JP2016013877A - Control system for elevator - Google Patents
Control system for elevator Download PDFInfo
- Publication number
- JP2016013877A JP2016013877A JP2014135566A JP2014135566A JP2016013877A JP 2016013877 A JP2016013877 A JP 2016013877A JP 2014135566 A JP2014135566 A JP 2014135566A JP 2014135566 A JP2014135566 A JP 2014135566A JP 2016013877 A JP2016013877 A JP 2016013877A
- Authority
- JP
- Japan
- Prior art keywords
- elevator
- overtaking
- departure
- speed
- speed difference
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Abstract
Description
本発明は、エレベータの制御システムに関し、より詳細には、同一昇降路内に併設された複数台のエレベータの運行制御システムに関する。 The present invention relates to an elevator control system, and more particularly to an operation control system for a plurality of elevators provided in the same hoistway.
近年の技術の発展や建物の高層化に伴い、エレベータの定格速度が高速化されている。しかし、超高層ビルや複合施設等では、設置されるエレベータの台数が多くなるため、費用や消費エネルギーを考慮して、全てのエレベータを高速化するわけではない。そのため、建物内に併設されたエレベータが必ずしも同じ定格速度であるとは限らない。 With recent technological developments and higher building heights, the rated speed of elevators has been increased. However, in skyscrapers and complex facilities, the number of elevators to be installed increases. Therefore, not all elevators are accelerated in consideration of cost and energy consumption. Therefore, the elevators installed in the building do not always have the same rated speed.
また、建物内に複数台のエレベータを併設する場合、個々のエレベータの昇降路を壁等で囲んでエレベータごとに昇降路を設けると、エレベータの上下動による風切り音や振動が大きくなることがある。このため、建物内に複数台のエレベータを併設する場合には、エレベータの上下動により発生する風を逃がすために、個々のエレベータの昇降路を壁等で囲まないこと(すなわち、1つの昇降路に複数台のエレベータを配置し、エレベータの間を壁等で区切らないこと)が多い。しかし、エレベータが高速になればなるほど、1つの昇降路内でエレベータが並走したり追越したりする場合やエレベータが互いに逆方向に移動している場合には、騒音や振動が大きくなってしまう。このため、同一昇降路内に複数台のエレベータを設置する場合には、騒音や振動への対策が必要である。 In addition, when multiple elevators are installed in a building, if the hoistway of each elevator is enclosed by a wall or the like and a hoistway is provided for each elevator, wind noise and vibration due to the vertical movement of the elevator may increase. . For this reason, when installing a plurality of elevators in a building, in order to escape the wind generated by the vertical movement of the elevator, do not enclose the hoistway of each elevator with a wall or the like (that is, one hoistway) It is often the case that a plurality of elevators are arranged in the elevator and the elevators are not separated by walls or the like. However, the higher the speed of the elevator, the greater the noise and vibration when the elevators run parallel or pass in one hoistway or when the elevators are moving in opposite directions. For this reason, when installing a plurality of elevators in the same hoistway, it is necessary to take measures against noise and vibration.
特許文献1には、騒音や振動の対策として、エレベータのすれ違い時の風圧による横揺れを防止するエレベータ群管理制御装置が記載されている。特許文献1に記載のエレベータ群管理制御装置は、かご内に乗客が乗っている状態で、このかごと隣接するかごが規定速度ですれ違うことを予め検出すると、すれ違うまでの時間に基づいて、少なくとも一方のかごを規定速度よりも低速で走行させる。 Patent Document 1 describes an elevator group management control device that prevents rolling due to wind pressure when an elevator passes by as a countermeasure against noise and vibration. When the elevator group management control device described in Patent Document 1 detects in advance that a car adjacent to this car passes at a specified speed in a state where passengers are in the car, at least based on the time until the car passes, One car is run at a speed lower than the specified speed.
特許文献2には、2台のかごの走行によって発生する風音の増大を防止するエレベータの制御装置が記載されている。特許文献2に記載のエレベータの制御装置は、同一昇降路内に定格速度の異なる2台のエレベータが併設され、高速のかごが低速のかごを追越すとき、低速のかごの速度を遅くすることにより、2台のかごの並走する時間を短くして、2台のかごの並走に伴う風音の増大を防止する。
特許文献3には、風音発生を防止するために、同一昇降路内に並設されたかごの一方の出発を阻止するエレベータの運転装置が記載されている。特許文献3に記載のエレベータの運転装置は、並設されたかごの出発までの時間差が所定値未満で、運行方向が同方向のとき、運行方向に対して前方のかご及び後方のかごの順に出発順を決定し、この出発順に基づいて出発を阻止するかごを設定する。
定格速度が異なる複数台のエレベータ(かご)の昇降路が壁等で区切られずに併設されている場合(すなわち、同一昇降路内に、定格速度が異なる複数台のエレベータが設置されている場合)には、定格速度の速いエレベータが定格速度の遅いエレベータを追越す際の速度差が大きいと、エレベータの騒音や振動が大きくなってしまうという課題がある。エレベータの定格速度が高速化されるに従ってこのような騒音や振動はますます大きくなるが、従来の技術では、騒音や振動を低減するのにエレベータの追越し時の速度差を考慮しておらず、上記の課題が解決されていない。また、エレベータの騒音や振動を低減する方法として、例えば特許文献2のようにかごの速度を遅くするのは、定格速度が高速化された高速エレベータでは好ましくなく、エレベータの走行中に速度パターンを変えることになり消費エネルギーを増やす点からも好ましくない。
When multiple elevator (car) hoistways with different rated speeds are installed without being separated by walls, etc. (that is, when multiple elevators with different rated speeds are installed in the same hoistway) However, there is a problem that noise and vibration of the elevator increase if the speed difference when an elevator with a high rated speed passes an elevator with a low rated speed is large. Such noise and vibration will increase as the rated speed of the elevator increases, but the conventional technology does not consider the speed difference when overtaking the elevator to reduce the noise and vibration. The above problems have not been solved. Further, as a method of reducing the noise and vibration of the elevator, it is not preferable to reduce the speed of the car as in
本発明の目的は、エレベータの追越し時の速度差を考慮してエレベータの騒音や振動を低減することができるエレベータの制御システムを提供することである。 An object of the present invention is to provide an elevator control system capable of reducing the noise and vibration of an elevator in consideration of a speed difference during overtaking of the elevator.
本発明によるエレベータの制御システムは、次のような特徴を備える。同一昇降路内に定格速度が異なる複数台のエレベータが設置されているエレベータ装置のエレベータの制御システムにおいて、パラメータ設定部と、到着予測時刻算出部と、追越し予測検出部と、追越し速度差算出部と、出発抑制管理部とを有し、各時刻における前記エレベータの位置、速度及び進行方向を運行情報として前記エレベータから受信する群管理制御部を備える。前記パラメータ設定部は、前記エレベータの移動時間と速度との関係を予め定めた速度パターンと、予め定めた規定速度差と、前記エレベータに設定した出発の優先度とを格納する。前記到着予測時刻算出部は、前記運行情報と前記速度パターンとを用いて、前記エレベータの次の停止階への到着予測時刻を算出する。前記追越し予測検出部は、前記到着予想時刻と前記運行情報と前記速度パターンとを用いて、前記同一昇降路内で前記エレベータ間で追越しが発生するか否かを求め、追越しが発生する場合には追越しが発生する時刻と追越しが発生する位置とを求める。前記追越し速度差算出部は、前記追越しが発生する時刻と前記運行情報と前記速度パターンとを用いて、追越しが発生する前記エレベータ間の前記追越しが発生する時刻における速度の差を、追越し速度差として求める。前記出発抑制管理部は、前記追越し速度差が前記規定速度差よりも大きい場合は、追越しが発生する前記エレベータのうち前記出発の優先度が低い前記エレベータの出発を遅らせる。 The elevator control system according to the present invention has the following features. In an elevator control system for an elevator apparatus in which a plurality of elevators with different rated speeds are installed in the same hoistway, a parameter setting unit, an estimated arrival time calculation unit, an overtaking prediction detection unit, and an overtaking speed difference calculation unit And a departure suppression management unit, and a group management control unit that receives the position, speed, and traveling direction of the elevator at each time as operation information from the elevator. The parameter setting unit stores a speed pattern in which a relationship between the travel time and speed of the elevator is predetermined, a predetermined speed difference, and a departure priority set in the elevator. The predicted arrival time calculation unit calculates a predicted arrival time for the next stop floor of the elevator using the operation information and the speed pattern. The overtaking prediction detection unit obtains whether or not overtaking occurs between the elevators in the same hoistway using the estimated arrival time, the operation information, and the speed pattern, and when overtaking occurs. Finds the time when overtaking occurs and the position where overtaking occurs. The overtaking speed difference calculation unit uses the time at which the overtaking occurs, the operation information, and the speed pattern to calculate a difference in speed at the time at which the overtaking occurs between the elevators where overtaking occurs. Asking. When the overtaking speed difference is larger than the specified speed difference, the departure suppression management unit delays the departure of the elevator having a low starting priority among the elevators in which overtaking occurs.
本発明によるエレベータの制御システムは、エレベータの追越し時の速度差を考慮してエレベータの騒音や振動を低減することができる。 The elevator control system according to the present invention can reduce the noise and vibration of the elevator in consideration of the speed difference during overtaking of the elevator.
本発明によるエレベータの制御システムは、定格速度が異なる複数台のエレベータ(かご)の昇降路が壁等で区切られずに併設されているエレベータ装置(すなわち、同一昇降路内に、定格速度が異なる複数台のエレベータが設置されているエレベータ装置)において、定格速度の速いエレベータが定格速度の遅いエレベータを予め定めた規定速度差以上で追越さないように、一方のエレベータの出発を抑制する(遅らせる)ことを主要な特徴とする。 The elevator control system according to the present invention includes an elevator apparatus in which hoistways of a plurality of elevators (cars) having different rated speeds are provided without being separated by walls or the like (that is, a plurality of elevators having different rated speeds in the same hoistway). Elevator with a higher rated speed in an elevator system with one elevator installed) suppresses (delays) the departure of one elevator so that an elevator with a lower rated speed does not pass an elevator with a lower rated speed beyond a predetermined specified speed difference ) Is the main feature.
本発明によるエレベータの制御システムは、2台のエレベータの間で追越しが発生する場合に、追越し速度差(一方のエレベータが他方のエレベータを追越す際の両者の速度差)が規定速度差以上となることを防ぐことができるため、エレベータ(かご)の追越しによって生じる騒音や振動を防ぐことができるという利点がある。 In the elevator control system according to the present invention, when overtaking occurs between two elevators, the overtaking speed difference (the difference between the speeds when one elevator overtakes the other elevator) is greater than the specified speed difference. Therefore, there is an advantage that it is possible to prevent noise and vibration caused by passing an elevator (car).
また、エレベータの速度を変更するのではなくエレベータの出発を抑制するため、エレベータの速度パターンを増やすことなく騒音や振動を軽減することができるという利点もある。エレベータの走行中に速度パターンを変えると、急な加減速によりエネルギーを消費する。本発明では、エレベータの速度パターンを変えないため、消費電力を増やすことなく騒音や振動を軽減することができる。 Further, since the departure of the elevator is suppressed rather than changing the speed of the elevator, there is an advantage that noise and vibration can be reduced without increasing the speed pattern of the elevator. If the speed pattern is changed while the elevator is running, energy is consumed by sudden acceleration / deceleration. In the present invention, since the elevator speed pattern is not changed, noise and vibration can be reduced without increasing power consumption.
以下、図面を参照して、本発明の実施例によるエレベータの制御システムを説明する。 Hereinafter, an elevator control system according to an embodiment of the present invention will be described with reference to the drawings.
図1は、同一昇降路内に定格速度が異なる複数台のエレベータが設置されているエレベータ装置において、エレベータとその停止階を模式的に示す図である。図1には、一例として、4台のエレベータ1a〜1dを示している。エレベータ1aとエレベータ1bは、同一昇降路内に設置されており、エレベータ1aとエレベータ1bの間は壁等で区切られていない。また、エレベータ1cとエレベータ1dは、同一昇降路内に設置されており、エレベータ1cとエレベータ1dの間は壁等で区切られていない。
FIG. 1 is a diagram schematically illustrating an elevator and its stop floor in an elevator apparatus in which a plurality of elevators having different rated speeds are installed in the same hoistway. FIG. 1 shows four
エレベータ1aと1cは、定格速度がV1であり、エレベータ1bと1dは、定格速度がV2である。速度V1は、速度V2よりも大きい(V1>V2)。すなわち、エレベータ1aと1cは、定格速度がV1の高速エレベータであり、エレベータ1bと1dは、定格速度がV2で高速エレベータ1a、1cよりも遅い一般エレベータである。
図1において、黒丸は、エレベータ1a〜1dの停止階を示している。すなわち、高速エレベータ1a、1cは、地下2階(B2階)、地下1階(B1階)、1階、110階、及び118〜120階に停止し、一般エレベータ1b、1dは、地下2階(B2階)、地下1階(B1階)、1階、及び118〜120階に停止する。
In FIG. 1, black circles indicate the stop floors of the
なお、図1に示した構成は一例であり、図1に示した構成以外の構成についても、本発明を適用することができ、本発明が奏する効果を得ることができる。 The configuration illustrated in FIG. 1 is an example, and the present invention can be applied to configurations other than the configuration illustrated in FIG. 1, and the effects exhibited by the present invention can be obtained.
図2は、本発明の実施例によるエレベータの制御システムの概略構成を示すブロック図である。本発明によるエレベータの制御システムは、高速エレベータ1a、1cと、一般エレベータ1b、1dと、かご制御部20a〜20dと、群管理制御部24と、ホール呼び部25と、入出力制御部28を備える。
FIG. 2 is a block diagram showing a schematic configuration of an elevator control system according to an embodiment of the present invention. The elevator control system according to the present invention includes high-
高速エレベータ1aと一般エレベータ1bは、昇降路26内に併設されており、互いの間は壁等で区切られていない。高速エレベータ1cと一般エレベータ1dは、昇降路27内に併設されており、互いの間は壁等で区切られていない。なお、昇降路26と昇降路27の間は、壁等で区切られている。
The high-
高速エレベータ1aは、高速エレベータ1aのかごを制御するかご制御部20aに接続されている。一般エレベータ1bは、一般エレベータ1bのかごを制御するかご制御部20bに接続されている。高速エレベータ1cは、高速エレベータ1cのかごを制御するかご制御部20cに接続されている。一般エレベータ1dは、一般エレベータ1dのかごを制御するかご制御部20dに接続されている。
The
かご制御部20a〜20dは、かご状態送信部21a〜21dと出発抑制指令部22a〜22dとをそれぞれ備え、エレベータ1a〜1dをそれぞれ制御する。かご制御部20a〜20dは、入出力制御部28を介して、群管理制御部24に接続される。
The
かご状態送信部21a〜21dは、適宜、エレベータ1a〜1dからエレベータ1a〜1dの運行情報を受信し、受信した運行情報を入出力制御部28を介して群管理制御部24に送信する。運行情報には、各時刻におけるエレベータ(かご)の位置(走行方向における位置)、速度及び進行方向等が含まれる。但し、運行情報は、これらの情報だけに限られず、これら以外の情報を含めることができる。
The car
出発抑制指令部22a〜22dは、エレベータ1a〜1dのかごの出発を抑制する機能を管理する。出発抑制指令部22a〜22dは、入出力制御部28からかごの出発を抑制する指令(出発抑制指令)を受け取ると、それぞれのエレベータ1a〜1dに出発抑制指令を送信し、エレベータ1a〜1dのかごの出発を抑制する(遅らせる)。
The departure
出発抑制指令を受信したエレベータ1a〜1dは、例えば戸開状態で、停止した階で出発を待機する。待機している間、利用者に対して待機理由を告げるアナウンスを行ってもよい。出発の待機は、戸閉状態で行ってもよい。
The
入出力制御部28は、かご制御部20a〜20dと群管理制御部24とを接続し、これらの間で情報を送受信する。また、ホール呼び部25に接続され、ホール呼び部25からの情報(後述するホール呼び情報)を受信し、この情報をかご制御部20a〜20dと群管理制御部24に送信する。
The input /
群管理制御部24は、入出力管理部11、パラメータ設定部12、及び出発抑制制御部13を備え、入出力制御部28とかご制御部20a〜20dを介して、4台のエレベータ1a〜1dの運行を制御する。
The group
入出力管理部11は、出発抑制制御部13と入出力制御部28を接続し、群管理制御部24の入出力制御部28に対する入出力を管理する。
The input /
パラメータ設定部12は、かごの追越しが発生しても騒音や振動が問題とならない規定速度差と、群管理制御部24に接続されているエレベータ1a〜1dについての情報(エレベータ情報)を格納する。エレベータ情報には、群管理制御部24に接続されているエレベータ1a〜1dの台数、階床数、階高、行程、設置位置(同一昇降路内にどのエレベータが設置されているか)、それぞれの速度パターン、及びそれぞれの定格速度等が含まれる。規定速度差とエレベータ情報は、予めパラメータ設定部12に設定しておく。パラメータ設定部12は、格納している規定速度差とエレベータ情報を、出発抑制制御部13に送信する。
The
規定速度差とは、かごの追越し速度差が規定速度差よりも大きいと騒音や振動が問題となるような追越し速度差のことである。すなわち、かごの追越し速度差が規定速度差以下であると、騒音や振動が問題とならない。規定速度差は、実機試験やシミュレーション等により予め定めることができ、昇降路の構造、かごの構造、及び定格速度等のエレベータのスペックや設置環境に応じて変わる値である。また、一般的に、問題となる騒音は音圧で例えば45dBであり、問題となる振動は例えば8Galであるが、問題となる騒音や振動の値は、エレベータのスペックや設置環境に応じて変わる。 The specified speed difference is an overtaking speed difference in which noise and vibration become a problem when the overtaking speed difference of the car is larger than the specified speed difference. That is, if the overtaking speed difference of the car is equal to or less than the specified speed difference, noise and vibration are not a problem. The specified speed difference can be determined in advance by actual machine tests, simulations, and the like, and is a value that varies depending on the elevator specifications such as the hoistway structure, the car structure, and the rated speed, and the installation environment. In general, the noise in question is, for example, 45 dB in terms of sound pressure, and the vibration in question is, for example, 8 Gal. However, the value of the noise or vibration in question varies depending on the specifications of the elevator and the installation environment. .
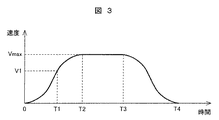
図3は、エレベータの速度パターンの一例を模式的に示す図である。速度パターンとは、エレベータ(かご)の出発階から出発後の移動時間と速度との関係を、エレベータごとに予め定めたものである。図3に示した速度パターンでは、エレベータは、出発階から出発して時間T1後に速度V1に達するように加速し、時間T2後に最大速度Vmaxに達し、時間T3後に減速を開始して、時間T4後に停止階に到着して停止する。 FIG. 3 is a diagram schematically illustrating an example of an elevator speed pattern. The speed pattern is obtained by predetermining the relationship between the travel time after departure from the departure floor of the elevator (car) and the speed for each elevator. In the speed pattern shown in FIG. 3, the elevator starts from the departure floor and accelerates to reach speed V1 after time T1, reaches the maximum speed Vmax after time T2, starts to decelerate after time T3, and starts at time T4. We arrive at the stop floor later and stop.
また、パラメータ設定部12は、それぞれのエレベータに設定された出発の優先度を格納する。出発の優先度については、後述する。
The
出発抑制制御部13は、到着予測時刻算出部14、追越し予測検出部15、追越し速度差算出部16、及び出発抑制管理部17を備え、パラメータ設定部12と入出力管理部11に接続される。出発抑制制御部13は、入出力管理部11を介して、入出力制御部28に対して情報を送受信する。
The departure
到着予測時刻算出部14は、入出力管理部11と入出力制御部28とを介してかご制御部20a〜20dから送信された運行情報と、パラメータ設定部12が格納しているエレベータ情報とを基に、各かごの次の停止階への到着予測時刻を算出する。入出力管理部11は、入出力制御部28から受信した情報を、到着予測時刻算出部14に送信する。
The estimated arrival
追越し予測検出部15は、到着予測時刻算出部14が算出した各かごの到着予測時刻と、運行情報と、パラメータ設定部12が格納しているエレベータ情報とを基に、同一昇降路内でのエレベータ(かご)間で追越しが発生するか否かを求める。追越しが発生するか否かを求める方法については、後述する。
The overtaking
追越し速度差算出部16は、追越し予測検出部15が求めた結果と、運行情報と、エレベータ情報とを基に、追越しが発生する場合の追越し速度差を算出する。追越し速度差算出部16は、算出した追越し速度差を、出発抑制管理部17に送信する。
The overtaking speed
追越し速度差は、追越しが発生するときの追越すエレベータの速度と追越されるエレベータの速度との差を求めることにより、算出する。追越しが発生するときのそれぞれのエレベータの速度は、パラメータ設定部12が格納している速度パターン(図3参照)を用いて算出することができる。従って、追越し速度差は、例えば、追越すエレベータと追越されるエレベータのそれぞれに対し、追越しが発生する時刻における速度をそれぞれの速度パターンを用いて求め、求めた速度の差を求めることにより、算出できる。追越し速度差は、この方法に限らず、他の方法で算出してもよい。
The overtaking speed difference is calculated by obtaining the difference between the speed of the overtaking elevator and the overtaking elevator speed when overtaking occurs. The speed of each elevator when overtaking occurs can be calculated using the speed pattern (see FIG. 3) stored in the
出発抑制管理部17は、追越し速度差算出部16が算出した追越し速度差が、パラメータ設定部12が格納している規定速度差よりも大きかった場合には、追越しが発生するエレベータのうち一方のエレベータの出発を抑制し(遅らせ)、追越し速度差が規定速度差以下となるように調整する。この場合、出発抑制管理部17は、エレベータ(かご)の位置や速度等から、出発を抑制するエレベータと出発抑制時間(出発を遅らせる時間)を求め、これらの情報(出発抑制指令)を入出力管理部11に送信する。出発を抑制するエレベータと出発抑制時間を求める方法については、後述する。
When the overtaking speed difference calculated by the overtaking speed
入出力管理部11は、出発抑制管理部17から受信した情報(出発抑制指令)を、入出力制御部28に送信する。
The input /
ホール呼び部25は、各階の乗場に設置されているホール呼び釦31とカードリーダ32を備える。エレベータの乗客は、ホール呼び釦31を押すかカードリーダ32にエレベータを呼ぶためのカードを読ませることで、エレベータを呼ぶことができる。ホール呼び釦31又はカードリーダ32によりエレベータが呼ばれた場合には、ホール呼び部25は、入出力制御部28に、ホール呼び情報(何階からどの方向にエレベータが呼ばれたかという情報)を送信する。
The
出発抑制管理部17は、上述したように、追越し速度差が規定速度差よりも大きかった場合には、出発を抑制するエレベータを求める。出発を抑制するエレベータは、それぞれのエレベータに設定した出発の優先度に基づいて求める。出発抑制管理部17は、同一昇降路内にあって追越しが発生するエレベータのうち、出発の優先度が低いエレベータを、出発を抑制する(遅らせる)エレベータと定める。
As described above, the departure
出発抑制管理部17は、運行情報(例えば、各時刻におけるエレベータの位置、速度及び進行方向)、エレベータ情報(例えば、速度パターン、及び定格速度)、次の停止階、及び走行区間等を考慮して、それぞれのエレベータ(かご)に対して出発の優先度を設定する。次の停止階は、ホール呼び情報から求めることができ、走行区間は、かごの現在の位置と次の停止階とから求めることができる。また、かごの進行方向は、かごの現在の位置とホール呼び情報とから求めることができる。出発の優先度を設定する方法は、任意に定めることができる。出発抑制管理部17は、それぞれのエレベータに対して設定した出発の優先度を、パラメータ設定部12に格納する。
The departure
図4は、本実施例によるエレベータの制御システムが、追越しが発生するか否かを求め、出発抑制時間を求める処理のフローチャートである。本実施例によるエレベータの制御システムは、同一昇降路内のエレベータに対して図4に示す一連の処理を随時実行し、追越し速度差が規定速度差よりも大きかった場合には、一方のエレベータの出発を抑制し、追越し速度差が規定速度差以下となるように調整する。なお、本実施例では、図1、図2に示したように、同一昇降路内で1台の一般エレベータと1台の高速エレベータ(定格速度が一般エレベータよりも速いエレベータ)が走行する場合について説明する。 FIG. 4 is a flowchart of a process in which the elevator control system according to the present embodiment obtains whether or not overtaking occurs and obtains a departure restraint time. The elevator control system according to the present embodiment executes a series of processes shown in FIG. 4 as needed for the elevators in the same hoistway, and when the passing speed difference is larger than the specified speed difference, Suppress the departure and adjust so that the overtaking speed difference is less than the specified speed difference. In this embodiment, as shown in FIGS. 1 and 2, a single general elevator and a single high-speed elevator (elevator whose rated speed is faster than a general elevator) travel in the same hoistway. explain.
ステップS1において、出発抑制管理部17は、それぞれのエレベータ(かご)に対して、出発の優先度を設定する。出発の優先度の設定方法は、上述した通りである。その後、ステップ2へ進む。
In step S1, the departure
ステップ2において、群管理制御部24は、高速エレベータの走行区間と一般エレベータの走行区間とが重なっているかどうかを判定する。例えば、一般エレベータの走行区間が1階から120階であり、高速エレベータの走行区間が地下2階から110階である場合には、これらの走行区間は1階から110階の区間が重なっていると判定される。エレベータの走行区間は、かごの現在の位置と次の停止階とから求めることができ、かごの現在の位置は運行情報から求めることができ、かごの次の停止階はホール呼び情報から求めることができる。高速エレベータの走行区間と一般エレベータの走行区間とが重なっている場合には、ステップS3へ進む。
In
ステップS3において、群管理制御部24は、一般エレベータと高速エレベータが同一方向に走行するか否かを判定する。これらのエレベータが同一方向に走行するか否かは、運行情報から求めることができる。これらのエレベータが同一方向に走行する場合には、ステップS4へ進む。
In step S3, the group
ステップS4において、群管理制御部24は、運行情報を用いて、一般エレベータと高速エレベータの進行方向が上方向であるか否かを判定する。これらのエレベータの進行方向が上方向である場合には、ステップS5へ進み、上方向でない場合(すなわち下方向である場合)には、ステップS6へ進む。
In step S4, the group
ステップS5は、一般エレベータと高速エレベータの進行方向が上方向である場合の処理である。ステップS5では、群管理制御部24は、運行情報を用いて、高速エレベータの現在の位置が、一般エレベータの現在の位置よりも下の階にあるか否かを判定する。高速エレベータの現在の位置が、一般エレベータの現在の位置よりも下の階にある場合には、ステップS7へ進む。
Step S5 is processing when the traveling direction of the general elevator and the high-speed elevator is upward. In step S5, the group
ステップS6は、一般エレベータと高速エレベータの進行方向が下方向である場合の処理である。ステップS6では、群管理制御部24は、運行情報を用いて、高速エレベータの現在の位置が、一般エレベータの現在の位置よりも上の階にあるか否かを判定する。高速エレベータの現在の位置が、一般エレベータの現在の位置よりも上の階にある場合には、ステップS7へ進む。
Step S6 is processing when the traveling direction of the general elevator and the high-speed elevator is downward. In step S6, the group
ステップS7において、到着予測時刻算出部14は、高速エレベータと一般エレベータの、次の停止階への到着予想時刻を算出する。次の停止階への到着予想時刻は、運行情報(例えば、各時刻におけるエレベータの位置、速度及び進行方向)とエレベータ情報(例えば、速度パターン)を用いて算出することができる。その後、ステップ8へ進む。
In step S7, the estimated arrival
ステップS8において、追越し予測検出部15は、到着予測時刻算出部14が算出した次の停止階への到着予想時刻を用い、進行方向の先にあるエレベータの到着予想時刻が、進行方向の後にあるエレベータの到着予想時刻よりも遅いか否かを判定する。例えば、一般エレベータと高速エレベータの進行方向が上方向である場合には、一般エレベータ(S5より進行方向の先にあるエレベータ)の次の停止階への到着予想時刻が、高速エレベータ(S5より進行方向の後にあるエレベータ)の次の停止階への到着予想時刻よりも遅いか否かを判定する。次の停止階への到着予想時刻が、進行方向の先にあるエレベータの方が、進行方向の後にあるエレベータよりも遅い場合には、ステップS9へ進む。
In step S8, the overtaking
ステップS9において、追越し予測検出部15は、運行情報(例えば、各時刻におけるエレベータの位置、速度及び進行方向)とエレベータ情報(例えば、速度パターン)を用い、高速エレベータと一般エレベータが、同じ時刻に同じ位置にいたかどうかを調べる。これらのエレベータが同じ時刻に同じ位置にいた場合は、エレベータ(かご)間で追越しが発生する場合であり、ステップS10へ進む。これらのエレベータが同じ時刻に同じ位置にいない場合には、エレベータ(かご)間で追越しが発生しない。
In step S9, the overtaking
エレベータ間で追越しが発生する場合、これらのエレベータが同じ位置にいた時刻が、追越しが発生する時刻であり、この同じ位置(追越しが発生する時刻でのエレベータの位置)が、追越しが発生する位置である。追越し予測検出部15は、このようにして、エレベータ間で追越しが発生するか否かを求め、エレベータ間で追越しが発生する場合には、追越しが発生する時刻(追越し時刻)と追越しが発生する位置(追越し位置)を求めることができる。
When overtaking occurs between elevators, the time when these elevators were in the same position is the time when overtaking occurs, and this same position (position of the elevator at the time when overtaking occurs) is the position where overtaking occurs. It is. In this way, the overtaking
ステップS10において、追越し速度差算出部16は、追越し予測検出部15が求めた追越し時刻と運行情報とエレベータ情報(速度パターン)を用い、高速エレベータと一般エレベータのそれぞれに対し、追越し時刻における速度を求める。そして、求めた速度の差を求めることにより、追越し速度差を算出する。その後、ステップ11へ進む。
In step S10, the overtaking speed
ステップ11において、出発抑制管理部17は、追越し速度差算出部16が求めた追越し速度差とパラメータ設定部12が格納している規定速度差とを比較する。そして、追越し速度差が規定速度差よりも大きかった場合には、ステップS12へ進む。
In
ステップ12において、出発抑制管理部17は、追越し速度差が規定速度差以下となるような出発抑制時間tを求める。出発抑制時間tは、次のようにして求める。
In
ステップS1にて設定した出発の優先度が低いエレベータ(出発を抑制するエレベータ)の出発時刻を時間Δtだけ遅らせたと仮定として、ステップS9、S10と同様にして、追越し速度差を再計算する。次に、ステップS11と同様にして、この再計算で得られた追越し速度差と規定速度差とを比較する。再計算で得られた追越し速度差が規定速度差よりも大きかった場合には、時間Δtを大きくし、追越し速度差を再計算する。以上の処理を、再計算で得られた追越し速度差が規定速度差以下となるまで繰り返す。そして、再計算で得られた追越し速度差が規定速度差以下となったときの時間Δtを、出発抑制時間tとする。このようにして出発抑制時間tを求めたら、ステップS13へと進む。 Assuming that the departure time of the elevator with the low priority of departure set in step S1 (elevator for suppressing departure) is delayed by time Δt, the overtaking speed difference is recalculated in the same manner as in steps S9 and S10. Next, as in step S11, the overtaking speed difference obtained by this recalculation is compared with the specified speed difference. If the overtaking speed difference obtained by recalculation is larger than the specified speed difference, the time Δt is increased and the overtaking speed difference is recalculated. The above process is repeated until the overtaking speed difference obtained by recalculation becomes equal to or less than the specified speed difference. Then, the time Δt when the overtaking speed difference obtained by recalculation becomes equal to or less than the specified speed difference is set as the departure suppression time t. When the departure suppression time t is obtained in this way, the process proceeds to step S13.
ステップS13において、出発抑制管理部17は、追越しが発生するエレベータのうち出発の優先度が低いエレベータの出発時刻を出発抑制時間tだけ遅らせて、出発の優先度が低いエレベータの出発を抑制する。出発抑制管理部17は、出発抑制指令(出発を抑制するエレベータと出発抑制時間t)を入出力管理部11に送信する。入出力管理部11は、出発抑制指令を、入出力制御部28を介して、かご制御部20a〜20dに送信する。このようにして、出発抑制管理部17は、出発の優先度が低いエレベータの出発を抑制する(遅らせる)ことで、追越し速度差が規定速度差以下となるように調整することができる。
In step S13, the departure
図4に示したフローチャートでは、追越し速度差を求め、追越し速度差が規定速度差よりも大きかった場合にエレベータの出発を抑制し、追越し速度差が規定速度差以下となるように調整している。この方法のほかに、エレベータの追越し禁止区間を予め定めることにより、追越し速度差が規定速度差以下となるようにエレベータの出発を抑制することができる。以下では、この方法について説明する。 In the flowchart shown in FIG. 4, the overtaking speed difference is obtained, and when the overtaking speed difference is larger than the specified speed difference, the departure of the elevator is suppressed, and the overtaking speed difference is adjusted to be equal to or less than the specified speed difference. . In addition to this method, by setting an elevator overtaking prohibition section in advance, it is possible to suppress the departure of the elevator so that the overtaking speed difference is equal to or less than the specified speed difference. Hereinafter, this method will be described.
エレベータの追越し禁止区間は、エレベータの走行区間のうち、エレベータ(かご)間で追越しが発生するのを禁止する走行区間であり、予め任意に設定することができる。例えば、昇降路の走行方向の中央部にある走行区間を、追越し禁止区間として設定することができる。図1に示した例では、例えば50〜60階を含む走行区間を、追越し禁止区間とすることができる。昇降路の走行方向の中央部にある走行区間では、エレベータの速度が大きいことが多いため、追越し速度差も大きく、追越し速度差が規定速度差よりも大きいことが予想されるからである。追越し禁止区間外では、追越し速度差が規定速度差以下であることが予想される。追越し禁止区間は、予めパラメータ設定部12に設定しておく。パラメータ設定部12は、追越し禁止区間を格納する。
The elevator overtaking prohibition section is a traveling section that prohibits overtaking from occurring between elevators (cars) in the elevator traveling section, and can be arbitrarily set in advance. For example, a traveling section in the center of the traveling direction of the hoistway can be set as an overtaking prohibited section. In the example shown in FIG. 1, for example, a traveling section including 50 to 60 floors can be set as an overtaking prohibited section. This is because, in the traveling section in the central portion of the hoistway in the traveling direction, the elevator speed is often large, so the overtaking speed difference is large and the overtaking speed difference is expected to be larger than the specified speed difference. Outside the overtaking prohibited section, the overtaking speed difference is expected to be less than the specified speed difference. The overtaking prohibited section is set in the
図5は、本実施例によるエレベータの制御システムにおいて、追越し禁止区間を予め定めることにより、追越し速度差が規定速度差以下となるような出発抑制時間を求める処理のフローチャートである。以下の説明では、図4に示したフローチャートと異なる部分についてのみ説明する。 FIG. 5 is a flowchart of a process for obtaining a departure restraint time such that the overtaking speed difference is equal to or less than the specified speed difference by predetermining the overtaking prohibition section in the elevator control system according to the present embodiment. In the following description, only parts different from the flowchart shown in FIG. 4 will be described.
ステップS21において、追越し速度差算出部16は、ステップS9で追越し予測検出部15が求めた追越し位置が、パラメータ設定部12が格納している追越し禁止区間内にあるか否かを求める。追越し位置が追越し禁止区間内にある場合には、ステップS22へ進む。
In step S21, the overtaking speed
ステップ22において、出発抑制管理部17は、追越し位置が追越し禁止区間内に入らなくなるような出発抑制時間tを求める。出発抑制時間tは、次のようにして求める。
In
ステップS1にて設定した出発の優先度が低いエレベータ(出発を抑制するエレベータ)の出発時刻を時間Δtだけ遅らせたと仮定として、ステップS9、S10と同様にして、追越し位置を再度求める。次に、ステップS21と同様にして、再度求めた追越し位置が追越し禁止区間内にあるか否かを求める。再度求めた追越し位置が追越し禁止区間内にある場合には、時間Δtを大きくし、追越し位置を再度求める。以上の処理を、再度求めた追越し位置が追越し禁止区間外にあるようになるまで繰り返す。そして、再度求めた追越し位置が追越し禁止区間外にあるようになったときの時間Δtを、出発抑制時間tとする。このようにして出発抑制時間tを求めたら、ステップS13へと進む。 Assuming that the departure time of the elevator with the low priority of departure set in step S1 (elevator for suppressing departure) is delayed by time Δt, the overtaking position is obtained again in the same manner as in steps S9 and S10. Next, as in step S21, it is determined whether or not the overtaking position obtained again is within the overtaking prohibited section. When the overtaking position obtained again is within the overtaking prohibition section, the time Δt is increased and the overtaking position is obtained again. The above processing is repeated until the overtaking position obtained again is outside the overtaking prohibited section. Then, the time Δt when the overtaking position obtained again is outside the overtaking prohibition section is set as the departure suppression time t. When the departure suppression time t is obtained in this way, the process proceeds to step S13.
以上のようにして、エレベータの追越しを、追越し禁止区間内で発生させないようにし、追越し禁止区間外で発生させることができる。上述したように、追越し禁止区間内では、は追越し速度差が規定速度差よりも大きいことが予想され、追越し禁止区間外では、追越し速度差が規定速度差以下であることが予想される。従って、図5に示したフローチャートによる処理により、追越しが発生するエレベータのうち一方のエレベータの出発を抑制し、追越し速度差が規定速度差以下となるように調整することができる。 As described above, the overtaking of the elevator can be prevented from occurring within the overtaking prohibited section and can be generated outside the overtaking prohibited section. As described above, the overtaking speed difference is expected to be larger than the specified speed difference within the overtaking prohibited section, and the overtaking speed difference is expected to be less than the specified speed difference outside the overtaking prohibited section. Therefore, by the process according to the flowchart shown in FIG. 5, it is possible to suppress the departure of one of the elevators in which overtaking occurs and adjust the overtaking speed difference to be equal to or less than the specified speed difference.
以上に示した実施例では、規定速度差と追越し禁止区間は、予め定めてパラメータ設定部12に設定(格納)しておく。パラメータ設定部12に格納されている規定速度差と追越し禁止区間は、追越し速度差算出部16又は出発抑制管理部17が変更することも可能である。本実施例では、追越し速度差算出部16が規定速度差と追越し禁止区間を変更するものとする。
In the embodiment described above, the specified speed difference and the overtaking prohibition section are determined in advance and set (stored) in the
追越し速度差算出部16は、エレベータの運行時刻(運行時間帯)や乗場でのエレベータの待ち時間に応じて、規定速度差又は追越し禁止区間を変更する。例えば、エレベータの運行時刻が夜間のときは、運行時刻が昼間のときよりも規定速度差を小さくしたり追越し禁止区間を長くしたりして、昼間よりもエレベータの騒音や振動を低減するようにする。また、エレベータの待ち時間が長いときは、通常の運行時よりも規定速度差を大きくしたり追越し禁止区間を短くしたりして、(エレベータの騒音や振動の低減効果を犠牲にするが)通常の運行時よりエレベータが高速で走行するのを可能にする。追越し速度差算出部16は、変更した規定速度差又は追越し禁止区間をパラメータ設定部12に格納する。
The overtaking speed
以上の実施例では、壁等で区切られていない同一昇降路内に2台のエレベータが併設されている場合について説明した。本発明によるエレベータの制御システムは、同一昇降路内に3台以上のエレベータが併設されている場合でも、以上の実施例と同様にして、エレベータの追越し時の速度差を考慮してエレベータの騒音や振動を低減することができる。 In the above embodiment, the case where two elevators are provided in the same hoistway that is not separated by a wall or the like has been described. In the elevator control system according to the present invention, even when three or more elevators are provided in the same hoistway, the elevator noise is taken into consideration in the same manner as in the above embodiments in consideration of the speed difference when the elevator is overtaken. And vibration can be reduced.
なお、本発明は、上記の実施例に限定されるものではなく、様々な変形例を含む。例えば、上記の実施例は、本発明を分かりやすく説明するために詳細に説明したものであり、本発明は、必ずしも説明した全ての構成を備える態様に限定されるものではない。 In addition, this invention is not limited to said Example, Various modifications are included. For example, the above-described embodiments are described in detail for easy understanding of the present invention, and the present invention is not necessarily limited to an aspect including all the configurations described.
1a、1c…高速エレベータ、1b、1d…一般エレベータ、11…入出力管理部、12…パラメータ設定部、13…出発抑制制御部、14…到着予測時刻算出部、15…追越し予測検出部、16…追越し速度差算出部、17…出発抑制管理部、20a〜20d…かご制御部、21a〜21d…かご状態送信部、22a〜22d…出発抑制指令部、24…群管理制御部、25…ホール呼び部、26、27…昇降路、28…入出力制御部、31…ホール呼び釦、32…カードリーダ。
DESCRIPTION OF
Claims (6)
パラメータ設定部と、到着予測時刻算出部と、追越し予測検出部と、追越し速度差算出部と、出発抑制管理部とを有し、各時刻における前記エレベータの位置、速度及び進行方向を運行情報として前記エレベータから受信する群管理制御部を備え、
前記パラメータ設定部は、前記エレベータの移動時間と速度との関係を予め定めた速度パターンと、予め定めた規定速度差と、前記エレベータに設定した出発の優先度とを格納し、
前記到着予測時刻算出部は、前記運行情報と前記速度パターンとを用いて、前記エレベータの次の停止階への到着予測時刻を算出し、
前記追越し予測検出部は、前記到着予想時刻と前記運行情報と前記速度パターンとを用いて、前記同一昇降路内で前記エレベータ間で追越しが発生するか否かを求め、追越しが発生する場合には追越しが発生する時刻と追越しが発生する位置とを求め、
前記追越し速度差算出部は、前記追越しが発生する時刻と前記運行情報と前記速度パターンとを用いて、追越しが発生する前記エレベータ間の前記追越しが発生する時刻における速度の差を、追越し速度差として求め、
前記出発抑制管理部は、前記追越し速度差が前記規定速度差よりも大きい場合は、追越しが発生する前記エレベータのうち前記出発の優先度が低い前記エレベータの出発を遅らせる、
ことを特徴とするエレベータの制御システム。 In an elevator control system of an elevator apparatus in which a plurality of elevators with different rated speeds are installed in the same hoistway,
It has a parameter setting unit, an estimated arrival time calculation unit, an overtaking prediction detection unit, an overtaking speed difference calculation unit, and a departure suppression management unit, and uses the position, speed, and traveling direction of the elevator at each time as operation information A group management control unit for receiving from the elevator;
The parameter setting unit stores a speed pattern in which a relationship between the moving time and speed of the elevator is determined in advance, a predetermined speed difference, and a departure priority set in the elevator,
The predicted arrival time calculation unit calculates the predicted arrival time to the next stop floor of the elevator using the operation information and the speed pattern,
The overtaking prediction detection unit obtains whether or not overtaking occurs between the elevators in the same hoistway using the estimated arrival time, the operation information, and the speed pattern, and when overtaking occurs. Finds the time when the overtaking occurs and the position where the overtaking occurs,
The overtaking speed difference calculation unit uses the time at which the overtaking occurs, the operation information, and the speed pattern to calculate a difference in speed at the time at which the overtaking occurs between the elevators where overtaking occurs. As sought
The departure suppression management unit, when the overtaking speed difference is larger than the specified speed difference, delays the departure of the elevator having a low priority of the departure among the elevators in which overtaking occurs,
An elevator control system characterized by that.
前記エレベータの出発を遅らせる時間である出発抑制時間を、前記出発の優先度が低い前記エレベータの出発を前記出発抑制時間だけ遅らせたとして求めた前記追越し速度差が前記規定速度差以下となるように求め、
前記出発の優先度が低い前記エレベータの出発を、求めた前記出発抑制時間だけ遅らせる、請求項1に記載のエレベータの制御システム。 The departure suppression management unit
The overtaking speed difference obtained by delaying the departure of the elevator, which is a time for delaying the departure of the elevator, by delaying the departure of the elevator having a low priority of the departure by the departure suppression time is equal to or less than the specified speed difference. Seeking
The elevator control system according to claim 1, wherein the departure of the elevator with the low priority of the departure is delayed by the obtained departure suppression time.
パラメータ設定部と、到着予測時刻算出部と、追越し予測検出部と、追越し速度差算出部と、出発抑制管理部とを有し、各時刻における前記エレベータの位置、速度及び進行方向を運行情報として前記エレベータから受信する群管理制御部を備え、
前記パラメータ設定部は、前記エレベータの移動時間と速度との関係を予め定めた速度パターンと、予め定めた追越し禁止区間と、前記エレベータに設定した出発の優先度とを格納し、
前記到着予測時刻算出部は、前記運行情報と前記速度パターンとを用いて、前記エレベータの次の停止階への到着予測時刻を算出し、
前記追越し予測検出部は、前記到着予想時刻と前記運行情報と前記速度パターンとを用いて、前記同一昇降路内で前記エレベータ間で追越しが発生するか否かを求め、追越しが発生する場合には追越しが発生する時刻と追越しが発生する位置とを求め、
前記追越し速度差算出部は、前記追越しが発生する位置が、前記追越し禁止区間内にあるか否かを求め、
前記出発抑制管理部は、前記追越しが発生する位置が前記追越し禁止区間内にある場合は、追越しが発生する前記エレベータのうち前記出発の優先度が低い前記エレベータの出発を遅らせる、
ことを特徴とするエレベータの制御システム。 In an elevator control system of an elevator apparatus in which a plurality of elevators with different rated speeds are installed in the same hoistway,
It has a parameter setting unit, an estimated arrival time calculation unit, an overtaking prediction detection unit, an overtaking speed difference calculation unit, and a departure suppression management unit, and uses the position, speed, and traveling direction of the elevator at each time as operation information A group management control unit for receiving from the elevator;
The parameter setting unit stores a predetermined speed pattern of a relationship between the moving time and speed of the elevator, a predetermined overtaking prohibition section, and a departure priority set for the elevator,
The predicted arrival time calculation unit calculates the predicted arrival time to the next stop floor of the elevator using the operation information and the speed pattern,
The overtaking prediction detection unit obtains whether or not overtaking occurs between the elevators in the same hoistway using the estimated arrival time, the operation information, and the speed pattern, and when overtaking occurs. Finds the time when the overtaking occurs and the position where the overtaking occurs,
The overtaking speed difference calculating unit obtains whether the position where the overtaking occurs is within the overtaking prohibited section,
The departure suppression management unit, when the position where the overtaking occurs is within the overtaking prohibited section, delays the departure of the elevator with a low priority of the departure among the elevators where overtaking occurs,
An elevator control system characterized by that.
前記エレベータの出発を遅らせる時間である出発抑制時間を、前記出発の優先度が低い前記エレベータの出発を前記出発抑制時間だけ遅らせたとして求めた前記追越しが発生する位置が前記追越し禁止区間外となるように求め、
前記出発の優先度が低い前記エレベータの出発を、求めた前記出発抑制時間だけ遅らせる、請求項3に記載のエレベータの制御システム。 The departure suppression management unit
The position where the overtaking occurs, which is obtained by delaying the departure of the elevator having a low priority of the departure by the departure suppression time, is outside the overtaking prohibition section. Asking
The elevator control system according to claim 3, wherein the departure of the elevator with the low priority of departure is delayed by the obtained departure suppression time.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014135566A JP6278853B2 (en) | 2014-07-01 | 2014-07-01 | Elevator control system |
| CN201510368824.9A CN105314474B (en) | 2014-07-01 | 2015-06-29 | Elevator control system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014135566A JP6278853B2 (en) | 2014-07-01 | 2014-07-01 | Elevator control system |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2016013877A true JP2016013877A (en) | 2016-01-28 |
| JP2016013877A5 JP2016013877A5 (en) | 2017-01-19 |
| JP6278853B2 JP6278853B2 (en) | 2018-02-14 |
Family
ID=55230428
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014135566A Active JP6278853B2 (en) | 2014-07-01 | 2014-07-01 | Elevator control system |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6278853B2 (en) |
| CN (1) | CN105314474B (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019205099A1 (en) * | 2018-04-27 | 2019-10-31 | 深圳技术大学(筹) | Method and system for measuring elevator running speed |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5373754A (en) * | 1976-12-08 | 1978-06-30 | Mitsubishi Electric Corp | Device for controlling elevator cage |
| JPS63134477A (en) * | 1986-11-25 | 1988-06-07 | 株式会社日立製作所 | Group controller for elevator |
| JPH04313571A (en) * | 1991-04-12 | 1992-11-05 | Mitsubishi Electric Corp | Elevator control method |
| JPH0797149A (en) * | 1993-09-24 | 1995-04-11 | Mitsubishi Electric Corp | Operating device for elevator |
| JPH0834571A (en) * | 1994-07-26 | 1996-02-06 | Mitsubishi Electric Corp | Elevator device |
| JP2003073042A (en) * | 2001-09-04 | 2003-03-12 | Toshiba Elevator Co Ltd | Elevator group supervisory control device |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH02129371U (en) * | 1990-04-06 | 1990-10-25 | ||
| CN101665204B (en) * | 2004-06-21 | 2012-04-25 | 奥蒂斯电梯公司 | Elevator system containing multiple cabins in vertical shaft |
| WO2006025103A1 (en) * | 2004-08-31 | 2006-03-09 | Mitsubishi Denki Kabushiki Kaisha | Controller of one-shaft multi-car system elevator |
| JP5870750B2 (en) * | 2012-02-23 | 2016-03-01 | フジテック株式会社 | Elevator operation system and operation method |
-
2014
- 2014-07-01 JP JP2014135566A patent/JP6278853B2/en active Active
-
2015
- 2015-06-29 CN CN201510368824.9A patent/CN105314474B/en active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5373754A (en) * | 1976-12-08 | 1978-06-30 | Mitsubishi Electric Corp | Device for controlling elevator cage |
| JPS63134477A (en) * | 1986-11-25 | 1988-06-07 | 株式会社日立製作所 | Group controller for elevator |
| JPH04313571A (en) * | 1991-04-12 | 1992-11-05 | Mitsubishi Electric Corp | Elevator control method |
| JPH0797149A (en) * | 1993-09-24 | 1995-04-11 | Mitsubishi Electric Corp | Operating device for elevator |
| JPH0834571A (en) * | 1994-07-26 | 1996-02-06 | Mitsubishi Electric Corp | Elevator device |
| JP2003073042A (en) * | 2001-09-04 | 2003-03-12 | Toshiba Elevator Co Ltd | Elevator group supervisory control device |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019205099A1 (en) * | 2018-04-27 | 2019-10-31 | 深圳技术大学(筹) | Method and system for measuring elevator running speed |
Also Published As
| Publication number | Publication date |
|---|---|
| CN105314474A (en) | 2016-02-10 |
| JP6278853B2 (en) | 2018-02-14 |
| CN105314474B (en) | 2017-05-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8136635B2 (en) | Method and system for maintaining distance between elevator cars in an elevator system with multiple cars in a single hoistway | |
| JP5646047B2 (en) | Multi-car elevator and control method thereof | |
| KR20100063121A (en) | Multiple car hoistway including car separation control | |
| US9096410B2 (en) | Multi-car elevator control device | |
| KR102277349B1 (en) | Method for operating a lift system, and lift system | |
| JP2007302362A (en) | Terminal landing speed control system of elevator | |
| JPWO2007039927A1 (en) | Elevator control device | |
| US7431130B2 (en) | Group controller of elevators | |
| JP2010064874A (en) | Group supervisory operation elevator | |
| JP6278853B2 (en) | Elevator control system | |
| JP2007137545A (en) | Elevator control device | |
| US7213685B2 (en) | Control device and control method for elevator | |
| JP2001247265A (en) | Elevator control system | |
| JPWO2016157369A1 (en) | Elevator control system | |
| US20190084798A1 (en) | Method for operating a lift system, control system, and lift system | |
| JP2006240798A (en) | Control method for elevator | |
| CN111517186B (en) | Multi-car elevator running speed calculation method based on safe distance | |
| JP2003073042A (en) | Elevator group supervisory control device | |
| JP2008230758A (en) | Terminal floor speed control system of elevator | |
| JP5224737B2 (en) | Multi-cage elevator control device | |
| KR101750735B1 (en) | Control method for destination selecting system for high-speed parallel driving prevention of group management elevator | |
| JPH0834571A (en) | Elevator device | |
| WO2013140598A1 (en) | Elevator control device | |
| JP6223799B2 (en) | Elevator speed control method | |
| JPS6326078B2 (en) |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161201 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20161201 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20171025 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20171031 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20180109 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20180116 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 6278853 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |