JP2016200478A - Position estimation device - Google Patents
Position estimation device Download PDFInfo
- Publication number
- JP2016200478A JP2016200478A JP2015080279A JP2015080279A JP2016200478A JP 2016200478 A JP2016200478 A JP 2016200478A JP 2015080279 A JP2015080279 A JP 2015080279A JP 2015080279 A JP2015080279 A JP 2015080279A JP 2016200478 A JP2016200478 A JP 2016200478A
- Authority
- JP
- Japan
- Prior art keywords
- arrival direction
- reflection
- array antenna
- mobile terminal
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images








Landscapes
- Position Fixing By Use Of Radio Waves (AREA)
Abstract
Description
本発明は、到来方向推定法によって車両に対する携帯端末の位置を推定する位置推定装置に関する。 The present invention relates to a position estimation device that estimates the position of a mobile terminal with respect to a vehicle by an arrival direction estimation method.
従来、車両に搭載された車載機(位置推定装置とする)と、ユーザによって携帯される携帯端末とが連携し、周知の到来方向推定法によって車両に対する携帯端末の位置を推定する位置推定システムが種々提案されている。 2. Description of the Related Art Conventionally, a position estimation system that estimates the position of a mobile terminal with respect to a vehicle by a well-known arrival direction estimation method in cooperation with an in-vehicle device (referred to as a position estimation device) mounted on the vehicle and a mobile terminal carried by a user. Various proposals have been made.
例えば特許文献1に開示の位置推定システムにおける携帯端末は、車両の位置を推定するためのユーザ操作に基づいて、UHF帯の探索信号を送信する。一方、その携帯端末に対応する位置推定装置は、携帯端末から送信された探索信号をアレイアンテナで受信し、アレイアンテナで受信した信号の受信態様(位相や振幅)を解析することによって、探索信号の到来方向を推定する。また、この位置推定装置は、受信した探索信号の受信信号強度から車両に対する携帯端末の距離を推定する。 For example, the portable terminal in the position estimation system disclosed in Patent Document 1 transmits a UHF band search signal based on a user operation for estimating the position of the vehicle. On the other hand, the position estimation device corresponding to the mobile terminal receives the search signal transmitted from the mobile terminal by the array antenna, and analyzes the reception mode (phase and amplitude) of the signal received by the array antenna, thereby Is estimated. Moreover, this position estimation apparatus estimates the distance of the portable terminal with respect to the vehicle from the received signal strength of the received search signal.
そして、その位置推定装置は、到来方向と距離とから車両に対する携帯端末の相対的な位置を推定する。なお、電波の到来方向を推定する方法としては、例えばMUSIC(Multiple Signal Classification)法等、周知の到来方向推定法を採用することができる。 And the position estimation apparatus estimates the relative position of the portable terminal with respect to the vehicle from the arrival direction and the distance. As a method for estimating the arrival direction of radio waves, a known arrival direction estimation method such as a MUSIC (Multiple Signal Classification) method can be employed.
無線通信の電波、例えば2.4GHz帯の電波は、他車両のボディ(つまり金属板)等で反射しやすく、また、人体や水、および反射波の重ね合わせによって、大きく減衰する特性がある。 A radio communication radio wave, for example, a 2.4 GHz band radio wave is easily reflected by the body (that is, a metal plate) of another vehicle, and has a characteristic of being greatly attenuated by superposition of a human body, water, and the reflected wave.
したがって、例えば自車両の周辺に他車両が駐車されている場合等といった、携帯端末から送信された電波が反射されて到達する可能性が高い環境(いわゆるマルチパス環境)下に自車両が存在する場合には、位置推定装置は、電波の到来方向として反射波が到来している方向を検出する場合がある。 Therefore, for example, when the other vehicle is parked around the own vehicle, the own vehicle exists in an environment (so-called multipath environment) in which the radio wave transmitted from the mobile terminal is highly likely to be reflected and reached. In some cases, the position estimation device may detect the direction in which the reflected wave is arriving as the arrival direction of the radio wave.
そして、位置推定装置は、反射波の到来方向を携帯端末が存在する方向であると誤認識してしまうと、携帯端末の位置を誤った位置に推定することになる。つまり、マルチパス環境下においては、携帯端末の位置の推定精度が低下してしまう傾向がある。 And if a position estimation apparatus misrecognizes that the arrival direction of a reflected wave is a direction in which a portable terminal exists, it will estimate the position of a portable terminal in the wrong position. That is, in the multipath environment, the estimation accuracy of the position of the mobile terminal tends to be lowered.
本発明は、この事情に基づいて成されたものであり、その目的とするところは、マルチパス環境下においてもより精度良く車両に対する携帯端末の位置を推定できる位置推定装置を提供することにある。 The present invention has been made based on this situation, and an object of the present invention is to provide a position estimation device capable of estimating the position of a mobile terminal with respect to a vehicle with higher accuracy even in a multipath environment. .
その目的を達成するための本発明は、車両に搭載され、車両のユーザによって携帯される携帯端末からの電波を受信する複数のアンテナ素子を備えるアレイアンテナ(11、11A、11B)と、アレイアンテナが受信した電波の到来方向を推定する到来方向推定部(13、13A、13B)と、到来方向推定部の推定結果に基づいて、車両に対する携帯端末の位置を推定する位置推定部(16)と、車両周辺に存在する物体を検出し、その検出した物体の位置に基づいて、携帯端末からの電波を反射しうる面である反射面の、車両に対する位置及び角度を特定する反射面位置特定部(2)と、を備え、位置推定部は、到来方向推定部が推定した到来方向に、反射面位置特定部によって特定された反射面が存在するか否かを判定し、反射面が存在しない方向となっている到来方向である直接到来方向が存在する場合には、当該直接到来方向に基づいて車両に対する携帯端末の位置を推定することを特徴とする。 To achieve the object, the present invention provides an array antenna (11, 11A, 11B) including a plurality of antenna elements mounted on a vehicle and receiving radio waves from a portable terminal carried by the user of the vehicle, and an array antenna. A direction-of-arrival estimation unit (13, 13A, 13B) that estimates the direction of arrival of the received radio wave, and a position estimation unit (16) that estimates the position of the mobile terminal relative to the vehicle based on the estimation result of the direction-of-arrival estimation unit; A reflection surface position specifying unit that detects an object existing around the vehicle and specifies a position and an angle of the reflection surface, which is a surface that can reflect radio waves from the mobile terminal, based on the position of the detected object. (2), and the position estimation unit determines whether or not the reflection surface specified by the reflection surface position specification unit exists in the arrival direction estimated by the arrival direction estimation unit. When the direct arrival direction is the direction of arrival that is the resident city direction exists, and estimates the position of the portable terminal to the vehicle on the basis of the direct arrival direction.
以上の構成では、位置推定部は、反射面位置特定部によって特定されている車両周辺の反射面の位置に基づいて、到来方向推定部が推定した到来方向に反射面が存在するか否かを判定する。 In the above configuration, the position estimation unit determines whether there is a reflection surface in the arrival direction estimated by the arrival direction estimation unit based on the position of the reflection surface around the vehicle specified by the reflection surface position specification unit. judge.
到来方向に反射面が存在するということは、その到来方向は、反射波が到来している方向(反射到来方向とする)であることを意味している。そして、反射波が到来している方向には、携帯端末が存在しない可能性が高い。 The presence of a reflection surface in the arrival direction means that the arrival direction is a direction in which a reflected wave arrives (referred to as a reflection arrival direction). And there is a high possibility that the mobile terminal does not exist in the direction in which the reflected wave arrives.
一方、到来方向に反射面が存在しないということは、その到来方向は、携帯端末から送信された電波を直接受信している方向であることを意味している。すなわち、反射面が存在しない到来方向である直接到来方向は、携帯端末が存在している方向(端末方向とする)を表している。 On the other hand, the absence of a reflecting surface in the arrival direction means that the arrival direction is a direction in which a radio wave transmitted from the mobile terminal is directly received. That is, the direct arrival direction, which is the arrival direction in which no reflection surface exists, represents the direction in which the mobile terminal exists (referred to as the terminal direction).
つまり、以上の構成において位置推定部は、反射面の位置に基づいて、到来方向推定部が推定した到来方向が、端末方向に相当する直接到来方向であるか否かを識別する。これにより、反射到来方向を端末方向であると誤判定することを抑制することができる。 That is, in the above configuration, the position estimation unit identifies whether the arrival direction estimated by the arrival direction estimation unit is a direct arrival direction corresponding to the terminal direction based on the position of the reflection surface. Thereby, it can suppress misjudging that the reflection arrival direction is a terminal direction.
したがって、以上の構成によれば、反射波が到来している方向を端末方向であると誤判定する可能性を抑制でき、その結果、マルチパス環境下においてもより精度良く車両に対する携帯端末の位置を推定できる。 Therefore, according to the above configuration, it is possible to suppress the possibility of erroneously determining that the direction in which the reflected wave arrives is the terminal direction, and as a result, the position of the mobile terminal with respect to the vehicle more accurately even in a multipath environment. Can be estimated.
なお、特許請求の範囲に記載した括弧内の符号は、一つの態様として後述する実施形態に記載の具体的手段との対応関係を示すものであって、本発明の技術的範囲を限定するものではない。 In addition, the code | symbol in the parenthesis described in the claim shows the correspondence with the specific means as described in embodiment mentioned later as one aspect, Comprising: The technical scope of this invention is limited is not.
[実施形態]
以下、本発明の実施形態について図を用いて説明する。図1は、本実施形態に係る位置推定装置を適用した位置推定システム1000の概略的な構成の一例を示す図である。図1に示すように位置推定システム1000は、車両に搭載されている車載システム100と、ユーザによって携帯される携帯端末200とを備えている。
[Embodiment]
Hereinafter, embodiments of the present invention will be described with reference to the drawings. FIG. 1 is a diagram illustrating an example of a schematic configuration of a position estimation system 1000 to which the position estimation apparatus according to the present embodiment is applied. As shown in FIG. 1, the position estimation system 1000 includes an in-
車載システム100と携帯端末200は、通信範囲が例えば最大でも数十メートル程度となる所定の近距離無線通信規格に準拠した通信(近距離通信とする)を実施する。携帯端末200は上述の近距離通信機能を備えていればよく、例えばスマートフォン等の携帯電話機を、携帯端末200として用いることができる。もちろん、携帯端末200は、携帯電話機に限らず、タブレット端末、ウェアラブルデバイス、携帯用音楽プレーヤ、携帯用ゲーム機等であってもよい。
The in-
ここでの近距離無線通信規格としては、例えばBluetooth Low Energy(Bluetoothは登録商標)や、Wi−Fi(登録商標)、ZigBee(登録商標)等を採用することができる。 As the near field communication standard here, for example, Bluetooth Low Energy (Bluetooth is a registered trademark), Wi-Fi (registered trademark), ZigBee (registered trademark), or the like can be adopted.
また、車載システム100と携帯端末200との通信に用いられる通信規格は、他の通信規格に準拠した通信を実施する態様となっていてもよく、例えば周知のキーレスエントリーシステムやスマートエントリーシステムで採用されているものであってもよい。
Moreover, the communication standard used for communication between the in-
以下、携帯端末200及び車載システム100の構成の一例について、より具体的に説明する。なお、便宜上、車載システム100が搭載された車両を自車両と称する。
Hereinafter, an example of the configuration of the
<携帯端末200の構成>
携帯端末200は、図1に示すように、アンテナ210と、送信部220と、通信制御器230とを備える。アンテナ210は、送信部220から入力された信号を、車載システム100との近距離通信に用いられる周波数帯(例えば、2.4GHz帯)の電波に変換して空間へ放射する。
<Configuration of
As illustrated in FIG. 1, the
送信部220は、通信制御器230から入力された信号を増幅、周波数変換してアンテナ210へ出力する。通信制御器230は、携帯端末200と車載システム100との近距離通信において、携帯端末200側の動作を制御する。例えば通信制御器230は、車載システム100に送信すべきデータに対応するベースバンド信号を生成し、送信部220に出力する。これによって、携帯端末200は車載システム100に対して所望のデータを示す信号を送信することができる。
The
携帯端末200が車載システム100に対して信号を送信する場合とは、例えば図示しないスイッチを介して、自車両の位置を知るためのユーザ操作を受け付けた場合とすればよい。
The case where the
<車載システム100の構成>
車載システム100は、図1に示すように車載通信機1と、反射面特定装置2とを備える。車載通信機1は、携帯端末200から送信された信号を受信するとともに自車両に対する携帯端末200の位置を特定する。この車載通信機1が請求項に記載の位置推定装置に相当する。車載通信機1と反射面特定装置2とは、LAN(Local Area Network)を介して相互通信可能に接続されている。
<Configuration of in-
The in-
車載通信機1は、より細かい構成要素として、第1アレイアンテナ11A、第2アレイアンテナ11B、第1受信部12A、第2受信部12B、第1到来方向推定部13A、第2到来方向推定部13B、記憶部14、反射面情報取得部15、及び位置推定部16を備える。第1受信部12A、第2受信部12B、第1到来方向推定部13A、第2到来方向推定部13B、反射面情報取得部15、位置推定部16のそれぞれは、ハードウェアによって実現されてあってもよいし、ソフトウェアによって実現されてあってもよい。
The in-vehicle communication device 1 includes a
第1アレイアンテナ11Aは、指向性アンテナの一種であり、所定の間隔をおいて線状(又は面状)に配置された複数のアンテナ素子を備える。第1アレイアンテナ11Aを構成する複数のアンテナ素子はそれぞれ第1受信部12Aと接続されている。
The
ここでは一例として、各アンテナ素子は、自車両の適宜設計される位置において、その配列方向が車幅方向と平行となるように線状に配列されている。つまり、第1アレイアンテナ11Aは、車幅方向と平行に配置された線状アレイアンテナである。便宜上、水平面において第1アレイアンテナ11Aを構成する各アンテナ素子の配列方向に直交する方向を0°と規定する。なお、各アンテナ素子自体は、線状アンテナであってもよいし、平面アンテナであってもよい。また、アンテナ素子の数をN個とする。Nは2以上の自然数である。
Here, as an example, the antenna elements are arranged in a line so that the arrangement direction thereof is parallel to the vehicle width direction at a position where the vehicle is appropriately designed. That is, the
各アンテナ素子は、携帯端末200との近距離通信に用いられる周波数帯の電波を受信し、電気信号に変換して第1受信部12Aに出力する。各アンテナ素子の受信信号には、アンテナ素子間の間隔と電波の到来方向に応じた位相差が生じる。その位相差に基づいて、後述する第1到来方向推定部13Aは、受信した電波の到来方向を推定する。
Each antenna element receives radio waves in a frequency band used for short-range communication with the
また、第1アレイアンテナ11Aの指向性は、後述する第1到来方向推定部13Aによって動的に変更される。第1アレイアンテナ11Aの指向性は、0°方向を基準として−90°から+90°まで変更可能な構成となっている。第1アレイアンテナ11Aの指向性の可動範囲と設置位置とから、第1アレイアンテナ11Aが携帯端末200からの信号を受信できる範囲(受信可能範囲とする)が定まる。
The directivity of the
第2アレイアンテナ11Bは、第1アレイアンテナ11Aと同様の構成及び機能を有する。第1アレイアンテナ11Aと第2アレイアンテナ11Bとを区別しない場合には単にアレイアンテナ11と記載する。
The
第1アレイアンテナ11Aと第2アレイアンテナ11Bは、それぞれの受信可能範囲が略一致するように、車幅方向(又は車両前後方向)において所定の間隔を有するように自車両に設置されている。ここでは一例として、自車両の前端部において、車幅方向中央部から左右にそれぞれ一定距離(例えば0.2m)離れた位置に配置されているものとする。また、各アレイアンテナ11の受信可能範囲は、自車両の正面方向を0°方向とし、自車両の前端部から水平方向に−90°〜+90°までの範囲とする。
The
なお、第1アレイアンテナ11A及び第2アレイアンテナ11Bの設置位置はこれに限らない。例えば自車両のフロントバンパの左右コーナー部にそれぞれ配置されていてもよいし、リアバンパの左右コーナー部にそれぞれ配置されていても良い。さらに、その他の場所に設置されていても良い。自車両における各アレイアンテナ11の設置位置を示すデータ(設置位置データ)は、記憶部14に格納されている。記憶部14は、例えばROMやフラッシュメモリ等の、不揮発性の記憶媒体である。
The installation positions of the
第1受信部12Aは、第1アレイアンテナ11Aの各アンテナ素子が受信した信号をデジタル信号へ変換(つまりアナログデジタル変換)して、第1到来方向推定部13Aに出力する。なお、第1受信部12Aは、受信信号から、規定帯域外の周波数成分を除去するための高周波フィルタや、信号を増幅するローノイズアンプ、搬送周波数帯から中間周波数帯に変換する周波数変換部等を備えていても良い。
The
第2受信部12Bは、第1受信部12Aと同様の構成及び機能を有してあって、第2アレイアンテナ11Bが受信した信号をデジタル信号へ変換して、第2到来方向推定部13Bに出力する。第1受信部12Aと第2受信部12Bとを区別しない場合には受信部12と記載する。
The
第1到来方向推定部13Aは、周知の到来方向推定法を援用し、第1アレイアンテナ11Aが備える各アンテナ素子の受信信号を解析することで、第1アレイアンテナ11Aが受信した電波の到来方向を推定する。ここでは一例として、第1到来方向推定部13Aは、周知のビームフォーマ法によって到来方向を推定することとする。
The first arrival
つまり、第1到来方向推定部13Aは、各アンテナ素子に作用させる複素重みを調整することで、第1アレイアンテナ11Aのメインローブ(メインビーム)を走査させ、各アンテナ素子の受信信号の合成した出力電力が所定の閾値以上となる方向を探す。各アンテナ素子の受信信号の合成出力電力が所定の閾値以上となる方向が、電波の到来方向に相当する。なお、メインビームを走査させる範囲を探索範囲は、第1アレイアンテナ11Aを構成する各アンテナ素子の配列方向に直交する方向を基準(0°)として、−90°から+90°までとする。また、複素重みとは、受信信号の位相や振幅を調整するための要素である。
That is, the first arrival
以上で概略的に述べたビームフォーマ法による到来方向の推定を行うための機能ブロックとして、第1到来方向推定部13Aは、図2に示すように、複素重み付与部131Aと、重み付け指令部132Aと、相関演算部133Aと、到来方向取得部134Aを備える。複素重み付与部131Aは、各アンテナ素子の受信信号に対して、重み付け指令部132Aによって指示された複素重みを与える。なお、複素重み付与部131Aは、各アンテナ素子の受信信号の振幅を調整する振幅調整器や、各アンテナ素子の受信信号の位相を調整する位相調整器を含む。
As a functional block for estimating the direction of arrival by the beamformer method outlined above, the first direction-of-
重み付け指令部132Aは、複素重み付与部131Aが付与すべき複素重みを調整する。複素重み付与部131Aが付与すべき複素重みは、−90°から+90°までの探索範囲において順に設定(変更)される角度(探索方位角とする)に応じて定まる。探索方位角は、メインローブを向ける方向に相当する。探索方位角をθとした時の、各アンテナ素子に付加する複素重みをW(θ)として表す場合、探索方位角θと複素重みW(θ)との関係は予め設定されていればよい。なお、探索方位角θは、探索範囲において一定角度ずつ変更されればよい。ここでは−90°から+90°まで2°ずつ増加させることで、メインローブを探索範囲において走査させる。
The
相関演算部133Aは、複素重みを掛けた受信信号を合成した合成出力電力を算出する。探索方位角を或る角度θとした時の合成出力電力は、メインローブをその方向θに向けた時の第1アレイアンテナ11Aでの受信電力に相当するものである。
The
到来方向取得部134Aは、合成出力電力が所定の閾値以上となっている方向を到来方向として取得する。到来方向は、第1アレイアンテナ11Aから見て携帯端末200が存在する方向(端末方向とする)の候補に相当する。なお、反射波が到来した方向も到来方向として検出されるため、到来方向は必ずしも端末方向とは限らない。到来方向取得部134Aが取得した到来方向、すなわち端末方向の候補を示す情報を、便宜上、第1到来方向情報と称する。第1到来方向情報は、位置推定部16に提供される。
The arrival
なお、ここでは一例として、第1到来方向推定部13Aはビームフォーマ法によって到来方向を取得する態様としたが、これに限らない。例えば周知のCapon法を用いても良い。さらに、メインローブを走査(いわゆるビーム走査)させることを基本原理とするのではなく、ヌル点を走査(いわゆるヌル走査)させることで到来方向を推定する方法を採用してもよい。ヌル走査を基本原理とする到来方向推定法としては、最小ノルム法や、MUSIC(Multiple Signal Classification)法等がある。また、その他、ESPRIT(Estimation of Signal Parameters via Rotational Invariance Techniques)等を採用してもよい。
Here, as an example, the first arrival
第2到来方向推定部13Bは、第1到来方向推定部13Aと同様の構成及び機能を有する。つまり、第2到来方向推定部13Bは、第2アレイアンテナ11Bが備える各アンテナ素子に対する複素重みを調整することで、第2アレイアンテナ11Bのメインローブを走査させ、第2アレイアンテナ11Bでの受信電力が所定の閾値以上となる方向を到来方向として取得する。なお、第2アレイアンテナ11Bでの受信電力とは、複素重みが付与された、第2アレイアンテナ11Bが備える各アンテナ素子での受信信号を合成した合成出力電力に相当する。
The second arrival
便宜上、第2到来方向推定部13Bが取得した到来方向を示す情報を、第2到来方向情報とする。なお、第1到来方向推定部13Aと第2到来方向推定部13Bとを区別しない場合には到来方向推定部13と記載する。
For convenience, information indicating the arrival direction acquired by the second arrival
反射面情報取得部15は、反射面特定装置2から反射面情報を取得する。反射面情報は、受信可能範囲に存在する反射面の位置を表す情報である。この反射面情報については、別途後述する。
The reflection surface
位置推定部16は、反射面情報、第1到来方向情報、第2到来方向情報、及び記憶部14に格納されている設置位置データに基づいて、自車両に対する携帯端末200の相対位置を推定する。この位置推定部16についての詳細は、別途後述する。
The
反射面特定装置2は、自車両周辺の所定の範囲(検出範囲とする)に存在する所定の検出対象を検出する。また、その検出した物体の自車両に対する相対位置を特定する。
The reflecting
ここでの検出対象物は、例えば車両のボディや、金属製の看板、金属壁といった、携帯端末200からの電波を反射しうる物体(電波反射体とする)を含む。なお、ここで例示した全てを検出対象とする必要はなく、その一部(例えば車両のボディ)だけを検出対象物としてもよい。
The detection target here includes an object (referred to as a radio wave reflector) that can reflect radio waves from the
この反射面特定装置2は、例えばレーザレーダ、ミリ波レーダ、ソナー、車載カメラ、又はそれらの組み合わせによって実現されればよい。例えば、反射面特定装置2は、車載カメラとミリ波レーダの組み合わせによって実現されれば良い。そのような場合には、車載カメラの撮影画像に対して周知の画像認識処理を施して所定の検出対象物を検出するとともに、ミリ波レーダの検出結果に基づいて、その物体の相対位置を特定する。また、その際、画像認識処理の結果から、検出対象物の向きを特定することで、携帯端末200からの信号を反射しうる面(つまり反射面)の、自車両に対する位置及び角度を特定する。
The reflection
なお、レーザレーダは、レーザ光を間欠的に放射させることにより、水平方向及び高さ方向それぞれの所定角度の範囲にレーザ光を掃引照射(つまり、スキャン)することで、自車両周辺に存在する物体の相対位置及びその表面形状を特定できる。したがって、反射面特定装置2としてレーザレーダを採用する場合には、その検出結果に基づいて反射面の特定することができる。ただし、検出された表面形状から、周知のパターンマッチング処理によって、その検出物が電波反射体に属する物体であるか否かの識別をするものとする。
The laser radar is present around the host vehicle by intermittently emitting the laser light to sweep and irradiate the laser light in a range of a predetermined angle in each of the horizontal direction and the height direction (that is, scan). The relative position of the object and its surface shape can be specified. Therefore, when a laser radar is employed as the reflecting
反射面特定装置2の検出範囲は適宜設計されれば良いが、少なくとも第1アレイアンテナ11A及び第2アレイアンテナ11Bの受信可能範囲を含むように決定される。すなわち、本実施形態において反射面特定装置2の検出範囲は、自車両の正面方向を0°として、水平方向に−90°〜+90°までの範囲を含む。
The detection range of the reflecting
また、反射面特定装置2は、自車両において上記検出範囲を形成するように、適宜設計される位置に配置されればよい。例えば、反射面特定装置2は、自車両の前端部(フロントバンパやグリル)やフロントガラスの上端部付近に設けられればよい。
Moreover, the reflective
反射面特定装置2が特定した自車両周辺に存在する反射面の相対位置を示す情報は、反射面情報として、車載通信機1に提供される。自車両に対する反射面の相対位置は、例えば、自車両の前端部中央を原点とし、X軸とY軸とを水平面内にとったXY座標系上の座標、又はその座標群を表す関数で表されればよい。例えば、Y軸は車両前後方向に平行であって後方から前方に向かう方向を正方向とし、X軸は車幅方向に平行であって左から右に向かう方向を正方向とすればよい。この反射面特定装置2が請求項に記載の反射面位置特定部に相当する。
Information indicating the relative position of the reflecting surface existing around the host vehicle specified by the reflecting
反射面特定装置2が反射面を検出し、反射面情報を生成する場合とは、例えば車載通信機1が携帯端末200からの信号を受信した場合とすればよい。また、他の態様として反射面特定装置2は、自車両が駐車される時点において反射面情報を生成して車載通信機1に提供しておいてもよい。その場合、車載通信機1は、取得した反射面情報を記憶部14に格納しておき、携帯端末200からの信号を受信した場合に、記憶部14から反射面情報を読み出せばよい。
The case where the reflection
<位置推定部16の作動について>
位置推定部16は、反射面情報に基づいて、第1到来方向情報に示される到来方向が、直接波に由来して検出された到来方向であるか、反射波に由来して検出された到来方向であるかを識別する。より具体的には、反射面情報を参照し、識別の対象とする到来方向の方位に反射面が存在している場合には、その到来方向を、反射波に由来して検出された到来方向であると判定する。また、到来方向の方位に反射面が存在していない場合には、その到来方向を、直接波に由来して検出された到来方向であると判定する。
<About the operation of the
Based on the reflection surface information, the
直接波に由来して検出された到来方向とは、携帯端末200が存在する方向(つまり端末方向)に相当する。便宜上、直接波に由来して検出された到来方向を直接到来方向と称し、反射波に由来して検出された到来方向を反射到来方向と称する。反射面情報に示される到来方向が複数存在する場合には、それぞれに対して上記識別を実施する。
The arrival direction detected from the direct wave corresponds to the direction in which the
また、位置推定部16は、第2到来方向情報に示される到来方向に対しても、反射面情報に基づいて、その到来方向が直接到来方向であるか反射到来方向であるかを識別する。
Also, the
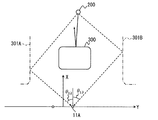
図3は、位置推定部16の作動を説明するための概念図であって、携帯端末200から送信された電波がアレイアンテナ11で受信されるまでの伝搬環境を表している。図中の一点鎖線は、反射面情報に示される反射面301の位置を表している。また、便宜上、電波の送信源である携帯端末200の位置を丸印で表す。
FIG. 3 is a conceptual diagram for explaining the operation of the
この図3に示す状況において、各アレイアンテナ11は、反射面301で反射されて到来した電波(つまり反射波)と、直接到来した電波(直接波)のそれぞれを受信する。実線矢印は、携帯端末200から送信された信号が直接アレイアンテナ11に到達する経路を表しており、破線矢印は、携帯端末200から送信された信号が反射面301で反射されてアレイアンテナ11に到達する経路を表している。
In the situation shown in FIG. 3, each
一例として、第1アレイアンテナ11Aにおける反射波の到来方向をθ11とし、直接波の到来方向をθ12とする。また、第2アレイアンテナ11Bにおける反射波の到来方向をθ21とし、直接波の到来方向をθ22とする。
As an example, the arrival direction of the reflected wave at the
その結果、位置推定部16は、第1到来方向情報として、直接波に由来するθ11と反射波に由来するθ11の2つの到来方向を取得する。また、第2到来方向情報として、直接波に由来するθ21と反射波に由来するθ22の2つの到来方向を取得する。
As a result, the
第1到来方向情報を取得すると、位置推定部16は、反射面情報を参照し、第1アレイアンテナ11Aからみて到来方向θ11の方位に反射面が存在するか否かを判定する。図3においては到来方向θ11の方位に反射面が存在していないため、到来方向θ11を直接到来方向であると判定する。また、位置推定部16は、第1アレイアンテナ11Aからみて到来方向θ12の方位に反射面が存在するか否かを判定する。到来方向θ12の方位に反射面301が存在しているため、到来方向θ12を反射到来方向であると判定する。
When the first arrival direction information is acquired, the
なお、位置推定部16は、記憶部14に格納されている設置位置データに基づいて、第1アレイアンテナ11Aと第2アレイアンテナ11Bの位置を、前述のXY座標系の点として表し、各アレイアンテナ11と反射面との位置関係を、XY座標系で認識すればよい。そして、そのXY座標系において第1アレイアンテナ11Aからみた到来方向θ11の方位や到来方向θ12の方位に反射面301が存在するか否かを判定すればよい。
The
また、位置推定部16は、第2到来方向情報に示される到来方向θ21、θ22のそれぞれに対しても同様に、反射面情報を参照して、到来方向θ11を直接到来方向、到来方向θ12を反射到来方向であると判定する。
Similarly, the
そして、位置推定部16は、第1到来方向情報に示される直接到来方向θ11と第2到来方向情報に示される直接到来方向θ21と、各アレイアンテナ11の設置位置から、三角測量の原理によって、携帯端末200の相対位置を特定する。
Then, the
なお、本実施形態では一例として各アレイアンテナ11に由来する直接到来方向θ11、θ21に基づいて携帯端末200の相対位置を推定する態様とするがこれに限らない。後述する変形例1のように、携帯端末200の相対位置を特定するために反射到来方向を利用してもよい。
In the present embodiment, the relative position of the
<本実施形態の効果>
ここでは図4及び図5を用いて、従来技術における課題について述べ、その後、本実施形態の効果について説明する。図4は、携帯端末200から送信された電波がアレイアンテナ11で受信されるまでの伝搬経路の一例を示す概念図である。図4に示す300は、他車両のボディ等の金属体(すなわち電波反射体)を表しており、400は、人体等の電波を減衰させる物体(電波減衰体とする)を表している。電波減衰体は電波を透過させるものの、その信号強度を低下させる。電波反射体300は、携帯端末200から送信された電波をアレイアンテナ11が存在する方向に反射するような位置及び形状で存在しており、また、電波減衰体400は、携帯端末200とアレイアンテナ11とを結ぶ直線上に存在している。
<Effect of this embodiment>
Here, the problems in the prior art will be described with reference to FIGS. 4 and 5, and then the effects of this embodiment will be described. FIG. 4 is a conceptual diagram illustrating an example of a propagation path until a radio wave transmitted from the
そのような状況において、アレイアンテナ11は、電波反射体300で反射されて到来した電波(つまり反射波)と、電波減衰体400を透過して到来した電波(透過波)のそれぞれを受信する。一例として、電波反射体300からの反射波は、アレイアンテナ11にとって45°の方向から到来し、透過波は、0°の方向から到来するものとする。なお、透過波は、その到来方向は携帯端末200が存在する方向と一致するという観点から、直接波に属するものとする。
In such a situation, the
図5は、図4に示す状況において到来方向推定部13が取得する、探索方位角と合成受信電力との関係を示すグラフである。電波反射体300からの反射波が十分な強度を保ったままアレイアンテナ11で受信された場合、アレイアンテナ11にとって45°方向から到来するため、45°方向において到来方向を検出する。
FIG. 5 is a graph showing the relationship between the search azimuth angle and the combined received power, which is obtained by the arrival
なお、複数回反射された電波は十分に減衰されて、閾値Th以下となるため、無視することができる。つまり、ここでの反射波としては、携帯端末200から送信されてから1回だけ反射されて到来する電波を想定すればよい。
The radio wave reflected a plurality of times is sufficiently attenuated to be equal to or less than the threshold value Th and can be ignored. In other words, the reflected wave here may be a radio wave that arrives after being reflected from the
また、透過波が十分な強度を保ったままアレイアンテナ11で受信された場合、この透過波はアレイアンテナ11にとって0°方向から到来するため、0°方向において到来方向を検出する。
Further, when the transmitted wave is received by the
一般的には、携帯端末200から送信された電波が、反射体で反射されずに、直接アレイアンテナ11で受信された時の到来した電波の合成受信電力は、反射波の合成受信電力よりも大きくなる傾向が強い。しかしながら、直接波であっても、透過波となっていたり、反射波の干渉を受けたりしている場合には、その合成受信電力が、反射波の合成受信電力よりも小さくなることがある。図5は一例として、直接波が透過波となっていることにより、その合成受信電力が反射波の合成受信電力よりも小さくなっている場合を表している。
In general, when the radio wave transmitted from the
つまり、この図5に示すように、合成受信電力が最も大きくなる方向が、直接到来方向とは限らない。したがって、到来方向が複数検出された場合、合成受信電力の大小関係に基づいて、それらの複数の到来方向が直接到来方向を示しているか否かを識別することは困難といえる。そして、反射到来方向を直接到来方向と誤判定してしまった場合には、携帯端末200の位置を実際の位置とは異なる位置に推定してしまう。
That is, as shown in FIG. 5, the direction in which the combined received power is the largest is not always the direct arrival direction. Therefore, when a plurality of arrival directions are detected, it can be said that it is difficult to identify whether or not the plurality of arrival directions directly indicate the arrival directions based on the magnitude relationship of the combined received power. If the reflected arrival direction is erroneously determined as the direct arrival direction, the position of the
このようなことから従来技術においては、携帯端末200から送信された信号が反射されてアレイアンテナ11に到達する可能性が高い環境(いわゆるマルチパス環境)下に自車両が存在する場合には、位置推定精度が低下してしまうといった課題があった。
For this reason, in the conventional technology, when the host vehicle exists in an environment (so-called multipath environment) in which a signal transmitted from the
一方、本実施形態の構成によれば、位置推定部16は、反射面情報に基づいて、到来方向が、直接到来方向であるか反射到来方向であるかを識別する。したがって、反射到来方向を、端末方向に相当する直接到来方向であると誤認識する恐れを低減でき、それに伴って、自車両がマルチパス環境下であっても、より精度よく携帯端末200の位置を推定することができる。
On the other hand, according to the configuration of the present embodiment, the
また、反射面が複数存在し、複数の反射波を受信している場合であっても、反射波と反射面上の点(反射点)との組み合わせは、1対1に対応付けることができる。したがって、反射面(言い換えれば電波反射体)が複数存在することに起因して、位置推定精度が低下することはない。また、次に述べる変形例1や変形例2の概念を本実施形態に導入した態様とすれば、反射面が複数存在するということは、携帯端末200の位置を推定するための情報が増加することになり、より精度よく位置を推定できるようになる。
In addition, even when there are a plurality of reflection surfaces and a plurality of reflection waves are received, combinations of the reflection waves and points on the reflection surface (reflection points) can be associated one-to-one. Therefore, the position estimation accuracy does not deteriorate due to the presence of a plurality of reflecting surfaces (in other words, radio wave reflectors). Further, if the concept of Modification 1 or
以上、本発明の実施形態を説明したが、本発明は上述の実施形態に限定されるものではなく、以降の変形例も本発明の技術的範囲に含まれ、さらに、下記以外にも要旨を逸脱しない範囲内で種々変更して実施することができる。 As mentioned above, although embodiment of this invention was described, this invention is not limited to the above-mentioned embodiment, The following modifications are also contained in the technical scope of this invention, Furthermore, the summary other than the following is also included. Various modifications can be made without departing from the scope.
[変形例1]
以上では、2つのアレイアンテナ11のそれぞれにおける直接到来方向に基づいて携帯端末200の相対位置を推定する態様を例示した。つまり、携帯端末200の相対位置を推定する上で、反射到来方向を利用しない態様を例示したが、これに限らない。この変形例1では、携帯端末200の相対位置を特定するために、反射到来方向を利用する態様を例示する。
[Modification 1]
In the above, the aspect which estimated the relative position of the
この変形例1における位置推定部16は、機能ブロックとして図6に示すように、反射点特定部161と、間接端末方向特定部162を備える。
As shown in FIG. 6 as a functional block, the
反射点特定部161は、反射到来方向と反射面情報とから、携帯端末200から送信された電波がアレイアンテナ11で受信されるまでの過程において反射された位置を特定する。反射点の位置は例えばXY座標系における座標として表されればよい。また、間接端末方向特定部162は、反射点における反射面の角度と反射到来方向とから、反射点からみて携帯端末200が存在する方向(間接端末方向とする)を特定する。
The reflection
この反射点特定部161と間接端末方向特定部162の作動について、図7を用いてより具体的に説明する。図7は、図3と同様に、携帯端末200から送信された電波がアレイアンテナ11で受信されるまでの伝搬環境を表す概念図である。図中の一点鎖線は、反射面情報に示される反射面301の位置を表している。また、実線矢印は携帯端末200から送信された電波が直接第1アレイアンテナ11Aに到達するまでの経路を、破線矢印は携帯端末200から送信された電波が反射面301で反射されて直接第1アレイアンテナ11Aに到達するまでの経路を、それぞれ表している。角度θ11は、第1アレイアンテナ11Aにおける直接到来方向を表しており、角度θ12は、第1アレイアンテナ11Aにおける反射到来方向を表している。また、角度θ3は、反射面301上の反射点302における第1アレイアンテナ11Aの0°方向(ここではY軸)に対する角度を表している。
The operations of the reflection
なお、便宜上、第2アレイアンテナ11Bに関連する部分は省略し、第1アレイアンテナ11Aが受信する電波の到来方向に関わる部分について説明する。もちろん、第2アレイアンテナ11Bについても、以降で述べる概念を適用することができる。
For convenience, portions related to the
図7に示す状況において、反射点特定部161は、XY座標系における第1アレイアンテナ11Aの位置と、反射到来方向θ12と、反射面301を構成する座標群(又は関数)とから、反射点302の位置を特定する。
In the situation shown in FIG. 7, the reflection
次に、間接端末方向特定部162は、反射点特定部161が特定した反射点302における反射面301の接線とY軸との角度θ3を算出する。そして、角度θ3と反射到来方向θ12とから、反射点302から見た携帯端末200が存在する方向(つまり間接端末方向)θ4を特定する。なお、間接端末方向θ4は、反射到来方向θ12に、角度θ3を2倍した値を加えた値となる。つまり、θ4=θ12+2*θ3となる。
Next, the indirect terminal
以上のようにして反射点302の位置、間接端末方向θ4、第1アレイアンテナ11Aの位置、第1アレイアンテナ11Aにおける直接到来方向θ11は何れも既知となる。したがって、反射点302と第1アレイアンテナ11Aの設置位置を結ぶ線分を基線として、三角測量の原理を適用することで、間接端末方向θ4と直接到来方向θ11とから携帯端末200の相対位置を推定することができる。つまり、位置推定部16は、第1アレイアンテナ11Aにおける反射到来方向を利用することで、第2アレイアンテナ11Bにおける直接到来方向(及び反射到来方向)を用いなくても、携帯端末200の相対位置を特定することができる。
As described above, the position of the
従来技術や上述の実施形態においては、三角測量の原理を利用して携帯端末200の相対位置を特定するためには、2つのアレイアンテナ11を必要とする。一方、この変形例1の構成によれば、1つのアレイアンテナ11によって、携帯端末200の位置を推定することができる。
In the prior art and the above-described embodiments, two
したがって、この変形例1の構成によれば、車載通信機1がアレイアンテナ11を1つしか備えていない構成であっても(図8参照)、そのアレイアンテナ11が直接波と反射波を受信できている場合には携帯端末200の位置を推定できるようになる。また、変形例1の構成によれば、複数のアレイアンテナ11を備えているものの、1つのアレイアンテナ11でしか携帯端末200からの電波を受信できていない場合であっても、そのアレイアンテナ11が直接波と反射波を受信できている場合には、携帯端末200の位置を推定できる。
Therefore, according to the configuration of the first modification, even if the in-vehicle communication device 1 has only one array antenna 11 (see FIG. 8), the
さらに、この変形例1の構成によれば、図9に示すように、携帯端末200からの直接波を受信できていない場合であっても、複数の方向からの反射波を受信できている場合には、携帯端末200の相対位置を推定することができる。具体的には、反射点特定部161が、複数の反射到来方向のそれぞれに対応する反射点を特定し、間接端末方向特定部162は、それぞれの反射点に対応する間接端末方向を特定する。そして、複数の反射点と間接端末方向の組み合わせから、三角測量の原理によって携帯端末200の位置を特定する。
Furthermore, according to the configuration of the first modification, as shown in FIG. 9, even when the direct wave from the
なお、携帯端末200からの直接波を受信できない場合とは、携帯端末200とアレイアンテナ11とを結ぶ直線上に電波反射体300等が存在する場合や、直接波の信号強度を十分に減衰しうる電波減衰体400が存在する場合等である。図9における301A及び301Bは、反射面情報に示されている反射面を表しており、θ12及びθ13は、反射到来方向を表している。
In addition, the case where the direct wave from the
[変形例2]
上記変形例1では、第1アレイアンテナ11Aにおける直接到来方向と、第1アレイアンテナ11Aにおける反射到来方向から定まる反射点302にとっての間接到来方向とから、携帯端末200の相対位置を推定する態様を例示したが、これに限らない。
[Modification 2]
In the first modification, the relative position of the
第1アレイアンテナ11Aにおける直接到来方向と、第2アレイアンテナ11Bにおける反射到来方向から定まる反射点にとっての間接到来方向とから、携帯端末200の相対位置を推定してもよい。また、その逆に、第2アレイアンテナ11Bにおける直接到来方向と、第1アレイアンテナ11Aにおける反射到来方向から定まる反射点にとっての間接到来方向とから、携帯端末200の相対位置を推定してもよい。
The relative position of the
さらに、第1アレイアンテナ11Aにおける反射到来方向から定まる反射点にとっての間接到来方向と、第2アレイアンテナ11Bにおける反射到来方向から定まる反射点にとっての間接到来方向とに基づいて、携帯端末200の相対位置を推定してもよい。
Further, based on the indirect arrival direction for the reflection point determined from the reflection arrival direction in the
また、第1アレイアンテナ11Aにおける直接到来方向と第2アレイアンテナ11Bにおける直接到来方向とから定まる携帯端末200の位置を、任意の反射点からみた携帯端末200が存在する方向に基づいて補正してもよい。
Further, the position of the
1000 位置推定システム、100 車載システム、1 車載通信機(位置推定装置)、11 アレイアンテナ、11A 第1アレイアンテナ、11B 第2アレイアンテナ、12 受信部、12A 第1受信部、12B 第2受信部、13 到来方向推定部、13A 第1到来方向推定部、13B 第2到来方向推定部、14 記憶部、15 反射面情報取得部、16 位置推定部、131A 複素重み付与部、132A 重み付け指令部、133A 相関演算部、134A 到来方向取得部、161 反射点特定部、162 間接端末方向特定部、2 反射面特定装置(反射面位置特定部)、200 携帯端末 1000 position estimation system, 100 in-vehicle system, 1 in-vehicle communication device (position estimation device), 11 array antenna, 11A first array antenna, 11B second array antenna, 12 receiving unit, 12A first receiving unit, 12B second receiving unit , 13 arrival direction estimation unit, 13A first arrival direction estimation unit, 13B second arrival direction estimation unit, 14 storage unit, 15 reflecting surface information acquisition unit, 16 position estimation unit, 131A complex weight assignment unit, 132A weighting command unit, 133A Correlation calculation unit, 134A Arrival direction acquisition unit, 161 Reflection point specification unit, 162 Indirect terminal direction specification unit, 2 Reflection surface specification device (reflection surface position specification unit), 200 Mobile terminal
Claims (6)
前記車両のユーザによって携帯される携帯端末からの電波を受信する複数のアンテナ素子を備えるアレイアンテナ(11、11A、11B)と、
前記アレイアンテナが受信した電波の到来方向を推定する到来方向推定部(13、13A、13B)と、
前記到来方向推定部の推定結果に基づいて、前記車両に対する前記携帯端末の位置を推定する位置推定部(16)と、
前記車両の周辺の所定範囲に存在する物体を検出し、その検出した物体の位置に基づいて、前記携帯端末からの電波を反射しうる面である反射面の、前記車両に対する位置及び角度を特定する反射面位置特定部(2)と、を備え、
前記位置推定部は、
前記到来方向推定部が推定した前記到来方向に、前記反射面位置特定部によって特定された前記反射面が存在するか否かを判定し、前記反射面が存在しない方向となっている前記到来方向である直接到来方向が存在する場合には、当該直接到来方向に基づいて前記車両に対する前記携帯端末の位置を推定することを特徴とする位置推定装置。 Mounted on the vehicle,
An array antenna (11, 11A, 11B) comprising a plurality of antenna elements for receiving radio waves from a mobile terminal carried by a user of the vehicle;
An arrival direction estimation unit (13, 13A, 13B) for estimating an arrival direction of radio waves received by the array antenna;
A position estimation unit (16) for estimating a position of the mobile terminal with respect to the vehicle based on an estimation result of the arrival direction estimation unit;
An object existing in a predetermined range around the vehicle is detected, and a position and an angle of the reflection surface, which is a surface that can reflect radio waves from the mobile terminal, are identified based on the position of the detected object. And a reflecting surface position specifying part (2),
The position estimation unit
It is determined whether the reflection surface specified by the reflection surface position specification unit exists in the arrival direction estimated by the arrival direction estimation unit, and the arrival direction is a direction in which the reflection surface does not exist When there is a direct arrival direction, the position estimation device estimates the position of the mobile terminal with respect to the vehicle based on the direct arrival direction.
前記位置推定部は、前記到来方向推定部が推定した前記到来方向に前記反射面が存在する場合には、その到来方向を、前記携帯端末から送信された電波が反射されて到来している方向である反射到来方向として認識し、
前記反射到来方向と前記反射面の位置とから、前記携帯端末から送信された電波が前記アレイアンテナで受信されるまでの過程において反射された位置である反射点を特定する反射点特定部(161)と、
前記反射点特定部が特定した前記反射点における前記反射面の角度と、前記反射到来方向とに基づいて、前記反射点からみて前記携帯端末が存在する方向である間接端末方向を特定する間接端末方向特定部(162)と、を備え、
前記位置推定部は、前記反射点特定部が特定した前記反射点の位置と、前記間接端末方向特定部が特定した前記間接端末方向とに基づいて、前記携帯端末の位置を推定できることを特徴とする位置推定装置。 In claim 1,
In the case where the reflection surface is present in the arrival direction estimated by the arrival direction estimation unit, the position estimation unit indicates the arrival direction of the radio wave transmitted from the mobile terminal and is received Is recognized as the reflection arrival direction,
A reflection point identification unit (161) that identifies a reflection point that is a position reflected from the reflection arrival direction and the position of the reflection surface until the radio wave transmitted from the mobile terminal is received by the array antenna. )When,
Based on the angle of the reflection surface at the reflection point specified by the reflection point specifying unit and the reflection arrival direction, the indirect terminal that specifies the indirect terminal direction that is the direction in which the mobile terminal exists as seen from the reflection point A direction specifying part (162),
The position estimating unit can estimate the position of the mobile terminal based on the position of the reflection point specified by the reflection point specifying unit and the indirect terminal direction specified by the indirect terminal direction specifying unit. Position estimation device.
前記位置推定部は、前記アレイアンテナの前記車両における設置位置と、前記アレイアンテナにおける前記直接到来方向と、前記反射点の位置と、前記間接端末方向特定部が特定した前記間接端末方向とに基づいて前記携帯端末の位置を推定することを特徴とする位置推定装置。 In claim 2,
The position estimating unit is based on the installation position of the array antenna in the vehicle, the direct arrival direction of the array antenna, the position of the reflection point, and the indirect terminal direction specified by the indirect terminal direction specifying unit. And estimating the position of the portable terminal.
前記アレイアンテナとして、それぞれ異なる位置に設けられている第1アレイアンテナ及び第2アレイアンテナを備え、
前記到来方向推定部は、前記第1アレイアンテナ及び前記第2アレイアンテナのそれぞれにおいて受信されている電波の到来方向を推定し、
前記位置推定部は、
前記第1アレイアンテナにおける前記直接到来方向と、前記第2アレイアンテナにおける前記直接到来方向を取得できている場合には、それら各前記アレイアンテナにおける当該直接到来方向に基づいて前記車両に対する前記携帯端末の位置を推定することを特徴とする位置推定装置。 In claim 2 or 3,
The array antenna includes a first array antenna and a second array antenna provided at different positions,
The arrival direction estimation unit estimates an arrival direction of radio waves received at each of the first array antenna and the second array antenna,
The position estimation unit
When the direct arrival direction in the first array antenna and the direct arrival direction in the second array antenna can be acquired, the mobile terminal for the vehicle based on the direct arrival direction in each of the array antennas A position estimation device characterized by estimating the position of the.
前記第1アレイアンテナ及び前記第2アレイアンテナの何れか一方における前記直接到来方向が取得できておらず、かつ、前記第1アレイアンテナ及び前記第2アレイアンテナの少なくとも何れか一方において前記反射到来方向を取得できている場合には、
前記反射点特定部は、その取得できている前記反射到来方向から前記反射点を特定し、
前記間接端末方向特定部は、前記反射点特定部が特定した前記反射点における前記反射面の角度と前記反射到来方向とに基づいて前記間接端末方向を特定し、
前記位置推定部は、前記直接到来方向が取得できているほうの前記アレイアンテナの設置位置と、その取得できている前記直接到来方向と、前記反射点の位置と、前記反射点にとっての前記間接端末方向とに基づいて、前記携帯端末の位置を推定することを特徴とする位置推定装置。 In claim 4,
The direct arrival direction in any one of the first array antenna and the second array antenna cannot be obtained, and the reflection arrival direction in at least one of the first array antenna and the second array antenna If you can get
The reflection point specifying unit specifies the reflection point from the reflection arrival direction that has been acquired,
The indirect terminal direction specifying unit specifies the indirect terminal direction based on the angle of the reflection surface at the reflection point specified by the reflection point specifying unit and the reflection arrival direction,
The position estimation unit includes an installation position of the array antenna from which the direct arrival direction can be obtained, the direct arrival direction from which the direct arrival direction is obtained, a position of the reflection point, and the indirect to the reflection point. A position estimation device that estimates the position of the mobile terminal based on a terminal direction.
複数の前記反射到来方向を取得できている場合、
前記反射点特定部は、それぞれの前記反射到来方向に対応する前記反射点を特定し、
前記間接端末方向特定部は、前記反射点特定部が特定した前記反射点のそれぞれに対応する前記間接端末方向を特定し、
前記位置推定部は、複数の前記反射点の位置と、各前記反射点に対応する前記間接端末方向に基づいて、前記携帯端末の位置を推定することを特徴とする位置推定装置。 In any one of Claim 2 to 4,
When a plurality of reflection arrival directions can be acquired,
The reflection point specifying unit specifies the reflection point corresponding to each of the reflection arrival directions,
The indirect terminal direction specifying unit specifies the indirect terminal direction corresponding to each of the reflection points specified by the reflection point specifying unit,
The said position estimation part estimates the position of the said portable terminal based on the position of the said several reflective point, and the said indirect terminal direction corresponding to each said reflective point, The position estimation apparatus characterized by the above-mentioned.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015080279A JP2016200478A (en) | 2015-04-09 | 2015-04-09 | Position estimation device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015080279A JP2016200478A (en) | 2015-04-09 | 2015-04-09 | Position estimation device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2016200478A true JP2016200478A (en) | 2016-12-01 |
Family
ID=57424030
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015080279A Pending JP2016200478A (en) | 2015-04-09 | 2015-04-09 | Position estimation device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2016200478A (en) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112817015A (en) * | 2021-01-04 | 2021-05-18 | 上海交通大学 | Method and system for estimating position of reflecting surface by utilizing GNSS multipath reflection signals |
| US11027701B2 (en) | 2017-02-28 | 2021-06-08 | Soken, Inc. | Location determination system |
| JP2021128076A (en) * | 2020-02-14 | 2021-09-02 | 株式会社東海理化電機製作所 | Communication apparatus, information processing method, and program |
| WO2021171824A1 (en) * | 2020-02-26 | 2021-09-02 | Denso International America, Inc. | Ultra-high frequency low energy based phone as a key access to a vehicle using two-way communication for multipath mitigation |
| WO2021261818A1 (en) * | 2020-06-25 | 2021-12-30 | 삼성전자 주식회사 | Location determination method and electronic device for supporting same |
| JP2022527103A (en) * | 2019-03-29 | 2022-05-30 | 株式会社デンソー | Passive entry / passive start system that implements the MUSIC algorithm based on the arrival angle determination of the signal received via the circularly polarized antenna. |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01292277A (en) * | 1988-05-20 | 1989-11-24 | Nippon Telegr & Teleph Corp <Ntt> | System for detecting position of moving body |
| US20050280538A1 (en) * | 2004-06-22 | 2005-12-22 | Omron Corporation | Tag communication apparatus, control method for tag communication apparatus, computer readable medium for tag communication control and tag communication control system |
| JP2006170698A (en) * | 2004-12-14 | 2006-06-29 | Matsushita Electric Ind Co Ltd | Device for estimating azimuth of radio station, device for estimating azimuth of radio station and emitting radio wave, and method of estimating azimuth of radio station |
| JP2008122127A (en) * | 2006-11-09 | 2008-05-29 | Mitsubishi Electric Corp | Target position locating apparatus |
| JP2013113740A (en) * | 2011-11-29 | 2013-06-10 | Secom Co Ltd | Azimuth detection device of radio equipment |
| JP2014159986A (en) * | 2013-02-19 | 2014-09-04 | Mitsubishi Electric Corp | Position detector |
-
2015
- 2015-04-09 JP JP2015080279A patent/JP2016200478A/en active Pending
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01292277A (en) * | 1988-05-20 | 1989-11-24 | Nippon Telegr & Teleph Corp <Ntt> | System for detecting position of moving body |
| US20050280538A1 (en) * | 2004-06-22 | 2005-12-22 | Omron Corporation | Tag communication apparatus, control method for tag communication apparatus, computer readable medium for tag communication control and tag communication control system |
| JP2006170698A (en) * | 2004-12-14 | 2006-06-29 | Matsushita Electric Ind Co Ltd | Device for estimating azimuth of radio station, device for estimating azimuth of radio station and emitting radio wave, and method of estimating azimuth of radio station |
| JP2008122127A (en) * | 2006-11-09 | 2008-05-29 | Mitsubishi Electric Corp | Target position locating apparatus |
| JP2013113740A (en) * | 2011-11-29 | 2013-06-10 | Secom Co Ltd | Azimuth detection device of radio equipment |
| JP2014159986A (en) * | 2013-02-19 | 2014-09-04 | Mitsubishi Electric Corp | Position detector |
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11027701B2 (en) | 2017-02-28 | 2021-06-08 | Soken, Inc. | Location determination system |
| JP2022527103A (en) * | 2019-03-29 | 2022-05-30 | 株式会社デンソー | Passive entry / passive start system that implements the MUSIC algorithm based on the arrival angle determination of the signal received via the circularly polarized antenna. |
| JP7226585B2 (en) | 2019-03-29 | 2023-02-21 | 株式会社デンソー | A Passive Entry/Passive Start System Implementing the MUSIC Algorithm Based on Angle of Arrival Determination of Signals Received Through a Circularly Polarized Antenna |
| JP2021128076A (en) * | 2020-02-14 | 2021-09-02 | 株式会社東海理化電機製作所 | Communication apparatus, information processing method, and program |
| JP7366791B2 (en) | 2020-02-14 | 2023-10-23 | 株式会社東海理化電機製作所 | Communication device, information processing method, and program |
| WO2021171824A1 (en) * | 2020-02-26 | 2021-09-02 | Denso International America, Inc. | Ultra-high frequency low energy based phone as a key access to a vehicle using two-way communication for multipath mitigation |
| JP2023523505A (en) * | 2020-02-26 | 2023-06-06 | 株式会社デンソー | Phone-as-a-Key Access to Ultra-High-Frequency Low-Energy Based Vehicles Using Two-Way Communication for Multipath Mitigation |
| JP7311052B2 (en) | 2020-02-26 | 2023-07-19 | 株式会社デンソー | Phone-as-a-Key Access to Ultra-High-Frequency Low-Energy Based Vehicles Using Two-Way Communication for Multipath Mitigation |
| WO2021261818A1 (en) * | 2020-06-25 | 2021-12-30 | 삼성전자 주식회사 | Location determination method and electronic device for supporting same |
| CN112817015A (en) * | 2021-01-04 | 2021-05-18 | 上海交通大学 | Method and system for estimating position of reflecting surface by utilizing GNSS multipath reflection signals |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2016200478A (en) | Position estimation device | |
| TWI407132B (en) | Positioning method and wireless communication system using the same | |
| JP6471645B2 (en) | Position estimation device | |
| US8818419B2 (en) | Method and system for device positioning utilizing distributed transceivers with array processing | |
| US20190310358A1 (en) | Radar apparatus and antenna apparatus therefor | |
| EP2789181B1 (en) | Method, apparatus, and computer program product for secure distance bounding based on direction measurement | |
| US8869588B2 (en) | Ultrasonic positioning system with reverberation and flight time compensation | |
| JP2008008887A (en) | Signal arrival angle determination method, signal arrival angle determination device, and system for determining arrival angle of signal | |
| CN208956308U (en) | Distinguishable sound bearing is to promote the audio signal reception device of reception | |
| US11092663B2 (en) | Apparatus and method for representing user information received by an antenna apparatus with a directional characteristic | |
| CN102016623A (en) | Direction finding method and device | |
| WO2010038359A1 (en) | Radio arrival direction estimation device and radio arrival direction estimation method | |
| KR20140109760A (en) | Active retrodirective wireless communication apparatus | |
| JP7188448B2 (en) | Antenna device, moving object, and target discrimination method | |
| WO2018233943A1 (en) | Method and system for determining a position | |
| JP7282385B2 (en) | Radio wave monitoring device and radio wave monitoring method | |
| EP2259445B1 (en) | Radio wave control apparatus, radio wave control system, and radio wave control method | |
| JP2008045954A (en) | Direction detection device | |
| JP2016061686A (en) | Incoming direction estimation apparatus, position estimation apparatus, and position estimation system | |
| JP6538366B2 (en) | Direction of arrival estimation device | |
| US20140162691A1 (en) | Positioning Method and Wireless Communication System Using the Same | |
| JP2016166790A (en) | Radar device and object detection method of radar device | |
| TWI649576B (en) | Radio device capable of resolving sound source orientation to improve receiving effect | |
| JP4645061B2 (en) | Wireless tag communication device | |
| JP4816320B2 (en) | Wireless communication device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20171106 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20180822 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20180904 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20190305 |