JP2012519431A - 3dビデオ処理 - Google Patents
3dビデオ処理 Download PDFInfo
- Publication number
- JP2012519431A JP2012519431A JP2011552290A JP2011552290A JP2012519431A JP 2012519431 A JP2012519431 A JP 2012519431A JP 2011552290 A JP2011552290 A JP 2011552290A JP 2011552290 A JP2011552290 A JP 2011552290A JP 2012519431 A JP2012519431 A JP 2012519431A
- Authority
- JP
- Japan
- Prior art keywords
- image
- motion
- images
- input
- input source
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images













Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/10—Processing, recording or transmission of stereoscopic or multi-view image signals
- H04N13/106—Processing image signals
- H04N13/139—Format conversion, e.g. of frame-rate or size
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/10—Processing, recording or transmission of stereoscopic or multi-view image signals
- H04N13/106—Processing image signals
- H04N13/144—Processing image signals for flicker reduction
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T19/00—Manipulating 3D models or images for computer graphics
- G06T19/20—Editing of 3D images, e.g. changing shapes or colours, aligning objects or positioning parts
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10016—Video; Image sequence
- G06T2207/10021—Stereoscopic video; Stereoscopic image sequence
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N13/10—Processing, recording or transmission of stereoscopic or multi-view image signals
- H04N13/106—Processing image signals
- H04N13/128—Adjusting depth or disparity
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N2013/0074—Stereoscopic image analysis
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N13/00—Stereoscopic video systems; Multi-view video systems; Details thereof
- H04N2013/0074—Stereoscopic image analysis
- H04N2013/0085—Motion estimation from stereoscopic image signals
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N2213/00—Details of stereoscopic systems
- H04N2213/002—Eyestrain reduction by processing stereoscopic signals or controlling stereoscopic devices
Abstract
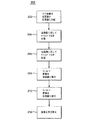
3D入力ソースにおけるモーションジャダーを低減するための方法及び装置が開示される。3D入力ソースは左画像と右画像に分離される。左画像と右画像に対するモーションベクトルが計算される。フレームレート変換が左画像と右画像に実行されて、モーション補償された左画像と右画像が生成される。左画像及び右画像並びにモーション補償された左画像及び右画像は表示のために並び替えられる。代替的には、3D入力ソースにモーション推定及びモーション補償を実行することができ、そして入力画像及びモーション補償された画像は次いでそれぞれの左画像と右画像に分離され得る。方法及び装置は、2D入力ソースから左3D画像と右3D画像を抽出すると共にモーション推定及びモーション補償を実行することによって、2Dから3Dへの変換を実行するように適合させられ得る。
【選択図】図2
Description

Claims (13)
- 3D入力ソースにおけるモーションジャダーを低減するための方法であって、
前記3D入力ソースを左画像及び右画像に分離するステップと、
前記左画像及び前記右画像の各々に対してモーションベクトルを計算するステップと、
前記左画像及び前記右画像にフレームレート変換を実行してモーション補償された左画像及び右画像を生成するステップと、
前記左画像及び右画像並びに前記モーション補償された左画像及び右画像を表示のために並べ替えるステップとを備えた方法。 - 3D入力ソースにおけるモーションジャダーを低減するための方法であって、
前記3D入力ソースに対してモーションベクトルを計算するステップと、
前記3D入力ソースにフレームレート変換を実行してモーション補償された3D画像を生成するステップと、
前記3D入力ソースをそれぞれの左入力画像及び右入力画像に分離すると共に前記モーション補償された3D画像をそれぞれのモーション補償された左画像及び右画像に分離するステップと、
前記左入力画像及び右入力画像並びに前記モーション補償された左画像及び右画像を表示のために並べ替えるステップとを備えた方法。 - 3D入力ソースにおけるモーションジャダーを低減するように構成される装置であって、
3D画像を左画像及び右画像に分離するように構成される3D画像分離デバイスと、
モーションベクトルを計算するように構成されるモーションベクトル計算デバイスと、
入力画像及び前記計算されたモーションベクトルに基きモーション補償された画像を生成するように構成されるフレームレート変換デバイスと、
分離された入力画像及び分離されモーション補償された画像を表示のために並べ替えるように構成される画像並べ替えデバイスとを備えた装置。 - 前記モーションベクトル計算デバイスは分離された左画像及び右画像に動作すると共に前記左画像及び右画像に対してモーションベクトルを計算するように更に構成される請求項3に従う装置。
- 前記フレームレート変換デバイスは前記分離された左画像及び右画像に動作するように更に構成される請求項4に従う装置。
- 前記モーションベクトル計算デバイスは3D画像に動作すると共に前記3D画像に対してモーションベクトルを計算するように更に構成される請求項3に従う装置。
- 前記フレームレート変換デバイスは前記3D画像に動作するように更に構成される請求項6に従う装置。
- 2Dから3Dへの変換を実行するための方法であって、
2D入力ソースから左3D画像及び右3D画像を抽出するステップと、
前記左3D画像及び右3D画像に対してモーションベクトルを計算するステップと、
前記左3D画像及び右3D画像にフレームレート変換を実行してモーション補償された左3D画像及び右3D画像を生成するステップと、
前記左3D画像及び右3D画像並びに前記モーション補償された左3D画像及び右3D画像を表示のために並べ替えるステップとを備えた方法。 - 2Dから3Dへの変換を実行するように構成される装置であって、
2D入力ソースから左3D画像及び右3D画像を抽出するように構成される2Dから3Dへの画像抽出デバイスと、
前記左3D画像及び右3D画像に対してモーションベクトルを計算するように構成されるモーションベクトル計算デバイスと、
前記入力左3D画像及び入力右3D入力画像並びに前記計算されたモーションベクトルに基づきモーション補償された左3D画像及び右3D画像を生成するように構成されるフレームレート変換デバイスと、
前記左3D入力画像及び右3D入力画像並びに前記モーション補償された左3D画像及び右3D画像を表示のために並べ替える画像並べ替えデバイスとを備えた装置。 - 2Dから3Dへの変換を実行するための方法であって、
2D入力ソースに対するモーションベクトルを計算するステップと、
前記2D入力ソースにフレームレート変換を実行してモーション補償された2D画像を生成するステップと、
前記2D入力ソース及び前記モーション補償された2D画像から左3D画像及び右3D画像を抽出するステップとを備えた方法。 - 2Dから3Dへの変換を実行するように構成される装置であって、
モーションベクトルを計算するように構成されるモーションベクトル計算デバイスと、
入力画像及び前記計算されたモーションベクトルに基いてモーション補償された画像を生成するように構成されるフレームレート変換デバイスと、
2D入力ソースから左3D画像及び右3D画像を抽出するように構成される2Dから3Dへの画像抽出デバイスとを備えた装置。 - 前記モーションベクトル計算デバイスは2D入力ソースに動作するように更に構成される請求項11に従う装置。
- 前記2Dから3Dへの画像抽出デバイスは前記2D入力ソース及び前記モーション補償された2D画像から左3D画像及び右3D画像を抽出するように更に構成される請求項12に従う装置。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US12/397,448 US8395709B2 (en) | 2009-03-04 | 2009-03-04 | 3D video processing |
| US12/397,448 | 2009-03-04 | ||
| PCT/CA2010/000307 WO2010099616A1 (en) | 2009-03-04 | 2010-03-04 | 3d video processing |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012519431A true JP2012519431A (ja) | 2012-08-23 |
| JP2012519431A5 JP2012519431A5 (ja) | 2013-04-18 |
Family
ID=42677898
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011552290A Pending JP2012519431A (ja) | 2009-03-04 | 2010-03-04 | 3dビデオ処理 |
Country Status (6)
| Country | Link |
|---|---|
| US (2) | US8395709B2 (ja) |
| EP (2) | EP3512196B1 (ja) |
| JP (1) | JP2012519431A (ja) |
| KR (1) | KR20120006498A (ja) |
| CN (1) | CN102362503A (ja) |
| WO (1) | WO2010099616A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012222425A (ja) * | 2011-04-05 | 2012-11-12 | Sumitomo Electric Ind Ltd | 映像再生装置 |
Families Citing this family (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102474641B (zh) * | 2009-07-07 | 2015-05-13 | Lg电子株式会社 | 用于显示三维用户界面的方法 |
| JP2011223493A (ja) * | 2010-04-14 | 2011-11-04 | Canon Inc | 画像処理装置および画像処理方法 |
| CA2855190C (en) | 2011-10-05 | 2017-02-07 | Bitanimate, Inc. | Resolution enhanced 3d video rendering systems and methods |
| WO2013151291A1 (ko) * | 2012-04-02 | 2013-10-10 | 삼성전자 주식회사 | 화질 개선을 위한 다중시점 영상 디스플레이 장치 및 그 방법 |
| CN104486611A (zh) * | 2014-12-29 | 2015-04-01 | 北京极维客科技有限公司 | 一种图像转换方法及装置 |
| US10200666B2 (en) * | 2015-03-04 | 2019-02-05 | Dolby Laboratories Licensing Corporation | Coherent motion estimation for stereoscopic video |
| US10410358B2 (en) * | 2017-06-26 | 2019-09-10 | Samsung Electronics Co., Ltd. | Image processing with occlusion and error handling in motion fields |
| US10523947B2 (en) | 2017-09-29 | 2019-12-31 | Ati Technologies Ulc | Server-based encoding of adjustable frame rate content |
| US10594901B2 (en) | 2017-11-17 | 2020-03-17 | Ati Technologies Ulc | Game engine application direct to video encoder rendering |
| US11290515B2 (en) | 2017-12-07 | 2022-03-29 | Advanced Micro Devices, Inc. | Real-time and low latency packetization protocol for live compressed video data |
| US11100604B2 (en) | 2019-01-31 | 2021-08-24 | Advanced Micro Devices, Inc. | Multiple application cooperative frame-based GPU scheduling |
| US11418797B2 (en) | 2019-03-28 | 2022-08-16 | Advanced Micro Devices, Inc. | Multi-plane transmission |
| US11488328B2 (en) | 2020-09-25 | 2022-11-01 | Advanced Micro Devices, Inc. | Automatic data format detection |
| CN117078666B (zh) * | 2023-10-13 | 2024-04-09 | 东声(苏州)智能科技有限公司 | 二维和三维结合的缺陷检测方法、装置、介质和设备 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01171389A (ja) * | 1987-12-25 | 1989-07-06 | Sharp Corp | 映像再生装置 |
| JP2000209614A (ja) * | 1999-01-14 | 2000-07-28 | Sony Corp | 立体映像システム |
| JP2003304507A (ja) * | 2002-04-10 | 2003-10-24 | Sony Corp | 動きベクトル検出装置及び方法 |
| JP2006157605A (ja) * | 2004-11-30 | 2006-06-15 | Furoobell:Kk | 映像処理システムおよび方法、撮像装置および方法、映像処理装置、映像データ出力方法、記録媒体、並びにプログラム |
Family Cites Families (24)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4925294A (en) * | 1986-12-17 | 1990-05-15 | Geshwind David M | Method to convert two dimensional motion pictures for three-dimensional systems |
| AUPN732395A0 (en) * | 1995-12-22 | 1996-01-25 | Xenotech Research Pty Ltd | Image conversion and encoding techniques |
| AUPO894497A0 (en) * | 1997-09-02 | 1997-09-25 | Xenotech Research Pty Ltd | Image processing method and apparatus |
| CN1236628C (zh) * | 2000-03-14 | 2006-01-11 | 株式会社索夫特4D | 产生立体图像的方法和装置 |
| US20030112873A1 (en) * | 2001-07-11 | 2003-06-19 | Demos Gary A. | Motion estimation for video compression systems |
| CA2380105A1 (en) | 2002-04-09 | 2003-10-09 | Nicholas Routhier | Process and system for encoding and playback of stereoscopic video sequences |
| US7068722B2 (en) * | 2002-09-25 | 2006-06-27 | Lsi Logic Corporation | Content adaptive video processor using motion compensation |
| US20040252756A1 (en) * | 2003-06-10 | 2004-12-16 | David Smith | Video signal frame rate modifier and method for 3D video applications |
| US20080246836A1 (en) * | 2004-09-23 | 2008-10-09 | Conversion Works, Inc. | System and method for processing video images for camera recreation |
| KR100716992B1 (ko) * | 2005-02-04 | 2007-05-10 | 삼성전자주식회사 | 스테레오 영상 부호화 및 복호화 방법과 그 장치 |
| KR101227601B1 (ko) * | 2005-09-22 | 2013-01-29 | 삼성전자주식회사 | 시차 벡터 예측 방법, 그 방법을 이용하여 다시점 동영상을부호화 및 복호화하는 방법 및 장치 |
| US8644386B2 (en) * | 2005-09-22 | 2014-02-04 | Samsung Electronics Co., Ltd. | Method of estimating disparity vector, and method and apparatus for encoding and decoding multi-view moving picture using the disparity vector estimation method |
| KR100653200B1 (ko) * | 2006-01-09 | 2006-12-05 | 삼성전자주식회사 | 기하 정보를 교정하여 파노라마 영상을 제공하는 방법 및장치 |
| US8842730B2 (en) * | 2006-01-27 | 2014-09-23 | Imax Corporation | Methods and systems for digitally re-mastering of 2D and 3D motion pictures for exhibition with enhanced visual quality |
| CA2653815C (en) * | 2006-06-23 | 2016-10-04 | Imax Corporation | Methods and systems for converting 2d motion pictures for stereoscopic 3d exhibition |
| JP4181593B2 (ja) * | 2006-09-20 | 2008-11-19 | シャープ株式会社 | 画像表示装置及び方法 |
| JP4513819B2 (ja) * | 2007-03-19 | 2010-07-28 | 株式会社日立製作所 | 映像変換装置、映像表示装置、映像変換方法 |
| JP4958610B2 (ja) * | 2007-04-06 | 2012-06-20 | キヤノン株式会社 | 画像防振装置、撮像装置及び画像防振方法 |
| KR101427115B1 (ko) * | 2007-11-28 | 2014-08-08 | 삼성전자 주식회사 | 영상처리장치 및 영상처리방법 |
| JP2009135686A (ja) * | 2007-11-29 | 2009-06-18 | Mitsubishi Electric Corp | 立体映像記録方法、立体映像記録媒体、立体映像再生方法、立体映像記録装置、立体映像再生装置 |
| WO2009072273A1 (ja) * | 2007-12-04 | 2009-06-11 | Panasonic Corporation | 映像信号処理装置 |
| CN101933335B (zh) * | 2008-01-29 | 2012-09-05 | 汤姆森特许公司 | 将二维图像数据转换为立体图像数据的方法和系统 |
| US20090268097A1 (en) * | 2008-04-28 | 2009-10-29 | Siou-Shen Lin | Scene change detection method and related apparatus according to summation results of block matching costs associated with at least two frames |
| KR101545510B1 (ko) * | 2008-12-24 | 2015-08-20 | 삼성전자주식회사 | 프레임 속도 조절이 가능한 2차원 영상 또는 3차원 영상 디스플레이 방법 및 장치 |
-
2009
- 2009-03-04 US US12/397,448 patent/US8395709B2/en active Active
-
2010
- 2010-03-04 WO PCT/CA2010/000307 patent/WO2010099616A1/en active Application Filing
- 2010-03-04 KR KR1020117023309A patent/KR20120006498A/ko active Search and Examination
- 2010-03-04 JP JP2011552290A patent/JP2012519431A/ja active Pending
- 2010-03-04 EP EP18210059.4A patent/EP3512196B1/en active Active
- 2010-03-04 CN CN2010800131135A patent/CN102362503A/zh active Pending
- 2010-03-04 EP EP10748268.9A patent/EP2404452B1/en active Active
-
2013
- 2013-03-05 US US13/785,274 patent/US9270969B2/en active Active
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH01171389A (ja) * | 1987-12-25 | 1989-07-06 | Sharp Corp | 映像再生装置 |
| JP2000209614A (ja) * | 1999-01-14 | 2000-07-28 | Sony Corp | 立体映像システム |
| JP2003304507A (ja) * | 2002-04-10 | 2003-10-24 | Sony Corp | 動きベクトル検出装置及び方法 |
| JP2006157605A (ja) * | 2004-11-30 | 2006-06-15 | Furoobell:Kk | 映像処理システムおよび方法、撮像装置および方法、映像処理装置、映像データ出力方法、記録媒体、並びにプログラム |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012222425A (ja) * | 2011-04-05 | 2012-11-12 | Sumitomo Electric Ind Ltd | 映像再生装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| EP2404452B1 (en) | 2018-12-05 |
| US20130182069A1 (en) | 2013-07-18 |
| WO2010099616A1 (en) | 2010-09-10 |
| CN102362503A (zh) | 2012-02-22 |
| EP3512196A1 (en) | 2019-07-17 |
| EP2404452A1 (en) | 2012-01-11 |
| EP3512196B1 (en) | 2021-09-01 |
| KR20120006498A (ko) | 2012-01-18 |
| EP2404452A4 (en) | 2013-10-09 |
| US20100225741A1 (en) | 2010-09-09 |
| US9270969B2 (en) | 2016-02-23 |
| US8395709B2 (en) | 2013-03-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2012519431A (ja) | 3dビデオ処理 | |
| TWI432017B (zh) | 用於移動補償畫面速率轉換器之系統與方法 | |
| US8441521B2 (en) | Method and apparatus for determining view of stereoscopic image for stereo synchronization | |
| EP2728887B1 (en) | Image processing apparatus and image processing method thereof | |
| US8243194B2 (en) | Method and apparatus for frame interpolation | |
| US10412462B2 (en) | Video frame rate conversion using streamed metadata | |
| KR20090071624A (ko) | 이미지 개선 | |
| KR101666019B1 (ko) | 외삽 뷰 생성을 위한 장치 및 방법 | |
| JP2010062695A (ja) | 画像処理装置、および画像処理方法、並びにプログラム | |
| JP5257248B2 (ja) | 画像処理装置および方法、ならびに画像表示装置 | |
| US20170127039A1 (en) | Ultrasonic proximity detection system | |
| EP2161687B1 (en) | Video signal processing device, video signal processing method, and video signal processing program | |
| US20130069934A1 (en) | System and Method of Rendering Stereoscopic Images | |
| KR20060083978A (ko) | 움직임 벡터 필드 리-타이밍 | |
| US9798919B2 (en) | Method and apparatus for estimating image motion using disparity information of a multi-view image | |
| EP1863283A1 (en) | A method and apparatus for frame interpolation | |
| JP2004356747A (ja) | 画像のマッチング方法および装置 | |
| KR101050135B1 (ko) | 광류 정보를 이용한 중간 영상 생성 방법 | |
| US8330799B2 (en) | Image output apparatus and image output method | |
| Yao et al. | View synthesis based on background update with gaussian mixture model | |
| TWI590663B (zh) | 影像處理裝置及其影像處理方法 | |
| JP5977964B2 (ja) | 多視点映像フレーム内挿装置、方法及びプログラム | |
| JP6504708B2 (ja) | 前景領域における被写体の重なりを識別する識別装置、識別方法及びコンピュータ可読記憶媒体 | |
| US20130076859A1 (en) | Method and apparatus for detecting motion vector, and method and apparatus for processing image signal | |
| Shin et al. | Autostereoscopic 3D video generation from stereoscopic videos using FPGA and GPU |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130304 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130304 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140123 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140129 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20140428 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20140508 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20140529 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20140605 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140630 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20141028 |