JP2014199595A - Work load estimation program, work load estimation method and information processing device - Google Patents
Work load estimation program, work load estimation method and information processing device Download PDFInfo
- Publication number
- JP2014199595A JP2014199595A JP2013075026A JP2013075026A JP2014199595A JP 2014199595 A JP2014199595 A JP 2014199595A JP 2013075026 A JP2013075026 A JP 2013075026A JP 2013075026 A JP2013075026 A JP 2013075026A JP 2014199595 A JP2014199595 A JP 2014199595A
- Authority
- JP
- Japan
- Prior art keywords
- load
- worker
- work
- posture
- workers
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images










Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02P—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN THE PRODUCTION OR PROCESSING OF GOODS
- Y02P90/00—Enabling technologies with a potential contribution to greenhouse gas [GHG] emissions mitigation
- Y02P90/02—Total factory control, e.g. smart factories, flexible manufacturing systems [FMS] or integrated manufacturing systems [IMS]
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02P—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN THE PRODUCTION OR PROCESSING OF GOODS
- Y02P90/00—Enabling technologies with a potential contribution to greenhouse gas [GHG] emissions mitigation
- Y02P90/30—Computing systems specially adapted for manufacturing
Landscapes
- General Factory Administration (AREA)
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
Abstract
Description
本発明は、作業負荷推定プログラム、作業負荷推定方法、及び情報処理装置に関する。 The present invention relates to a workload estimation program, a workload estimation method, and an information processing apparatus.
工場等における製品の組立は、複数工程に分割して実施されるのが一般的である。また、分割される工程は、各工程の作業時間を均等にしたり、特定の工程での待ち時間が発生しないように計画する必要がある。 Assembling of products in factories and the like is generally performed by dividing into a plurality of processes. Moreover, it is necessary to plan the process divided | segmented so that the working time of each process may be equalized, and the waiting time in a specific process does not generate | occur | produce.
従来のシミュレーションツールは、製品を構成する部品の組立時間を細分化し、組立順序と組立時間とに基づいて、工程毎の作業時間が均等になるように工程を分割している(例えば、特許文献1参照)。 The conventional simulation tool subdivides the assembly time of the parts constituting the product, and divides the process so that the work time for each process becomes equal based on the assembly order and the assembly time (for example, Patent Documents) 1).
しかしながら、従来手法では、各工程の作業を実施する作業者の疲労度合という観点で、特定の作業者への負荷の集中があるか否かの判断ができない。例えば、実際の組立作業において、重い部品を組み立てる場合と軽い部品を組み立てる場合とでは、作業時間が同じであっても作業者への負荷が大きく異なる。また、作業中の姿勢の違いによっても負荷が異なってくるのは明らかである。 However, in the conventional method, it is impossible to determine whether or not there is a load concentration on a specific worker from the viewpoint of the degree of fatigue of the worker who performs the work of each process. For example, in an actual assembling operation, when a heavy part is assembled and when a light part is assembled, the load on the operator is greatly different even if the working time is the same. It is clear that the load varies depending on the posture during work.
1つの側面では、本発明は、適切に作業負荷を推定することを目的とする。 In one aspect, the present invention aims to properly estimate the workload.
一態様における作業負荷推定プログラムは、作業に応じた作業者の姿勢の時間的な変化を示すデータ又は作業に応じた作業者の保持物を示すデータを取得し、作業者の姿勢と負荷との対応関係を示すデータ又は保持物と負荷との対応関係を示すデータを参照して、取得した該データに含まれる作業者の各姿勢に対応する負荷又は取得した該データに含まれる作業者の保持物に対応する負荷を特定し、特定した前記負荷を集計して、前記作業における前記作業者の総負荷を算出する、処理をコンピュータに実行させる。 The workload estimation program in one aspect obtains data indicating a temporal change in the posture of the worker according to the work or data indicating a worker's holding according to the work, and calculates the posture and load of the worker. Referring to data indicating correspondence or data indicating correspondence between the stored object and the load, load corresponding to each posture of the worker included in the acquired data or retention of the worker included in the acquired data A load corresponding to an object is specified, the specified loads are totaled, and a total load of the worker in the work is calculated.
適切に作業負荷を推定することができる。 The workload can be estimated appropriately.
以下、添付図面を参照しながら実施例について詳細に説明する。 Hereinafter, embodiments will be described in detail with reference to the accompanying drawings.
<情報処理装置の機能構成例>
図1は、情報処理装置の機能構成の一例を示す図である。図1に示す情報処理装置10は、入力手段11と、作業作成手段12と、負荷算出手段13と、表示手段14と、記憶手段15とを有する。負荷算出手段13は、姿勢判定手段13−1と、部位毎負荷算出手段13−2と、作業者毎負荷集計手段13−3とを有する。また、記憶手段15は、作業テーブル15−1と、姿勢毎負荷テーブル15−2と、保持物毎負荷係数テーブル15−3と、作業者負荷テーブル15−4とを有する。
<Functional configuration example of information processing apparatus>
FIG. 1 is a diagram illustrating an example of a functional configuration of the information processing apparatus. The
入力手段11は、管理者等のユーザが、工場等の所定の施設内で行う作業内容等の設定等の入力を受け付ける。また、入力手段11は、作業者の選別、スケジュール等の情報の入力を受け付ける。 The input unit 11 accepts input such as setting of work contents performed by a user such as an administrator in a predetermined facility such as a factory. Further, the input unit 11 accepts input of information such as worker selection and schedule.
作業作成手段12は、入力手段11により得られる各種情報に基づいて、作業の工程計画を作成し、作成した工程に対する作業者毎の作業内容(作業スケジュール)を作成する。例えば、作業作成手段12は、工場等における製品の組み立て作業を1又は複数の工程に分割し、分割された各工程の作業時間に対応させて、特定の工程での待ち時間が発生しないように、作業者等の割り当てを行う。なお、工程計画の作成手法としては、例えばProgram Evaluation and Review Technique(PERT)法や期間山積法、時点計画法を用いることができるが、これに限定されるものではない。 The work creation means 12 creates a work process plan based on various information obtained by the input means 11, and creates work contents (work schedule) for each worker for the created process. For example, the work creation means 12 divides a product assembly work in a factory or the like into one or a plurality of processes, and corresponds to the work time of each divided process so that a waiting time in a specific process does not occur. Assign workers. As a process plan creation method, for example, a Program Evaluation and Review Technique (PERT) method, a period pile method, or a time plan method can be used, but the method is not limited to this.
例えば、作業作成手段12は、作業者の姿勢の時間的な変化又は作業者の保持物の情報を含む、複数の作業者のそれぞれの作業内容を作成する。また、作業作成手段12は、負荷算出手段13により算出された作業内容に応じた作業者の総負荷等に基づいて、複数の作業者のうちの少なくとも一人の作業者についての作業内容を変更する。作業作成手段12は、負荷算出手段13により算出された負荷結果に基づいて、例えば各作業者の負荷が均等になるように、工程分割や作業者の交代、休憩時間等に基づく作業内容の作成を再度実行し、複数の作業者の総負荷の偏りを減じた変更作業内容を出力する。作業作成手段12は、作成された作業者毎の作業内容等を例えば作業テーブル15−1に記憶する。
For example, the work creation means 12 creates the work contents of each of a plurality of workers, including information on the temporal change of the worker's posture or the information held by the workers. Further, the
負荷算出手段13は、作業作成手段12により得られる作業の割り当て情報に対して、作業テーブル15−1を参照して作業者毎の作業負荷をシミュレーションにより算出する。例えば、負荷算出手段13は、所定時間毎や所定作業毎に、本実施形態における作業者の負荷を考慮していない状態での作業者の姿勢や保持物の情報を取得し、取得した姿勢や保持物等に基づいて、負荷を考慮した場合の作業負荷を推定する。なお、保持物は、作業者の手に持つ物に限定されるものではなく、例えば手や頭、腰等に装着する物や、力を加えて移動させる物等も含む。
The load calculating means 13 calculates the work load for each worker by simulation with reference to the work table 15-1 for the work assignment information obtained by the
具体的には、負荷算出手段13における姿勢判定手段13−1は、作業内容に対応して発生する各作業者の姿勢を判定する。例えば姿勢判定手段13−1は、姿勢毎負荷テーブル15−2を参照し、作業を行う上で必要となる姿勢と同一の姿勢、又は近似する姿勢を特定し、特定した姿勢に対して予め設定されている負荷を取得する。姿勢としては、例えば「座る」、「腰を捻る」、「立つ」等の所定の動作、又は複数の動作の組み合わせ等であるが、これに限定されるものではない。
Specifically, the posture determination unit 13-1 in the
負荷算出手段13における部位毎負荷算出手段13−2は、作業中に生じる動作に対する作業者の体の部位毎の負荷を算出する。例えば、部位毎負荷算出手段13−2は、保持物毎負荷係数テーブル15−3を参照し、作業中に手にする物(例えば、道具や材料等)の形状、重さ(重量)、大きさ等に基づいて、対応する負荷係数を特定し、特定した負荷係数に基づいて部位毎の負荷を算出する。例えば、部位毎負荷算出手段13−2は、「床にある工具を机の上まで持ち上げる作業」が存在する場合、工具を持つ手等の部位毎の負荷を算出する。
The part-by-part load calculating unit 13-2 in the
負荷算出手段13における作業者毎負荷集計手段13−3は、上述した姿勢判定手段13−1や部位毎負荷算出手段13−2等により得られる負荷情報から作業者毎の負荷を集計する。集計された作業者毎の負荷(総負荷)は、作業者負荷テーブル15-4に記憶されてもよく、表示手段14の画面に表示されてもよい。
The load calculation unit 13-3 for each worker in the
本実施形態では、上述した構成により、実際に生産ラインを実際に動作させる前にシミュレーションを行い、例えば作業者の姿勢及び運搬する部品重量等から作業負荷を推定する。これにより、本実施形態では、例えば作業者毎の負荷を考慮した作業時間を均等化するための情報を表示したり記憶することができ、適切な工程計画の作成を支援することができる。 In the present embodiment, with the above-described configuration, a simulation is performed before the production line is actually operated, and the work load is estimated from, for example, the posture of the worker and the weight of parts to be transported. Thereby, in this embodiment, for example, information for equalizing work time considering the load for each worker can be displayed and stored, and creation of an appropriate process plan can be supported.
記憶手段15は、上述した作業テーブル15−1、姿勢毎負荷テーブル15−2、保持物毎負荷係数テーブル15−3、及び、作業者負荷テーブル15−4を記憶する。また、記憶手段15は、上述した各種テーブル以外にも、例えば各種設定情報や処理経過中の情報等を一時的に記憶する。
The memory | storage means 15 memorize | stores the work table 15-1, the load table 15-2 for every attitude | position, the load coefficient table 15-3 for every holding | maintenance thing, and the worker load table 15-4 mentioned above. In addition to the various tables described above, the
なお、上述した各種テーブルは、情報処理装置10内に設けられていなくてもよい。上述した各種テーブルは、例えばLocal Area Network(LAN)やインターネット等に代表される通信ネットワークを介して接続される外部装置(例えば、データベース)等に記憶されていてもよい。情報処理装置10は、必要に応じて通信ネットワークを介して上述した外部装置等にアクセスして必要な情報を読み出したり、書き込んだりすることができる。
The various tables described above may not be provided in the
上述した情報処理装置10は、例えばPersonal Computer(PC)やサーバ等であるが、これに限定されるものではなく、例えばタブレット端末等の通信端末であってもよい。
The
本実施形態は、上述した構成により、適切に作業負荷を推定することができる。また、本実施形態では、単純な作業時間の均等化ではなく、作業内容に対する重み付けを行うことで、各作業者の負荷を考慮した作業時間を均等化することができ、例えば複数の作業者の総負荷の偏りを減じた変更作業スケジュールを出力することができる。したがって、本実施形態では、適切な工程計画の作成を支援することができる。 In the present embodiment, the workload can be appropriately estimated by the above-described configuration. Further, in this embodiment, the work time considering the load of each worker can be equalized by weighting the work content instead of simply equalizing the work time. A change work schedule with reduced total load bias can be output. Therefore, in this embodiment, creation of an appropriate process plan can be supported.
<ハードウェア構成例>
上述した情報処理装置の各機能を実行させることができる実行プログラム(作業負荷推定プログラム)を例えば汎用のPC等にインストールすることにより、本実施形態における作業負荷推定処理を実現することができる。ここで、情報処理装置10における作業負荷推定処理が実現可能なコンピュータのハードウェア構成例について図を用いて説明する。
<Hardware configuration example>
By installing an execution program (workload estimation program) that can execute each function of the information processing apparatus described above, for example, on a general-purpose PC or the like, the workload estimation process in the present embodiment can be realized. Here, a hardware configuration example of a computer capable of realizing the workload estimation process in the
図2は、作業負荷推定処理が実現可能なハードウェア構成の一例を示す図である。図2におけるコンピュータ本体には、入力装置21と、出力装置22と、ドライブ装置23と、補助記憶装置24と、主記憶装置25と、各種制御を行うCentral Processing Unit(CPU)26と、ネットワーク接続装置27とを有し、これらはシステムバスBで相互に接続されている。
FIG. 2 is a diagram illustrating an example of a hardware configuration capable of realizing the workload estimation process. 2 includes an
入力装置21は、情報処理装置10の管理者(ユーザ)等が操作するキーボード及びマウス等のポインティングデバイスや、マイクロフォン等の音声入力デバイスを有する。入力装置21は、ユーザ等からのプログラムの実行指示、各種操作情報、ソフトウェア等を起動するための情報等の入力を受け付ける。
The
出力装置22は、本実施形態における処理を行うためのコンピュータ本体を操作するのに必要な各種ウィンドウやデータ等を表示するディスプレイを有し、CPU26が有する制御プログラムによりプログラムの実行経過や結果等を表示する。また、出力装置22は、上述の処理結果等を紙等の印刷媒体に印刷して、管理者等に提示する。
The
ここで、本実施形態においてコンピュータ本体にインストールされる実行プログラムは、例えば、Universal Serial Bus(USB)メモリやCD−ROM、DVD等の可搬型の記録媒体28等により提供される。プログラムを記録した記録媒体28は、ドライブ装置24にセット可能であり、CPU26からの制御信号に基づき、記録媒体28に含まれる実行プログラムが、記録媒体28からドライブ装置24を介して補助記憶装置24にインストールされる。
Here, the execution program installed in the computer main body in the present embodiment is provided by, for example, a universal recording bus 28 such as a Universal Serial Bus (USB) memory, a CD-ROM, or a DVD. The recording medium 28 on which the program is recorded can be set in the
補助記憶装置24は、例えばハードディスクドライブやSolid State Drive(SSD)等のストレージ手段等である。補助記憶装置24は、CPU26からの制御信号に基づき、本実施形態における実行プログラムや、コンピュータに設けられた制御プログラム等を記憶し、必要に応じて入出力を行う。補助記憶装置24は、CPU26からの制御信号等に基づいて、記憶された各情報から必要な情報を読み出したり、書き込むことができる。
The
主記憶装置25は、CPU26により補助記憶装置24から読み出された実行プログラム等を格納する。なお、主記憶装置25は、Read Only Memory(ROM)やRandom Access Memory(RAM)等である。なお、補助記憶装置24及び主記憶装置25は、例えば上述した記憶手段15に対応している。
The
CPU26は、オペレーティングシステム等の制御プログラム、及び主記憶装置25に格納されている実行プログラムに基づいて、各種演算や各ハードウェア構成部とのデータの入出力等、コンピュータ全体の処理を制御して各処理を実現することができる。プログラムの実行中に必要な各種情報等は、補助記憶装置24から取得することができ、また実行結果等を格納することもできる。
The
具体的には、CPU26は、例えば入力装置21から得られるプログラムの実行指示等に基づき、補助記憶装置24にインストールされた作業負荷推定プログラムを実行させることにより、主記憶装置25上でプログラムに対応する処理を行う。
Specifically, the
例えば、CPU26は、作業負荷推定プログラムを実行させることで、例えば、上述した入力手段11による所定の作業内容等の設定情報等の入力、作業作成手段12による作業テーブルの作成等の処理を行う。また、CPU26は、作業負荷推定プログラムを実行させることで、例えば、上述した負荷算出手段13における作業者毎の負荷の算出、表示手段14における作業者毎の負荷情報の表示や作業内容、各種テーブル等の表示を行う。なお、CPU26における処理内容は、これに限定されるものではない。
For example, the
ネットワーク接続装置27は、CPU26からの制御信号に基づき、通信ネットワーク等と接続することにより、実行プログラムやソフトウェア、設定情報等を、通信ネットワークに接続されている外部装置等から取得する。また、ネットワーク接続装置27は、プログラムを実行することで得られた実行結果又は本実施形態における実行プログラム自体を外部装置等に提供することができる。
The
上述したようなハードウェア構成により、本実施形態における作業負荷推定処理を実行することができる。また、プログラムをインストールすることにより、汎用のPCやサーバ等で本実施形態における作業負荷推定処理を容易に実現することができる。 With the hardware configuration described above, the workload estimation process in the present embodiment can be executed. Further, by installing the program, the workload estimation process in the present embodiment can be easily realized by a general-purpose PC or server.
<作業負荷推定処理例>
情報処理装置10における作業負荷推定処理の一例について、フローチャートを用いて説明する。図3は、作業負荷推定処理の一例を示すフローチャートである。
<Example of workload estimation processing>
An example of workload estimation processing in the
図3の例に示す作業負荷推定処理において、入力手段11は、管理者等のユーザから作業内容、作業者等の設定情報の入力を受け付ける(S01)。なお、設定情報は、予め設定されていてもよい。 In the workload estimation process shown in the example of FIG. 3, the input unit 11 accepts input of work content and setting information such as a worker from a user such as an administrator (S01). Note that the setting information may be set in advance.
次に、作業作成手段12は、S01の処理により入力された各種設定情報等から作業内容を所定の工程毎に分割し、分割した工程や期間等に応じて作業者毎の作業内容(作業テーブル)を作成する(S02)。
Next, the
次に、負荷算出手段13は、S02の処理により得られた作業テーブルを用いて、作業者毎の負荷を算出する(S03)。次に、負荷算出手段13は、S03の処理により得られる算出結果から、各作業者の作業内容を再設定するか否かを判断する(S04)。再設定するか否かの判断は、例えば作業者毎に算出された作業負荷の最大値と最小値との差が予め設定された閾値以上の場合に再設定を行うと判断することができるが、判断手法については、これに限定されるものではない。
Next, the load calculation means 13 calculates the load for each worker using the work table obtained by the process of S02 (S03). Next, the
負荷算出手段13は、再設定する場合(S04において、YES)、S01の処理で受け付けた各種設定情報や他の作業条件等に基づく作業の再設定を行い(S05)、S02の処理に戻る。なお、再設定は、入力手段11によりユーザが再度入力することで、設定情報を受け付けることができるが、これに限定されるものではない。S05の処理では、例えば作業負荷が大きい部分に対して負荷を所定数に分割したり作業者を割り当てる等の設定を自動で行ってもよい。これにより、作業作成手段12は、各作業者の作業負荷を含めた作業テーブルを作成することができる。
When resetting (YES in S04), the
また、負荷算出手段13は、作業内容を再設定しない場合(S04において、NO)、その結果を表示手段14の画面に出力したり、記憶手段15に記憶する(S05)。 Further, when the work content is not reset (NO in S04), the load calculation means 13 outputs the result to the screen of the display means 14 or stores it in the storage means 15 (S05).
<S03:作業負荷算出処理>
次に、上述したS03における作業負荷算出処理について、フローチャートを用いて具体的に説明する。図4は、作業負荷算出処理の一例を示すフローチャートである。図4の例に示す作業負荷算出処理において、負荷算出手段13は、所定の工程作業等に対して、所定時間間隔毎のユーザの動作に伴う姿勢や保持物等による負荷を算出するため、変数の一例である時間(Time)に初期値(0)を設定する(S11)。
<S03: Workload calculation processing>
Next, the workload calculation process in S03 described above will be specifically described using a flowchart. FIG. 4 is a flowchart illustrating an example of a workload calculation process. In the workload calculation process shown in the example of FIG. 4, the load calculation means 13 calculates a load caused by the user's action at every predetermined time interval or a load due to a holding object for a predetermined process operation or the like. An initial value (0) is set to time (Time), which is an example (S11).
次に、負荷算出手段13は、所定の作業に対する所定時間毎(Time時点)の作業者の姿勢を作業テーブル15−1から取得する(S12)。次に、負荷算出手段13は、姿勢毎負荷テーブル15−2を参照するため、変数の一例である姿勢識別情報(姿勢No)に初期値(1)を設定する(S13)。次に、負荷算出手段13は、姿勢毎負荷テーブル15−2から姿勢データを取得し(S14)、姿勢データと作業中のある時点(Time時点)の姿勢との近似率を取得する(S15)。近似率は、例えばお互いの姿勢データの各部位の座標位置を比較することで取得することができるが、これに限定されるものではない。お互いの姿勢データにおける各部位の座標位置が近いほど、近似率が高くなる。
Next, the load calculation means 13 acquires the posture of the worker for every predetermined time (Time point) for the predetermined work from the work table 15-1 (S12). Next, the load calculation means 13 sets an initial value (1) in posture identification information (posture No), which is an example of a variable, in order to refer to the posture-specific load table 15-2 (S13). Next, the
次に、負荷算出手段13は、ある時点(Time時点)の作業者の姿勢に対して、姿勢毎負荷テーブル15−2から得られる各姿勢データと比較し、その近似率が前姿勢より高いか否かを判断する(S16)。 Next, the load calculation means 13 compares the posture of the worker at a certain time (time) with each posture data obtained from the posture-specific load table 15-2, and whether the approximation rate is higher than the previous posture. It is determined whether or not (S16).
負荷算出手段13は、近似率が前姿勢より高い場合(S16において、YES)、姿勢毎負荷テーブル15−2からその姿勢データに基づく負荷を取得し、保持物毎負荷係数テーブル15−3からその時点での作業者の保持物に基づく負荷を取得する(S17)。次に、負荷算出手段13は、上述した姿勢データに基づく負荷と、保持物に基づく負荷とを用いて、その時点(Time時点)における負荷を算出する(S18)。
When the approximation rate is higher than the previous posture (YES in S16), the
また、負荷算出手段13は、近似度が前姿勢より高くない場合(S16において、NO)、又は、S18の処理後、姿勢毎負荷テーブル15−2に含まれる全姿勢について処理が終了したか否かを判断する(S19)。負荷算出手段13は、処理が終了していない場合(S19において、NO)、次の姿勢に対して近似計算を行うため、姿勢識別情報(姿勢No)を更新(+1)し(S20)、S14の処理に戻る。
Further, the
つまり、S14〜S20の処理では、作業テーブルから取得したTime時点における作業者の姿勢に対して、姿勢毎負荷テーブル15−2から最も近似する姿勢データ又は同一の姿勢データを取得する。また、その姿勢に設定された負荷情報と、Time時点における作業者の保持物に基づく負荷情報とを用いて負荷を算出する。したがって、S18の処理における最終的な算出結果は、最も近似する姿勢データ又は同一の姿勢データに基づく負荷と、その時点における作業者の保持物に基づく負荷とに基づいて算出された負荷となる。 That is, in the processes of S14 to S20, the posture data that is most approximated or the same posture data is acquired from the posture-specific load table 15-2 with respect to the posture of the worker at the time point acquired from the work table. Further, the load is calculated using the load information set in the posture and the load information based on the worker's holding at the time point. Therefore, the final calculation result in the process of S18 is a load calculated based on the most approximate posture data or the load based on the same posture data and the load based on the worker's holding at that time.
S19の処理において、負荷算出手段13は、全姿勢が終了した場合(S19において、YES)、S18の処理で得られた計算結果や姿勢ID等を作業者負荷テーブル15−4等に出力し、所定の作業に対する所定時間が終了したか否かを判断する(S21)。
In the process of S19, when all the postures are completed (YES in S19), the
負荷算出手段13は、所定時間が終了していない場合(S21において、NO)、次の時間において、同様の負荷算出の処理を行うため、時間(Time)を更新(+1)し(S22)、S12の処理に戻る。なお、図4の例では、1秒単位で作業者の姿勢や保持物等に対する負荷を算出しているが、これに限定されるものではなく、例えば3秒間隔や10秒間隔でもよい。また、負荷の算出は、工程に係る全ての時間に対して一定の間隔で処理してもよく、また例えば所定の動作(例えば、作業者の姿勢)の変化を検知したタイミングを基準に所定間隔で処理してもよい。 When the predetermined time has not expired (NO in S21), the load calculation means 13 updates (+1) the time (Time) to perform the same load calculation processing at the next time (S22), The process returns to S12. In the example of FIG. 4, the load on the worker's posture, the holding object, and the like is calculated in units of one second. However, the present invention is not limited to this. Further, the load calculation may be performed at regular intervals for all the times related to the process. For example, the load may be calculated based on the timing at which a change in a predetermined operation (for example, the posture of the worker) is detected. May be processed.
負荷算出手段13は、S21の処理において、所定時間が終了した場合(S21において、YES)、例えば作業者負荷テーブル15−4を参照して負荷合計を算出し(S23)、その結果を出力する(S24)。なお、結果の出力は、作業者負荷テーブル15−4に出力してもよく、表示手段14に表示してもよく、その両方でもよい。
When the predetermined time ends in the process of S21 (YES in S21), the
上述した図4の例に示す処理は、作業者毎に行われる。これにより、本実施形態は、作業者毎の姿勢や保持物に対する負荷を含めた作業負荷を算出することができる。なお、上述した処理では、作業者の姿勢に基づく負荷及び作業者が工程中に保持する保持物に基づく負荷を用いて負荷を算出したが、これに限定されるものではなく、何れか一方の負荷のみを用いてもよい。 The process shown in the example of FIG. 4 described above is performed for each worker. Thereby, this embodiment can calculate the work load including the attitude | position for every worker, and the load with respect to a holding | maintenance thing. In the above-described processing, the load is calculated using the load based on the posture of the worker and the load based on the holding object that the worker holds during the process. However, the present invention is not limited to this, and either one of them is calculated. Only the load may be used.
上述した作業負荷推定処理により、例えば他の作業者との負荷が均等になるように再設定を行うことができ、複数の作業者の総負荷の偏りを減じた変更作業スケジュールを出力することで、適切な工程計画の作成を支援することができる。 By the workload estimation process described above, for example, resetting can be performed so that the load with other workers is equal, and by outputting a changed work schedule that reduces the total load bias of multiple workers It is possible to support the creation of an appropriate process plan.
<各種テーブル例>
ここで、本実施形態における各種テーブル例について図を用いて説明する。
<Examples of various tables>
Here, various table examples in the present embodiment will be described with reference to the drawings.
<作業テーブル15−1>
図5は、作業テーブルの一例を示す図である。図5の例に示す作業テーブル15−1の項目としては、例えば「Time」、「頭位置(X,Y,Z)」、「右手位置(X,Y,Z)」、「右種別」、「右手加重」、「左手位置(X,Y,Z)」、「左種別」、「左手加重」、「腰位置(X,Y,Z)」、「右足位置(X,Y,Z)」、「左足位置(X,Y,Z)」等があるが、これに限定されるものではない。作業テーブル15−1の他の項目としては、例えば首や背中、指、手首、肘、膝等の体の他の部位(関節等を含む)等があるが、これに限定されるものではない。本実施形態では、作業者の体に対する少なくとも1つの部位を用いて作業テーブルを設定し、設定された部位に対して姿勢や保持物等による負荷情報を設定する。
<Work table 15-1>
FIG. 5 is a diagram illustrating an example of a work table. The items of the work table 15-1 shown in the example of FIG. 5 include, for example, “Time”, “head position (X, Y, Z)”, “right hand position (X, Y, Z)”, “right type”, “Right hand weight”, “Left hand position (X, Y, Z)”, “Left type”, “Left hand weight”, “Waist position (X, Y, Z)”, “Right foot position (X, Y, Z)” , “Left foot position (X, Y, Z)”, etc., but is not limited thereto. Other items of the work table 15-1 include, for example, other parts of the body (including joints) such as the neck, back, fingers, wrists, elbows, and knees, but are not limited thereto. . In this embodiment, a work table is set using at least one part with respect to the worker's body, and load information based on the posture, a holding object, and the like is set for the set part.
「Time」は、予め設定された工程作業の開始からの経過時間を示す。「頭位置(X,Y,Z)」は、作業者の頭の頂点又は重心の3次元座標を示す。「右手位置(X,Y,Z)」は、右手の重心の3次元座標を示す。「右種別」は、右手に保持している物を識別するための識別情報(保持物ID)を示す。「右手加重」は、保持物により右手に係る加重を示している。 “Time” indicates an elapsed time from the start of a preset process operation. “Head position (X, Y, Z)” indicates the three-dimensional coordinates of the vertex or the center of gravity of the operator's head. “Right-hand position (X, Y, Z)” indicates the three-dimensional coordinates of the center of gravity of the right hand. “Right type” indicates identification information (held object ID) for identifying an object held in the right hand. “Right hand weight” indicates the weight of the right hand by the holding object.
また同様に、「左手位置(X,Y,Z)」は左手の重心の3次元座標、「左種別」は左手に保持している物を識別するための識別情報(保持物ID)、「左手加重」は保持物により左手に係る加重を示している。「腰位置(X,Y,Z)」は、腰の重心の3次元座標を示す。「右足位置(X,Y,Z)」は、右足の重心の3次元座標を示す。「左足位置(X,Y,Z)」は、左足の重心の3次元座標を示す。 Similarly, “left hand position (X, Y, Z)” is the three-dimensional coordinate of the center of gravity of the left hand, “left type” is identification information (holding object ID) for identifying an object held in the left hand, “ “Left hand weight” indicates the weight of the left hand by the holding object. “Waist position (X, Y, Z)” indicates the three-dimensional coordinates of the center of gravity of the waist. “Right foot position (X, Y, Z)” indicates the three-dimensional coordinates of the center of gravity of the right foot. “Left foot position (X, Y, Z)” indicates the three-dimensional coordinates of the center of gravity of the left foot.
なお、上述した加重とは、例えば保持物の重量(g)に基づいて設定されるが、これに限定されるものではない。例えば、1000gの保持物を片手(例えば、右手)で保持した場合、保持した片手の加重は、1000.0となる。また、1000gの保持物を両手で保持した場合、保持した右手と左手の加重は、左右均等に分割させて500.0となる。 In addition, although the weight mentioned above is set based on the weight (g) of a holding | maintenance thing, for example, it is not limited to this. For example, when a 1000 g holding object is held with one hand (for example, the right hand), the weight of the held one hand is 1000.0. Further, when a 1000 g holding object is held with both hands, the weight of the held right hand and left hand is 500.0 by equally dividing the left and right hands.
ここで、図6は、座標の設定内容を説明するための図である。本実施形態では、図6(A)の例に示すように、工程の初期状態として、作業者30の頭31の位置をXY平面の中心(X,Y)=(0,0)とし、地面から頭頂部の位置を高さ(身長)をZとして設定している。ここで、例えば図6(B)に示すように、作業者30が初期状態から左に90度捻った場合や保持物を持った場合には、右手32や左手33等の位置等が移動する。したがって、本実施形態は、各作業の単位時間毎に頭31、右手32、左手32等の体の各部位の座標が作業テーブル15−1に記憶される。
Here, FIG. 6 is a diagram for explaining the setting contents of the coordinates. In the present embodiment, as shown in the example of FIG. 6A, as the initial state of the process, the position of the
ここで、図5では、ある作業者が、8秒間で行う作業の例を示している。具体的には、作業者は、作業開始時の初期状態(Time=0)から、前に屈み(Time=1)、左右の手でカバー(保持物ID=1)を保持し(Time=2)、カバーを保持したまま持ち上げて(Time=3)、正面にある机の上に置く(Time=4)。更に、作業者は、左側に体を90度捻り(Time=5)、右手に電動工具(保持物ID=3)、左手にボルト(保持物ID=2)を持ち(Time=6)、正面を向いて(Time=7)、ボルトを締める(Time=8)。なお、作業の種類や内容については、これに限定されるものではない。 Here, FIG. 5 shows an example of work performed by a certain worker in 8 seconds. Specifically, the worker bends forward (Time = 1) from the initial state at the start of work (Time = 0), and holds the cover (holding object ID = 1) with the left and right hands (Time = 2). ) While holding the cover, lift it (Time = 3) and place it on the desk in front (Time = 4). Further, the operator twists his body 90 degrees on the left side (Time = 5), holds the power tool (holding object ID = 3) on the right hand, and holds the bolt (holding object ID = 2) on the left hand (Time = 6). Facing (Time = 7) and tightening the bolt (Time = 8). Note that the type and contents of work are not limited to this.
このように、作業毎に作業テーブル15−1を作成して記憶しておき、この情報を用いて負荷の算出を行う。 Thus, the work table 15-1 is created and stored for each work, and the load is calculated using this information.
<姿勢毎負荷テーブル15−2>
図7は、姿勢毎負荷テーブルの一例を示す図である。姿勢毎負荷テーブル15−2は、作業者の姿勢と負荷との対応関係を示すデータである。図7に示す姿勢毎負荷テーブル15−2の項目としては、例えば姿勢を識別するための識別情報である「姿勢ID」、頭位置(X,Y,Z)」、「右手位置(X,Y,Z)」、「右手負荷率」、「左手位置(X,Y,Z)」、「左手負荷率」、「腰位置(X,Y,Z)」、「右足(X,Y,Z)」、「左足(X,Y,Z)」、・・・、「負荷率」等であるが、これに限定されるものではない。
<Load table for each posture 15-2>
FIG. 7 is a diagram illustrating an example of a load table for each posture. The posture-by-posture load table 15-2 is data indicating the correspondence between the posture of the worker and the load. The items in the posture-by-posture load table 15-2 shown in FIG. 7 include, for example, “posture ID” which is identification information for identifying the posture, head position (X, Y, Z), and “right hand position (X, Y). , Z) "," Right hand load factor "," Left hand position (X, Y, Z) "," Left hand load factor "," Waist position (X, Y, Z) "," Right foot (X, Y, Z) " ”,“ Left foot (X, Y, Z) ”,...,“ Load factor ”, etc., but are not limited thereto.
図7の例では、負荷情報の一例として、右手、左手毎の負荷率を設定しているが、これに限定されるものではなく、左右の足や腰等に対する負荷率を設定してもよい。また、図7の例では、負荷情報の一例として、姿勢IDに対応する全体の負荷率が設定されている。 In the example of FIG. 7, the load factor for each right hand and left hand is set as an example of the load information. However, the load factor is not limited to this, and the load factor for the left and right feet, the waist, etc. . In the example of FIG. 7, an overall load factor corresponding to the posture ID is set as an example of the load information.
図7に示す姿勢IDは、例えば上述した図4に示す姿勢Noに対応する。本実施形態では、姿勢IDに対応させて、例えば作業者の立つ、屈む、座る、捻る、歩く(移動する)等の予め設定された姿勢情報に基づいて、体の各部位の3次元座標と負荷率とを姿勢毎負荷テーブル15−2に設定する。 The posture ID shown in FIG. 7 corresponds to the posture No. shown in FIG. 4 described above, for example. In the present embodiment, the three-dimensional coordinates of each part of the body based on preset posture information corresponding to the posture ID, for example, such as the operator standing, bending, sitting, twisting, walking (moving), etc. The load factor is set in the per-posture load table 15-2.
なお、姿勢毎負荷テーブル15−2は、例えば少しずつ姿勢を変化させた姿勢データが連続して格納されていてもよい。例えば、姿勢毎負荷テーブル15−2は、最初は直立状態の姿勢から少しずつ座る姿勢になるまでの各段階の姿勢データが連続して格納される。これにより、例えば上述した図4に示すS16の処理において、作業テーブルから取得した作業者の姿勢に対して、前姿勢に対する近似率と、今回の姿勢に対する近似率とを比較することで、姿勢データが徐々に近似しているか否か等を判断することができる。 The posture load table 15-2 may continuously store posture data in which postures are changed little by little, for example. For example, the posture-by-posture load table 15-2 continuously stores the posture data of each stage from the posture in the upright state to the posture in which the seat is gradually seated. Accordingly, for example, in the process of S16 shown in FIG. 4 described above, the posture data is obtained by comparing the approximation rate with respect to the previous posture and the approximation rate with respect to the current posture with respect to the posture of the worker acquired from the work table. It is possible to determine whether or not is gradually approximating.
<保持物毎負荷係数テーブル15−3>
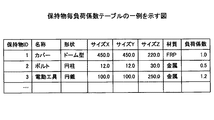
図8は、保持物毎負荷係数テーブルの一例を示す図である。保持物毎負荷係数テーブル15−3は、保持物と負荷との対応関係を示すデータである。図8に示す保持物テーブル15−3の項目としては、例えば作業者が保持する物体を識別するための識別情報である「保持物ID」、「形状」、「サイズ(X,Y,Z)」、「材質」、「負荷係数」等があるが、これに限定されるものではなく、例えば重さ等の情報を含んでいてもよい。
<Load coefficient table 15-3 for each holding>
FIG. 8 is a diagram illustrating an example of the load coefficient table for each holding object. The load factor table 15-3 for each holding object is data indicating the correspondence between the holding object and the load. The items in the holding object table 15-3 shown in FIG. 8 include, for example, “holding object ID”, “shape”, and “size (X, Y, Z), which are identification information for identifying an object held by the worker. ”,“ Material ”,“ load coefficient ”, etc., but is not limited to this, and information such as weight may be included.
形状には、例えば物体の大まかな形状(例えば、ドーム型、円柱、円錐等)が設定される。サイズには、例えば物体の大きさ(例えば、縦(X)、横(Y)、高さ(Z)等)が設定される。材質には、例えば物体の主要な材質(例えば、Fiber Reinforced Plastics(FRP)、金属等)が設定される。負荷係数は、上述した物体の形状や大きさ、材質に対応する負荷情報が設定される。なお、物体に対する負荷係数は、例えば図8に示す「形状」、「サイズ(X,Y,Z)」、及び「材質」のうち、少なくとも1つに対して負荷係数が設定されていればよい。 As the shape, for example, a rough shape of an object (for example, a dome shape, a cylinder, a cone, or the like) is set. For example, the size of an object (for example, vertical (X), horizontal (Y), height (Z), etc.) is set as the size. As the material, for example, the main material of the object (for example, Fiber Reinforced Plastics (FRP), metal, etc.) is set. As the load coefficient, load information corresponding to the shape, size, and material of the object described above is set. For example, the load coefficient for the object may be set to at least one of “shape”, “size (X, Y, Z)”, and “material” shown in FIG. .
保持物は、形状や大きさ、材質等によって持ち易さが異なるため、保持物毎に負荷係数を設定し、その負荷係数を用いて作業者の負荷を算出することで、作業者の作業負荷を適切に設定することができる。なお、保持物は、作業者の手に持つ物に限定されるものではなく、例えば手や頭、腰等に装着する物や、力を加えて移動させる物等も含む。 Since the holding objects have different ease of holding depending on the shape, size, material, etc., set the load coefficient for each holding object and calculate the worker's load using the load coefficient. Can be set appropriately. Note that the holding object is not limited to an object held in the hand of an operator, and includes, for example, an object to be worn on the hand, head, waist, or the like, or an object to be moved by applying force.
<作業者負荷テーブル15−4>
図9は、作業者負荷テーブルの一例を示す図である。図9に示す作業者負荷テーブル15−4の項目としては、例えば「Time」、「頭位置(X,Y,Z)」、「右手位置(X,Y,Z)」、「右種別」、「右手負荷」、「左手位置(X,Y,Z)」、「左種別」、「左手負荷」、「腰位置(X,Y,Z)」、「右足位置(X,Y,Z)」、「左足位置(X,Y,Z)」、「姿勢ID」、「全体負荷」等があるが、これに限定されるものではない。
<Worker load table 15-4>
FIG. 9 is a diagram illustrating an example of the worker load table. The items in the worker load table 15-4 shown in FIG. 9 include, for example, “Time”, “head position (X, Y, Z)”, “right hand position (X, Y, Z)”, “right type”, “Right hand load”, “Left hand position (X, Y, Z)”, “Left type”, “Left hand load”, “Waist position (X, Y, Z)”, “Right foot position (X, Y, Z)” , “Left foot position (X, Y, Z)”, “posture ID”, “overall load”, etc., but are not limited thereto.
作業者負荷テーブル15−4は、作業内容に対応する工程作業の所定時間間隔(例えば、1秒)毎に、作業者の体の各部位の姿勢(3次元座標)と、所定の部位(例えば、右手、左手)の負荷値、及び各部位全体の負荷値を記憶する。全体負荷は、負荷算出手段13により算出される。また、姿勢IDは、上述した姿勢毎負荷テーブル15−2から、その時点(Time時点)での作業時の姿勢に最も近似する姿勢データ又は同一の姿勢データのデータIDが記憶される。 The worker load table 15-4 includes the posture (three-dimensional coordinates) of each part of the worker's body and a predetermined part (for example, for each predetermined time interval (for example, one second) of the process work corresponding to the work content. , Right hand, left hand) and the load value of each part as a whole. The total load is calculated by the load calculation means 13. In addition, the posture ID stores the posture ID that is most approximate to the posture at the time of work (time point) or the data ID of the same posture data from the above-described posture-by-posture load table 15-2.
本実施形態では、作業者毎負荷集計手段13−3が、例えば図9に示すように所定時間間隔毎に得られた全体負荷値を集計することで、各工程に対する作業者毎の作業負荷(総負荷)を取得することができ、作業者毎の負担を適切に把握することができる。 In the present embodiment, the load calculation unit 13-3 for each worker adds up the total load values obtained at predetermined time intervals as shown in FIG. Total load) can be acquired, and the burden on each worker can be properly grasped.
<負荷取得の具体例>
次に、本実施形態における負荷取得の具体例について説明する。図10は、作業者の姿勢の一例を示す図である。また、図11は、負荷算出の具体例を示す図である。
<Specific examples of load acquisition>
Next, a specific example of load acquisition in the present embodiment will be described. FIG. 10 is a diagram illustrating an example of the posture of the worker. FIG. 11 is a diagram illustrating a specific example of load calculation.
本実施形態では、図10に示すように、入力手段11により設定された工程計画等に基づき、作業作成手段12により作成された作業内容に対して所定時間毎の作業者30の動作(姿勢)がシミュレーションされる。また、本実施形態では、負荷算出手段12によりその動作(姿勢)の変化や保持物の有無、形状等における負荷を取得し、作業者毎の適切な作業負荷を取得する。
In the present embodiment, as shown in FIG. 10, based on the process plan set by the input unit 11, the operation (posture) of the
例えば、本実施形態において、負荷算出手段13は、例えば図11に示すような姿勢A〜Cにおいて、それぞれ異なる負荷率を設定することができる。また、負荷算出手段13は、作業者の姿勢(体の各部位の3次元座標)に対応した負荷率を設定した上で、その姿勢で保持している物体(例えば、部品、荷物)の重量、負荷係数等を乗じることで、作業者の負荷を数値化する。
For example, in the present embodiment, the
図11の例では、作業者30に対して姿勢A(立位)の負荷率=1.0、姿勢B(中腰)の負荷率=1.4、姿勢C(捻り)の負荷率=1.2として設定されているが、負荷率の設定についてはこれに限定されるものではない。 In the example of FIG. 11, the load factor of posture A (standing position) = 1.0, the load factor of posture B (middle waist) = 1.4, and the load factor of posture C (twist) = 1. Although it is set as 2, the setting of the load factor is not limited to this.
また、本実施形態では、工程上、作業者が保持する保持物40に対する負荷を設定する。例えば、保持物40が部品Aである場合には、部品Aに対する重量や負荷係数を用いて負荷を算出する。負荷係数とは、上述したように、例えば形状、サイズ、及び材質のうち、少なくとも1つに対して負荷係数が設定されていればよい。図11の例では、部品Aの材質がプラスチックの場合には負荷係数を1.0としたり、形状が工具の場合には負荷係数を1.5としているが、これに限定されるものではない。 Moreover, in this embodiment, the load with respect to the holding | maintenance 40 which an operator hold | maintains is set on a process. For example, when the holding object 40 is the part A, the load is calculated using the weight and the load coefficient for the part A. As described above, the load coefficient may be set to at least one of the shape, size, and material, for example. In the example of FIG. 11, when the material of the part A is plastic, the load coefficient is 1.0, and when the shape is a tool, the load coefficient is 1.5. However, the present invention is not limited to this. .
つまり、負荷算出手段13は、作業者の姿勢毎に負荷率を設定し、また作業者が工程上必要な保持物の重量や負荷係数を設定して、作業者の作業をシミュレーションしたときの作業負荷を算出する。この場合、負荷算出手段13は、例えば図11に示すように、「負荷=作業者の姿勢に基づく負荷率×重量×保持物に基づく負荷係数」として計算することができるが、これに限定されるものではない。例えば、上述した保持物毎負荷係数テーブル15−3に重量も含めた負荷係数が設定されている場合には、作業者の姿勢に対応する負荷率と負荷係数とを乗算すればよい。
In other words, the load calculating means 13 sets the load factor for each posture of the worker, and sets the weight of the holding material and the load coefficient necessary for the process to simulate the work of the worker. Calculate the load. In this case, as shown in FIG. 11, for example, the
また、負荷算出手段13は、単位時間に保持する各保持物に対して計算した負荷を合計して部品毎の組み付け負荷を算出し、更に工程の1サイクル毎の負荷を合計して作業者毎の負荷を取得する。取得した作業負荷に基づいて、作業作成手段12は、他の作業者と負荷が均等になるように組み付け部品の再割り当てを行ったり、工程又は担当作業を分割して作業者への再割り当て等を行うことができる。このように、本実施形態では、適切に作業者毎の作業負荷を推定することができ、推定された作業負荷から適切な工程計画の作成を支援することができる。 Further, the load calculation means 13 calculates the assembly load for each part by totaling the loads calculated for each holding object held per unit time, and further totals the load for each cycle of the process for each worker. Get the load. Based on the acquired work load, the work creation means 12 reassigns the assembled parts so that the load is equal to other workers, or reassigns the process or assigned work to the worker. It can be performed. Thus, in this embodiment, the workload for each worker can be estimated appropriately, and creation of an appropriate process plan can be supported from the estimated workload.
上述した処理では、作業者の姿勢及び作業者が工程中に保持する保持物に対応する負荷を用いて負荷を取得したが、これに限定されるものではなく、何れか一方の負荷のみを用いてもよい。また、上述した負荷の算出については、上述した内容に限定されるものではなく、例えば荷物を保持したときの各部位(筋肉)にかかる力を基準に負荷を算出してもよい。なお、筋力は、作業者の性別や年齢等により異なる。そのため、本実施形態では、例えば上述した性別や年齢等の作業者情報と、作業者情報に対応する負荷を設定しておき、設定した負荷を用いて、作業者毎の作業負荷をより適切に算出することもできる。 In the processing described above, the load is acquired using the load corresponding to the posture of the worker and the holding object held by the worker during the process, but the present invention is not limited to this, and only one of the loads is used. May be. Further, the calculation of the load described above is not limited to the above-described content, and for example, the load may be calculated based on the force applied to each part (muscle) when holding the load. Note that the muscle strength varies depending on the sex and age of the worker. For this reason, in this embodiment, for example, the worker information such as gender and age described above and the load corresponding to the worker information are set, and the workload for each worker is more appropriately set using the set load. It can also be calculated.
上述したように、本実施形態では、適切に作業負荷を推定することができる。具体的には、実際に生産ラインを動かす前にシミュレーションを行い、作業者の姿勢及び運搬する保持物等から作業負荷を推定することで、作業者毎の負荷(例えば、疲労の原因等)を数値化することができる。したがって、本実施形態は、数値化された負荷を基準に作業時間を均等化するための工程計画を作成することができる。また、本実施形態は、単純な時間で均等化することなく、作業者毎の負荷を考慮した作業時間で工程を均等化するため、休憩時間や作業者交代等のスケジューリングを適切に計画することができる。したがって、本実施形態では、適切な工程計画の作成を支援することができる。 As described above, in this embodiment, the work load can be estimated appropriately. Specifically, a simulation is performed before actually moving the production line, and the work load (for example, the cause of fatigue) is estimated for each worker by estimating the work load from the posture of the worker and the holding material to be transported. Can be quantified. Therefore, this embodiment can create a process plan for equalizing work time on the basis of a digitized load. In addition, according to the present embodiment, in order to equalize the process with the work time considering the load for each worker without equalizing with a simple time, scheduling such as break time and worker change is appropriately planned. Can do. Therefore, in this embodiment, creation of an appropriate process plan can be supported.
以上、各実施例について詳述したが、特定の実施例に限定されるものではなく、特許請求の範囲に記載された範囲内において、上記変形例以外にも種々の変形及び変更が可能である。 Each embodiment has been described in detail above. However, the present invention is not limited to the specific embodiment, and various modifications and changes other than the above-described modification are possible within the scope described in the claims. .
なお、以上の実施例に関し、更に以下の付記を開示する。
(付記1)
作業に応じた作業者の姿勢の時間的な変化を示すデータ又は作業に応じた作業者の保持物を示すデータを取得し、
作業者の姿勢と負荷との対応関係を示すデータ又は保持物と負荷との対応関係を示すデータを参照して、取得した該データに含まれる作業者の各姿勢に対応する負荷又は取得した該データに含まれる作業者の保持物に対応する負荷を特定し、
特定した前記負荷を集計して、前記作業における前記作業者の総負荷を算出する、
処理をコンピュータに実行させる作業負荷推定プロラム。
(付記2)
作業者の姿勢の時間的な変化又は作業者の保持物の情報を含む、複数の作業者のそれぞれの作業スケジュールデータを取得し、
作業者の姿勢と負荷との対応関係を示すデータ又は保持物と負荷との対応関係を示すデータを参照して、取得した該作業スケジュールデータに含まれる作業者の各姿勢に対応する負荷又は取得した該データに含まれる作業者の保持物に対応する負荷を特定し、
特定した前記負荷を集計して、前記複数の作業者のそれぞれについて、対応する作業スケジュールに応じた作業者の総負荷を算出し、
算出した前記複数の作業者の総負荷に基づいて、前記複数の作業者のうちの少なくとも一人の作業者についての作業スケジュールを変更して、前記複数の作業者の総負荷の偏りを減じた変更作業スケジュールを出力する、
処理をコンピュータに実行させる作業負荷推定プロラム。
(付記3)
前記姿勢に対応する負荷は、前記作業者の少なくとも1つの部位の位置座標に対応させた負荷であることを特徴とする付記1又は2に記載の作業負荷推定プログラム。
(付記4)
前記保持物に対応する負荷は、前記保持物の形状、サイズ、及び材質のうち、少なくとも1つに対応させた負荷であることを特徴とする付記1乃至3の何れか1項に記載の作
(付記5)
前記姿勢に対応する負荷の特定は、
前記作業者の姿勢と負荷との対応関係を示すデータから、前記作業者の姿勢に最も近似した姿勢に対する負荷を用いて特定することを特徴とする付記1乃至4の何れか1項に記載の作業負荷推定プログラム。
(付記6)
前記姿勢に対応する負荷と前記保持物に対応する負荷とを乗算して負荷を算出することを特徴とする付記1乃至5の何れか1項に記載の作業負荷推定プログラム。
(付記7)
情報処理装置が、
作業に応じた作業者の姿勢の時間的な変化を示すデータ又は作業に応じた作業者の保持物を示すデータを取得し、
作業者の姿勢と負荷との対応関係を示すデータ又は保持物と負荷との対応関係を示すデータを参照して、取得した該データに含まれる作業者の各姿勢に対応する負荷又は取得した該データに含まれる作業者の保持物に対応する負荷を特定し、
特定した前記負荷を集計して、前記作業における前記作業者の総負荷を算出することを特徴とする作業負荷推定方法。
(付記8)
情報処理装置が、
作業者の姿勢の時間的な変化又は作業者の保持物の情報を含む、複数の作業者のそれぞれの作業スケジュールデータを取得し、
作業者の姿勢と負荷との対応関係を示すデータ又は保持物と負荷との対応関係を示すデータを参照して、取得した該作業スケジュールデータに含まれる作業者の各姿勢に対応する負荷又は取得した該データに含まれる作業者の保持物に対応する負荷を特定し、
特定した前記負荷を集計して、前記複数の作業者のそれぞれについて、対応する作業スケジュールに応じた作業者の総負荷を算出し、
算出した前記複数の作業者の総負荷に基づいて、前記複数の作業者のうちの少なくとも一人の作業者についての作業スケジュールを変更して、前記複数の作業者の総負荷の偏りを減じた変更作業スケジュールを出力することを特徴とする作業負荷推定方法。
(付記9)
作業に応じた作業者の姿勢の時間的な変化を示すデータ又は作業に応じた作業者の保持物を示すデータを取得し、作業者の姿勢と負荷との対応関係を示すデータ又は保持物と負荷との対応関係を示すデータを記憶する記憶手段と、
前記記憶手段を参照して、取得した該データに含まれる作業者の各姿勢に対応する負荷又は取得した該データに含まれる作業者の保持物に対応する負荷を特定し、特定した前記負荷を集計して、前記作業における前記作業者の総負荷を算出する負荷算出手段とを有することを特徴とする情報処理装置。
(付記10)
作業者の姿勢の時間的な変化又は作業者の保持物の情報を含む、複数の作業者のそれぞれの作業スケジュールデータを作業作成手段と、
作業者の姿勢と負荷との対応関係を示すデータ又は保持物と負荷との対応関係を示すデータを記憶する記憶手段と、
前記記憶手段を参照して、前記作業作成手段により取得した該作業スケジュールデータに含まれる作業者の各姿勢に対応する負荷又は取得した該データに含まれる作業者の保持物に対応する負荷を特定し、特定した前記負荷を集計して、前記複数の作業者のそれぞれについて、対応する作業スケジュールに応じた作業者の総負荷を算出する負荷算出手段とを有し、
前記作業作成手段は、前記負荷算出手段により算出した前記複数の作業者の総負荷に基づいて、前記複数の作業者のうちの少なくとも一人の作業者についての作業スケジュールを変更して、前記複数の作業者の総負荷の偏りを減じた変更作業スケジュールを出力することを特徴とする情報処理装置。
In addition, the following additional remarks are disclosed regarding the above Example.
(Appendix 1)
Acquire data indicating the temporal change in the posture of the worker according to the work or data indicating the work held by the worker according to the work,
The load corresponding to each posture of the worker included in the acquired data or the acquired the data with reference to the data indicating the correspondence relationship between the posture of the worker and the load or the data indicating the correspondence relationship between the holding object and the load Identify the load corresponding to the worker's holdings included in the data,
Aggregating the identified loads to calculate the total load of the worker in the work,
A workload estimation program that causes a computer to execute processing.
(Appendix 2)
Acquiring work schedule data for each of a plurality of workers, including information on the temporal changes in worker attitudes or the information held by workers,
The load or acquisition corresponding to each posture of the worker included in the acquired work schedule data with reference to the data indicating the correspondence relationship between the posture of the worker and the load or the data indicating the correspondence relationship between the holding object and the load Identifying the load corresponding to the worker's holdings contained in the data,
Summing up the identified loads, for each of the plurality of workers, calculating the total load of the workers according to the corresponding work schedule,
Based on the calculated total load of the plurality of workers, the work schedule for at least one of the plurality of workers is changed, and the change that reduces the total load bias of the plurality of workers Output work schedule,
A workload estimation program that causes a computer to execute processing.
(Appendix 3)
The workload estimation program according to
(Appendix 4)
The load according to any one of
The load corresponding to the posture is specified as follows:
5. The data according to any one of
(Appendix 6)
6. The work load estimation program according to any one of
(Appendix 7)
Information processing device
Acquire data indicating the temporal change in the posture of the worker according to the work or data indicating the work held by the worker according to the work,
The load corresponding to each posture of the worker included in the acquired data or the acquired the data with reference to the data indicating the correspondence relationship between the posture of the worker and the load or the data indicating the correspondence relationship between the holding and the load Identify the load corresponding to the worker's holdings included in the data,
A work load estimation method, comprising: summing up the specified loads and calculating a total load of the worker in the work.
(Appendix 8)
Information processing device
Acquiring work schedule data for each of a plurality of workers, including information on the temporal changes in worker attitudes or the information held by workers,
The load or acquisition corresponding to each posture of the worker included in the acquired work schedule data with reference to the data indicating the correspondence relationship between the posture of the worker and the load or the data indicating the correspondence relationship between the holding object and the load Identifying the load corresponding to the worker's holdings contained in the data,
Summing up the identified loads, for each of the plurality of workers, calculating the total load of the workers according to the corresponding work schedule,
Based on the calculated total load of the plurality of workers, the work schedule for at least one of the plurality of workers is changed, and the change that reduces the total load bias of the plurality of workers A workload estimation method characterized by outputting a work schedule.
(Appendix 9)
Data indicating the temporal change in the posture of the worker according to the work or data indicating the worker's holdings according to the work, and data or holdings indicating the correspondence between the posture of the worker and the load Storage means for storing data indicating a correspondence relationship with the load;
Referring to the storage means, specify a load corresponding to each posture of the worker included in the acquired data or a load corresponding to a worker's holding included in the acquired data, and the specified load An information processing apparatus comprising: a load calculating unit that calculates and calculates a total load of the worker in the work.
(Appendix 10)
Work creation means for each work schedule data of a plurality of workers, including information on the temporal change of workers' posture or the work held by workers,
Storage means for storing data indicating the correspondence relationship between the posture of the worker and the load or data indicating the correspondence relationship between the holding object and the load;
Referring to the storage means, the load corresponding to each posture of the worker included in the work schedule data acquired by the work creation means or the load corresponding to the worker's holdings included in the acquired data is specified. And a load calculating means for calculating the total load of the worker according to the corresponding work schedule for each of the plurality of workers by totalizing the identified loads.
The work creation means changes a work schedule for at least one worker among the plurality of workers based on the total load of the plurality of workers calculated by the load calculation means, and An information processing apparatus that outputs a change work schedule in which a bias of a worker's total load is reduced.
10 情報処理装置
11 入力手段
12 作業作成手段
13 負荷算出手段
14 表示部
15 記憶手段
21 入力装置
22 出力装置
23 ドライブ装置
24 補助記憶装置
25 主記憶装置
26 CPU
27 ネットワーク接続装置
28 記録媒体
30 作業者
31 頭
32 右手
33 左手
40 保持物
DESCRIPTION OF
27 Network connection device 28
Claims (9)
作業者の姿勢と負荷との対応関係を示すデータ又は保持物と負荷との対応関係を示すデータを参照して、取得した該データに含まれる作業者の各姿勢に対応する負荷又は取得した該データに含まれる作業者の保持物に対応する負荷を特定し、
特定した前記負荷を集計して、前記作業における前記作業者の総負荷を算出する、
処理をコンピュータに実行させる作業負荷推定プロラム。 Acquire data indicating the temporal change in the posture of the worker according to the work or data indicating the work held by the worker according to the work,
The load corresponding to each posture of the worker included in the acquired data or the acquired the data with reference to the data indicating the correspondence relationship between the posture of the worker and the load or the data indicating the correspondence relationship between the holding object and the load Identify the load corresponding to the worker's holdings included in the data,
Aggregating the identified loads to calculate the total load of the worker in the work,
A workload estimation program that causes a computer to execute processing.
作業者の姿勢と負荷との対応関係を示すデータ又は保持物と負荷との対応関係を示すデータを参照して、取得した該作業スケジュールデータに含まれる作業者の各姿勢に対応する負荷又は取得した該データに含まれる作業者の保持物に対応する負荷を特定し、
特定した前記負荷を集計して、前記複数の作業者のそれぞれについて、対応する作業スケジュールに応じた作業者の総負荷を算出し、
算出した前記複数の作業者の総負荷に基づいて、前記複数の作業者のうちの少なくとも一人の作業者についての作業スケジュールを変更して、前記複数の作業者の総負荷の偏りを減じた変更作業スケジュールを出力する、
処理をコンピュータに実行させる作業負荷推定プロラム。 Acquiring work schedule data for each of a plurality of workers, including information on the temporal changes in worker attitudes or the information held by workers,
The load or acquisition corresponding to each posture of the worker included in the acquired work schedule data with reference to the data indicating the correspondence relationship between the posture of the worker and the load or the data indicating the correspondence relationship between the holding object and the load Identifying the load corresponding to the worker's holdings contained in the data,
Summing up the identified loads, for each of the plurality of workers, calculating the total load of the workers according to the corresponding work schedule,
Based on the calculated total load of the plurality of workers, the work schedule for at least one of the plurality of workers is changed, and the change that reduces the total load bias of the plurality of workers Output work schedule,
A workload estimation program that causes a computer to execute processing.
前記作業者の姿勢と負荷との対応関係を示すデータから、前記作業者の姿勢に最も近似した姿勢に対する負荷を用いて特定することを特徴とする請求項1乃至4の何れか1項に記載の作業負荷推定プログラム。 The load corresponding to the posture is specified as follows:
5. The method according to claim 1, wherein the identification is performed from data indicating a correspondence relationship between the posture of the worker and a load using a load with respect to a posture that is closest to the posture of the worker. Workload estimation program.
作業に応じた作業者の姿勢の時間的な変化を示すデータ又は作業に応じた作業者の保持物を示すデータを取得し、
作業者の姿勢と負荷との対応関係を示すデータ又は保持物と負荷との対応関係を示すデータを参照して、取得した該データに含まれる作業者の各姿勢に対応する負荷又は取得した該データに含まれる作業者の保持物に対応する負荷を特定し、
特定した前記負荷を集計して、前記作業における前記作業者の総負荷を算出することを特徴とする作業負荷推定方法。 Information processing device
Acquire data indicating the temporal change in the posture of the worker according to the work or data indicating the work held by the worker according to the work,
The load corresponding to each posture of the worker included in the acquired data or the acquired the data with reference to the data indicating the correspondence relationship between the posture of the worker and the load or the data indicating the correspondence relationship between the holding object and the load Identify the load corresponding to the worker's holdings included in the data,
A work load estimation method, comprising: summing up the specified loads and calculating a total load of the worker in the work.
作業者の姿勢の時間的な変化又は作業者の保持物の情報を含む、複数の作業者のそれぞれの作業スケジュールデータを取得し、
作業者の姿勢と負荷との対応関係を示すデータ又は保持物と負荷との対応関係を示すデータを参照して、取得した該作業スケジュールデータに含まれる作業者の各姿勢に対応する負荷又は取得した該データに含まれる作業者の保持物に対応する負荷を特定し、
特定した前記負荷を集計して、前記複数の作業者のそれぞれについて、対応する作業スケジュールに応じた作業者の総負荷を算出し、
算出した前記複数の作業者の総負荷に基づいて、前記複数の作業者のうちの少なくとも一人の作業者についての作業スケジュールを変更して、前記複数の作業者の総負荷の偏りを減じた変更作業スケジュールを出力することを特徴とする作業負荷推定方法。 Information processing device
Acquiring work schedule data for each of a plurality of workers, including information on the temporal changes in worker attitudes or the information held by workers,
The load or acquisition corresponding to each posture of the worker included in the acquired work schedule data with reference to the data indicating the correspondence relationship between the posture of the worker and the load or the data indicating the correspondence relationship between the holding object and the load Identifying the load corresponding to the worker's holdings contained in the data,
Summing up the identified loads, for each of the plurality of workers, calculating the total load of the workers according to the corresponding work schedule,
Based on the calculated total load of the plurality of workers, the work schedule for at least one of the plurality of workers is changed, and the change that reduces the total load bias of the plurality of workers A workload estimation method characterized by outputting a work schedule.
前記記憶手段を参照して、取得した該データに含まれる作業者の各姿勢に対応する負荷又は取得した該データに含まれる作業者の保持物に対応する負荷を特定し、特定した前記負荷を集計して、前記作業における前記作業者の総負荷を算出する負荷算出手段とを有することを特徴とする情報処理装置。 Data indicating the temporal change in the posture of the worker according to the work or data indicating the worker's holdings according to the work, and data or holdings indicating the correspondence between the posture of the worker and the load Storage means for storing data indicating a correspondence relationship with the load;
Referring to the storage means, specify a load corresponding to each posture of the worker included in the acquired data or a load corresponding to a worker's holding included in the acquired data, and the specified load An information processing apparatus comprising: a load calculating unit that calculates and calculates a total load of the worker in the work.
作業者の姿勢と負荷との対応関係を示すデータ又は保持物と負荷との対応関係を示すデータを記憶する記憶手段と、
前記記憶手段を参照して、前記作業作成手段により取得した該作業スケジュールデータに含まれる作業者の各姿勢に対応する負荷又は取得した該データに含まれる作業者の保持物に対応する負荷を特定し、特定した前記負荷を集計して、前記複数の作業者のそれぞれについて、対応する作業スケジュールに応じた作業者の総負荷を算出する負荷算出手段とを有し、
前記作業作成手段は、前記負荷算出手段により算出した前記複数の作業者の総負荷に基づいて、前記複数の作業者のうちの少なくとも一人の作業者についての作業スケジュールを変更して、前記複数の作業者の総負荷の偏りを減じた変更作業スケジュールを出力することを特徴とする情報処理装置。 Work creation means for each work schedule data of a plurality of workers, including information on the temporal change of workers' posture or the work held by workers,
Storage means for storing data indicating the correspondence relationship between the posture of the worker and the load or data indicating the correspondence relationship between the holding object and the load;
Referring to the storage means, the load corresponding to each posture of the worker included in the work schedule data acquired by the work creation means or the load corresponding to the worker's holdings included in the acquired data is specified. And a load calculating means for calculating the total load of the worker according to the corresponding work schedule for each of the plurality of workers by totalizing the identified loads.
The work creation means changes a work schedule for at least one worker among the plurality of workers based on the total load of the plurality of workers calculated by the load calculation means, and An information processing apparatus that outputs a change work schedule in which a bias of a worker's total load is reduced.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013075026A JP2014199595A (en) | 2013-03-29 | 2013-03-29 | Work load estimation program, work load estimation method and information processing device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013075026A JP2014199595A (en) | 2013-03-29 | 2013-03-29 | Work load estimation program, work load estimation method and information processing device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2014199595A true JP2014199595A (en) | 2014-10-23 |
Family
ID=52356438
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013075026A Pending JP2014199595A (en) | 2013-03-29 | 2013-03-29 | Work load estimation program, work load estimation method and information processing device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2014199595A (en) |
Cited By (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2017039018A1 (en) * | 2015-09-03 | 2017-03-09 | 株式会社ニコン | Work management device, work management method, and work management program |
| JP2017068429A (en) * | 2015-09-29 | 2017-04-06 | 富士重工業株式会社 | Workload evaluation device, workload evaluation method |
| JP2017068430A (en) * | 2015-09-29 | 2017-04-06 | 富士重工業株式会社 | Adaptability evaluation device, and adaptability evaluation method |
| JP2017068428A (en) * | 2015-09-29 | 2017-04-06 | 富士重工業株式会社 | Workload evaluation device, workload evaluation method |
| JP6226049B1 (en) * | 2016-09-07 | 2017-11-08 | オムロン株式会社 | Control device, system, control method and program |
| KR20180125159A (en) * | 2016-04-26 | 2018-11-22 | 미쓰비시덴키 가부시키가이샤 | Worker management device |
| WO2020217381A1 (en) * | 2019-04-25 | 2020-10-29 | 三菱電機株式会社 | Work assistance device and work assistance system |
| JP2021002078A (en) * | 2019-06-19 | 2021-01-07 | 大和ハウス工業株式会社 | Evaluation system for work supporting device |
| JP2021021973A (en) * | 2019-07-24 | 2021-02-18 | 日本電気株式会社 | Weight estimation device, weight estimation method, and weight estimation program |
| JP2022048014A (en) * | 2020-09-14 | 2022-03-25 | 株式会社東芝 | Load estimation device, method, and program |
| JP7401069B1 (en) | 2023-06-20 | 2023-12-19 | 株式会社ゼスト | Operating status aggregation system, operating status aggregation method and program |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6130365A (en) * | 1984-07-18 | 1986-02-12 | Toyota Motor Corp | Control of physical distribution |
| JP2004139515A (en) * | 2002-10-21 | 2004-05-13 | Honda Motor Co Ltd | Method for evaluating process of production line |
-
2013
- 2013-03-29 JP JP2013075026A patent/JP2014199595A/en active Pending
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6130365A (en) * | 1984-07-18 | 1986-02-12 | Toyota Motor Corp | Control of physical distribution |
| JP2004139515A (en) * | 2002-10-21 | 2004-05-13 | Honda Motor Co Ltd | Method for evaluating process of production line |
Cited By (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPWO2017039018A1 (en) * | 2015-09-03 | 2018-06-21 | 株式会社ニコン | Work management apparatus, work management method, and work management program |
| WO2017039018A1 (en) * | 2015-09-03 | 2017-03-09 | 株式会社ニコン | Work management device, work management method, and work management program |
| JP2017068429A (en) * | 2015-09-29 | 2017-04-06 | 富士重工業株式会社 | Workload evaluation device, workload evaluation method |
| JP2017068430A (en) * | 2015-09-29 | 2017-04-06 | 富士重工業株式会社 | Adaptability evaluation device, and adaptability evaluation method |
| JP2017068428A (en) * | 2015-09-29 | 2017-04-06 | 富士重工業株式会社 | Workload evaluation device, workload evaluation method |
| KR102206712B1 (en) * | 2016-04-26 | 2021-01-22 | 미쓰비시덴키 가부시키가이샤 | Worker management device |
| KR20180125159A (en) * | 2016-04-26 | 2018-11-22 | 미쓰비시덴키 가부시키가이샤 | Worker management device |
| WO2018047592A1 (en) * | 2016-09-07 | 2018-03-15 | オムロン株式会社 | Control device, system, control method, and program |
| US11137747B2 (en) | 2016-09-07 | 2021-10-05 | Omron Corporation | Control system for a production line drive unit |
| JP2018039076A (en) * | 2016-09-07 | 2018-03-15 | オムロン株式会社 | Control apparatus, system, controlling method and program |
| CN108136592A (en) * | 2016-09-07 | 2018-06-08 | 欧姆龙株式会社 | Control device, system, control method and program |
| CN108136592B (en) * | 2016-09-07 | 2022-06-24 | 欧姆龙株式会社 | Control device, control system, control method, and computer-readable storage medium |
| JP6226049B1 (en) * | 2016-09-07 | 2017-11-08 | オムロン株式会社 | Control device, system, control method and program |
| US11803795B2 (en) | 2019-04-25 | 2023-10-31 | Mitsubishi Electric Corporation | Work assist device |
| JPWO2020217381A1 (en) * | 2019-04-25 | 2021-10-28 | 三菱電機株式会社 | Work support device |
| JP7086280B2 (en) | 2019-04-25 | 2022-06-17 | 三菱電機株式会社 | Work support device |
| WO2020217381A1 (en) * | 2019-04-25 | 2020-10-29 | 三菱電機株式会社 | Work assistance device and work assistance system |
| JP2021002078A (en) * | 2019-06-19 | 2021-01-07 | 大和ハウス工業株式会社 | Evaluation system for work supporting device |
| JP7373308B2 (en) | 2019-06-19 | 2023-11-02 | 大和ハウス工業株式会社 | Evaluation system for work aid equipment |
| JP2021021973A (en) * | 2019-07-24 | 2021-02-18 | 日本電気株式会社 | Weight estimation device, weight estimation method, and weight estimation program |
| JP7342489B2 (en) | 2019-07-24 | 2023-09-12 | 日本電気株式会社 | Weight estimation device, weight estimation method, and weight estimation program |
| JP2022048014A (en) * | 2020-09-14 | 2022-03-25 | 株式会社東芝 | Load estimation device, method, and program |
| JP7414676B2 (en) | 2020-09-14 | 2024-01-16 | 株式会社東芝 | Load estimating device, method and program |
| JP7401069B1 (en) | 2023-06-20 | 2023-12-19 | 株式会社ゼスト | Operating status aggregation system, operating status aggregation method and program |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2014199595A (en) | Work load estimation program, work load estimation method and information processing device | |
| Maurice et al. | Human-oriented design of collaborative robots | |
| Peruzzini et al. | A comparative study on computer-integrated set-ups to design human-centred manufacturing systems | |
| KR102068197B1 (en) | Methods and system for predicting hand positions for multi-hand phages of industrial objects | |
| US10679228B2 (en) | Systems, devices, and methods for predicting product performance in a retail display area | |
| Vosniakos et al. | On immersive virtual environments for assessing human-driven assembly of large mechanical parts | |
| Gonen et al. | Computer‐Aided Ergonomic Analysis for Assembly Unit of an Agricultural Device | |
| Turk et al. | Simulation-based time evaluation of basic manual assembly tasks | |
| Lockett et al. | An automated maintainability prediction tool integrated with computer aided design | |
| Aromaa et al. | Digital human models in human factors and ergonomics evaluation of gesture interfaces | |
| Wang et al. | 3D standard motion time-based ergonomic risk analysis for workplace design in modular construction | |
| Iriondo Pascual et al. | Implementation of ergonomics evaluation methods in a multi-objective optimization framework | |
| JP2014191643A (en) | Evaluation support program, evaluation support device, and evaluation support method | |
| US20230177437A1 (en) | Systems and methods for determining an ergonomic risk assessment score and indicator | |
| Goos et al. | Computer assisted ergonomic assembly cell design | |
| US6963827B1 (en) | System and method for performing discrete simulation of ergonomic movements | |
| Udosen | Ergonomic workplace construction, evaluation and improvement by CADWORK | |
| JP7352143B2 (en) | Skill information acquisition device and method | |
| Arzi | Methods engineering: using rapid prototype and virtual reality techniques | |
| Kumar et al. | Analysis and ergonomic improvement of working postures in cast house work station using JACK modelling | |
| Annisa | Analysis of the Working Position of Sandal Operator Using RULA and REBA Approach at Sisman Corporation (SISCO) | |
| Yan et al. | GA based algorithm for staff scheduling considering learning-forgetting effect | |
| Zülch | Evaluating human work in the digital factory-A new German guideline | |
| Lušetić et al. | Ergonomic design of workplace | |
| Johnson et al. | The limitations of using only CAD and DHM in design relating to high value manufacturing |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20151204 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20161026 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20161108 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20161228 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170530 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20170714 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20170815 |