JP2015114159A - 回転信号処理回路 - Google Patents
回転信号処理回路 Download PDFInfo
- Publication number
- JP2015114159A JP2015114159A JP2013255240A JP2013255240A JP2015114159A JP 2015114159 A JP2015114159 A JP 2015114159A JP 2013255240 A JP2013255240 A JP 2013255240A JP 2013255240 A JP2013255240 A JP 2013255240A JP 2015114159 A JP2015114159 A JP 2015114159A
- Authority
- JP
- Japan
- Prior art keywords
- rotation
- signal
- processing circuit
- signal processing
- signals
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images




Landscapes
- Transmission And Conversion Of Sensor Element Output (AREA)
Abstract
【課題】回転体が両方向に回転可能であり、入力される第1と第2の回転信号に設定からの位相ズレがあっても補正可能で、回転体の角度検出誤差が生じない回転信号処理回路を提供する。
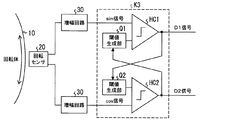
【解決手段】回転に伴った所定の周期で振幅が連続的に変化する第1の回転信号と、第1の回転信号と位相差α(45°<α<135°)を持って変化する第2の回転信号を、それぞれ、HC1,HC2を用いて角度位置情報を含んだD1,D2信号に変換する回転信号処理回路であって、第1の回転信号を変換するHC1の2つの閾値レベルが、第2の回転信号を変換するHC2のD2信号によって切り替えられ、第2の回転信号を変換するHC2の2つの閾値レベルが、第1の回転信号を変換するHC1のD1信号によって切り替えられるように構成されてなる回転信号処理回路K3とする。
【選択図】図1
【解決手段】回転に伴った所定の周期で振幅が連続的に変化する第1の回転信号と、第1の回転信号と位相差α(45°<α<135°)を持って変化する第2の回転信号を、それぞれ、HC1,HC2を用いて角度位置情報を含んだD1,D2信号に変換する回転信号処理回路であって、第1の回転信号を変換するHC1の2つの閾値レベルが、第2の回転信号を変換するHC2のD2信号によって切り替えられ、第2の回転信号を変換するHC2の2つの閾値レベルが、第1の回転信号を変換するHC1のD1信号によって切り替えられるように構成されてなる回転信号処理回路K3とする。
【選択図】図1
Description
本発明は、回転体の回転に伴った所定の周期で振幅が連続的に変化する第1の回転信号および該第1の回転信号と位相差を持って変化する第2の回転信号を、それぞれ、回転体の角度位置情報を含んだデジタル信号に変換して出力する回転信号処理回路に関する。
回転体の回転に伴ったsin信号とcos信号をA/D変換器でデジタル信号に変換し、このデジタル信号から回転体の回転角度位置を算出する回転角度位置検出装置が、例えば、特開2012−112897号公報(特許文献1)に開示されている。上記A/D変換器のように、回転体の回転に伴ったsin信号とcos信号をデジタル信号に変換して出力する回転信号処理回路として最も簡単な構成は、ヒステリシスコンパレータ(以下、HCと記載)を用いるものである。
図9は、回転体10の回転に伴うsin信号とcos信号の検出からデジタル信号に変換するまでの構成を示すブロック図で、上記のHCを用いた従来の回転信号処理回路K1,K2を示した図である。
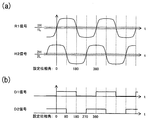
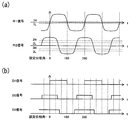
図10の(a)は、図9のHC1,HC2にそれぞれ入力される位相ズレのない理想的なsin信号とcos信号の電圧波形を示した図である。また、(b)は、HC1,HC2からそれぞれ出力されるD1信号とD2信号の電圧波形を示した図である。
図9において破線で囲った回転信号処理回路K1,K2は、回転体10の回転信号としてそれぞれsin信号とcos信号を入力し、デジタルのD1信号とD2信号に変換して出力する。回転信号処理回路K1,K2は、それぞれ基準電圧入力端子に閾値生成部P1,P2が接続されたHC1,HC2からなる。また、回転体10の回転状態を検出する回転センサ20は、例えば90°の位相差が出るように配置された2個の磁気抵抗素子で構成され、回転体10の回転に伴ってsin信号とcos信号を出力する。そして、この回転センサ20から出力されるsin信号とcos信号が、増幅回路30で増幅されて、HC1,HC2の各信号入力端子に入力される。
HC1,HC2は、ノイズが乗った入力信号にも安定した出力が得られるように、それぞれ、閾値生成部P1,P2で2つの閾値レベルが切り替え可能に構成されている。そして、回転信号処理回路K1,K2のHC1,HC2では、それぞれ、入力されるsin信号やcos信号が一方の閾値レベルを横切った瞬間にD1信号やD2信号の出力レベルが切り替わり、該出力レベルの切り替わりで閾値レベルがもう一方に切り替わる。
図10の(a)に示したノイズや位相ズレのない理想的なsin信号とcos信号が入力される場合には、上記したHC1,HC2の2つの閾値レベルの切り替え機能は特に必要なく、一つの閾値レベルが設定される単純なコンパレータで十分である。すなわち、(a)の理想的なsin信号やcos信号であれば、閾値レベルを電圧0に設定したコンパレータで、(b)に示したD1信号とD2信号に変換可能である。また、(a)のsin信号やcos信号にわずかなノイズが乗る場合には、電圧0を間に挟んでノイズ振幅よりわずかに大きい2つの閾値レベルをHC1,HC2にそれぞれ設定することで、(b)に示したD1信号とD2信号を安定的に得ることができる。
図9に示した従来の回転信号処理回路K1,K2において、回転体10に対する回転センサ20の配置バラツキ等が原因で、HC1やHC2へ入力されるsin信号やcos信号に設定値からの位相ズレがある場合、次のようになる。
図11は、図9の回転信号処理回路K1,K2において、HC1,HC2へ入力されるsin信号とcos信号の電圧波形に位相ズレがある場合について、HC1,HC2にそれぞれ設定される閾値レベルと出力信号の関係を示したタイミングチャートである。(a)は、回転体10が正回転または一方向に回転する場合であり、(b)は、回転体10が逆回転する場合である。
図11の(a)に示すように、回転体10が一方向だけに正回転する場合、入力されるsin信号とcos信号の電圧波形に設定からの位相ズレがあっても、HC1,HC2の閾値レベルを適切に設定することで、該位相ズレの補正が可能である。(a)では、設定された一点鎖線のsin信号に対して、実際に入力された実線のsin信号は、β1だけ位相が進んでいる。しかしながら、HC1の2つの閾値レベルを図の点線で示した1H,1Lに設定することで、位相ズレのない設定どおりのD1信号を得ることができる。同様に、設定された一点鎖線のcos信号に対して、実際に入力された実線のcos信号は、β2だけ位相が遅れている。しかしながら、HC2の2つの閾値レベルを図の点線で示した2H,2Lに設定することで、位相ズレのない設定どおりのD2信号を得ることができる。尚、図では、1H,1Lおよび2H,2Lの切り替わりのタイミングを上向きの点線矢印で示しており、各時点で実際に動作している閾値レベルを実線で示してある。回転信号処理回路K1,K2では、sin信号およびcos信号が、それぞれ、HC1,HC2の一方の閾値レベルを横切った瞬間に、D1信号およびD2信号の出力レベルが切り替わり、同時に、もう一方の閾値レベルに切り替えられる。(a)に示すHC1,HC2の閾値レベル1H,1Lおよび2H,2Lの設定と上記切り替えのタイミングによって、設定された一点鎖線のsin信号とcos信号にそれぞれ対応する、図のように位相ズレのないD1信号とD2信号が得られる。
次に、同じ構成において回転体10が逆回転する場合、図11の(b)に示すように、位相ズレは補正できない。すなわち、(a)に示した正回転でβ1だけ位相が進んだsin信号が出力される回転センサ20に対して、回転体10を逆回転させると、(b)に示すβ1だけ位相が遅れたsin信号が出力される。同様に、(a)に示した正回転でβ2だけ位相が遅れたcos信号が出力される回転センサ20に対して、回転体10を逆回転させると、(b)に示すβ2だけ位相が進んだcos信号が出力される。この(b)に示すsin信号とcos信号が、2つの閾値レベルとして1H,1Lと2H,2Lがそれぞれ設定されたHC1,HC2に入力されると、上記と同じルールで変換されて、(b)のD1信号とD2信号がそれぞれ出力される。(b)の例では、D2信号は設定からのズレがないが、D1信号は設定からのズレが大きく、回転体10の回転状態の検出に図中に太線の両端矢印で示した角度検出誤差が発生してしまう。
本発明は、所定の周期で振幅が連続的に変化する第1の回転信号と、該第1の回転信号と位相差を持って変化する第2の回転信号を、それぞれ、HCを用いて回転体の角度位置情報を含んだデジタル信号に変換する、簡単な回転信号処理回路を対象としている。そして、回転体が正回転と逆回転の両方向に回転可能であり、入力される第1と第2の回転信号に設定からの位相ズレがあっても該位相ズレを補正可能で、回転体の角度検出誤差が生じない回転信号処理回路を提供することを目的としている。
本発明に係る回転信号処理回路は、回転センサで検出される回転体の回転に伴った所定の周期で振幅が連続的に変化する第1の回転信号と、該第1の回転信号と同じ周期で位相差α(45°<α<135°)を持って変化する第2の回転信号を入力する。そして、該第1と第2の回転信号を、それぞれ、HCを用いて、回転体の角度位置情報を含んだデジタル信号に変換して出力する回転信号処理回路である。また、本発明に係る回転信号処理回路は、次の構成を有している点に特徴がある。すなわち、第1の回転信号を変換するHCの2つの閾値レベルが、第2の回転信号を変換するHCの出力信号によって切り替えられ、第2の回転信号を変換するHCの2つの閾値レベルが、第1の回転信号を変換するHCの出力信号によって切り替えられる構成である。
上記回転信号処理回路は、所定の周期で振幅が連続的に変化する第1の回転信号と、該第1の回転信号と位相差を持って変化する第2の回転信号を入力し、それぞれを、HCを用いてデジタル信号に変換する、最も簡単な構成の回転信号処理回路である。
上記回転信号処理回路は、第1と第2の回転信号をそれぞれ変換するHCの閾値レベルの切り替えを、それぞれのHCが自分自身の出力信号で単独で行うのではなく、他の回転信号を変換するHCの出力信号を用いて行う構成を採用している。第1と第2の回転信号は、互いに位相差α(45°<α<135°)を持っている。従って、回転体の回転方向が反転する場合には、正回転と逆回転で第1と第2の回転信号の位相差αの方向も反転する。上記回転信号処理回路において、第1と第2の回転信号をそれぞれ変換するHCの閾値レベルを他の回転信号を変換するHCの出力信号で切り替える構成は、この第1と第2の回転信号が持つ位相差αについても、正回転と逆回転で反転することを利用している。上記構成によって、第1と第2の回転信号をそれぞれ変換するHCの2つの閾値レベルは、それぞれ、正回転と逆回転で出力信号の反対レベルへの遷移を規定するようなタイミングで働くことになる。従って、上記回転信号処理回路においては、第1と第2の回転信号に設定からの位相ズレがあり、正回転と逆回転で該位相ズレの方向が反転しても、各HCの2つの閾値レベルが規定する役割も反転し、回転体の両方向の回転で該位相ズレの補正が可能となる。
以上のようにして、上記回転信号処理回路は、回転体が正回転と逆回転の両方向に回転可能であり、入力される第1と第2の回転信号に設定からの位相ズレがあっても補正可能で、回転体の角度検出誤差が生じない回転信号処理回路とすることができる。
上記回転信号処理回路は、回転体の回転状態をより精密に把握するため、次の構成としてもよい。すなわち、第1と第2の回転信号のいずれか一方の信号を信号伝達経路で2つの信号に分割して、それぞれを閾値レベルの異なる2つのHCに入力する。そして、分割された2つの信号を、それぞれ回転体の角度位置情報を含んだ異なるデジタル信号に変換して出力する構成である。上記構成において、分割された2つの信号をそれぞれ変換する2つのHCの2つの閾値レベルは、いずれも、第1と第2の回転信号のもう一方の信号を変換するHCの出力信号によって切り替えられる。また、第1と第2の回転信号のもう一方の信号を変換するHCの2つの閾値レベルは、分割された2つの信号をそれぞれ変換する2つのHCのいずれかの出力信号によって切り替えられるように構成する。
上記回転信号処理回路は、回転体が、モータの回転子またはモータで駆動される回転体であり、HCが出力するデジタル信号が、モータの駆動制御に用いられる場合に特に好適である。このようにモータの駆動制御に用いられる回転信号処理回路では、回転体に対する回転センサの配置バラツキ等が原因で設定値からの位相ズレが生じている第1と第2の回転信号に対して、当該回転信号処理回路において位相ズレの補正が必要となるためである。
上記モータは、例えば3相駆動モータであってもよい。この場合には、先に説明した第1と第2の回転信号のいずれか一方を信号伝達経路で分割する回転信号処理回路を用いて、回転体の回転状態を1周期の360°を60°で分割した6つの象限で識別する構成が好適である。
以上のように、上記回転信号処理回路は、第1と第2の回転信号をHCにより回転体の角度位置情報を含んだデジタル信号に変換する、簡単で安価な回転信号処理回路とすることができる。さらには、回転体が正回転と逆回転の両方向に回転可能であり、入力される第1と第2の回転信号に設定からの位相ズレがあっても該位相ズレを補正可能で、回転体の角度検出誤差が生じない回転信号処理回路とすることができる。
従って、上記した回転信号処理回路は、例えば車載用のモータの駆動制御のように、正回転と逆回転の両方で第1と第2の回転信号の位相ズレの補正が必要で、低コストが要求される、車載用として好適である。
以下、本発明を実施するための形態を、図に基づいて説明する。
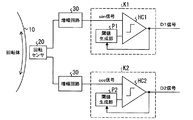
図1は、回転体10の回転に伴うsin信号とcos信号の検出からデジタル信号に変換するまでの構成を示すブロック図で、本発明の一例である回転信号処理回路K3を示した図である。尚、図1に示すブロック図において、図9に示した各ブロックと同様の部分については、同じ符号を付した。
図1において破線で囲って示した回転信号処理回路K3は、回転体10の回転信号としてsin信号とcos信号を入力し、それぞれをデジタルのD1信号とD2信号に変換して出力する。回転信号処理回路K3は、基準電圧入力端子にそれぞれ閾値生成部Q1,Q2が接続されたHC1,HC2からなる。また、回転体10の回転状態を検出する回転センサ20は、例えば90°の位相差が出るように配置された2個の磁気抵抗素子で構成され、回転体10の回転に伴ってsin信号とcos信号を出力する。そして、この回転センサ20から出力されるsin信号とcos信号が、増幅回路30で増幅されて、回転信号処理回路K3のHC1,HC2の各信号入力端子に入力される。
図1に示す回転信号処理回路K3のHC1,HC2は、図9に示した従来の回転信号処理回路K1,K2のHC1,HC2と同じものであるが、閾値生成部Q1,Q2において2つの閾値レベルを切り替える構成が異なっている。図9の回転信号処理回路K1,K2は、HC1,HC2にそれぞれ接続されている閾値生成部P1,P2において、2つの閾値レベルがHC1,HC2の自身の出力信号であるD1信号とD2信号によって切り替えられる構成である。これに対して、図1の回転信号処理回路K3は、sin信号を変換するHC1の2つの閾値レベルが、閾値生成部Q1において、cos信号を変換するHC2の出力信号のD2信号によって切り替えられる。また、cos信号を変換するHC2の2つの閾値レベルが、閾値生成部Q2において、sin信号を変換するHC1の出力信号のD1信号によって切り替えられる構成である。このように、回転信号処理回路K3では、HC1,HC2の基準電圧入力端子にそれぞれ接続された閾値生成部Q1,Q2が生成する2つの閾値レベルが、それぞれ、もう一方のHC2のD2信号,HC1のD1信号で切り替えられる。
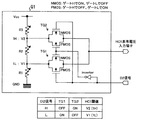
図2は、図1の回転信号処理回路K3においてブロックで示した閾値生成部Q1について、具体的な回路構成の一例を示した図である。
図2に示す閾値生成部Q1は、GNDとVccとの間で、GND側を第1段、Vcc側を第3段として、順次直列接続された3個の抵抗R1〜R3と、TG1とTG2の2個のTGを有してなる構造である。TG1とTG2は、それぞれ、電流端子が並列に接続されたNMOSとPMOSからなり、該NMOSとPMOSのゲート端子にそれぞれ逆レベルの信号が入力される回路である。TG1は、電流端子の一方が第1段と第2段の抵抗R1,R2の接続点に接続され、TG2は、電流端子の一方が第2段と第3段の抵抗R2,R3の接続点に接続される。TG1とTG2のもう一方の電流端子は、共通接続されて、HC1の基準電圧入力端子に接続される。また、TG1とTG2から選択される2組の逆チャネルのMOSFETのゲート端子同士は、それぞれ共通接続される。そして、HC1の閾値レベルを切り替えるHC2の出力信号のD2信号とその反転信号が、共通接続された2組の逆チャネルのMOSFETのゲート端子にそれぞれ印加されるように構成されている。そして、下方の表に示したように、閾値生成部Q1は、HC1に対して、D2信号がHレベルで電圧V2の閾値レベル1Hを生成し、D2信号がLレベルで電圧V1の閾値レベル1Lを生成する。尚、電圧V1,V2の値は、後述するように、sin信号の設定からの位相ズレを補正するように、適宜調整される。
図1の回転信号処理回路K3において、HC2の基準電圧入力端子に接続されている閾値生成部Q2も基本的に図2の閾値生成部Q1と同じ構成であるが、次の点で図2の閾値生成部Q1と異なっている。すなわち、TG1とTG2の共通接続されている電流端子がHC2の基準電圧入力端子に接続される点と、HC1のD1信号とその反転信号が、共通接続された2組の逆チャネルのMOSFETのゲート端子にそれぞれ印加される点である。従って、回転信号処理回路K3において、HC2の基準電圧入力端子に接続されている閾値生成部Q2は、HC2に対して、D1信号がHレベルで閾値レベル2Hを生成し、D1信号がLレベルで閾値レベル2Lを生成する。また、閾値生成部P2は、HC2に対して、D2信号がHレベルで閾値レベル2Lを生成し、D2信号がLレベルで閾値レベル2Hを生成する。
一方、図9の回転信号処理回路K1,K2では、図11に示したタイミングチャートからもわかるように、閾値生成部P1は、HC1に対して、D1信号がHレベルで閾値レベル1Lを生成し、D1信号がLレベルで閾値レベル1Hを生成する。同様に、閾値生成部P2は、HC2に対して、D2信号がHレベルで閾値レベル2Lを生成し、D2信号がLレベルで閾値レベル2Hを生成する。閾値生成部P1の具体的な回路構成は、例えば、図2に示した閾値生成部Q1の回路構成において入力をD1信号に変更し、インバータの挿入を分岐されたもう一方の経路に代えた回路に対応する。
図3は、図1の回転信号処理回路K3において、HC1,HC2へ入力されるsin信号とcos信号の電圧波形にそれぞれ位相ズレがある場合について、HC1,HC2にそれぞれ設定される閾値レベルと出力信号の関係を示したタイミングチャートである。(a)は、回転体10が正回転または一方向に回転する場合であり、(b)は、回転体10が逆回転する場合である。尚、図3に示す回転信号処理回路K3のタイミングチャートは、図11に示した回転信号処理回路K1,K2のタイミングチャートと対応しており、sin信号とcos信号の電圧波形は、どちらも同じ位相ズレを有している。
図3(a)に示すように、回転信号処理回路K3では、先の回転信号処理回路K1,K2の場合と同様にして、sin信号とcos信号に設定からの位相ズレがあっても、HC1,HC2の閾値レベルを適切に設定することで、該位相ズレの補正が可能である。(a)の正回転では、設定された一点鎖線のsin信号に対して、実際に入力された実線のsin信号は、β1だけ位相が進んでいる。しかしながら、HC1の2つの閾値レベルを図の点線で示した1H,1Lに設定することで、位相ズレのない設定どおりのD1信号を得ることができる。同様に、設定された一点鎖線のcos信号に対して、実際に入力された実線のcos信号は、β2だけ位相が遅れている。しかしながら、HC2の2つの閾値レベルを図の点線で示した2H,2Lに設定することで、位相ズレのない設定どおりのD2信号を得ることができる。尚、図11(a)に示したタイミングチャートと異なり、図3(a)のタイミングチャートでは、sin信号を変換するHC1の2つの閾値レベルが、HC2の出力信号のD2信号によって切り替えられる。D2信号がHレベルで閾値レベル1Hとなり、D2信号がLレベルで閾値レベル1Lとなる。また、cos信号を変換するHC2の2つの閾値レベルが、HC1の出力信号のD1信号によって切り替えられる。D1信号がHレベルで閾値レベル2Hとなり、D1信号がLレベルで閾値レベル2Lとなる。このHC1,HC2の閾値レベル1H,1Lおよび2H,2Lの設定と上記切り替えのタイミングによっても、設定された一点鎖線のsin信号とcos信号にそれぞれ対応する、図のように位相ズレのないD1信号とD2信号が得られる。
一方、先の回転信号処理回路K1,K2では、図11(b)に示したように、回転体10が逆回転する場合には、位相ズレが補正できず、図中に太線の両端矢印で示した角度検出誤差が発生した。これに対して、図3(b)に示す回転信号処理回路K3のタイミングチャートでは、回転体10が逆回転する場合においても、位相ズレが補正され、位相ズレのない設定どおりのD1信号とD2信号を得ることができる。この両者の違いを、以下でより詳細に説明する。
図11に示した回転信号処理回路K1,K2の逆回転のタイミングチャートでは、(b)の位相ズレβ1の方向が反転したsin信号に対して、HC1の2つの閾値レベル1H,1Lの役割が、(a)の正回転の場合と変わっていない。すなわち、正回転と逆回転のどちらの場合においても、閾値レベル1HはD1信号の立ち上がりの遷移を規定し、閾値レベル1LはD1信号の立ち下がりの遷移を規定する。このため、図中に太線の両端矢印で示した角度検出誤差が発生した。一方、sin信号と90°の位相差があるcos信号に対しては、HC2の2つの閾値レベル2H,2Lの役割が、(a)の正回転の場合と(b)の逆回転の場合で変わっている。すなわち、正回転の場合には、閾値レベル2HはD2信号の立ち下がりの遷移を規定し、閾値レベル2LはD2信号の立ち上がりの遷移を規定する。これに対して、逆回転の場合には、閾値レベル2HはD2信号の立ち上がりの遷移を規定し、閾値レベル2LはD2信号の立ち下がりの遷移を規定する。このHC2の2つの閾値レベル2H,2Lの役割が正回転と逆回転で変わることで、位相ズレβ2の方向が正回転と逆回転で反転しても該位相ズレを補正することができ、角度検出誤差が発生していない。
図1の回転信号処理回路K3は、HC1,HC2の2つの閾値レベルがそれぞれもう一方のHC2のD2信号,HC1のD1信号で切り替えられる構成とすることで、該2つの閾値レベルの役割が、正回転と逆回転で変わるようにしている。すなわち、図3に示すように、sin信号を変換するHC1において、(a)の正回転の場合には、閾値レベル1HがD1信号の立ち上がりの遷移を規定し、閾値レベル1LがD1信号の立ち下がりの遷移を規定する。これに対して、(b)の逆回転の場合には、閾値レベル1HがD1信号の立ち下がりの遷移を規定し、閾値レベル1LがD1信号の立ち上がりの遷移を規定する。また、cos信号を変換するHC2において、(a)の正回転の場合には、閾値レベル2HがD2信号の立ち下がりの遷移を規定し、閾値レベル2LがD2信号の立ち上がりの遷移を規定する。これに対して、(b)の逆回転の場合には、閾値レベル2HがD2信号の立ち上がりの遷移を規定し、閾値レベル2LがD2信号の立ち下がりの遷移を規定する。このように、回転信号処理回路K3では、HC1,HC2において2つの閾値レベルの役割が正回転と逆回転で変わることで、sin信号とcos信号のいずれにおいても正回転と逆回転で位相ズレが補正され、角度検出誤差が発生しないようになっている。
上記の図1〜図3で例示した回転信号処理回路K3は、入力される回転信号がsin信号とcos信号に限定されない、次のような回転信号処理回路に一般化することができる。すなわち、回転センサで検出される回転体の回転に伴った所定の周期で振幅が連続的に変化する第1の回転信号と、該第1の回転信号と同じ周期で位相差α(45°<α<135°)を持って変化する第2の回転信号を入力する。そして、該第1と第2の回転信号を、それぞれ、HCを用いて、回転体の角度位置情報を含んだデジタル信号に変換して出力する回転信号処理回路である。
上記回転信号処理回路は、所定の周期で振幅が連続的に変化する第1の回転信号と、該第1の回転信号と位相差を持って変化する第2の回転信号を入力し、それぞれを、HCを用いてデジタル信号に変換する、最も簡単な構成の回転信号処理回路である。
回転センサで検出され、HCに入力される回転体の回転に伴った上記第1と第2の回転信号は、回転体に対する回転センサの配置バラツキ等が原因で、設定値からの位相ズレが生じる場合がある。課題欄で説明したように、HCを用いた従来の回転信号処理回路では、回転体が一方向だけに正回転する場合、入力される第1と第2の回転信号に設定からの位相ズレがあっても、HCの閾値レベルを適切に設定することで、該位相ズレの補正が可能である。一方、同じ構成において回転体が逆回転する場合、位相ズレは補正できず、回転体の回転状態の検出に角度検出誤差が発生してしまう。
従来の回転信号処理回路において上記角度検出誤差が発生する理由は、HCの次のような動作に起因している。すなわち、正回転時には、回転信号の位相ズレを補正するように、該位相ズレと逆方向のタイミングで出力レベルが切り替わるように、閾値レベルを設定する。これが、逆回転時には位相ズレの方向が反転することによって、位相ズレをさらに助長したタイミングで出力レベルを切り替えるように働くためである。図11の例では、(a)の正回転時において、設定よりβ1だけ位相が進んだsin信号に対して、1H,1Lの閾値レベルでHC1の切り替えのタイミングをβ1だけ遅らせることで、設定どおりのD1信号を得ていた。これが、(b)の逆回転時では、設定よりβ1だけ位相が遅れたsin信号に対して、さらに遅れたタイミングでD1信号の出力レベルが切り替わるためである。
そこで、上記回転信号処理回路は、第1と第2の回転信号をそれぞれ変換するHCの閾値レベルの切り替えを、それぞれのHCが自分自身の出力信号で単独で行うのではなく、他の回転信号を変換するHCの出力信号を用いて行う構成を採用している。すなわち、第1の回転信号を変換するHCの2つの閾値レベルが、第2の回転信号を変換するHCの出力信号によって切り替えられ、第2の回転信号を変換するHCの2つの閾値レベルが、第1の回転信号を変換するHCの出力信号によって切り替えられる構成である。
第1と第2の回転信号は、互いに位相差α(45°<α<135°)を持っている。従って、回転体の回転方向が反転する場合には、正回転と逆回転で第1と第2の回転信号の位相差αの方向も反転する。例えば、理想的なsin信号とcos信号は90°の位相差を持っており、正回転でsin信号がcos信号に対して90°進んでいる場合、逆回転ではsin信号はcos信号に対して90°遅れる。上記回転信号処理回路において、第1と第2の回転信号をそれぞれ変換するHCの閾値レベルを他の回転信号を変換するHCの出力信号で切り替える構成は、この第1と第2の回転信号が持つ位相差αについても、正回転と逆回転で反転することを利用している。上記構成によって、第1と第2の回転信号をそれぞれ変換するHCの2つの閾値レベルは、それぞれ、正回転と逆回転で出力信号の反対レベルへの遷移を規定するようなタイミングで働くことになる。例えば、正回転でHCの出力信号の立ち上がりがHレベルの閾値、立ち下がりがLレベルの閾値で規定されるように設定した場合、逆回転ではHCの出力信号の立ち上がりがLレベルの閾値、立ち下がりがHレベルの閾値で規定されるタイミングで働くようになる。従って、上記回転信号処理回路においては、第1と第2の回転信号に設定からの位相ズレがあり、正回転と逆回転で該位相ズレの方向が反転しても、各HCの2つの閾値レベルが規定する役割も反転し、回転体の両方向の回転で該位相ズレの補正が可能となる。
図4は、一般化された第1と第2の回転信号の一例を示す図で、(a)は、sin信号とcos信号の振幅が変形した位相ズレのないR1信号とR2信号の電圧波形と、HC1,HC2で設定される閾値レベル1H,1L,2H,2Lを示した図である。また、(b)は、HC1,HC2から出力されるD1,D2信号の電圧波形を示した図である。
図4のR1信号とR2信号について設定からの位相ズレがあっても、図1〜図3で例示した回転信号処理回路K3と同様にして、正回転と逆回転で位相ズレを補正できることは言うまでもない。
以上のようにして、上記回転信号処理回路は、回転体が正回転と逆回転の両方向に回転可能であり、入力される第1と第2の回転信号に設定からの位相ズレがあっても補正可能で、回転体の角度検出誤差が生じない回転信号処理回路とすることができる。
次に、図1〜図3に示した回転信号処理回路K3の変形例について説明する。
図5は、図1に示した回転信号処理回路K3の変形例で、回転体10の回転に伴うsin信号とcos信号の検出からデジタル信号に変換するまでの構成を示すブロック図で、回転信号処理回路K4を示した図である。尚、図5に示すブロック図において、図1に示した各ブロックと同様の部分については、同じ符号を付した。
また、図6は、図5に示した回転信号処理回路K4において、入力されるsin信号とcos信号の電圧波形にそれぞれ位相ズレがある場合について、HC1〜HC3にそれぞれ設定される閾値レベルと出力信号の関係を示したタイミングチャートである。(a)は、回転体10aが正回転または一方向に回転する場合であり、(b)は、回転体10aが逆回転する場合である。
図5に示す回転信号処理回路K4は、回転体10の回転状態をより精密に把握するため、図1に示した回転信号処理回路K3の構成に対して、HC3と閾値生成部Q3を追加した構成となっている。すなわち、回転センサ20から出力されるcos信号を信号伝達経路で2つの信号に分割して、それぞれを閾値レベルの異なるHC2とHC3に入力する。そして、分割された2つのcos信号を、それぞれ回転体10の角度位置情報を含んだ異なるデジタル信号のD2信号とD3信号に変換して出力する構成である。上記構成において、分割された2つのcos信号をそれぞれ変換するHC2とHC3の2つの閾値レベルは、いずれも、sin信号を変換するHC1の出力信号のD1信号によって切り替えられる。また、sin信号を変換するHC1の2つの閾値レベルは、分割された2つのcos信号をそれぞれ変換するHC2とHC3のうち、HC2の出力信号のD2信号によって切り替えられる。尚、sin信号を変換するHC1の2つの閾値レベルを、HC3の出力信号のD3信号によって切り替えるように構成することも可能である。
図6に示すように、図5の回転信号処理回路K4では、先の回転信号処理回路K1〜K3の場合と同様にして、sin信号とcos信号に設定からの位相ズレがあっても、HC1〜HC3の閾値レベルを適切に設定することで、該位相ズレの補正が可能である。(a)の正回転では、設定された一点鎖線のsin信号に対して、実際に入力された実線のsin信号は、β3だけ位相が進んでいる。しかしながら、HC1の2つの閾値レベルを図の点線で示した1H,1Lに設定することで、位相ズレのない設定どおりのD1信号を得ることができる。同様に、設定された一点鎖線のcos信号に対して、実際に入力された実線のcos信号は、β4だけ位相が遅れている。しかしながら、HC2,HC3のそれぞれの2つの閾値レベルを図の点線で示した2H,2Lおよび3H,3Lに設定することで、位相ズレのない設定どおりのD2信号とD3信号を得ることができる。
尚、図3に示した回転信号処理回路K3のタイミングチャートでは、HC1,HC2のそれぞれの2つの閾値レベルを、sin信号とcos信号の電圧0を挟んだ1H,1Lおよび2H,2Lに設定していた。これは、HC1,HC2でそれぞれ変換されたD1信号とD2信号の出力レベルの組が4種類の組み合わせとなることから、1周期(360°)を均等に4分割し、回転体10の回転状態を直交座標の90°で区分された4つの象限で均等に識別するためである。これに対して、図6に示した回転信号処理回路K4のタイミングチャートでは、cos信号を変換するHC2,HC3のそれぞれの2つの閾値レベルを、cos信号の正電位側に2H,2Lを設定し、負電位側に3H,3Lを設定している。これは、HC1,HC2,HC3でそれぞれ変換されたD1信号,D2信号,D3信号の出力レベルの組によって1周期(360°)を均等に6分割し、回転体10の回転状態を直交座標の60°で区分された6つの象限で均等に識別するためである。尚、3つのHCを用いる回転信号処理回路では、それぞれのHCで変換された出力レベルの組は8種類の組み合わせとなり、最大で、1周期(360°)を均等に8分割し、回転体の回転状態を直交座標の45°で区分された8つの象限で識別可能である。
図6(a)に示す正回転のタイミングチャートでは、sin信号を変換するHC1の2つの閾値レベルがHC2の出力信号のD2信号によって切り替えられ、D2信号がHレベルで閾値レベル1Lとなり、D2信号がLレベルで閾値レベル1Hとなる。これによって、閾値レベル1HがD1信号の立ち上がりの遷移を規定し、閾値レベル1LがD1信号の立ち下がりの遷移を規定する。また、cos信号を変換するHC2,HC3の2つの閾値レベルがHC1の出力信号のD1信号によって同時に切り替えられ、D1信号がHレベルで閾値レベル2L,3Lとなり、D1信号がLレベルで閾値レベル2H,3Hとなる。これによって、閾値レベル2H,3HがD2信号とD3信号の立ち下がりの遷移を規定し、閾値レベル2L,3LがそれぞれD2信号とD3信号の立ち上がりの遷移を規定する。これらHC1〜HC3の閾値レベル1H,1L,2H,2L,3H,3Lの設定と上記切り替えのタイミングによって、設定された一点鎖線のsin信号とcos信号にそれぞれ対応する、図のように位相ズレのないD1〜D3信号が得られる。
また、図6(b)に示す逆回転のタイミングチャートでは、sin信号を変換するHC1の電圧0を挟んだ2つの閾値レベルは、D2信号レベルとの対応が反転して、D2信号がHレベルで閾値レベル1Hとなり、D2信号がLレベルで閾値レベル1Lとなる。また、閾値レベル1HがD1信号の立ち下がりの遷移を規定し、閾値レベル1LがD1信号の立ち上がりの遷移を規定するようになる。これによって、設定された一点鎖線のsin信号とcos信号にそれぞれ対応する、図のような位相ズレのないD1〜D3信号が得られる。一方、cos信号を変換するHC2の正電位側の2H,2LとHC3の負電位側の3H,3Lは、逆回転でもD1信号レベルとの対応が変化せず、D1信号がHレベルで閾値レベル2L,3Lであり、D1信号がLレベルで閾値レベル2H,3Hとなる。また、逆回転でもHC2,HC3の2つの閾値レベルの役割が変化せず、閾値レベル2H,3HがD2信号とD3信号の立ち下がりの遷移を規定し、閾値レベル2L,3LがそれぞれD2信号とD3信号の立ち上がりの遷移を規定する。この場合にも、設定された一点鎖線のsin信号とcos信号にそれぞれ対応する、図のような位相ズレのないD1〜D3信号が得られる。
上記の図5と図6で例示した回転信号処理回路K4は、前述した図1〜図3の回転信号処理回路K3から一般化される回転信号処理回路を基にして、次のような回転信号処理回路に一般化することができる。所定の周期で振幅が連続的に変化する第1の回転信号と、該第1の回転信号と位相差α(45°<α<135°)を持って変化する第2の回転信号のいずれか一方を、信号伝達経路で2つの信号に分割し、それぞれを閾値レベルの異なる2つのHCに入力する。そして、分割された2つの信号を、それぞれ回転体の角度位置情報を含んだ異なるデジタル信号に変換して出力する構成である。上記構成において、分割された2つの信号をそれぞれ変換する2つのHCの2つの閾値レベルは、いずれも、第1と第2の回転信号のもう一方の信号を変換するHCの出力信号によって切り替えられる。また、第1と第2の回転信号のもう一方の信号を変換するHCの2つの閾値レベルは、分割された2つの信号をそれぞれ変換する2つのHCのいずれかの出力信号によって切り替えられるように構成する。
例えば、第1と第2の回転信号がsin信号とcos信号からなる場合、いずれか一方を信号伝達経路で分割しない先の回路では、各HCで変換された出力レベルの組は4種類の組み合わせとなり、回転体の回転状態を直交座標の4つの象限で識別できる。これに対して、いずれか一方を信号伝達経路で分割する上記回路では、3つのHCでそれぞれ変換された出力レベルの組は8種類の組み合わせとなり、最大で回転体の回転状態を1周期の360°を45°で分割した8つの象限で識別できる。従って、上記回転信号処理回路は、先の回路に較べて、回転体の回転状態をより精密に把握することができる。
図7(a)は、図4と同様のsin信号とcos信号の振幅が変形した位相ズレのないR1信号とR2信号の電圧波形と、HC1〜HC3で設定される閾値レベル1H,1L,2H,2L,3H,3Lを示した図である。また、(b)は、HC1〜HC3から出力されるD1〜D3信号の電圧波形を示した図である。
図7に示すR1信号とR2信号について設定からの位相ズレがあっても、図5と図6で例示した回転信号処理回路K4と同様にして、正回転と逆回転で位相ズレを補正できることは言うまでもない。
次に、図5と図6に示した回転信号処理回路K4の応用例について説明する。
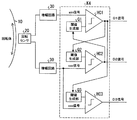
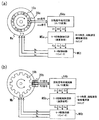
図8(a),(b)は、それぞれ、図5に示した回転信号処理回路K4の応用例で、3相駆動モータMa,Mbの駆動制御に用いられている回転信号処理回路K4a,K4bを示した図である。図8に示す回転信号処理回路K4a,K4bは、いずれも、図5に示した回転信号処理回路K4と同様の構成を有している。
図8(a)に示す3相駆動モータMaの駆動制御システムでは、磁石のN極とS極が回転外周円に交互に4組配置された回転体10aが、3相駆動モータMaの回転軸に取り付けられている。また、回転外周円の上方に隣接して、2つの磁気センサ素子で構成された回転センサ20aが配置されている。回転センサ20aは、回転体10aの回転に伴う磁界の変化を検出して、sin信号とcos信号を出力する。尚、回転センサ20aが出力する2つの回転信号は、sin信号とcos信号に限らず、振幅が変形した図7のようなR1信号とR2信号であってもよい。また、回転体10aでは、4組のN極とS極が回転外周円に配置されており、sin信号とcos信号の1周期(360°)は、回転体10aの1/4回転に相当する。
図8(a)の回転信号処理回路K4aに入力されたsin信号とcos信号は、図5に示したHC1〜HC3で回転体10aの角度位置情報を含んだデジタルのD1〜D3信号に変換され、モータ回転制御回路MSaに送られる。モータ回転制御回路MSaでは、D1〜D3信号を基にして、モータ駆動回路MKaのインバータを構成する電力スイッチング素子を駆動するゲート信号Gu,Gv,Gwが生成される。そして、モータ駆動回路MKaから3相の交流電流Iu,Iv,Iwが3相駆動モータMaに供給されて、回転体10aの回転状態が制御される。
図8(b)に示す3相駆動モータMbの駆動制御システムでは、回転外周円に歯車形状の凹凸が形成された回転体10bが、3相駆動モータMbの回転軸に取り付けられている。また、回転外周円の外側に隣接して、バイアス磁界を形成する円筒形状の磁石と2つの磁気センサ素子で構成された、回転センサ20bが配置されている。回転センサ20bは、回転体10bの回転に伴うバイアス磁界の変化を検出して、sin信号とcos信号を出力する。尚、回転センサ20bが出力する2つの回転信号も、sin信号とcos信号に限らず、振幅が変形した図7のようなR1信号とR2信号であってもよい。また、回転体10bでは、12組の凹凸が回転外周円に形成されており、sin信号とcos信号の1周期(360°)は、回転体10bの1/12回転に相当する。
図8(b)の回転信号処理回路K4b、モータ回転制御回路MSb、およびモータ駆動回路MKbでは、それぞれ、(a)の回転信号処理回路K4a、モータ回転制御回路MSa、およびモータ駆動回路MKaと同様の処理が行われ、3相駆動モータMbで回転体10bの回転状態が制御される。
図8で例示したように、本発明に係る回転信号処理回路は、回転体が、モータの回転子またはモータで駆動される回転体であり、HCが出力するデジタル信号が、モータの駆動制御に用いられる場合に特に好適である。このようにモータの駆動制御に用いられる回転信号処理回路では、回転体に対する回転センサの配置バラツキ等が原因で設定値からの位相ズレが生じている第1と第2の回転信号に対して、当該回転信号処理回路において位相ズレの補正が必要となるためである。
また、上記モータは、図8で例示したように、3相駆動モータであってもよい。この場合には、図5に例示した第1と第2の回転信号のいずれか一方を信号伝達経路で分割する回転信号処理回路を用いて、回転体の回転状態を1周期の360°を60°で分割した6つの象限で識別する構成が好適である。
上記回転体は、図8(a)で例示したように、回転軸の周りにN極とS極が等間隔で交互に配置された磁石を有する構成であってよい。また、図8(b)で例示したように、回転軸の周りに歯車形状の凹凸が形成された構成であってもよい。この場合、回転センサは、回転体の回転に伴った磁気的変化を検出して第1と第2の回転信号をそれぞれ出力する2つの磁気センサ素子で構成することができる。また、該磁気センサ素子は、例えば磁気抵抗素子とすることができる。
以上のように、上記回転信号処理回路は、位相差α(45°<α<135°)を持つ第1と第2の回転信号をHCにより回転体の角度位置情報を含んだデジタル信号に変換する、簡単で安価な回転信号処理回路とすることができる。さらには、回転体が正回転と逆回転の両方向に回転可能であり、入力される第1と第2の回転信号に設定からの位相ズレがあっても該位相ズレを補正可能で、回転体の角度検出誤差が生じない回転信号処理回路とすることができる。
従って、上記した回転信号処理回路は、例えば車載用のモータの駆動制御のように、正回転と逆回転の両方で第1と第2の回転信号の位相ズレの補正が必要で、低コストが要求される、車載用として好適である。例えば、回転体が可変バルブ機構のタイミングを制御するモータの回転子である場合には、上記回転信号処理回路を用いたモータの駆動制御が好適である。
K1〜K4,K4a,K4b 回転信号処理回路
HC1〜HC3 ヒステリシスコンパレータ(HC)
P1,P2,Q1〜Q3 閾値生成部
10,10a,10b 回転体
20,20a,20b 回転センサ
HC1〜HC3 ヒステリシスコンパレータ(HC)
P1,P2,Q1〜Q3 閾値生成部
10,10a,10b 回転体
20,20a,20b 回転センサ
Claims (11)
- 回転センサで検出される回転体の回転に伴った所定の周期で振幅が連続的に変化する第1の回転信号と、前記第1の回転信号と同じ周期で位相差α(45°<α<135°)を持って変化する第2の回転信号を入力し、
前記第1と第2の回転信号を、それぞれ、ヒステリシスコンパレータ(以下、HCと記載)を用いて、前記回転体の角度位置情報を含んだデジタル信号に変換して出力する回転信号処理回路であって、
前記第1の回転信号を変換するHCの2つの閾値レベルが、前記第2の回転信号を変換するHCの出力信号によって切り替えられ、
前記第2の回転信号を変換するHCの2つの閾値レベルが、前記第1の回転信号を変換するHCの出力信号によって切り替えられるように構成されてなることを特徴とする回転信号処理回路。 - 前記第1と第2の回転信号のいずれか一方の信号を信号伝達経路で2つの信号に分割して、それぞれを閾値レベルの異なる2つのHCに入力し、
前記分割された2つの信号を、それぞれ前記回転体の角度位置情報を含んだ異なるデジタル信号に変換して出力するように構成されてなり、
前記分割された2つの信号をそれぞれ変換する前記2つのHCの2つの閾値レベルが、いずれも、前記第1と第2の回転信号のもう一方の信号を変換するHCの出力信号によって切り替えられ、
前記もう一方の信号を変換するHCの2つの閾値レベルが、前記分割された2つの信号をそれぞれ変換する前記2つのHCのいずれかの出力信号によって切り替えられるように構成されてなることを特徴とする請求項1に記載の回転信号処理回路。 - 前記第1と第2の回転信号が、sin信号とcos信号からなることを特徴とする請求項1または2に記載の回転信号処理回路。
- 前記第1と第2の回転信号を変換するそれぞれHCが、当該HCの2つの閾値レベルを生成し、他のHCの出力信号で当該HCの2つの閾値レベルを切り替える閾値生成部として、
グランド(以下、GNDと記載)と正電源(以下、Vccと記載)との間で、GND側を第1段、Vcc側を第3段として、順次直列接続された3個の抵抗と、
電流端子が並列に接続されたNチャネルのMOSFET(以下、NMOSと記載)とPチャネルのMOSFET(以下、PMOSと記載)からなり、前記NMOSとPMOSのゲート端子にそれぞれ逆レベルの信号が入力されるトランスミッションゲート(以下、TGと記載)を2個有してなり、
第1のTGは、前記電流端子の一方が前記第1段と第2段の抵抗の接続点に接続され、
第2のTGは、前記電流端子の一方が前記第2段と第3段の抵抗の接続点に接続され、
前記第1のTGと第2のTGのもう一方の電流端子が、共通接続されて、当該HCの基準電圧入力端子に接続されてなり、
前記第1のTGと第2のTGから選択される2組の逆チャネルのMOSFETのゲート端子同士が、それぞれ共通接続されてなり、
当該HCの閾値レベルを切り替える前記別のHCの出力信号とその反転信号が、それぞれ、前記共通接続された2組の逆チャネルのMOSFETのゲート端子に印加されるように構成されてなることを特徴とする請求項1乃至3のいずれか一項に記載の回転信号処理回路。 - 前記回転体が、逆回転可能であることを特徴とする請求項1乃至4のいずれか一項に記載の回転信号処理回路。
- 前記回転体が、モータの回転子またはモータで駆動される回転体であり、
前記デジタル信号が、前記モータの駆動制御に用いられることを特徴とする請求項1乃至5のいずれか一項に記載の回転信号処理回路。 - 前記モータが、3相駆動モータであることを特徴とする請求項6に記載の回転信号処理回路。
- 前記回転体が、回転軸の周りにN極とS極が等間隔で交互に配置された磁石を有してなり、
前記回転センサが、前記回転体の回転に伴った磁気的変化を検出して、前記第1と第2の回転信号をそれぞれ出力する2つの磁気センサ素子で構成されてなることを特徴とする請求項1乃至7のいずれか一項に記載の回転信号処理回路。 - 前記磁気センサ素子が、磁気抵抗素子であることを特徴とする請求項8に記載の回転信号処理回路。
- 前記回転信号処理回路が、車載用であることを特徴とする請求項1乃至9のいずれか一項に記載の回転信号処理回路。
- 前記回転体が、可変バルブ機構のタイミングを制御するモータの回転子であることを特徴とする請求項10に記載の回転信号処理回路。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013255240A JP2015114159A (ja) | 2013-12-10 | 2013-12-10 | 回転信号処理回路 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013255240A JP2015114159A (ja) | 2013-12-10 | 2013-12-10 | 回転信号処理回路 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2015114159A true JP2015114159A (ja) | 2015-06-22 |
Family
ID=53528089
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013255240A Pending JP2015114159A (ja) | 2013-12-10 | 2013-12-10 | 回転信号処理回路 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2015114159A (ja) |
-
2013
- 2013-12-10 JP JP2013255240A patent/JP2015114159A/ja active Pending
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10530383B2 (en) | Semiconductor device | |
| TWI650528B (zh) | 旋轉角度檢測裝置及旋轉角度檢測方法 | |
| US9903740B2 (en) | Rotation-angle detecting device, image processing apparatus, and rotation-angle detecting method | |
| EP3239787B1 (en) | Drive circuit for two-coil step motor | |
| JP4732106B2 (ja) | モータ制御装置及びモータ制御方法 | |
| JP2015049047A (ja) | モータ制御装置 | |
| JP6844617B2 (ja) | モータモジュール、モータステップ動作制御システム、およびモータ制御装置 | |
| US9742323B2 (en) | Phase control circuit for brushless motor, brushless motor and method for controlling the phase of brushless motor | |
| US9602030B2 (en) | Motor drive circuit and motor thereof | |
| JP2018144512A (ja) | 操舵制御装置 | |
| JP2015208121A (ja) | 信号増幅装置及びそれを備えた位相検出装置、並びにモータ駆動制御装置 | |
| JP2007104769A (ja) | Pwm信号生成装置及びpwm信号生成方法並びにモータ制御装置及びモータ制御方法 | |
| JP6406114B2 (ja) | ブラシレスモータ | |
| KR20200082358A (ko) | Bldc 모터 제어시스템 및 그 제어방법 | |
| JP2015114159A (ja) | 回転信号処理回路 | |
| JP6361428B2 (ja) | 電圧レベル検出装置及び方法、モータ駆動制御装置、及びモータ装置 | |
| US12055419B2 (en) | Electronic rotary encoder | |
| JP4904996B2 (ja) | ブラシレスモータ | |
| JP5125218B2 (ja) | モータ制御装置 | |
| JP2015231242A (ja) | Dcモータおよびdcモータの制御方法 | |
| JP6340899B2 (ja) | 位相検出装置、モータ駆動制御装置およびモータ装置 | |
| JP4600748B2 (ja) | サーボモータの制御方法 | |
| JP2017223562A (ja) | 回転検出装置、モータ装置及び回転検出方法 | |
| JPH03277155A (ja) | 偏平型ブラシレスモータ | |
| JP2000350488A (ja) | 三相ブラシレスモータを駆動するためのpwm出力装置 |