JP2017002740A - Control device for variable displacement oil pump - Google Patents
Control device for variable displacement oil pump Download PDFInfo
- Publication number
- JP2017002740A JP2017002740A JP2015114673A JP2015114673A JP2017002740A JP 2017002740 A JP2017002740 A JP 2017002740A JP 2015114673 A JP2015114673 A JP 2015114673A JP 2015114673 A JP2015114673 A JP 2015114673A JP 2017002740 A JP2017002740 A JP 2017002740A
- Authority
- JP
- Japan
- Prior art keywords
- coefficient
- discharge
- value
- determination information
- engine speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000006073 displacement reaction Methods 0.000 title claims abstract description 31
- 239000003921 oil Substances 0.000 claims description 102
- 239000010720 hydraulic oil Substances 0.000 claims description 59
- 238000004364 calculation method Methods 0.000 claims description 19
- 238000005259 measurement Methods 0.000 claims description 16
- 239000000446 fuel Substances 0.000 abstract description 6
- 238000000034 method Methods 0.000 description 143
- 230000008569 process Effects 0.000 description 143
- 230000008859 change Effects 0.000 description 21
- 230000007246 mechanism Effects 0.000 description 20
- 238000012545 processing Methods 0.000 description 20
- 238000005461 lubrication Methods 0.000 description 15
- 230000004048 modification Effects 0.000 description 15
- 238000012986 modification Methods 0.000 description 15
- 230000004308 accommodation Effects 0.000 description 5
- 230000007423 decrease Effects 0.000 description 5
- 238000010586 diagram Methods 0.000 description 5
- 239000012530 fluid Substances 0.000 description 4
- 230000002093 peripheral effect Effects 0.000 description 4
- 230000007704 transition Effects 0.000 description 4
- 238000012937 correction Methods 0.000 description 3
- 230000006870 function Effects 0.000 description 3
- 230000004044 response Effects 0.000 description 3
- 230000009471 action Effects 0.000 description 2
- 230000006399 behavior Effects 0.000 description 2
- 230000005540 biological transmission Effects 0.000 description 2
- 238000001514 detection method Methods 0.000 description 2
- 230000001105 regulatory effect Effects 0.000 description 2
- 238000011144 upstream manufacturing Methods 0.000 description 2
- 230000006835 compression Effects 0.000 description 1
- 238000007906 compression Methods 0.000 description 1
- 230000001276 controlling effect Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000009795 derivation Methods 0.000 description 1
- 238000011038 discontinuous diafiltration by volume reduction Methods 0.000 description 1
- 239000006185 dispersion Substances 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000012447 hatching Effects 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 239000010687 lubricating oil Substances 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 239000012466 permeate Substances 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
- 230000006641 stabilisation Effects 0.000 description 1
- 238000011105 stabilization Methods 0.000 description 1
Images












Landscapes
- Rotary Pumps (AREA)
- Details And Applications Of Rotary Liquid Pumps (AREA)
Abstract
【課題】半吐出状態と全吐出状態を切り換える閾値を適正に設定し、燃費改善を図る。
【解決手段】可変容量オイルポンプの制御装置は、半吐出状態と全吐出状態とを切り換える閾値をエンジン回転数に応じて特定するための判定情報が記憶された記憶部と、エンジン回転数、および、エンジン回転数における吐出出力の実測値に基づいて、記憶部に記憶された判定情報を更新する判定情報更新部と、記憶部に記憶されている判定情報、および、エンジン回転数に基づいて、閾値を特定するとともに、吐出出力の要求値が、特定した閾値以上であるか否かによって、半吐出状態と全吐出状態とを切り換える出力切換部と、を備える。
【選択図】図9To improve fuel efficiency by appropriately setting a threshold value for switching between a half discharge state and a full discharge state.
A control device for a variable displacement oil pump includes a storage unit storing determination information for specifying a threshold value for switching between a half-discharge state and a full-discharge state according to an engine speed, an engine speed, and Based on the measured value of the discharge output at the engine speed, based on the determination information update unit that updates the determination information stored in the storage unit, the determination information stored in the storage unit, and the engine speed, An output switching unit that specifies a threshold value and switches between a half-discharge state and a full-discharge state depending on whether or not a required discharge output value is equal to or greater than the specified threshold value.
[Selection] Figure 9
Description
本発明は、主に車両に搭載される可変容量オイルポンプの制御装置に関する。 The present invention mainly relates to a control device for a variable displacement oil pump mounted on a vehicle.
従来、例えば特許文献1に示されるオイルポンプが知られている。このオイルポンプは、所謂内接歯車ポンプであって、外周面に歯が設けられたインナーロータと、内周面に歯が設けられたアウターロータとの噛み合わせによって、インナーロータとアウターロータとの隙間に流入した作動油を圧縮して送出する。 Conventionally, for example, an oil pump disclosed in Patent Document 1 is known. This oil pump is a so-called internal gear pump, in which an inner rotor having teeth on the outer peripheral surface and an outer rotor having teeth on the inner peripheral surface are engaged with each other to engage the inner rotor and the outer rotor. The hydraulic oil that has flowed into the gap is compressed and sent out.
また、特許文献1に記載のオイルポンプは所謂可変容量型であって、吐出流量を制御するべく、吐出ポートが2つ設けられている。そして、片方の吐出ポートから吐出した作動油のみを、油圧機構などの油圧供給対象に供給する半吐出状態と、両方の吐出ポートから吐出した作動油を油圧供給対象に供給する全吐出状態を切り換える機構が設けられる。半吐出状態と全吐出状態は、作動油の吐出出力(吐出流量や吐出油圧)の要求値に応じて切り換えられる。 The oil pump described in Patent Document 1 is a so-called variable displacement type, and two discharge ports are provided to control the discharge flow rate. Then, a half-discharge state in which only hydraulic oil discharged from one discharge port is supplied to a hydraulic supply target such as a hydraulic mechanism, and a full discharge state in which hydraulic oil discharged from both discharge ports is supplied to the hydraulic supply target are switched. A mechanism is provided. The half-discharge state and the full-discharge state are switched according to the required value of the hydraulic oil discharge output (discharge flow rate and discharge hydraulic pressure).
オイルポンプは、エンジンの回転動力によって駆動することから、オイルポンプの吐出出力は、エンジン回転数に応じた値となる。そこで、エンジン回転数に対して、半吐出状態で吐出可能な吐出可能出力を、吐出出力の要求値が超えると、全吐出状態となるようにオイルポンプが制御される。このとき、半吐出状態と全吐出状態を切り換える吐出出力の閾値は、本来設定されるべき適正値に対し、オイルポンプ個々の部品におけるバラつきなどの影響を受けてブレ幅がある。 Since the oil pump is driven by the rotational power of the engine, the discharge output of the oil pump becomes a value corresponding to the engine speed. In view of this, the oil pump is controlled such that when the required discharge output exceeds the dischargeable output that can be discharged in the half discharge state with respect to the engine speed, the discharge state is fully discharged. At this time, the threshold value of the discharge output for switching between the half-discharge state and the full-discharge state has a fluctuation width with respect to an appropriate value to be originally set due to the influence of variations in individual parts of the oil pump.
そのため、適正値のブレ幅のうち下限側を閾値として設定することで、全吐出状態への切り換えがどの個体でも確実に遂行されるようにする必要があった。その結果、半吐出状態での吐出性能が高く、閾値のブレ幅のうち上限側に適正値があるようなオイルポンプであっても、適正値よりも低い閾値が設定されることとなる。すなわち、本来、半吐出状態で賄うことの可能な吐出出力の要求値を、全吐出状態に切り換えて対応することとなり、燃費の改善の余地があった。 For this reason, it is necessary to ensure that any individual can be switched to the full discharge state by setting the lower limit side of the fluctuation width of the appropriate value as a threshold value. As a result, even if the oil pump has high discharge performance in the half discharge state and has an appropriate value on the upper limit side of the threshold fluctuation width, a threshold value lower than the appropriate value is set. In other words, the required value of the discharge output that can be covered in the half discharge state is switched to the full discharge state, and there is room for improvement in fuel consumption.
そこで、本発明は、半吐出状態と全吐出状態を切り換える閾値を適正に設定し、燃費改善を図ることができる可変容量オイルポンプの制御装置を提供することを目的とする。 Therefore, an object of the present invention is to provide a control device for a variable displacement oil pump that can appropriately set a threshold value for switching between a half-discharge state and a full-discharge state and can improve fuel consumption.
上記課題を解決するために、本発明の可変容量オイルポンプの制御装置は、2つの吐出ポートを有し、2つの吐出ポートの一方から他方よりも高圧で作動油を吐出する半吐出状態と、2つの吐出ポートの双方から作動油を吐出し、半吐出状態よりもエンジン回転数に対応する吐出可能出力が大きい全吐出状態を切り換え可能であって、半吐出状態と全吐出状態とを切り換える閾値をエンジン回転数に応じて特定するための判定情報が記憶された記憶部と、エンジン回転数、および、エンジン回転数における吐出出力の実測値に基づいて、記憶部に記憶された判定情報を更新する判定情報更新部と、記憶部に記憶されている判定情報、および、エンジン回転数に基づいて、閾値を特定するとともに、吐出出力の要求値が、特定した閾値以上であるか否かによって、半吐出状態と全吐出状態とを切り換える出力切換部と、を備えることを特徴とする。 In order to solve the above-described problem, the control device for a variable displacement oil pump according to the present invention has two discharge ports, a semi-discharge state in which hydraulic oil is discharged from one of the two discharge ports at a pressure higher than the other, Threshold for switching between the semi-discharge state and the full-discharge state, in which hydraulic oil is discharged from both of the two discharge ports, and the full-discharge state corresponding to the engine speed is larger than that in the half-discharge state. The determination information stored in the storage unit is updated based on the storage unit that stores determination information for specifying the engine speed according to the engine speed, and the measured value of the engine output and the discharge output at the engine speed. The threshold value is specified based on the determination information update unit that performs the determination information stored in the storage unit, and the engine speed, and the required value of the discharge output is equal to or greater than the specified threshold value Depending on whether, characterized in that it comprises an output switching unit for switching between the semi-discharge state and full discharge condition, the.
判定情報更新部は、半吐出状態において、吐出出力の目標値を、吐出出力の要求値よりも高く設定することで、吐出可能出力を測定して実測値を取得してもよい。 The determination information update unit may measure the dischargeable output and obtain the actual measurement value by setting the target value of the discharge output higher than the required value of the discharge output in the half discharge state.
判定情報は、少なくともエンジン回転数に所定の係数を乗算する式を含む計算式であって、判定情報更新部は、記憶部に記憶されている計算式の係数である記憶係数を更新してもよい。 The determination information is a calculation formula including at least an equation for multiplying the engine speed by a predetermined coefficient, and the determination information update unit may update a storage coefficient that is a coefficient of the calculation formula stored in the storage unit. Good.
判定情報更新部は、エンジン回転数、および、エンジン回転数における吐出出力の実測値に基づいて仮係数を導出し、導出した仮係数と記憶係数との比較結果に基づいて、記憶係数を更新してもよい。 The determination information updating unit derives a temporary coefficient based on the engine speed and the actual measured value of the discharge output at the engine speed, and updates the storage coefficient based on the comparison result between the derived temporary coefficient and the stored coefficient. May be.
判定情報更新部は、記憶係数と、仮係数との差分が、所定の変動誤差範囲外となると、記憶係数を更新してもよい。 The determination information updating unit may update the storage coefficient when the difference between the storage coefficient and the provisional coefficient is outside a predetermined fluctuation error range.
判定情報更新部は、仮係数が記憶係数よりも大きい場合、記憶係数として仮係数を記憶してもよい。 The determination information update unit may store the temporary coefficient as the storage coefficient when the temporary coefficient is larger than the storage coefficient.
判定情報更新部は、仮係数が記憶係数よりも大きい場合、記憶部に記憶されている記憶係数を、記憶係数に所定の加算値を加算した値に更新してもよい。 When the provisional coefficient is larger than the storage coefficient, the determination information update unit may update the storage coefficient stored in the storage unit to a value obtained by adding a predetermined addition value to the storage coefficient.
判定情報更新部は、仮係数が記憶係数よりも小さい場合、加算値よりも大きな所定の減算値を、記憶部に記憶されている記憶係数から減算した値に更新してもよい。 When the provisional coefficient is smaller than the storage coefficient, the determination information update unit may update a predetermined subtraction value larger than the addition value to a value obtained by subtracting from the storage coefficient stored in the storage unit.
判定情報更新部は、仮係数が記憶係数よりも小さい場合、記憶係数として仮係数を記憶してもよい。 The determination information update unit may store the temporary coefficient as the storage coefficient when the temporary coefficient is smaller than the storage coefficient.
判定情報は、予め設定された複数の油温領域毎に設定されてもよい。 The determination information may be set for each of a plurality of preset oil temperature regions.
本発明によれば、半吐出状態と全吐出状態を切り換える閾値を適正に設定し、燃費改善を図ることができる。 According to the present invention, it is possible to appropriately set the threshold value for switching between the half discharge state and the full discharge state, and to improve fuel consumption.
以下に添付図面を参照しながら、本発明の好適な実施形態について詳細に説明する。かかる実施形態に示す寸法、材料、その他具体的な数値等は、発明の理解を容易にするための例示に過ぎず、特に断る場合を除き、本発明を限定するものではない。なお、本明細書および図面において、実質的に同一の機能、構成を有する要素については、同一の符号を付することにより重複説明を省略し、また本発明に直接関係のない要素は図示を省略する。 Hereinafter, preferred embodiments of the present invention will be described in detail with reference to the accompanying drawings. The dimensions, materials, and other specific numerical values shown in the embodiments are merely examples for facilitating understanding of the invention, and do not limit the present invention unless otherwise specified. In the present specification and drawings, elements having substantially the same function and configuration are denoted by the same reference numerals, and redundant description is omitted, and elements not directly related to the present invention are not illustrated. To do.
図1は、可変容量オイルポンプ1を構成するハウジング2、回転体3、カバー4の分解斜視図である。図1に示す可変容量オイルポンプ1は、所謂内接歯車ポンプであって、ハウジング2およびカバー4で形成されるケーシング5内に、回転体3が収容される。
FIG. 1 is an exploded perspective view of a
ハウジング2およびカバー4は、回転体3を収容し、ハウジング2の対向面2aとカバー4の対向面4aが当接した状態で、不図示の締結部材で締結される。
The
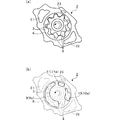
図2は、ハウジング2、回転体3、カバー4の正面図であり、図2(a)には、ハウジング2の対向面2a側を示し、図2(b)には、回転体3のうち、カバー4との対向面側を示し、図2(c)には、カバー4の対向面4a側を示す。
2 is a front view of the
図2(a)に示すように、ハウジング2の対向面2aには、回転体3が収容される収容穴6が設けられている。この収容穴6は、ハウジング2の対向面2aから回転体3の回転軸方向に窪む断面円形の穴で構成されており、カバー4で閉塞された状態で、収容穴6の内部が油圧室7となる。
As shown in FIG. 2A, a
回転体3は、油圧室7内に回転自在に収容され、エンジンの回転動力などを受けて回転する。図2(b)に示すように、回転体3は、外周面に複数の外歯3aが設けられたインナーロータ3bと、内周面に複数の内歯3cが設けられたアウターロータ3dで構成される。インナーロータ3bとアウターロータ3dとの複数の隙間がポンプ室8となっており、回転体3は、油圧室7を回転方向(図2(b)中、反時計回り方向)に区画してポンプ室8を形成している。
The rotating
インナーロータ3bは、エンジンの動力で回転する不図示のシャフトが中心に挿通され、シャフトと一体回転する。外歯3aは、内歯3cよりも歯の数が1つ少なく、インナーロータ3bとアウターロータ3dとは、互いに偏心した状態で噛合されている。インナーロータ3bが図2(b)中、実線の矢印方向に回転すると、アウターロータ3dも一体となって回転するが、このとき、複数のポンプ室8が、順次、縮小と拡大を繰り返すこととなる。
The
そして、ハウジング2に形成される収容穴6の底面6aには、ハウジング側吸入ポート9a、ハウジング側第1吐出ポート10a(吐出ポート)、ハウジング側第2吐出ポート11a(吐出ポート)が設けられている。ハウジング2に形成されるハウジング側吸入ポート9a、ハウジング側第1吐出ポート10a、ハウジング側第2吐出ポート11aは、いずれも底面6aに設けられる窪みで構成され、回転体3の回転方向(図2(a)に破線の矢印で示す)に互いに間隔を維持して、ハウジング側吸入ポート9a、ハウジング側第1吐出ポート10a、ハウジング側第2吐出ポート11aの順に配されている。
A housing
また、カバー4の対向面4aのうち、収容穴6に対向する対向部分4bには、カバー側吸入ポート9b、カバー側第1吐出ポート10b(吐出ポート)、カバー側第2吐出ポート11b(吐出ポート)が設けられている。カバー4に形成されるカバー側吸入ポート9b、カバー側第1吐出ポート10b、カバー側第2吐出ポート11bは、いずれもカバー4を貫通する貫通孔で構成され、回転体3の回転方向(図2(c)に破線の矢印で示す)に互いに間隔を維持して、カバー側吸入ポート9b、カバー側第1吐出ポート10b、カバー側第2吐出ポート11bの順に配されている。
Further, of the facing
なお、ハウジング側吸入ポート9a、カバー側吸入ポート9bは、回転体3の回転軸方向に対向する位置に形成され、ハウジング側第1吐出ポート10a、カバー側第1吐出ポート10b、および、ハウジング側第2吐出ポート11a、カバー側第2吐出ポート11bも、それぞれ回転体3の回転軸方向に対向配置されている。以下では、ハウジング側吸入ポート9a、カバー側吸入ポート9bを総称して吸入ポート9と呼び、ハウジング側第1吐出ポート10a、カバー側第1吐出ポート10bを総称して第1吐出ポート10と呼び、ハウジング側第2吐出ポート11a、カバー側第2吐出ポート11bを総称して第2吐出ポート11と呼ぶ場合がある。
The housing-
図3(a)は、収容穴6に回転体3を収容したハウジング2の正面図であり、図3(b)は、回転体3を透過させて吸入ポート9、第1吐出ポート10、第2吐出ポート11を一体に示したハウジング2の正面図である。吸入ポート9は、油圧室7のうち、回転体3の回転に伴ってポンプ室8が容積を拡大する範囲に開口しており、容積拡大による負圧作用でポンプ室8に作動油を導く。第1吐出ポート10および第2吐出ポート11は、吸入ポート9よりも回転体3の回転方向(図3に実線の矢印で示す)後方であって、回転体3の回転に伴ってポンプ室8が容積を縮小する範囲に開口しており、容積縮小による圧縮作用で圧縮されたポンプ室8内の作動油が吐出される。
3A is a front view of the
また、図2および図3に示すように、ハウジング2およびカバー4が組み付けられた状態において、回転体3が収容される収容穴6(油圧室7)の径方向外方には、吸入通路21、第1合流通路22、第2合流通路23が設けられている。吸入通路21は、ハウジング2の内部において、ハウジング側吸入ポート9aと連通している。同様に、第1合流通路22は、ハウジング2の内部において、ハウジング側第1吐出ポート10aと連通し、第2合流通路23は、ハウジング側第2吐出ポート11aと連通している。吸入通路21、第1合流通路22、第2合流通路23は、ハウジング2およびカバー4が組み付けられた状態において、回転体3の回転軸方向に延在する。そして、吸入通路21、第1合流通路22、第2合流通路23は、いずれもハウジング2側の一端が閉塞されているのに対して、カバー4側の端部は、カバー4を貫通している。
2 and 3, when the
つまり、ハウジング2には、吸入通路21、第1合流通路22、第2合流通路23を構成する窪みが形成されており、カバー4には、ハウジング2に形成された窪みと対向する位置に、吸入通路21、第1合流通路22、第2合流通路23を構成する貫通孔が形成されている。したがって、ハウジング2内において、ハウジング側第1吐出ポート10aから吐出された作動油は、第1合流通路22を介してカバー4側へ導かれ、ハウジング2内において、ハウジング側第2吐出ポート11aから吐出された作動油は、第2合流通路23を介してカバー4側へ導かれる。
That is, the
詳しい説明は省略するが、カバー4のうち対向面4aと反対側の面は、エンジン本体に固定される。このエンジン本体には、カバー4に形成されたカバー側吸入ポート9b、カバー側第1吐出ポート10b、カバー側第2吐出ポート11bそれぞれに接続される流路(後述する吸入流路100、第1供給路110、第2供給路120)が形成されている。そして、カバー側吸入ポート9bに接続される吸入流路100は、吸入通路21にも接続される。また、カバー側第1吐出ポート10bに接続される第1供給路110は、第1合流通路22にも接続されており、カバー側第2吐出ポート11bに接続される第2供給路120は、第2合流通路23にも接続されている。
Although detailed description is omitted, the surface of the
したがって、吸入流路100を流通する作動油は、カバー側吸入ポート9bに導かれるとともに、吸入通路21を介してハウジング側吸入ポート9aにも導かれる。また、ハウジング側第1吐出ポート10aから吐出された作動油は、第1合流通路22を介してカバー4側へ導かれた後に、カバー側第1吐出ポート10bから吐出された作動油と合流して、作動油の供給先(後述する油圧機構130および潤滑対象132)に供給されることとなる。同様に、ハウジング側第2吐出ポート11aから吐出された作動油は、第2合流通路23を介してカバー4側へ導かれた後に、カバー側第2吐出ポート11bから吐出された作動油と合流して、供給先に供給されることとなる。
Accordingly, the hydraulic fluid flowing through the
このように、第1吐出ポート10および第2吐出ポート11の双方から作動油が吐出される可変容量オイルポンプ1は、供給先で要求される吐出出力(吐出流量および吐出圧力)の要求値に応じて、半吐出状態と全吐出状態とに運転状態を切り換えて用いられる。具体的には、供給先の吐出出力の要求値が予め設定された閾値よりも低い場合には、運転状態を半吐出状態に切り換え、第1吐出ポート10から吐出される作動油のみを供給先に供給する。そして、第2吐出ポート11から吐出される作動油は、潤滑油として各部位に供給したり、タンクに環流したりする。一方、供給先の要求圧力が閾値以上の場合には、運転状態を全吐出状態に切り換え、第1吐出ポート10から吐出される作動油に、第2吐出ポート11から吐出される作動油を合流させて供給先に供給する。このように、半吐出状態および全吐出状態のいずれかに運転状態を切り換えることにより、エネルギーロスを低減することができる。
As described above, the variable capacity oil pump 1 from which the hydraulic oil is discharged from both the
図4、図5は、可変容量オイルポンプ1の作動油回路を説明するための図であり、図4には、全吐出状態における可変容量オイルポンプ1の作動油回路を示し、図5には、半吐出状態における可変容量オイルポンプ1の作動油回路を示す。図4、図5中、高圧で油圧機構130に向かう作動油の流路を太線の矢印で示す。
4 and 5 are diagrams for explaining the hydraulic oil circuit of the variable displacement oil pump 1. FIG. 4 shows the hydraulic oil circuit of the variable displacement oil pump 1 in the full discharge state, and FIG. The hydraulic oil circuit of the variable capacity oil pump 1 in a semi-discharge state is shown. In FIG. 4 and FIG. 5, the flow path of hydraulic oil toward the
図4に示すように、可変容量オイルポンプ1から吐出された作動油は、トランスミッションの油圧機構130、および、潤滑対象132に供給される。油圧機構130は、供給された作動油の油圧(ライン圧)で各種の部品を作動させ、こうした部品の作動により変速などを行う。また、潤滑対象132は、トランスミッション内の各部品の潤滑部分であり、潤滑対象132においては、供給された作動油が潤滑油として機能する。潤滑対象132に作動油を供給する油圧は、油圧機構130に供給される作動油の油圧よりも低くてもよい。
As shown in FIG. 4, the hydraulic oil discharged from the variable displacement oil pump 1 is supplied to the transmission
第1供給路110は、第1吐出ポート10と油圧機構130とを接続しており、第1吐出ポート10から吐出された作動油を油圧機構130に導く。
The
また、第1供給路110から分岐する第1分岐路112が形成されており、第1供給路110から第1分岐路112に流入した作動油は、潤滑対象132に繋がる第2供給路120に流入し、一部が潤滑対象132に導かれる。一方、第2供給路120は、タンクTに接続される第2分岐路122に分岐しており、第2供給路120から第2分岐路122に流入した作動油は、タンクTに環流する。タンクTは、ストレーナ134を介して、吸入ポート9に連通する吸入流路100と接続されており、ストレーナ134でろ過された作動油が、吸入流路100および吸入ポート9を介して油圧室7のポンプ室8に導かれる。
In addition, a
第1分岐路112には、コントロール弁136が設けられる。第1分岐路112は、第1供給路110と、第2供給路120のうち第2分岐路122との分岐部分よりも上流側とを接続する。第1供給路110に対し第2供給路120の圧力は低く、作動油は、第1分岐路112を第1供給路110側から第2供給路120側に向かって流れる。
A
コントロール弁136は、パイロットライン140の油圧(パイロット圧)に応じて開度を変更する。リニアソレノイド142は、例えば、電磁石などで構成され、電流値に応じてパイロット圧を可変制御する。
The
コントロール弁136によって第1分岐路112の流路幅が狭くなると、第1供給路110から第1分岐路112に流入する作動油の流量が減り、第1供給路110における油圧が上昇し、油圧機構130に作用する油圧が高まる。逆に、コントロール弁136によって第1分岐路112の流路幅が広くなると、第1供給路110から第1分岐路112に流入する作動油の流量が増え、第1供給路110における油圧が低下し、油圧機構130に作用する油圧が低くなる。
When the flow path width of the
すなわち、コントロール弁136は、第1供給路110に吐出された作動油を調圧して油圧機構130に供給し、余剰の作動油を、第1分岐路112を介して第2供給路120に導いている。
That is, the
また、第2分岐路122には、圧力調整弁138が設けられる。圧力調整弁138は、第2供給路120側の圧力を一定圧力に維持する。そして、第2供給路120のうち、第2分岐路122と潤滑対象132との間には、潤滑対象132への供給圧を一定に保持するためのオリフィス144が設けられている。こうして、圧力調整弁138によって、第2供給路120の圧力が一定に保たれるとともに、オリフィス144を介して潤滑対象132へ作動油が供給され、余剰の作動油がタンクTに環流する。
Further, a
合流油路126は、第1供給路110のうち、第1分岐路112との接続部分よりも上流側に接続されている。また、ポート切換弁146は、第2供給路120に配されており、第2吐出ポート11から吐出された作動油を、合流油路126を介して第1供給路110に導く第1切換位置と、第2吐出ポート11から吐出された作動油を、第2供給路120を介して潤滑対象132に導く第2切換位置とに切り換え可能な2位置3ポート弁で構成されている。
The
ポート切換弁146は、図4では、第2吐出ポート11と合流油路126とを接続する第1切換位置となっており、図5では、第2吐出ポート11と第2供給路120とを接続する第2切換位置となっている。
In FIG. 4, the
また、図4に示すように、ポート切換弁146が第1切換位置にある全吐出状態において、合流油路126は、第2吐出ポート11と第1供給路110とを接続している。このとき、第2吐出ポート11から吐出された作動油は、第2供給路120、合流油路126、および、第1供給路110を介して油圧機構130に導かれる。
As shown in FIG. 4, the combined
一方、図5に示すように、半吐出状態においては、ポート切換弁146が第2切換位置にあり、第2吐出ポート11から吐出された作動油は、第2供給路120を介して潤滑対象132に導かれる。
On the other hand, as shown in FIG. 5, in the semi-discharge state, the
このように、第2吐出ポート11は、油圧機構130、および、潤滑対象132の少なくともいずれかと接続されることとなる。
As described above, the
制御装置148は、エンジン回転数センサ、油温センサ、スロットル開度センサ、車速センサ、T/M回転センサなどのセンサ150a、および、ライン圧センサ150bからの出力値に応じ、リニアソレノイド142を制御する。ここで、ライン圧は、油圧機構130へ供給される作動油の油圧を示し、ライン圧センサ150bは、第1供給路110のうち、第1分岐路112との接続部分よりも下流側に配置され、ライン圧を測定する。
The
詳細には、制御装置148は、センサ150aからの出力値に応じ、油圧機構130で要求される吐出出力の要求値(例えば、要求吐出圧)を導出し、導出された吐出出力の要求値に、ライン圧センサ150bからの出力値が収束するように、コントロール弁136の開度を(すなわち、リニアソレノイド142を)フィードバック制御する。
Specifically, the
また、制御装置148は、記憶部148aを備えるとともに、出力切換部148b、判定情報更新部148cとして機能する。記憶部148aには、半吐出状態と全吐出状態とを切り換える閾値をエンジン回転数に応じて特定するための判定情報が記憶される。判定情報については後に詳述する。
The
出力切換部148bは、吐出出力の要求値が、エンジン回転数に応じた閾値以上であるか否かによって、ポート切換弁146を制御して半吐出状態と全吐出状態とを切り換える。
The
図4に示す全吐出状態と、図5に示す半吐出状態を比較すると、全吐出状態の方が、第1吐出ポート10に加えて第2吐出ポート11から吐出された作動油が、油圧機構130に導かれることから、吐出出力(吐出流量および吐出油圧)が高まる。出力切換部148bは、例えば、エンジン負荷が高いときなどに油圧機構130が高い油圧を要するとき、すなわち、吐出出力の要求値が閾値以上であるとき、ポート切換弁146を制御して全吐出状態とすることで、吐出出力の要求値を満たすことが可能となる。
Comparing the full discharge state shown in FIG. 4 and the half discharge state shown in FIG. 5, in the full discharge state, the hydraulic oil discharged from the
また、出力切換部148bは、エンジン負荷が低い場合など、吐出出力の要求値が閾値未満であるとき、ポート切換弁146を制御して半吐出状態として、第2吐出ポート11から吐出される作動油を、潤滑対象132やタンクTに導く。このとき、第2吐出ポート11に連通する第2供給路120は、第1供給路110に比べて油圧が低いことから、全吐出状態に比べ、第2吐出ポート11に作用する油圧が低くなり、可変容量オイルポンプ1の駆動負荷が低減されることとなる。
Further, the
図6は、半吐出状態と全吐出状態を切り換える閾値と、エンジン回転数との関係を示す説明図である。可変容量オイルポンプ1は、エンジンの回転動力によって駆動することから、可変容量オイルポンプ1の吐出出力は、エンジン回転数に応じた値となる。すなわち、半吐出状態で吐出可能な吐出可能出力も、エンジン回転数に応じて定まることとなる。 FIG. 6 is an explanatory diagram showing the relationship between the threshold value for switching between the half-discharge state and the full-discharge state and the engine speed. Since the variable displacement oil pump 1 is driven by the rotational power of the engine, the discharge output of the variable displacement oil pump 1 has a value corresponding to the engine speed. That is, the dischargeable output that can be discharged in the half-discharge state is also determined according to the engine speed.
具体的には、半吐出状態で吐出可能な吐出可能出力が、エンジン回転数に大凡比例して変化する。そのため、半吐出状態と全吐出状態を切り換える閾値も、図6(a)に示すように、少なくともエンジン回転数が所定回転数以下において、エンジン回転数に比例した値が設定される(エンジン回転数に応じて設定される)。 Specifically, the dischargeable output that can be discharged in the semi-discharge state changes approximately in proportion to the engine speed. Therefore, as shown in FIG. 6A, the threshold value for switching between the half-discharge state and the full-discharge state is set to a value proportional to the engine speed at least when the engine speed is equal to or lower than the predetermined speed (engine speed). Set according to).
ここでは、半吐出状態と全吐出状態とを切り換える閾値をエンジン回転数に応じて特定するための判定情報として、少なくともエンジン回転数に所定の係数を乗算する式(計算)を含む計算式が記憶部148aに記憶されている。具体的には、判定情報は、エンジン回転数の比例式となっており、エンジン回転数の変数に、実際のエンジン回転数を代入すると、対応する閾値が導出される。
Here, a calculation formula including at least a formula (calculation) for multiplying the engine speed by a predetermined coefficient is stored as determination information for specifying the threshold value for switching between the half-discharge state and the full-discharge state according to the engine speed. Stored in the
出力切換部148bは、記憶部148aに記憶されている判定情報、および、エンジン回転数に基づいて、閾値を特定するとともに、吐出出力の要求値が、特定した閾値以上であるか否かによって、半吐出状態と全吐出状態とを切り換える。例えば、出力切換部148bは、図6(a)に示すように、エンジン回転数αのとき、吐出出力の要求値が閾値β以上であれば、全吐出状態、閾値β未満であれば半吐出状態となるように、ポート切換弁146を制御する。
The
また、油圧機構130のライン圧が高くなり過ぎると、油圧機構130側の油圧許容値を超えるおそれがあることから、吐出出力の要求値には上限値が設定されている。エンジン回転数が高速となると、吐出出力の要求値を半吐出状態で賄うことが可能となり、全吐出状態が選択されなくなる。
In addition, if the line pressure of the
ところで、可変容量オイルポンプ1の吐出出力は、エンジン回転数の他に作動油の油温の影響を受ける。そのため、図6(b)に示すように、油温を、低温領域、常温領域、高温領域の油温領域に区分し、判定情報を、それぞれの油温領域ごとに設定している。以下では、常温領域に対応して設定された閾値について詳述し、他の油温領域に対応して設定された閾値については、常温領域に対応して設定された閾値と実質的に等しいことから説明を省略する。 By the way, the discharge output of the variable displacement oil pump 1 is influenced by the oil temperature of the hydraulic oil in addition to the engine speed. Therefore, as shown in FIG. 6B, the oil temperature is divided into a low temperature region, a normal temperature region, and a high temperature region, and the determination information is set for each oil temperature region. In the following, the threshold values set for the normal temperature region will be described in detail, and the threshold values set for the other oil temperature regions are substantially equal to the threshold values set for the normal temperature region. The description will be omitted.
図7は、吐出性能のバラつきを説明するための説明図である。可変容量オイルポンプ1は、構成部品のバラつきなどの影響により、吐出性能にバラつきが生じる。その結果、図7(a)に示す凡例a〜dのように、同じエンジン回転数でも吐出可能出力に差が生じ、吐出出力の上限値までの比例部分において、傾きに差が生ずる。図7(a)の例では、凡例aが最も吐出性能が低く、他の凡例b〜dに比べ、同じエンジン回転数でも半吐出状態での吐出可能出力が低い。また、凡例dが最も吐出性能が高く、他の凡例a〜cに比べ、同じエンジン回転数でも半吐出状態での吐出可能出力が高い。 FIG. 7 is an explanatory diagram for explaining the variation in ejection performance. The variable displacement oil pump 1 has variations in discharge performance due to the influence of variations in components and the like. As a result, as in the legends a to d shown in FIG. 7A, a difference occurs in the dischargeable output even at the same engine speed, and a difference occurs in the slope in the proportional portion up to the upper limit value of the discharge output. In the example of FIG. 7A, the discharge performance of the legend a is the lowest, and the dischargeable output in the half discharge state is low even at the same engine speed as compared to the other legends b to d. Further, the legend d has the highest discharge performance, and the dischargeable output in the half discharge state is high even at the same engine speed as compared to the other legends a to c.
このように、吐出性能にバラつきがある場合、吐出性能が最も低いものに合わせて、計算式を設定する。すなわち、凡例aの吐出性能に合わせて、エンジン回転数に乗算する係数を設定することとなる。その結果、例えば、凡例dについては、図7(b)にハッチングで示す領域において、本来、半吐出状態で賄うことができた吐出出力の要求値に対し、全吐出状態で応じることとなってしまう。 Thus, when there is variation in the discharge performance, the calculation formula is set according to the one having the lowest discharge performance. That is, a coefficient for multiplying the engine speed is set in accordance with the discharge performance of the legend a. As a result, for example, for the legend d, in the area indicated by hatching in FIG. 7B, the required value of the discharge output that could originally be covered in the half discharge state is responded in the full discharge state. End up.
そこで、図4および図5に示す判定情報更新部148cは、エンジン回転数と、エンジン回転数における吐出出力の実測値に基づいて、記憶部148aに記憶されている判定情報を更新する。具体的に、判定情報更新部148cは、記憶部148aに記憶された判定情報である計算式のうち、エンジン回転数に乗算される係数(以下、記憶部148aに記憶されている係数を「記憶係数」と称す)を学習処理の対象とする。
Therefore, the determination
そして、判定情報更新部148cは、エンジン回転数、および、エンジン回転数における吐出出力の実測値に基づいて係数(以下、判定情報更新部148cによる学習処理で導出された係数を「仮係数」と称す)を導出し、導出した仮係数と、記憶係数との比較結果に基づいて、記憶係数を更新する。ここで、仮係数は、吐出出力の実測値をエンジン回転数で除算して導出される。
Then, the determination
例えば、図7(b)の凡例aの閾値となる計算式を学習処理によって補正する。出力切換部148bは、記憶部148aに記憶されている計算式、および、エンジン回転数に基づいて、閾値を特定する。そして、吐出出力の要求値が、特定した閾値以上であるか否かによって、半吐出状態と全吐出状態とを切り換える。学習処理によって、閾値とエンジン回転数の比例部分の傾きが補正されて凡例aから凡例bになれば、半吐出状態となる領域が拡大し、燃費改善が可能となる。
For example, the calculation formula that is the threshold value of the legend a in FIG. 7B is corrected by the learning process. The
また、吐出出力の測定は、外乱の影響が小さく、エンジン回転数のプロフィール(履歴)に再現性が高いエンジン始動時(ISS(アイドルストップシステム)復帰時を含む)、および、車両が大凡定速走行となっているときなど、エンジン回転数が安定するエンジン安定期間に遂行される。 In addition, the measurement of discharge output is less affected by disturbances, and the engine speed profile (history) is highly reproducible when the engine starts (including when the ISS (idle stop system) returns), and when the vehicle is at a roughly constant speed. This is performed during the engine stabilization period in which the engine speed is stable, such as when running.
図8は、エンジン始動時の学習処理を説明するための説明図である。図8(a)には、エンジン始動時におけるエンジン回転数の時間経過に伴う推移の一例を示し、図8(b)には、可変容量オイルポンプ1の吐出出力の時間経過に伴う推移の一例を示す。 FIG. 8 is an explanatory diagram for explaining a learning process when the engine is started. FIG. 8A shows an example of the transition of the engine speed with the passage of time when the engine is started, and FIG. 8B shows an example of the transition of the discharge capacity of the variable capacity oil pump 1 with the passage of time. Indicates.
判定情報更新部148cは、図8(a)に示すように、エンジン始動時、エンジン回転数が増加し始めてから減少に転じるまで、エンジン回転数を監視する(判定期間)。この判定期間において、判定情報更新部148cは、図8(b)に一点鎖線で示すように、吐出出力の要求値を、実際にセンサ150aの出力値から導出される要求値よりも大きな値(例えば、上限値)に設定する。
As shown in FIG. 8A, the determination
そして、制御装置148は、センサ150aからの出力値に応じ、設定した吐出出力の要求値に、ライン圧センサ150bからの出力値が収束するように、コントロール弁136の開度をフィードバック制御する。その結果、可変容量オイルポンプ1の吐出出力は、図8(b)に示すように、半吐出状態で吐出可能な吐出可能出力まで上昇した後、エンジン回転数の低下と共に、低下していく。
Then, the
判定情報更新部148cは、エンジン回転数がピークとなったとき(極大値となったとき)の吐出出力の実測値を取得する。このとき、エンジン回転数がピークとなる以前の吐出出力の実測値は、応答遅れの影響がある。そこで、エンジン回転数がピークとなったときの吐出出力の実測値を参照することで、応答遅れの影響を回避できる。また、判定期間の後、判定情報更新部148cは、吐出出力の要求値を、徐々に実際の(出力センサ150aの出力値に応じて導出した)要求値に収束させる。
The determination
図9は、エンジン安定期間の学習処理を説明するための説明図である。図9(a)には、車両走行時におけるエンジン回転数の時間経過に伴う推移の一例を示し、図9(b)には、可変容量オイルポンプ1の吐出出力の時間経過に伴う推移の一例を示す。 FIG. 9 is an explanatory diagram for explaining the learning process during the engine stable period. FIG. 9A shows an example of a transition with time of the engine speed during vehicle travel, and FIG. 9B shows an example of a transition of discharge output of the variable capacity oil pump 1 with time. Indicates.
判定情報更新部148cは、図9(a)に示すように、エンジンの駆動中、エンジン回転数が所定時間、連続して安定しているか(エンジン回転変化量が所定範囲か)否かを判定し続ける。ここで、エンジン回転変化量は、例えば、所定の測定単位時間におけるエンジン回転数の最大値と最小値の差分など、エンジン回転数の変化の大きさを示す。
As shown in FIG. 9A, the determination
エンジン回転数が所定時間連続して安定すると、判定情報更新部148cは、学習処理を遂行する学習期間に移行する。学習期間においては、判定情報更新部148cは、図9(b)に一点鎖線で示すように、吐出出力の要求値を、実際にセンサ150aの出力値から導出される要求値よりも大きな値(例えば、上限値)に設定する。制御装置148は、センサ150aからの出力値に応じ、設定した吐出出力の要求値に、ライン圧センサ150bからの出力値が収束するように、コントロール弁136の開度をフィードバック制御する。その結果、可変容量オイルポンプ1の吐出出力は、図9(b)に示すように、半吐出状態で吐出可能な吐出可能出力まで上昇する。
When the engine speed is stabilized for a predetermined time, the determination
判定情報更新部148cは、学習期間中の吐出可能出力の実測値を取得する。エンジン始動時には判定期間の最後の1サンプル分しか実測値が取得されないのに対し、学習期間においては、予め設定されたサンプリング周期で複数の実測値が取得可能となっている。
The determination
そして、エンジン回転数が安定しなくなるか(変化幅が所定範囲を超えると)、一定の時間が経過すると、学習期間が終了し、判定情報更新部148cは、吐出出力の要求値を、徐々に(段階的に)実際の(出力センサ150aの出力値に応じて導出した)要求値に収束させる。
When the engine speed becomes unstable (when the change width exceeds a predetermined range) or when a certain time has elapsed, the learning period ends, and the determination
こうして、判定情報更新部148cは、エンジン始動時やエンジン安定期間に取得した吐出出力の実測値を、その実測値を測定したときのエンジン回転数で除算して仮係数を導出し、記憶係数の学習処理を行う。以下、具体的な処理について、フローチャートを用いて詳述する。
In this way, the determination
(エンジン始動時学習処理)
図10は、エンジン始動時における学習処理の概略的な流れを示すフローチャートである。図10に示す処理は、エンジン始動時(ISS復帰時)、吐出出力の要求値が半吐出状態と全吐出状態を切り換える閾値未満のときに実行される。
(Learning process at engine start)
FIG. 10 is a flowchart showing a schematic flow of a learning process when the engine is started. The process shown in FIG. 10 is executed when the engine output is started (when the ISS is restored) and the discharge output request value is less than the threshold value for switching between the half-discharge state and the full-discharge state.
(始動判定処理S200)
判定情報更新部148cは、エンジン始動中、または、ISS復帰中であるか否かを判定する。その結果、エンジン始動中、または、ISS復帰中であると判定した場合は、吐出出力置換処理S202に処理を移す。エンジン始動中、および、ISS復帰中のいずれでもないと判定した場合は、吐出出力要求値計算処理S214に処理を移す。
(Startup determination process S200)
The determination
(吐出出力置換処理S202)
判定情報更新部148cは、吐出出力の要求値を、センサ150aの出力値から計算する代わりに、実際にセンサ150aの出力値から導出される要求値よりも大きな値に設定する。
(Discharge output replacement process S202)
The determination
(エンジン回転数判定処理S204)
判定情報更新部148cは、センサ150aの出力値に基づいて、エンジン回転数が第1所定値以下であるか否かを判定する。その結果、エンジン回転数が第1所定値以下である場合、ピーク検出判定処理S206に処理を移す。エンジン回転数が第1所定値より大きい場合、吐出出力要求値計算処理S214に処理を移す。エンジン回転数が大きすぎると、可変容量オイルポンプ1の吐出可能油圧が大きくなり過ぎて学習処理が遂行できなくなる。そこで、当該エンジン回転数判定処理S204によって、このような事態を回避する。
(Engine speed determination process S204)
The determination
(ピーク検出判定処理S206)
判定情報更新部148cは、センサ150aの出力値に基づいて、エンジン回転数がピークとなったか(極大値となったか)否かを判定する。すなわち、判定情報更新部148cは、エンジン回転数が増加し始めてから減少に転じたか否かを判定する。その結果、エンジン回転数がピークとなったと判定すると、油温領域特定処理S208に処理を移す。エンジン回転数がピークとなっていないと判定した場合は、始動判定処理S200に処理を戻す。
(Peak detection determination process S206)
Based on the output value of the
(油温領域特定処理S208)
判定情報更新部148cは、センサ150aの出力値に基づいて、作動油の油温が低温領域、常温領域、高温領域のいずれに属するかを判断する。このとき、作動油の油温が低温領域の下限値を下回る、または、高温領域の上限値を上回る、すなわち、低温領域、常温領域、高温領域のいずれにも該当しないと、学習処理の対象外となる。
(Oil temperature region specifying process S208)
The determination
(油温学習対象判定処理S210)
判定情報更新部148cは、作動油の油温が、学習処理の対象外であるか否かを判定する。その結果、作動油の油温が、学習処理の対象外であると判定した場合は、吐出出力要求値計算処理S214に処理を移す。このように、油温が極端に低温、または、高温の場合に、学習処理を行わないことで、油温の挙動が不安定な状態での実測値による誤学習を回避することができる。作動油の油温が、学習処理の対象外でないと判定した場合は、学習処理S212に処理を移す。
(Oil temperature learning target determination process S210)
The determination
(学習処理S212)
判定情報更新部148cは、特定された油温領域に対応する閾値について、学習処理を遂行する。当該学習処理S212については、後に詳述する。
(Learning process S212)
The determination
(吐出出力要求値計算処理S214)
判定情報更新部148cは、吐出出力の要求値を、センサ150aの出力値から導出した値に収束させる。
(Discharge output request value calculation process S214)
The determination
(エンジン安定期間学習処理)
図11は、エンジン安定期間における学習処理の概略的な流れを示すフローチャートである。図11に示す処理は、エンジンの駆動中、吐出出力の要求値が半吐出状態と全吐出状態を切り換える閾値未満のときに、所定のインターバル(休止期間)を空けて繰り返し実行される。
(Engine stability period learning process)
FIG. 11 is a flowchart showing a schematic flow of the learning process in the engine stable period. The process shown in FIG. 11 is repeatedly executed with a predetermined interval (rest period) when the required value of the discharge output is less than a threshold value for switching between the half-discharge state and the full-discharge state during engine operation.
(エンジン回転数判定処理S250)
判定情報更新部148cは、センサ150aの出力値に基づいて、エンジン回転数が第2所定値以下であるか否かを判定する。その結果、エンジン回転数が第2所定値以下である場合、エンジン回転変化量判定処理S252に処理を移す。エンジン回転数が第2所定値より大きい場合、当該エンジン回転数判定処理S250を繰り返す。当該エンジン回転数判定処理S250では、上記のエンジン回転数判定処理S204と同様、エンジン回転数が大きすぎて、学習処理が遂行できなくなる事態を回避する。
(Engine speed determination processing S250)
The determination
(エンジン回転変化量判定処理S252)
判定情報更新部148cは、センサ150aの出力値に基づいて、直前の測定単位時間において、エンジン回転変化量が所定範囲に含まれるか否かを判定する。その結果、エンジン回転変化量が所定範囲に含まれる場合は、所定タイマカウントアップ処理S254に処理を移す。エンジン回転変化量が所定範囲に含まれない場合は、エンジン回転数判定処理S250に処理を移す。
(Engine rotation change determination processing S252)
Based on the output value of the
(所定タイマカウントアップ処理S254)
判定情報更新部148cは、所定タイマをカウントアップする。ここで、所定タイマは、図9に示す所定時間を計時するためのカウンタであり、所定タイマがタイマ第1閾値以上となると、所定時間が経過したことを示す。
(Predetermined timer count-up process S254)
The determination
(所定タイマ判定処理S256)
判定情報更新部148cは、所定タイマがタイマ第1閾値以上であるか否かを判定する。その結果、所定タイマがタイマ第1閾値以上であると判定すると、吐出出力置換処理S258に処理を移す。所定タイマがタイマ第1閾値未満であると判定すると、エンジン回転数判定処理S250に処理を移す。
(Predetermined timer determination process S256)
The determination
(吐出出力置換処理S258)
判定情報更新部148cは、吐出出力の要求値として、センサ150aの出力値から計算する代わりに、実際にセンサ150aの出力値から導出される要求値よりも大きな値に設定する。
(Discharge output replacement process S258)
Instead of calculating from the output value of the
(学習タイマカウントアップ処理S260)
判定情報更新部148cは、学習タイマをカウントアップする。ここで、学習タイマは、図9に示す学習期間を計時するためのカウンタであり、学習タイマがタイマ第2閾値以上となると、学習期間の上限時間が経過したことを示す。
(Learning timer count-up process S260)
The determination
(学習タイマ判定処理S262)
判定情報更新部148cは、学習タイマがタイマ第2閾値以下であるか否かを判定する。その結果、学習タイマが第2閾値以下であると判定すると、油温領域特定処理S264に処理を移す。学習タイマが第2閾値より大きいと判定すると、タイマクリア処理S268に処理を移す。
(Learning timer determination processing S262)
The determination
(油温領域特定処理S264)
判定情報更新部148cは、センサ150aの出力値に基づいて、作動油の油温が低温領域、常温領域、高温領域のいずれに属するかを判断する。このとき、作動油の油温が低温領域の下限値を下回る、または、高温領域の上限値を上回る、すなわち、低温領域、常温領域、高温領域のいずれにも該当しないと、学習処理の対象外となる。
(Oil temperature region specifying process S264)
The determination
(油温学習対象判定処理S266)
判定情報更新部148cは、作動油の油温が、学習処理の対象外であるか否かを判定する。その結果、作動油の油温が、学習処理の対象外であると判定した場合は、タイマクリア処理S268に処理を移す。このように、油温が極端に低温、または、高温の場合に、学習処理を行わないことで、油温の挙動が不安定な状態での実測値による誤学習を回避することができる。作動油の油温が、学習処理の対象外でないと判定した場合は、学習処理S212に処理を移す。
(Oil temperature learning target determination process S266)
The determination
(学習処理S212)
判定情報更新部148cは、特定された油温領域に対応する閾値について、学習処理を遂行する。当該学習処理S212については、後に詳述する。
(Learning process S212)
The determination
(タイマクリア処理S268)
判定情報更新部148cは、所定タイマ、および、学習タイマをそれぞれクリアする(0にする)。
(Timer clear processing S268)
The determination
(吐出出力要求値計算処理S270)
判定情報更新部148cは、吐出出力の要求値を、センサ150aの出力値から導出した値に収束させる。
(Discharge output request value calculation process S270)
The determination
(学習処理S212)
図12は、エンジン始動時学習処理およびエンジン安定期間学習処理における学習処理S212の概略的な流れを示すフローチャートである。エンジン始動時学習処理およびエンジン安定期間学習処理双方の学習処理S212は、実質的に等しいため、同一のフローチャートで示す。
(Learning process S212)
FIG. 12 is a flowchart showing a schematic flow of the learning process S212 in the engine starting learning process and the engine stable period learning process. Since the learning process S212 of both the engine start time learning process and the engine stable period learning process are substantially equal, they are shown in the same flowchart.
(実測値取得処理S212−2)
判定情報更新部148cは、ライン圧センサ150bの出力値に基づいて、吐出出力の実測値を取得する。また、判定情報更新部148cは、センサ150aの出力値に基づいて、吐出出力の実測値を測定したときのエンジン回転数も取得する。
(Actual value acquisition process S212-2)
The determination
(仮係数導出処理S212−4)
判定情報更新部148cは、実測値取得処理S212−2で取得した吐出出力の実測値を、実測値取得処理S212−2で取得したエンジン回転数で除算して仮係数を導出する。
(Temporary coefficient derivation process S212-4)
The determination
(変動誤差判定処理S212−6)
判定情報更新部148cは、センサ150aの出力に基づいて、現在の油温に対応する油温領域の記憶係数と、仮係数との差分の絶対値が、変動誤差範囲より大きいか否かを判定する。変動誤差範囲は、予め設定された値である。その結果、記憶係数と仮係数との差分の絶対値が、変動誤差範囲より大きいと判定された場合は、記憶係数比較処理S212−8に処理を移す。記憶係数と、仮係数との差分値の絶対値が、変動誤差範囲と判定された場合、仮係数は、記憶係数に対して変動誤差の範囲に収まっているものとして記憶係数の更新は行わず、当該学習処理S212を終了する。
(Variation error determination processing S212-6)
The determination
(記憶係数比較処理S212−8)
判定情報更新部148cは、記憶係数が、仮係数よりも小さいか否かを判定する。その結果、記憶係数が、仮係数よりも小さいと判定された場合は、記憶係数加算処理S212−10に処理を移す。記憶係数が、仮係数以上と判定された場合は、記憶係数減算処理S212−16に処理を移す。
(Storage coefficient comparison processing S212-8)
The determination
(記憶係数加算処理S212−10)
判定情報更新部148cは、記憶係数を、記憶部148aに記憶されている記憶係数に、予め設定された所定の加算値を加算した値に更新する。
(Storage coefficient addition processing S212-10)
The determination
(記憶係数上限判定処理S212−12)
判定情報更新部148cは、記憶係数加算処理S212−10で更新した記憶係数が、油温領域ごとに予め設定された学習上限未満であるか否かを判定する。その結果、記憶係数加算処理S212−10で更新後の記憶係数が、油温領域ごとに予め設定された学習上限未満であると判定された場合は、当該学習処理S212を終了する。記憶係数加算処理S212−10で更新後の記憶係数が、油温領域ごとに予め設定された学習上限以上であると判定された場合は、記憶係数限定処理S212−14に処理を移す。
(Storage coefficient upper limit determination processing S212-12)
The determination
(記憶係数限定処理S212−14)
判定情報更新部148cは、記憶係数を、油温領域ごとに予め設定された学習上限の値に更新する。
(Storage coefficient limiting process S212-14)
The determination
(記憶係数減算処理S212−16)
判定情報更新部148cは、記憶係数を、予め設定された所定の減算値を、記憶部148aに記憶されている記憶係数から減算した値に更新する。ここで、減算値は、加算値よりも大きな所定の値となっている。
(Storage coefficient subtraction process S212-16)
The determination
(記憶係数下限判定処理S212−18)
判定情報更新部148cは、記憶係数減算処理S212−16で更新後の記憶係数が、油温領域ごとに予め設定された学習下限より大きいか否かを判定する。その結果、記憶係数減算処理S212−16で更新後の記憶係数が、油温領域ごとに予め設定された学習下限より大きいと判定された場合は、当該学習処理S212を終了する。記憶係数減算処理S212−16で更新後の記憶係数が、油温領域ごとに予め設定された学習下限以下であると判定された場合は、記憶係数限定処理S212−20に処理を移す。
(Storage coefficient lower limit determination processing S212-18)
The determination
(記憶係数限定処理S212−20)
判定情報更新部148cは、記憶係数を、油温領域ごとに予め設定された学習下限の値に更新する。
(Storage coefficient limiting process S212-20)
The determination
上述したように、可変容量オイルポンプ1の制御装置148は、エンジン回転数と、エンジン回転数における吐出出力の実測値に基づいて、判定情報を更新するため、適正な閾値が特定され、燃費改善を図ることが可能となる。
As described above, the
(変形例)
上記の実施形態では、記憶係数は、1回の学習処理S212が遂行されるごとに、最大で、予め設定された加算値、または、減算値分だけ変化する場合について説明した。変形例においては、記憶係数への実測値(仮係数)の反映がより迅速に遂行される場合について説明する。
(Modification)
In the above-described embodiment, a case has been described in which the storage coefficient changes by a preset addition value or subtraction value at the maximum every time the learning process S212 is performed once. In the modification, a case will be described in which the actual value (provisional coefficient) is reflected more quickly on the storage coefficient.
(変形例の学習処理S212)
図13は、変形例における学習処理S212の概略的な処理の流れを示すフローチャートである。図13において、上述した実施形態における学習処理S212と実質的に同じ処理については、同一の符号を付して説明を省略する。
(Learning Process S212 of Modification)
FIG. 13 is a flowchart showing a schematic process flow of the learning process S212 in the modification. In FIG. 13, processes that are substantially the same as the learning process S <b> 212 in the embodiment described above are denoted by the same reference numerals and description thereof is omitted.
(記憶係数変化量判定処理S212−50)
判定情報更新部148cは、仮係数から記憶係数を減算した差分値が、学習変化量上限未満であるか否かを判定する。ここで、学習変化量上限は、学習処理S212で許容される記憶係数の変化量の上限として、予め定められる。その結果、仮係数から記憶係数を減算した差分値が、学習変化量上限未満であると判定された場合は、記憶係数通常更新処理S212−52に処理を移す。仮係数から記憶係数を減算した差分値が、学習変化量上限以上であると判定された場合は、記憶係数上限更新処理S212−54に処理を移す。
(Memory coefficient change amount determination processing S212-50)
The determination
(記憶係数通常更新処理S212−52)
判定情報更新部148cは、記憶係数を仮係数の値に更新する。
(Storage coefficient normal update process S212-52)
The determination
(記憶係数上限更新処理S212−54)
判定情報更新部148cは、記憶係数を、記憶係数に学習変化量上限を加算した値に更新する。
(Storage coefficient upper limit update processing S212-54)
The determination
(記憶係数変化量判定処理S212−56)
判定情報更新部148cは、記憶係数から仮係数を減算した差分値が、学習変化量上限未満であるか否かを判定する。その結果、記憶係数から仮係数を減算した差分値が、学習変化量上限未満であると判定された場合は、記憶係数通常更新処理S212−58に処理を移す。記憶係数から仮係数を減算した差分値が、学習変化量上限以上であると判定された場合は、記憶係数上限更新処理S212−60に処理を移す。
(Storage coefficient change amount determination processing S212-56)
The determination
(記憶係数通常更新処理S212−58)
判定情報更新部148cは、記憶係数を仮係数の値に更新する。
(Storage coefficient normal update process S212-58)
The determination
(記憶係数上限更新処理S212−60)
判定情報更新部148cは、記憶係数を、記憶係数から学習変化量上限を減算した値に更新する。
(Storage coefficient upper limit update processing S212-60)
The determination
変形例においても、上述した実施形態と同様、可変容量オイルポンプ1の制御装置148は、閾値を適正に設定し、燃費改善を図ることが可能となる。また、記憶係数を更新するとき、仮係数で記憶係数を上書きすることから、吐出出力の実測値を迅速に閾値の傾きに反映することが可能となる。
Also in the modified example, as in the above-described embodiment, the
上述した実施形態および変形例では、判定情報更新部148cは、半吐出状態において、吐出出力の目標値を、吐出出力の要求値よりも高く設定することで、吐出可能出力を測定して実測値を取得する場合について説明した。しかし、判定情報更新部148cは、半吐出状態において、吐出出力の目標値を、吐出出力の要求値よりも高く設定せずともよい。ただし、半吐出状態において、吐出出力の目標値を、吐出出力の要求値よりも高く設定することで、吐出出力の要求値を満たしつつ、半吐出状態における吐出可能出力を実測することが可能となる。
In the embodiment and the modification described above, the determination
また、上述した実施形態および変形例では、判定情報は、少なくともエンジン回転数に所定の係数を乗算する式を含む計算式であって、判定情報更新部148cは、記憶部148aに記憶されている計算式の係数である記憶係数を更新する場合について説明した。しかし、判定情報は、計算式に限らずマップであってもよい。この場合、マップは、例えば、エンジン回転数を複数の回転数領域に区分し、回転数領域ごとに閾値が対応付けられた情報である。学習処理においては、判定情報更新部148cは、吐出出力の実測値が測定されたときのエンジン回転数が含まれる回転数領域に対応付けられた閾値を、吐出出力の実測値で更新する。そして、出力切換部148bは、更新されたマップを参照し、そのときのエンジン回転数が含まれる回転数領域に対応付けられた閾値を取得し、センサ150aの出力から導出された吐出出力の要求値が、取得した閾値以上であるか否かを判定する。
In the embodiment and the modification described above, the determination information is a calculation formula including at least a formula for multiplying the engine speed by a predetermined coefficient, and the determination
また、判定情報更新部148cは、記憶係数を更新するのではなく、マップに記憶されたエンジン回転数範囲ごとの閾値を更新してもよい。ただし、判定情報を計算式とし、記憶係数を更新することで、記憶部148aに記憶させるデータ量を抑制できるとともに、1回の学習処理で、広範囲のエンジン回転数に対応する閾値すべてを補正可能となる。
Further, the determination
また、上述した実施形態および変形例では、判定情報更新部148cは、エンジン回転数、および、エンジン回転数における吐出出力の実測値に基づいて仮係数を導出し、導出した仮係数と記憶係数との比較結果に基づいて、記憶係数を更新する場合について説明した。しかし、判定情報更新部148cは、仮係数を導出しなくてもよいし、仮係数と記憶係数との比較結果に基づいて、記憶係数を更新せずともよい。ただし、判定情報更新部148cは、仮係数を導出し、仮係数と記憶係数との比較結果に基づいて、記憶係数を更新することで、吐出出力の実測値を適切に記憶係数に反映することが可能となる。
In the embodiment and the modification described above, the determination
また、上述した実施形態および変形例では、判定情報更新部148cは、記憶係数と仮係数との差分が、所定の変動誤差範囲外となると、判定情報を更新する場合について説明した。しかし、判定情報更新部148cは、記憶係数と仮係数との差分が変動誤差範囲に含まれる場合であっても、判定情報を更新してもよい。ただし、判定情報更新部148cは、記憶係数と仮係数との差分が、所定の変動誤差範囲外となると、判定情報を更新することで、吐出可能出力やエンジン回転数の測定誤差による記憶係数の誤学習を抑えるとともに、処理負荷を低減することができる。
In the embodiment and the modification described above, the determination
また、上述した変形例では、判定情報更新部148cは、仮係数が記憶係数よりも大きい場合、記憶係数通常更新処理S212−52において、記憶係数として仮係数を記憶する場合について説明した。この場合、記憶係数に、吐出出力の実測値を迅速に反映することが可能となる。
In the above-described modification, the determination
また、上述した実施形態では、判定情報更新部148cは、仮係数が記憶係数よりも大きい場合、記憶係数加算処理S212−10において、所定の加算値を、記憶部148aに記憶されている記憶係数に加算した値に、記憶係数を更新する場合について説明した。この場合、吐出出力のオーバーシュートの影響による誤学習の発生を抑制することが可能となる。
In the above-described embodiment, when the provisional coefficient is larger than the storage coefficient, the determination
また、上述した実施形態では、判定情報更新部148cは、仮係数が記憶係数よりも小さい場合、記憶係数減算処理S212−16において、加算値よりも大きな所定の減算値を、記憶部148aに記憶されている記憶係数から減算した値に、記憶係数を更新する場合について説明した。この場合、記憶係数が適正値よりも大きく設定されているとき、吐出出力の変動誤差によって極端に閾値が小さく設定される事態の発生を抑制することができる。また、加算値よりも減算値が大きく設定されていることから、記憶係数を小さくする方が大きくするときよりも、実測値の反映を迅速とすることができ、全吐出状態への切り換えがされず吐出出力が不足するといった事態の発生を抑制することが可能となる。
Further, in the above-described embodiment, when the temporary coefficient is smaller than the storage coefficient, the determination
また、上述した変形例では、判定情報更新部148cは、仮係数が記憶係数よりも小さい場合、記憶係数通常更新処理S212−58において、記憶係数として仮係数を記憶する場合について説明した。この場合、記憶係数に、吐出出力の実測値を迅速に反映することが可能となる。
In the above-described modification, the determination
また、上述した実施形態および変形例では、判定情報は、予め設定された複数の油温領域(低温領域、常温領域、高温領域)毎に設定される場合について説明したが、判定情報を複数の油温領域毎に設定せずともよい。例えば、判定情報を油温に拘わらず設定しておき、油温に応じて設定される補正係数を判定情報に組み込んでもよい。特に、一定期間、学習処理がなされていない油温領域の判定情報についてのみ、学習処理がなされている油温領域の判定情報に対して補正係数を組み込むことで、判定情報を補正してもよい。ただし、判定情報を複数の油温領域毎に設定することで、判定情報を一層適正な値に維持することが可能となる。 Further, in the above-described embodiment and the modification, the case where the determination information is set for each of a plurality of preset oil temperature regions (low temperature region, normal temperature region, high temperature region) has been described. It is not necessary to set for each oil temperature region. For example, the determination information may be set regardless of the oil temperature, and a correction coefficient set according to the oil temperature may be incorporated in the determination information. In particular, the determination information may be corrected by incorporating a correction coefficient into the determination information of the oil temperature region that has been subjected to the learning process only for the determination information of the oil temperature region that has not been subjected to the learning process for a certain period. . However, the determination information can be maintained at a more appropriate value by setting the determination information for each of a plurality of oil temperature regions.
また、上述した実施形態および変形例では、油温領域が3つ設けられる場合について説明したが、油温領域は、1つまたは2つでもよいし、4つ以上であってもよい。 In the embodiment and the modification described above, the case where three oil temperature regions are provided has been described. However, one or two oil temperature regions may be provided, or four or more oil temperature regions may be provided.
また、上述した実施形態では、仮係数が記憶係数よりも大きい場合、所定の加算値を、記憶部148aに記憶されている記憶係数に加算した値に、記憶係数を更新し、仮係数が記憶係数よりも小さい場合、加算値よりも大きな所定の減算値を、記憶部148aに記憶されている記憶係数から減算した値に、記憶係数を更新する場合について説明した。しかし、仮係数が記憶係数よりも小さい場合は、上述した変形例と同様、記憶係数として仮係数を記憶してもよい。この場合、記憶係数を大きくする補正は徐々に反映されることから、吐出出力のオーバーシュートの影響による誤学習の発生を抑制できる上、記憶係数を小さくする方が、大きくするときよりも一層迅速に、吐出出力を閾値に反映することができることから、さらなる安定性の向上を図ることが可能となる。
In the above-described embodiment, when the temporary coefficient is larger than the storage coefficient, the storage coefficient is updated to a value obtained by adding a predetermined addition value to the storage coefficient stored in the
以上、添付図面を参照しつつ本発明の好適な実施形態について説明したが、本発明は上述した実施形態に限定されないことは勿論であり、特許請求の範囲に記載された範疇における各種の変更例又は修正例についても、本発明の技術的範囲に属することは言うまでもない。 The preferred embodiments of the present invention have been described above with reference to the accompanying drawings. However, the present invention is not limited to the above-described embodiments, and various modifications within the scope described in the claims. Needless to say, the modified examples also belong to the technical scope of the present invention.
本発明は、主に車両に搭載される可変容量オイルポンプの制御装置に利用できる。 The present invention can be used mainly for a control device of a variable displacement oil pump mounted on a vehicle.
1 可変容量オイルポンプ
10a ハウジング側第1吐出ポート(吐出ポート)
10b カバー側第1吐出ポート(吐出ポート)
11a ハウジング側第2吐出ポート(吐出ポート)
11b カバー側第2吐出ポート(吐出ポート)
148 制御装置
148a 記憶部
148b 出力切換部
148c 判定情報更新部
1 Variable
10b Cover side first discharge port (discharge port)
11a Housing side second discharge port (discharge port)
11b Cover side second discharge port (discharge port)
148
Claims (10)
前記半吐出状態と前記全吐出状態とを切り換える閾値をエンジン回転数に応じて特定するための判定情報が記憶された記憶部と、
エンジン回転数、および、該エンジン回転数における吐出出力の実測値に基づいて、前記記憶部に記憶された前記判定情報を更新する判定情報更新部と、
前記記憶部に記憶されている前記判定情報、および、エンジン回転数に基づいて、前記閾値を特定するとともに、吐出出力の要求値が、特定した該閾値以上であるか否かによって、前記半吐出状態と前記全吐出状態とを切り換える出力切換部と、
を備えることを特徴とする可変容量オイルポンプの制御装置。 There are two discharge ports, one half of the two discharge ports discharges the hydraulic oil at a higher pressure than the other, the two discharge ports discharge the hydraulic oil from both the half discharge states, Is a variable displacement oil pump control device capable of switching all discharge states with a large dischargeable output corresponding to the engine speed,
A storage unit storing determination information for specifying a threshold value for switching between the half-discharge state and the full-discharge state according to the engine speed;
A determination information updating unit that updates the determination information stored in the storage unit based on an engine speed and an actual measurement value of a discharge output at the engine speed;
The threshold value is specified based on the determination information stored in the storage unit and the engine speed, and the half-discharge is determined based on whether or not a required discharge output value is equal to or more than the specified threshold value. An output switching unit that switches between a state and the total discharge state;
A control apparatus for a variable displacement oil pump, comprising:
前記判定情報更新部は、前記記憶部に記憶されている前記計算式の前記係数である記憶係数を更新することを特徴とする請求項1または2に記載の可変容量オイルポンプの制御装置。 The determination information is a calculation formula including at least an equation for multiplying the engine speed by a predetermined coefficient, and the determination information update unit includes a storage coefficient that is the coefficient of the calculation formula stored in the storage unit. The control apparatus for a variable displacement oil pump according to claim 1 or 2, wherein the control apparatus is updated.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015114673A JP6506632B2 (en) | 2015-06-05 | 2015-06-05 | Control device of variable displacement oil pump |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015114673A JP6506632B2 (en) | 2015-06-05 | 2015-06-05 | Control device of variable displacement oil pump |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2017002740A true JP2017002740A (en) | 2017-01-05 |
| JP6506632B2 JP6506632B2 (en) | 2019-04-24 |
Family
ID=57753651
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015114673A Active JP6506632B2 (en) | 2015-06-05 | 2015-06-05 | Control device of variable displacement oil pump |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP6506632B2 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7575287B2 (en) | 2021-02-12 | 2024-10-29 | 株式会社Subaru | Oil pump discharge volume switching device |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6483808A (en) * | 1987-09-28 | 1989-03-29 | Mazda Motor | Oil pump control device for engine |
| JPH08114186A (en) * | 1994-08-25 | 1996-05-07 | Aisin Seiki Co Ltd | Oil pump device |
| JPH0988533A (en) * | 1995-09-26 | 1997-03-31 | Tokyo Buhin Kogyo Kk | Engine lubricant oil feeder |
| JP2003328959A (en) * | 2003-06-13 | 2003-11-19 | Hitachi Unisia Automotive Ltd | Oil pump |
-
2015
- 2015-06-05 JP JP2015114673A patent/JP6506632B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6483808A (en) * | 1987-09-28 | 1989-03-29 | Mazda Motor | Oil pump control device for engine |
| JPH08114186A (en) * | 1994-08-25 | 1996-05-07 | Aisin Seiki Co Ltd | Oil pump device |
| JPH0988533A (en) * | 1995-09-26 | 1997-03-31 | Tokyo Buhin Kogyo Kk | Engine lubricant oil feeder |
| JP2003328959A (en) * | 2003-06-13 | 2003-11-19 | Hitachi Unisia Automotive Ltd | Oil pump |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7575287B2 (en) | 2021-02-12 | 2024-10-29 | 株式会社Subaru | Oil pump discharge volume switching device |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6506632B2 (en) | 2019-04-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2012165471A1 (en) | Railway car vibration control device | |
| EP2722248B1 (en) | Railcar damping device | |
| JP2009133216A (en) | Valve timing control apparatus | |
| CA2902472C (en) | Vane pump with multiple control chambers | |
| JP6885812B2 (en) | Flood control device and flood control method | |
| WO2014187503A1 (en) | Variable displacement lubricant pump | |
| CN102644589A (en) | Oil pump | |
| US20160084249A1 (en) | Variable displacement vane pump | |
| US20150377234A1 (en) | Relief device for oil circuit of engine | |
| JP2019183679A (en) | Variable capacity type oil pump device | |
| JP6107884B2 (en) | Engine oil pump control device | |
| US20150377097A1 (en) | Relief device for oil circuit of engine | |
| JP2017002740A (en) | Control device for variable displacement oil pump | |
| Nishida et al. | Development of continuously variable discharge oil pump | |
| WO2018051674A1 (en) | Variable-capacity pump and working oil supply system of internal-combustion engine | |
| JP2017002930A (en) | Control device of oil pump | |
| US9212780B2 (en) | Control valve | |
| WO2018051673A1 (en) | Variable capacity pump and hydraulic fluid supply system for internal combustion engine | |
| JP6632227B2 (en) | Engine oil circuit relief device | |
| JP4275119B2 (en) | Hydraulic supply pump | |
| CN113482981A (en) | Speed regulation control method for vehicle traveling closed hydraulic system | |
| US11802559B2 (en) | Vane pump | |
| JP2016114204A (en) | Pressure adjustment system | |
| JP2017020562A (en) | Relief valve | |
| JP6670142B2 (en) | Hydraulic control device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20180308 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20181220 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20190108 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20190225 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20190305 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20190329 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6506632 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |