JP2014002744A - イベントベースイメージ処理装置及びその装置を用いた方法 - Google Patents
イベントベースイメージ処理装置及びその装置を用いた方法 Download PDFInfo
- Publication number
- JP2014002744A JP2014002744A JP2013127816A JP2013127816A JP2014002744A JP 2014002744 A JP2014002744 A JP 2014002744A JP 2013127816 A JP2013127816 A JP 2013127816A JP 2013127816 A JP2013127816 A JP 2013127816A JP 2014002744 A JP2014002744 A JP 2014002744A
- Authority
- JP
- Japan
- Prior art keywords
- event
- pixel
- light flow
- velocity
- pixels
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N23/00—Cameras or camera modules comprising electronic image sensors; Control thereof
- H04N23/80—Camera processing pipelines; Components thereof
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N25/00—Circuitry of solid-state image sensors [SSIS]; Control thereof
- H04N25/40—Extracting pixel data from image sensors by controlling scanning circuits, e.g. by modifying the number of pixels sampled or to be sampled
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/20—Analysis of motion
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/20—Analysis of motion
- G06T7/269—Analysis of motion using gradient-based methods
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10016—Video; Image sequence
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Signal Processing (AREA)
- Image Analysis (AREA)
- Studio Devices (AREA)
- Testing, Inspecting, Measuring Of Stereoscopic Televisions And Televisions (AREA)
Abstract
【課題】イメージに含まれた複数のピクセルそれぞれで非同期的にイベント情報を生成するイベントベースイメージセンサを用いて光流を生成し、その際、光流生成のためにイメージ情報をアップデートする時間を短縮し、必要な演算時間又はメモリ空間を著しく削減できるイベントベースイメージ処理装置を提供する。
【解決手段】複数のイメージピクセルそれぞれで予め決定されたイベントが発生したか否かを検出してイベント信号を出力するセンサ、出力されたイベント信号に対応する少なくとも1つのピクセルとイベント信号が出力された時間をマッピングさせることによってタイムスタンプ情報を生成するタイムスタンプ部及び出力されたイベント信号に反応してタイムスタンプ情報に基づいて光流を生成する光流生成部を含む。
【選択図】 図1
【解決手段】複数のイメージピクセルそれぞれで予め決定されたイベントが発生したか否かを検出してイベント信号を出力するセンサ、出力されたイベント信号に対応する少なくとも1つのピクセルとイベント信号が出力された時間をマッピングさせることによってタイムスタンプ情報を生成するタイムスタンプ部及び出力されたイベント信号に反応してタイムスタンプ情報に基づいて光流を生成する光流生成部を含む。
【選択図】 図1
Description
下記の実施形態はイベントベース(event−based)イメージ処理装置及びその装置を用いた方法に関する。
イメージプロセシング(image processing)は、幅広くは入出力が映像である全ての形態の情報処理を示し、例えば、写真や動画を処理する作業などを含む。大部分の映像処理方式は画像を2次元信号と見なし、標準的な信号処理方式を適用する方法を用いる。
イメージセンサは、イメージプロセシングのための入力データをセンシングする装置として、例えば、半導体素子の製造技術を用いて集積回路化された光電変換素子などを含む。
イメージセンサには、ファクシミリやコピー機に用いられるラインイメージセンサ(1次元イメージセンサ)とテレビカメラやデジタルカメラに用いられるアレイイメージセンサ(2次元イメージセンサ)がある。
ラインイメージセンサは、光を検出して電荷を発生させる光ダイオードを一列に配置したものである。ラインイメージセンサは面積を有する領域の静止(still)画面を取得するために、対象物(文書や写真)をセンサラインと直角方向にスキャンする。
アレイイメージセンサは光ダイオードを2次元に配列したものであり、一回に画面全体のイメージを取得できるので、ビデオのような動画向けに用いられる。
本発明の目的は、イメージに含まれた複数のピクセルそれぞれで非同期的にイベント情報を生成するイベントベースイメージセンサを用いて光流を生成する技術を提供することにある。
また、本発明の目的は、光流生成のためにイメージ情報をアップデートする時間を短縮する技術を提供することにある。
それだけでなく、本発明の目的は、光流を生成するために必要な演算時間又はメモリ空間を削減できる技術を提供することにある。
本発明の一側面に係るイベントベースイメージ処理装置は、複数のイメージピクセルそれぞれで予め決定されたイベントが発生したか否かを検出し、前記検出に反応してイベント信号を出力するセンサと、前記イベント信号に対応する少なくとも1つのピクセルと前記イベント信号が出力された時間をマッピングさせることによってタイムスタンプ情報を生成するタイムスタンプ部と、前記イベント信号の出力に反応して前記タイムスタンプ情報に基づいて光流を生成する光流生成部と、を備える。
このとき、前記センサは、前記複数のイメージピクセルのうち、前記予め決定されたイベントが発生した一部のピクセルそれぞれに対応するイベント信号を非同期的に出力してもよい。
また、前記光流は、前記少なくとも1つのピクセルの速度ベクトルを含んでもよい。
ここで、前記光流生成部は、前記イベント信号の出力に反応して、前記複数のイメージピクセルのうち前記少なくとも1つのピクセル及び前記少なくとも1つのピクセルに隣接する周辺ピクセルそれぞれの速度ベクトルを非同期的に算出する部分算出部と、予め決定された周期ごとに、前記複数のイメージピクセルの速度ベクトルを算出する全体算出部の少なくとも1つを含んでもよい。
ここで、前記光流生成部は、前記イベント信号の出力に反応して、前記複数のイメージピクセルのうち前記少なくとも1つのピクセル及び前記少なくとも1つのピクセルに隣接する周辺ピクセルそれぞれの速度ベクトルを非同期的に算出する部分算出部と、予め決定された周期ごとに、前記複数のイメージピクセルの速度ベクトルを算出する全体算出部の少なくとも1つを含んでもよい。
また、前記光流生成部は、前記少なくとも1つのピクセルの周辺ピクセルを取得する周辺ピクセル取得部と、前記タイムスタンプ情報を用いて前記少なくとも1つのピクセルと前記周辺ピクセルとの間の時間差に関連する情報を算出する時間差算出部と、前記少なくとも1つのピクセルと前記周辺ピクセルとの間の距離差に関連する情報を算出する距離差算出部と、前記時間差に関連する情報と前記距離差に関連する情報に基づいて前記光流を算出する光流算出部とを備えてもよい。
また、前記時間差算出部は、前記少なくとも1つのピクセルと前記周辺ピクセルとの間の時間差が予め決定されたウィンドウ範囲外にある場合、前記時間差に関連する情報を0と算出してもよい。
また、前記距離差に関連する情報は、前記少なくとも1つのピクセルと前記周辺ピクセルとの間のピクセル距離の逆数を含んでもよい。
また、前記光流算出部は、前記光流を算出するために前記時間差に関連する情報と前記距離差に関連する情報を用いて前記少なくとも1つのピクセルに対応する2次元ベクトルAを算出し、前記2次元ベクトルAを前記2次元ベクトルA自身の内積値に割り算してもよい。
また、前記イベントベースイメージ処理装置は、前記光流に基づいてユーザインタフェースのための情報を算出する演算部をさらに備えてもよい。
また、前記ユーザインタフェースのための情報は、前記センサが位置するセンサ平面と平行する平面で前記複数のイメージピクセルに含まれた物体がx軸方向に動く第1速度と、前記平行する平面で前記物体がy軸方向に動く第2速度と、前記物体が前記平行する平面と垂直方向に動く第3速度と、前記平行する平面で前記物体が円形に回転する第4速度の少なくとも1つを含んでもよい。
また、前記演算部は、前記光流に基づいて前記第1速度及び前記第2速度を算出する平面速度演算部と、前記光流に基づいて前記光流の中心を算出する光流中心演算部と、前記光流と前記光流の中心に基づいて前記第3速度を算出するZ軸速度演算部と、前記光流と前記光流の中心に基づいて前記第4速度を算出する角速度演算部とを備えてもよい。
また、前記平面速度演算部は、前記第1速度及び前記第2速度を算出するために前記光流に対して平均値演算を行ってもよい。
また、前記光流中心演算部は、前記光流の中心を算出するために前記少なくとも1つのピクセルの位置と前記光流に含まれる前記少なくとも1つのピクセルの速度ベクトルの大きさを用いて重さの重心演算を行ってもよい。
また、前記Z軸速度演算部は、前記第3速度を算出するために前記光流の中心と前記少なくとも1つのピクセルの位置を用いて前記少なくとも1つのピクセルに対応する第1ベクトルを生成し、前記第1ベクトルと前記光流に含まれる前記少なくとも1つのピクセルの速度ベクトルを用いて内積演算を行ってもよい。
また、前記角速度演算部は、前記第4速度を算出するために前記光流の中心と前記少なくとも1つのピクセルの位置を用いて前記少なくとも1つのピクセルに対応する第1ベクトルを生成し、前記第1ベクトルと前記光流に含まれる前記少なくとも1つのピクセルの速度ベクトルを用いて外積演算を行ってもよい。
また、前記タイムスタンプ情報は、前記複数のイメージピクセルそれぞれで前記予め決定されたイベントが最近発生した時間に関連する情報を含んでもよい。
また、前記予め決定されたイベントは、単位時間に予め決定された数値以上に明るくなる場合発生するイベントと、前記単位時間に前記予め決定された数値以上に暗くなる場合発生するイベントと、の少なくとも1つを含んでもよい。
本発明の他の一実施形態に係るイベントベースイメージ処理方法は、複数のイメージピクセルそれぞれで予め決定されたイベントが発生したか否かを検出するセンサからイベント信号を受信するステップと、前記イベント信号の受信に反応して前記イベント信号に対応する少なくとも1つのピクセルと前記イベント信号が出力された時間をマッピングさせることによってタイムスタンプ情報を生成するステップと、前記タイムスタンプ情報に基づいて前記少なくとも1つのピクセルの速度ベクトルを含む光流を生成するステップとを含む。
ここで、前記光流を生成するステップは、前記少なくとも1つのピクセルの周辺ピクセルを取得するステップと、前記タイムスタンプ情報を用いて前記少なくとも1つのピクセルと前記周辺ピクセルとの間の時間差に関連する情報を算出するステップと、前記タイムスタンプ情報を用いて前記少なくとも1つのピクセルと前記周辺ピクセルとの間の距離差に関連する情報を算出するステップと、前記時間差に関連する情報と前記距離差に関連する情報に基づいて前記光流を算出するステップとを含んでもよい。
また、イベントベースイメージ処理方法は、前記光流に基づいてユーザインタフェースのための情報を演算するステップをさらに含み、前記ユーザインタフェースのための情報は、前記センサが位置するセンサ平面と平行する平面で前記複数のイメージピクセルに含まれた物体がx軸方向に動く第1速度と、前記平行する平面で前記物体がy軸方向に動く第2速度と、前記物体が前記平行する平面と垂直方向に動く第3速度と、前記平行する平面で前記物体が円形に回転する第4速度の少なくとも1つを含んでもよい。
前記演算するステップは、前記光流に基づいて前記第1速度及び前記第2速度を算出するステップと、前記光流に基づいて前記光流の中心を算出するステップと、前記光流と前記光流の中心に基づいて前記第3速度を算出するステップと、前記光流と前記光流の中心に基づいて前記第4速度を算出するステップとを含んでもよい。
本発明の実施形態によると、複数のイメージピクセルそれぞれで予め決定されたイベントが発生したか否かを検出するので、イメージに含まれた複数のピクセルそれぞれで非同期的にイベント情報を生成するイベントベースイメージセンサを用いて光流を生成する技術を提供できる。
本発明によると、光流生成のためにイメージ情報をアップデートする時間を短縮する技術を提供できる。
本発明によると、光流を生成するために必要な演算時間又はメモリ空間を削減する技術を提供できる。
以下、実施形態を添付する図面を参照しながら詳細に説明する。
図1は、一実施形態に係るイベントベースイメージ処理装置を示すブロック図である。
図1を参照すると、一実施形態に係るイベントベースイメージ処理装置100は、センサ110、タイムスタンプ部120及び光流生成部130を備える。
センサ110は、時間の流れに応じてイメージデータを連続的に入力される。ここで、センサ110は、入力されたイメージデータに含まれた複数のイメージピクセルそれぞれで予め決定されたイベントが発生したか否かを検出する。以下、単数のピクセル又は複数のピクセルは、それぞれ単数のイメージピクセル又は複数のイメージピクセルを含む。
ここで、予め決定されたイベントは、単位時間に予め決定された数値以上に明るくなる場合に発生するイベント(以下、「明るくなるイベント」と称する)、又は単位時間に予め決定された数値以上に暗くなる場合に発生するイベント(以下、「暗くなるイベント」と称する)のうち少なくとも1つを含む。
例えば、センサ110は、連続的に入力されるイメージデータに含まれた複数のピクセルそれぞれで各ピクセルの明度に関連するイベントが発生したか否かを検出する。
これによって、イベントベースイメージ処理装置100は、予め決定されたイベント(例えば、各ピクセルの明度に関連するイベント)が発生したピクセルのみを対象にイメージプロセシングすることによって、フレームごとに全てのピクセルに対してイメージプロセシングを行う方式に比べて演算量を大幅減少させ得る。
さらに、センサ110は、予め決定されたイベントの発生を検出した場合、これに反応してイベント信号を出力する。ここで、イベント信号は、予め決定されたイベントに基づいた非同期的な信号であり、予め決定されたイベントが発生した少なくとも1つのピクセルに関連する情報を含む。
センサ110は、複数のイメージピクセルのうち予め決定されたイベントが発生した一部のピクセルに限って当該ピクセルそれぞれに対応するイベント信号を非同期的に出力する。
例えば、(3,10)位置の第1ピクセルと(20,20)位置の第2ピクセルが予め決定された数値以上に明るくなったことを検出した場合、センサ110は、第1ピクセルの位置と第2ピクセルの位置を含むイベント信号を出力する。
また、タイムスタンプ部120は、センサ110から出力されたイベント信号を受信する。
タイムスタンプ部120は、イベント信号に対応する少なくとも1つのピクセルとイベント信号が出力された時間をマッピングさせることによって、タイムスタンプ(time stamp)情報を生成する。
より具体的には、タイムスタンプ部120は、受信されたイベント信号に含まれた情報(例えば、予め決定されたイベントが発生した少なくとも1つのピクセルに関連する情報)を用いて該当するピクセルに新しいイベントが発生した時間を格納する。
例えば、タイムスタンプ部120は、受信されたイベント信号に基づいて複数のピクセルそれぞれに新しいイベントが発生した時間を格納する。
従って、タイムスタンプ部120によって生成されるタイムスタンプ情報は、複数のピクセルそれぞれで予め決定されたイベントが最近発生した時間に関連する情報を含んでもよい。
一実施形態によれば、タイムスタンプ部120は、複数のピクセルそれぞれで予め決定されたイベントが最近発生した時間に関連する情報のみを保持する。例えば、タイムスタンプ部120は、受信されたイベント信号に含まれた情報(例えば、予め決定されたイベントが発生した少なくとも1つのピクセルに関連する情報)に基づいて、該当するピクセルに既に格納されていた時間を新しいイベントが発生した時間に更新してもよい。
一実施形態に係るタイムスタンプ部120は、ソフトウェア、ハードウェア、又は、ソフトウェアとハードウェアの組合で実現されてもよい。例えば、タイムスタンプ部120は、プロセッサ、メモリ、ハードウェア加速器(Hardware Accelerator、HWA)、FPGA、又はその組合などで実現されてもよい。
従って、一実施形態に係るイベントベースイメージ処理装置100は、時間の流れに応じて発生したイベントのヒストリーを考慮せず、各ピクセルで最後に発生したイベントに関連する情報のみを用いてイメージプロセシングを行う。これによって、イベントベースイメージ処理装置100は少ないメモリや演算量をもってイメージプロセシングを行う技術を提供できる。
タイムスタンプ部120によって生成されるタイムスタンプ情報に関連する詳細な事項は図2(a)及び図2(b)を参照して後述する。
また、光流生成部130は、センサ110から出力されるイベント信号に反応してタイムスタンプ部120によって生成されるタイムスタンプ情報に基づいて光流(optical flow)を生成する。
一実施形態に係る光流生成部130は、ソフトウェア、ハードウェア、又は、ソフトウェアとハードウェアの組合わせで実現される。例えば、光流生成部130は、プロセッサ、メモリ、ハードウェア加速器(Hardware Accelerator、HWA)、FPGA、又は、その組合わせなどで実現される。
ここで、光流は、新しいイベントが発生した少なくとも1つのピクセルの速度ベクトルを含む。例えば、光流は、複数のピクセルのうち予め決定されたイベントが発生した少なくとも1つのピクセルの速度ベクトルを含む。
ここで、それぞれの速度ベクトルは、複数のピクセルで構成される2次元平面上で特定の方向と特定の大きさを有する2次元ベクトルであり、それぞれの速度ベクトルの開始位置は該当するピクセルの位置である。
例えば、カメラを用いて時間的に連続した映像を取得する時、物体に対してカメラの位置を移動するか、又はカメラに対して物体が移動すれば、イメージ内の各ピクセルの明るさが変化するが、光流はこのようなイメージ内の明暗の移動を2次元ベクトルの形態で含む。
光流生成部120の構造及び光流生成部120がタイムスタンプ情報から光流を生成する動作に関する詳細な事項は図3を参照して後述する。
図2(a)及び図2(b)は、一実施形態に係るタイムスタンプ情報を説明するための図である。
図2(a)を参照すると、一実施形態に係るタイムスタンプ情報200は、複数のイメージピクセルそれぞれに対応する時間情報を格納する。
図1を参照して上述したように、タイムスタンプ情報200は、各ピクセルで予め決定されたイベントが最近発生した時間に関連する情報のみを保持する。
例えば、(i、j)位置のピクセル210で予め決定されたイベントが最近発生した時間はT(i、j)であり、(i、j+1)位置のピクセル220で予め決定されたイベントが最近発生した時間はT(i、j+1)である。
図1に示すタイムスタンプ部120は、センサ110から送信されたイベント信号に基づいてタイムスタンプ情報200をアップデートする。この場合、タイムスタンプ部120は、全てのピクセルに対しアップデートを行うことなく、予め決定されたイベントが発生したピクセルについてのみアップデートを行う。
一実施形態に係るセンサ110は、マイクロ秒(μs)単位で予め決定されたイベントが発生したか否かを検出する。この場合、タイムスタンプ部120は、マイクロ秒(μs)単位で新しいイベントが発生した時間をピクセルごとに格納する。
図2(b)を参照すると、一実施形態に係るイベントベースイメージ処理装置は、光流を生成するためにタイムスタンプ情報を用いて少なくとも1つのピクセルの速度ベクトルを算出する。
例えば、(i、j)位置のピクセル210で予め決定されたイベントが発生した後、(i+1、j+1)位置のピクセル230で予め決定されたイベントが発生した場合を仮定する。この場合、(i、j)位置のピクセル210は時間T(i、j)を格納し、(i+1、j+1)位置のピクセル230はT(i、j)よりも大きい数値を有する時間T(i+1、j+1)を格納する。
ここで、イベントベースイメージ処理装置は、タイムスタンプ情報200を用いてピクセル210の位置で開始点を有する2次元ベクトル
 (図示せず)を算出する。
(図示せず)を算出する。
より具体的には、イベントベースイメージ処理装置は、タイムスタンプ情報200から2次元ベクトル (図示せず)を算出するための時間差及び位置差を抽出する。ここで、時間差は、時間T(i+1、j+1)と時間T(i、j)間の時間差であって、スカラー量 Δt (図示せず)で表わされる。また、位置差異はピクセル230とピクセル210との間の位置差であって、2次元ベクトル
240で表わされる。
イベントベースイメージ処理装置は、数式(1)を用いて2次元ベクトル
(図示せず)を算出する。
(以下、簡略のため、ベクトル「A」、及び後出のベクトル「B」、「V」、「p(P)」などは、文字の上のベクトル矢印「→」を省いて、これを単に「A」、「B」、「V」、「p(P)」とも表現する。)
(以下、簡略のため、ベクトル「A」、及び後出のベクトル「B」、「V」、「p(P)」などは、文字の上のベクトル矢印「→」を省いて、これを単に「A」、「B」、「V」、「p(P)」とも表現する。)
さらに、イベントベースイメージ処理装置は、前述した方式と同様に、他のピクセルの位置に開始点を有する2次元ベクトルAを算出する。イベントベースイメージ処理装置は、このような2次元ベクトルのセットを含む光流を出力する。
図3は、一実施形態に係るイベントベースイメージ処理装置に含まれた光流生成部を示すブロック図である。
図3を参照すると、一実施形態に係る光流生成部300は、周辺ピクセル取得部310、時間差算出部320、距離差算出部330及び光流算出部340を備える。
図3に示されたモジュールそれぞれは、ソフトウェア、ハードウェア、又はソフトウェアとハードウェアの組合わせで実現され得る。例えば、光流生成部300は、周辺ピクセル取得部310、時間差算出部320、距離差算出部330及び光流算出部340それぞれは、プロセッサ、メモリ、ハードウェア加速器(Hardware Accelerator、HWA)、FPGA、又は、この組合わせなどで実現される。
周辺ピクセル取得部310は、予め決定されたイベントが発生されたピクセルを中心に複数の周辺ピクセルを取得する。
例えば、周辺ピクセル取得部310は、予め決定されたイベントが発生したピクセルと直接的に隣接する8個の周辺ピクセルを取得する。他の実施形態によれば、周辺ピクセル取得部310は、予め決定されたイベントが発生したピクセルと直接的に隣接する8個の周辺ピクセルだけではなく、8個の周辺ピクセルを取り囲む16個の周辺ピクセルをさらに取得する。
また、時間差算出部320は、図2(a)、(b)に示すタイムスタンプ情報200を用いて予め決定されたイベントが発生した少なくとも1つのピクセルとその周辺ピクセルとの間の時間差に関連する情報を算出する。
より具体的には、時間差算出部320は、新しいイベントが発生したピクセルとその周辺ピクセルとの間の時間差を算出する。例えば、図2(a)、(b)に示すピクセル210で新しいイベントが発生した場合を仮定する。時間差算出部320は、ピクセル210に格納された時間T(i、j)と周辺ピクセル220に格納された時間T(i、j+1)の差を算出する。
この場合、ピクセル210に格納された時間T(i、j)は新しいイベントの発生に反応して図1に示すタイムスタンプ部120によって値が更新された状態であるため、T(i、j)−T(i、j+1)は0よりも大きいか同じ値になる(ピクセル220でも同時にイベントが発生した場合、T(i、j)−T(i、j+1)が0になる)。
時間差算出部320は、周辺ピクセル取得部310によって取得された複数の周辺ピクセルそれぞれで前述した時間差を算出する。
さらに、時間差算出部320は、算出された時間差が予め決定されたウィンドウ範囲(例えば、0.1秒)外にある場合、算出された時間差の代わりに0を出力する。
言い換えれば、時間差算出部320は、算出された時間差が予め決定されたウィンドウ範囲(例えば、0.1秒)外にある場合、算出された時間差を無意味な情報として取り扱ってもよい。
これによって、光流生成部300は、光流に含まれる各ピクセルの速度ベクトルにノイズとして作用する要素を除去する。
また、距離差算出部330は、予め決定されたイベントが発生した少なくとも1つのピクセルとその周辺ピクセルとの間の距離差に関連する情報を算出する。
より具体的には、距離差算出部330は、新しいイベントが発生したピクセルとその周辺ピクセルとの間のピクセル距離の逆数を算出する。ここで、ピクセル距離は、複数のイメージピクセル間の一般化された距離(隣接ピクセル間の距離を1として基準化された距離)である。例えば、図2(a)に示すピクセル210とピクセル220との間のピクセル距離は1である。
距離差算出部330は、周辺ピクセル取得部310によって取得された複数の周辺ピクセルそれぞれで前述したピクセル距離の逆数を算出する。
また、光流算出部340は、時間差算出部320によって算出された時間差に関連する情報と距離差算出部330によって算出された距離差に関連する情報に基づいて光流を算出する。
より具体的には、光流算出部340は光流を算出するため、時間差に関連する情報と距離差に関連する情報を用いて予め決定されたイベントが発生した少なくとも1つのピクセルに対応する2次元ベクトルAを算出し、2次元ベクトルAを2次元ベクトルA自身の内積値で割り算する。
例えば、光流算出部340は、予め決定されたイベントが発生したピクセルの周辺ピクセルそれぞれに対応する時間差に関連する情報と距離差に関連する情報とを乗算する。続いて、光流算出部340は、周辺ピクセルにそれぞれ対応する乗算結果を合計して2次元ベクトルBを算出する。
ここで、2次元ベクトルBの次元は「時間/距離」となる。
ここで、2次元ベクトルBの次元は「時間/距離」となる。
光流算出部340は、2次元ベクトルAを2次元ベクトルA自身の内積値で割ることによって光流に含まれる速度ベクトルVを算出する。ここで、速度ベクトルVの次元は「距離/時間」となる。
光流算出部340は、予め決定されたイベントが発生したピクセルそれぞれで前述した速度ベクトルVを算出することで、ピクセルそれぞれの速度ベクトルを含む光流を生成する。
上述したように、時間差算出部320は、イベントが発生したピクセルとその周辺ピクセルとの間の時間差が予め決定されたウィンドウ範囲外にある場合0を出力する。もし、イベントが発生したピクセルとその周辺ピクセルの全ての時間差が予め決定されたウィンドウ範囲外にある場合、光流算出部340で算出される2次元ベクトルAは0となる。
この場合、光流算出部340は、速度ベクトルVの値として算出される無限大の代わりに0を出力する。
図示していないが、光流生成部300は、部分算出部及び全体算出部のうち少なくとも1つを含んでもよい。
ここで、部分算出部はイベント信号の出力に反応し、全体イメージピクセルのうちイベント信号が出力された一部のピクセル及びその周辺ピクセルに限って非同期的に光流を新しく算出する。例えば、部分算出部は、全体イメージピクセルのうち、イベント信号に対応する少なくとも1つのピクセル及び当該ピクセルに隣接する周辺ピクセルに係わる速度ベクトルを算出する。
また、全体算出部は、予め決定された周期ごとに全体イメージピクセルに対して光流を新しく算出する。例えば、全体算出部は、予め決定された周期が経過したか否かを判断し、予め決定された周期が経過した場合に全体イメージピクセルに係わる速度ベクトルを一括的に算出する。
部分算出部及び全体算出部には、図3を参照して記述された事項がそのまま適用されることから詳細な説明は省略する。
図4は、一実施形態に係る光流生成部によって生成された光流を説明するための図である。
例えば、円筒形の中心部の周辺に位置する8個の棒が同じ速力を有して反時計回りに回転すると仮定する。この場合、一実施形態に係るイベントベースイメージ処理装置は、8個の棒の回転運動による光流を生成する。
より具体的には、グラフ410を参照すると、図1に示すセンサ110は、円筒形の中心部周辺に位置する8個の棒が反時計回りに回転する場合に明るくなるイベントを検出してイベント信号を出力する。言い換えれば、センサ110は、反時計回りに回転する8個の棒によってイメージ内の複数のピクセルの明暗が予め決定された数値以上に明るくなることを検出し、イベント信号を出力する。
光流生成部は、図3を参照して上述したように、該当のピクセル(明暗が予め決定された数値以上に明るくなったピクセル)それぞれに対応する速度ベクトルVを算出する。
グラフ420は、2次元ベクトルである速度ベクトルVからx軸成分のみを抽出した結果を説明するための図である。
より具体的には、グラフ420は、該当のピクセル(明暗が予め決定された数値以上に明るくなったピクセル)それぞれのx軸速度ベクトルVxの大きさを明るさにより表示したグラフである。
例えば、8個の棒が反時計回りに回転している場合、下方に位置する棒421のVxが最も大きい値を有する。従って、棒421が最も明るく表示される。
また、グラフ430は、2次元ベクトルの速度ベクトルVからy軸成分のみを抽出した結果を説明するための図である。
より具体的には、グラフ430は、該当するピクセル(例えば、明暗が予め決定された数値以上に明るくなったピクセル)それぞれのy軸速度ベクトルVyの大きさを明るさにより表示したグラフである。
例えば、8個の棒が反時計回りに回転している場合、右側に位置する棒431のVyが最も大きい値を有する。従って、棒431が最も明るく表示される。
図5(a)は、一実施形態に係るイベントベースイメージ処理装置に含まれた演算部を示すブロック図である。
図5(a)を参照すると、一実施形態に係るイベントベースイメージ処理装置は演算部500をさらに備える。
演算部500は、光流生成部によって生成された光流に基づいてユーザインタフェースのための情報を演算する。
図5(b)を参照すると、ユーザインタフェースのための情報は、センサ551が位置するセンサ平面550と平行する平面560で複数のイメージピクセルに含まれた物体がx軸方向562に動く第1速度Vx、平行する平面560で物体がy軸方向561に動く第2速度Vy、物体が平行する平面560と垂直方向563に動く第3速度Vz、又は平行する平面560で物体が反時計回り564に回転する第4速度wのうち少なくとも1つを含む。
他の実施形態に係る演算部500は、物体は移動することなくカメラが動く場合にもユーザインタフェースのための情報を生成する。この場合、当該分野で通常の技術を有する者であれば、前述の事項から簡単な演算(例えば、結果値の符号を変更する演算)を介して物体は移動することなくカメラが動く場合のユーザインタフェースのための情報を生成するよう実施形態を変形できるであろう。
ここで図5(a)を参照すると、、演算部500は、平面速度演算部510、光流中心演算部520、Z軸速度演算部530及び角速度演算部540を備える。
平面速度演算部510は、光流に基づいて第1速度Vxと第2速度Vyを算出する。より具体的には、平面速度演算部510は、第1速度Vxと第2速度Vyを算出するために、光流に対して平均値演算を行う。
上述したように、光流は、予め決定されたイベントが発生した少なくとも1つのピクセルに係わる速度ベクトルを含む。平面速度演算部510は、該、少なくとも1つのピクセルに係わる速度ベクトルを含む全てのピクセルに係わる速度ベクトルの和を算出することで光流に対して平均値演算を行う。
ここで、少なくとも1つのピクセルの速度ベクトルそれぞれは2次元ベクトルであるので、光流の平均も2次元ベクトルである。平面速度演算部510は、算出された光流の平均からx軸成分とy軸成分を分離することによって、第1速度Vxと第2速度Vyを算出する。
また、光流中心演算部520は、光流に基づいて光流の中心を演算する。より具体的に、光流中心演算部520は、光流の中心位置座標を算出するために予め決定されたイベントが発生した少なくとも1つのピクセルの位置と光流に含まれる当該ピクセルの速度ベクトルの大きさを用いて重心演算を行う。
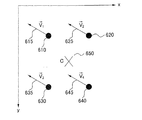
例えば、図6を参照すると、予め決定されたイベントが発生したピクセルがピクセル610、ピクセル620、ピクセル630、及びピクセル640である場合を仮定する。ここで、光流生成部によって生成された光流は、ピクセル610、ピクセル620、ピクセル630及びピクセル640それぞれに対応する速度ベクトルV1(615)、速度ベクトルV2(625)、速度ベクトルV3(635)、及び速度ベクトルV4(645)を含む。
光流中心演算部520は、ピクセル610、ピクセル620、ピクセル630及びピクセル640それぞれの位置(x軸ピクセル座標とy軸ピクセル座標)と速度ベクトルV1(615)、速度ベクトルV2(625)、速度ベクトルV3(635)及び速度ベクトルV4(645)それぞれの大きさ(x軸方向大きさとy軸方向大きさ)を数式(2)に代入し、光流の中心c(650)を算出する。
また、Z軸速度演算部530は、光流と光流の中心に基づいて第3速度Vzを演算する。
より具体的には、Z軸速度演算部530は、予め決定されたイベントが発生した少なくとも1つのピクセルの位置と光流の中心を用いて該当するピクセルに対応する第1ベクトルを生成する。さらに、Z軸速度演算部530は、光流に含まれる当該ピクセルの速度ベクトルと第1ベクトルを用いて内積演算を行うことによって、第3速度Vzを演算する。
例えば、図7を参照すると、図5(a)に示す光流中心演算部520によって演算された光流の中心がc(710)であり、予め決定されたイベントが発生したピクセルのうちi番目のピクセルをピクセル720とする。
Z軸速度演算部530は、c(710)の位置とピクセル720の位置を用いて第1ベクトルpi(715)を生成する。さらに、Z軸速度演算部530は、第1ベクトルpi(715)とi番目のピクセルの速度ベクトルVi(725)を数式(3)に代入し、第3速度Vzを算出する。
図5(b)を参照すると、物体がセンサ551に近くなる方向563に移動中である場合、Z軸速度演算部530によって演算されたVzは正(+)の値を有する。反対に、物体がセンサ551から遠ざかる方向に移動中である場合、Vzは負(−)の値を有する。
また、角速度演算部540は、光流と光流の中心に基づいて第4速度wを演算する。
より具体的には、角速度演算部540は、予め決定されたイベントが発生した少なくとも1つのピクセルの位置と光流の中心を用いて該当するピクセルに対応する第1ベクトルを生成する。さらに、角速度演算部540は、光流に含まれる当該ピクセルの速度ベクトルと第1ベクトルを用いて外積演算を行うことによって第4速度wを算出する。
例えば、図7を参照すると、図5(a)に示す光流中心演算部520によって演算された光流の中心がc(710)であり、予め決定されたイベントが発生したピクセルのうちi番目のピクセルをピクセル720とする。
角速度演算部540は、c(710)の位置とピクセル720の位置を用いて第1ベクトル715を生成する。さらに、角速度演算部540は、第1ベクトルpi(715)とi番目のピクセルの速度ベクトル725を数式(4)に代入し、第4速度wを算出する。
図5(b)を参照すると、物体が反時計回り564に回転中である場合、角速度演算部540によって演算されたwは正(+)の値を有する。反対に、物体が時計方向に回転中である場合、角速度演算部540によって演算されたwは負(−)の値を有する。
一実施形態に係るイベントベースイメージ処理装置は、イベントベースイメージセンサを用いる技術的な特徴を含む。イベントベースイメージセンサは、イメージに含まれた複数のピクセルそれぞれで非同期的(asynchronously)にイベント情報を生成する。
例えば、イベントベースイメージセンサは複数のピクセルのうち、予め決定されたイベントが発生したピクセルに対してのみイベント情報を生成する。これによって、一実施形態に係るイベントベースイメージ処理装置は、光流生成のためにイメージ情報をアップデートする時間を短縮できる。
例えば、イベントベースイメージ処理装置は、フレームごとにイメージ全体をスキャンする必要がなく、予め決定されたイベントが発生したピクセルに対してのみタイムスタンプをアップデートする。これによって、一実施形態に係るイベントベースイメージ処理装置は、光流を生成するために必要な演算時間又はメモリ空間を著しく減少させる技術を提供できる。
図8は、一実施形態に係るイベントベースイメージ処理方法を示すブロック図である。
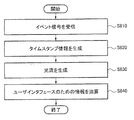
図8を参照すると、一実施形態に係るイベントベースイメージ処理方法は、イベントを受信するステップS810、タイムスタンプ情報を生成するステップS820、光流を生成するステップS830、及びユーザインタフェースのための情報を演算するステップS840を含む。
イベントを受信するステップS810は、複数のイメージピクセルそれぞれで予め決定されたイベントが発生したか否かを検出するセンサからイベント信号を受信する。タイムスタンプ情報を生成するステップS820は、イベント信号の受信に反応してイベント信号に対応する少なくとも1つのピクセルとイベント信号が出力された時間をマッピングさせることによって、タイムスタンプ情報を生成する。光流を生成するステップS830は、タイムスタンプ情報に基づいて少なくとも1つのピクセルの速度ベクトルを含む光流を生成する。ユーザインタフェースのための情報を演算するステップS840は、光流に基づいてユーザインタフェースのための情報を演算する。
図8に示された各ステップには、図1〜図7を参照して記述した事項がそのまま適用できるので、より詳細な説明は省略する。
本発明の以上の実施形態に係る方法は、多様なコンピュータ手段を介して様々な処理を実行するプログラム命令の形態で実現され、コンピュータ読取可能な記録媒体に記録される。コンピュータ読取可能な媒体は、プログラム命令、データファイル、データ構造などのうちの1つ又はその組合せを含む。媒体に記録されるプログラム命令は、本発明の目的のために特別に設計されて構成されるか、又は、コンピュータソフトウェア分野の技術を有する当業者にとって公知、且つ、使用可能である。コンピュータ読取可能な記録媒体の例としては、ハードディスク、フロッピー(登録商標)ディスク及び磁気テープのような磁気媒体、CD−ROM、DVDのような光記録媒体、光ディスクのような光磁気媒体、及びROM、RAM、フラッシュメモリなどのようなプログラム命令を保存して実行するように特別に構成されたハードウェア装置が含まれる。
上述したように、本発明を限定された実施形態と図面によって説明したが、本発明は、上記の実施形態に限定されることなく、本発明が属する分野における通常の知識を有する者であれば、このような実施形態から多様な修正及び変形が可能であろう。
従って、本発明の範囲は、開示された実施形態に限定されず、本発明の特許請求の範囲だけではなく該特許請求の範囲と均等なものなどによって定められるべきである。
100 イベントベースイメージ処理装置
110 センサ
120 タイムスタンプ部
130 光流生成部
200 タイムスタンプ情報
210、220、230 (i、j)位置、(i、j+1)位置、(i+1、j+1)位置のピクセル
240 2次元ベクトル
300 光流生成部
310 周辺ピクセル取得部
320 時間差算出部
330 距離差算出部
340 光流算出部
410、420、430 グラフ
421,431 棒
500 演算部
550、551 センサ平面、センサ
560 センサ平面と平行する平面
561、562、563、564 y軸方向、x軸方向、垂直方向、反時計回り
510 平面速度演算部
520 光流中心演算部
530 Z軸速度演算部
540 角速度演算部
610、620、630、640 (予め決定されたイベントが発生した)ピクセル
615、625、635、645 速度ベクトルV1、V2、V3、V4
710 光流の中心c
715 第1ベクトルpi
720 (予め決定されたイベントが発生したピクセルのうちi番目の)ピクセル
725 i番目のピクセルの速度ベクトルVi
110 センサ
120 タイムスタンプ部
130 光流生成部
200 タイムスタンプ情報
210、220、230 (i、j)位置、(i、j+1)位置、(i+1、j+1)位置のピクセル
240 2次元ベクトル
310 周辺ピクセル取得部
320 時間差算出部
330 距離差算出部
340 光流算出部
410、420、430 グラフ
421,431 棒
500 演算部
550、551 センサ平面、センサ
560 センサ平面と平行する平面
561、562、563、564 y軸方向、x軸方向、垂直方向、反時計回り
510 平面速度演算部
520 光流中心演算部
530 Z軸速度演算部
540 角速度演算部
610、620、630、640 (予め決定されたイベントが発生した)ピクセル
615、625、635、645 速度ベクトルV1、V2、V3、V4
710 光流の中心c
715 第1ベクトルpi
720 (予め決定されたイベントが発生したピクセルのうちi番目の)ピクセル
725 i番目のピクセルの速度ベクトルVi
Claims (29)
- 複数のイメージピクセルそれぞれで予め決定されたイベントが発生したか否かを検出し、前記検出に反応してイベント信号を出力するセンサと、
前記イベント信号に対応する少なくとも1つのピクセルと前記イベント信号が出力された時間をマッピングさせることによってタイムスタンプ情報を生成するタイムスタンプ部と、
前記イベント信号の出力に反応して前記タイムスタンプ情報に基づいて光流を生成する光流生成部と、
を備えることを特徴とするイベントベースイメージ処理装置。 - 前記センサは、前記複数のイメージピクセルのうち、前記予め決定されたイベントが発生した一部のピクセルそれぞれに対応するイベント信号を非同期的に出力することを特徴とする請求項1に記載のイベントベースイメージ処理装置。
- 前記光流は、前記少なくとも1つのピクセルの速度ベクトルを含むことを特徴とする請求項1に記載のイベントベースイメージ処理装置。
- 前記光流生成部は、
前記イベント信号の出力に反応して、前記複数のイメージピクセルのうち前記少なくとも1つのピクセル及び前記少なくとも1つのピクセルに隣接する周辺ピクセルそれぞれの速度ベクトルを非同期的に算出する部分算出部と、
予め決定された周期ごとに、前記複数のイメージピクセルの速度ベクトルを算出する全体算出部と、
の少なくとも1つを含むことを特徴とする請求項1に記載のイベントベースイメージ処理装置。 - 前記光流生成部は、
前記少なくとも1つのピクセルの周辺ピクセルを取得する周辺ピクセル取得部と、
前記タイムスタンプ情報を用いて前記少なくとも1つのピクセルと前記周辺ピクセルとの間の時間差に関連する情報を算出する時間差算出部と、
前記少なくとも1つのピクセルと前記周辺ピクセルとの間の距離差に関連する情報を算出する距離差算出部と、
前記時間差に関連する情報と前記距離差に関連する情報に基づいて前記光流を算出する光流算出部と、
を備えることを特徴とする請求項1に記載のイベントベースイメージ処理装置。 - 前記時間差算出部は、前記少なくとも1つのピクセルと前記周辺ピクセルとの間の時間差が予め決定されたウィンドウ範囲外にある場合、前記時間差に関連する情報を0と算出することを特徴とする請求項5に記載のイベントベースイメージ処理装置。
- 前記距離差に関連する情報は、前記少なくとも1つのピクセルと前記周辺ピクセルとの間のピクセル距離の逆数を含むことを特徴とする請求項5に記載のイベントベースイメージ処理装置。
- 前記光流算出部は、前記光流を算出するために前記時間差に関連する情報と前記距離差に関連する情報を用いて前記少なくとも1つのピクセルに対応する2次元ベクトルAを算出し、前記2次元ベクトルAを前記2次元ベクトルA自身の内積値で割り算することを特徴とする請求項5に記載のイベントベースイメージ処理装置。
- 前記光流に基づいてユーザインタフェースのための情報を算出する演算部をさらに備えることを特徴とする請求項1に記載のイベントベースイメージ処理装置。
- 前記ユーザインタフェースのための情報は、
前記センサが位置するセンサ平面と平行する平面で前記複数のイメージピクセルに含まれた物体がx軸方向に動く第1速度と、
前記平行する平面で前記物体がy軸方向に動く第2速度と、
前記物体が前記平行する平面と垂直方向に動く第3速度と、
前記平行する平面で前記物体が円形に回転する第4速度と、
の少なくとも1つを含むことを特徴とする請求項9に記載のイベントベースイメージ処理装置。 - 前記演算部は、
前記光流に基づいて前記第1速度及び前記第2速度を算出する平面速度演算部と、
前記光流に基づいて前記光流の中心を算出する光流中心演算部と、
前記光流と前記光流の中心に基づいて前記第3速度を演算するZ軸速度演算部と、
前記光流と前記光流の中心に基づいて前記第4速度を演算する角速度演算部と、
を備えることを特徴とする請求項10に記載のイベントベースイメージ処理装置。 - 前記平面速度演算部は、前記第1速度及び前記第2速度を算出するために前記光流に対して平均値演算を行うことを特徴とする請求項10に記載のイベントベースイメージ処理装置。
- 前記光流中心演算部は、前記光流の中心を算出するために前記少なくとも1つのピクセルの位置と前記光流に含まれる前記少なくとも1つのピクセルの速度ベクトルの大きさを用いて重心演算を行うことを特徴とする請求項10に記載のイベントベースイメージ処理装置。
- 前記Z軸速度演算部は、前記第3速度を算出するために前記光流の中心と前記少なくとも1つのピクセルの位置を用いて前記少なくとも1つのピクセルに対応する第1ベクトルを生成し、前記第1ベクトルと前記光流に含まれる前記少なくとも1つのピクセルの速度ベクトルを用いて内積演算を行うことを特徴とする請求項10に記載のイベントベースイメージ処理装置。
- 前記角速度演算部は、前記第4速度を算出するために前記光流の中心と前記少なくとも1つのピクセルの位置を用いて前記少なくとも1つのピクセルに対応する第1ベクトルを生成し、前記第1ベクトルと前記光流に含まれる前記少なくとも1つのピクセルの速度ベクトルを用いて外積演算を行うことを特徴とする請求項10に記載のイベントベースイメージ処理装置。
- 前記タイムスタンプ情報は、前記複数のイメージピクセルそれぞれで前記予め決定されたイベントが最近発生した時間に関連する情報を含むことを特徴とする請求項1に記載のイベントベースイメージ処理装置。
- 前記予め決定されたイベントは、単位時間に予め決定された数値以上に明るくなる場合発生するイベントと、
前記単位時間に前記予め決定された数値以上に暗くなる場合発生するイベントと、
の少なくとも1つを含むことを特徴とする請求項1に記載のイベントベースイメージ処理装置。 - 複数のイメージピクセルそれぞれで予め決定されたイベントが発生したか否かを検出するセンサからイベント信号を受信するステップと、
前記イベント信号の受信に反応して前記イベント信号に対応する少なくとも1つのピクセルと前記イベント信号が出力された時間をマッピングさせることによってタイムスタンプ情報を生成するステップと、
前記タイムスタンプ情報に基づいて前記少なくとも1つのピクセルの速度ベクトルを含む光流を生成するステップと、
を含むことを特徴とするイベントベースイメージ処理方法。 - 前記光流を生成するステップは、
前記少なくとも1つのピクセルの周辺ピクセルを取得するステップと、
前記タイムスタンプ情報を用いて前記少なくとも1つのピクセルと前記周辺ピクセルとの間の時間差に関連する情報を算出するステップと、
前記タイムスタンプ情報を用いて前記少なくとも1つのピクセルと前記周辺ピクセルとの間の距離差に関連する情報を算出するステップと、
前記時間差に関連する情報と前記距離差に関連する情報に基づいて前記光流を算出するステップと、
を含むことを特徴とする請求項18に記載のイベントベースイメージ処理方法。 - 前記光流に基づいてユーザインタフェースのための情報を演算するステップをさらに含み、
前記ユーザインタフェースのための情報は、
前記センサが位置するセンサ平面と平行する平面で前記複数のイメージピクセルに含まれた物体がx軸方向に動く第1速度と、
前記平行する平面で前記物体がy軸方向に動く第2速度と、
前記物体が前記平行する平面と垂直方向に動く第3速度と、
前記平行する平面で前記物体が円形に回転する第4速度と、
の少なくとも1つを含むことを特徴とする請求項18に記載のイベントベースイメージ処理方法。 - 前記演算するステップは、
前記光流に基づいて前記第1速度及び前記第2速度を算出するステップと、
前記光流に基づいて前記光流の中心を算出するステップと、
前記光流と前記光流の中心に基づいて前記第3速度を算出するステップと、
前記光流と前記光流の中心に基づいて前記第4速度を算出するステップと、
を含むことを特徴とする請求項20に記載のイベントベースイメージ処理方法。 - 請求項18乃至請求項21のいずれか1項に記載の方法を実行させるためのプログラムが記録されたコンピュータで読み出し可能な記録媒体。
- イメージプロセッサにおいて、
複数のピクセルを含む入力イメージデータを受信し、前記複数のピクセルそれぞれの明るさの変化が予め決定された値よりも大きいか否かを検出し、前記複数のピクセルのうち前記明るさの変化が前記予め決定された値よりも大きい少なくとも1つのピクセルそれぞれに対応するそれぞれの信号を出力するセンサと、
前記それぞれの信号を受信し、前記それぞれの信号に基づいて前記少なくとも1つのピクセルそれぞれを前記明るさの変化が発生したそれぞれの時間にマッピングする情報を生成するタイムスタンパーと、
前記タイムスタンパーによって生成された前記情報に基づいて光流を生成する光流生成部と、
を備えることを特徴とするイメージプロセッサ。 - 前記タイムスタンパーは前記情報を格納し、前記センサから新しい信号を受信する場合に前記情報を更新して既に格納された情報は廃棄することを特徴とする請求項23に記載のイメージプロセッサ。
- 前記センサは、前記明るさの変化を検出するためにマイクロ秒当たり一回ずつセンシング動作を行うことを特徴とする請求項24に記載のイメージプロセッサ。
- 前記光流は、前記少なくとも1つのピクセルそれぞれの速度ベクトルを含むことを特徴とする請求項23に記載のイメージプロセッサ。
- 前記少なくとも1つのピクセルのうちいずれか1つのピクセルの速度ベクトルは、前記いずれか1つのピクセルと隣接する隣接ピクセルに関連する情報を用いて算出されることを特徴とする請求項26に記載のイメージプロセッサ。
- 前記隣接ピクセルに関連する情報は、前記いずれか1つのピクセルと前記隣接ピクセルそれぞれの間の距離を含むことを特徴とする請求項27に記載のイメージプロセッサ。
- 前記隣接ピクセルに関連する情報は、前記いずれか1つのピクセルと前記隣接ピクセルそれぞれの間の時間差を含むことを特徴とする請求項27に記載のイメージプロセッサ。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR10-2012-0065409 | 2012-06-19 | ||
| KR20120065409 | 2012-06-19 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2014002744A true JP2014002744A (ja) | 2014-01-09 |
Family
ID=48651879
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2013127816A Pending JP2014002744A (ja) | 2012-06-19 | 2013-06-18 | イベントベースイメージ処理装置及びその装置を用いた方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9143680B2 (ja) |
| EP (1) | EP2677500B1 (ja) |
| JP (1) | JP2014002744A (ja) |
| KR (1) | KR102070562B1 (ja) |
| CN (1) | CN103516946B (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020095385A1 (ja) * | 2018-11-07 | 2020-05-14 | 株式会社マクニカ | データロガー装置 |
| JP2020522067A (ja) * | 2017-05-29 | 2020-07-27 | ユニベアズィテート チューリッヒ | 動的視覚センサ用ブロックマッチングオプティカルフローとステレオ視 |
| CN111771210A (zh) * | 2018-01-11 | 2020-10-13 | 健赛特生物技术公司 | 用于处理由基于事件的光传感器生成的异步信号的方法和装置 |
| JP2021026621A (ja) * | 2019-08-07 | 2021-02-22 | トヨタ自動車株式会社 | イメージセンサ |
| DE112021004793T5 (de) | 2020-09-07 | 2023-07-06 | Fanuc Corporation | Vorrichtung für dreidimensionale Messungen |
Families Citing this family (49)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| FR2985065B1 (fr) * | 2011-12-21 | 2014-01-10 | Univ Paris Curie | Procede d'estimation de flot optique a partir d'un capteur asynchrone de lumiere |
| US9767571B2 (en) * | 2013-07-29 | 2017-09-19 | Samsung Electronics Co., Ltd. | Apparatus and method for analyzing image including event information |
| KR102203810B1 (ko) | 2013-10-01 | 2021-01-15 | 삼성전자주식회사 | 사용자 입력에 대응되는 이벤트를 이용한 유저 인터페이싱 장치 및 방법 |
| JP5953295B2 (ja) * | 2013-12-12 | 2016-07-20 | 京セラドキュメントソリューションズ株式会社 | ファクシミリ装置 |
| FR3020699A1 (fr) * | 2014-04-30 | 2015-11-06 | Centre Nat Rech Scient | Procede de suivi de forme dans une scene observee par un capteur asynchrone de lumiere |
| KR102347249B1 (ko) | 2014-10-21 | 2022-01-04 | 삼성전자주식회사 | 외부 물체의 움직임과 연관된 이벤트에 응답하여 화면을 디스플레이하는 장치 및 방법 |
| KR102357680B1 (ko) * | 2014-11-17 | 2022-02-03 | 삼성전자주식회사 | 이벤트에 기반하여 객체의 이동을 감지하는 장치 및 방법 |
| KR102357965B1 (ko) | 2015-01-12 | 2022-02-03 | 삼성전자주식회사 | 객체 인식 방법 및 장치 |
| KR102298652B1 (ko) * | 2015-01-27 | 2021-09-06 | 삼성전자주식회사 | 시차 결정 방법 및 장치 |
| FR3033914A1 (fr) * | 2015-03-16 | 2016-09-23 | Univ Pierre Et Marie Curie (Paris 6) | Procede de traitement d'un signal asynchrone |
| KR20160121287A (ko) * | 2015-04-10 | 2016-10-19 | 삼성전자주식회사 | 이벤트에 기반하여 화면을 디스플레이하는 방법 및 장치 |
| US11002531B2 (en) | 2015-04-20 | 2021-05-11 | Samsung Electronics Co., Ltd. | CMOS image sensor for RGB imaging and depth measurement with laser sheet scan |
| US20160309135A1 (en) | 2015-04-20 | 2016-10-20 | Ilia Ovsiannikov | Concurrent rgbz sensor and system |
| US10145678B2 (en) | 2015-04-20 | 2018-12-04 | Samsung Electronics Co., Ltd. | CMOS image sensor for depth measurement using triangulation with point scan |
| US10250833B2 (en) | 2015-04-20 | 2019-04-02 | Samsung Electronics Co., Ltd. | Timestamp calibration of the 3D camera with epipolar line laser point scanning |
| US11736832B2 (en) | 2015-04-20 | 2023-08-22 | Samsung Electronics Co., Ltd. | Timestamp calibration of the 3D camera with epipolar line laser point scanning |
| KR102307055B1 (ko) * | 2015-04-28 | 2021-10-01 | 삼성전자주식회사 | 이벤트 기반 센서의 출력에 기초하여 정적 패턴을 추출하는 방법 및 장치 |
| EP3120897A1 (en) * | 2015-07-22 | 2017-01-25 | Université Pierre et Marie Curie (Paris 6) | Method for downsampling a signal outputted by an asynchronous sensor |
| KR102433931B1 (ko) * | 2015-07-30 | 2022-08-19 | 삼성전자주식회사 | 움직임 인식 방법 및 움직임 인식 장치 |
| CN105160703B (zh) * | 2015-08-25 | 2018-10-19 | 天津师范大学 | 一种使用时域视觉传感器的光流计算方法 |
| KR102512828B1 (ko) * | 2016-01-22 | 2023-03-22 | 삼성전자주식회사 | 이벤트 신호 처리 방법 및 장치 |
| CN105606092B (zh) * | 2016-02-04 | 2019-02-15 | 中国科学院电子学研究所 | 一种室内机器人定位方法及系统 |
| WO2017158483A1 (en) | 2016-03-14 | 2017-09-21 | Insightness Ag | A vision sensor, a method of vision sensing, and a depth sensor assembly |
| EP3229106A1 (en) * | 2016-04-06 | 2017-10-11 | Facebook, Inc. | Efficient determination of optical flow between images |
| US10057562B2 (en) | 2016-04-06 | 2018-08-21 | Facebook, Inc. | Generating intermediate views using optical flow |
| CN105957060B (zh) * | 2016-04-22 | 2019-01-11 | 天津师范大学 | 一种基于光流分析的tvs事件分簇方法 |
| KR20180014992A (ko) * | 2016-08-02 | 2018-02-12 | 삼성전자주식회사 | 이벤트 신호 처리 방법 및 장치 |
| US20180146149A1 (en) | 2016-11-21 | 2018-05-24 | Samsung Electronics Co., Ltd. | Event-based sensor, user device including the same, and operation method of the same |
| KR102612194B1 (ko) * | 2016-12-14 | 2023-12-11 | 삼성전자주식회사 | 이벤트 기반 센서 및 이벤트 기반 센싱 방법 |
| CN110192387B (zh) | 2016-12-30 | 2022-06-17 | 索尼先进视觉传感公司 | 用于基于事件的视觉传感器的数据速率控制 |
| US11138742B2 (en) | 2017-02-14 | 2021-10-05 | The Trustees Of The University Of Pennsylvania | Event-based feature tracking |
| KR102282140B1 (ko) * | 2017-03-08 | 2021-07-28 | 삼성전자주식회사 | 픽셀, 픽셀 구동 회로 및 이를 포함하는 비전 센서 |
| CN108574793B (zh) | 2017-03-08 | 2022-05-10 | 三星电子株式会社 | 被配置为重新生成时间戳的图像处理设备及包括其在内的电子设备 |
| CN111149350B (zh) * | 2017-09-28 | 2022-02-22 | 苹果公司 | 使用事件相机生成静态图像 |
| CN111713101B (zh) * | 2017-12-11 | 2022-05-13 | 普罗菲西公司 | 基于事件的图像传感器及其操作方法 |
| US11212468B2 (en) * | 2018-03-14 | 2021-12-28 | Sony Advanced Visual Sensing Ag | Event-based vision sensor with direct memory control |
| CN108764078B (zh) * | 2018-05-15 | 2019-08-02 | 上海芯仑光电科技有限公司 | 一种事件数据流的处理方法及计算设备 |
| SG11202010898TA (en) * | 2018-05-22 | 2020-12-30 | Celepixel Tech Co Ltd | Optical flow calculation method and computing device |
| CN112368756B (zh) * | 2018-07-16 | 2022-11-11 | 豪威芯仑传感器(上海)有限公司 | 计算对象和车辆碰撞时间的方法、计算设备及车辆 |
| EP3663963B1 (de) | 2018-12-04 | 2021-03-10 | Sick Ag | Lesen von optischen codes |
| EP3690736A1 (en) * | 2019-01-30 | 2020-08-05 | Prophesee | Method of processing information from an event-based sensor |
| JP7298277B2 (ja) * | 2019-04-25 | 2023-06-27 | トヨタ自動車株式会社 | イベントカメラ |
| DE102019127826B4 (de) * | 2019-10-15 | 2021-06-02 | Sick Ag | Sicherer optoelektronischer Sensor und Verfahren zum Absichern eines Überwachungsbereichs |
| DE102019128814B4 (de) | 2019-10-25 | 2021-05-20 | Sick Ag | Kamera zur Erfassung eines Objektstroms und Verfahren zur Bestimmung der Höhe von Objekten |
| DE102019129986A1 (de) | 2019-11-07 | 2021-05-12 | Sick Ag | Optoelektronischer Sensor und Verfahren zur Erfassung von Objekten |
| DE102020101794A1 (de) | 2020-01-27 | 2021-07-29 | Sick Ag | Absichern einer Maschine |
| KR20220076944A (ko) * | 2020-12-01 | 2022-06-08 | 삼성전자주식회사 | 비전 센서, 이를 포함하는 이미지 처리 장치 및 비전 센서의 동작 방법 |
| US11928264B2 (en) * | 2021-12-16 | 2024-03-12 | Lenovo (Singapore) Pte. Ltd. | Fixed user interface navigation |
| EP4346222A1 (de) | 2022-09-27 | 2024-04-03 | Sick Ag | Kamera und verfahren zur erkennung von blitzen |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008084287A (ja) * | 2006-08-28 | 2008-04-10 | Sony Corp | 情報処理装置、撮像装置、情報処理システム、装置制御方法及びプログラム |
| FR2985065A1 (fr) * | 2011-12-21 | 2013-06-28 | Univ Paris Curie | Procede d'estimation de flot optique a partir d'un capteur asynchrone de lumiere |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6253161B1 (en) * | 1997-07-10 | 2001-06-26 | Universite Laval | Integrated motion vision sensor |
| US8027531B2 (en) * | 2004-07-21 | 2011-09-27 | The Board Of Trustees Of The Leland Stanford Junior University | Apparatus and method for capturing a scene using staggered triggering of dense camera arrays |
| CN101204079B (zh) | 2005-06-03 | 2011-07-27 | 苏黎世大学 | 用于检测与时间相关的图像数据的光敏元件阵列 |
| US20070280507A1 (en) | 2006-06-01 | 2007-12-06 | Beddhu Murali | Apparatus and Upwind Methods for Optical Flow Velocity Estimation |
| US7659967B2 (en) | 2007-03-05 | 2010-02-09 | Geoffrey Louis Barrows | Translational optical flow sensor |
| CN100498871C (zh) * | 2007-08-30 | 2009-06-10 | 济南卓信智能科技有限公司 | 一种道路交通参数检测装置及检测方法 |
| US20100053151A1 (en) | 2008-09-02 | 2010-03-04 | Samsung Electronics Co., Ltd | In-line mediation for manipulating three-dimensional content on a display device |
| JP4666049B2 (ja) * | 2008-10-17 | 2011-04-06 | 株式会社デンソー | 光源識別装置、光源識別プログラム、車両検出装置、およびライト制御装置 |
| US10066977B2 (en) * | 2009-01-26 | 2018-09-04 | Canon U.S. Life Sciences, Inc. | Microfluidic flow monitoring |
| CN101510358B (zh) * | 2009-03-20 | 2010-08-25 | 吉林大学 | 采用视频图像处理实时统计车流量的方法及装置 |
| US8600166B2 (en) | 2009-11-06 | 2013-12-03 | Sony Corporation | Real time hand tracking, pose classification and interface control |
| JP5400718B2 (ja) * | 2010-07-12 | 2014-01-29 | 株式会社日立国際電気 | 監視システムおよび監視方法 |
| US8768006B2 (en) | 2010-10-19 | 2014-07-01 | Hewlett-Packard Development Company, L.P. | Hand gesture recognition |
| TWI452540B (zh) * | 2010-12-09 | 2014-09-11 | Ind Tech Res Inst | 影像式之交通參數偵測系統與方法及電腦程式產品 |
-
2013
- 2013-05-29 KR KR1020130060979A patent/KR102070562B1/ko active IP Right Grant
- 2013-05-29 EP EP13169651.0A patent/EP2677500B1/en active Active
- 2013-06-18 JP JP2013127816A patent/JP2014002744A/ja active Pending
- 2013-06-19 CN CN201310244056.7A patent/CN103516946B/zh active Active
- 2013-06-19 US US13/921,808 patent/US9143680B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2008084287A (ja) * | 2006-08-28 | 2008-04-10 | Sony Corp | 情報処理装置、撮像装置、情報処理システム、装置制御方法及びプログラム |
| FR2985065A1 (fr) * | 2011-12-21 | 2013-06-28 | Univ Paris Curie | Procede d'estimation de flot optique a partir d'un capteur asynchrone de lumiere |
| JP2015507261A (ja) * | 2011-12-21 | 2015-03-05 | ユニヴェルシテ・ピエール・エ・マリ・キュリ・(パリ・6) | 非同期光センサに基づいてオプティカルフローを推定する方法 |
Non-Patent Citations (2)
| Title |
|---|
| RYAD BENOSMA,外4名: "Asynchronous frameless event−based optical flow", NEURAL NETWORKS, vol. 27, JPN6017015039, March 2012 (2012-03-01), pages 32 - 37, XP055035741, ISSN: 0003547057, DOI: 10.1016/j.neunet.2011.11.001 * |
| TOBI DELBRUCK: "Frame−free dynamic digital vision", PROCESSINGS OF INTERNATIONAL SYMPOSIUM ON SECURE-LIFE ELECTRONICS - ADVANCED ELECTRONICS FOR QUALITY, JPN6017015041, 7 March 2008 (2008-03-07), JP, pages 21 - 26, ISSN: 0003547058 * |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020522067A (ja) * | 2017-05-29 | 2020-07-27 | ユニベアズィテート チューリッヒ | 動的視覚センサ用ブロックマッチングオプティカルフローとステレオ視 |
| JP7253258B2 (ja) | 2017-05-29 | 2023-04-06 | ユニベアズィテート チューリッヒ | 動的視覚センサ用ブロックマッチングオプティカルフローとステレオ視 |
| CN111771210A (zh) * | 2018-01-11 | 2020-10-13 | 健赛特生物技术公司 | 用于处理由基于事件的光传感器生成的异步信号的方法和装置 |
| CN111771210B (zh) * | 2018-01-11 | 2024-04-26 | 健赛特生物技术公司 | 用于处理由基于事件的光传感器生成的异步信号的方法和装置 |
| WO2020095385A1 (ja) * | 2018-11-07 | 2020-05-14 | 株式会社マクニカ | データロガー装置 |
| JP2021026621A (ja) * | 2019-08-07 | 2021-02-22 | トヨタ自動車株式会社 | イメージセンサ |
| DE112021004793T5 (de) | 2020-09-07 | 2023-07-06 | Fanuc Corporation | Vorrichtung für dreidimensionale Messungen |
Also Published As
| Publication number | Publication date |
|---|---|
| CN103516946B (zh) | 2018-01-02 |
| EP2677500B1 (en) | 2021-06-23 |
| KR102070562B1 (ko) | 2020-01-30 |
| EP2677500A3 (en) | 2017-04-26 |
| US20130335595A1 (en) | 2013-12-19 |
| EP2677500A2 (en) | 2013-12-25 |
| CN103516946A (zh) | 2014-01-15 |
| KR20130142913A (ko) | 2013-12-30 |
| US9143680B2 (en) | 2015-09-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2014002744A (ja) | イベントベースイメージ処理装置及びその装置を用いた方法 | |
| US8253795B2 (en) | Egomotion speed estimation on a mobile device | |
| KR102248404B1 (ko) | 움직임 분석 방법 및 움직임 분석 장치 | |
| US20170178305A1 (en) | Morphological and geometric edge filters for edge enhancement in depth images | |
| US10600189B1 (en) | Optical flow techniques for event cameras | |
| JP2021072615A (ja) | 映像復元装置及び方法 | |
| CN109186592B (zh) | 用于视觉惯导信息融合的方法和装置以及存储介质 | |
| JP2007129709A (ja) | イメージングデバイスをキャリブレートするための方法、イメージングデバイスの配列を含むイメージングシステムをキャリブレートするための方法およびイメージングシステム | |
| KR20170130594A (ko) | ToF 픽셀 어레이의 해상도를 증가시키기 위한 방법 및 장치 | |
| CN109040525B (zh) | 图像处理方法、装置、计算机可读介质及电子设备 | |
| JP2014199964A (ja) | 撮像装置および画像処理装置 | |
| WO2021031790A1 (zh) | 一种信息处理方法、装置、电子设备、存储介质和程序 | |
| WO2018044378A1 (en) | Quantifying gas leak rates using frame images acquired by a camera | |
| JP5463584B2 (ja) | 変位計測方法、変位計測装置及び変位計測プログラム | |
| CN112399032A (zh) | 一种基于检测器的脉冲式图像传感器的光流获取方法 | |
| CN111696143B (zh) | 一种事件数据的配准方法与系统 | |
| US9842402B1 (en) | Detecting foreground regions in panoramic video frames | |
| Lee et al. | Four DoF gesture recognition with an event-based image sensor | |
| JP2011154634A (ja) | 画像処理装置、画像処理方法及び画像処理用プログラム | |
| O'Sullivan et al. | Empirical modelling of rolling shutter effect | |
| JP2019092089A (ja) | 画像処理装置、画像表示システム、画像処理方法、およびプログラム | |
| US20170061633A1 (en) | Sensing object depth within an image | |
| US20230410340A1 (en) | Device and method for depth measurement of 3d irregular surfaces | |
| CN116977565A (zh) | 三维场景重建方法及其装置 | |
| TWI612805B (zh) | 影像處理方法及其系統 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20160613 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20170323 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20170502 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20171205 |