JP2015529065A - スケーラブルビデオコーディングおよび3dビデオコーディングのための多重仮説動き補償 - Google Patents
スケーラブルビデオコーディングおよび3dビデオコーディングのための多重仮説動き補償 Download PDFInfo
- Publication number
- JP2015529065A JP2015529065A JP2015526609A JP2015526609A JP2015529065A JP 2015529065 A JP2015529065 A JP 2015529065A JP 2015526609 A JP2015526609 A JP 2015526609A JP 2015526609 A JP2015526609 A JP 2015526609A JP 2015529065 A JP2015529065 A JP 2015529065A
- Authority
- JP
- Japan
- Prior art keywords
- video
- layer
- video unit
- prediction
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images










Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/30—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using hierarchical techniques, e.g. scalability
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/513—Processing of motion vectors
- H04N19/517—Processing of motion vectors by encoding
- H04N19/52—Processing of motion vectors by encoding by predictive encoding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/577—Motion compensation with bidirectional frame interpolation, i.e. using B-pictures
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/597—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding specially adapted for multi-view video sequence encoding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/46—Embedding additional information in the video signal during the compression process
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/573—Motion compensation with multiple frame prediction using two or more reference frames in a given prediction direction
Abstract
Description
[0022] ビデオコーディング規格には、ITU−T H.261、ISO/IEC MPEG−1 Visual、ITU−T H.262またはISO/IEC MPEG−2 Visual、ITU−T H.263、ISO/IEC MPEG−4 Visual、および、そのスケーラブルビデオコーディング(SVC)およびマルチビュービデオコーディング(MVC)の拡張を含む(ISO/IEC MPEG−4 AVCとしても知られている)ITU−T H.264が含まれる。加えて、ITU−T Video Coding Experts Group(VCEG)とISO/IEC Motion Picture Experts Group(MPEG)とのJoint Collaboration Team on Video Coding(JCT−VC)によって開発されている新しいビデオコーディング規格、すなわち、高効率ビデオコーディング(HEVC)がある。HEVCの最新ドラフトは、2012年6月7日現在、http://wg11.sc29.org/jct/doc_end_user/current_document.php?id=5885/JCTVC−I1003−v2から入手可能である。
[0078] 上述されたように、HEVCは次世代のビデオコーディング規格である。概して、HEVCは以前のビデオコーディング規格の枠組に追従する。HEVCの動き補償ループは、H.264/AVCにおける動き補償ループと同じに保持される、すなわち現在のフレームの復元

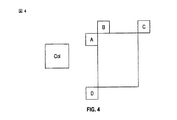
[0082] HEVCでは、インター予測ユニット(PU)ごとに、それぞれの動きパラメータが送信される。改善されたコーディング効率を実現するために、ブロックマージングプロセスが利用されて、いわゆるマージモードで最良の動きベクトル予測子を選択する。
〇availableFlagBが1に等しい場合、B
〇availableFlagColが1に等しい場合、Col(時間的に同じ位置にあるブロック)
〇availableFlagCが1に等しい場合、C
〇availableFlagDが1に等しい場合、D
●いくつかのマージング候補が動きベクトルと同じ参照インデックスとを有する場合、マージ候補リスト内で最小の順序を有するマージング候補を除き、マージング候補はリストから除去される。
[0084] 動きマージモード以外に、動きベクトル予測がHEVCでサポートされる。動きベクトル予測では、現在のPUについて、動きベクトル予測子(MVP)リストが構築される。予測子は、空間ネイバーまたは/および時間ネイバーからの動きベクトルであり得る。MVPリストは、3つまでの候補、空間左MVP Aと、空間上MVP Bと、時間MVP Colとを含んでいる。3つの候補のうちの1つまたは複数は、たとえば隣接ブロックがイントラであり、存在しないので、利用可能ではない。この場合、MVPリストはより少ない項目を有し、欠落した候補は利用可能ではないと考えられる。
[0105] 様々な次元におけるスケーラビリティの一例が図7に示される。本例では、スケーラビリティは3つの次元で可能にされる。時間の次元では、7.5Hz、15Hz、または30Hzを有するフレームレートが、時間スケーラビリティ(T)によってサポートされ得る。空間スケーラビリティ(S)がサポートされるとき、QCIF、CIF、および4CIFなどの様々な解像度が可能にされる。特定の空間解像度およびフレームレートごとに、ピクチャ品質を改善するためにSNR(Q)レイヤが追加され得る。ビデオコンテンツがそのようなスケーラブルな方法で符号化されると、たとえば、クライアントまたは伝送チャネルに依存するアプリケーション要件に従って、実際の配信されたコンテンツに適応するために抽出ツールが使用され得る。図7に示された例では、各立方体は、同じフレームレート(時間レベル)と、空間解像度と、SNRレイヤとを有するピクチャを含んでいる。それらの立方体(ピクチャ)を任意の次元で追加することによって、より良い表現が実現され得る。2つ、3つまたはさらに多くの可能にされたスケーラビリティが存在するとき、組み合わされたスケーラビリティがサポートされる。
[0109] SVCのいくつかの機能はH.264/AVCから引き継がれている。以前のスケーラブルな規格と比較して、最も重要な利点、すなわちレイヤ間予測および単一ループ復号が下記で概説される。
[0115] 図10は、暗黙的な多重仮説動き補償(IMMC)を実装するコーダ(たとえば、エンコーダまたはデコーダ)によって実施される、本開示の態様による、IMMCのための例示的な方法を示すブロック図1100である。便宜上、その動き情報がビットストリーム内で明示的にコーディングされていない仮説は、本開示では暗黙的な仮説と呼ばれ、その動き情報がビットストリーム内でコーディングされている仮説は、明示的な仮説と呼ばれる。本開示に記載された技法は、暗黙的な多重仮説動き補償の枠組を提供し、それはデコーダおよび/またはエンコーダによって実装され得る。
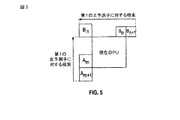
[0122] IMMCの一実施形態では、双予測ブロック/PU(たとえば、現在のビデオユニット1155)についての2つの従来の仮説に加えて、2つまでの暗黙的な仮説が可能にされる。この場合、同じ位置にある基本レイヤ/ビューのPUのスケーリングされた動きは、暗黙的な仮説の動きとして使用される。Ve0およびVe1が2つの従来の仮説の動きを表し、スケーリングされた基本レイヤの動きVsb0およびVsb1が2つの暗黙的な仮説の動きを示すとする。一実施形態では、スケーリングされた基本レイヤの動きが導出され得るので、暗黙的な仮説が使用されるどうかを示すフラグ(暗黙的な仮説フラグ)のみがビットストリーム内でコーディングされる必要がある。
[0134] 図11は、本開示の態様による、符号化ルーチン用の方法の一実施形態を示すフローチャートである。プロセス1200は、エンコーダ(たとえば、図2に示されたようなエンコーダ)、デコーダ(たとえば、図3に示されたようなデコーダ)、または任意の他の構成要素によって実施される場合がある。プロセス1200のステップは、図2のビデオエンコーダ20に関して記載されるが、プロセス1200は、上述されたように、デコーダなどの他の構成要素によって実施される場合がある。
[0147] 提案された多重仮説モードは、シーケンスレベルまたはフレームレベルで有効化/無効化され得る。たとえば、モードを示すために、シーケンスパラメータセット(SPS)またはピクチャパラメータセット(PPS)内のフラグが使用され得る。
Claims (43)
- ビデオ情報を復号する方法であって、
第1のレイヤ内の第1のビデオユニットを識別することと、
第2のレイヤ内の第2のビデオユニットを識別することと、
前記第1のビデオユニット用の複数の候補動きベクトルを備える候補リストを決定することと、ここにおいて、前記候補リストは、前記第2のビデオユニットに関連付けられた既定の動きベクトルから決定された少なくとも1つの導出された候補を含む、
前記候補リスト内の選択された候補の位置を識別するシグナリングされたインデックスに基づいて、前記候補動きベクトルの間で複数の候補を選択することと、
前記第1のビデオユニットについての予測を決定することと、ここにおいて、前記予測は予測仮説の組合せに対応し、ここにおいて前記予測仮説は前記候補リスト内の前記選択された候補に対応する、
を備える、方法。 - 前記第1のビデオユニットおよび前記第2のビデオユニットが、各々フレーム、スライス、コーディングユニット(CU)、予測ユニット(PU)、ブロック、またはピクセルの領域を備える、請求項1に記載の方法。
- 前記第1のレイヤがエンハンスメントレイヤであり、前記第2のレイヤが参照レイヤであるか、または前記第1のレイヤが3Dビデオの依存ビューであり、前記第2のレイヤが3Dビデオの基本ビューである、請求項1に記載の方法。
- 前記第2のレイヤ内の前記第2のビデオユニットが、前記第1のレイヤ内の前記第1のビデオユニットと空間的に同じ位置にある、請求項1に記載の方法。
- 前記候補動きベクトルのうちの少なくとも1つが、前記第1のビデオユニットに空間的に隣接する、前記第1のレイヤ内のビデオユニットに関連付けられた動きベクトルである、請求項1に記載の方法。
- 前記候補動きベクトルのうちの少なくとも1つが、前記第1のビデオユニットに時間的に隣接し、前記第1のビデオユニットと空間的に同じ位置にある、前記第1のレイヤ内のビデオユニットに関連付けられた動きベクトルである、請求項1に記載の方法。
- 前記候補動きベクトルのうちの少なくとも1つが、前記第1のビデオユニットに対して時間的に次の参照ビデオユニットに関して定義され、前記候補動きベクトルのうちの少なくとも1つが、前記第1のビデオユニットに対して時間的に前の参照ビデオユニットに関して定義される、請求項1に記載の方法。
- 前記導出された動きベクトルが、前記既定の動きベクトルをスケーリングすることによって決定され、前記スケーリングが、前記第1のレイヤと前記第2のレイヤとの間の、空間解像度における差分およびフレームレートにおける差分のうちの少なくとも1つに基づく、請求項1に記載の方法。
- 前記第1のビデオユニットについての前記予測が、前記選択された候補に対応する前記予測仮説を平均化し、0、1、または2のラウンディングオフセットを適用することによって少なくとも部分的に決定される、請求項1に記載の方法。
- 前記導出された動きベクトルが、前記第1のレイヤに関連付けられた、シグナリングされたインジケータに応答して決定される、請求項1に記載の方法。
- ビデオ情報を符号化する方法であって、
第1のレイヤ内の第1のビデオユニットを識別することと、
第2のレイヤ内の第2のビデオユニットを識別することと、
前記第1のビデオユニット用の複数の候補動きベクトルを備える候補リストを決定することと、ここにおいて、前記候補リストは、前記第2のビデオユニットに関連付けられた既定の動きベクトルから決定された少なくとも1つの導出された候補を含む、
前記候補動きベクトルの間で複数の候補を選択することと、
前記第1のビデオユニットについての予測を決定することと、ここにおいて、前記予測は予測仮説の組合せに対応し、ここにおいて前記予測仮説は前記候補リスト内の前記選択された候補に対応する、
前記候補リスト内の前記選択された候補の位置を識別するインデックスをシグナリングすることと
を備える、方法。 - 前記第1のビデオユニットおよび前記第2のビデオユニットが、各々フレーム、スライス、コーディングユニット(CU)、予測ユニット(PU)、ブロック、またはピクセルの領域を備える、請求項11に記載の方法。
- 前記第1のレイヤがエンハンスメントレイヤであり、前記第2のレイヤが参照レイヤであるか、または前記第1のレイヤが3Dビデオの依存ビューであり、前記第2のレイヤが3Dビデオの基本ビューである、請求項11に記載の方法。
- 前記第2のレイヤ内の前記第2のビデオユニットが、前記第1のレイヤ内の前記第1のビデオユニットと空間的に同じ位置にある、請求項11に記載の方法。
- 前記候補動きベクトルのうちの少なくとも1つが、前記第1のビデオユニットに空間的に隣接する、前記第1のレイヤ内のビデオユニットに関連付けられた動きベクトルである、請求項11に記載の方法。
- 前記候補動きベクトルのうちの少なくとも1つが、前記第1のビデオユニットに時間的に隣接し、前記第1のビデオユニットと空間的に同じ位置にある、前記第1のレイヤ内のビデオユニットに関連付けられた動きベクトルである、請求項11に記載の方法。
- 前記候補動きベクトルのうちの少なくとも1つが、前記第1のビデオユニットに対して時間的に次の参照ビデオユニットに関して定義され、前記候補動きベクトルのうちの少なくとも1つが、前記第1のビデオユニットに対して時間的に前の参照ビデオユニットに関して定義される、請求項11に記載の方法。
- 前記導出された動きベクトルが、前記既定の動きベクトルをスケーリングすることによって決定され、前記スケーリングが、前記第1のレイヤと前記第2のレイヤとの間の、空間解像度における差分およびフレームレートにおける差分のうちの少なくとも1つに基づく、請求項11に記載の方法。
- 前記第1のビデオユニットについての前記予測が、前記選択された候補に対応する前記予測仮説を平均化し、0、1、または2のラウンディングオフセットを適用することによって少なくとも部分的に決定される、請求項11に記載の方法。
- 前記第2のレイヤから導出された動きベクトルが前記第1のレイヤ用の候補リストに含まれることを示すインジケータをシグナリングすることをさらに備える、請求項11に記載の方法。
- ビデオ情報をコーディングするための装置であって、
第1のレイヤおよび対応する第2のレイヤに関連付けられたビデオ情報を記憶するように構成されたメモリユニットであって、前記ビデオ情報が、少なくとも前記第1のレイヤおよび第2のレイヤについての動き予測情報を含む、メモリユニットと、
前記メモリユニットと通信しているプロセッサであって、
前記第1のレイヤ内の第1のビデオユニットを識別することと、
前記第2のレイヤ内の第2のビデオユニットを識別することと、
少なくとも1つが前記第2のビデオユニットに関連付けられた既定の動きベクトルから導出された、前記第1のビデオユニット用の複数の候補動きベクトルを決定することと、
前記候補動きベクトルの間で複数の候補を選択することと、ここにおいて、前記選択された候補は、前記第1のビデオユニットについての複数の予測仮説に対応する、
前記第1のビデオユニットについての予測を決定することと、ここにおいて、前記予測は前記予測仮説の組合せに対応する、
を行うように構成された、プロセッサと
を備える、装置。 - 前記プロセッサが、候補リスト内の前記選択された候補の位置を識別するインデックスをシグナリングするようにさらに構成された、請求項21に記載の装置。
- 前記プロセッサが、候補リスト内の前記選択された候補の位置を識別するシグナリングされたインデックスに基づいて、前記候補動きベクトルの間で前記複数の選択された候補を選択するようにさらに構成された、請求項21に記載の装置。
- 前記第1のビデオユニットおよび前記第2のビデオユニットが、各々フレーム、スライス、コーディングユニット(CU)、予測ユニット(PU)、ブロック、またはピクセルの領域を備える、請求項21に記載の装置。
- 前記第1のレイヤがエンハンスメントレイヤであり、前記第2のレイヤが参照レイヤであるか、または前記第1のレイヤが3Dビデオの依存ビューであり、前記第2のレイヤが3Dビデオの基本ビューである、請求項21に記載の装置。
- 前記第2のレイヤ内の前記第2のビデオユニットが、前記第1のレイヤ内の前記第1のビデオユニットと空間的に同じ位置にある、請求項21に記載の装置。
- 前記候補動きベクトルのうちの少なくとも1つが、前記第1のビデオユニットに空間的に隣接する、前記第1のレイヤ内のビデオユニットに関連付けられた動きベクトルである、請求項21に記載の装置。
- 前記候補動きベクトルのうちの少なくとも1つが、前記第1のビデオユニットに時間的に隣接し、前記第1のビデオユニットと空間的に同じ位置にある、前記第1のレイヤ内のビデオユニットに関連付けられた動きベクトルである、請求項21に記載の装置。
- 前記候補動きベクトルのうちの少なくとも1つが、前記第1のビデオユニットに対して時間的に次の参照ビデオユニットに関して定義され、前記候補動きベクトルのうちの少なくとも1つが、前記第1のビデオユニットに対して時間的に前の参照ビデオユニットに関して定義される、請求項21に記載の装置。
- 前記既定の動きベクトルから導出された少なくとも1つの候補動きベクトルが、前記既定の動きベクトルをスケーリングすることによって決定され、前記スケーリングが、前記第1のレイヤと前記第2のレイヤとの間の、空間解像度における差分およびフレームレートにおける差分のうちの少なくとも1つに基づく、請求項21に記載の装置。
- 前記第1のビデオユニットについての前記予測が、前記選択された候補に対応する前記予測仮説を平均化し、0、1、または2のラウンディングオフセットを適用することによって少なくとも部分的に決定される、請求項21に記載の装置。
- 第1のレイヤ内の第1のビデオユニットを識別するための手段と、
第2のレイヤ内の第2のビデオユニットを識別するための手段と、
前記第1のビデオユニット用の複数の候補動きベクトルを決定するための手段と、ここにおいて前記候補動きベクトルのうちの少なくとも1つが、前記第2のビデオユニットに関連付けられた既定の動きベクトルから導出される、
前記候補動きベクトルの間で複数の候補を選択するための手段と、
前記第1のビデオユニットについての予測を決定するための手段と、ここにおいて前記予測が予測仮説の組合せに対応し、ここにおいて前記予測仮説が前記選択された候補に対応する、
を備える、ビデオコーディングデバイス。 - 前記候補動きベクトルのうちの少なくとも1つが、前記第1のビデオユニットに空間的に隣接する、前記第1のレイヤ内のビデオユニットに関連付けられた動きベクトルである、請求項32に記載のビデオコーディングデバイス。
- 前記候補動きベクトルのうちの少なくとも1つが、前記第1のビデオユニットに時間的に隣接し、前記第1のビデオユニットと空間的に同じ位置にある、前記第1のレイヤ内のビデオユニットに関連付けられた動きベクトルである、請求項32に記載のビデオコーディングデバイス。
- 前記候補動きベクトルのうちの少なくとも1つが、前記第1のビデオユニットに対して時間的に次の参照ビデオユニットに関して定義され、前記候補動きベクトルのうちの少なくとも1つが、前記第1のビデオユニットに対して時間的に前の参照ビデオユニットに関して定義される、請求項32に記載のビデオコーディングデバイス。
- 前記既定の動きベクトルから導出された少なくとも1つの候補動きベクトルが、前記既定の動きベクトルをスケーリングすることによって決定され、前記スケーリングが、前記第1のレイヤと前記第2のレイヤとの間の、空間解像度における差分およびフレームレートにおける差分のうちの少なくとも1つに基づく、請求項32に記載のビデオコーディングデバイス。
- 前記第1のビデオユニットについての前記予測が、前記選択された候補に対応する前記予測仮説を平均化し、0、1、または2のラウンディングオフセットを適用することによって少なくとも部分的に決定される、請求項32に記載のビデオコーディングデバイス。
- コンピュータストレージを有するコンピュータシステムによって実行されたとき、
第1のレイヤ内の第1のビデオユニットを識別することと、
第2のレイヤ内の第2のビデオユニットを識別することと、
前記第1のビデオユニット用の複数の候補動きベクトルを決定することと、ここにおいて、前記候補動きベクトルのうちの少なくとも1つは、前記第2のビデオユニットに関連付けられた既定の動きベクトルから導出される、
前記候補動きベクトルの間で複数の候補を選択することと、
前記第1のビデオユニットについての予測を決定することと、ここにおいて、前記予測は予測仮説の組合せに対応し、ここにおいて前記予測仮説は前記選択された候補に対応する、
を前記コンピュータシステムに行わせる命令を記憶した、非一時的コンピュータストレージ。 - 前記候補動きベクトルのうちの少なくとも1つが、前記第1のビデオユニットに空間的に隣接する、前記第1のレイヤ内のビデオユニットに関連付けられた動きベクトルである、請求項38に記載の非一時的コンピュータストレージ。
- 前記候補動きベクトルのうちの少なくとも1つが、前記第1のビデオユニットに時間的に隣接し、前記第1のビデオユニットと空間的に同じ位置にある、前記第1のレイヤ内のビデオユニットに関連付けられた動きベクトルである、請求項38に記載の非一時的コンピュータストレージ。
- 前記候補動きベクトルのうちの少なくとも1つが、前記第1のビデオユニットに対して時間的に次の参照ビデオユニットに関して定義され、前記候補動きベクトルのうちの少なくとも1つが、前記第1のビデオユニットに対して時間的に前の参照ビデオユニットに関して定義される、請求項38に記載の非一時的コンピュータストレージ。
- 前記既定の動きベクトルから導出された少なくとも1つの候補動きベクトルが、前記既定の動きベクトルをスケーリングすることによって決定され、前記スケーリングが、前記第1のレイヤと前記第2のレイヤとの間の、空間解像度における差分およびフレームレートにおける差分のうちの少なくとも1つに基づく、請求項38に記載の非一時的コンピュータストレージ。
- 前記第1のビデオユニットについての前記予測が、前記選択された候補に対応する前記予測仮説を平均化し、0、1、または2のラウンディングオフセットを適用することによって少なくとも部分的に決定される、請求項38に記載の非一時的コンピュータストレージ。
Applications Claiming Priority (7)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201261680507P | 2012-08-07 | 2012-08-07 | |
| US61/680,507 | 2012-08-07 | ||
| US201261706649P | 2012-09-27 | 2012-09-27 | |
| US61/706,649 | 2012-09-27 | ||
| US13/958,262 US9635356B2 (en) | 2012-08-07 | 2013-08-02 | Multi-hypothesis motion compensation for scalable video coding and 3D video coding |
| US13/958,262 | 2013-08-02 | ||
| PCT/US2013/053627 WO2014025692A1 (en) | 2012-08-07 | 2013-08-05 | Multi-hypothesis motion compensation for scalable video coding and 3d video coding |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015529065A true JP2015529065A (ja) | 2015-10-01 |
| JP2015529065A5 JP2015529065A5 (ja) | 2018-05-10 |
Family
ID=50066179
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2015526609A Pending JP2015529065A (ja) | 2012-08-07 | 2013-08-05 | スケーラブルビデオコーディングおよび3dビデオコーディングのための多重仮説動き補償 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9635356B2 (ja) |
| JP (1) | JP2015529065A (ja) |
| CN (1) | CN104521237B (ja) |
| WO (1) | WO2014025692A1 (ja) |
Families Citing this family (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103283237B (zh) * | 2010-12-22 | 2017-03-22 | Lg电子株式会社 | 帧内预测方法和使用该方法的设备 |
| TWI617180B (zh) * | 2012-03-20 | 2018-03-01 | 三星電子股份有限公司 | 基於樹狀結構之編碼單元的可調式視訊編碼的方法與裝置以及基於樹狀結構之編碼單元的可調式視訊解碼的方法與裝置 |
| WO2014015807A1 (en) * | 2012-07-27 | 2014-01-30 | Mediatek Inc. | Method of constrain disparity vector derivation in 3d video coding |
| WO2014050675A1 (ja) * | 2012-09-28 | 2014-04-03 | ソニー株式会社 | 画像処理装置および方法 |
| CN109068136B (zh) | 2012-12-18 | 2022-07-19 | 索尼公司 | 图像处理装置和图像处理方法、计算机可读存储介质 |
| KR20140121315A (ko) | 2013-04-04 | 2014-10-15 | 한국전자통신연구원 | 참조 픽처 리스트를 이용한 다 계층 기반의 영상 부호화/복호화 방법 및 그 장치 |
| US9635371B2 (en) * | 2013-05-31 | 2017-04-25 | Qualcomm Incorporated | Determining rounding offset using scaling factor in picture resampling |
| EP2838268B1 (en) * | 2013-07-31 | 2019-02-20 | Axis AB | Method, device and system for producing a merged digital video sequence |
| CN111193930B (zh) * | 2013-12-16 | 2021-11-30 | 浙江大学 | 一种前向双假设编码图像块的编解码方法和装置 |
| US9813654B2 (en) * | 2014-08-19 | 2017-11-07 | Sony Corporation | Method and system for transmitting data |
| WO2017003063A1 (ko) * | 2015-06-28 | 2017-01-05 | 엘지전자(주) | 인터 예측 모드 기반 영상 처리 방법 및 이를 위한 장치 |
| KR102390162B1 (ko) * | 2015-10-16 | 2022-04-22 | 삼성전자주식회사 | 데이터 인코딩 장치 및 데이터 인코딩 방법 |
| CN112236995A (zh) | 2018-02-02 | 2021-01-15 | 苹果公司 | 多假设运动补偿技术 |
| US11924440B2 (en) | 2018-02-05 | 2024-03-05 | Apple Inc. | Techniques of multi-hypothesis motion compensation |
| WO2019229683A1 (en) * | 2018-05-31 | 2019-12-05 | Beijing Bytedance Network Technology Co., Ltd. | Concept of interweaved prediction |
| US11477474B2 (en) * | 2018-06-08 | 2022-10-18 | Mediatek Inc. | Methods and apparatus for multi-hypothesis mode reference and constraints |
| CN110620933B (zh) * | 2018-06-19 | 2022-05-31 | 北京字节跳动网络技术有限公司 | 不同参考列表的不同精度 |
| WO2020011775A1 (en) * | 2018-07-10 | 2020-01-16 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Multi-hypothesis prediction |
| US11051010B2 (en) | 2018-07-18 | 2021-06-29 | Mediatek Inc. | Merge candidates with multiple hypothesis |
| US11218721B2 (en) | 2018-07-18 | 2022-01-04 | Mediatek Inc. | Method and apparatus of motion compensation bandwidth reduction for video coding system utilizing multi-hypothesis |
| TWI815967B (zh) | 2018-09-19 | 2023-09-21 | 大陸商北京字節跳動網絡技術有限公司 | 仿射模式編解碼的模式相關自適應調整運動矢量分辨率 |
| BR112021007509A2 (pt) * | 2018-10-27 | 2021-07-27 | Huawei Technologies Co., Ltd. | lista de mesclagem separada para candidatos de mesclagem de sub-bloco e harmonização de técnicas intra-inter para codificação de vídeo |
| JP7358473B2 (ja) | 2018-11-29 | 2023-10-10 | ホアウェイ・テクノロジーズ・カンパニー・リミテッド | 多仮説予測を用いたブロックのための最確モードリスト構成のエンコーダ、デコーダ、および対応する方法 |
| CN112806002A (zh) * | 2018-12-13 | 2021-05-14 | 腾讯美国有限责任公司 | 用信号通知用于跳过和合并模式的多假设的方法和装置、以及用信号通知具有运动矢量差的合并中的距离偏移表的方法和装置 |
| WO2020140948A1 (en) | 2019-01-02 | 2020-07-09 | Beijing Bytedance Network Technology Co., Ltd. | Motion vector derivation between dividing patterns |
| EP3895429A4 (en) | 2019-01-31 | 2022-08-10 | Beijing Bytedance Network Technology Co., Ltd. | CONTEXT FOR CODE AN ADAPTIVE MOTION VECTOR RESOLUTION IN AFFINE MODE |
| CN111698500B (zh) * | 2019-03-11 | 2022-03-01 | 杭州海康威视数字技术股份有限公司 | 一种编解码方法、装置及其设备 |
| US11509931B2 (en) * | 2019-06-07 | 2022-11-22 | Tencent America LLC | Method and apparatus for video coding |
| WO2023200382A1 (en) * | 2022-04-12 | 2023-10-19 | Telefonaktiebolaget Lm Ericsson (Publ) | Enhanced multi-hypothesis prediction |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2012045886A1 (en) * | 2010-10-08 | 2012-04-12 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Picture coding supporting block partitioning and block merging |
Family Cites Families (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7003035B2 (en) * | 2002-01-25 | 2006-02-21 | Microsoft Corporation | Video coding methods and apparatuses |
| US8442108B2 (en) * | 2004-07-12 | 2013-05-14 | Microsoft Corporation | Adaptive updates in motion-compensated temporal filtering |
| US20060012719A1 (en) * | 2004-07-12 | 2006-01-19 | Nokia Corporation | System and method for motion prediction in scalable video coding |
| CN101023672A (zh) * | 2004-07-12 | 2007-08-22 | 诺基亚公司 | 在可调整视频编码中用于运动预测的系统和方法 |
| WO2007042063A1 (en) | 2005-10-12 | 2007-04-19 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Video codec supporting quality-scalability |
| US20080089411A1 (en) | 2006-10-16 | 2008-04-17 | Nokia Corporation | Multiple-hypothesis cross-layer prediction |
| US20080095238A1 (en) * | 2006-10-18 | 2008-04-24 | Apple Inc. | Scalable video coding with filtering of lower layers |
| ES2634162T3 (es) * | 2007-10-25 | 2017-09-26 | Nippon Telegraph And Telephone Corporation | Método de codificación escalable de vídeo y métodos de decodificación que utilizan predicción ponderada, dispositivos para ello, programas para ello, y medio de grabación donde se graba el programa |
| KR101385884B1 (ko) * | 2008-01-30 | 2014-04-16 | 고려대학교 산학협력단 | 다시점 동영상의 부호화 및 복호화 방법 및 장치 |
| EP2269379B1 (en) * | 2008-04-11 | 2019-02-27 | InterDigital Madison Patent Holdings | Methods and apparatus for template matching prediction (tmp) in video encoding and decoding |
| US20110176611A1 (en) * | 2010-01-15 | 2011-07-21 | Yu-Wen Huang | Methods for decoder-side motion vector derivation |
| WO2011095259A1 (en) | 2010-02-05 | 2011-08-11 | Telefonaktiebolaget L M Ericsson (Publ) | Selecting predicted motion vector candidates |
| CN103155568B (zh) | 2010-07-08 | 2016-07-27 | 杜比实验室特许公司 | 用于使用参考处理信号进行多层图像和视频传输的系统和方法 |
| EP2625854A1 (en) | 2010-10-08 | 2013-08-14 | Dolby Laboratories Licensing Corporation | Scalable frame compatible multiview encoding and decoding methods |
| CN103155559B (zh) | 2010-10-12 | 2016-01-06 | 杜比实验室特许公司 | 用于帧兼容视频传输的联合层优化 |
| US9143795B2 (en) * | 2011-04-11 | 2015-09-22 | Texas Instruments Incorporated | Parallel motion estimation in video coding |
-
2013
- 2013-08-02 US US13/958,262 patent/US9635356B2/en active Active
- 2013-08-05 WO PCT/US2013/053627 patent/WO2014025692A1/en active Application Filing
- 2013-08-05 CN CN201380041593.XA patent/CN104521237B/zh not_active Expired - Fee Related
- 2013-08-05 JP JP2015526609A patent/JP2015529065A/ja active Pending
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2012045886A1 (en) * | 2010-10-08 | 2012-04-12 | Fraunhofer-Gesellschaft zur Förderung der angewandten Forschung e.V. | Picture coding supporting block partitioning and block merging |
Non-Patent Citations (2)
| Title |
|---|
| DANNY HONG ET AL., SCALABILITY SUPPORT IN HEVC, JPN6013027194, 14 July 2011 (2011-07-14) * |
| JAEHYUN LIM ET AL., EXTENDED MERGING SCHEME USING MOTION-HYPOTHESIS INTER PREDICTION, JPN6017009746, 21 July 2010 (2010-07-21) * |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2014025692A1 (en) | 2014-02-13 |
| US9635356B2 (en) | 2017-04-25 |
| CN104521237A (zh) | 2015-04-15 |
| CN104521237B (zh) | 2018-06-12 |
| US20140044179A1 (en) | 2014-02-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9635356B2 (en) | Multi-hypothesis motion compensation for scalable video coding and 3D video coding | |
| CN110741639B (zh) | 视频译码中的运动信息传播 | |
| CN107409225B (zh) | 视频译码中运动信息推导模式确定 | |
| US9998727B2 (en) | Advanced inter-view residual prediction in multiview or 3-dimensional video coding | |
| US9826244B2 (en) | Device and method for scalable coding of video information based on high efficiency video coding | |
| US9736489B2 (en) | Motion vector determination for video coding | |
| CN110089116B (zh) | 通过光照补偿和整数运动向量限制进行编码优化 | |
| US9491458B2 (en) | Scalable video coding prediction with non-causal information | |
| US10097825B2 (en) | Restricting inter-layer prediction based on a maximum number of motion-compensated layers in high efficiency video coding (HEVC) extensions | |
| US20130188717A1 (en) | Motion prediction in svc using partition mode without split flag | |
| CN111213376A (zh) | 使用基于编码结构的候选列表构建对视频数据的运动信息进行编码 | |
| US20140064359A1 (en) | Intra prediction most probable mode order improvement for scalable video coding | |
| TW201401884A (zh) | 視訊寫碼之層間合併清單建立 | |
| WO2013106425A1 (en) | Motion vector scaling in video coding | |
| US9380307B2 (en) | Method and system for intra base layer (BL) transform in video coding | |
| US9648353B2 (en) | Multiple base layer reference pictures for SHVC | |
| US9338452B2 (en) | Motion vector difference coding extension for enhancement layer | |
| JP6526574B2 (ja) | レイヤ間シンタックス予測制御 | |
| US20130336394A1 (en) | Inferred base layer block for texture_bl mode in hevc based single loop scalable video coding | |
| WO2013184810A1 (en) | Bi-layer texture prediction for video coding | |
| JP2016533119A (ja) | サブpuレベル高度残差予測 | |
| US9479788B2 (en) | Systems and methods for low complexity encoding and background detection |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160706 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170313 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170328 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170523 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170926 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20171226 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20180226 |
|
| A524 | Written submission of copy of amendment under article 19 pct |
Free format text: JAPANESE INTERMEDIATE CODE: A524 Effective date: 20180326 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20180717 |