JP2013075606A - Platform of movable carriage - Google Patents
Platform of movable carriage Download PDFInfo
- Publication number
- JP2013075606A JP2013075606A JP2011216469A JP2011216469A JP2013075606A JP 2013075606 A JP2013075606 A JP 2013075606A JP 2011216469 A JP2011216469 A JP 2011216469A JP 2011216469 A JP2011216469 A JP 2011216469A JP 2013075606 A JP2013075606 A JP 2013075606A
- Authority
- JP
- Japan
- Prior art keywords
- damper
- cylinder
- tip
- lifting platform
- cross
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Landscapes
- Handcart (AREA)
Abstract
Description
この発明は、移動台車の昇降台に関し、電動モータによって伸縮される伸縮シリンダを介してクロスリンクを拡縮して昇降台を昇降させるもので、昇降台の上昇起動を円滑に安定姿勢に行わせるものである。 The present invention relates to a lifting platform for a moving carriage, which expands and contracts a lifting link by extending and retracting a cross link via an expansion / contraction cylinder that is expanded and contracted by an electric motor, and smoothly lifts and lowers the lifting platform in a stable posture. It is.
移動台車の昇降台をクロスリンク機構を介して昇降させる技術(例えば、特許文献1参照)や、クロスリンク機構にダンパシリンダを設ける技術(例えば、特許文献2参照)等が知られている。 There are known a technique (for example, see Patent Document 1) for raising and lowering a lifting platform of a movable carriage via a cross link mechanism, a technique for providing a damper cylinder in the cross link mechanism (for example, see Patent Document 2), and the like.
電動モータによって伸縮シリンダを伸長させてクロスリンクを開拡し昇降台を上昇させる形態にあっては、昇降台の下降位置でのクロスリンクと伸縮シリンダとが略平行に近い状態に並んだ状態になるため、この昇降台の上昇起動時における伸縮シリンダの伸出方向の出力がクロスリンクの長さ方向に沿って作用して、昇降台を上昇し難い。 In the form in which the telescopic cylinder is extended by the electric motor to open the cross link and raise the lifting platform, the cross link and the telescopic cylinder at the lowered position of the lifting platform are arranged in a state of being almost parallel. Therefore, the output in the extending direction of the telescopic cylinder at the time of starting up the lifting platform acts along the length direction of the cross link, and it is difficult to lift the lifting platform.
請求項1に記載の発明は、車台1上に、基端部の回動支持部Aと先端部のスライド支持部Bを有するクロスリンク2,3を介して昇降可能の昇降台4を支持し、前記クロスリンク2の先端部側とこの下方の車台1との間に、電動モータ5によって伸縮してこれらクロスリンク2,3を拡縮する伸縮シリンダ6を設け、前記クロスリンク2,3の先端部側の昇降台4部と車台1部との間に、この昇降台4の下降位置で前記伸縮シリンダ6と略平行状態となるダンパシリンダ7を設けたことを特徴とする移動台車の昇降台の構成とする。
According to the first aspect of the present invention, a
電動モータ5の駆動によって伸縮シリンダ6を伸縮して、クロスリンク2,3を拡縮し昇降台4を昇降する。この伸縮シリンダ6を縮小させて、クロスリンク2,3を閉縮して昇降台4を最下降位置におくときは、クロスリンク2,3は車台1と昇降台4との間に位置してこれらと平行状態として、この昇降台4の高さを低位置に維持させることができる。この下降位置の昇降台4を前記伸縮シリンダ6の伸出によって上昇するときは、この伸縮シリンダ6の伸出力によって前記クロスリンク2,3が回動支持部Aの周りに回動されると共に、ダンパシリンダ7の弾発力が働いていて、このクロスリンク2,3の開拡回動が補助されて、円滑にリンク回動が行われる。前記伸縮シリンダ6は、クロスリンク2,3が閉縮して、昇降台4が下降された位置にあるときは、これらクロスリンク2,3の方向に沿うように並列重合の形態にあるため、伸縮シリンダ6の伸長力が働いてもクロスリンク2,3の起立回動が行われ難いが、このクロスリンク2,3の起立回動には、伸縮シリンダ6と平行状態にダンパシリンダ7の弾発力が働いているために、これらクロスリンク2,3の起立回動が速やかに、円滑に行われる。
The
請求項2に記載の発明は、前記ダンパシリンダ7は、屈折回動可能のダンパアーム8を介して前記昇降台4の先端部に連結し、クロスリンク2,3の拡縮により上昇時は開拡して昇降台4の先端部を支持し、下降時は閉縮して前記ダンパーアーム8を屈折回動しながらダンパシリンダ7を伸縮シリンダ6と略平行状に重合収納させることを特徴とする。
According to a second aspect of the present invention, the
前記のように電動モータ5による伸縮シリンダ6の伸縮によってクロスリンク2,3を拡縮させて、昇降台4を昇降させる。この昇降台4の先端部側はダンパシリンダ7の先端部9に設けられたダンパアーム8によって連結支持される。このダンパシリンダ7の伸縮によるダンパ支持域は比較的短い領域に制限されるが、昇降台4がこのダンパ支持域を越えて高位置に上昇されたときは、ダンパシリンダ7先端部9のダンパアーム8が、屈折回動状態からこのダンパシリンダ7の伸出方向に開いて先端に連結の昇降台4の先端部をダンパ支持する。
As described above, the
請求項3に記載の発明は、前記クロスリンク2の先端部側には、前記ダンパアーム8を連結するダンパシリンダ7の先端部9を摺動案内するガイドプレート10を設けたことを特徴とする。
The invention described in
前記のように伸縮シリンダ6の伸縮によって拡縮されるクロスリンク2,3を介して昇降される昇降台4は、この先端部がダンパシリンダ7の先端部9のダンパアーム8によって連結支持されて、ダンパシリンダ7のダンパ有効領域においては、このダンパシリンダ7の先端部9によって、クロスリンク2のガイドプレート10が案内支持されて、このクロスリンク2を介して昇降台4を支持すると共に、このダンパシリンダ7の先端部9と昇降台4の先端部との間のダンパアーム8を介して、この昇降台4の先端部を支持する。そして、更に伸縮シリンダ6の伸長によって昇降台4を高位置へ上昇するときは、このダンパシリンダ7の先端部9が、クロスリンク2のガイドプレート10の摺動域から離反させて、ダンパアーム8を上方へ大きく開いて、昇降台4の先端部をダンパ支持する。又、昇降台4をこの上昇位置から逆に下降させる場合は、これらダンパシリンダ7に対するダンパアーム8の開きが閉じて、このダンパシリンダ7の先端部9をクロスリンク2のガイドプレート10に摺動支持させる(離反点位置に戻す)ことができ、更に、この先端部9をガイドプレート10に摺動させながら、この伸縮シリンダ6の縮小によって昇降台4を下降させることができる。
As described above, the
請求項1に記載の発明は、前記クロスリンク2,3によって昇降される昇降台4を、電動モータ5によって伸縮される伸縮シリンダ6によって昇降させると共に、この昇降台4の先端部を支持するダンパシリンダ7を、前記昇降台4下降位置の伸縮シリンダ6と略平行状に設けるものであるから、この昇降台4が下降位置にあって、クロスリンク2,3がこの昇降台4と平行状に伏せた状態にあっても、伸縮シリンダ6が伸長開始するときは、ダンパシリンダ7の初期弾発力が同時に同方向へ作用していて、前記昇降台4の上昇始動を円滑に、軽快に行わせることができる。又、前記クロスリンク2,3の先端部はスライド支持部Bとしているが、この昇降台4の先端部は、前記ダンパシリンダ7によって直接連結支持されるため、横振れや、上下揺動等を軽減して、安定姿勢に維持することができる。しかも、昇降台4の上昇開始駆動は、前記伸縮シリンダ6に対するダンパシリンダ7の平行状配置形態によるもので、構成を簡単にすることができ、電動モータ5の出力を小さくして、軽量、安価にすることができる。
According to the first aspect of the present invention, the
請求項2に記載の発明は、ダンパシリンダ7の先端部9にダンパアーム8を屈折可能に連結して、昇降台4の先端部を連結支持するものであるから、ダンパシリンダ7の伸縮域を短くして、昇降行程を高くすることができ、しかも、昇降台4の全工程においてダンパ作用を有効に働かせることができ、ダンパシリンダ7の先端部9にダンパアーム8を連結する構成は簡単である。又、ダンパアーム8をダンパシリンダ7の先端部9に屈折させて、このダンパシリンダ7に沿わせるように屈折回動する形態とすることによって、昇降台4を下降させたときは、これらダンパシリンダ7及びダンパアーム8を伸縮シリンダ6に平行状に重合させて、下降した昇降台4の下限位置を低く設定することができ、前記ダンパシリンダ7の長さ、構成を小形簡潔化することができる。
According to the second aspect of the present invention, the
請求項3に記載の発明は、前記のようにダンパシリンダ7の先端部9にダンパアーム8を設けて、前記昇降台4の先端部を安定的にダンパ支持するもので、昇降台4の所定の昇降高さ域においては、クロスリンク2の先端部側に設けるガイドプレート10に、前記ダンパシリンダ7の先端部9を直接摺動させて支持することにより、このクロスリンク2を介して昇降台4の先端部をダンパ支持して、クロスリンク2の安定した円滑な拡縮作動を行わせることができる。又、昇降台4が前記所定高さ以上に上昇された姿勢では、ダンパシリンダ7の先端部9のダンパアーム8の屈折角が開いて、昇降台4先端部の支持力を増すことができ、支持を安定させるもので、このダンパシリンダ7の先端部9をクロスリンク2のガイドプレート10から離反させて、これらダンパシリンダ7、及びダンパアーム8を介して、直接昇降台4の先端部をダンパ支持することによって、ダンパシリンダ7のダンパ作動域を短く構成し、簡単、安価な構成とすることができる。
According to the third aspect of the present invention, the
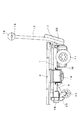
図面に基づいて、移動台車は、モータMによって駆動される左右両側部の後輪11と、前側部には左右両側にキャスタ輪12を配置し、後端部のハンドル13上端には左右両側部に操作グリップ14を有して、この操作グリップ14を把持し前後方向へ押引操作することによってハンドルカバー16内のロードセル15及びコントローラ38を介して前記モータM及び車輪11を駆動し走行することができる。車台1は、前後に長い方形囲桁形態で、この車台1の下側部で左右両側部に前記後輪11、及びキャスタ輪12が配置され、後端部にハンドル13が取付ブラケット17を介して取付けられる。又、図5のようにこのハンドル13は、車台1の前端部の取付ブラケット18にも付替えることができる。車台1の中央側部にはバッテリ19を搭載して、伸縮シリンダ6用の電動モータ5や後輪11駆動用のモータM、操作制御のコントローラ38等の電源としている。
Based on the drawings, the movable carriage has a
前記車台1上に配置する昇降台4は、車幅方向の中央部において、クロスリンク2,3を介して支持されて、このクロスリンク2,3の拡縮によって水平姿勢を維持させた状態で昇降される。各クロスリンク2,3は、左右一対の平行リンク形態で、前後長さ方向の中央部をX字状に交差させて、この交差部に沿う横方向のクロスピン20の周りに回動させて拡縮できる。このクロスリンク2,3の基端部は回動支持部Aとして、クロスリンク2の基(後)端部を車台1の後端部にリンク軸21で枢支し、クロスリンク3の基(後)端部を昇降台4の後端部にリンク軸22で枢支して、これらクロスリンク2,3の基端部をリンク軸21,22の周りに回動自在に支持させる。又、各クロスリンク2,3の先(前)端部には、左右のクロスリンク2,3の先端部間を連結するリンク軸39,40を介して、ガイドロール23,24を設け、クロスリンク2のガイドロール23は、昇降台4の下側に沿って設けたガイドレール25に嵌合させて摺動支持し、クロスリンク3のガイドロール24は、車台1に沿って設けたガイドレール26に嵌合させて摺動支持する形態で、これらガイドレール25,26とガイドロール23,24によりスライド支持部Bを構成するものである。前記ガイドレール25,26は、各クロスリンク2,3のガイドロール23,24に対向して左右両側部に平行配置されて、昇降台4を水平状に支持する。
The
前記昇降台4を昇降するための伸縮シリンダ6は、クロスリンク2の先端部寄り位置のシリンダピン27と、車台1前端部のブラケット28のシリンダピン29との間に連結して、この伸縮シリンダ6のピストン30を油圧力で伸縮させることにより、クロスリンク2,3を拡縮作動することができる。前記伸縮シリンダ6のシリンダピン27側には電動モータ5と筒状のオイルタンク31を一体的に構成し、この伸縮シリンダ6の下側に平行状に沿わせた形態である。このオイルタンク31のオイルを伸縮シリンダ6の油圧回路に供給して、ピストン30を伸縮作動させるものである。
The
前記伸縮シリンダ6の上側に沿ってダンパシリンダ7を配置し、このダンパシリンダ7の前端部をシリンダピン32で前記ブラケット28に枢支している。又、前記ダンパシリンダ7はエア(ガス)ダンパの形態で、スピンドル33が一定の空気(ガス)圧抵抗のもとに伸縮されて、ダンパ機能を有する。このダンパシリンダ7のスピンドル33部の先端部9にはダンパアーム8がリンクピン35で連結されて、このダンパアーム8の先端部を昇降台4の前端部にアームピン34で連結している。前記スピンドル33とダンパアーム8との間のリンクピン35の周りに回転自在のロール36が設けられて、前記ダンパシリンダ7の先端部9として構成する。前記クロスリンク2のシリンダピン27とガイドロール23との間の中間部に、適宜長さのガイドプレート10を形成して、このガイドプレート10の下面を前記先端部9のロール36で受けて、相対的に前後動するガイドプレート10とロール36の間を摺動支持するものである。
A
前記ブラケット28は、車台1前端部の下方に突出して、キャスタ輪12の前側に接近して設けられて、キャスタ輪12のガード機能を有する。このブラケット28に対してシリンダピン29,32で枢支される伸縮シリンダ6とダンパシリンダ7は、図2のように昇降台4が最下降位置にあるとき略平行状となって上下に重合状態に接近する形態に構成する。この状態では、ダンパシリンダ7のダンパアーム8も先端部9のリンクピン35の周りに折り畳まれた形態となって、ダンパシリンダ7の上側に沿った状態となる。このように伸縮シリンダ6とダンパシリンダ7の前下端部のシリンダピン29,32位置を、ブラケット28によってできるだけ低位置に設定することによって、昇降台4の下限位置を低位置に設定することができ、又、これら伸縮シリンダ6やダンパシリンダ7等の伸縮方向の傾斜角度を立てて、昇降台4を上昇させるための上昇出力を行い易くする。
The
前記ダンパシリンダ7は図6のように、左右一対を平行状に配置して、これらダンパシリンダ7やスピンドル33、及びダンパアーム8部等のねじれや、こじれ等を防止して、正確で安定したダンパ作用を行わせることができる。前記クロスリンク2,3の横幅間隔よりも狭く構成された左右一対のダンパアーム8間に、ダンパシリンダ7を平行状に配置して、このダンパシリンダ7のスピンドル33の先端部を、リンクピン35上に並べて軸受けし、これらリンクピン35の中央部にロール36を回転自在に設けてある。
As shown in FIG. 6, the
ここにおいて、車台1上に、基端部の回動支持部Aと先端部のスライド支持部Bを有するクロスリンク2,3を介して昇降可能の昇降台4を支持し、前記クロスリンク2の先端部側とこの下方の車台1との間に、電動モータ5によって伸縮してこれらクロスリンク2,3を拡縮する伸縮シリンダ6を設け、前記クロスリンク2,3の先端部側の昇降台4部と車台1部との間に、この昇降台4の下降位置で前記伸縮シリンダ6と略平行状態となるダンパシリンダ7を設けたことを特徴とする移動台車の昇降台の構成とする。
Here, on the
電動モータ5の駆動によって伸縮シリンダ6を伸縮して、クロスリンク2,3を拡縮し昇降台4を昇降する。この伸縮シリンダ6を縮小させて、クロスリンク2,3を閉縮して昇降台4を最下降位置におくときは、クロスリンク2,3は車台1と昇降台4との間に位置してこれらと平行状態として、この昇降台4の高さを低位置に維持させることができる。この下降位置の昇降台4を前記伸縮シリンダ6の伸出によって上昇するときは、この伸縮シリンダ6の伸出力によって前記クロスリンク2,3が回動支持部Aの周りに回動されると共に、ダンパシリンダ7の弾発力が働いていて、このクロスリンク2,3の開拡回動が補助されて、円滑にリンク回動が行われる。前記伸縮シリンダ6は、クロスリンク2,3が閉縮して、昇降台4が下降された位置にあるときは、これらクロスリンク2,3の方向に沿うように並列重合の形態にあるため、伸縮シリンダ6の伸長力が働いてもクロスリンク2,3の起立回動が行われ難いが、このクロスリンク2,3の起立回動には、伸縮シリンダ6と平行状態にダンパシリンダ7の弾発力が働いているために、これらクロスリンク2,3の起立回動が速やかに、円滑に行われる。
The
前記ダンパシリンダ7は、屈折回動可能のダンパアーム8を介して前記昇降台4の先端部に連結し、クロスリンク2,3の拡縮により上昇時は開拡して昇降台4の先端部を支持し、下降時は閉縮して前記ダンパーアーム8を屈折回動しながらダンパシリンダ7を伸縮シリンダ6と略平行状に重合収納させることを特徴とする。
The
前記のように電動モータ5による伸縮シリンダ6の伸縮によってクロスリンク2,3を拡縮させて、昇降台4を昇降させる。この昇降台4の先端部側はダンパシリンダ7の先端部9に設けられたダンパアーム8によって連結支持される。このダンパシリンダ7の伸縮によるダンパ支持域は比較的短い領域に制限されるが、昇降台4がこのダンパ支持域を越えて高位置に上昇されたときは、ダンパシリンダ7先端部9のダンパアーム8が、屈折回動状態からこのダンパシリンダ7の伸出方向に開いて先端に連結の昇降台4の先端部をダンパ支持する。
As described above, the
前記クロスリンク2の先端部側には、前記ダンパアーム8を連結するダンパシリンダ7の先端部9を摺動案内するガイドプレート10を設けたことを特徴とする。
A
前記のように伸縮シリンダ6の伸縮によって拡縮されるクロスリンク2,3を介して昇降される昇降台4は、この先端部がダンパシリンダ7の先端部9のダンパアーム8によって連結支持されて、ダンパシリンダ7のダンパ有効領域においては、このダンパシリンダ7の先端部9によって、クロスリンク2のガイドプレート10が案内支持されて、このクロスリンク2を介して昇降台4を支持すると共に、このダンパシリンダ7の先端部9と昇降台4の先端部との間のダンパアーム8を介して、この昇降台4の先端部を支持する。そして、更に伸縮シリンダ6の伸長によって昇降台4を高位置へ上昇するときは、このダンパシリンダ7の先端部9が、クロスリンク2のガイドプレート10の摺動域から離反させて、ダンパアーム8を上方へ大きく開いて、昇降台4の先端部をダンパ支持する。又、昇降台4をこの上昇位置から逆に下降させる場合は、これらダンパシリンダ7に対するダンパアーム8の開きが閉じて、このダンパシリンダ7の先端部9をクロスリンク2のガイドプレート10に摺動支持させる(離反点位置に戻す)ことができ、更に、この先端部9をガイドプレート10に摺動させながら、この伸縮シリンダ6の縮小によって昇降台4を下降させることができる。
As described above, the
前記昇降台4は、伸縮シリンダ6の伸縮によって、最下段位置P1(図2)から中段位置P2(図3)を経て最上段位置P3(図4)に亘って昇降される。このときの伸縮シリンダ6、ダンパシリンダ7、ダンパアーム8、及びガイドプレート10等の関係位置が図7によって示される。伸縮シリンダ6が最下段位置P1から中段位置P2にあるときは、ダンパシリンダ7の先端部9のロール36が、クロスリンク2のガイドプレート10の下面に摺接していて、このクロスリンク2を支持することができる状態にある。そして、この中段位置P2にあるときのダンパシリンダ7の先端部9のロール36は、離反点R位置にあって、ガイドプレート10の前端縁部に位置し、昇降台4がこの中段位置P2から更に上昇されると、ロール36がガイドプレート10の前端部から前側へ離間して、クロスリンク2のダンパシリンダ7による支持が開放されて、このダンパシリンダ7のダンパアーム8を介して昇降台4の先端部を支持するものである。又、この昇降台4が最上段位置P3から段位置P2へ下降する工程では、ガイドプレート10の前方に離反していたロール36が、ダンパシリンダ7の先端部9に折畳まれるダンパアーム8の動きによって、下降してくるガイドプレート10の下側へ復帰移動して、このガイドプレート10を摺接支持するものである。
The elevating
1 車台
2 クロスリンク
3 クロスリンク
4 昇降台
5 電動モータ
6 伸縮シリンダ
7 ダンパシリンダ
8 ダンパアーム
9 先端部
10 ガイドプレート
A 回動支持部
B スライド支持部
1
Claims (3)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011216469A JP2013075606A (en) | 2011-09-30 | 2011-09-30 | Platform of movable carriage |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011216469A JP2013075606A (en) | 2011-09-30 | 2011-09-30 | Platform of movable carriage |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2013075606A true JP2013075606A (en) | 2013-04-25 |
| JP2013075606A5 JP2013075606A5 (en) | 2014-10-09 |
Family
ID=48479420
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011216469A Pending JP2013075606A (en) | 2011-09-30 | 2011-09-30 | Platform of movable carriage |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2013075606A (en) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104400750A (en) * | 2014-12-08 | 2015-03-11 | 国家电网公司 | Pipeline valve dismounting assistive tool and pipeline valve dismounting method |
| CN106585699A (en) * | 2016-12-19 | 2017-04-26 | 大唐东北电力试验研究所有限公司 | Mobile bearing eddy current magnetic saturation instrument hydraulic elevating dolly |
| CN109625048A (en) * | 2018-11-28 | 2019-04-16 | 山东职业学院 | A kind of adjustable electrical equipment transport device |
| CN111141932A (en) * | 2019-12-27 | 2020-05-12 | 云南治邦科技有限公司 | Synchronous inductance regulating device for three-stage series resonance reactor |
| CN113428206A (en) * | 2021-07-20 | 2021-09-24 | 深圳市华加思电子有限公司 | A small-size shallow for goods are transported |
| CN116714403A (en) * | 2023-04-20 | 2023-09-08 | 青岛蚂蚁机器人有限责任公司 | AGV obstacle avoidance protection method with self-contractible chassis |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6308404B1 (en) * | 1999-07-12 | 2001-10-30 | Daimlerchrysler Corporation | Apparatus and method for lifting two axles onto a vehicle chassis |
| JP2005170572A (en) * | 2003-12-09 | 2005-06-30 | Paramount Bed Co Ltd | Elevating/lowering device and elevating/lowering bed using the same |
| JP2010274704A (en) * | 2009-05-26 | 2010-12-09 | Atex Co Ltd | Electric small carriage |
-
2011
- 2011-09-30 JP JP2011216469A patent/JP2013075606A/en active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6308404B1 (en) * | 1999-07-12 | 2001-10-30 | Daimlerchrysler Corporation | Apparatus and method for lifting two axles onto a vehicle chassis |
| JP2005170572A (en) * | 2003-12-09 | 2005-06-30 | Paramount Bed Co Ltd | Elevating/lowering device and elevating/lowering bed using the same |
| JP2010274704A (en) * | 2009-05-26 | 2010-12-09 | Atex Co Ltd | Electric small carriage |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104400750A (en) * | 2014-12-08 | 2015-03-11 | 国家电网公司 | Pipeline valve dismounting assistive tool and pipeline valve dismounting method |
| CN106585699A (en) * | 2016-12-19 | 2017-04-26 | 大唐东北电力试验研究所有限公司 | Mobile bearing eddy current magnetic saturation instrument hydraulic elevating dolly |
| CN109625048A (en) * | 2018-11-28 | 2019-04-16 | 山东职业学院 | A kind of adjustable electrical equipment transport device |
| CN111141932A (en) * | 2019-12-27 | 2020-05-12 | 云南治邦科技有限公司 | Synchronous inductance regulating device for three-stage series resonance reactor |
| CN113428206A (en) * | 2021-07-20 | 2021-09-24 | 深圳市华加思电子有限公司 | A small-size shallow for goods are transported |
| CN113428206B (en) * | 2021-07-20 | 2022-03-04 | 深圳市华加思电子有限公司 | A small-size shallow for goods are transported |
| CN116714403A (en) * | 2023-04-20 | 2023-09-08 | 青岛蚂蚁机器人有限责任公司 | AGV obstacle avoidance protection method with self-contractible chassis |
| CN116714403B (en) * | 2023-04-20 | 2024-01-23 | 青岛蚂蚁机器人有限责任公司 | AGV obstacle avoidance protection method with self-contractible chassis |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2013075606A (en) | Platform of movable carriage | |
| US9095740B2 (en) | Tilting and folding device for a treadmill | |
| CN202089725U (en) | Automobile repairing lifting platform | |
| US20100193290A1 (en) | Compact scissors lift | |
| CN106892375A (en) | Scissors elevator with pull-type hydraulic cylinder | |
| JP5529231B2 (en) | Lift device | |
| JP5133674B2 (en) | Fall prevention device | |
| CN105776090A (en) | All-round power working vehicle | |
| WO2017193628A1 (en) | Mobile automobile maintenance station equipped with tailboard scissors lift | |
| JP6117727B2 (en) | Lifting platform device | |
| JP2014105079A (en) | High place work base | |
| CN209853641U (en) | Automobile overhaul elevating platform | |
| JP3156061U (en) | Adjustable lifting platform | |
| JP2010155662A (en) | Jack lifting device | |
| JP5267235B2 (en) | Electric bed with lifting mechanism | |
| CN108657057A (en) | Car transporter | |
| KR100591364B1 (en) | Table lift | |
| JP2528763Y2 (en) | Car maintenance lift | |
| TW200410894A (en) | Vehicle lifting platform used in maintenance | |
| EP2762204A1 (en) | Tilting and folding device for a treadmill | |
| CN210029945U (en) | Variable rotary center turntable for overhead working truck | |
| CN218507496U (en) | Lifting telescopic platform | |
| CN211940791U (en) | Lifting type maintenance platform for acid continuous rolling recoiling machine | |
| CN218465457U (en) | Aerial work platform | |
| CN216785605U (en) | Pit type automobile lifter |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140820 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140820 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140826 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150611 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150616 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20151026 |