に把握することが難しい。 An inexpensive sensor such as a foot pressure distribution sensor has a large error included in the measured load due to factors such as elasticity and deterioration of rubber used in the sensor. The error is integrated over time. Therefore, when using these inexpensive sensors, it is difficult to accurately grasp the load that the walking foot applies to the ground.
ここで、特許文献1は、足圧センサの劣化を判定するシステムを開示している。このシステムを用いることでセンサの劣化を把握できるため、劣化したセンサを使い続けることを防止することができる。しかし、このシステムを用いても、センサの測定精度を高くすることはできない。 Here, patent document 1 is disclosing the system which determines degradation of a foot pressure sensor. By using this system, it is possible to grasp the deterioration of the sensor, and thus it is possible to prevent the deterioration sensor from being used continuously. However, even if this system is used, the measurement accuracy of the sensor cannot be increased.
本発明は、上記課題に鑑みてなされたものである。本発明の目的は、人が歩行動作で地面にかける負荷の測定精度を高くする技術を提供することである。 The present invention has been made in view of the above problems. An object of the present invention is to provide a technique for increasing the measurement accuracy of a load applied to a ground by a person walking.
本発明の情報処理装置は、ユーザの歩行動作中の或る一歩について負荷測定器によって測定された、ミッドスタンスにおいて立脚足が地面にかける第1の負荷、ターミナルスタンスにおいて立脚足が地面にかける第2の負荷、及びプレスイングにおいて立脚足が地面にかける第3の負荷の各測定値を用いて補正係数を算出する補正係数算出手段と、前記補正係数を用いて、前記負荷測定器の測定値を補正する補正手段と、を有する。 The information processing apparatus according to the present invention is the first load applied by the leg to the ground in the mid stance and the first leg applied to the ground in the terminal stance, which is measured by the load measuring device for a certain step during the user's walking motion. Correction coefficient calculating means for calculating a correction coefficient using each load of the second load and a third load applied by the stance leg to the ground in pressing, and a measurement value of the load measuring instrument using the correction coefficient And a correcting means for correcting.
本発明の測定値の補正方法は、好ましくはコンピュータによって実行される。当該測定値の補正方法は、ユーザの歩行動作中の或る一歩について負荷測定器によって測定された、ミッドスタンスにおいて立脚足が地面にかける第1の負荷、ターミナルスタンスにおいて立脚足が地面にかける第2の負荷、及びプレスイングにおいて立脚足が地面にかける第3の負荷の各測定値を用いて補正係数を算出する補正係数算出ステップと、前記補正係数を用いて、前記負荷測定器の測定値を補正する補正ステップと、を有する。 The measurement value correction method of the present invention is preferably executed by a computer. The measurement value correction method includes a first load applied by the leg to the ground in a mid stance and a step applied by the leg to the ground in a terminal stance, which are measured by a load measuring device for a certain step during the user's walking motion. A correction coefficient calculating step of calculating a correction coefficient using each load of the second load and a third load applied by the stance leg to the ground in pressing, and the measured value of the load measuring instrument using the correction coefficient And a correction step for correcting.
本発明のプログラムは、本発明の測定値の補正方法をコンピュータに実行させるプログラムである。 The program of the present invention is a program that causes a computer to execute the measurement value correction method of the present invention.
本発明によれば、人が歩行動作で地面にかける負荷の測定精度を高くする技術が提供される。 ADVANTAGE OF THE INVENTION According to this invention, the technique which raises the measurement precision of the load which a person applies to a ground by walking motion is provided.
以下、本発明の実施の形態について、図面を用いて説明する。尚、すべての図面において、同様な構成要素には同様の符号を付し、適宜説明を省略する。 Hereinafter, embodiments of the present invention will be described with reference to the drawings. In all the drawings, the same reference numerals are given to the same components, and the description will be omitted as appropriate.
[実施形態1]
図1は、実施形態1に係る情報処理装置2000を例示するブロック図である。図1において、各ブロックは、ハードウエア単位の構成ではなく、機能単位の構成を表している。
[Embodiment 1]
FIG. 1 is a block diagram illustrating an
情報処理装置2000は、補正係数算出部2020及び補正部2040を有する。補正係数算出部2020は、ユーザが歩行動作中の一歩において地面にかける負荷の測定値を用いて、その一歩に関する補正係数を算出する。ここで、地面にかける負荷とは、ユーザの立脚足が地面にかける圧力(足圧)や荷重などを意味する。補正係数算出部2020が用いる測定値は、1)ミッドスタンスにおいてユーザの立脚足が地面にかける第1負荷、2)ターミナルスタンスにおいてユーザの立脚足が地面にかける第2負荷、及び3)プレスイングにおいてユーザの立脚足が地面にかける第3負荷のそれぞれを測定した値である。ミッドスタンス、ターミナルスタンス、及びプレスイングはいずれも、ユーザの歩行動作における一歩の動作を複数の期間に分類した各期間の名称であり、歩行分析の分野で一般に用いられる用語である。つまり補正係数算出部2020は、ユーザの立脚足が一歩の動作で地面にかける負荷のうち、上記3つの期間のそれぞれの中で測定された負荷の測定値を用いて、補正係数を算出する。なお、ミッドスタンス等の各期間についての詳細、及び補正係数算出部2020が各負荷の測定値を取得する方法についての説明は後述する。また、各負荷の測定値を用いて補正係数を算出する方法については、後述の各実施形態で説明する。
The
補正部2040は、補正係数算出部2020によって算出された補正係数を用いて、上記負荷を測定する負荷測定器の測定値を補正する。この負荷測定器は、例えば足圧分布センサや荷重センサなどである。ただし、ユーザが歩行動作中の一歩において地面にかける負荷を測定可能であれば、負荷測定器自体は何ら制限されない。なお、測定値の補正に関する詳細は、後述の各実施形態で説明する。
The
<作用・効果>
本実施形態の情報処理装置2000によれば、ユーザの一歩ごとの動作における上記3つの期間で、立脚足が地面にかける負荷に基づき、補正係数が算出される。そして、この補正係数に基づいて、測定器(足圧分布センサなど)の測定値が補正される。このように、本実施形態によれば、測定器により測定される、ユーザの歩行中に立脚足が地面にかける負荷の測定値を、立脚足が地面にかける負荷の代表値(第1の負荷、第2の負荷、及び第3の負荷)に基づいて算出される補正係数に基づいて補正するため、測定器の測定感度誤差を一歩ごとに修正することができる。よって、本実施形態によれば、測定器の種類や仕様に依存することなく、人が歩行動作で地面にかける負荷の測定精度を高めることができる。そのため、足圧分布センサなどの安価のセンサを用いたとしても、ユーザの歩行足が地面にかける負荷を高い精度で把握できるようになる。
<Action and effect>
According to the
以下、実施形態1の情報処理装置2000について、さらに詳しく説明する。
Hereinafter, the
<ハードウエア構成例>
実施形態1の情報処理装置2000の各機能構成部は、各機能構成部を実現するハードウエア(例:ハードワイヤードされた電子回路など)で実現されてもよいし、ハードウエアとソフトウエアとの組み合わせ(例:電子回路とそれを制御するプログラムの組み合わせなど)で実現されてもよい。以下、情報処理装置2000の各機能構成部がハードウエアとソフトウエアとの組み合わせで実現される場合について、さらに説明する。
<Hardware configuration example>
Each functional component of the
図2は、情報処理装置2000を実現する計算機1000のハードウエア構成を例示するブロック図である。計算機1000は、情報処理装置2000の実装に用いられる計算機であり、例えば PC 、サーバマシン、又は携帯端末(スマートフォンなど)などの種々の計算機である。また、計算機1000は、後述する負荷測定器10に組み込まれてもよい。計算機1000は、情報処理装置2000を実装するための専用の計算機であってもよいし、様々なアプリケーションが動作する汎用の計算機を用いて実装されてもよい。
FIG. 2 is a block diagram illustrating a hardware configuration of a
計算機1000は、バス1020、プロセッサ1040、メモリ1060、ストレージ1080、及び入出力インタフェース1100を有する。バス1020は、プロセッサ1040、メモリ1060、ストレージ1080、及び入出力インタフェース1100が、相互にデータを送受信するためのデータ伝送路である。ただし、プロセッサ1040などを互いに接続する方法は、バス接続に限定されない。プロセッサ1040は、例えば CPU (Central Processing Unit) や GPU (Graphics Processing Unit) などの演算処理装置である。メモリ1060は、例えば RAM (Random Access Memory) や ROM (Read Only Memory) などのメモリである。ストレージ1080は、例えばハードディスク、SSD (Solid State Drive)、又はメモリカードなどの外部記憶装置である。
The
入出力インタフェース1100は、計算機1000と外部のデバイスとを接続するためのインタフェースである。外部のデバイスは、例えば負荷測定器10である。負荷測定器10は、ユーザの足が地面にかける負荷の測定に用いられる測定器である。負荷測定器10は、例えば足圧分布センサや荷重センサを用いて構成される。前述したように、計算機1000は負荷測定器10に組み込まれていてもよい。また、計算機1000と負荷測定器10とは、直接接続されていなくてもよい。この場合、負荷測定器10が測定結果を記憶装置等に記憶し、計算機1000はその記憶装置等からその測定結果を取得する。
The input /
さらに、入出力インタフェース1100には、補正部2040によって補正された測定値の出力先とする表示画面等が接続されていてもよい。ただし、補正部2040によって補正された測定値の出力先は、表示画面に限定されない。例えば補正部2040は、補正した測定値を記憶装置等(例えばストレージ1080)に記憶してもよい。
Furthermore, the input /
ストレージ1080は、情報処理装置2000の各機能を実現するためのプログラムを記憶している。具体的には、ストレージ1080は、補正係数算出部2020及び補正部2040の機能を実現するプログラムモジュールを記憶している。プロセッサ1040は、これら各プログラムモジュールを実行することで、補正係数算出部2020及び補正部2040の機能をそれぞれ実現する。ここでプロセッサ1040は、上記各モジュールを実行する際、これらのモジュールをメモリ1060上に読み出してから実行する。
The
情報処理装置2000のハードウエア構成は図2に示した構成に限定されない。例えば、各プログラムモジュールはメモリ1060に格納されてもよい。この場合、情報処理装置2000は、ストレージ1080を備えていなくてもよい。
The hardware configuration of the
<処理の流れ>
図3は、実施形態1の情報処理装置2000によって実行される処理の流れを例示するフローチャートである。補正係数算出部2020は、第1負荷、第2負荷、及び第3負荷の測定値を取得する(S102)。補正係数算出部2020は、取得した第1負荷、第2負荷、及び第3負荷の測定値を用いて、補正係数を算出する(S104)。補正部2040は、上記補正係数を用いて負荷測定器10の測定値を補正する(S106)。
<Process flow>
FIG. 3 is a flowchart illustrating the flow of processing executed by the
<歩行動作における期間の分類について>
歩行分析の分野において、人の歩行動作における一歩が、複数の期間に分類されている。非特許文献1は、ユーザの一歩が地面に負荷をかける(ユーザの身体を支える)期間(立脚期)を、1)イニシャルコンタクト、2)ローディングレスポンス、3)ミッドスタンス、4)ターミナルスタンス、5)プレスイングという5つの期間に分類している。これらの各期間はそれぞれ、立脚期を 0% から 100% の期間として表した場合に、1)0%、2)0% から 20%、3)20% から 50%、4)50% から 80%、5)80% から 100% の各期間である。
<Classification of periods in walking motion>
In the field of gait analysis, one step in a person's walking movement is classified into a plurality of periods. Non-Patent Document 1 describes a period (stance phase) in which a user's step applies a load to the ground (supports the user's body) (1) initial contact, 2) loading response, 3) mid stance, 4) terminal stance, 5 ) It is classified into five periods called pressing. Each of these periods is 1) 0%, 2) 0% to 20%, 3) 20% to 50%, 4) 50% to 80, when the stance is expressed as a period from 0% to 100%. %, 5) Each period from 80% to 100%.
前述したように、補正係数算出部2020が用いる測定値は、ミッドスタンスにおいてユーザの立脚足が地面にかける第1負荷、ターミナルスタンスにおいてユーザの立脚足が地面にかける第2負荷、及びプレスイングにおいてユーザの立脚足が地面にかける第3負荷のそれぞれを測定した値である。言い換えれば、第1負荷、第2負荷、及び第3負荷はそれぞれ、ユーザの一歩の動作の立脚期における 20% から 50% の期間(ミッドスタンス)において測定された負荷、50% から 80% の期間(ターミナルスタンス)において測定された負荷、及び 80% から 100% の期間(プレスイング)において測定された負荷である。
As described above, the measurement values used by the correction
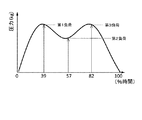
図4は、ユーザの一歩において立脚足が地面にかける負荷の時間変化を例示するグラフである。横軸は時間軸であり、立脚期の長さを 100% として表している。縦軸はセンサによって測定された足圧である。 FIG. 4 is a graph illustrating the time change of the load that the stance leg puts on the ground in one step of the user. The horizontal axis is the time axis and represents the length of the stance phase as 100%. The vertical axis is the foot pressure measured by the sensor.
第1負荷、第2負荷、及び第3負荷は、例えば、点 a、b、及び c それぞれに対応する足圧である。図4において、点 a は、ミッドスタンスに含まれる 39% 時間に対応している。点 b は、ターミナルスタンスに含まれる 57% 時間に対応している。点 c は、プレスイングに含まれる 82% 時間に対応している。 The first load, the second load, and the third load are foot pressures corresponding to points a, b, and c, for example. In Fig. 4, point a corresponds to 39% time included in the midstance. Point b corresponds to 57% of the time included in the terminal stance. Point c corresponds to 82% of the time included in pressing.
<補正係数算出部2020が測定値を取得する処理>
補正係数算出部2020は各負荷の測定値を取得する(S102)。負荷測定器10は、少なくとも上述のミッドスタンス、ターミナルスタンス、及びプレスイングにおいてユーザが地面にかける負荷を計測する。例えば負荷測定器10は、負荷を測定するセンサの出力を所定のサンプリングレートでサンプリングし、サンプリングした値を測定値として出力する。そして補正係数算出部2020は、サンプリングされた値の内、ミッドスタンス、ターミナルスタンス、及びプレスイングのそれぞれで測定された測定値を、第1負荷、第2負荷、及び第3負荷として取得する。
<Processing in which correction
The correction
ここで、ミッドスタンス等は幅を持つ期間である(例えばミッドスタンスは立脚期における 20% から 50% の期間である)ため、これらの期間のうち、具体的にどの時点で得られた測定値を第1負荷等として取得するのかを定めておく必要がある。そこで例えば、補正係数算出部2020は、ミッドスタンスに含まれる第1の所定タイミング、ターミナルスタンスに含まれる第2の所定タイミング、及びプレスイングに含まれる第3の所定タイミングのそれぞれで測定された測定値を、第1負荷、第2負荷、及び第3負荷として取得する。例えば第1の所定タイミング、第2の所定タイミング、第3の所定タイミングはそれぞれ、図4における 39% 時間、57% 時間、及び 82% 時間である。
Here, mid stance etc. is a period with a wide range (for example, mid stance is a period of 20% to 50% in the stance phase). Must be determined as the first load or the like. Therefore, for example, the correction
上記各所定タイミングは、補正係数算出部2020に予め設定されていてもよいし、情報処理装置2000からアクセス可能な記憶装置に記憶しておいてもよい。後者の場合、補正係数算出部2020は、この記憶装置から各所定タイミングを表す情報を取得して利用する。
Each of the predetermined timings may be set in advance in the correction
なお補正係数算出部2020は、負荷測定器10から直接測定値を取得してもよいし、負荷測定器10の測定値が記憶されている記憶装置などから測定値を取得してもよい。また、補正係数算出部2020は、ユーザによって手動で入力される測定値を取得してもよい。
The correction
[実施形態2]
実施形態2に係る情報処理装置2000は、例えば実施形態1と同様に図1で表される。以下で説明する点を除き、実施形態2の情報処理装置2000は、実施形態1の情報処理装置2000と同様である。
[Embodiment 2]
An
実施形態2の補正係数算出部2020は、上述の第1負荷、第2負荷、及び第3負荷の測定値を用いて、ユーザの推定体重を算出する。実施形態2の補正部2040は、ユーザの体重の真値と、補正係数算出部2020によって算出されたそのユーザの推定体重との比を、前述の補正係数として用いて、負荷測定器10の測定値を補正する。こうすることで、負荷測定器10による測定の精度を高くすることができる。以下、さらに詳細に説明する。
The correction
<補正係数算出部2020が行う処理の詳細>
まず補正係数算出部2020は、第1から第3の負荷の測定値を用いてユーザの推定体重を算出する。例えば補正係数算出部2020は、以下の数式(1)を用いて、ユーザの推定体重を算出する。

First, the correction
各係数 ai を決定する方法は様々である。例えば各係数は、「ユーザの体重の真値、第1負荷、第2負荷、第3負荷」の組み合わせで表されるテストデータを複数用意して相関解析や重回帰分析等を行うことで算出できる。 There are various ways to determine each coefficient a i . For example, each coefficient is calculated by preparing multiple test data represented by a combination of “true value of user's weight, first load, second load, third load” and performing correlation analysis, multiple regression analysis, etc. it can.
さらに補正係数算出部2020は、例えば以下の数式(2)を用いて、上記推定体重 We を、別途体重計などで求めてあるユーザの体重の真値 Wr と比較することで、測定した一歩における補正係数αを求める。
上述のように第1負荷、第2負荷、及び第3負荷の測定値を用いることにより、補正係数算出部2020は、ユーザの推定体重を精度良く算出することができる。図5は、数式(1)を用いて算出したユーザの推定体重の精度を表すグラフである。ここでは、a1 = 0.611、a2 = 0.226、及び a3 = 0.282 としてユーザの推定体重を算出している。X軸はユーザの推定体重を表し、Y軸はユーザの体重の真値を表す。
As described above, by using the measured values of the first load, the second load, and the third load, the correction
図5において、決定係数 R2 が 0.9406 であり、ユーザの推定体重と体重の真値との間に高い相関があることが分かる。このように人の歩行動作には、「ミッドスタンス、ターミナルスタンス、及びプレスイングそれぞれにおいてユーザが地面にかける負荷と、ユーザの体重との間には、高い相関がある」という自然法則が内在している。本実施形態の情報処理装置2000は、この自然法則を利用することでユーザの体重を高い精度で推定できるという技術的意義を持つ。
In FIG. 5, the determination coefficient R 2 is 0.9406, and it can be seen that there is a high correlation between the estimated weight of the user and the true value of the weight. As described above, the human walking motion has a natural law that “the load applied to the ground by the user in each of the mid stance, terminal stance, and pressing is highly correlated with the user's weight”. ing. The
なお、補正係数算出部2020が行う処理は、計算機1000によって行われる処理であってもよいし、手動で行われる処理であってもよい。さらに、補正係数算出部2020が行う処理は、計算機1000による処理と手動による処理との組み合わせでもよい。計算機1000による処理と手動による処理との組み合わせの場合、例えば人が計算機1000に対して各負荷の測定値を入力し、計算機1000がその入力値を用いて推定体重を算出する。
Note that the processing performed by the correction
ここで補正係数算出部2020は、ユーザの一歩について負荷測定器10が測定した測定値を4つ以上用いてユーザの推定体重を算出してもよい。例えば補正係数算出部2020は、上記第1負荷から第3負荷に加え、ローディングレスポンスにおいてユーザの立脚足が地面にかける第4負荷、及びターミナルスタンスにおいて上記第3負荷とは異なるタイミングでユーザの立脚足が地面にかける第5負荷を用いて、ユーザの推定体重を算出する。
Here, the correction
上記5つの負荷を用いてユーザの推定体重を算出する場合、例えば補正係数算出部2020は、下記の数式(3)を用いてユーザの推定体重を算出する。
<補正部2040が行う処理の詳細>
補正部2040は、ユーザの体重の真値、及び補正係数算出部2020によって算出されたユーザの推定体重を取得する。ユーザの体重の真値は、例えば別途の方法で予め測定された値である。例えばユーザの体重の真値は、体重計などを用いて測定された値である。また例えば、ユーザの体重の真値は、ユーザから申告された値でもよい。
<Details of Processing Performed by
The
補正部2040は、記憶装置等に記憶されているユーザの体重の真値を取得してもよいし、ユーザによって手動で入力されるユーザの体重の真値を取得してもよい。
The
補正部2040は、例えば以下の数式(4)を用いて負荷測定器10の測定値を補正する。
<具体例>
図6は、負荷測定器10の出力が補正部2040によって補正された様子を表すグラフである。X軸は立脚期の長さを 100% 時間とする相対時間を表し、Y軸は負荷測定器10の測定値を表す。本例における負荷測定器10のセンサは足圧分布センサである。そのため、Y軸は足圧の大きさを表す。点線は補正前の足圧(負荷測定器10の出力)の変化を表し、実線は補正後の足圧(補正された負荷測定器10の出力)の変化を表す。
<Specific example>
FIG. 6 is a graph showing how the output of the
図6の場合、ユーザの推定体重が 65kg であり、ユーザの体重の真値は 70kg である。そのため、補正部2040は、負荷測定器10の各測定値を 1.08(=70/65)倍することで補正する。
In the case of FIG. 6, the estimated weight of the user is 65 kg, and the true value of the user's weight is 70 kg. Therefore, the
なお、補正部2040が行う処理は、計算機1000によって行われる処理であってもよいし、手動で行われる処理であってもよい。さらに、補正部2040が行う処理は、計算機1000による処理と手動による処理との組み合わせでもよい。計算機1000による処理と手動による処理との組み合わせの場合、例えば人が計算機1000に対してユーザの推定体重を入力し、計算機1000がその入力された推定体重の補正を行う。
Note that the processing performed by the
<補正部2040の利用例>
例えば補正部2040は、負荷測定器10の内部に設けられる。こうすることで、センサの出力をそのまま測定値として外部に出力するのではなく、補正部2040によって補正された値を測定値として外部に出力するように、負荷測定器10を構成する。
<Example of Use of
For example, the
このように構成された負荷測定器10を利用する場合、負荷測定器10に対し、測定対象のユーザの体重の真値を設定する。そして、測定対象のユーザが、負荷測定器10のセンサの上で歩行動作を行う。補正係数算出部2020は、ユーザのある一歩が負荷測定器10のセンサに対して負荷をかけた際にセンサによって出力される値(第1負荷等)を取得し、ユーザの推定体重を算出する。補正部2040は、予め設定されているユーザの体重の真値及び算出されたユーザの推定体重との比を用いて、上記一歩について負荷測定器10のセンサが出力した一連の測定値を補正する。負荷測定器10は、補正部2040によって補正された各測定値を、負荷測定器10の各測定値として出力する(例えば表示画面に表示する)。
When the
このように負荷測定器10を構成することにより、負荷測定器10によって出力される測定値の精度が高くなる。例えば図6のケースでは、負荷測定器10が外部に出力する値が、点線で表された一連の値(補正前の値)ではなく、実線で表された一連の値(補正後の値)となる。
By configuring the
ただし補正部2040は、負荷測定器10の外部に設けられてもよい。この場合、補正部2040は、例えばユーザの歩行動作の解析を行う計算機などに設けられる。補正部2040を利用することで、ユーザの歩行動作の解析など、負荷測定器10の測定値を利用する処理の精度が高くなる。
However, the
補正された測定値を表示画面等に出力する処理は、計算機1000によって行われる処理であってもよいし、手動で行われる処理であってもよい。さらに、補正された測定値を表示画面等に出力する処理は、計算機1000による処理と手動による処理との組み合わせでもよい。計算機1000による処理と手動による処理との組み合わせの場合、例えば計算機1000は、補正された測定値を表示画面へ出力する指示を人から受け付けることで、補正された測定値を表示画面へ出力する。
The process of outputting the corrected measurement value to the display screen or the like may be a process performed by the
<ハードウエア構成例>
例えば実施形態2の情報処理装置2000のハードウエア構成は、実施形態1の情報処理装置2000と同様に、図2で表される。本実施形態において、前述したストレージ1080に記憶される各プログラムモジュールには、本実施形態で説明する各機能を実現するプログラムがさらに含まれる。
<Hardware configuration example>
For example, the hardware configuration of the
[実施形態3]
実施形態3に係る情報処理装置2000は、例えば実施形態1と同様に図1で表される。以下で説明する点を除き、実施形態3の情報処理装置2000は、実施形態1の情報処理装置2000と同様である。
[Embodiment 3]
An
実施形態3の情報処理装置2000は、複数の一歩それぞれについて負荷測定器10によって測定された測定値を、相対的に補正する。ユーザが負荷測定器10のセンサ上で歩行動作を行う際、各一歩について負荷測定器10が測定する値には、ユーザの足が地面にかける負荷の違いによる本来的なばらつきだけでなく、負荷測定器10の測定精度に起因するばらつき(センサの誤差などに伴うばらつき)が含まれてしまう。実施形態3の情報処理装置2000によれば、複数の一歩それぞれに関する測定値を相対的に補正することで、このような負荷測定器10の測定精度に起因するばらつきを少なくし、各一歩が地面にかける負荷の違いをより高い精度で比較することができるようになる。よって、負荷測定器10を用いた歩行動作の解析をより高い精度で行うことができるようになる。以下、詳細に説明する。
The
補正係数算出部2020は、ユーザの歩行動作中における複数の一歩それぞれについて、ユーザの立脚足が地面にかける負荷の測定値を取得する。そして補正係数算出部2020は、複数の一歩それぞれの測定値を用いて、各一歩に対応する補正係数を算出する。
The correction
補正部2040は、各一歩に対応する補正係数に基づいて、各一歩に関する負荷の測定値を補正する。補正部2040は、上記複数の一歩の内の1つを基準の一歩として扱う。そして、補正部2040は、基準の一歩以外の一歩に関する負荷の測定値を、その一歩に対応するユーザの補正係数と基準の一歩に対応するユーザの補正係数との比を用いて補正する。
The
例えば補正部2040は、下記の数式(5)を用いて各一歩についての測定値を補正する。
例えば補正係数は、前述したユーザの推定体重である。この場合、αi は第 i の一歩について算出されたユーザの推定体重となり、αb は基準の一歩について算出されたユーザの推定体重となる。つまり、第 i の一歩に関する負荷測定器10の測定値は、第 i の一歩について算出されたユーザの推定体重と基準の一歩について算出されたユーザの推定体重との比を用いて補正される。
For example, the correction coefficient is the estimated weight of the user described above. In this case, α i is the estimated weight of the user calculated for the i-th step, and α b is the estimated weight of the user calculated for the reference step. That is, the measurement value of the
ただし本実施形態において、各一歩に関する補正係数は、その一歩における第1から第3の負荷を用いて算出されるものであれば任意であり、ユーザの推定体重に限定されない。例えば各一歩に関する補正係数は、その一歩における第1から第3の負荷の統計値(平均値、最大値、又は最小値など)である。 However, in the present embodiment, the correction coefficient for each step is arbitrary as long as it is calculated using the first to third loads at that step, and is not limited to the estimated weight of the user. For example, the correction coefficient for each step is a statistical value (average value, maximum value, minimum value, or the like) of the first to third loads at that step.
<具体例>
図7及び図8を用いて、本実施形態の情報処理装置2000の動作例について具体的に説明する。なお、図7及び図8に示すグラフは、あくまで実施形態の理解を深めるための一例である。以下の具体例では、補正係数としてユーザの推定体重を用いている。
<Specific example>
An example of the operation of the
図7及び図8は、あるユーザの第1の一歩から第4の一歩それぞれが地面にかけた負荷を表すグラフである。X軸は立脚期の長さを 100% 時間とする相対時間を表し、Y軸は負荷測定器10の測定値を表す。本例における負荷測定器10のセンサは足圧分布センサである。そのため、Y軸は足圧の大きさを表す。線30は第1の一歩における足圧の変化、線40は第2の一歩における足圧の変化、線50は第3の一歩における足圧の変化、線60は第4の一歩における足圧の変化をそれぞれ表す。
FIG. 7 and FIG. 8 are graphs showing a load applied to the ground by a first step to a fourth step of a certain user. The X axis represents relative time with the length of the stance phase as 100% time, and the Y axis represents the measurement value of the
図7は補正前の各一歩の足圧の変化を表す。一方、図8は、補正後の各一歩の足圧の変化を表す。本例では、第1の一歩について算出された推定体重、第2の一歩について算出された推定体重、第3の一歩について算出された推定体重、第4の一歩について算出された推定体重がそれぞれ 65kg、63kg、70kg、55kg であるとする。 FIG. 7 shows changes in foot pressure at each step before correction. On the other hand, FIG. 8 shows changes in foot pressure at each step after correction. In this example, the estimated weight calculated for the first step, the estimated weight calculated for the second step, the estimated weight calculated for the third step, and the estimated weight calculated for the fourth step are 65 kg. 63kg, 70kg, 55kg.
本例において、補正部2040は第1の一歩を基準の一歩として扱う。そこで、補正部2040は、第2の一歩についての測定値、第3の一歩についての測定値、第4の一歩についての測定値をそれぞれ 0.97(=63/65)倍、1.08(=70/65)倍、0.85(=55/65)倍する。その結果、図7の各グラフが図8の同符号の各グラフに補正される。
In this example, the
このような補正により、負荷測定器10のセンサの感度等が要因となる測定誤差を排除して、各一歩が地面にかける負荷を正しく比較することができるようになる。例えば、第1の一歩の足圧(線30)と第3の一歩を表す足圧(線50)とを比較することを考える。図7を見ると、線50は一つ目の山と二つ目の山の双方において線30よりも大きいように見える。ところが、図8を見ると、一つ目の山については線30と線50とがほぼ同じ大きさであり、二つ目の山については線30の方が線50よりも大きくなっていることがわかる。このことから、補正前のデータを見ただけでは各一歩が地面にかける負荷を正しく比較することが難しく、補正部2040による補正によって負荷を正しく比較できるようになることが分かる。
Such correction eliminates measurement errors caused by the sensitivity of the sensor of the
なお、基準の一歩として扱う一歩は、第1の一歩に限定されない。例えば補正部2040は、複数の歩の中から、基準の一歩とする歩をランダムに選択してもよい。また例えば、補正部2040は、各一歩のうち、推定体重がユーザの体重の真値に最も近い一歩を基準の一歩としてもよい。この場合、補正部2040は、ユーザの体重の真値を取得する。
Note that the one step treated as a reference step is not limited to the first step. For example, the
補正部2040が行う処理は、計算機1000によって行われる処理であってもよいし、手動で行われる処理であってもよい。さらに、補正部2040が行う処理は、計算機1000による処理と手動による処理との組み合わせでもよい。計算機1000による処理と手動による処理との組み合わせの場合、例えば人が計算機1000に対して「どの歩を基準の一歩にするか」を指定する入力を行い、計算機1000が指定された歩を基準の一歩として補正を行う。
The processing performed by the
<補正部2040の利用例>
例えば補正部2040は、ユーザの歩行動作の解析を行う計算機などに設けられる。例えばこの計算機は、補正部2040によって補正された後のデータを表示画面や記憶装置等に出力する。ただし、補正部2040は、負荷測定器10の内部に設けられてもよい。
<Example of Use of
For example, the
ここで、補正された測定値を表示画面等に出力する処理は、計算機1000によって行われる処理であってもよいし、手動で行われる処理であってもよい。さらに、補正された測定値を表示画面等に出力する処理は、計算機1000による処理と手動による処理との組み合わせでもよい。計算機1000による処理と手動による処理との組み合わせの場合、例えば計算機1000は、補正された測定値を表示画面へ出力する指示を人から受け付けることで、補正された測定値を表示画面へ出力する。
Here, the process of outputting the corrected measurement value to the display screen or the like may be a process performed by the
<実施形態2との組み合わせ>
上述した実施形態3の情報処理装置2000の機能を、実施形態2の情報処理装置2000の機能と組み合わせてもよい。具体的には、補正部2040は、1)実施形態3の補正部2040の機能により、各一歩に関する測定値を相対的に補正した後、2)これら補正後の値を、実施形態2の補正部2040の機能によってさらに補正する。
<Combination with Embodiment 2>
The functions of the
例えば図6、図7及び図8を例に説明する。まず補正部2040は、前述したように、図7で表される測定値を相対的に補正して、図8で表される補正後の測定値を得る。この時、各一歩に関する測定値は、第1の一歩を基準として補正されている。つまり、各一歩に関する補正後の値はいずれも、推定体重が 65kg(第1の一歩における推定体重)となるように補正されている。
For example, FIG. 6, FIG. 7 and FIG. 8 will be described as an example. First, as described above, the
そこで補正部2040は、さらに実施形態2の図6で説明した補正を行う。具体的には、各一歩に関する推定体重はいずれも 65kg であり、かつユーザの体重の真値は 70kg であるため、各一歩に関する上記補正後の測定値を全て 1.08(=70/65)倍する。図9は、図8の各グラフについて y の値を 1.08 倍したグラフを表す。このように、実施形態2と実施形態3の機能を組み合わせることで、各一歩が地面にかける負荷の変化の真のばらつきを比較できるようになる。
Therefore, the
<ハードウエア構成例>
例えば実施形態3の情報処理装置2000のハードウエア構成は、実施形態1の情報処理装置2000と同様に、図2で表される。本実施形態において、前述したストレージ1080に記憶される各プログラムモジュールには、本実施形態で説明する各機能を実現するプログラムがさらに含まれる。
<Hardware configuration example>
For example, the hardware configuration of the
以上、図面を参照して本発明の実施形態について述べたが、これらは本発明の例示であり、上記以外の様々な構成を採用することもできる。 As mentioned above, although embodiment of this invention was described with reference to drawings, these are the illustrations of this invention, Various structures other than the above are also employable.
例えば次に示すような、その本質的部分が人手による補正方法も、本発明の範囲に含まれることは当業者にとっては自明のことであろう。まず補正係数算出ステップにおいて、以下の1)から3)の動作を行う。1)ユーザの歩行動作中に負荷測定器によって測定された測定データの或る一歩についての時間変化を、負荷測定器がグラフとして出力する。2)ミッドスタンスにおいて立脚足が地面にかける第1の負荷の値、ターミナルスタンスにおいて立脚足が地面にかける第2の負荷の値、及びプレスイングにおいて立脚足が地面にかける第3の負荷の値を、上記グラフから人が読み取る。3)読み取った各測定値を用いて、人が補正係数を算出する。 For example, it will be apparent to those skilled in the art that a correction method by which the essential part is manually performed as described below is also included in the scope of the present invention. First, in the correction coefficient calculation step, the following operations 1) to 3) are performed. 1) A load measuring device outputs a time change about a certain step of the measurement data measured by the load measuring device during the user's walking motion as a graph. 2) The first load value that the stance leg applies to the ground in the mid stance, the second load value that the stance leg applies to the ground in the terminal stance, and the third load value that the stance leg applies to the ground in the pressing. Is read from the graph. 3) A person calculates a correction coefficient using each read measurement value.
さらに補正ステップにおいて、補正係数を用いて、上記負荷測定器の測定値を補正する。この補正は、人が行ってもよいし、負荷測定器の補正回路などが行ってもよい。後者の場合、上記補正係数が、人手で上記補正回路に入力される。 Further, in the correction step, the measurement value of the load measuring device is corrected using the correction coefficient. This correction may be performed by a person, or may be performed by a correction circuit of a load measuring device. In the latter case, the correction coefficient is manually input to the correction circuit.
<1> ユーザの歩行動作中の或る一歩について負荷測定器によって測定された、ミッドスタンスにおいて立脚足が地面にかける第1の負荷、ターミナルスタンスにおいて立脚足が地面にかける第2の負荷、及びプレスイングにおいて立脚足が地面にかける第3の負荷の各測定値を用いて補正係数を算出する補正係数算出手段と、
前記補正係数を用いて、前記負荷測定器の測定値を補正する補正手段と、
を有する情報処理装置。
<2> 前記補正係数算出手段は、前記第1の負荷、前記第2の負荷、及び前記第3の負荷を用いて、ユーザの推定体重を算出し、前記ユーザの体重の真値と前記推定された体重との比を前記補正係数として算出する、
<1>に記載の情報処理装置。
<3> 前記補正係数算出手段は、前記ユーザの歩行動作中の第1の一歩について第1の前記補正係数を算出し、前記ユーザの歩行動作中の第2の一歩について第2の前記補正係数を算出し、
前記補正手段は、第1の前記補正係数と第2の前記補正係数との比を用いて、前記第2の一歩の負荷の測定値を補正する、
<1>に記載の情報処理装置。
<4> 前記補正係数算出手段は、
前記第1の一歩について測定された前記第1の負荷、前記第2の負荷、及び前記第3の負荷を用いてユーザの推定体重を算出し、その値を第1の前記補正係数とし、
前記第2の一歩について測定された前記第1の負荷、前記第2の負荷、及び前記第3の負荷を用いてユーザの推定体重を算出し、その値を第2の前記補正係数とし、
前記ユーザの体重の真値と第1の前記補正係数との比を第3の補正係数として算出し、
前記補正手段は、第1の前記補正係数と第2の前記補正係数との比を用いて補正された第2の一歩の負荷の測定値を、第3の前記補正係数を用いてさらに補正する、
<3>に記載の情報処理装置。
<5> 前記補正係数算出手段は、各前記負荷の測定値と、各前記負荷に対応する所定の係数とをそれぞれ掛け合わせた値を合算することで、前記ユーザの推定体重を算出し、前記補正係数の算出に用いる、
<1>乃至<4>いずれか一つに記載の情報処理装置。
<6> 前記補正係数算出手段は、前記負荷測定器によって測定された、前記第1の負荷、前記第2の負荷、前記第3の負荷、ローディングレスポンスにおいて立脚足が地面にかける第4の負荷、及びターミナルスタンスにおいて立脚足が地面にかける負荷であり、前記第2の負荷とは異なるタイミングにおける負荷である第5の負荷の各測定値を用いて、前記補正係数を算出する、
<1>乃至<5>いずれか一つに記載の情報処理装置。
<7> 各前記負荷は、立脚期の長さに対して相対的に定められている各タイミングで測定される、
<1>乃至<6>いずれか一つに記載の情報処理装置。
<8> 前記負荷測定器は足圧分布センサである、<1>乃至<7>いずれか一つに記載の情報処理装置。
<9> ユーザの歩行動作中の或る一歩について負荷測定器によって測定された、ミッドスタンスにおいて立脚足が地面にかける第1の負荷、ターミナルスタンスにおいて立脚足が地面にかける第2の負荷、及びプレスイングにおいて立脚足が地面にかける第3の負荷の各測定値を用いて補正係数を算出する補正係数算出ステップと、
前記補正係数を用いて、前記負荷測定器の測定値を補正する補正ステップと、
を有する測定値の補正方法。
<10> 前記補正係数算出ステップは、前記第1の負荷、前記第2の負荷、及び前記第3の負荷を用いて、ユーザの推定体重を算出し、前記ユーザの体重の真値と前記推定体重との比を前記補正係数として算出する、前記負荷測定器の測定値を補正する、
<9>に記載の測定値の補正方法。
<11> 前記補正係数算出ステップは、前記ユーザの歩行動作中の第1の一歩について第1の前記補正係数を算出し、前記ユーザの歩行動作中の第2の一歩について第2の前記補正係数を算出し、
前記補正ステップは、第1の前記補正係数と第2の前記補正係数との比を用いて、前記第2の一歩の負荷の測定値を補正する、
<9>に記載の測定値の補正方法。
<12> 前記補正係数算出ステップは、
前記第1の一歩について測定された前記第1の負荷、前記第2の負荷、及び前記第3の負荷を用いてユーザの推定体重を算出し、その値を第1の前記補正係数とし、
前記第2の一歩について測定された前記第1の負荷、前記第2の負荷、及び前記第3の負荷を用いてユーザの推定体重を算出し、その値を第2の前記補正係数とし、
前記ユーザの体重の真値と第1の前記補正係数との比を第3の補正係数として算出し、
前記補正ステップは、第1の前記補正係数と第2の前記補正係数との比を用いて補正された第2の一歩の負荷の測定値を、第3の前記補正係数を用いてさらに補正する、
<11>に記載の測定値の補正方法。
<13> 前記補正係数算出ステップは、各前記負荷の測定値と、各前記負荷に対応する所定の係数とをそれぞれ掛け合わせた値を合算することで、前記ユーザの推定体重を算出し、前記補正係数の算出に用いる、
<9>乃至<12>いずれか一つに記載の測定値の補正方法。
<14> 前記補正係数算出ステップは、前記負荷測定器によって測定された、前記第1の負荷、前記第2の負荷、前記第3の負荷、ローディングレスポンスにおいて立脚足が地面にかける第4の負荷、及びターミナルスタンスにおいて立脚足が地面にかける負荷であり、前記第2の負荷とは異なるタイミングにおける負荷である第5の負荷の各測定値を用いて、前記補正係数を算出する、
<9>乃至<13>いずれか一つに記載の測定値の補正方法。
<15> 各前記負荷は、立脚期の長さに対して相対的に定められている各タイミングで測定される、
<9>乃至<14>いずれか一つに記載の測定値の補正方法。
<16> 前記負荷測定器は足圧分布センサである、
<9>乃至<15>いずれか一つに記載の測定値の補正方法。
<17> <9>乃至<16>いずれか一つに記載の測定値の補正方法における各ステップをコンピュータに実行させるプログラム。
<1> a first load applied by the leg to the ground in the mid stance, a second load applied by the leg to the ground in the terminal stance, and measured by a load measuring device for a certain step during the user's walking motion; Correction coefficient calculation means for calculating a correction coefficient using each measured value of the third load applied by the stance leg to the ground in pressing;
Correction means for correcting the measurement value of the load measuring device using the correction coefficient;
An information processing apparatus.
<2> The correction coefficient calculating means calculates the estimated weight of the user using the first load, the second load, and the third load, and calculates the true value of the user's weight and the estimated value. A ratio with the weight obtained is calculated as the correction coefficient,
The information processing apparatus according to <1>.
<3> The correction coefficient calculation means calculates the first correction coefficient for the first step during the user's walking motion, and the second correction coefficient for the second step during the user's walking motion. To calculate
The correction means corrects the measurement value of the load of the second step by using a ratio of the first correction coefficient and the second correction coefficient;
The information processing apparatus according to <1>.
<4> The correction coefficient calculation means includes:
The estimated weight of the user is calculated using the first load, the second load, and the third load measured for the first step, and the value is set as the first correction coefficient,
The estimated weight of the user is calculated using the first load, the second load, and the third load measured for the second step, and the value is set as the second correction coefficient,
A ratio between the true value of the user's weight and the first correction coefficient is calculated as a third correction coefficient;
The correction means further corrects the measured value of the second one-step load corrected using the ratio of the first correction coefficient and the second correction coefficient using the third correction coefficient. ,
The information processing apparatus according to <3>.
<5> The correction coefficient calculation means calculates the estimated weight of the user by adding the values obtained by multiplying the measured values of the loads and the predetermined coefficients corresponding to the loads, Used to calculate the correction factor,
The information processing apparatus according to any one of <1> to <4>.
<6> The correction coefficient calculation means is a fourth load applied by the stance leg to the ground in the first load, the second load, the third load, and a loading response measured by the load measuring device. , And the load applied by the stance leg to the ground in the terminal stance, and the correction coefficient is calculated using each measurement value of the fifth load which is a load at a timing different from the second load.
The information processing apparatus according to any one of <1> to <5>.
<7> Each load is measured at each timing determined relative to the length of the stance phase.
The information processing apparatus according to any one of <1> to <6>.
<8> The information processing apparatus according to any one of <1> to <7>, wherein the load measuring device is a foot pressure distribution sensor.
<9> a first load applied by the stance leg to the ground in the mid stance, a second load applied by the stance leg to the ground in the terminal stance, and measured by a load measuring device for a certain step during the walking motion of the user; A correction coefficient calculating step of calculating a correction coefficient using each measured value of the third load that the stance leg puts on the ground in pressing;
A correction step of correcting the measurement value of the load measuring device using the correction coefficient;
Correction method of measured value having
<10> The correction coefficient calculation step calculates an estimated weight of the user using the first load, the second load, and the third load, and calculates the true value of the user's weight and the estimated value. Calculating a ratio with body weight as the correction coefficient, correcting the measurement value of the load measuring device,
The measurement value correction method according to <9>.
<11> The correction coefficient calculating step calculates the first correction coefficient for the first step during the user's walking motion, and the second correction coefficient for the second step during the user's walking motion. To calculate
The correction step corrects the measurement value of the load of the second step by using a ratio between the first correction coefficient and the second correction coefficient.
The measurement value correction method according to <9>.
<12> The correction coefficient calculating step includes:
The estimated weight of the user is calculated using the first load, the second load, and the third load measured for the first step, and the value is set as the first correction coefficient,
The estimated weight of the user is calculated using the first load, the second load, and the third load measured for the second step, and the value is set as the second correction coefficient,
A ratio between the true value of the user's weight and the first correction coefficient is calculated as a third correction coefficient;
The correction step further corrects the measured value of the second one-step load corrected using the ratio between the first correction coefficient and the second correction coefficient using the third correction coefficient. ,
The measurement value correction method according to <11>.
<13> The correction coefficient calculation step calculates the estimated weight of the user by adding the values obtained by multiplying the measured values of the loads and the predetermined coefficients corresponding to the loads, Used to calculate the correction factor,
<9> to <12> The measurement value correction method according to any one of the above.
<14> In the correction coefficient calculation step, the first load, the second load, the third load, and a fourth load applied by the stance leg to the ground in the loading response, measured by the load measuring device. , And the load applied by the stance leg to the ground in the terminal stance, and the correction coefficient is calculated using each measurement value of the fifth load which is a load at a timing different from the second load.
<9> to <13> The measurement value correction method according to any one of the above.
<15> Each load is measured at each timing determined relative to the length of the stance phase.
<9> to <14> The measurement value correction method according to any one of the above.
<16> The load measuring device is a foot pressure distribution sensor.
<9> thru | or <15> The correction method of the measured value as described in any one.
<17> A program that causes a computer to execute each step in the method of correcting a measurement value according to any one of <9> to <16>.
10 負荷測定器
30、40、50、60 線
1000 計算機
1020 バス
1040 プロセッサ
1060 メモリ
1080 ストレージ
1100 入出力インタフェース
2000 情報処理装置
2020 補正係数算出部
2040 補正部
DESCRIPTION OF
Claims (10)
前記補正係数を用いて、前記負荷測定器の測定値を補正する補正手段と、
を有する情報処理装置。 In a mid stance, a first load on which the stance leg is applied to the ground, in a terminal stance, a second load on which the stance leg is applied to the ground, and in pressing, measured by a load measuring device for a certain step during the user's walking movement Correction coefficient calculation means for calculating a correction coefficient using each measured value of the third load applied by the stance leg to the ground;
Correction means for correcting the measurement value of the load measuring device using the correction coefficient;
An information processing apparatus.
前記補正手段は、第1の前記補正係数と第2の前記補正係数との比を用いて、前記第2の一歩の負荷の測定値を補正する、請求項1に記載の情報処理装置。 The correction coefficient calculation means calculates the first correction coefficient for the first step during the user's walking motion, and calculates the second correction coefficient for the second step during the user's walking motion. ,
The information processing apparatus according to claim 1, wherein the correction unit corrects the measurement value of the second one-step load using a ratio between the first correction coefficient and the second correction coefficient.
前記第1の一歩について測定された前記第1の負荷、前記第2の負荷、及び前記第3の負荷を用いてユーザの推定体重を算出し、その値を第1の前記補正係数とし、
前記第2の一歩について測定された前記第1の負荷、前記第2の負荷、及び前記第3の負荷を用いてユーザの推定体重を算出し、その値を第2の前記補正係数とし、
前記ユーザの体重の真値と第1の前記補正係数との比を第3の前記補正係数として算出し、
前記補正手段は、第1の前記補正係数と第2の前記補正係数との比を用いて補正された第2の一歩の負荷の測定値を、第3の前記補正係数を用いてさらに補正する、請求項3に記載の情報処理装置。 The correction coefficient calculation means includes
The estimated weight of the user is calculated using the first load, the second load, and the third load measured for the first step, and the value is set as the first correction coefficient,
The estimated weight of the user is calculated using the first load, the second load, and the third load measured for the second step, and the value is set as the second correction coefficient,
Calculating a ratio between the true value of the user's weight and the first correction coefficient as the third correction coefficient;
The correction means further corrects the measured value of the second one-step load corrected using the ratio of the first correction coefficient and the second correction coefficient using the third correction coefficient. The information processing apparatus according to claim 3.
前記補正係数に基づいて、前記負荷測定器の測定値を補正する補正ステップと、
を有する測定値の補正方法。 In a mid stance, a first load on which the stance leg is applied to the ground, in a terminal stance, a second load on which the stance leg is applied to the ground, and in pressing, measured by a load measuring device for a certain step during the user's walking movement A correction coefficient calculating step for calculating a correction coefficient using each measured value of the third load applied by the stance leg to the ground;
A correction step of correcting the measurement value of the load measuring device based on the correction coefficient;
Correction method of measured value having
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015124797A JP6503239B2 (en) | 2015-06-22 | 2015-06-22 | INFORMATION PROCESSING APPARATUS, METHOD OF CORRECTING MEASURED VALUES, AND PROGRAM |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015124797A JP6503239B2 (en) | 2015-06-22 | 2015-06-22 | INFORMATION PROCESSING APPARATUS, METHOD OF CORRECTING MEASURED VALUES, AND PROGRAM |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017009432A true JP2017009432A (en) | 2017-01-12 |
| JP6503239B2 JP6503239B2 (en) | 2019-04-17 |
Family
ID=57761394
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015124797A Active JP6503239B2 (en) | 2015-06-22 | 2015-06-22 | INFORMATION PROCESSING APPARATUS, METHOD OF CORRECTING MEASURED VALUES, AND PROGRAM |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6503239B2 (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111473851A (en) * | 2020-05-12 | 2020-07-31 | 上海电机学院 | Weighing scale system |
| WO2020240752A1 (en) * | 2019-05-29 | 2020-12-03 | 日本電気株式会社 | Information processing device, body weight estimation device, body weight estimation system, information processing method, and storage medium |
Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS57166143A (en) * | 1981-04-08 | 1982-10-13 | Oki Electric Ind Co Ltd | Apparatus for analyzing walking capacity |
| JPH03206923A (en) * | 1990-01-08 | 1991-09-10 | Kubota Corp | Method and apparatus for measurement |
| JPH09257556A (en) * | 1996-03-22 | 1997-10-03 | Kazuo Yoshida | Measuring device |
| JPH1026579A (en) * | 1996-07-11 | 1998-01-27 | Asics Corp | Evaluation method for shock buffering property of shoes |
| JP2008139179A (en) * | 2006-12-04 | 2008-06-19 | Hitachi Ltd | Device for measuring body weight, and method for measuring body weight |
| US20100211355A1 (en) * | 2009-02-09 | 2010-08-19 | Horst Robert W | Foot pad device and method of obtaining weight data |
| US20130165820A1 (en) * | 2011-12-23 | 2013-06-27 | Industrial Technology Research Institute | System and method for estimating the mechanical behavior of human lower limbs |
| US20130204545A1 (en) * | 2009-12-17 | 2013-08-08 | James C. Solinsky | Systems and methods for sensing balanced-action for improving mammal work-track efficiency |
| WO2014137245A1 (en) * | 2013-03-05 | 2014-09-12 | Общество С Ограниченной Ответственностью "Хилби" | Method for determining an individual's weight and insole for the implementation thereof |
-
2015
- 2015-06-22 JP JP2015124797A patent/JP6503239B2/en active Active
Patent Citations (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS57166143A (en) * | 1981-04-08 | 1982-10-13 | Oki Electric Ind Co Ltd | Apparatus for analyzing walking capacity |
| JPH03206923A (en) * | 1990-01-08 | 1991-09-10 | Kubota Corp | Method and apparatus for measurement |
| JPH09257556A (en) * | 1996-03-22 | 1997-10-03 | Kazuo Yoshida | Measuring device |
| JPH1026579A (en) * | 1996-07-11 | 1998-01-27 | Asics Corp | Evaluation method for shock buffering property of shoes |
| JP2008139179A (en) * | 2006-12-04 | 2008-06-19 | Hitachi Ltd | Device for measuring body weight, and method for measuring body weight |
| US20100211355A1 (en) * | 2009-02-09 | 2010-08-19 | Horst Robert W | Foot pad device and method of obtaining weight data |
| US20130204545A1 (en) * | 2009-12-17 | 2013-08-08 | James C. Solinsky | Systems and methods for sensing balanced-action for improving mammal work-track efficiency |
| US20130165820A1 (en) * | 2011-12-23 | 2013-06-27 | Industrial Technology Research Institute | System and method for estimating the mechanical behavior of human lower limbs |
| WO2014137245A1 (en) * | 2013-03-05 | 2014-09-12 | Общество С Ограниченной Ответственностью "Хилби" | Method for determining an individual's weight and insole for the implementation thereof |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020240752A1 (en) * | 2019-05-29 | 2020-12-03 | 日本電気株式会社 | Information processing device, body weight estimation device, body weight estimation system, information processing method, and storage medium |
| JPWO2020240752A1 (en) * | 2019-05-29 | 2021-12-16 | 日本電気株式会社 | Information processing device, weight estimation device, weight estimation system, information processing method and storage medium |
| JP7127738B2 (en) | 2019-05-29 | 2022-08-30 | 日本電気株式会社 | Information processing device, weight estimation device, weight estimation system, information processing method, and storage medium |
| CN111473851A (en) * | 2020-05-12 | 2020-07-31 | 上海电机学院 | Weighing scale system |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6503239B2 (en) | 2019-04-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Schulz et al. | REDFIT: estimating red-noise spectra directly from unevenly spaced paleoclimatic time series | |
| US10679757B2 (en) | Method and apparatus for establishing a blood pressure model and method and apparatus for determining a blood pressure | |
| JP2014514080A5 (en) | ||
| RU2013150592A (en) | METHOD AND DEVICE FOR STRESS MEASUREMENT | |
| EP3367209A2 (en) | Method and apparatus for surface and ambient temperature estimation for portable devices | |
| JP2007121289A (en) | Duty cycle measuring instrument, and on-chip system and method (duty cycle measuring instrument and method) | |
| CN110617916B (en) | Calibration method and device of air pressure sensor | |
| CN105107134A (en) | Motion recording method and device | |
| JP2017009432A (en) | Information processing device, method for correcting measurement value, and program | |
| Humeau-Heurtier | Multivariate refined composite multiscale entropy analysis | |
| US11275005B2 (en) | Fatigue limit stress specification system, fatigue limit stress specification device, and fatigue limit stress specification method | |
| US11144149B2 (en) | Methods and techniques for correcting pressure sensor data in the presence of abnormal pressure sensor readings | |
| JP3626460B2 (en) | Two-dimensional stress field measurement system and two-dimensional stress field measurement program | |
| JP7084557B2 (en) | Assessment of muscle fatigue | |
| JP7239005B2 (en) | CONTRAST SENSITIVITY MEASUREMENT DEVICE, CONTRAST SENSITIVITY MEASUREMENT METHOD, AND PROGRAM | |
| Ramos et al. | Implementation of sine-fitting algorithms in systems with 32-bit floating point representation | |
| US9554753B2 (en) | Electrocardiogram (ECG) sensor and method of operating the same | |
| KR102053169B1 (en) | Test apparatus for quality of distribution transformer and computer-readable storage medium | |
| KR20180023598A (en) | Apparatus, system and method for analizing tension of high strength bolt | |
| JP6834180B2 (en) | Step number learning method, step number learning program, information processing device, walking data processing method, walking data processing program and walking data processing device | |
| CN113701923A (en) | Method, device, terminal and medium for acquiring characteristic curve | |
| WO2020065991A1 (en) | Information processing device, sensor operation optimization method, and program | |
| CN111380616A (en) | Separated temperature measuring module | |
| KR102024389B1 (en) | Apparatus and method for measuring operating deflection shape of a structure | |
| CN114089350A (en) | Distance measurement correction coefficient training method and device, distance measurement method and electrical tool |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180306 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181211 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20181225 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190207 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190312 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190325 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6503239 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |