JP2012198700A - Light detection device and paper sheet processor including light detection device - Google Patents
Light detection device and paper sheet processor including light detection device Download PDFInfo
- Publication number
- JP2012198700A JP2012198700A JP2011061696A JP2011061696A JP2012198700A JP 2012198700 A JP2012198700 A JP 2012198700A JP 2011061696 A JP2011061696 A JP 2011061696A JP 2011061696 A JP2011061696 A JP 2011061696A JP 2012198700 A JP2012198700 A JP 2012198700A
- Authority
- JP
- Japan
- Prior art keywords
- unit
- light
- image
- paper sheet
- light source
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images







Landscapes
- Sorting Of Articles (AREA)
- Character Input (AREA)
- Image Input (AREA)
- Character Discrimination (AREA)
- Facsimile Scanning Arrangements (AREA)
Abstract
Description
本発明の実施形態は、光検出装置、及び光検出装置を備える紙葉類処理装置に関する。 Embodiments described herein relate generally to a light detection device and a paper sheet processing apparatus including the light detection device.
従来、例えば郵便物などの紙葉類を処理する郵便区分機などの紙葉類処理装置が実用化されている。このような紙葉類処理装置は、投入部に投入された紙葉類を1枚ずつ取り込み、紙葉類の認識装置に搬送する。認識装置は、紙葉類から画像を取得し、取得した画像に基づいて、例えば宛先情報、及び切手の位置などを認識する。紙葉類処理装置は、認識結果に基づいて、切手に押印し、紙葉類を所定の区分ポケットに区分する。 2. Description of the Related Art Conventionally, a paper sheet processing apparatus such as a mail sorting machine that processes paper sheets such as mail has been put into practical use. Such a paper sheet processing apparatus takes in the paper sheets input into the input unit one by one and conveys them to the paper sheet recognition apparatus. The recognition device acquires an image from a paper sheet, and recognizes, for example, destination information and a stamp position based on the acquired image. Based on the recognition result, the paper sheet processing apparatus stamps the stamp and sorts the paper sheet into predetermined sorting pockets.
紙葉類処理装置で処理する紙葉類には、窓枠が存在するものがある。このような紙葉類では、窓枠の内部に宛先情報が記載されている場合が多い。切手及び窓枠の内部は、紙葉類の表面とは高さが異なる場合が多い。そこで、認識装置は、紙葉類に対して斜めから光を照射する。これにより、紙葉類の凹凸箇所に陰影ができる。認識装置は、この反射光に基づいて画像を取得し、取得した画像に基づいて、切手及び窓枠の位置を認識する。認識装置は、窓枠の中の画像に基づいて文字認識処理を行い、宛先情報を認識する。さらに、紙葉類処理装置は、切手が貼付されている位置に押印する。 Some paper sheets processed by the paper sheet processing apparatus include a window frame. In such paper sheets, destination information is often described inside the window frame. The insides of stamps and window frames are often different in height from the surface of paper sheets. Therefore, the recognition device irradiates light on the paper sheet obliquely. Thereby, a shadow is made on the uneven portion of the paper sheet. The recognition device acquires an image based on the reflected light, and recognizes the positions of the stamp and the window frame based on the acquired image. The recognition device recognizes destination information by performing character recognition processing based on the image in the window frame. Further, the paper sheet handling apparatus stamps the position where the stamp is pasted.
しかし、紙葉類に対して斜めから照射された光の反射光から画像を取得した場合、紙葉類の折れ目などの凹凸により陰影ができる可能性がある。この為、文字認識処理が正確に行われない場合がある。そこで、斜めから照射された光から位置検出用画像を取得するセンサと、影が出来ないように照射された光から文字認識用画像を取得するセンサとの二つのセンサを備える認識装置がある。 However, when an image is acquired from reflected light of light irradiated obliquely onto a paper sheet, there is a possibility that a shadow may be formed due to unevenness such as a fold of the paper sheet. For this reason, the character recognition process may not be performed accurately. Therefore, there is a recognition device that includes two sensors, a sensor that acquires a position detection image from light irradiated obliquely and a sensor that acquires a character recognition image from light irradiated so as not to make a shadow.
しかし、このような認識装置は、位置検出用画像から切手及び窓枠の位置を検出し、検出された位置と、文字認識用画像とに基づいて文字認識を行う。この為、二つのセンサにより取得された画像中における切手及び窓枠の位置がずれている場合、正確に文字認識処理を行う事ができないという課題がある。また、受光系を二つ備える為、コストが高い、装置が大きくなるなどの課題がある。 However, such a recognition device detects the positions of the stamp and the window frame from the position detection image, and performs character recognition based on the detected position and the character recognition image. For this reason, when the positions of the stamp and the window frame in the images acquired by the two sensors are displaced, there is a problem that the character recognition process cannot be performed accurately. In addition, since two light receiving systems are provided, there are problems such as high cost and large apparatus.
そこで、簡易な構成でより正確に位置検出を行うことができる光検出装置、及び光検出装置を備える紙葉類処理装置を提供することを目的とする。 Accordingly, it is an object of the present invention to provide a light detection device capable of performing position detection more accurately with a simple configuration, and a paper sheet processing device including the light detection device.
一実施形態に係る光検出装置は、搬送される紙葉類に対して光を照射する第1の照明部と、第2の照明部と、を有する照明部と、前記紙葉類が搬送される搬送面上の走査範囲から光を受光する受光部と、前記受光部により受光された光に基づいて画像を取得する画像取得部と、前記照明部の前記第1の照明部が点灯している場合に前記画像取得部により第1の画像を取得し、前記照明部の前記第2の照明部が点灯している場合に前記画像取得部により第2の画像を取得するように前記画像取得部を制御する制御部と、を具備し、前記第1の照明部は、光軸が前記紙葉類に対して所定の角度を成すように設けられた第1の光源と、前記受光部の光軸に対して前記第1の光源と対向する位置に設けられた第2の光源とを有し、前記第2の照明部は、前記第1の光源と前記第2の光源とのうちのいずれか1つを有する。 An optical detection device according to an embodiment includes an illumination unit including a first illumination unit that irradiates light to a conveyed paper sheet and a second illumination unit, and the paper sheet is conveyed. A light receiving unit that receives light from a scanning range on the conveyance surface, an image acquisition unit that acquires an image based on the light received by the light receiving unit, and the first illumination unit of the illumination unit The image acquisition unit acquires the first image when the image acquisition unit is on, and the image acquisition unit acquires the second image by the image acquisition unit when the second illumination unit of the illumination unit is turned on. A control unit that controls the first illumination unit, wherein the first illumination unit includes a first light source provided so that an optical axis forms a predetermined angle with respect to the paper sheet, and the light receiving unit. A second light source provided at a position facing the first light source with respect to the optical axis, and the second illumination unit includes: Having any one of the first light source and the second light source.
(第1の実施形態)
以下、図面を参照しながら、一実施形態に係る紙葉類処理装置、及び光検出装置について詳細に説明する。
(First embodiment)
Hereinafter, a paper sheet processing apparatus and a light detection apparatus according to an embodiment will be described in detail with reference to the drawings.
図1は、一実施形態に係る紙葉類処理装置100の構成例を示す。
紙葉類処理装置100は、紙葉類から画像を読み取って、読み取った画像から宛先情報及び切手の貼付位置などを認識し、紙葉類に押印し、紙葉類を区分する。紙葉類処理装置100は、供給部20、分離ローラ25、搬送路30、光検出装置40、押印部46、印刷部47、主制御部50、区分処理部60、操作部70、表示部80、及び入出力部90を備える。
FIG. 1 shows a configuration example of a paper
The paper
主制御部50は、紙葉類処理装置100の各部の動作を統合的に制御する。主制御部50は、CPU、バッファメモリ、プログラムメモリ、及び不揮発性メモリなどを備える。CPUは、種々の演算処理を行う。バッファメモリは、CPUにより行われる演算の結果を一時的に記憶する。プログラムメモリ及び不揮発性メモリは、CPUが実行する種々のプログラム及び制御データなどを記憶する。主制御部50は、CPUによりプログラムメモリに記憶されているプログラムを実行することにより、種々の処理を行うことができる。
The main control unit 50 controls the operation of each unit of the paper
供給部20は、紙葉類処理装置100に取り込む紙葉類1をストックする。供給部20は、重ねられた状態の紙葉類1をまとめて受け入れる。
The
分離ローラ25は、例えば供給部20の下端に設置される。分離ローラ25は、供給部20に紙葉類1が投入された場合、投入された紙葉類1の集積方向の下端に接する。分離ローラ25は、回転することにより、供給部20にセットされた紙葉類1を集積方向の下端から1枚ずつ紙葉類処理装置100の内部に取り込む。
The
分離ローラ25は、たとえば、1回転するごとに1枚の紙葉類1を取り込む。これにより、分離ローラ25は、紙葉類1を一定のピッチで取り込むことができる。分離ローラ25により取り込まれた紙葉類1は、搬送路30に導入される。
For example, the
搬送路30は、紙葉類1を紙葉類処理装置100内の各部に搬送する搬送部である。搬送路30は、図示しない搬送ベルト及び図示しない駆動プーリなどを備える。搬送路30は、図示しない駆動モータにより駆動プーリを駆動する。搬送ベルトは、駆動プーリにより動作する。
The
搬送路30は、分離ローラ25により取り込む紙葉類1を搬送ベルトにより一定速度で矢印a(搬送方向a)の方向に搬送する。なお、搬送路30において分離ローラ25に近い側を上流側、逆側を下流側として説明する。
The
光検出装置40は、搬送路30により搬送される紙葉類1から画像を取得する。光検出装置40は、例えば、照明と光学センサとを備える。照明は、搬送路30により搬送される紙葉類1に対して光を照射する。光学センサは、紙葉類1で反射する反射光に基づいて画像を取得する。さらに、光検出装置40は、取得した画像に基づいて、切手の貼付位置(切手位置情報)、及び宛先情報を取得し、主制御部50に伝送する。なお、光検出装置40については後述する。
The
主制御部50は、光検出装置40から伝送された宛先情報に基づいて、紙葉類1の搬送先を判定する。さらに、主制御部50は、宛先情報に基づいて2次元コード、またはバーコードなどのイメージを生成し、生成したイメージを印刷部47に供給する。またさらに、主制御部50は、光検出装置40から伝送された切手の貼付位置(切手位置情報)に基づいて、押印部46の動作を制御する。
The main control unit 50 determines the transport destination of the
押印部46は、主制御部50の制御に基づいて、例えば日付印などのスタンプを紙葉類1に押印する。即ち、押印部46は、切手位置情報に基づいて、紙葉類1上の光検出装置40により検出された切手の貼付位置と重なる位置にスタンプを押印する。例えば、押印部46は、割り印となるようにスタンプを押印する。
The stamping
印刷部47は、主制御部50の制御に基づいて、例えば二次元コードまたはバーコードなどのイメージを印刷する。即ち、印刷部47は、主制御部50から供給される二次元コードまたはバーコードなどのイメージを印刷する。例えば、印刷部47は、紫外線が照射された場合に励起光を発する蛍光体などを含むインクにより上記のイメージを印刷する。
The
区分処理部60は、主制御部50の制御に基づいて、紙葉類1を区分けして集積する。区分処理部60は、例えば、第1のゲート61、第1のスタッカ62、第2のゲート63、及び第2のスタッカ64などの複数のゲート及びスタッカを備える。
The sorting
第1のゲート61及び第2のゲート63は、搬送路30の光検出装置40、押印部46、及び印刷部47より下流に設けられる。第1のゲート61及び第2のゲート63は、それぞれ主制御部50の制御に基づいて動作する。主制御部50は、上記した処理により認識された宛先情報に応じて、第1のゲート61及び第2のゲート63を制御する。
The
第1のゲート61は、紙葉類1の搬送先を第1のスタッカ62と第2のゲート63とで切り替える。また、第2のゲート63は、紙葉類1の搬送先を第2のスタッカ64と他のスタッカとで切り替える。
The
また、主制御部50は、光検出装置40により宛先情報が認識されなかった紙葉類1から取得した画像を保持するメモリを備える。また、区分処理部60は、光検出装置40により宛先情報が認識されなかった紙葉類1を集積するスタッカを備える
操作部70は、オペレータによる各種操作入力を操作部により受け付ける。操作部70は、オペレータにより入力される操作に基づいて操作信号を生成し、生成した操作信号を主制御部50に伝送する。
The main control unit 50 also includes a memory that holds an image acquired from the
例えば、紙葉類処理装置100は、請求書に代表される同一フォーマットの書状において光検出装置40により宛先領域が検出できず、宛先情報が認識されなかった紙葉類1の画像を表示部80に表示し、オペレータに宛先領域を読み取らせて宛先領域を操作部70により入力させることにより、それ以降に供給される同一フォーマットの書状に対し正しい宛先領域を検出させ、宛先情報を取得させるようにすることができる。
For example, the paper
表示部80は、主制御部50の制御に基づいて種々の画面を表示する。例えば、表示部80は、オペレータに対して各種の操作案内、及び処理結果などを表示する。また、上記したように、表示部80は、光検出装置40により宛先情報が認識されなかった紙葉類1の画像を表示する構成であってもよい。なお、操作部70と表示部80とは、タッチパネルとして一体に形成されていてもよい。
The
入出力部90は、紙葉類処理装置100に接続される外部機器、または記憶媒体とデータの送受信を行う。例えば、入出力部90は、ディスクドライブ、USBコネクタ、LANコネクタ、またはデータの送受信が可能な他のインターフェースなどを備える。紙葉類処理装置100は、入出力部90に接続される外部機器、または記憶媒体からデータを取得することができる。また、紙葉類処理装置100は、入出力部90に接続される外部機器、または記憶媒体に処理結果を伝送することもできる。
The input / output unit 90 transmits / receives data to / from an external device connected to the paper
図2は、紙葉類処理装置100により処理される紙葉類1の例を示す。
図2により示されるように、紙葉類1の表面には、切手11、窓枠12、赤枠13、及び線分14などの要素が存在する。
FIG. 2 shows an example of the
As shown in FIG. 2, elements such as a
切手11は、一般的な切手であり、通常、紙葉類1に糊付けされた状態で搬送される。窓枠12は、例えば、透過性を有するセロハンなどが貼付された領域である。例えば、紙葉類1が封書などである場合、宛先を示す文字列が窓枠12を通して視認可能な状態であることが多い。即ち、光検出装置40は、窓枠12内の画像を認識することにより、宛先情報を取得することができる。
The
赤枠13は、例えば郵便番号などの情報が記載される枠である。即ち、光検出装置40は、赤枠13内の画像を認識することにより、宛先の郵便番号を取得することができる。線分14は、例えば、紙葉類1の表面に印刷された模様などである。
The
なお、切手11は、紙葉類1の搬送方向aに対して垂直な方向に所定の厚さを有する。また、窓枠12と、上記の宛先を示す文字列が印刷されたシートとの間には、紙葉類1の搬送方向aに対して垂直な方向に高さの差が存在する。よって、光検出装置40は、紙葉類1に対して、斜めから光を照射することにより、切手11及び窓枠12に陰影をつけることができる。
The
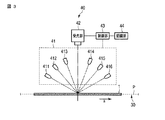
図3は、第1の実施形態に係る光検出装置40の例を示す。
光検出装置40は、紙葉類1の券面を撮像する。光検出装置40の光学センサは、例えば、Charge Coupled Device(CCD)などの受光素子と、光学系と、光源とを備える。光学センサは、搬送される紙葉類1に対して光源により光を投光し、反射光または透過光を光学系により受光する。光学センサは、光学系により受光した光をCCDに結像させ、電気信号(画像)を取得する。光検出装置40は、搬送路30により搬送される紙葉類1から連続して画像を取得することにより、紙葉類1の全体の画像を取得する。
FIG. 3 shows an example of the
The
光検出装置40は、例えば紙葉類処理装置100の搬送路30の近傍に設置される。図3に示すように、光検出装置40は、照明部41、受光部42、制御部43、及び認識部44を備える。図3において認識装置は光検出装置と同じ場所に記載されているが、切り離されて設置される場合もある。搬送路30は、紙葉類1を矢印aの方向に所定の速度で搬送する。なお、紙葉類1が搬送される搬送路上の面を搬送面Pとする。
The
制御部43は、光検出装置40の各部の動作を統合的に制御する。制御部43は、CPU、バッファメモリ、プログラムメモリ、及び不揮発性メモリなどを備える。CPUは、種々の演算処理を行う。バッファメモリは、CPUにより行われる演算の結果を一時的に記憶する。プログラムメモリ及び不揮発性メモリは、CPUが実行する種々のプログラム及び制御データなどを記憶する。制御部43は、CPUによりプログラムメモリに記憶されているプログラムを実行することにより、種々の処理を行うことができる。例えば、制御部43は、照明部41及び受光部42の動作のタイミングを制御する。
The
なお、制御部43は、図1に示す主制御部50と通信を行うことができる。制御部43は、主制御部50から入力された制御信号に基づいて、照明部41及び受光部42を動作させる信号を生成する。
The
照明部41は、搬送される紙葉類1に対して光を照射する。照明部41は、紙葉類1が搬送される搬送面Pに対してそれぞれ異なる角度で光を照射するように設置された複数の光源411乃至416を備える。
The
各光源411乃至416は、例えば、それぞれ、可視光を射出するLED、蛍光灯、または他の光源などを備える。各光源411乃至416は、それぞれ、受光部42の走査範囲に対して異なる角度で光を照射するように設置される。なお、光源411乃至416は、全ての光源411乃至416が点灯された場合、紙葉類1の表面の凹凸により陰影ができないように設置される。
Each of the
受光部42は、所定の走査範囲(撮像範囲)を走査し、画像または光強度に応じた電気信号を取得する。すなわち、受光部42は、入射する光の光強度を検出値として検出する。受光部42は、例えば、CMOS、フォトダイオード、またはCCDなどの受光素子が線状に配列されたラインイメージセンサと、光を受光するレンズとを備える。また、受光部42は、例えば、照明部41から射出される光の波長に応じた特性を有するフィルタ(波長制限媒体)をさらに備えていてもよい。また、受光部42のラインイメージセンサは、所定の帯域の波長を感度領域とするセンサにより構成されていてもよい。
The
レンズは、上記の走査範囲から光を受光する。さらに、レンズは、走査範囲から受光した光をラインイメージセンサに結像させる。ラインイメージセンサは、受光した光を電気信号(画像)に変換する。 The lens receives light from the scanning range. Further, the lens causes the light received from the scanning range to form an image on the line image sensor. The line image sensor converts received light into an electrical signal (image).
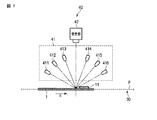
図4は、照明部41の照明範囲、及び受光部42の走査範囲について示す。
紙葉類1は、図2に示したように、例えば矩形状の本体を有する。即ち、紙葉類1は、図4に示すように長手方向と短手方向(幅方向)とを有する。本実施形態では、紙葉類1は、長手方向に搬送される。
FIG. 4 shows the illumination range of the
As shown in FIG. 2, the
図4に示されるように、受光部42の走査範囲は、紙葉類1の搬送方向と搬送面P上において直交する方向に延びるように形成される。なお、受光部42の走査範囲は、少なくとも紙葉類1の幅方向の長さより長く形成される。これにより、受光部42は、紙葉類1の全体から画像を取得することが出来る。
As shown in FIG. 4, the scanning range of the
また、照明部41の照明範囲は、少なくとも受光部42の走査範囲を覆うように形成される。これにより、照明部41は、受光部42の走査範囲の全体に対して光を照射することができる。
The illumination range of the
図3に示される制御部43は、受光部42により取得された紙葉類1の画像に対して信号処理を施し、宛先情報を認識する為の画像(宛先認識用画像)と、切手11及び窓枠12の位置を認識する為の画像(位置認識用画像)とを生成する。制御部43は、生成した宛先認識用画像と、位置認識用画像とを認識部44に出力する。
The
認識部44は、種々の認識処理を行う。認識部44は、制御部43から供給された位置認識用画像に基づいて、切手11の位置及び窓枠12の位置を認識する。これにより、認識部44は、切手位置情報と、窓枠位置情報とを取得する。
The
さらに、認識部44は、窓枠位置情報に基づいて、宛先認識用画像上に宛先情報を示す文字列が写り込んでいる範囲を特定する。認識部44は、特定した範囲の画像から文字を認識することにより、宛先情報を取得する。即ち、認識部44は、窓枠位置情報に基づいて、宛先認識用画像を切り出し、切り出した画像に対して文字認識処理を行うことにより、宛先情報を取得する。認識部44は、取得した切手位置情報及び宛先情報を主制御部50に供給する。
Further, the recognizing
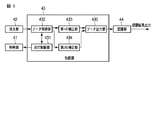
図5は、制御部43が有する機能について示す。
制御部43は、点灯制御部431、データ取得部432、第1の補正部433、第2の補正部434、及びデータ出力部435を備える。
FIG. 5 shows the functions of the
The
点灯制御部431は、照明部41の各光源411乃至416の点灯のタイミングを制御する。データ取得部432は、受光部42のラインイメージセンサにより画像を取得するタイミングを制御する。
The
例えば、点灯制御部431及びデータ取得部432は、図6に示されるタイミングチャートに基づいて、各光源411乃至416の点灯のタイミングと、受光部42のラインイメージセンサにより画像を取得するタイミングとを制御する。
For example, the
図6に示されるタイミングチャートに基づいて動作した場合、第1の光源411は、時間t1において点灯を開始し、時間t3において点灯を終了する。さらに、第1の光源411は、時間t9において点灯を開始し、時間t11において点灯を終了する。
When operating based on the timing chart shown in FIG. 6, the first
また、第2の光源412、第3の光源413、第4の光源414、及び第5の光源415は、第1の光源411と同様に、時間t1において点灯を開始し、時間t3において点灯を終了し、時間t9において点灯を開始し、時間t11において点灯を終了する。光源411乃至415は、同様の点灯周期で以降の動作を行う。
Similarly to the first
また、図6に示されるタイミングチャートに基づいて動作した場合、第6の光源416は、時間t1において点灯を開始し、時間t3において点灯を終了する。さらに、第6の光源416は、時間t5において点灯を開始し、時間t7において点灯を終了する。またさらに、第6の光源416は、時間t9において点灯を開始し、時間t11において点灯を終了する。光源416は、同様の点灯周期で以降の動作を行う。
In addition, when operated based on the timing chart shown in FIG. 6, the sixth
また、図6に示されるタイミングチャートに基づいて動作した場合、受光部42は、時間t2において走査を開始し、時間t4において走査を終了する。これにより第1のラインの画像の取得が完了する。なお、時間t1から時間t3の間は、光源411乃至416が点灯している。即ち、受光部42は、光源411乃至416により照明された光の反射光に基づいて第1のラインの画像を取得する。
In addition, when operating based on the timing chart shown in FIG. 6, the
光源411乃至416が点灯する場合、図7により示されるように、紙葉類1の表面の凹凸により陰影が生じない。受光部42は、光源411乃至416が点灯するタイミングで画像を取得することにより、宛先情報の認識に適した画像(宛先認識用画像)を取得することができる。
When the
さらに、受光部42は、時間t6において走査を開始し、時間t8において走査を終了する。これにより第2のラインの画像の取得が完了する。なお、時間t5から時間t7の間は、光源411乃至415が消灯しており、光源416が点灯している。即ち、受光部42は、光源416により照明された光の反射光に基づいて第2のラインの画像を取得する。
Further, the
光源416は、図8により示されるように、光源416から射出される光の光軸が紙葉類1と所定の角度を成すように設けられている。この為、光源416が単体で点灯する場合、図8により示されるように、紙葉類1の表面の凹凸により陰影が生じる。図8の例では、切手11により陰影が生じる例が示されている。受光部42は、光源416が単体で点灯するタイミングで画像を取得することにより、切手11及び窓枠12の位置を認識する為の画像(位置認識用画像)を取得することができる。
As shown in FIG. 8, the
さらに、受光部42は、所定時間毎にスキャンを行うことにより、第3のライン、第4のライン、及び第Nのラインの画像を取得する。これにより、受光部42は、紙葉類1の全体から画像を取得する。
Furthermore, the
図6に示されるタイミングチャートにしたがって動作する場合、受光部42は、奇数ラインの画像として、宛先認識用画像を取得する。また、受光部42は、偶数ラインの画像として、位置認識用画像を取得する。
When operating according to the timing chart shown in FIG. 6, the
データ取得部432は、受光部42のラインイメージセンサにより取得した画像を第1の補正部433と第2の補正部434とに伝送する。例えば、データ取得部432は、宛先認識用画像を第1の補正部433に伝送し、位置認識用画像を第2の補正部434に伝送する。
The
第1の補正部433及び第2の補正部434は、それぞれ、データ取得部432から伝送された画像に対してシェイディング(shading)補正を行う。これにより、第1の補正部433及び第2の補正部434は、データ取得部432から伝送された画像の明るさを補正する。第1の補正部433及び第2の補正部434は、補正を施した画像をデータ出力部435に伝送する。データ出力部435は、第1の補正部433及び第2の補正部434から伝送された画像を認識部44に出力する。
The
なお、第1の補正部433及び第2の補正部434は、それぞれ、異なる補正係数を用いてデータ取得部432から伝送された画像に対して補正を行う。例えば、第1の補正部433は、第1の補正係数を用いて補正を行い、第2の補正部434は、第2の補正係数を用いて補正を行う。
Note that the
第1の補正係数及び第2の補正係数は、第1の補正部433により補正が施された画像と、第2の補正部434により補正が施された画像とで明るさが同程度になる値に設定される。
The first correction coefficient and the second correction coefficient have the same brightness in the image corrected by the
なお、宛先認識用画像と位置認識用画像との明るさの差は、光源411乃至416が点灯した場合の照度と、光源416が単体で点灯した場合の照度と、に関係する。従って、第1の補正係数及び第2の補正係数は、光源411乃至416の照度に基づいて決定されてもよい。
Note that the difference in brightness between the destination recognition image and the position recognition image is related to the illuminance when the
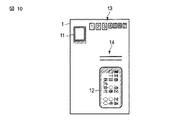
図9及び図10は、本実施形態の光検出装置40により取得された宛先認識用画像及び位置認識用画像の例を示す。図9は、宛先認識用画像の例を示す。図10は、位置認識用画像の例を示す。
9 and 10 show examples of destination recognition images and position recognition images acquired by the
図9に示されるように、宛先認識用画像は、陰影などが写りこまず、且つ、文字認識に適した明るさの画像である。また、図10に示されるように、位置認識用画像は、切手11及び窓枠12の位置の認識に適した画像である。位置認識用画像は、厚みを有する切手11の近傍、及び窓枠12内に生じた陰影を有する。
As shown in FIG. 9, the destination recognition image is an image that does not show shadows or the like and has a brightness suitable for character recognition. Also, as shown in FIG. 10, the position recognition image is an image suitable for recognizing the positions of the
認識部44は、位置認識用画像の陰影に基づいて、切手11及び窓枠12の位置を認識する。即ち、認識部44は、位置認識用画像の陰影に基づいて、切手位置情報及び窓枠位置情報を取得する。
The
さらに、認識部44は、窓枠位置情報に基づいて。宛先認識用画像上に宛先情報を示す文字列が写り込んでいる範囲を特定する。認識部44は、特定した範囲の画像から文字を認識することにより、宛先情報を取得する。
Furthermore, the
例えば、認識部44は、予め設定されたテンプレートと位置認識用画像とでパターンマッチングを行うことにより、切手11及び窓枠12の位置を認識することができる。例えば、認識部44は、L字またはコの字の形状のテンプレートを予め記憶する。これにより、認識部44は、位置認識用画像上のL字またはコの字の形状のオブジェクトを検出することができる。例えば、認識部44は、検出したオブジェクトが矩形状となるように補完を行うことで、切手11及び窓枠12の位置を認識することができる。
For example, the
また、位置認識用画像には、図10により示される赤枠13、または線分14などが写り込む場合がある。赤枠13及び線分14などは、紙葉類1に印刷された模様などの印刷情報である。赤枠13及び線分14と上記のテンプレートの形状とが似ている場合、認識部44は、赤枠13及び線分14と、切手11及び窓枠12とを誤認識する可能性がある。そこで、認識部44は、宛先認識用画像と位置認識用画像との両方を用いて切手11及び窓枠12を認識する構成であってもよい。
Further, the position recognition image may include a
この場合、認識部44は、宛先認識用画像と位置認識用画像との差異を検出し、検出された差異に基づいて切手11及び窓枠12の位置を認識する。この場合、赤枠13及び線分14は、宛先認識用画像と位置認識用画像との両方に写り込んでいる要素であり、差異から除外される。また、位置認識用画像の切手11及び窓枠12の近傍に生じた陰影は、宛先認識用画像には写りこんでいない要素であり、差異として検出される。認識部44は、検出された差異に基づいて切手11及び窓枠12の位置を認識することにより、より高い精度で切手11及び窓枠12の位置を認識することができる。
In this case, the
認識部44は、例えば、宛先認識用画像と位置認識用画像との論理積を算出し、算出した論理積を位置認識用画像から除算(または減算)することにより、宛先認識用画像と位置認識用画像との差異を検出する。
For example, the recognizing
また、認識部44は、宛先認識用画像及び位置認識用画像からそれぞれ線分などの要素を検出し、検出された線分の幅の差に基づいて、宛先認識用画像と位置認識用画像との差異を検出する。
The recognizing
上記したように、本実施形態に係る光検出装置40は、異なる角度で配置された複数の光源411及び416の点灯のタイミングと、受光部42の画像取得のタイミングとを制御する。これにより、光検出装置40は、紙葉類1の表面の凹凸に起因する陰影が写り込まない宛先認識用画像と、紙葉類1の表面の凹凸に起因する陰影が写り込んだ位置認識用画像と、を取得する。光検出装置40は、位置認識用画像に基づいて、切手位置情報と窓枠位置情報を取得する。さらに、光検出装置40は、窓枠位置情報と宛先認識用画像とに基づいて、宛先情報を取得する。
As described above, the
この構成によると、光検出装置40は、1つの受光部42(ラインイメージセンサ)を用いて宛先認識用画像と位置認識用画像とを取得することができる。この場合、宛先認識用画像と位置認識用画像とを1ラインずつ交互に取得している為、宛先認識用画像と位置認識用画像との間に位置のズレなどが生じることを防ぐことが出来る。この為、光検出装置40は、受光部42の設置を容易にすることができる。さらに、光検出装置40は、高い精度で切手位置情報及び宛先情報を取得することができる。
According to this configuration, the
この結果、簡易な構成でより正確に位置検出を行うことができる光検出装置、及び光検出装置を備える紙葉類処理装置を提供することができる。 As a result, it is possible to provide a photodetection device capable of performing position detection more accurately with a simple configuration, and a paper sheet processing apparatus including the photodetection device.
なお、上記した実施形態では、光検出装置40は、宛先認識用画像と、位置認識用画像とを1ラインずつ交互に取得するとして説明したが、この構成に限定されない。光検出装置40は、宛先認識用画像と、位置認識用画像とを複数ラインずつ交互に取得する構成であってもよい。
In the above-described embodiment, the
また、上記した実施形態では、光検出装置40は、奇数ラインで宛先認識用画像を取得し、偶数ラインで位置認識用画像を検出するとして説明したが、逆であってもよい。即ち、光検出装置40は、偶数ラインで宛先認識用画像を取得し、奇数ラインで位置認識用画像を検出する構成であってもよい。
In the above-described embodiment, the
またさらに、上記した実施形態では、光検出装置40は、第1の補正部433及び第2の補正部434により宛先認識用画像と位置認識用画像とが同じ明るさになるように補正すると説明したが、この構成に限定されない。光検出装置40は、点灯制御部431により光源411乃至416の発光強度を制御する構成であってもよい。
Furthermore, in the above-described embodiment, it is described that the
またさらに、上記した実施形態では、照明部41は、6個の光源を備える構成として説明したが、この構成に限定されない。光源の数は、紙葉類1の凹凸に起因する陰影が生じないように照明する事ができる数であれば、如何なる数であってもよい。
Furthermore, in the above-described embodiment, the
この場合、光検出装置40は、図6に示される時間t5からt7の間に、光源416を強い発光強度で発光させることにより、同程度の明るさの宛先認識用画像及び位置認識用画像を取得することが出来る。例えば、光検出装置40は、宛先認識用画像を取得するタイミングと、位置認識用画像を取得するタイミングとで、受光部42の走査範囲における照度が同程度になるように光源411乃至416の発光強度を制御する。
In this case, the
(第2の実施形態)
図11は、第2の実施形態に係る光検出装置40の例を示す。なお、第1の実施形態と同様の構成には同じ参照符号を付し、その詳細な説明を省略する。
光検出装置40は、例えば紙葉類処理装置100の搬送路30の近傍に設置される。図11に示すように、光検出装置40は、照明部45、受光部42、制御部43、及び認識部44を備える。搬送路30は、紙葉類1を矢印aの方向に所定の速度で搬送する。なお、紙葉類1が搬送される搬送路上の面を搬送面Pとする。
(Second Embodiment)
FIG. 11 shows an example of the
The
照明部45は、搬送される紙葉類1に対して光を照射する。照明部45は、紙葉類1が搬送される搬送面Pに対してそれぞれ異なる角度で光を照射するように設置された複数の光源451乃至456を備える。
The
光源451、光源453、及び光源455は、例えば、それぞれ、白色などのブロードな帯域の光を射出するLED、蛍光灯、または他の光源などを備える。光源451、光源453、及び光源455は、それぞれ、受光部42の走査範囲に対して異なる角度で光を照射するように設置される。なお、光源451、光源453、及び光源455は、光源451、光源453、及び光源455が全て点灯された場合、紙葉類1の表面の凹凸により陰影ができないように設置される。
The
光源452、光源454、及び光源456は、例えば、それぞれ、赤色の波長の光を射出するLED、蛍光灯、または他の光源などを備える。光源452、光源454、及び光源456は、それぞれ、受光部42の走査範囲に対して異なる角度で光を照射するように設置される。なお、光源452、光源454、及び光源456は、光源452、光源454、及び光源456が全て点灯された場合、紙葉類1の表面の凹凸により陰影ができないように設置される。
The
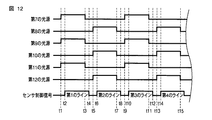
制御部43は、図12に示されるタイミングチャートに基づいて、各光源451乃至456の点灯のタイミングと、受光部42のラインイメージセンサにより画像を取得するタイミングとを制御する。
Based on the timing chart shown in FIG. 12, the
図12に示されるタイミングチャートに基づいて動作した場合、第7の光源451、第9の光源453、及び第11の光源455は、時間t1において点灯を開始し、時間t3において点灯を終了する。さらに、第7の光源451、第9の光源453、及び第11の光源455は、時間t9において点灯を開始し、時間t11において点灯を終了する。第7の光源451、第9の光源453、及び第11の光源455は、同様の点灯周期で以降の動作を行う。
When operating based on the timing chart shown in FIG. 12, the seventh
また、第8の光源452、第10の光源454、及び第12の光源456は、時間t5において点灯を開始し、時間t7において点灯を終了し、時間t13において点灯を開始し、時間t15において点灯を終了する。第8の光源452、第10の光源454、及び第12の光源456は、同様の点灯周期で以降の動作を行う。
In addition, the eighth
第7の光源451、第9の光源453、及び第11の光源455が点灯する場合、紙葉類1の表面の凹凸により陰影が生じない。受光部42は、第7の光源451、第9の光源453、及び第11の光源455が点灯するタイミングで画像を取得することにより、宛先情報の認識に適した画像(宛先認識用画像)を取得することができる。即ち、光検出装置40は、図9に示される画像と同様の画像を取得することが出来る。
When the seventh
また、第8の光源452、第10の光源454、及び第12の光源456が点灯する場合、紙葉類1の表面の凹凸により陰影が生じない。さらに、第8の光源452、第10の光源454、及び第12の光源456は、赤色の波長の光を照射する光源である。この為、受光部42は、第8の光源452、第10の光源454、及び第12の光源456が点灯するタイミングで画像を取得することにより、紙葉類1上の赤色で印刷された模様(赤色要素)が除去された画像(赤色除去画像)を取得することができる。
Further, when the eighth
さらに、受光部42は、所定時間毎にスキャンを行うことにより、第3のライン、第4のライン、及び第Nのラインの画像を取得する。これにより、受光部42は、紙葉類1の全体から画像を取得する。
Furthermore, the
図12に示されるタイミングチャートにしたがって動作する場合、受光部42は、奇数ラインの画像として、宛先認識用画像を取得する。また、受光部42は、偶数ラインの画像として、赤色除去画像を取得する。
When operating according to the timing chart shown in FIG. 12, the
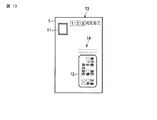
図13は、本実施形態の光検出装置40により取得された赤色除去画像の例を示す。
図13に示されるように、赤色除去画像は、紙葉類1上において赤色で印刷された模様が写りこまない。この為、例えば、赤枠13内に郵便番号などが記載されている場合、認識部44は、赤色除去画像に基づいて文字認識を行うことにより、容易に郵便番号を取得することができる。また、例えば、線分14が赤色で紙葉類1に印刷されている場合、光検出装置40は、図13に示されるように線分14が除去された画像を取得することができる。
FIG. 13 shows an example of a red-removed image acquired by the
As shown in FIG. 13, in the red-removed image, a pattern printed in red on the
上記したように、本実施形態に係る光検出装置40は、白色などのブロードな帯域の光と、赤色光とを交互のタイミングで紙葉類1に照射する。光検出装置40は、各タイミングで画像を取得することにより、宛先認識用画像と赤色除去画像とを取得することができる。これにより、光検出装置40は、赤枠13内に記載されている郵便番号などを容易に認識することができる。
As described above, the
なお、上気した実施形態では、光検出装置40は、白色などのブロードな帯域の光と、赤色光とを交互のタイミングで紙葉類1に照射し、宛先認識用画像と赤色除去画像とを取得すると説明したが、この構成に限定されない。さらに第1の実施例の構成を組み合わせても良い。
In the above-described embodiment, the
即ち、光検出装置40は、白色などのブロードな帯域の光を照射するタイミングと、赤色光を照射するタイミングと、陰影ができるように光を照射するタイミングとを制御する。さらに、光検出装置40は、各タイミングにおいて画像を取得する。これにより、光検出装置40は、紙葉類1の表面の凹凸に起因する陰影が写り込まない宛先認識用画像と、紙葉類1の表面の凹凸に起因する陰影が写り込んだ位置認識用画像と、赤色要素が除去された赤色除去画像とを取得することができる。
That is, the
これにより、光検出装置40は、位置認識用画像に基づいて、切手位置情報と窓枠位置情報を取得することができる。さらに、光検出装置40は、窓枠位置情報と宛先認識用画像とに基づいて、宛先情報を取得する。またさらに、光検出装置40は、赤色除去画像に基づいて、郵便番号などを容易に取得することができる。この結果、簡易な構成でより正確に位置検出を行うことができる光検出装置、及び光検出装置を備える紙葉類処理装置を提供することができる。
Thereby, the
なお、上述の各実施の形態で説明した機能は、ハードウエアを用いて構成するに留まらず、ソフトウエアを用いて各機能を記載したプログラムをコンピュータに読み込ませて実現することもできる。また、各機能は、適宜ソフトウエア、ハードウエアのいずれかを選択して構成するものであっても良い。 It should be noted that the functions described in the above embodiments are not limited to being configured using hardware, but can be realized by causing a computer to read a program describing each function using software. Each function may be configured by appropriately selecting either software or hardware.
なお、本発明は上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合せにより種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。更に、異なる実施形態に亘る構成要素を適宜組み合せてもよい。 Note that the present invention is not limited to the above-described embodiment as it is, and can be embodied by modifying the constituent elements without departing from the scope of the invention in the implementation stage. Further, various inventions can be formed by appropriately combining a plurality of constituent elements disclosed in the embodiment. For example, some components may be deleted from all the components shown in the embodiment. Furthermore, you may combine suitably the component covering different embodiment.
1…紙葉類、11…切手、12…窓枠、13…赤枠、14…線分、20…供給部、25…分離ローラ、30…搬送路、40…光検出装置、41…照明部、42…受光部、43…制御部、44…認識部、45…照明部、46…押印部、47…印刷部、50…主制御部、60…区分処理部、70…操作部、80…表示部、90…入出力部、100…紙葉類処理装置、411乃至416…光源、431…点灯制御部、432…データ取得部、433…第1の補正部、434…第2の補正部、435…データ出力部、451乃至456…光源。
DESCRIPTION OF
Claims (10)
前記紙葉類が搬送される搬送面上の走査範囲から光を受光する受光部と、
前記受光部により受光された光に基づいて画像を取得する画像取得部と、
前記照明部の前記第1の照明部が点灯している場合に前記画像取得部により第1の画像を取得し、前記照明部の前記第2の照明部が点灯している場合に前記画像取得部により第2の画像を取得するように前記画像取得部を制御する制御部と、
を具備し、
前記第1の照明部は、光軸が前記紙葉類に対して所定の角度を成すように設けられた第1の光源と、前記受光部の光軸に対して前記第1の光源と対向する位置に設けられた第2の光源とを有し、
前記第2の照明部は、前記第1の光源と前記第2の光源とのうちのいずれか1つを有する、
光検出装置。 An illumination unit having a first illumination unit that irradiates light to the conveyed paper sheet, and a second illumination unit;
A light receiving unit that receives light from a scanning range on a conveyance surface on which the paper sheet is conveyed;
An image acquisition unit for acquiring an image based on the light received by the light receiving unit;
The first image is acquired by the image acquisition unit when the first illumination unit of the illumination unit is turned on, and the image acquisition is performed when the second illumination unit of the illumination unit is turned on. A control unit that controls the image acquisition unit to acquire a second image by the unit;
Comprising
The first illumination unit is opposed to the first light source provided such that an optical axis forms a predetermined angle with respect to the paper sheet, and the first light source opposed to the optical axis of the light receiving unit. A second light source provided at a position to
The second illuminating unit includes any one of the first light source and the second light source.
Photodetector.
前記第1の画像に対して第1の補正係数を用いて補正を行う第1の補正部と、
前記第2の画像に対して第2の補正係数を用いて補正を行う第2の補正部と、
を具備する、請求項3に記載の光検出装置。 The controller is
A first correction unit that performs correction on the first image using a first correction coefficient;
A second correction unit that corrects the second image using a second correction coefficient;
The photodetection device according to claim 3, comprising:
前記照明部は、搬送される紙葉類に対して赤色の波長の光を照射する第3の照明部を具備し、
前記制御部は、前記第3の照明部が点灯している場合に前記画像取得部により第3の画像を取得し、
前記認識部は、前記第3の画像に基づいて郵便番号を認識する、
請求項3に記載の光検出装置。 Further comprising a recognition unit for recognizing a zip code based on the image acquired by the image acquisition unit;
The illuminating unit includes a third illuminating unit that irradiates the transported paper sheet with light having a red wavelength,
The control unit acquires a third image by the image acquisition unit when the third illumination unit is lit,
The recognizing unit recognizes a zip code based on the third image;
The photodetection device according to claim 3.
前記搬送部により搬送される前記紙葉類に対して光を照射する第1の照明部と、第2の照明部と、を有する照明部と、
前記紙葉類が搬送される搬送面上の走査範囲から光を受光する受光部と、
前記受光部により受光された光に基づいて画像を取得する画像取得部と、
前記照明部の前記第1の照明部が点灯している場合に前記画像取得部により第1の画像を取得し、前記照明部の前記第2の照明部が点灯している場合に前記画像取得部により第2の画像を取得するように前記画像取得部を制御する制御部と、
前記第2の画像に基づいて、窓枠の位置を認識し、認識された前記窓枠の位置と、前記第1の画像とに基づいて、前記紙葉類の宛先情報を認識する認識部と、
前記認識部により認識された前記宛先情報に基づいて、前記紙葉類を区分する区分処理部と、
を具備し、
前記第1の照明部は、光軸が前記紙葉類に対して所定の角度を成すように設けられた第1の光源と、前記受光部の光軸に対して前記第1の光源と対向する位置に設けられた第2の光源とを有し、
前記第2の照明部は、前記第1の光源と前記第2の光源とのうちのいずれか1つを有する、
紙葉類処理装置。 A transport unit for transporting paper sheets;
An illumination unit having a first illumination unit that irradiates light to the paper sheet conveyed by the conveyance unit; and a second illumination unit;
A light receiving unit that receives light from a scanning range on a conveyance surface on which the paper sheet is conveyed;
An image acquisition unit for acquiring an image based on the light received by the light receiving unit;
The first image is acquired by the image acquisition unit when the first illumination unit of the illumination unit is turned on, and the image acquisition is performed when the second illumination unit of the illumination unit is turned on. A control unit that controls the image acquisition unit to acquire a second image by the unit;
A recognition unit that recognizes a position of a window frame based on the second image, and recognizes destination information of the paper sheet based on the recognized position of the window frame and the first image; ,
A sorting processing unit for sorting the paper sheets based on the destination information recognized by the recognition unit;
Comprising
The first illumination unit is opposed to the first light source provided such that an optical axis forms a predetermined angle with respect to the paper sheet, and the first light source opposed to the optical axis of the light receiving unit. A second light source provided at a position to
The second illuminating unit includes any one of the first light source and the second light source.
Paper sheet processing equipment.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011061696A JP2012198700A (en) | 2011-03-18 | 2011-03-18 | Light detection device and paper sheet processor including light detection device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011061696A JP2012198700A (en) | 2011-03-18 | 2011-03-18 | Light detection device and paper sheet processor including light detection device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012198700A true JP2012198700A (en) | 2012-10-18 |
Family
ID=47180863
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011061696A Pending JP2012198700A (en) | 2011-03-18 | 2011-03-18 | Light detection device and paper sheet processor including light detection device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012198700A (en) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016021145A1 (en) * | 2014-08-04 | 2016-02-11 | パナソニックIpマネジメント株式会社 | Electronic locker |
| JP2016112040A (en) * | 2014-12-11 | 2016-06-23 | 富士通株式会社 | Bed area extraction method, bed area extraction device and bed area extraction program |
| JP2016177754A (en) * | 2015-03-23 | 2016-10-06 | 日本電気株式会社 | Character extraction device, character extraction method, and character extraction program |
| CN106855948A (en) * | 2016-12-13 | 2017-06-16 | 深圳市海云天科技股份有限公司 | It is a kind of to detect that answering card scanning produces the method and device of secondary pollution |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6241118A (en) * | 1985-08-16 | 1987-02-23 | Toshiba Corp | Cargo sorting device |
| JPH11179288A (en) * | 1997-09-16 | 1999-07-06 | Toshiba Corp | Level detector and treating device using the same |
| JP2010277252A (en) * | 2009-05-27 | 2010-12-09 | Toshiba Corp | Paper sheet handling apparatus |
-
2011
- 2011-03-18 JP JP2011061696A patent/JP2012198700A/en active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6241118A (en) * | 1985-08-16 | 1987-02-23 | Toshiba Corp | Cargo sorting device |
| JPH11179288A (en) * | 1997-09-16 | 1999-07-06 | Toshiba Corp | Level detector and treating device using the same |
| JP2010277252A (en) * | 2009-05-27 | 2010-12-09 | Toshiba Corp | Paper sheet handling apparatus |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016021145A1 (en) * | 2014-08-04 | 2016-02-11 | パナソニックIpマネジメント株式会社 | Electronic locker |
| JPWO2016021145A1 (en) * | 2014-08-04 | 2017-05-18 | パナソニックIpマネジメント株式会社 | Electronic locker |
| US10242522B2 (en) | 2014-08-04 | 2019-03-26 | Panasonic Intellectual Property Management Co., Ltd. | Electronic locker |
| JP2016112040A (en) * | 2014-12-11 | 2016-06-23 | 富士通株式会社 | Bed area extraction method, bed area extraction device and bed area extraction program |
| JP2016177754A (en) * | 2015-03-23 | 2016-10-06 | 日本電気株式会社 | Character extraction device, character extraction method, and character extraction program |
| CN106855948A (en) * | 2016-12-13 | 2017-06-16 | 深圳市海云天科技股份有限公司 | It is a kind of to detect that answering card scanning produces the method and device of secondary pollution |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8199379B2 (en) | Optical detection apparatus, and sheet processing apparatus having the optical detection apparatus | |
| US8558205B2 (en) | Light detection device and sheet processing apparatus including the same | |
| JP5989475B2 (en) | Image reading apparatus and paper sheet processing apparatus | |
| JP2012198700A (en) | Light detection device and paper sheet processor including light detection device | |
| US5847405A (en) | Size or position sensing of intermixed sheets in a sheet stacking tray with sheet edge shadow detection | |
| JP2013070163A (en) | Image reading device, image forming device, and image reading program | |
| US9936093B2 (en) | Image reading apparatus and sheet processing apparatus | |
| JP5968042B2 (en) | Conveying apparatus and image forming apparatus | |
| JP5180054B2 (en) | Image reading apparatus, image reading system, and contour detection method | |
| JP2020046972A (en) | Paper sheet processing apparatus and paper sheet processing method | |
| CN109074697B (en) | Paper sheet identification device and paper sheet identification method | |
| US20230015962A1 (en) | Optical sensor and sheet recognition unit | |
| CN107317950B (en) | Photosensitive equipment with inclined background film and photosensitive method thereof | |
| JP7110948B2 (en) | Medium conveying device and image reading device | |
| JP5935687B2 (en) | Image reading device | |
| JPH0830785A (en) | Stamp detector | |
| JP7308030B2 (en) | Image processing device | |
| JP2001232304A (en) | Paper sheets processing device and paper sheets processing method | |
| JP2013061765A (en) | Paper sheet handling device and paper sheet handling method | |
| JP2005295407A (en) | Image reader, and image forming apparatus | |
| JP2013197689A (en) | Image reader and paper sheet processor | |
| JP2011066712A (en) | Image input device, sorting device, stamper and method of adjusting the image input device | |
| JP2014063339A (en) | Character reader | |
| JP2011095795A (en) | Device and method for reading voting sheet | |
| JP2013198084A (en) | Image reader, image forming apparatus and original end detecting method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130529 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20131205 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20131212 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20131219 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20131226 |
|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20140109 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140123 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140212 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20140701 |