JP2012243444A - Vacuum interrupter - Google Patents
Vacuum interrupter Download PDFInfo
- Publication number
- JP2012243444A JP2012243444A JP2011110163A JP2011110163A JP2012243444A JP 2012243444 A JP2012243444 A JP 2012243444A JP 2011110163 A JP2011110163 A JP 2011110163A JP 2011110163 A JP2011110163 A JP 2011110163A JP 2012243444 A JP2012243444 A JP 2012243444A
- Authority
- JP
- Japan
- Prior art keywords
- magnetic
- electrode
- magnetic body
- shaped
- shape
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images











Landscapes
- High-Tension Arc-Extinguishing Switches Without Spraying Means (AREA)
Abstract
Description
本発明は、縦磁界発生用の手段として磁性体を設けた真空インタラプタに関する。 The present invention relates to a vacuum interrupter provided with a magnetic material as means for generating a longitudinal magnetic field.
従来より、遮断性能を上げるために、接点間に発生するアークに対して平行な磁界を発生させる、いわゆる縦磁界電極を組み込んだ真空インタラプタが採用されている。 Conventionally, in order to improve the interruption performance, a vacuum interrupter incorporating a so-called longitudinal magnetic field electrode that generates a magnetic field parallel to an arc generated between contacts has been employed.
この縦磁界電極は、一般的に、接点となる接触子の背面に設けたコイル電極やスリット入り電極に流れる電流により発生する磁界を利用している。一方、接点となる平板電極の背面に接続された通電軸に流れる電流により発生する磁界を、通電軸の周囲に設けた磁性体によって接点間に導くことにより、縦磁界を発生させる構成も知られている。 The longitudinal magnetic field electrode generally uses a magnetic field generated by a current flowing in a coil electrode or a slit electrode provided on the back surface of a contactor serving as a contact. On the other hand, a configuration is also known in which a longitudinal magnetic field is generated by guiding a magnetic field generated by a current flowing through a current-carrying shaft connected to the back surface of a plate electrode serving as a contact between magnetic contacts provided around the current-carrying shaft. ing.
このような磁性体を設ける構成として、図4に示すように、対向配置されるそれぞれの電極50、51の背面に馬蹄形(U字形)の磁性体52、53を設けたタイプの真空インタラプタが知られている。2つの磁性体52、53は通電軸の周囲を各々約180度超ずつ、例えば200度程度覆うように形成されるとともに、互いを約180度ずらした位置に配置されている。磁性体52、53は2つ合わせて通電軸の周囲を360度以上覆う形となるため、磁性体52、53の端部同士は一部ラップするように配置される。このため磁性体ラップ箇所の磁気抵抗が下がり、磁力線が通過しやすくなっている。(例えば特許文献1参照。)
As a configuration in which such a magnetic body is provided, a vacuum interrupter of a type in which horseshoe-shaped (U-shaped)
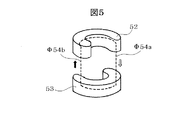
図5は図4の真空インタラプタの磁性体のみを取り出し、磁性体を通る磁力線により形成される磁気経路を示した図である。この図5に示すように、磁性体52、53を通過する磁力線Φ54(以下「ループ」と称す。)が2回電極間(以下「ギャップ」と称する。)を通過する。ここでは磁性体52、53のラップ箇所を通過する磁力線を1本のループΦ54で示しているが、実際にはループΦ54の周囲には縦方向の磁束が発生している。このような構成によれば、ギャップには図6に模式的に示すように、磁束密度が一定以上の双極の範囲(点線部)が形成される。即ち、磁性体のラップ部であるため磁気抵抗が低く磁束密度が高くなっているループΦ54の磁気経路Φ54a、Φ54bを中心として、その周囲に磁束密度が一定以上の略円状の範囲が2箇所形成される。ここで一定以上の磁束密度とは、遮断性能に寄与する程度の磁束密度を指す。
FIG. 5 is a view showing a magnetic path formed by magnetic lines of force passing through the magnetic body by taking out only the magnetic body of the vacuum interrupter of FIG. As shown in FIG. 5, a magnetic force line Φ54 (hereinafter referred to as “loop”) passing through the
さらに図7に示すように、対向配置される電極55、56のそれぞれの背面に2つずつ円弧形の磁性体57、58および59、60を設けた四重極タイプの真空インタラプタも知られている。電極55の背面に設けられた磁性体57、58は通電軸の周囲を各々約90度超、例えば110度程度覆うように形成されるとともに、互いに約180度ずらして配置されている。さらに、電極56の背面には磁性体57、58と同一形状でかつこれらの磁性体とそれぞれ約90度ずらした位置に、磁性体59、60を配置している。即ち磁性体57、59、60の端部同士を一部ラップさせるように配置すると共に、磁性体58、59、60端部同士もラップさせることで、それぞれのラップ箇所の磁気抵抗が下がり、磁力線が通過しやすくなっている。(例えば特許文献2参照。)
Further, as shown in FIG. 7, a quadrupole type vacuum interrupter is also known, in which two arc-shaped
この構造においては図8に示すように、4つの磁性体を通過するループΦ61が4回ギャップを通過する。具体的には、磁性体57、59、58、60の順にループΦ61が通過する。ここでも磁力線は各々の磁性体のラップ箇所を通過する1本のループΦ61で示しているが、実際にはループΦ61の周囲には縦方向の磁束が発生している。このような構成によれば、ギャップには図9に模式的に示すように、磁束密度が一定以上の四重極の範囲(点線部)が形成される。即ち、磁性体のラップ部のため磁気抵抗が低く磁束密度が高くなっているループΦ61の磁気経路Φ61a、Φ61b、Φ61c、Φ61dを中心として、その周囲に磁束密度が一定以上の略円状の範囲が4箇所形成される。
In this structure, as shown in FIG. 8, the loop Φ61 passing through the four magnetic bodies passes through the gap four times. Specifically, the loop Φ61 passes through the
縦磁界の効果を増加させ、遮断性能を向上するためには、電極径方向全体での磁束の密度分布が均一であること、磁界の強度が強いことが求められている。しかしながら、上述の馬蹄形タイプの真空インタラプタでは、1本のループあたり2箇所でギャップを通過するので、磁気抵抗の低下については抑えられる一方、電極上には磁束密度が一定以上の略円状の範囲が2つ形成されるのみである。このため、電極の径方向に対して均一な磁束密度分布が得られないという問題があった。 In order to increase the effect of the longitudinal magnetic field and improve the interruption performance, it is required that the magnetic flux density distribution is uniform throughout the electrode radial direction and that the magnetic field strength is strong. However, since the horseshoe-shaped vacuum interrupter described above passes through the gap at two locations per loop, it is possible to suppress a decrease in the magnetic resistance, but on the electrode, a substantially circular range in which the magnetic flux density is a certain level or more. Only two are formed. For this reason, there has been a problem that a uniform magnetic flux density distribution cannot be obtained in the radial direction of the electrode.
また、四重極タイプの真空インタラプタでは、1本のループあたり4回ギャップを通過することで、電極上には磁束密度分布が一定以上の略円状の範囲が4つ形成され、馬蹄形タイプに比べて電極全体への磁束密度の分布は改善される。しかし、電極上で隣り合う磁気経路Φ61a、Φ61b、Φ61c、Φ61dは互いに磁力線の進行方向が異なるため、各磁気経路の周囲には各々独立し、且つ磁束密度が一定以上の略円状の範囲が4つ形成されることになる。即ち、磁束密度が一定以上の4つの略円状の範囲間には、その略円状の範囲が重ならず、磁束密度の低い空間ができる。このため電極全体における磁束密度分布の均一性についてなお問題が残る。 Also, in the quadrupole type vacuum interrupter, by passing through the gap four times per loop, four substantially circular areas having a certain magnetic flux density distribution or more are formed on the electrode, and the horseshoe type is formed. In comparison, the distribution of magnetic flux density over the entire electrode is improved. However, the magnetic paths Φ61a, Φ61b, Φ61c, and Φ61d that are adjacent on the electrode have different magnetic flux lines, so that there are substantially circular ranges around the magnetic paths that are independent and have a magnetic flux density of a certain level or more. Four will be formed. That is, between the four substantially circular ranges having a certain magnetic flux density or more, the substantially circular ranges do not overlap, and a space with a low magnetic flux density is formed. For this reason, the problem still remains about the uniformity of magnetic flux density distribution in the whole electrode.
さらには、1本のループあたり4回ギャップを通過するので、磁気経路の磁気抵抗が増加する。このため、縦磁界電極の軸方向の磁束密度が低下し、強力な磁界を得ることができないという問題があった。 Further, since the gap is passed four times per loop, the magnetic resistance of the magnetic path is increased. For this reason, the magnetic flux density in the axial direction of the longitudinal magnetic field electrode is lowered, and there is a problem that a strong magnetic field cannot be obtained.
上記課題を解決するために本発明は、縦磁界電極の磁束密度分布および磁界強度を改善することにより、遮断性能を向上させた真空インタラプタを提供することを目的とする。 In order to solve the above-described problems, an object of the present invention is to provide a vacuum interrupter with improved interruption performance by improving the magnetic flux density distribution and magnetic field strength of a longitudinal magnetic field electrode.
上記目的を達成するために、本発明の真空インタラプタは、向かい合う一対の電極の背面にそれぞれ通電軸を有し、当該各通電軸の周囲に磁性体を設けた真空インタラプタにおいて、一方の電極の背面から前記通電軸の軸方向に所定の距離を保って配置された、U字形でかつ該U字の両端部から前記通電軸の軸方向に伸びた柱状部が前記電極と当接する磁性体と、他方の電極の背面に当接した、円弧形でかつその両端部が前記U字形磁性体の柱状部の軸方向の延長線上に位置する磁性体とを1組として第一の磁気経路を形成し、さらに前記U字形および円弧形を1組とする磁性体と同一形状のもう1組の磁性体を、それぞれ対向する電極の背面に約180度ずらして配置し、第二の磁気経路を形成したことを特徴とする。 In order to achieve the above object, a vacuum interrupter according to the present invention has a current-carrying shaft on the back surface of a pair of electrodes facing each other, and a vacuum interrupter in which a magnetic material is provided around each current-carrying shaft. A magnetic body disposed at a predetermined distance in the axial direction of the current-carrying shaft and having a U-shape and a columnar portion extending in the axial direction of the current-carrying shaft from both ends of the U-shape, A first magnetic path is formed with a pair of magnetic bodies that are in contact with the back surface of the other electrode and are arc-shaped and whose both ends are positioned on the extension line in the axial direction of the columnar portion of the U-shaped magnetic body. In addition, another set of magnetic bodies having the same shape as the U-shaped and arc-shaped sets of magnetic bodies are arranged on the back surfaces of the opposing electrodes with a shift of about 180 degrees, and the second magnetic path is arranged. It is formed.
向かい合う一対の電極の一方の背面に配置されるU字形および他方の背面に配置される円弧形の1組の磁性体によって磁気経路を形成するとともに、当該2つ1組の磁性体と同一形状のもう1組の磁性体を、それぞれ対向する電極の背面に約180度ずらして配置したため、計2箇所にループが形成されることにより電極径方向の磁束密度分布が改善される。さらにギャップの通過回数が1ループあたり2回に抑えられるので、強い磁界強度を得ることができ、遮断性能を向上することができる。 A magnetic path is formed by a pair of magnetic bodies of a U shape disposed on one back surface of a pair of electrodes facing each other and an arc shape disposed on the other back surface, and has the same shape as the pair of magnetic bodies. Since the other pair of magnetic bodies are arranged with a shift of about 180 degrees on the back surfaces of the electrodes facing each other, a loop is formed at a total of two locations, thereby improving the magnetic flux density distribution in the electrode radial direction. Furthermore, since the number of times the gap passes can be suppressed to twice per loop, a strong magnetic field strength can be obtained, and the blocking performance can be improved.
以下、本発明の実施の形態を図を参照して説明する。図1において、図示しない真空バルブの固定側端板に貫設された固定側通電軸1Aの下端には、円板状に形成された電極2Aがろう付けされている。電極2Aは遮断性能および通電性能に優れた部材、例えば銅−クロム材によって形成されている。
Hereinafter, embodiments of the present invention will be described with reference to the drawings. In FIG. 1, a disk-shaped
図1、図2に示すように、電極2Aの背面に当接するように円弧形磁性体3Aが配置されている。さらに円弧形磁性体3Aから通電軸1Aの軸線方向に所定の距離を保った位置に、通電軸1Aを周方向に覆うようなU字形でかつ両端部(開極部)に柱状部4aを有するU字形磁性体4Aが配置されている。ここで、所定の距離としては、後述する2つの磁気経路Φ5、Φ6が互いに干渉しないために、ギャップと同等以上の距離を持たせることが望ましい。
As shown in FIGS. 1 and 2, the arc-shaped
柱状部4aは通電軸1Aの軸方向で、かつ電極2A側(図中下方)に伸びており、その下端が電極2Aと当接している。なお、円弧形磁性体3AおよびU字形磁性体4Aは、通電軸1Aの周囲を各々約90度超(例えば110度程度)、270度超(例えば290度程度)ずつ覆うように形成されている。
The
同様に、図1において、図示しない真空バルブの可動側端板に貫設された可動側通電軸1Bの上端にも、可動側と同一形状の電極2Bがろう付けされている。電極2Bの背面には、図1、図2に示すように可動側の円弧形磁性体3Aと同一形状の円弧形磁性体3Bが電極2Bと当接するように配置されている。この円弧形磁性体3Bはその両端部が、可動側のU字形磁性体4Aの柱状部4aの軸方向の延長線上に位置するように配置されている。
Similarly, in FIG. 1, an
さらに、円弧形磁性体3Bから通電軸1Bの軸方向に所定の距離を保った位置に、U字形磁性体4Aと同一形状のU字形磁性体4Bが配置されている。このU字形磁性体4Bの柱状部4bは通電軸1Bの軸線方向でかつ電極2B側(図中上方)に伸びており、その上端が電極2Bと当接している。さらに、柱状部4bの軸線方向の延長線上に、可動側の円弧形磁性体3Aの両端が位置するように配置されている。
Further, a U-shaped
上述したように、対向する可動側電極2Aおよび固定側電極2Bの背面には、それぞれ同一形状の円弧形磁性体3A、3BおよびU字形磁性体4A、4Bが互いに約180度ずらした状態で配置されている。また、通電軸1の周囲を円弧形磁性体3は90度超、U字型磁性体4は270度超程度覆うように形成しているので、2つの磁性体3、4を合わせて通電軸1の周囲を360度以上覆う形となる。このため、例えば円弧形磁性体3BとU字型磁性体4Aは互いにその両端がラップするように配置される。よって、磁性体のラップ箇所において磁気抵抗が下がり、磁力線が通過しやすくなるので、所定のループが形成されやすくなる。
As described above, the arc-shaped
これらの各磁性体は、電極および通電軸にろう付けもしくはねじ止めによって固定される。なお、固定側、可動側で磁性体の固定方法は同一のため、ここでは、一方の電極の背面に設けられた磁性体の固定方法のみ説明する。 Each of these magnetic bodies is fixed to the electrode and the current-carrying shaft by brazing or screwing. Since the fixing method of the magnetic body is the same on the fixed side and the movable side, only the fixing method of the magnetic body provided on the back surface of one electrode will be described here.
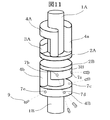
ねじ止めの場合、図11、図12に示すように円弧形磁性体3BおよびU字形磁性体4Bに複数箇所形成した貫通孔7と、それと対応するように通電軸1Aに形成したねじ穴8にねじ9を螺合させる。本実施例では、円弧形磁性体3Bに2箇所の貫通孔7a、7bを設け、通電軸1Bにはこれらと対応するねじ穴8a、8bを形成し、ねじ9を螺合させることでねじ止めを行っている。
In the case of screwing, as shown in FIGS. 11 and 12, through holes 7 formed in a plurality of locations in the arc-shaped
一方、U字形磁性体4Bには3箇所の貫通孔7c、7d、7eを設け、通電軸1Bにはこれらと対応する8c、8d、8eを形成し、ねじ9を螺合させてねじ止めを行う。これにより円弧形磁性体3BおよびU字形磁性体4Bを、通電軸1Bと一体化し固定する。
On the other hand, the U-shaped
ろう付け固定の場合、図13に示すように、円弧形磁性体3Aと電極2Aとの当接面にろう材10を設ける。さらに、円弧形磁性体3Aと通電軸1Aとの周方向の当接部にろう材11を挟み込むことで、円弧形磁性体3Aを電極2Aおよび通電軸1Aにろう付け固定する。
In the case of brazing and fixing, a
一方、U字形磁性体4Aと電極2Aとの当接面、即ち柱状部4aの先端部と電極2Aとの当接面にろう材12を設ける。さらに、U字形磁性体4AのU字形状部で、かつ通電軸1Aとの周方向の当接部にろう材13を挟み込むことで、電極2Aと通電軸1Aにろう付け固定を行う。
On the other hand, the
次に、上述の磁性体配置による磁気経路および電極径方向の磁束密度分布につき説明する。図2では、通電時に各磁性体を磁力線が通過することで形成される磁気経路を点線で示している。図の矢印で示す通り、円弧形磁性体3Aを通る磁力線はギャップを通過した後、U字形磁性体4Bに至り、さらに円弧形磁性体3Aへ戻ることで、ループΦ5を形成している。
Next, the magnetic path and the magnetic flux density distribution in the electrode radial direction by the above-described magnetic material arrangement will be described. In FIG. 2, a magnetic path formed by passing a magnetic line of force through each magnetic body when energized is indicated by a dotted line. As indicated by the arrows in the figure, the magnetic field lines passing through the arc-shaped
また、U字形磁性体4Aを通る磁力線は、ギャップを通過した後、円弧形磁性体3Bに至り、さらにU字形磁性体4Aへ戻ることでループΦ6を形成している。ここでは磁気経路はそれぞれ1本ずつのループΦ5、Φ6で示しているが、実際にはループΦ5、Φ6の周囲に縦方向の磁束が発生している。
Further, the magnetic field lines passing through the U-shaped
このような構成によれば、ギャップには図3に模式的に示すように、磁束密度が一定以上の範囲(点線部)が形成される。即ち、磁性体3、4のラップ部であるため磁気抵抗が低く磁束密度が高くなっているループΦ5、6の磁気経路Φ5a、Φ6aおよびΦ5b、Φ6bを中心として、その周囲に磁束密度が一定以上の略長円状の範囲が2箇所形成される。また、本構成では、隣り合う磁気経路Φ5a、Φ6aおよびΦ5b、Φ6bの磁力線の進行方向が同一のため、磁束密度が一定以上の範囲が四重極タイプのように独立に形成されることなく、互いに合わさるように広がる。このため、2つのループΦ5、Φ6を中心として分布する磁束密度が一定以上の範囲は長円状となり、磁束密度分布が電極上を左右対称に均一に広がる。 According to such a configuration, as schematically shown in FIG. 3, a range (dotted line portion) where the magnetic flux density is a certain level or more is formed in the gap. That is, the magnetic flux density is more than a certain value around the magnetic paths Φ5a, Φ6a and Φ5b, Φ6b of the loops Φ5, Φ6, which have a low magnetic resistance and a high magnetic flux density because they are the wrap portions of the magnetic bodies 3, 4. Are formed in two places. Further, in this configuration, the magnetic flux lines in the adjacent magnetic paths Φ5a, Φ6a and Φ5b, Φ6b have the same traveling direction, so that the range of the magnetic flux density is not independently formed as in the quadrupole type, Spread to fit each other. For this reason, the range in which the magnetic flux density distributed around the two loops Φ5 and Φ6 is a certain value or more is an oval shape, and the magnetic flux density distribution is spread evenly symmetrically on the electrode.
次に、本発明の縦磁界電極における磁界強度を、従来の四重極タイプ電極と比較して説明する。 Next, the magnetic field strength in the longitudinal magnetic field electrode of the present invention will be described in comparison with a conventional quadrupole type electrode.
磁界強度は、起磁力/磁気抵抗で求められる。起磁力は通電軸の周囲に発生する磁束により得られる力であり、磁性体によってギャップ間に導かれる。図8の四重極タイプでは起磁力は1本のループΦ61に導かれる。一方、図2の本発明においては各々の通電軸1A、1Bの周囲に同等の力で発生する起磁力を2本のループΦ6、Φ5にそれぞれ導く。
The magnetic field strength is obtained by magnetomotive force / magnetic resistance. The magnetomotive force is a force obtained by the magnetic flux generated around the current-carrying shaft and is guided between the gaps by the magnetic material. In the quadrupole type of FIG. 8, the magnetomotive force is guided to one loop Φ61. On the other hand, in the present invention shown in FIG. 2, magnetomotive forces generated with the same force around the respective energizing
磁気経路全体の磁気抵抗はギャップ間距離をg、接触子の厚さをdとするとg+2dに比例する。なお、接触子には非磁性材料が使われており、この部分の磁気抵抗は無視できる。 The magnetoresistance of the entire magnetic path is proportional to g + 2d, where g is the gap distance and d is the contact thickness. Note that a non-magnetic material is used for the contact, and the magnetic resistance of this portion can be ignored.
四重極タイプは1本のループあたり4回ギャップを通過するため、磁気抵抗は4(g+2d)に比例する。一方本発明の場合、電極全体として2本のループあたり4回ギャップを通過する。即ち、1本のループあたりギャップを通過する回数は2回であり、磁気抵抗は2(g+2d)に比例する。各通電軸に発生する起磁力の条件を同じにした場合において、本発明の場合、磁気抵抗は四重極タイプの1/2となるため、より強い磁界強度を得ることが出来る。 Since the quadrupole type passes through the gap four times per loop, the magnetic resistance is proportional to 4 (g + 2d). On the other hand, in the case of the present invention, the entire electrode passes through the gap four times per two loops. That is, the number of passes through the gap per loop is two, and the magnetoresistance is proportional to 2 (g + 2d). In the case of the present invention, when the conditions of magnetomotive force generated in each energizing shaft are the same, the magnetic resistance is ½ of the quadrupole type, so that a stronger magnetic field strength can be obtained.
図10はギャップ長を30mmとした場合の、従来と本発明の真空インタラプタの電極上の軸方向磁束密度分布を比較した図である。縦軸は軸方向の磁束密度、横軸は電極の径方向の距離を示している。また、曲線C〜Eはそれぞれ図9に示す四重極タイプ、図6に示す馬蹄形タイプおよび図3に示す本実施例における真空インタラプタの電極を径方向に切り出した部分の磁束密度を示す。 FIG. 10 is a diagram comparing axial magnetic flux density distributions on the electrodes of the vacuum interrupter of the present invention and the conventional one when the gap length is 30 mm. The vertical axis represents the magnetic flux density in the axial direction, and the horizontal axis represents the distance in the radial direction of the electrode. Curves C to E respectively show the magnetic flux densities of the quadrupole type shown in FIG. 9, the horseshoe type shown in FIG. 6, and the portion of the vacuum interrupter electrode shown in FIG. 3 cut out in the radial direction.
電極部(30〜70mm)の範囲をみると、四重極タイプCの磁束密度の最大値が0.004T程度であるのに対し、馬蹄形タイプDおよび本実施例Eの電極最大磁束密度は0.012〜0.013T程度であり、磁束密度が高くなっていることが分かる。即ち、ギャップ間においてより強い磁界強度が得られていることを意味する。 Looking at the range of the electrode part (30 to 70 mm), the maximum value of the magnetic flux density of the quadrupole type C is about 0.004T, whereas the maximum magnetic flux density of the horseshoe type D and the example E is 0. It is about .012 to 0.013 T, and it can be seen that the magnetic flux density is high. That is, a stronger magnetic field strength is obtained between the gaps.
上述のように本発明によれば、1ループあたり2ギャップの磁気経路を2つ設けた構成としたことで、従来の馬蹄形タイプに比べ電極径方向の磁界分布が改善される。また、四重極タイプと比べても電極径方向の磁界分布が改善されるとともに、さらにはギャップの磁界強度を高めることが可能となるので、磁束密度分布、磁界強度の改善の両立を図ることができ、ひいては縦磁界電極の遮断性能を向上させることが出来る。 As described above, according to the present invention, the magnetic field distribution in the electrode radial direction is improved as compared with the conventional horseshoe type by providing two magnetic paths with two gaps per loop. Compared to the quadrupole type, the magnetic field distribution in the electrode radial direction is improved, and further, the magnetic field strength of the gap can be increased, so that both the magnetic flux density distribution and the magnetic field strength can be improved. As a result, the interruption performance of the longitudinal magnetic field electrode can be improved.
1A、1B 通電軸
2A、2B 接触子
3A、3B 円弧形磁性体
4A、4B U字形磁性体
Φ5、Φ6 閉じた磁力線(ループ)
g 電極間(ギャップ)
d 接触子の厚さ
1A,
g Between electrodes (gap)
d Contact thickness
Claims (1)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011110163A JP5648577B2 (en) | 2011-05-17 | 2011-05-17 | Vacuum interrupter |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011110163A JP5648577B2 (en) | 2011-05-17 | 2011-05-17 | Vacuum interrupter |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012243444A true JP2012243444A (en) | 2012-12-10 |
| JP5648577B2 JP5648577B2 (en) | 2015-01-07 |
Family
ID=47464971
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011110163A Active JP5648577B2 (en) | 2011-05-17 | 2011-05-17 | Vacuum interrupter |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5648577B2 (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019180030A1 (en) * | 2018-03-21 | 2019-09-26 | Siemens Aktiengesellschaft | Vacuum arc-extinguishing chamber used for contactors and contactor |
| WO2019188699A1 (en) * | 2018-03-29 | 2019-10-03 | 三菱電機株式会社 | Vacuum valve |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5486782A (en) * | 1977-12-05 | 1979-07-10 | Hazemeijer Bv | Vacuum switch |
| JPS60258816A (en) * | 1984-03-19 | 1985-12-20 | ホレツク システメン アンド コンポーネンテン ベーヴエー | Vacuum switch with horseshoe iron magnet element for formingaxial magnetic field |
| JPH09320413A (en) * | 1996-06-04 | 1997-12-12 | Toshiba Corp | Vacuum bulb |
| JPH11260207A (en) * | 1998-03-12 | 1999-09-24 | Toshiba Corp | Vacuum valve |
| JPH11260208A (en) * | 1998-03-13 | 1999-09-24 | Toshiba Corp | Vacuum valve |
-
2011
- 2011-05-17 JP JP2011110163A patent/JP5648577B2/en active Active
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5486782A (en) * | 1977-12-05 | 1979-07-10 | Hazemeijer Bv | Vacuum switch |
| US4271340A (en) * | 1977-12-05 | 1981-06-02 | Hazemeijer B.V. | Electrical vacuum switch having means for generating an axial magnetic field between the contact faces |
| JPS60258816A (en) * | 1984-03-19 | 1985-12-20 | ホレツク システメン アンド コンポーネンテン ベーヴエー | Vacuum switch with horseshoe iron magnet element for formingaxial magnetic field |
| JPH09320413A (en) * | 1996-06-04 | 1997-12-12 | Toshiba Corp | Vacuum bulb |
| JPH11260207A (en) * | 1998-03-12 | 1999-09-24 | Toshiba Corp | Vacuum valve |
| JPH11260208A (en) * | 1998-03-13 | 1999-09-24 | Toshiba Corp | Vacuum valve |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2019180030A1 (en) * | 2018-03-21 | 2019-09-26 | Siemens Aktiengesellschaft | Vacuum arc-extinguishing chamber used for contactors and contactor |
| WO2019188699A1 (en) * | 2018-03-29 | 2019-10-03 | 三菱電機株式会社 | Vacuum valve |
| US11282661B2 (en) | 2018-03-29 | 2022-03-22 | Mitsubishi Electric Corporation | Vacuum interrupter |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5648577B2 (en) | 2015-01-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| KR102652524B1 (en) | Direct-current relay resistant to short-circuit current | |
| KR20120079154A (en) | Vacuum bulb | |
| JP2020537141A (en) | Current sensor assembly | |
| TW201214499A (en) | Multi-axis lens, beam system making use of the compound lens, and method of manufacturing the compound lens | |
| JP2015137892A (en) | Current detection structure | |
| JP2016018882A (en) | Magnetic circuit component | |
| JP5648577B2 (en) | Vacuum interrupter | |
| KR101309458B1 (en) | Vacuum valve | |
| KR100252839B1 (en) | Vacuum valve | |
| JP2010027946A (en) | Magnetic core | |
| JP6651878B2 (en) | Vacuum valve | |
| KR101480845B1 (en) | Vacuum interrupter | |
| JP5210789B2 (en) | Vacuum valve | |
| JP2009289660A (en) | Vacuum valve | |
| JP2001006501A (en) | Vacuum valve | |
| JP6160071B2 (en) | Inductor | |
| JP5664333B2 (en) | Circuit breaker | |
| JP2010225901A (en) | Reactor | |
| JP7413299B2 (en) | Stationary induction appliance and method for manufacturing stationary induction appliance | |
| JP2015001999A (en) | Electrode for vacuum circuit breaker and vacuum valve using the same | |
| JP2013035049A (en) | Apparatus and method for arc welding | |
| JP4935716B2 (en) | Trance | |
| JP2013012299A (en) | Vacuum valve | |
| JP2008135338A (en) | Vacuum valve | |
| JP2009088084A (en) | Stationary induction apparatus |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20121101 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20130513 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20131226 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20140626 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20140626 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140724 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140729 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140925 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20141014 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20141027 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5648577 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |