JP2015084534A - Two-terminal pair surface acoustic wave resonator, surface acoustic wave oscillator, and electronic apparatus - Google Patents
Two-terminal pair surface acoustic wave resonator, surface acoustic wave oscillator, and electronic apparatus Download PDFInfo
- Publication number
- JP2015084534A JP2015084534A JP2014238236A JP2014238236A JP2015084534A JP 2015084534 A JP2015084534 A JP 2015084534A JP 2014238236 A JP2014238236 A JP 2014238236A JP 2014238236 A JP2014238236 A JP 2014238236A JP 2015084534 A JP2015084534 A JP 2015084534A
- Authority
- JP
- Japan
- Prior art keywords
- acoustic wave
- surface acoustic
- terminal
- relationship
- wave resonator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images





































Landscapes
- Surface Acoustic Wave Elements And Circuit Networks Thereof (AREA)
Abstract
Description
本発明は、二端子対弾性表面波共振子、並びにこれを搭載した弾性表面波発振器および電子機器に係り、特に基板表面に溝を設けたタイプの二端子対弾性表面波共振子、並びにこれを搭載した弾性表面波発振器および電子機器に関する。 The present invention relates to a two-terminal surface acoustic wave resonator, a surface acoustic wave oscillator and an electronic device on which the two-terminal surface acoustic wave resonator is mounted, and more particularly, to a two-terminal pair surface acoustic wave resonator having a groove on a substrate surface, and The present invention relates to a mounted surface acoustic wave oscillator and an electronic device.
弾性表面波(SAW:surface acoustic wave)装置(例えばSAW共振子)において
、周波数温度特性の変化には、SAWのストップバンドや水晶基板のカット角、およびIDT(interdigital transducer)の形成形態等が及ぼす影響が大きい。
In a surface acoustic wave (SAW) device (for example, a SAW resonator), changes in frequency temperature characteristics are affected by the stop band of the SAW, the cut angle of the quartz substrate, the form of IDT (interdigital transducer) formation, and the like. A large impact.
例えば特許文献1には、SAWのストップバンドの上端モード、下端モードのそれぞれを励起させる構成、およびストップバンドの上端モード、下端モードにおけるそれぞれの定在波の分布などが開示されている。
For example,
また、特許文献2〜5には、SAWにおけるストップバンドの上端モードの方が、ストップバンドの下端モードよりも周波数温度特性が良好である点が記載されている。そして、特許文献2、3には、レイリー波を利用したSAW装置において良好な周波数温度特性を得るために、水晶基板のカット角を調整すると共に、電極の基準化膜厚(H/λ)を0.1程度まで厚くする事が記載されている。
また、特許文献4には、レイリー波を利用したSAW装置において水晶基板のカット角を調整すると共に、電極の基準化膜厚(H/λ)を0.045程度以上厚くする旨が記載されている。
また、特許文献5には、回転YカットX伝搬の水晶基板を用い、ストップバンドの上端の共振を利用することで、ストップバンドの下端の共振を用いる場合よりも周波数温度特性が向上する旨が記載されている。
In addition,
また、特許文献6、および非特許文献1には、STカット水晶基板を用いたSAW装置において、IDTを構成する電極指間や反射器を構成する導体ストリップ間に溝(グルーブ)を設けることが記載されている。また非特許文献1には、溝の深さにより周波数温度特性が変化する旨が記載されている。
In
また、特許文献7には、LSTカットの水晶基板を用いたSAW装置において、周波数温度特性を示す曲線を三次元曲線とするための構成が記載されていると共に、レイリー波を用いたSAW装置においては、三次元曲線で示されるような温度特性を持つカット角の基板は発見することができなかった旨が記載されている。 Patent Document 7 describes a configuration for making a curve indicating frequency temperature characteristics into a three-dimensional curve in a SAW device using an LST cut quartz substrate, and in a SAW device using a Rayleigh wave. Describes that a substrate having a cut angle having a temperature characteristic as indicated by a three-dimensional curve could not be found.
上記のように、周波数温度特性を改善するための要素は多岐に亙り、特にレイリー波を用いたSAW装置では、IDTを構成する電極の膜厚を厚くすることが周波数温度特性に寄与する要因の1つであると考えられている。しかし本願出願人は、電極の膜厚を厚くすると、経時変化特性や耐温度衝撃特性等の耐環境特性が劣化することを実験的に見出した。また、周波数温度特性の改善を主目的とした場合には、前述したように電極膜厚を厚くしなければならず、これに伴って経時変化特性や耐温度衝撃特性等の劣化を余儀なくされていた。これはQ値に関しても当てはめられることであり、電極膜厚を厚くせずに高Q化を実現させることは困難であった。これらの問題点は二端子対弾性表面波共振子についても当てはまる。 As described above, there are a variety of factors for improving the frequency temperature characteristics. In particular, in a SAW device using Rayleigh waves, increasing the film thickness of the electrode constituting the IDT is a factor contributing to the frequency temperature characteristics. It is considered one. However, the applicant of the present application has experimentally found that environmental resistance characteristics such as aging characteristics and temperature shock resistance characteristics deteriorate when the electrode thickness is increased. In addition, when the main purpose is to improve the frequency temperature characteristics, the electrode film thickness must be increased as described above, and this has inevitably deteriorates the aging characteristics and the temperature shock resistance characteristics. It was. This is also true for the Q value, and it has been difficult to achieve high Q without increasing the electrode film thickness. These problems also apply to the two-terminal surface acoustic wave resonator.
したがって本願発明において二端子対弾性表面波共振子、弾性表面波発振器および電子機器を提供する際の課題は第1に、良好な周波数温度特性の実現、第2に耐環境特性の向上、第3に高いQ値を得る、というものである。 Accordingly, the problems in providing a two-terminal-pair surface acoustic wave resonator, a surface acoustic wave oscillator, and an electronic device according to the present invention are, first, realization of good frequency temperature characteristics, second, improvement of environmental resistance characteristics, A high Q value is obtained.
本発明は上記課題の少なくとも一部を解決するためになされたものであり、以下の形態または適用例として実現することが可能である。
[適用例1]オイラー角(−1.5°≦φ≦1.5°,117°≦θ≦142°,41.9°≦|ψ|≦49.5749°)の水晶基板上に設けられ、ストップバンド上端モードの弾性表面波を励振するIDTと、前記IDTを構成する電極指間に位置する基板を窪ませた電極指間溝を有する二端子対弾性表面波共振子であって、前記弾性表面波の波長をλ、前記電極指間溝の深さをGとした場合に、
![]()

このような特徴を持つ二端子対弾性表面波共振子によれば、周波数温度特性の向上を図ることができる。
SUMMARY An advantage of some aspects of the invention is to solve at least a part of the problems described above, and the invention can be implemented as the following forms or application examples.
Application Example 1 Provided on a quartz substrate with Euler angles (−1.5 ° ≦ φ ≦ 1.5 °, 117 ° ≦ θ ≦ 142 °, 41.9 ° ≦ | ψ | ≦ 49.5749 °). A two-terminal-pair surface acoustic wave resonator having an IDT that excites a surface acoustic wave of a stop band upper end mode and an inter-electrode finger groove in which a substrate located between electrode fingers constituting the IDT is recessed, When the wavelength of the surface acoustic wave is λ and the depth of the inter-electrode finger groove is G,
![]()
According to the two-terminal-pair surface acoustic wave resonator having such characteristics, it is possible to improve frequency temperature characteristics.
[適用例2]適用例1に記載の二端子対弾性表面波共振子であって、前記電極指間溝の深さGが、
![]()
![]()
このような特徴を持つ二端子対弾性表面波共振子によれば、電極指間溝の深さGが製造
時の誤差によりずれた場合であっても、個体間における共振周波数のシフトを補正範囲内に抑えることができる。
According to the two-terminal-pair surface acoustic wave resonator having such a feature, even if the depth G of the inter-electrode finger groove is shifted due to an error during manufacturing, the resonance frequency shift between individuals is corrected. Can be suppressed within.
[適用例3]適用例1または適用例2に記載の二端子対弾性表面波共振子であって、前記IDTの電極膜厚をHとした場合に、
![]()
![]()
このような特徴を有する二端子対弾性表面波共振子によれば、動作温度範囲内において良好な周波数温度特性を示すことを実現することができる。また、このような特徴を有することによれば、電極膜厚の増加に伴う耐環境特性の劣化を抑制することが可能となる。 According to the two-terminal-pair surface acoustic wave resonator having such a feature, it is possible to realize a good frequency-temperature characteristic within the operating temperature range. Moreover, according to having such a characteristic, it becomes possible to suppress degradation of the environmental resistance characteristics accompanying the increase in the electrode film thickness.
[適用例4]適用例3に記載の二端子対弾性表面波共振子であって、前記ライン占有率ηが、
適用例3における電極膜厚の範囲内において数式(8)を満たすようにηを定めることで、二次温度係数を略、±0.01ppm/℃2以内に収めることが可能となる。
Application Example 4 The two-terminal-pair surface acoustic wave resonator according to Application Example 3, wherein the line occupancy η is
By defining η so as to satisfy Formula (8) within the range of the electrode film thickness in Application Example 3, it becomes possible to keep the secondary temperature coefficient within approximately ± 0.01 ppm / ° C. 2 .
[適用例5]適用例3または適用例4に記載の弾性表面波共振子であって、前記電極指間溝の深さGと前記電極膜厚Hとの和が、
![]()
電極指間溝の深さGと電極膜厚Hとの和を上記のように定めることで、従来の弾性表面波共振子よりも高いQ値を得ることができる。
[Application Example 5] The surface acoustic wave resonator according to Application Example 3 or Application Example 4, wherein the sum of the inter-electrode finger groove depth G and the electrode film thickness H is:
![]()
By determining the sum of the inter-electrode finger depth G and the electrode film thickness H as described above, a higher Q value than that of a conventional surface acoustic wave resonator can be obtained.
[適用例6]適用例1乃至適用例5のいずれか1例に記載の二端子対弾性表面波共振子であって、前記ψと前記θが、
![]()
![]()
このような特徴を有するカット角で切り出された水晶基板を用いて二端子対弾性表面波共振子を製造することで、広い範囲で良好な周波数温度特性を示す二端子対弾性表面波共振子とすることができる。 By producing a two-terminal-pair surface acoustic wave resonator using a quartz substrate cut at a cut angle having such characteristics, a two-terminal-pair surface acoustic wave resonator exhibiting a good frequency-temperature characteristic in a wide range; can do.
[適用例7]適用例1乃至適用例6のいずれか1例に記載の二端子対弾性表面波共振子であって、前記IDTにおけるストップバンド上端モードの周波数をft2、前記IDTを弾性表面波の伝搬方向に挟み込むように配置される反射器におけるストップバンド下端モードの周波数をfr1、前記反射器のストップバンド上端モードの周波数をfr2としたとき、
![]()
![]()
このような特徴を有することにより、IDTのストップバンド上端モードの周波数ft2において、反射器の反射係数|Γ|が大きくなり、IDTから励振されたストップバンド上端モードの弾性表面波が、反射器にて高い反射係数でIDT側に反射されるようになる。そしてストップバンド上端モードの弾性表面波のエネルギー閉じ込めが強くなり、低損失な二端子対弾性表面波共振子を実現することができる。 By having such a feature, the reflection coefficient | Γ | of the reflector increases at the frequency ft2 of the IDT stopband upper end mode, and the stopband upper end mode surface acoustic wave excited from the IDT is generated in the reflector. Therefore, it is reflected to the IDT side with a high reflection coefficient. Further, the energy confinement of the surface acoustic wave in the stop band upper end mode becomes stronger, and a low-loss two-terminal-pair surface acoustic wave resonator can be realized.
[適用例8]適用例1乃至適用例7のいずれか1例に記載の二端子対弾性表面波共振子であって、前記反射器を構成する導体ストリップ間に導体ストリップ間溝を設け、前記電極指間溝よりも前記導体ストリップ間溝の深さの方が浅いことを特徴とする二端子対弾性表面波共振子。 [Application Example 8] The two-terminal-pair surface acoustic wave resonator according to any one of Application Examples 1 to 7, wherein a groove between conductor strips is provided between conductor strips constituting the reflector, A two-terminal-pair surface acoustic wave resonator characterized in that the groove between the conductor strips is shallower than the groove between the electrode fingers.
このような特徴を有することで、反射器のストップバンドをIDTのストップバンドよりも高域側へ周波数シフトさせることができる。このため、数式(18)の関係を実現させることが可能となる。 By having such a feature, the stop band of the reflector can be frequency-shifted to a higher frequency side than the stop band of the IDT. For this reason, it becomes possible to implement | achieve the relationship of Numerical formula (18).
[適用例9]適用例1乃至適用例8のいずれか1例に記載の二端子対弾性表面波共振子を備えたことを特徴とする弾性表面波発振器。 Application Example 9 A surface acoustic wave oscillator comprising the two-terminal-pair surface acoustic wave resonator according to any one of Application Examples 1 to 8.
[適用例10]適用例1乃至適用例8のいずれか1例に記載のトランスバーサル型弾性表面波デバイスを備えたことを特徴とする電子機器。 Application Example 10 An electronic apparatus comprising the transversal surface acoustic wave device according to any one of Application Examples 1 to 8.
以下、本発明の実施の形態について図面を参照しつつ詳細に説明する。
まず、図1を参照して、一端子対の弾性表面波(SAW)共振子に係る実施形態について説明する。なお図1において、図1(A)はSAW共振子の平面図であり、図1(B)は部分拡大断面図、図1(C)は同図(B)における詳細を説明するための拡大図である。
Hereinafter, embodiments of the present invention will be described in detail with reference to the drawings.
First, an embodiment according to a one-terminal-pair surface acoustic wave (SAW) resonator will be described with reference to FIG. 1A is a plan view of a SAW resonator, FIG. 1B is a partially enlarged sectional view, and FIG. 1C is an enlarged view for explaining details in FIG. 1B. FIG.
本実施形態に係るSAW共振子10は、水晶基板30と、IDT12、および反射器20を基本として構成される。水晶基板30は、結晶軸をX軸(電気軸)、Y軸(機械軸)、およびZ軸(光軸)で示すものを用いる。
The
本実施形態では水晶基板30として、オイラー角(−1°≦φ≦1°,117°≦θ≦142°,41.9°≦|ψ|≦49.57°)で表される面内回転STカット水晶基板を採用した。ここで、オイラー角について説明する。オイラー角(0°,0°,0°)で表される基板は、Z軸に垂直な主面を有するZカット基板となる。ここで、オイラー角(φ,θ,ψ)のφはZカット基板の第1の回転に関するものであり、Z軸を回転軸とし、+X軸から+Y軸側へ回転する方向を正の回転角度とした第1回転角度である。オイラー角のθはZカット基板の第1の回転後に行う第2の回転に関するものであり、第1の回転後のX軸を回転軸とし、第1の回転後の+Y軸から+Z軸へ回転する方向を正の回転角度とした第2の回転角度である。圧電基板のカット面は、第1回転角度φと第2回転角度θとで決定される。オイラー角のψはZカット基板の第2の回転後に行う第3の回転に関するものであり、第2の回転後のZ軸を回転軸とし、第2の回転後の+X軸から第2の回転
後の+Y軸側へ回転する方向を正の回転角度とした第3回転角度である。SAWの伝搬方
向は、第2の回転後のX軸に対する第3回転角度ψで表される。
In this embodiment, the
IDT12は、複数の電極指18の基端部をバスバー16で接続した櫛歯状電極14a,14bを一対有し、一方の櫛歯状電極14a(または14b)を構成する電極指18と他方の櫛歯状電極14b(または14a)を構成する電極指18とを所定の間隔をあけて交互に配置している。ここで、電極指18は、弾性表面波の伝播方向であるX′軸と直交する方向に配置される。このようにして構成されるSAW共振子10によって励起されるSAWは、Rayleigh型(レイリー型)のSAWであり、第3の回転後のZ軸と第3の回転後のX軸の両方に振動変位成分を有する。そしてこのように、SAWの伝播方向を水晶の結晶軸であるX軸からずらすことで、ストップバンド上端モードのSAWを励起することが可能となるのである。
The
ここで、ストップバンド上端モードのSAWと下端モードのSAWの関係について説明する。図2に示すような正規型IDT12(図2に示すのはIDT12を構成する電極指18)によって形成されるストップバンド下端モード、および上端モードのSAWにおいて、それぞれの定在波は、腹(又は節)の位置が互いにπ/2ずれている。図2は、正規型IDT12におけるストップバンド上端モードおよび下端モードの定在波の分布を示す図である。
Here, the relationship between the stop band upper end mode SAW and the lower end mode SAW will be described. In the stop band lower end mode and the upper end mode SAW formed by the
図2によれば上述したように、実線で示すストップバンド下端モードの定在波は、電極指18の中央位置、すなわち反射中心位置に腹が存在し、一点鎖線で示したストップバンド上端モードの定在波は反射中心位置に節が存在する。
According to FIG. 2, as described above, the standing wave in the stop band lower end mode indicated by the solid line has an antinode at the center position of the
また、反射器20は、前記IDT12をSAWの伝播方向に挟み込むように一対設けられる。具体的構成としては、IDT12を構成する電極指18と平行に設けられる複数の導体ストリップ22の両端をそれぞれ接続したものである。
A pair of
なお、水晶基板のSAW伝搬方向の端面からの反射波を積極的に利用する端面反射型SAW共振子や、IDTの電極指対数を多くすることでIDT自体でSAWの定在波を励起する多対IDT型SAW共振子においては、反射器は必ずしも必要ではない。 It should be noted that end face reflection type SAW resonators that actively use the reflected wave from the end face of the quartz substrate in the SAW propagation direction, and that the IDT itself excites SAW standing waves by increasing the number of electrode finger pairs of the IDT. In the anti-IDT type SAW resonator, the reflector is not always necessary.
このようにして構成されるIDT12や反射器20を構成する電極膜の材料としては、アルミニウム(Al)やAlを主体とした合金を用いることができる。なお、電極膜材料として合金を用いる場合、主成分となるAl以外の金属は重量比で10%以下にすればよい。
As the material of the electrode film constituting the
上記のような基本構成を有するSAW共振子10における水晶基板30は、IDT12の電極指間や反射器20の導体ストリップ間に溝(電極指間溝)32を設けている。
The
水晶基板30に設ける溝32は、ストップバンド上端モードにおけるSAWの波長をλとし、溝深さをGとした場合、
![]()
![]()
![]()
![]()
![]()
![]()
また、ライン占有率ηとは図1(C)に示すように、電極指18の線幅(水晶凸部のみの場合には凸部の幅をいう)Lを電極指18間のピッチλ/2(=L+S)で除した値である。したがって、ライン占有率ηは、数式(4)で示すことができる。
ここで本実施形態に係るSAW共振子10は、ライン占有率ηを数式(5)のような範囲で定めると良い。なお、数式(5)からも解るようにηは溝32の深さGを定めることにより導き出すことができる。
また、本実施形態に係るSAW共振子10における電極膜材料(IDT12や反射器20等)の膜厚は、
![]()
![]()
さらに、ライン占有率ηについて数式(6)で示した電極膜の厚みを考慮した場合、ηは数式(7)により求めることができる。
ライン占有率ηは、電極膜厚が厚いほど電気的特性(特に共振周波数)の製造ばらつきが大きくなり、電極膜厚Hが数式(6)の範囲内においては±0.04以内の製造ばらつき、H>0.035λにおいては±0.04より大きい製造ばらつきが生じる可能性が大きい。しかしながら、電極膜厚Hが数式(6)の範囲内であり、且つライン占有率ηのばらつきが±0.04以内であれば、二次温度係数βの小さいSAWデバイスが実現できる。即ちライン占有率ηは、数式(7)に±0.04の公差を加えた数式(8)の範囲まで許容できる。
上記のような構成の本実施形態に係るSAW共振子10では、二次温度係数βを±0.01ppm/℃2以内とし、望ましくはSAWの動作温度範囲を−40℃〜+85℃とした場合に、当該動作温度範囲内における周波数変動量ΔFを25ppm以下とすることができる程度まで、周波数温度特性を向上させることを目的としている。なお、二次温度係数βは、SAWの周波数温度特性を示す曲線の多項式近似における二次係数であるため、二次温度係数の絶対値が小さい事は周波数変動量が小さい事を意味し、周波数温度特性が良好であるということができる。以下は、上記のような構成のSAWデバイスが、本発明の目的を達成することのできる要素を備えていることについてのシミュレーションを用いた証明である。
In the
なお、STカットと呼ばれる水晶基板を用いて伝搬方向を結晶X軸方向としたSAW共振子は、動作温度範囲を同一とした場合、動作温度範囲内における周波数変動量ΔFは約117ppmとなり、二次温度係数βは、−0.030ppm/℃2程度となる。また、水晶基板のカット角とSAW伝搬方向をオイラー角表示で(0,123°,45°)とし、動作温度範囲を同一とした面内回転STカット水晶基板を用いたSAW共振子の場合、周波数変動量ΔFは約63ppm、二次温度係数βは−0.016ppm/℃2程度となる。 Note that a SAW resonator using a quartz substrate called ST cut and having the propagation direction as the crystal X-axis direction has a frequency fluctuation amount ΔF within the operating temperature range of about 117 ppm when the operating temperature range is the same. The temperature coefficient β is about −0.030 ppm / ° C. 2 . Also, in the case of a SAW resonator using an in-plane rotating ST-cut quartz substrate in which the cut angle and SAW propagation direction of the quartz substrate are set to Euler angles (0, 123 °, 45 °) and the operating temperature range is the same, The frequency fluctuation amount ΔF is about 63 ppm, and the secondary temperature coefficient β is about −0.016 ppm / ° C. 2 .
SAW共振子10の周波数温度特性の変化には上述したように、IDT12における電極指18のライン占有率ηや電極膜厚H、及び溝深さGなどが関係している。そして本実施形態に係るSAW共振子10は、ストップバンド上端モードの励振を利用する。
As described above, the change in the frequency temperature characteristic of the
図4は、ライン占有率ηを変化させて水晶基板30にSAWを伝播させた場合における二次温度係数βの変化を示すグラフである。図4において図4(A)は溝深さGを0.02λとした場合のストップバンド上端モードの共振における二次温度係数βを示し、図4(B)は溝深さGを0.02λとした場合のストップバンド下端モードの共振における二
次温度係数βを示す。また、図4において図4(C)は溝深さGを0.04λとした場合のストップバンド上端モードの共振における二次温度係数βを示し、図4(D)は溝深さGを0.04λとした場合のストップバンド下端モードの共振における二次温度係数βを示す。なお、図4に示すシミュレーションは、周波数温度特性を変動させる因子を減らすために、電極膜を設けない水晶基板30に何らかの形でSAWを伝搬させた場合の例を示すものである。また、水晶基板30のカット角は、オイラー角(0°,123°,ψ)のものを使用した。なお、ψに関しては、二次温度係数βの絶対値が最少となる値を適宜選択している。
FIG. 4 is a graph showing changes in the secondary temperature coefficient β when SAW is propagated through the
図4からは、ストップバンド上端モードの場合も下端モードの場合も、ライン占有率ηが0.6〜0.7となるあたりで二次温度係数βが大きく変化していることを読み取ることができる。そして、ストップバンド上端モードにおける二次温度係数βの変化とストップバンド下端モードにおける二次温度係数βの変化とを比較すると、次のような事を読み取ることができる。すなわち、ストップバンド下端モードにおける二次温度係数βの変化は、マイナス側からさらにマイナス側へ変化する事により特性が低下している(二次温度係数βの絶対値が大きくなっている)。これに対し、ストップバンド上端モードにおける二次温度係数βの変化は、マイナス側からプラス側へ変化することにより特性が向上している(二次温度係数βの絶対値が小さくなっている)ということである。 From FIG. 4, it can be read that the secondary temperature coefficient β greatly changes when the line occupancy η is 0.6 to 0.7 in both the stop band upper end mode and the lower end mode. it can. When the change in the secondary temperature coefficient β in the stop band upper end mode is compared with the change in the secondary temperature coefficient β in the stop band lower end mode, the following can be read. That is, the characteristic of the change in the secondary temperature coefficient β in the stop band lower end mode is deteriorated by changing from the minus side to the minus side (the absolute value of the secondary temperature coefficient β is increased). On the other hand, the change in the secondary temperature coefficient β in the stop band upper end mode is improved by changing from the minus side to the plus side (the absolute value of the secondary temperature coefficient β is reduced). That is.
このことより、SAWデバイスにおいて良好な周波数温度特性を得るためには、ストップバンド上端モードの振動を用いることが望ましいということができる。 From this, it can be said that it is desirable to use the vibration in the stop band upper end mode in order to obtain good frequency temperature characteristics in the SAW device.
次に発明者は、溝深さGを種々変化させた水晶基板においてストップバンド上端モードのSAWを伝搬させた際におけるライン占有率ηと二次温度係数βとの関係について調べた。 Next, the inventor examined the relationship between the line occupancy η and the secondary temperature coefficient β when the stop band upper end mode SAW was propagated in the quartz substrate with various groove depths G.
図5は、溝深さGを0.01λ(1%λ)から0.08λ(8%λ)まで変化させた際のライン占有率ηと二次温度係数βとの関係を示すシミュレーションのグラフである。図5からは、溝深さGを0.0125λ(1.25%λ)としたあたりからβ=0となる点、すなわち周波数温度特性を示す近似曲線が三次曲線を示す点が現れ始めていることが読み取れる。そして、図5からは、β=0となるηがそれぞれ2箇所(ηが大きな方におけるβ=0となる点(η1)や、ηが小さい方におけるβ=0となる点(η2))がある。なお図5からは、η2の方が、η1よりも溝深さGの変化に対するライン占有率ηの変動量が大きいという事も読み取ることができる。 FIG. 5 is a simulation graph showing the relationship between the line occupancy η and the secondary temperature coefficient β when the groove depth G is changed from 0.01λ (1% λ) to 0.08λ (8% λ). It is. From FIG. 5, the point where β = 0 is reached when the groove depth G is 0.0125λ (1.25% λ), that is, the point where the approximate curve indicating the frequency-temperature characteristic shows a cubic curve starts to appear. Can be read. From FIG. 5, there are two η at which β = 0 (point (η1) where β = 0 when η is larger, and point (η2) where β = 0 when η is smaller)). is there. From FIG. 5, it can be read that η2 has a larger fluctuation amount of the line occupation ratio η with respect to the change of the groove depth G than η1.
この点については、図6を参照することによりその理解を深めることができる。図6は、溝深さGを変えていった場合において二次温度係数βが0となるη1、η2をそれぞれプロットしたグラフである。図6は、溝深さGが大きくなるにつれて、η1、η2は互いに小さくなるが、η2の方は、溝深さG=0.04λとなったあたりで0.5λ〜0.9λの範囲で示したグラフをスケールアウトしてしまうほど変動量が大きいということを読み取ることができる。つまり、η2は、溝深さGの変化に対する変動量が大きいということがいえる。 About this point, the understanding can be deepened by referring to FIG. FIG. 6 is a graph plotting η1 and η2 at which the secondary temperature coefficient β becomes 0 when the groove depth G is changed. FIG. 6 shows that η1 and η2 become smaller as the groove depth G increases, but η2 is in the range of 0.5λ to 0.9λ when the groove depth G = 0.04λ. It can be read that the amount of variation increases as the graph shown is scaled out. That is, it can be said that η2 has a large fluctuation amount with respect to the change of the groove depth G.
図7は、図5における縦軸を二次温度係数βに替えて周波数変動量ΔFとして示したグラフである。図7からは当然に、β=0となる2つの点(η1、η2)において、周波数変動量ΔFが低下する事を読み取ることができる。さらに図7からは、β=0となる2つの点では、溝深さGを変えたいずれのグラフにおいても、η1にあたる点の方が、周波数変動量ΔFが小さく抑えられているということを読み取ることができる。 FIG. 7 is a graph in which the vertical axis in FIG. 5 is replaced with the secondary temperature coefficient β as a frequency variation ΔF. Naturally, it can be seen from FIG. 7 that the frequency variation ΔF decreases at two points (η1, η2) where β = 0. Further, from FIG. 7, it can be read that at two points where β = 0, the frequency fluctuation amount ΔF is suppressed smaller at the point corresponding to η1 in any graph in which the groove depth G is changed. be able to.
上記傾向によると、製造時に誤差が生じ易い量産品に関しては、溝深さGの変動に対す
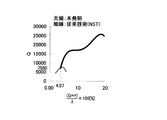
るβ=0となる点の変動量が少ない方、すなわちη1を採用することが望ましいと考えられる。図3には、各溝深さGにおいて二次温度係数βが最少となる点(η1)での周波数変動量ΔFと溝深さGとの関係のグラフを示す。図3によると、周波数変動量ΔFが目標値である25ppm以下となる溝深さGの下限値は、溝深さGが0.01λとなり、溝深さGの範囲はそれ以上、すなわち0.01≦Gということになる。
According to the above tendency, for mass-produced products that are prone to errors during manufacturing, it is considered desirable to adopt η1 that has a smaller fluctuation amount at the point where β = 0 with respect to fluctuations in the groove depth G. FIG. 3 shows a graph of the relationship between the frequency variation ΔF and the groove depth G at the point (η1) at which the secondary temperature coefficient β is minimum at each groove depth G. According to FIG. 3, the lower limit value of the groove depth G at which the frequency fluctuation amount ΔF is 25 ppm or less, which is the target value, is 0.01λ, and the range of the groove depth G is more than that, that is, 0. 01 ≦ G.
なお、図3にはシミュレーションによって、溝深さGが0.08以上となる場合の例も追加した。このシミュレーションによれば溝深さGは、0.01λ以上で周波数変動量ΔFが25ppm以下となり、その後、溝深さGが増す毎に周波数変動量ΔFが小さくなる。しかし、溝深さGが約0.09λ以上となった場合に、周波数変動量ΔFは再び増加し、0.094λを越えると周波数変動量ΔFが25ppmを超えることとなる。 In FIG. 3, an example in which the groove depth G is 0.08 or more is also added by simulation. According to this simulation, when the groove depth G is 0.01λ or more, the frequency variation ΔF is 25 ppm or less, and thereafter, as the groove depth G increases, the frequency variation ΔF decreases. However, when the groove depth G is about 0.09λ or more, the frequency variation ΔF increases again, and when it exceeds 0.094λ, the frequency variation ΔF exceeds 25 ppm.
図3に示すグラフは水晶基板30上に、IDT12や反射器20等の電極膜を形成していない状態でのシミュレーションであるが、詳細を以下に示す図16〜図21を参照すると解るように、SAW共振子10は電極膜を設けた方が周波数変動量ΔFを小さくすることができると考えられる。よって溝深さGの上限値を定めるとすれば電極膜を形成していない状態での最大値、すなわちG≦0.94λとすれば良く、目標を達成するために好適な溝深さGの範囲としては、
![]()
![]()
なお、量産工程において溝深さGは、最大±0.001λ程度のバラツキを持つ。よって、ライン占有率ηを一定とした場合において、溝深さGが±0.001λだけズレた場合におけるSAW共振子10の個々の周波数変動量Δfについて図8に示す。図8によれば、G=0.04λの場合において、溝深さGが±0.001λズレた場合、すなわち溝深さが0.039λ≦G≦0.041λの範囲においては、周波数変動量Δfが±500ppm程度であるということを読み取ることができる。
In the mass production process, the groove depth G has a maximum variation of about ± 0.001λ. Therefore, FIG. 8 shows individual frequency fluctuation amounts Δf of the
ここで、周波数変動量Δfが±1000ppm未満であれば、種々の周波数微調整手段により周波数調整が可能であると考える。しかし、周波数変動量Δfが±1000ppm以上となった場合には、周波数の調整によりQ値、CI(crystal impedance)値等の静
特性や、長期信頼性への影響が生じ、SAW共振子10として良品率の低下へと繋がる。
Here, if the frequency variation Δf is less than ± 1000 ppm, it is considered that the frequency can be adjusted by various frequency fine adjustment means. However, when the frequency fluctuation amount Δf becomes ± 1000 ppm or more, the frequency adjustment affects static characteristics such as Q value and CI (crystal impedance) value and long-term reliability. This leads to a decrease in the yield rate.
図8に示すプロットを繋ぐ直線について、周波数変動量Δf[ppm]と溝深さGとの関係を示す近似式を導くと、数式(10)を得ることができる。
![]()
![]()
ここで、Δf<1000ppmとなるGの値を求めると、G≦0.0695λとなる。したがって、本実施形態に係る溝深さGの範囲として好適には、
![]()
![]()
次に、図9に、二次温度係数β=0となるη、すなわち三次温特を示すライン占有率ηと溝深さGとの関係をグラフに示す。水晶基板30は、オイラー角を(0°,123°,
ψ)とした。ここでψについては、周波数温度特性が三次曲線の傾向を示す角度、すなわち二次温度係数β=0となる角度を適宜選択している。なお、図9と同様な条件において、β=0となるηを得た際のオイラー角ψと溝深さGとの関係を図24に示す。図24の電極膜厚H=0.02λのグラフにおいて、ψ<42°のプロットが表示されていないが、このグラフのη2のプロットはG=0.03λにてψ=41.9°となっている。各電極膜厚における溝深さGとライン占有率ηとの関係については、詳細を後述する図12〜図17に基づいてプロットを得ている。
Next, FIG. 9 is a graph showing the relationship between η at which the secondary temperature coefficient β = 0, that is, the line occupancy η indicating the tertiary temperature characteristic and the groove depth G. The
ψ). Here, for ψ, an angle at which the frequency temperature characteristic shows a tendency of a cubic curve, that is, an angle at which the secondary temperature coefficient β = 0 is appropriately selected. FIG. 24 shows the relationship between Euler angle ψ and groove depth G when η where β = 0 is obtained under the same conditions as in FIG. In the graph of the electrode film thickness H = 0.02λ in FIG. 24, the plot of ψ <42 ° is not displayed, but the plot of η2 in this graph is ψ = 41.9 ° at G = 0.03λ. ing. With respect to the relationship between the groove depth G and the line occupancy η for each electrode film thickness, plots are obtained based on FIGS.
図9からは、いずれの膜厚においても、上述したように、η1はη2に比べて溝深さGの変化による変動が少ないということを読み取ることができる。このため、図9におけるそれぞれの膜厚のグラフについて、η1を抜き出し、図10にまとめた。図10からは、破線で示すラインの中にη1が集中していることを読み取ることができる。また、図10によると、ライン占有率ηの上限を示すプロットは、電極膜厚H=0.01λとしたSAW共振子であり、ライン占有率ηの下限を示すプロットは、電極膜厚H=0.035λとしたSAW共振子である。つまり、電極膜厚Hを厚くするに従って二次温度係数β=0とすることのできるライン占有率ηが小さくなるということができる。 From FIG. 9, it can be read that at any film thickness, as described above, η1 has less fluctuation due to the change in the groove depth G than η2. For this reason, η1 was extracted for each film thickness graph in FIG. 9 and summarized in FIG. From FIG. 10, it can be read that η1 is concentrated in the line indicated by the broken line. Further, according to FIG. 10, the plot showing the upper limit of the line occupation ratio η is a SAW resonator having the electrode film thickness H = 0.01λ, and the plot showing the lower limit of the line occupation ratio η is the electrode film thickness H = The SAW resonator is 0.035λ. That is, it can be said that as the electrode film thickness H is increased, the line occupancy η at which the secondary temperature coefficient β = 0 can be reduced.
これらを踏まえ、ライン占有率ηの上限を示すプロットと下限を示すプロットのそれぞれについて近似式を求めると、数式(12)と、数式(13)を導くことができる。
数式(12)、数式(13)より、図10において破線で囲った範囲においてηは、数式(14)の範囲で定めることができるといえる。
ここで、二次温度係数βを±0.01ppm/℃2以内まで許容する場合、数式(11)と数式(14)を共に満たすことで、二次温度係数βが±0.01ppm/℃2以内になることを確認した。 Here, when the secondary temperature coefficient β is allowed to be within ± 0.01 ppm / ° C. 2 , the secondary temperature coefficient β is ± 0.01 ppm / ° C. 2 by satisfying both the formula (11) and the formula (14). Confirmed that it would be within.
また、数式(12)〜(14)を踏まえて電極膜厚H≒0、0.01λ、0.02λ、0.03λ、0.035λとしたSAW共振子10についてそれぞれ、β=0となる溝深さGとライン占有率ηとの関係を近似直線で示すと図11のようになる。なお、電極膜を設けない水晶基板30における溝深さGとライン占有率ηとの関係については、図6に示した通りである。
Further, in the
これら電極膜厚Hを踏まえた近似直線を示す近似式に基づいて周波数温度特性が良好となる溝深さGとライン占有率ηの関係式は、数式(15)のようになる。
ライン占有率ηは、電極膜厚が厚いほど電気的特性(特に共振周波数)の製造ばらつきが大きくなり、電極膜厚Hが数式(6)の範囲内においては±0.04以内の製造ばらつき、H>0.035λにおいては±0.04より大きい製造ばらつきが生じる可能性が大きい。しかしながら、電極膜厚Hが数式(6)の範囲内であり、且つライン占有率ηのばらつきが±0.04以内であれば、二次温度係数βの小さいSAWデバイスが実現できる。即ち、ライン占有率の製造ばらつきを考慮した上で二次温度係数βを±0.01ppm/℃2以内とする場合、ライン占有率ηは、数式(15)に±0,04の公差を加えた数式(16)の範囲まで許容できる。
図12〜図17に、電極膜厚をそれぞれ0.01λ(1%λ)、0.015λ(1.5%λ)、0.02λ(2%λ)、0.025λ(2.5%λ)、0.03λ(3%λ)、0.035λ(3.5%λ)とした場合において、溝深さGを変化させた場合におけるライン占有率ηと二次温度係数βとの関係のグラフを示す。 12 to 17, the electrode film thicknesses are 0.01λ (1% λ), 0.015λ (1.5% λ), 0.02λ (2% λ), and 0.025λ (2.5% λ, respectively). ), 0.03λ (3% λ), 0.035λ (3.5% λ), and the relationship between the line occupancy η and the secondary temperature coefficient β when the groove depth G is changed. A graph is shown.
また、図18〜図23には、図12〜図17に対応したSAW共振子10におけるライン占有率ηと周波数変動量ΔFとの関係のグラフを示す。なお、水晶基板はいずれもオイラー角(0°,123°,ψ)のものを使用し、ψについては適宜ΔFが最小となる角度を選択する。
18 to 23 are graphs showing the relationship between the line occupancy η and the frequency variation ΔF in the
ここで、図12は、電極膜厚Hを0.01λとした場合のライン占有率ηと二次温度係数βとの関係を示す図であり、図18は電極膜厚Hを0.01λとした場合のライン占有率ηと周波数変動量ΔFとの関係を示す図である。 Here, FIG. 12 is a diagram showing the relationship between the line occupancy η and the secondary temperature coefficient β when the electrode film thickness H is 0.01λ, and FIG. 18 shows the electrode film thickness H is 0.01λ. It is a figure which shows the relationship between the line occupation rate (eta) in the case of having performed, and frequency variation amount (DELTA) F.
また、図13は、電極膜厚Hを0.015λとした場合のライン占有率ηと二次温度係数βとの関係を示す図であり、図19は電極膜厚Hを0.015λとした場合のライン占有率ηと周波数変動量ΔFとの関係を示す図である。 FIG. 13 is a diagram showing the relationship between the line occupancy η and the secondary temperature coefficient β when the electrode film thickness H is 0.015λ, and FIG. 19 shows the electrode film thickness H is 0.015λ. It is a figure which shows the relationship between the line occupation rate (eta) in case, and frequency variation amount (DELTA) F.
また、図14は、電極膜厚Hを0.02λとした場合のライン占有率ηと二次温度係数βとの関係を示す図であり、図20は電極膜厚Hを0.02λとした場合のライン占有率ηと周波数変動量ΔFとの関係を示す図である。 FIG. 14 is a diagram showing the relationship between the line occupancy η and the secondary temperature coefficient β when the electrode film thickness H is 0.02λ, and FIG. 20 shows the electrode film thickness H is 0.02λ. It is a figure which shows the relationship between the line occupation rate (eta) in case, and frequency variation amount (DELTA) F.
また、図15は、電極膜厚Hを0.025λとした場合のライン占有率ηと二次温度係数βとの関係を示す図であり、図21は電極膜厚Hを0.025λとした場合のライン占有率ηと周波数変動量ΔFとの関係を示す図である。 FIG. 15 is a diagram showing the relationship between the line occupancy η and the secondary temperature coefficient β when the electrode film thickness H is 0.025λ, and FIG. 21 shows the electrode film thickness H is 0.025λ. It is a figure which shows the relationship between the line occupation rate (eta) in case, and frequency variation amount (DELTA) F.
また、図16は、電極膜厚Hを0.03λとした場合のライン占有率ηと二次温度係数βとの関係を示す図であり、図22は電極膜厚Hを0.03λとした場合のライン占有率ηと周波数変動量ΔFとの関係を示す図である。 FIG. 16 is a diagram showing the relationship between the line occupancy η and the secondary temperature coefficient β when the electrode film thickness H is 0.03λ, and FIG. 22 shows the electrode film thickness H is 0.03λ. It is a figure which shows the relationship between the line occupation rate (eta) in case, and frequency variation amount (DELTA) F.
また、図17は、電極膜厚Hを0.035λとした場合のライン占有率ηと二次温度係数βとの関係を示す図であり、図23は電極膜厚Hを0.035λとした場合のライン占
有率ηと周波数変動量ΔFとの関係を示す図である。
FIG. 17 is a diagram showing the relationship between the line occupancy η and the secondary temperature coefficient β when the electrode film thickness H is 0.035λ, and FIG. 23 shows the electrode film thickness H is 0.035λ. It is a figure which shows the relationship between the line occupation rate (eta) in case, and frequency variation amount (DELTA) F.
これらの図(図12〜図23)においては、いずれのグラフにおいても微差はあるものの、その変化の傾向に関しては、水晶基板30のみにおけるライン占有率ηと二次温度係数β、およびライン占有率ηと周波数変動量ΔFの関係を示すグラフである図5、図7と似ていることが解る。
つまり、本実施形態に係る効果は、電極膜を除いた水晶基板30単体における弾性表面波の伝播においても奏することができるということが言える。
In these figures (FIGS. 12 to 23), although there is a slight difference in any of the graphs, the line occupancy η, the secondary temperature coefficient β, and the line occupancy of only the
That is, it can be said that the effect according to the present embodiment can also be achieved in the propagation of the surface acoustic wave in the
図25に、図24に示すグラフにおけるη1によって得られるψと溝深さGとの関係をまとめた。なお、η1を選択した理由については上述した通りである。図25に示すように、電極膜の膜厚が変化した場合であっても、ψの角度には殆ど違いは無く、ψの最適角度は溝深さGの変動にしたがって変化して行くことが解る。これも、二次温度係数βの変化が水晶基板30の形態に起因する割合が高いことの裏付けということができる。
FIG. 25 summarizes the relationship between ψ obtained by η1 and the groove depth G in the graph shown in FIG. The reason for selecting η1 is as described above. As shown in FIG. 25, even when the film thickness of the electrode film changes, there is almost no difference in the angle of ψ, and the optimum angle of ψ may change according to the variation of the groove depth G. I understand. This can also be said to support that the ratio of the change in the secondary temperature coefficient β is high due to the form of the
上記と同様にして、二次温度係数β=−0.01ppm/℃2となるψとβ=+0.01ppm/℃2となるψについて溝深さGとの関係を求め、図26、図27にまとめた。これらのグラフ(図25〜図27)から−0.01≦β≦+0.01とすることのできるψの角度を求めると、上記条件下における好適なψの角度範囲は43°<ψ<45°と定めることができ、さらに好適には43.2°≦ψ≦44.2と定めることができる。 In the same manner as described above, we obtain the relationship between the secondary temperature coefficient β = -0.01ppm / ℃ 2 become ψ and β = + 0.01ppm / ℃ 2 become grooves for ψ depth G, 26, 27 Summarized in When the angle of ψ that can satisfy −0.01 ≦ β ≦ + 0.01 is obtained from these graphs (FIGS. 25 to 27), the preferable angle range of ψ under the above conditions is 43 ° <ψ <45. It can be defined as °, more preferably 43.2 ° ≦ ψ ≦ 44.2.
次に、図28にθの角度を振った際の二次温度係数βの変化、すなわちθと二次温度係数βとの関係を示す。ここで、シミュレーションに用いたSAWデバイスは、カット角とSAW伝搬方向をオイラー角表示で(0,θ,ψ)とし、溝深さGを0.04λとした水晶基板であり、電極膜厚Hは0.02λとしている。なお、ψに関しては、θの設定角度に基づいて、上述した角度範囲内において、適宜二次温度係数βの絶対値が最少となる値を選択した。また、ηに関しては、上記数式(15)に従って、0.6383とした。 Next, FIG. 28 shows a change in the secondary temperature coefficient β when the angle θ is changed, that is, the relationship between θ and the secondary temperature coefficient β. Here, the SAW device used for the simulation is a quartz substrate in which the cut angle and the SAW propagation direction are represented by Euler angles (0, θ, ψ) and the groove depth G is 0.04λ, and the electrode thickness H Is 0.02λ. As for ψ, a value that minimizes the absolute value of the secondary temperature coefficient β was appropriately selected within the above-described angle range based on the set angle of θ. Further, η was set to 0.6383 according to the above formula (15).
このような条件の下、θと二次温度係数βとの関係を示す図28からは、θが117°以上142°以下の範囲内であれば、二次温度係数βの絶対値が0.01ppm/℃2の範囲内にある事を読み取ることができる。よって、上記のような設定値において、θを117°≦θ≦142°の範囲で定めることによれば、良好な周波数温度特性を持ったSAW共振子10を構成することができると言える。
Under such conditions, FIG. 28 showing the relationship between θ and the secondary temperature coefficient β shows that the absolute value of the secondary temperature coefficient β is 0. As long as θ is in the range of 117 ° to 142 °. It can be read that it is within the range of 01 ppm / ° C. 2 . Therefore, it can be said that the
図29は、オイラー角表示で(φ,123°,43.77°)の水晶基板30を用い、溝深さGを0.04λ、電極膜厚Hを0.02λ、及びライン占有率ηを0.65とした場合において、φの角度と二次温度係数βとの関係を示すグラフである。
FIG. 29 shows a
図29からは、φが−2°、+2°の場合にはそれぞれ二次温度係数βが−0.01よりも低くなってしまっているが、φが−1.5°から+1.5°の範囲であれば確実に、二次温度係数βの絶対値が0.01の範囲内にある事を読み取ることができる。よって、上記のような設定値においてφを−1.5°≦φ≦+1.5°、好適には−1°≦φ≦+1°の範囲で定めることによれば、良好な周波数温度特性を持ったSAW共振子10を構成することができる。
From FIG. 29, when φ is −2 ° and + 2 °, the secondary temperature coefficient β is lower than −0.01, but φ is −1.5 ° to + 1.5 °. If it is within the range, it can be reliably read that the absolute value of the secondary temperature coefficient β is within the range of 0.01. Therefore, by setting φ within the range of −1.5 ° ≦ φ ≦ + 1.5 °, preferably −1 ° ≦ φ ≦ + 1 ° at the set values as described above, good frequency temperature characteristics can be obtained. The
上記説明では、φ、θ、ψはそれぞれ、一定条件の下に溝深さGとの関係において最適値の範囲を導き出している。これに対し、図30では、−40℃〜+85℃における周波数変動量が最小となる非常に望ましいθとψの関係を示しており、その近似式を求めている。図30によれば、ψの角度は、θの角度上昇に伴って変化し、三次曲線を描くように上昇する。なお、図30の例では、θ=117°とした場合のψは42.79°であり、
θ=142°とした場合のψは49.57°である。これらのプロットを近似曲線として示すと図30中破線で示す曲線となり、近似式としては数式(17)で示すことができる。
![]()
When θ = 142 °, ψ is 49.57 °. When these plots are shown as approximate curves, they become curves shown by broken lines in FIG. 30, and can be expressed by equation (17) as an approximate expression.
![]()
このことより、ψはθが定まることにより定めることができ、θの範囲を117°≦θ≦142°とした場合におけるψの範囲は42.79°≦ψ≦49.57°とすることができる。なお、シミュレーションにおける溝深さG、電極膜厚Hはそれぞれ、G=0.04λ、H=0.02λとした。 From this, ψ can be determined by defining θ, and the range of ψ when the range of θ is 117 ° ≦ θ ≦ 142 ° is 42.79 ° ≦ ψ ≦ 49.57 °. it can. In the simulation, the groove depth G and the electrode film thickness H were G = 0.04λ and H = 0.02λ, respectively.
上記のような理由により、本実施形態において種々定めた条件によりSAW共振子10を構成することによれば、目標値を満たす良好な周波数温度特性を実現可能なSAW共振子とすることができる。
For the reasons described above, by configuring the
また、本実施形態に係るSAW共振子10では、数式(6)や図12〜図23に示したように、電極膜の膜厚Hを0<H≦0.035λの範囲とした上で周波数温度特性の改善を図っている。これは、従来のように膜厚Hを極度に厚くして周波数温度特性の改善を図るものとは異なり、耐環境特性を維持したまま周波数温度特性の改善を実現するものである。図37に、ヒートサイクル試験における電極膜厚(Al電極膜厚)と周波数変動との関係を示す。なお、図37に示したヒートサイクル試験の結果は、−55℃雰囲気下においてSAW共振子を30分間晒した上で雰囲気温度+125℃まで上昇させて30分晒すというサイクルを8回続けた後のものである。図37からは、電極膜厚Hを0.06λにし、且つ電極指間溝を設けない場合に比べ、本実施形態に係るSAW共振子10の電極膜厚Hの範囲では、周波数変動(F変動)が、1/3以下になっていることを読み取ることができる。なお、図37は何れのプロットもH+G=0.06λとしている。
Further, in the
また、図37と同じ条件で製造されたSAW共振子について、125℃雰囲気に1000時間放置する高温放置試験を行ったところ、従来のSAW共振子(H=0.06λ且つG=0)に比べ、本実施形態に係るSAW共振子(H=0.03λ且つG=0.03λ、H=0.02λ且つG=0.04λ、H=0.015λ且つG=0.045λ、H=0.01λ且つG=0.05λの4条件)の試験前後の周波数変動量が1/3以下になることを確認した。 In addition, a high-temperature storage test in which the SAW resonator manufactured under the same conditions as in FIG. 37 was left in an atmosphere at 125 ° C. for 1000 hours was compared with a conventional SAW resonator (H = 0.06λ and G = 0). The SAW resonator according to this embodiment (H = 0.03λ and G = 0.03λ, H = 0.02λ and G = 0.04λ, H = 0.015λ, G = 0.045λ, H = 0. It was confirmed that the amount of frequency fluctuation before and after the test (4 conditions of 01λ and G = 0.05λ) was 1/3 or less.
上記のような条件の下、H+G=0.067λ(アルミ膜厚2000Å、溝深さ4700Å)、IDTのライン占有率ηi=0.6、反射器のライン占有率ηr=0.8、オイラー角(0°,123°,43.5°)、IDTの対数120対、交差幅40λ(λ=10μm)、反射器本数(片側あたり)72本(36対)、電極指の傾斜角度なし(電極指の配列方向とSAWの位相速度方向が一致)、といった条件で製造されたSAW共振子10では、図31に示すような周波数温度特性を示すこととなる。
Under the above conditions, H + G = 0.067λ (aluminum film thickness 2000 mm, groove depth 4700 mm), IDT line occupancy ηi = 0.6, reflector line occupancy ηr = 0.8, Euler angle (0 °, 123 °, 43.5 °), 120 pairs of IDTs, intersection width 40λ (λ = 10 μm), 72 reflectors (per side) (36 pairs), no inclination angle of electrode fingers (electrodes The
図31は、試験片個数n=4個による周波数温度特性をプロットしたものである。図31によれば、これらの試験片による動作温度範囲内における周波数変動量ΔFは約20ppm以下に抑制されていることを読み取ることができる。 FIG. 31 is a plot of frequency temperature characteristics with the number of test pieces n = 4. According to FIG. 31, it can be read that the frequency fluctuation amount ΔF in the operating temperature range by these test pieces is suppressed to about 20 ppm or less.
本実施形態では溝深さGや電極膜厚H等による周波数温度特性への影響を説明してきた。しかし溝深さGと電極膜厚Hを合わせた深さ(段差)は、等価回路定数やCI値等の静特性やQ値にも影響を与える。例えば図32、段差を0.062λ〜0.071λまで変化させた場合における段差とCI値との関係を示すグラフである。図32によればCI値
は、段差を0.067λとした時に収束し、段差をそれ以上大きくした場合であっても良化しない(低くならない)ということを読み取ることができる。
In the present embodiment, the influence of the groove depth G and the electrode film thickness H on the frequency temperature characteristics has been described. However, the depth (step) obtained by combining the groove depth G and the electrode film thickness H also affects the static characteristics such as equivalent circuit constants and CI values, and the Q value. For example, FIG. 32 is a graph showing the relationship between the step and the CI value when the step is changed from 0.062λ to 0.071λ. According to FIG. 32, it can be read that the CI value converges when the step is set to 0.067λ, and does not improve (is not lowered) even when the step is further increased.
図31に示すような周波数温度特性を示すSAW共振子10における周波数と等価回路定数、および静特性を図33にまとめた。ここで、Fは周波数、QはQ値、γは容量比、CIはCI(クリスタルインピーダンス:Crystal Impedance)値、Mは性能指数(フィ
ギュアオブメリット:Figure of Merit)をそれぞれ示す。
FIG. 33 summarizes the frequencies, equivalent circuit constants, and static characteristics of the
また、図35には、従来のSAW共振子と、本実施形態に係るSAW共振子10における段差とQ値との関係を比較するためのグラフを示す。なお、図35においては、太線で示すグラフが本実施形態に係るSAW共振子10の特性を示すものであり、電極指間に溝を設け、且つストップバンド上端モードの共振を用いたものである。細線で示すグラフが従来のSAW共振子の特性を示すものであり、電極指間に溝を設けずにストップバンド上端モードの共振を用いたものである。図35から明らかなように、電極指間に溝を設け、且つストップバンド上端モードの共振を用いると、段差(G+H)が0.0407λ(4.07%λ)以上の領域において、電極指間に溝を設けずにストップバンド下端モードの共振を用いた場合よりも高いQ値が得られる。
FIG. 35 shows a graph for comparing the relationship between the step and the Q value in the conventional SAW resonator and the
なお、シミュレーションに係るSAW共振子の基本データは以下の通りである。
・本実施形態に係るSAW共振子10の基本データ
H:0.02λ
G:変化
IDTライン占有率ηi:0.6
反射器ライン占有率ηr:0.8
オイラー角(0°,123°,43.5°)
対数:120
交差幅:40λ(λ=10μm)
反射器本数(片側あたり):60
電極指の傾斜角度なし
・従来のSAW共振子の基本データ
H:変化
G:ゼロ
IDTライン占有率ηi:0.4
反射器ライン占有率ηr:0.3
オイラー角(0°,123°,43.5°)
対数:120
交差幅:40λ(λ=10μm)
反射器本数(片側あたり):60
電極指の傾斜角度なし
The basic data of the SAW resonator according to the simulation is as follows.
Basic data H of the
G: Change IDT line occupancy ηi: 0.6
Reflector line occupancy ηr: 0.8
Euler angles (0 °, 123 °, 43.5 °)
Logarithm: 120
Crossing width: 40λ (λ = 10μm)
Number of reflectors (per one side): 60
No inclination angle of electrode fingers Basic data of conventional SAW resonator H: Change G: Zero IDT line occupancy ηi: 0.4
Reflector line occupancy ηr: 0.3
Euler angles (0 °, 123 °, 43.5 °)
Logarithm: 120
Crossing width: 40λ (λ = 10μm)
Number of reflectors (per one side): 60
No electrode finger tilt angle
これらのSAW共振子の特性を比較するため図33や図35を参照すると、本実施形態に係るSAW共振子10が、いかに高Q化されているかを理解することができる。このような高Q化は、エネルギー閉じ込め効果の向上によるものであると考えられ、以下の理由による。
Referring to FIGS. 33 and 35 for comparing the characteristics of these SAW resonators, it can be understood how the
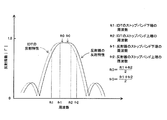
ストップバンドの上端モードで励振した弾性表面波を効率良くエネルギー閉じ込めするためには、図36のように、IDT12のストップバンド上端の周波数ft2を、反射器20のストップバンド下端の周波数fr1と反射器20のストップバンド上端の周波数fr2との間に設定すれば良い。即ち、
![]()
![]()
これに対し、IDT12のストップバンド上端の周波数ft2と反射器20のストップバンド下端の周波数fr1、反射器20のストップバンド上端の周波数fr2との関係をft2<fr1の状態やfr2<ft2の状態に設定してしまうと、IDT12のストップバンド上端周波数ft2において反射器20の反射係数Γが小さくなってしまい、強いエネルギー閉じ込め状態を実現することが困難になってしまう。
On the other hand, the relationship between the frequency ft2 at the upper end of the stop band of the
ここで、数式(18)の状態を実現するためには、反射器20のストップバンドをIDT12のストップバンドよりも高域側へ周波数シフトする必要がある。具体的には、IDT12の電極指18の配列周期よりも、反射器20の導体ストリップ22の配列周期を小さくすることで実現できる。また、他の方法としては、IDT12の電極指18として形成された電極膜の膜厚よりも反射器20の導体ストリップ22として形成された電極膜の膜厚を薄くしたり、IDT12の電極指間溝の深さよりも反射器20の導体ストリップ間溝の深さを浅くすることで実現できる。また、これらの手法を複数組み合わせて適用しても良い。
Here, in order to realize the state of Equation (18), it is necessary to shift the frequency of the stop band of the
なお図33によれば、高Q化の他、高いフィギュアオブメリットMを得ることができているということができる。また、図34は、図33を得たSAW共振子におけるインピーダンスZと周波数との関係を示すグラフである。図34からは、共振点付近に無用なスプリアスが存在していない事を読み取ることができる。 In addition, according to FIG. 33, it can be said that high figure of merit M can be obtained in addition to high Q. FIG. 34 is a graph showing the relationship between impedance Z and frequency in the SAW resonator obtained in FIG. From FIG. 34, it can be read that there is no useless spurious near the resonance point.
上記実施形態では、SAW共振子10を構成するIDT12はすべての電極指が交互に交差しているように示した。しかし、本発明にかかるSAW共振子10は、その水晶基板のみによっても相当な効果を奏することができる。このため、IDT12における電極指18を間引きした場合であっても、同様な効果を奏することができる。
In the above embodiment, the
また、溝32に関しても、電極指18間や反射器20の導体ストリップ22間に部分的に設けるようにしても良い。特に、振動変位の高いIDT12の中央部は周波数温度特性に支配的な影響を与えるため、その部分のみに溝32を設ける構造としても良い。このような構造であっても、周波数温度特性が良好なSAW共振子10とすることができる。
Further, the
また、上記実施形態では、電極膜としてAlまたはAlを主体とする合金を用いる旨記載した。しかしながら、上記実施形態と同様な効果を奏することのできる金属であれば、他の金属材料を用いて電極膜を構成しても良い。 Moreover, in the said embodiment, it described that the alloy which has Al or Al as a main component was used as an electrode film. However, the electrode film may be configured using other metal materials as long as the metal can achieve the same effect as the above embodiment.
上記実施形態ではSAW共振子として説明したが、本発明に係るSAW共振子はSAWフィルタとしても採用することができる。また、上記実施形態はIDTを一つだけ設けた一端子対SAW共振子であるが、本発明はIDTを複数設けた二端子対SAW共振子にも適用可能であり、縦結合型や横結合型の二重モードSAWフィルタや多重モードSAWフィルタにも適用可能である。 Although the SAW resonator has been described in the above embodiment, the SAW resonator according to the present invention can also be used as a SAW filter. The above embodiment is a one-terminal-pair SAW resonator provided with only one IDT, but the present invention can also be applied to a two-terminal-pair SAW resonator provided with a plurality of IDTs. The present invention is also applicable to other types of dual mode SAW filters and multimode SAW filters.
図39には、本発明を適用した二端子対SAW共振子の構成を示す。
二端子対SAW共振子10Aは、水晶基板30と、水晶基板30の主面上の弾性表面波の伝搬方向に沿って配列された2つのIDT12A、12Bと、IDT12A、12Bの両側に配置された2つの反射器20とを基本として構成される。IDT12Aは一対の櫛歯状電極14c、14dで構成され、IDT12Bは一対の櫛歯状電極14e、14fで構成されている。櫛歯状電極14c、14d、櫛歯状電極14e、14fは、互いに間挿し合う複数の電極指18を有している。IDT12Aの一方の櫛歯状電極14cは入力端子INに接続され、他方の櫛歯状電極14dは接地されている。IDT12Bの一方の櫛歯状電極14fは出力端子OUTに接続され、他方の櫛歯状電極14eは接地されている。水晶基板30主面上における、IDT12A、12Bの電極指18間および反射器20の導体ストリップ22間には、溝32が設けられている。
FIG. 39 shows a configuration of a two-terminal pair SAW resonator to which the present invention is applied.
The two-terminal
なお、二端子対SAW共振子10Aを構成するIDTの数は2つに限定されることはなく、二端子対を有するSAW共振子であればIDTの数はいくつであってもよい。
Note that the number of IDTs constituting the two-terminal
二端子対SAW共振子10Aは、一端子対のSAW共振子10とIDTの配置が異なるが、一端子対のSAW共振子10と同様のメカニズムで動作するため、上述したSAW共振子10についての周波数温度特性等の各種特性は、二端子対SAW共振子10Aについても当てはまる。
The two-terminal
以下の各条件について、二端子対SAW共振子10Aの周波数−挿入損失の関係を示す損失特性について測定した結果、何れも低損失となり、良好な共振特性が得られていることが確認された。
(1)交差幅:40λ、総対数:120(1つのIDTの対数が60)
(2)交差幅:40λ、総対数:180(1つのIDTの対数が90)
(3)交差幅:40λ、総対数:300(1つのIDTの対数が150)
(4)交差幅:80λ、総対数:180(1つのIDTの対数が90)
Under the following conditions, the loss characteristics indicating the frequency-insertion loss relationship of the two-terminal
(1) Crossing width: 40λ, total logarithm: 120 (the logarithm of one IDT is 60)
(2) Crossing width: 40λ, total logarithm: 180 (the logarithm of one IDT is 90)
(3) Crossing width: 40λ, total logarithm: 300 (the logarithm of one IDT is 150)
(4) Crossing width: 80λ, total logarithm: 180 (the logarithm of one IDT is 90)
以上により、交差幅が40λ〜80λの範囲であって、かつ、総対数が120〜300の範囲においては、損失が少なく、エネルギー閉じ込め効果があり、良好な共振特性が得られる共振子として実現可能であることが確認された。 As described above, when the crossing width is in the range of 40λ to 80λ and the total logarithm is in the range of 120 to 300, the loss can be reduced, the energy confinement effect can be obtained, and the resonator can be realized with good resonance characteristics. It was confirmed that.
このような二端子対SAW共振子10Aに対して、適切な終端インピーダンスを施すことにより、二端子対SAW共振子10Aを用いた周波数温度特性のよいフィルタ(縦結合2重モードSAWフィルタ)を実現することができる。
By applying appropriate termination impedance to such a two-terminal
次に、本発明に係るSAW発振器について、図38を参照して説明する。本発明に係るSAW発振器は図38に示すように、上述したSAW共振子10と、このSAW共振子10のIDT12に電圧を印加して駆動制御するIC(integrated circuit)50と、これらを収容するパッケージとから成る。なお、図38において、図38(A)はリッドを除いた平面図であり、図38(B)は、同図(A)におけるA−A断面を示す図である。
Next, a SAW oscillator according to the present invention will be described with reference to FIG. As shown in FIG. 38, the SAW oscillator according to the present invention accommodates the above-described
実施形態に係るSAW発振器100では、SAW共振子10とIC50とを同一のパッケージ56に収容し、パッケージ56の底板56aに形成された電極パターン54a〜54gとSAW共振子10の櫛歯状電極14a,14b、およびIC50のパッド52a〜52fとを金属ワイヤ60により接続している。そして、SAW共振子10とIC50とを収容したパッケージ56のキャビティは、リッド58により気密に封止している。このような構成とすることで、IDT12(図1参照)とIC50、及びパッケージ56の底面に形成された図示しない外部実装電極とを電気的に接続することができる。
なお、SAW共振子10に替えて二端子対SAW共振子10Aをパッケージ56に収容して、SAW発振器としてもよい。
In the
Instead of the
また、SAW共振子10や二端子対SAW共振子10Aは、電子機器に搭載してクロック源として用いることができる。ここで、電子機器としては、携帯電話機、ハードディスク、サーバ、コンピュータ、有線・無線基地局、車載通信機器等がある。
The
10………弾性表面波共振子(SAW共振子)、10A………二端子対弾性表面波共振子(二端子対SAW共振子)、12,12A,12B………IDT、14a,14b,14c,14d,14e,14f………櫛歯状電極、16………バスバー、18………電極指、20………反射器、22………導体ストリップ、30………水晶基板、32………溝。
DESCRIPTION OF
Claims (10)
前記弾性表面波の波長をλ、前記電極指間溝の深さをGとした場合に、
かつ、前記IDTのライン占有率をηとした場合に、前記電極指間溝の深さGと前記ライン占有率ηとが
When the wavelength of the surface acoustic wave is λ and the depth of the inter-electrode finger groove is G,
Further, when the line occupation ratio of the IDT is η, the depth G of the inter-electrode finger groove and the line occupation ratio η are
前記電極指間溝の深さGが、
The depth G of the inter-electrode finger groove is
前記IDTの電極膜厚をHとした場合に、
When the electrode film thickness of the IDT is H,
前記ライン占有率ηが、
The line occupancy η is
前記電極指間溝の深さGと前記電極膜厚Hとの和が、
The sum of the inter-electrode finger groove depth G and the electrode film thickness H is:
記ψと前記θが、
前記IDTにおけるストップバンド上端モードの周波数をft2、前記IDTを弾性表面波の伝搬方向に挟み込むように配置される反射器におけるストップバンド下端モードの周波数をfr1、前記反射器のストップバンド上端モードの周波数をfr2としたとき、
The frequency of the stop band upper end mode in the IDT is ft2, the frequency of the stop band lower end mode in the reflector arranged so as to sandwich the IDT in the propagation direction of the surface acoustic wave is fr1, and the frequency of the stop band upper end mode of the reflector. Is fr2,
前記反射器を構成する導体ストリップ間に導体ストリップ間溝を設け、
前記電極指間溝よりも前記導体ストリップ間溝の深さの方が浅いことを特徴とする二端子対弾性表面波共振子。 The two-terminal-pair surface acoustic wave resonator according to any one of claims 1 to 7,
A conductor strip groove is provided between conductor strips constituting the reflector;
The two-terminal-pair surface acoustic wave resonator according to claim 1, wherein the groove between the conductor strips is shallower than the groove between the electrode fingers.
An electronic apparatus comprising the two-terminal-pair surface acoustic wave resonator according to any one of claims 1 to 8.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014238236A JP2015084534A (en) | 2014-11-25 | 2014-11-25 | Two-terminal pair surface acoustic wave resonator, surface acoustic wave oscillator, and electronic apparatus |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014238236A JP2015084534A (en) | 2014-11-25 | 2014-11-25 | Two-terminal pair surface acoustic wave resonator, surface acoustic wave oscillator, and electronic apparatus |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010188742A Division JP5750683B2 (en) | 2010-08-25 | 2010-08-25 | Two-terminal-pair surface acoustic wave resonator, surface acoustic wave oscillator and electronic device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2015084534A true JP2015084534A (en) | 2015-04-30 |
| JP2015084534A5 JP2015084534A5 (en) | 2015-07-09 |
Family
ID=53047923
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014238236A Pending JP2015084534A (en) | 2014-11-25 | 2014-11-25 | Two-terminal pair surface acoustic wave resonator, surface acoustic wave oscillator, and electronic apparatus |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2015084534A (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113346859A (en) * | 2021-07-07 | 2021-09-03 | 无锡中微晶园电子有限公司 | Surface acoustic wave resonator with high Q value and preparation method thereof |
Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6192011A (en) * | 1984-10-11 | 1986-05-10 | Nec Kansai Ltd | Manufacture of surface acoustic wave element |
| JPH057124A (en) * | 1991-06-26 | 1993-01-14 | Nikko Kyodo Co Ltd | Surface acoustic wave device |
| JP2000216632A (en) * | 1999-01-20 | 2000-08-04 | Kubota Corp | Surface acoustic wave oscillator |
| JP2002330051A (en) * | 2001-04-27 | 2002-11-15 | Murata Mfg Co Ltd | Surface acoustic wave unit and surface acoustic wave device using the same |
| JP2006203408A (en) * | 2005-01-19 | 2006-08-03 | Epson Toyocom Corp | Surface acoustic wave device |
| JP2007259414A (en) * | 2006-02-24 | 2007-10-04 | Seiko Epson Corp | Method for fabricating elastic surface wave equipment, method for ajusting its temperature characteristics, and elastic surface wave equipment manufactured thereby |
| JP2007267033A (en) * | 2006-03-28 | 2007-10-11 | Epson Toyocom Corp | Surface acoustic wave element and surface acoustic wave device |
| JP2007288812A (en) * | 2005-09-30 | 2007-11-01 | Epson Toyocom Corp | Surface acoustic wave device, module device, oscillation circuit and method for manufacturing surface acoustic wave device |
| JP2007300287A (en) * | 2006-04-28 | 2007-11-15 | Epson Toyocom Corp | Surface acoustic wave element, surface acoustic wave device, and electronic apparatus |
| JP2009225420A (en) * | 2008-02-20 | 2009-10-01 | Epson Toyocom Corp | Surface acoustic wave device and surface acoustic wave oscillator |
-
2014
- 2014-11-25 JP JP2014238236A patent/JP2015084534A/en active Pending
Patent Citations (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6192011A (en) * | 1984-10-11 | 1986-05-10 | Nec Kansai Ltd | Manufacture of surface acoustic wave element |
| JPH057124A (en) * | 1991-06-26 | 1993-01-14 | Nikko Kyodo Co Ltd | Surface acoustic wave device |
| JP2000216632A (en) * | 1999-01-20 | 2000-08-04 | Kubota Corp | Surface acoustic wave oscillator |
| JP2002330051A (en) * | 2001-04-27 | 2002-11-15 | Murata Mfg Co Ltd | Surface acoustic wave unit and surface acoustic wave device using the same |
| JP2006203408A (en) * | 2005-01-19 | 2006-08-03 | Epson Toyocom Corp | Surface acoustic wave device |
| JP2007288812A (en) * | 2005-09-30 | 2007-11-01 | Epson Toyocom Corp | Surface acoustic wave device, module device, oscillation circuit and method for manufacturing surface acoustic wave device |
| JP2007259414A (en) * | 2006-02-24 | 2007-10-04 | Seiko Epson Corp | Method for fabricating elastic surface wave equipment, method for ajusting its temperature characteristics, and elastic surface wave equipment manufactured thereby |
| JP2007267033A (en) * | 2006-03-28 | 2007-10-11 | Epson Toyocom Corp | Surface acoustic wave element and surface acoustic wave device |
| JP2007300287A (en) * | 2006-04-28 | 2007-11-15 | Epson Toyocom Corp | Surface acoustic wave element, surface acoustic wave device, and electronic apparatus |
| JP2009225420A (en) * | 2008-02-20 | 2009-10-01 | Epson Toyocom Corp | Surface acoustic wave device and surface acoustic wave oscillator |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113346859A (en) * | 2021-07-07 | 2021-09-03 | 无锡中微晶园电子有限公司 | Surface acoustic wave resonator with high Q value and preparation method thereof |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5488825B2 (en) | Surface acoustic wave resonator and surface acoustic wave oscillator | |
| JP4645923B2 (en) | Surface acoustic wave resonator and surface acoustic wave oscillator | |
| JP5934464B2 (en) | Surface acoustic wave resonator, surface acoustic wave oscillator, and electronic device | |
| JP5678486B2 (en) | Surface acoustic wave resonator, surface acoustic wave oscillator and electronic device | |
| JP5652606B2 (en) | Surface acoustic wave resonator, surface acoustic wave oscillator, and electronic device | |
| US8471434B2 (en) | Surface acoustic wave device, surface acoustic wave oscillator, and electronic apparatus | |
| JP2015084534A (en) | Two-terminal pair surface acoustic wave resonator, surface acoustic wave oscillator, and electronic apparatus | |
| JP5737491B2 (en) | Surface acoustic wave filters, electronic equipment | |
| JP5750683B2 (en) | Two-terminal-pair surface acoustic wave resonator, surface acoustic wave oscillator and electronic device | |
| JP5737490B2 (en) | Transversal surface acoustic wave device, surface acoustic wave oscillator and electronic equipment | |
| JP5850109B2 (en) | Surface acoustic wave resonator, surface acoustic wave oscillator, and electronic device | |
| JP2015073305A (en) | Surface acoustic wave filter, electronic apparatus | |
| JP2015084535A (en) | Transversal type surface acoustic wave device, surface acoustic wave oscillator, and electronic apparatus | |
| JP2012049631A (en) | Surface acoustic wave resonator, surface acoustic wave oscillator, electronic apparatus | |
| JP2016167652A (en) | Surface acoustic wave resonator, surface acoustic wave oscillator and electronic apparatus | |
| JP2015029358A (en) | Surface acoustic wave resonator, surface acoustic wave oscillator, and electronic device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150406 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150424 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150415 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20150424 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150929 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20151130 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20160223 |