JP2012196018A - 三相モータの配線構造 - Google Patents
三相モータの配線構造 Download PDFInfo
- Publication number
- JP2012196018A JP2012196018A JP2011056844A JP2011056844A JP2012196018A JP 2012196018 A JP2012196018 A JP 2012196018A JP 2011056844 A JP2011056844 A JP 2011056844A JP 2011056844 A JP2011056844 A JP 2011056844A JP 2012196018 A JP2012196018 A JP 2012196018A
- Authority
- JP
- Japan
- Prior art keywords
- phase
- stator
- housing
- parallel circuit
- conductive wire
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images







Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/64—Electric machine technologies in electromobility
Landscapes
- Windings For Motors And Generators (AREA)
- Insulation, Fastening Of Motor, Generator Windings (AREA)
Abstract
【課題】
結線箇所を少なくできると共に、結線作業を行いやすくすることができる三相モータの配線構造を提供する。
【解決手段】
直列に接続した同相の3つステータコイル22(直列接続ステータコイル群)は連続した1つの導電線U1〜U4、V1〜V4、W1〜W4により形成される。直列接続ステータコイル群は各相毎に複数備えて並列回路を構成し、各相の前記並列回路を構成する各導電線U1〜U4、V1〜V4、W1〜W4の電源側の一端は、ハウジング外部に導出されて互いにコネクタ40,60,70の雄型端子のカシメ部により結線されて、電源に接続可能にされる。各相の前記並列回路を構成する各導電線U1〜U4、V1〜V4、W1〜W4の中性点側の一端は、ハウジング外部に導出されて互いに結線されている。
【選択図】図2
結線箇所を少なくできると共に、結線作業を行いやすくすることができる三相モータの配線構造を提供する。
【解決手段】
直列に接続した同相の3つステータコイル22(直列接続ステータコイル群)は連続した1つの導電線U1〜U4、V1〜V4、W1〜W4により形成される。直列接続ステータコイル群は各相毎に複数備えて並列回路を構成し、各相の前記並列回路を構成する各導電線U1〜U4、V1〜V4、W1〜W4の電源側の一端は、ハウジング外部に導出されて互いにコネクタ40,60,70の雄型端子のカシメ部により結線されて、電源に接続可能にされる。各相の前記並列回路を構成する各導電線U1〜U4、V1〜V4、W1〜W4の中性点側の一端は、ハウジング外部に導出されて互いに結線されている。
【選択図】図2
Description
本発明は、三相モータの配線構造に関する。
従来の三相モータの配線構造を図7〜図9を参照して説明する。
図9に示す三相モータは、ハウジング100内に配置された環状のステータ102には複数のコア101が環状に配置されるとともに、前記各コア101にはU,V,W相の順にステータコイル103が巻回されている。又、ハウジング100は、前記ステータ102の内周側に配置されるとともに永久磁石105を周部に備えたロータ104を回転可能に支持している。各ステータコイル103はハウジング100外の図示しない電源に接続される。
図9に示す三相モータは、ハウジング100内に配置された環状のステータ102には複数のコア101が環状に配置されるとともに、前記各コア101にはU,V,W相の順にステータコイル103が巻回されている。又、ハウジング100は、前記ステータ102の内周側に配置されるとともに永久磁石105を周部に備えたロータ104を回転可能に支持している。各ステータコイル103はハウジング100外の図示しない電源に接続される。
上記の三相モータは、複数極/複数スロットの構成を有している。例えば、三相モータを32極36スロットで構成する場合、図8に示すように、各コア101に巻回されたステータコイル103を3つ直列接続するとともに、この直列回路を一組として、4組の並列回路を各相分とし、各相分の並列回路が、例えばスター結線されている。
図8に示すように、従来は、各相のステータコイル103は、前記直列回路では同図に黒点で示す箇所(結線箇所K)で、ステータコイル103同士が結線されている。又、各相の並列回路の中性線側及び電源側は同図に示すように、複数の結線箇所Kt,Kdにおいて、結線されている。
具体的には、図9に示すように、ハウジング100内のステータ102の側方において、ブラケット112を介して固定されたリング状の基板110が配置されている。又、基板110上には、各相毎に結線用のバスバーと中性線のための結線用のバスバーと合わせて4つのバスバーが設けられ、それらのバスバーに設けられた複数の接続孔に対して各相の前記直列回路の電源側端、前記直列回路の中性線側端がそれぞれ差し込まれて溶接等により接続されることにより、前記結線箇所Kt,Kdが構成されている。
そして、基板110の前記各相のバスバーには各相の単一のパワーケーブルKu,Kv,Kwがそれぞれ接続され、図7及び図9に示すように、ハウジング100から外部に導出されている。パワーケーブルKu,Kv,Kwの先端は、図8に示すようにそれぞれコネクタ120u,120v,120wが接続されている。
又、図8に示す、各直列回路を構成するコイル間の結線箇所Kは、それぞれ半田付けにより接続されている(以下、この従来技術を従来技術1という)。
しかしながら、上記の三相モータの配線構造では、各コイル間を半田付けする必要があるとともに、ステータの側方にブラケットを介して基板を設けるため、ハウジングにおいてロータの軸心方向の長さが長くなり大型化する問題があるとともに、結線箇所が多く配線コストが増える。
しかしながら、上記の三相モータの配線構造では、各コイル間を半田付けする必要があるとともに、ステータの側方にブラケットを介して基板を設けるため、ハウジングにおいてロータの軸心方向の長さが長くなり大型化する問題があるとともに、結線箇所が多く配線コストが増える。
前記配線コストの低減、及び、モータの小型化を図るために、従来から、三相モータの配線コストを低減するために、種々の方法が提案されている。
又、特許文献1のインホイールモータでは、環状のステータコアにステータコイルを巻回した複数のボビンが配列されて、前記各ボビンにステータコイルからの配線を支持するホルダ部が設けられている。前記ホルダ部に支持された前記各相の配線はハウジング内に設けられた基板の各相別の端子に対して接続されている。そして、前記基板の各相の端子には、電源に接続された各相のパワーケーブルが接続されている(以下、この従来技術を従来技術2という)。
又、特許文献1のインホイールモータでは、環状のステータコアにステータコイルを巻回した複数のボビンが配列されて、前記各ボビンにステータコイルからの配線を支持するホルダ部が設けられている。前記ホルダ部に支持された前記各相の配線はハウジング内に設けられた基板の各相別の端子に対して接続されている。そして、前記基板の各相の端子には、電源に接続された各相のパワーケーブルが接続されている(以下、この従来技術を従来技術2という)。
この構成により、インホイールモータの車幅方向の縮小化してインホイールモータを小型化することができる利点がある。
特許文献2では、鉄心に巻回した複数のコイルを環状に配置してステータを構成し、各コイルの径方向の内側から引き出した巻線の端部を結線端子を介して、多角形状に形成した中性点バスリングに対して結線することが提案されている(以下、この従来技術を従来技術3という)。このことにより、結線作業を容易化できる利点がある。
特許文献2では、鉄心に巻回した複数のコイルを環状に配置してステータを構成し、各コイルの径方向の内側から引き出した巻線の端部を結線端子を介して、多角形状に形成した中性点バスリングに対して結線することが提案されている(以下、この従来技術を従来技術3という)。このことにより、結線作業を容易化できる利点がある。
特許文献3では、3相モータにおいて、各相の巻線一端側の最端部のコイルの前記巻線一端側部分を1番目の渡り線とし、各相の巻線他端側の最端部のコイルの前記巻線他端側部分を(n+1)番目の渡り線とし、各相毎に前記巻線一端側部分から数えて(i−1)番目のコイルとi番目のコイルの間をi番目の渡り線とし、各相の奇数番目の渡り線を各相毎に一つにまとめて結線して電源線とするとともに、各相の偶数番目の渡り線同士を各相間一つにまとめて結線して中性点とするようにしている(以下、この従来技術を従来技術4という)。この構成により、電源線及び中性点の結線本数を低減できる利点がある。
上記従来技術1乃至従来技術4に見られる様に、一般にハウジング内で結線が行われているため、配線をするために用いる絶縁材料や、樹脂部品はフッ素系の材料を用いることが多くなり、コストアップの原因となる。
又、従来技術1のようにハウジング内で結線を行うために半田付けした場合、使用時にモータが高温になると、半田付けした結線箇所の信頼性確保が必要になる。
本発明の目的は、上記課題を解決して、結線箇所を少なくできると共に、結線作業を行いやすくすることができる三相モータの配線構造を提供することにある。
本発明の目的は、上記課題を解決して、結線箇所を少なくできると共に、結線作業を行いやすくすることができる三相モータの配線構造を提供することにある。
上記問題点を解決するために、請求項1の発明は、ハウジング内に配置されるとともに環状に配列されたステータコアを有するステータであって、直列に接続した同相の複数のステータコイルが各相順に前記ステータコアに巻回されたステータと、前記ステータ内に配置されて前記ハウジングに回転自在に支持されたロータを有する三相モータの配線構造において、前記直列に接続した同相の複数のステータコイル(以下、直列接続ステータコイル群という)は連続した1つの導電線により形成され、前記直列接続ステータコイル群は、各相毎に複数備えて、並列回路を構成し、前記各相の前記並列回路を構成する前記各導電線の電源側の一端は、前記ハウジング外部に導出されて互いに第1結線手段により結線されて、電源に接続可能にされ、前記各相の前記並列回路を構成する前記各導電線の中性点側の一端は、前記ハウジング外部に導出されて第2結線手段により互いに結線されていることを特徴とする三相モータの配線構造を要旨としている。
請求項2の発明は、請求項1において、前記各相の前記並列回路を構成する前記各導電線において、最も中性点側に位置するステータコイルから、前記中性点側の結線部位までの長さは、各相が互いに同じ長さになるように配置されていることを特徴とする。
請求項3の発明は、請求項1又は請求項2において、前記第1結線手段は、前記電源と接続可能なコネクタ内に設けられていることを特徴とする。
請求項4の発明は、ハウジング内に配置されるとともに環状に配列されたステータコアを有するステータであって、ステータコイルが各相順に前記ステータコアに巻回されたステータと、前記ステータ内に配置されて前記ハウジングに回転自在に支持されたロータを有する三相モータの配線構造において、前記ステータコイルは1つの導電線により形成され、前記ステータコイルは、各相毎に複数備えて、並列回路を構成し、前記各相の前記並列回路を構成する前記各導電線の電源側の一端は、前記ハウジング外部に導出されて互いに第1結線手段により結線されて、電源に接続可能にされ、前記各相の前記並列回路を構成する前記各導電線の中性点側の一端は、前記ハウジング外部に導出されて第2結線手段により互いに結線されていることを特徴とする三相モータの配線構造を要旨としている。
請求項4の発明は、ハウジング内に配置されるとともに環状に配列されたステータコアを有するステータであって、ステータコイルが各相順に前記ステータコアに巻回されたステータと、前記ステータ内に配置されて前記ハウジングに回転自在に支持されたロータを有する三相モータの配線構造において、前記ステータコイルは1つの導電線により形成され、前記ステータコイルは、各相毎に複数備えて、並列回路を構成し、前記各相の前記並列回路を構成する前記各導電線の電源側の一端は、前記ハウジング外部に導出されて互いに第1結線手段により結線されて、電源に接続可能にされ、前記各相の前記並列回路を構成する前記各導電線の中性点側の一端は、前記ハウジング外部に導出されて第2結線手段により互いに結線されていることを特徴とする三相モータの配線構造を要旨としている。
請求項5の発明は、請求項4において、前記各相の前記並列回路を構成する前記各導電線から、前記中性点側の結線部位までの長さは、各相が互いに同じ長さになるように配置されていることを特徴とする。
請求項6の発明は、請求項4又は請求項5において、前記第1結線手段は、前記電源と接続可能なコネクタ内に設けられていることを特徴とする。
請求項1及び請求項4の発明によれば、従来に比して結線箇所を少なくできると共に、結線作業を行いやすくすることができる三相モータの配線構造を提供できる。
請求項2及び請求項5の発明によれば、各相のステータコイルから、中性点側の結線部位までの長さは、各相が互いに同じ長さになるように配置されていることにより、各相間において、抵抗値のばらつきを低減できる。
請求項2及び請求項5の発明によれば、各相のステータコイルから、中性点側の結線部位までの長さは、各相が互いに同じ長さになるように配置されていることにより、各相間において、抵抗値のばらつきを低減できる。
請求項3及び請求項6の発明によれば、ハウジングの外部に配置されるコネクタ内で、各相の並列回路を構成する各導電線の電源側の一端を結線する第1結線手段を、コネクタにより覆い隠すことができる。
以下、本発明の三相モータの配線構造をインホイールモータに具体化した一実施形態を図1〜図6を参照して説明する。なお、インホイールモータは、車体の左右後輪(或いは左右前輪)にそれぞれ設けられるが、説明の便宜上、本実施形態では、車体の右後輪に設けられたインホイールモータについて説明する。
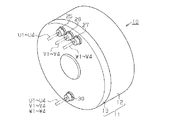
図1、図3(a)に示すように、インホイールモータ10のハウジング11は、有底円筒状のハウジング本体12と、ハウジング本体12の開口を覆うカバー体13とから構成されている。ハウジング本体12とカバー体13とは、図3(a)に示すように左右より結合されて図示しないボルト等により固定されている。ハウジング本体12は車体側から延出された図示しないストラット及び図示しないロアアームに連結されることにより、インホイールモータ10全体が図示しない車体に支持されている。
ハウジング11内にはロータ15が図3(a)において左右方向(車幅方向)に延びるように配設されて、その軸の両端がハウジング本体12及びカバー体13に対し、ベアリング17,18により回動自在に支持されている。又、前記軸の一端(右端)は、ハウジング本体12から外部に突出されるとともに図示しないギヤ機構を介して図示しないホイールハブに設けられたスピンドル軸に連結される。ロータ15の外周には複数の永久磁石16が固定されている。
ハウジング本体12の内周には、図3(a)、図4に示すように、環状のステータ20が固定されている。ステータ20は、多数枚の電磁鋼板を積層して形成されている。ステータ20の内周には、複数のステータコア21がロータ15の軸心に向かって突出されて環状に配置されている。又、ステータコア21は永久磁石16の外周に対してエアギャップを介して相対向するように配置されている。複数のステータコア21は、等間隔をおいて配置されている。各ステータコア21には、絶縁被膜が被覆されたステータコイル22が巻回された絶縁性合成樹脂からなる複数のボビン23が嵌合固定されている。
本実施形態では、インホイールモータ10は、ステータ20及びロータ15により、32極36スロットのモータとして構成されている。
ここで、U相のステータコイル22について説明する。
ここで、U相のステータコイル22について説明する。
U相では、図2に示すように、3つのステータコイル22が直列接続された直列回路を4組有する。この4組の直列回路は、後述する第1結線手段及び第2結線手段により、互いに並列に接続されて並列回路を構成する。3つのステータコイル22からなる前記直列回路は、連続した1つの導電線により構成されている。前記直列回路は、直列接続ステータコイル群に相当する。
図2では、U相の各ステータコイル22には、Unmの符号を付す。ここで、nは、並列回路の識別(本実施形態では1〜4)符号を示し、mは電源側に近位の順番(a〜c)を示す。又、各直列回路を構成する導電線には、前記nに合わせてそれぞれU1〜U4を付す。
V相及びW相のステータコイル22においてもU相と同数のステータコイル22により、U相と同様の直列回路並びに並列回路を有する。又、V相及びW相においても、3つのステータコイル22からなる前記直列回路は、連続した1つの導電線により構成されている。前記直列回路は、直列接続ステータコイル群に相当する。図2では、U相と同様に、V相及びW相のステータコイル22にVnm,Wnmの符号を付す。又、V相及びW相において、各直列回路を構成する導電線には、前記nに合わせてそれぞれV1〜V4、並びにW1〜W4を付す。
図4にはステータ20に配置された、U相,V相、W相に関するステータコイル22(U1a〜U1c,V1a〜V1c、W1a〜W1c、U2a〜U2c,V2a〜V2c、W2a〜W2c、U3a〜U3c,V3a〜V3c、W3a〜W3c、U4a〜U4c,V4a〜V4c、W4a〜W4c)の配置順を示している。図4に示すように、各相の3つのステータコイル22からなる前記直列回路は、U,V,Wの順にステータコア21に対して配置されている。図4に示すように、U1a〜U1c,V1a〜V1c、W1a〜W1cが順に配置されるともに、U2a〜U2c,V2a〜V2c、W2a〜W2cが順に配置される。又、同様にU3a〜U3c,V3a〜V3c、W3a〜W3c、並びにU4a〜U4c,V4a〜V4c、W4a〜W4cが順に配置されている。
U相において、導電線U1は、ステータコアU1a〜U1cを形成するように各ステータコア21に嵌合されたボビン23に順に巻回されている。又、ステータコイルU1aの巻始め部位から延びる電源側の部位は、図4、図3(a)において、P1で示す位置からカバー体13の左側壁に貫通して固定された絶縁性の絶縁性合成樹脂からなるグロメット25を介して外部に導出されている。又、導電線U1において、ステータコアU1cの巻終わり部位から中性点側の部位は、図3(a)、図4に示すように、カバー体13の内側面に沿って配置されるとともに、Q1で示す位置からカバー体13の左側壁に貫通して固定された絶縁性の絶縁性合成樹脂からなるグロメット30を介して外部に導出されている。なお、グロメット30の位置、グロメット25の位置とはロータ15の軸心を中心にして略180度反対位置に位置している。
又、図4に示す導電線U2は、ステータコアU2a〜U2cを形成するように各ステータコア21に嵌合されたボビン23に順に巻回されている。又、ステータコイルU2aの巻始め部位から延びる電源側の部位は、図4、図3(a)に示すようにカバー体13の内側面に沿って配置されるとともに、P2で示す位置から屈曲されて前記グロメット25を介して外部に導出されている。又、導電線U2において、ステータコアU2cの巻終わり部位から中性点側の部位は、図3(a)、図4に示すように、カバー体13の内側面に沿って配置されるとともに、Q2で示す位置で屈曲されてグロメット30を介して外部に導出されている。
図4に示す導電線U3は、ステータコアU3a〜U3cを形成するように各ステータコア21に嵌合されたボビン23に順に巻回されている。又、ステータコイルU3aの巻始め部位から延びる電源側の部位は、前記導電線U1,U2と同様にカバー体13の内側面に沿って配置されるとともに、P3で示す位置から前記グロメット25を介して外部に導出されている。又、導電線U3において、ステータコアU3cの巻終わり部位から中性点側の部位は、前記導電線U1,U2と同様にカバー体13の内側面に沿って配置されるとともに、図4に示すQ3で示す位置からグロメット30を介して外部に導出されている。
図4に示す導電線U4は、ステータコアU4a〜U4cを形成するように各ステータコア21に嵌合されたボビン23に順に巻回されている。又、ステータコイルU4aの巻始め部位から延びる電源側の部位は、前記導電線U1,U2と同様にカバー体13の内側面に沿って配置されるとともに、P4で示す位置から前記グロメット25を介して外部に導出されている。又、導電線U4において、ステータコアU4cの巻終わり部位から中性点側の部位は、前記導電線U1,U2と同様にカバー体13の内側面に沿って配置されるとともに、図4に示すQ4で示す位置からグロメット30を介して外部に導出されている。
又、導電線U1〜U4は、同じ仕様の導電線から形成されるとともに後述する電源側の第1結線手段及び中性点側の第2結線手段の間の電気抵抗が同じとなるように同じ長さを有している。又、各導電線U1〜U4において、各ステータコイルの巻数が同じ場合、各ステータコイルの巻長さの合計長と、各ステータコイル間を渡らせる導電線の長さの合計長は、いずれも同じである。一方、各導電線U1〜U4において、第1結線手段から、電気回路的に最も電源側に位置するステータコイル(Unmのmがaのもの)の巻始め迄の長さが異なる。このため、その分を電気回路的に最も中性点側に位置するステータコイル22(Unmのmがcのもの)の巻終わり位置から第2結線手段迄の長さを調整することにより、導電線U1〜U4の電気抵抗が同じとなるようにされている。
V相及びW相に関する導電線V1〜V4、W1〜W4においても、U相の導電線U1〜U4について上記説明したことと同様に構成することにより、図2に示す各ステータコイルV1a〜V1c、V2a〜V2c、V3a〜V3c、V4a〜V4c、W1a〜W1c、W2a〜W2c、W3a〜W3c、W4a〜W4cが構成されるとともに、ハウジング11内に配置されている。
図2に示す各導電線V1〜V4において、ステータコイルV1a、V2a,V3a,V4aの巻始め部位から延びる電源側の部位は、カバー体13の左側壁に貫通して固定された絶縁性の絶縁性合成樹脂からなるグロメット26(図1参照)を介して外部に導出されている。
又、各導電線V1〜V4において、ステータコアV1c〜V4cの巻終わり部位から中性点側の部位は、前記導電線U1〜U4と同様にカバー体13の内側面に沿って配置されるとともに、グロメット30を介して外部に導出されている。
図2に示す各導電線W1〜W4において、ステータコイルW1a、W2a,W3a,W4aの巻始め部位から延びる電源側の部位は、カバー体13の左側壁に貫通して固定された絶縁性の絶縁性合成樹脂からなるグロメット27(図1参照)を介して外部に導出されている。
又、各導電線W1〜W4において、ステータコアW1c〜W4cの巻終わり部位から中性点側の部位は、前記導電線U1〜U4と同様にカバー体13の内側面に沿って配置されるとともに、グロメット30を介して外部に導出されている。
図5には、上記のようにしてステータコイルが各ステータコア21に嵌合されたボビン23(図3参照)に巻回された巻方向が、示されている。同図において、○に黒丸の印は、紙面から表面方向に向かって巻回され、○に×の印は、紙面から裏面方向に向かって巻回されていることを示している。図5では全体の略1/4が示されているが残りの3/4は、図5に示した巻装状態が繰り返されている。
又、導電線V1〜V4、W1〜W4は、同じ仕様の導電線から形成されるとともに後述する電源側の第1結線手段及び中性点側の第2結線手段の間の電気抵抗が同じとなるように同じ長さを有している。又、各導電線V1〜V4、W1〜W4において、各ステータコイルの巻数が同じ場合、各ステータコイルの巻長さの合計長と、各ステータコイル間を渡らせる導電線の長さの合計長は、いずれも同じである。一方、各導電線V1〜V4、W1〜W4において、第1結線手段から、電気回路的に最も電源側に位置するステータコイル(Vnm,Wnmのmがaのもの)の巻始め迄の長さが異なる。このため、その分を電気回路的に最も中性点側に位置するステータコイル22(Vnm,Wnmのmがcのもの)の巻終わり位置から第2結線手段迄の長さを調整することにより、導電線V1〜V4、W1〜W4の電気抵抗が同じとなるようにされている。
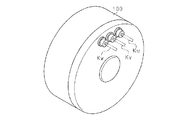
グロメット25〜27を介して図1に示すようにハウジング11の外部に導出された各相の導電線U1〜U4、V1〜V4、W1〜W4は、それぞれコネクタに接続されている。コネクタに対する導電線の接続は、各相同じであるため、以下では、図3(a)、(b)に示すコネクタ40に対するU相の導電線U1〜U4の接続構造について説明する。なお、V相,W相のコネクタには、それぞれ図2に示すように符号60,70を付す。
図3(b)に示すように、コネクタ40は、コネクタハウジング42が絶縁性の合成樹脂から有底筒状に形成されたコネクタハウジング42と、コネクタハウジング42の底部に装着されるとともに、基端にカシメ部45を有し、先端に接続端子46を有するとともに雄型端子47から構成されている。コネクタハウジング42は、前記カシメ部45を覆う小径部42aと、接続端子46を覆うとともに、小径部42aよりも大径のフード部42bとから形成されている。
前記カシメ部45に対して前記導電線U1〜U4を束ねた状態でヒュージング(熱カシメ)が行われることにより前記カシメ部45と導電線U1〜U4とは一体に接続されている。この接続により、導電線U1〜U4は互いに結線されている。本実施形態では、前記カシメ部45が第1結線手段に相当する。
コネクタ40は、図示しない電源のU相に接続された図示しない雌型のコネクタと着脱自在に接続される。
グロメット30を介して図1に示すようにハウジング11の外部に導出された各相の導電線U1〜U4、V1〜V4、W1〜W4は、図3(b)、図6に示すように絶縁性の合成樹脂よりなる絶縁部材50内に固定された結線金具52に接続されている。
グロメット30を介して図1に示すようにハウジング11の外部に導出された各相の導電線U1〜U4、V1〜V4、W1〜W4は、図3(b)、図6に示すように絶縁性の合成樹脂よりなる絶縁部材50内に固定された結線金具52に接続されている。
結線金具52には、カシメ部54が形成され、前記カシメ部54に対して前記導電線U1〜U4、V1〜V4、W1〜W4を束ねた状態でヒュージング(熱カシメ)が行われることにより前記カシメ部54と導電線U1〜U4、V1〜V4、W1〜W4とは一体に接続されている。この接続により、導電線U1〜U4、V1〜V4、W1〜W4は互いに結線されて中性点を形成する。本実施形態では、前記カシメ部54が第2結線手段に相当する。
絶縁部材50は、前記カシメ部54を固定する部位(固定部)より反固定部側は筒状のフード50aが形成されている。フード50aにはキャップ56が着脱自在に螺着されてフード50aの開口が閉塞されている。キャップ56が絶縁部材50に着脱自在に螺着されることにより、フード50a内に一部露出した、結線金具52の点検が可能である。
(実施形態の作用)
さて、上記のように構成されたインホイールモータ10の作用を説明する。
各相の導電線U1〜U4、V1〜V4、W1〜W4は、直列回路を構成するステータコイル22では、全て連続して巻回されてコイルが形成されている。
さて、上記のように構成されたインホイールモータ10の作用を説明する。
各相の導電線U1〜U4、V1〜V4、W1〜W4は、直列回路を構成するステータコイル22では、全て連続して巻回されてコイルが形成されている。
このため、ステータコイル22に使用する導電線(マグネットワイヤ)を長くするのみで実施でき、直列回路を構成するステータコイル22間では結線作業が必要ではないため、低コスト化を図ることができる。
又、導電線U1〜U4、V1〜V4、W1〜W4において、各相において並列回路を構成する場合、全てハウジング11外部のコネクタ40,60,70の中で電源側の端部は結線されるとともに、中性点側は、ハウジング11外部の結線金具52により結線される。
このため、導電線の結線作業(本実施形態ではヒュージングで結線作業を行う)は、ハウジング11の外部で行うだけでよくなり、ハウジング内部で結線作業行う場合に比して、結線作業が行いやすい。
又、本実施形態では、各導電線U1〜U4、V1〜V4、W1〜W4において、カシメ部45(第1結線手段)から、電気回路的に最も電源側に位置するステータコイル(Unm,Vnm,Wnmのmがaのもの)の巻始め迄の長さが異なる。このため、その分を電気回路的に最も中性点側に位置するステータコイル22(Unm,Vnm,Wnmのmがcのもの)の巻終わり位置からカシメ部54迄の長さを調整することにより、導電線U1〜U4、V1〜V4、W1〜W4の電気抵抗が同じとなるようにされている。このため、導電線U1〜U4、V1〜V4、W1〜W4における各相間の抵抗のばらつきがなくなる。
本実施形態では、下記の特徴を有する。
(1) 本実施形態のインホイールモータ10は、直列に接続した同相の3つステータコイル22(直列接続ステータコイル群)は連続した1つの導電線U1〜U4、V1〜V4、W1〜W4により形成されている。又、前記直列接続ステータコイル群は、各相毎に複数備えて、並列回路を構成し、各相の前記並列回路を構成する各導電線U1〜U4、V1〜V4、W1〜W4の電源側の一端は、ハウジング11外部に導出されて互いに雄型端子47のカシメ部45(第1結線手段)により結線されて、電源に接続可能にされている。又、各相の前記並列回路を構成する各導電線U1〜U4、V1〜V4、W1〜W4の中性点側の一端は、ハウジング11外部に導出されて結線金具52のカシメ部54(第2結線手段)により互いに結線されている。
(1) 本実施形態のインホイールモータ10は、直列に接続した同相の3つステータコイル22(直列接続ステータコイル群)は連続した1つの導電線U1〜U4、V1〜V4、W1〜W4により形成されている。又、前記直列接続ステータコイル群は、各相毎に複数備えて、並列回路を構成し、各相の前記並列回路を構成する各導電線U1〜U4、V1〜V4、W1〜W4の電源側の一端は、ハウジング11外部に導出されて互いに雄型端子47のカシメ部45(第1結線手段)により結線されて、電源に接続可能にされている。又、各相の前記並列回路を構成する各導電線U1〜U4、V1〜V4、W1〜W4の中性点側の一端は、ハウジング11外部に導出されて結線金具52のカシメ部54(第2結線手段)により互いに結線されている。
この結果、本実施形態によれば、従来に比して結線箇所を少なくできると共に、結線作業を行いやすくすることができる。
又、従来、扁平形状で構成され、大トルクが求められるモータ、例えば、インホイールモータでは、大電流を流す必要があり、このため、モータが発熱量が大きいものが多い。このため、従来から、この種のモータは、150℃以上の高温領域において、使用されることが多い。
又、従来、扁平形状で構成され、大トルクが求められるモータ、例えば、インホイールモータでは、大電流を流す必要があり、このため、モータが発熱量が大きいものが多い。このため、従来から、この種のモータは、150℃以上の高温領域において、使用されることが多い。
150℃以上の高温領域において、使用されるモータは信頼性の確保のために、150℃以上の耐熱温度を持つ絶縁材料及び合成樹脂などを用いている。このため、フッ素系の材料を用いることが多くなり、コストアップの要因となっている。このようにコストアップを軽減するために、前記特許文献1〜特許文献3のコスト低減対策が提案されている。
本実施形態では、コスト低減のために、結線箇所を減少させることにより、結線処理の組立工数を、特に、多極多スロット形式のモータにおいて、大きな効果を奏することが期待できる。
具体的に、従来例と比較する。図8の従来例が、32極36スロットのモータを構成しているとすると、この場合、結線箇所は67箇所必要であるのに対して、本実施形態では、4箇所に激減することが分かる。
(2) 本実施形態のインホイールモータ10は、各相の前記並列回路を構成する各導電線U1〜U4、V1〜V4、W1〜W4において、最も中性点側に位置するステータコイルから、中性点側の結線部位までの長さは、各相が互いに同じ長さになるように配置されていることにより、各相間において、抵抗値のばらつきを低減できる。
(3) 本実施形態のインホイールモータ10では、雄型端子47のカシメ部45(第1結線手段)は、電源と接続可能なコネクタ40,60,70内に設けられている。この結果、ハウジング11の外部に配置されるコネクタ40,60,70内で、各相の並列回路を構成する各導電線の電源側の一端を結線する雄型端子47のカシメ部45を、コネクタにより覆い隠すことができる。
なお、本発明の実施形態は前記実施形態に限定されるものではなく、下記のように変更しても良い。
・ 前記実施形態のモータはインホイールモータ10としたが、インホイールモータ10に限定されるものではなく、インホイールモータ10以外の他の三相モータに具体化してもよい。
・ 前記実施形態のモータはインホイールモータ10としたが、インホイールモータ10に限定されるものではなく、インホイールモータ10以外の他の三相モータに具体化してもよい。
・ 前記実施形態では、各相の導電線U1〜U4、V1〜V4、W1〜W4は、コネクタ40,60,70に、第1結線手段である雄型端子47のカシメ部45(第1結線手段)としたが、第1結線手段はコネクタの雄型端子47のカシメ部45に限定されない。例えば、カシメ部を有する接続金具の当該カシメ部で、まず各相の導電線U1〜U4、V1〜V4、W1〜W4を一旦互いにヒュージングで結線し、その接続金具と、コネクタに内装される接続端子とを単一のリード線等により接続を行うようにしてもよい。この場合、前記接続金具は、合成樹脂からなる絶縁カバー体で覆うものとする。
・ 前記実施形態では、インホイールモータ10を、32極36スロットのモータとして構成したが、極数及びスロット数は限定されるものではない。
例えば、前記実施形態では、直列接続ステータコイル群として、各相の導電線U1〜U4、V1〜V4、W1〜W4では、3つのステータコイル22で直列回路を構成した。
例えば、前記実施形態では、直列接続ステータコイル群として、各相の導電線U1〜U4、V1〜V4、W1〜W4では、3つのステータコイル22で直列回路を構成した。
この構成の代わりに、各相の導電線U1〜U4、V1〜V4、W1〜W4において、1つのステータコイルのみを形成して、各相において、4つのステータコイルで並列回路を構成するようにしてもよい。この場合、ステータのコイル数に合わせて、ロータ側の永久磁石の数を減少させるとともに、他の構成は、前記実施形態と同様に構成するようにする。
勿論、前記実施形態において、直列回路を構成するステータコイル22の数を増減したり、並列回路を構成する直列回路の数を増減するようにしてもよい。
・ なお、前記実施形態において、第2結線手段である結線金具52に変えて、コネクタとしてもよい。この場合、当該コネクタの構成は、前記実施形態のカシメ部45及び接続端子46を備える雄型端子47、及びコネクタ40と同様の構成とする。この場合、中性点を用いて充電を行うシステムの場合に、このコネクタを利用することができる。又、中性点の電位を知るために、このコネクタを利用することができる。
・ なお、前記実施形態において、第2結線手段である結線金具52に変えて、コネクタとしてもよい。この場合、当該コネクタの構成は、前記実施形態のカシメ部45及び接続端子46を備える雄型端子47、及びコネクタ40と同様の構成とする。この場合、中性点を用いて充電を行うシステムの場合に、このコネクタを利用することができる。又、中性点の電位を知るために、このコネクタを利用することができる。
・ 前記コネクタは、雄型としたが、雌型であってもよい。
・ 前記実施形態では、結線作業をヒュージングで行ったが、各導電線の絶縁被覆をはぎ取った後、カシメ部45,54によりカシメ着したり、半田付けしてもよい。
・ 前記実施形態では、結線作業をヒュージングで行ったが、各導電線の絶縁被覆をはぎ取った後、カシメ部45,54によりカシメ着したり、半田付けしてもよい。
U1〜U4…導電線、V1〜V4…導電線、W1〜W4…導電線、
11…ハウジング、15…ロータ、20…ステータ、
21…ステータコア、22…ステータコイル、
40,60,70…コネクタ。
11…ハウジング、15…ロータ、20…ステータ、
21…ステータコア、22…ステータコイル、
40,60,70…コネクタ。
Claims (6)
- ハウジング内に配置されるとともに環状に配列されたステータコアを有するステータであって、直列に接続した同相の複数のステータコイルが各相順に前記ステータコアに巻回されたステータと、
前記ステータ内に配置されて前記ハウジングに回転自在に支持されたロータを有する三相モータの配線構造において、
前記直列に接続した同相の複数のステータコイル(以下、直列接続ステータコイル群という)は連続した1つの導電線により形成され、
前記直列接続ステータコイル群は、各相毎に複数備えて、並列回路を構成し、
前記各相の前記並列回路を構成する前記各導電線の電源側の一端は、前記ハウジング外部に導出されて互いに第1結線手段により結線されて、電源に接続可能にされ、
前記各相の前記並列回路を構成する前記各導電線の中性点側の一端は、前記ハウジング外部に導出されて第2結線手段により互いに結線されていることを特徴とする三相モータの配線構造。 - 前記各相の前記並列回路を構成する前記各導電線において、最も中性点側に位置するステータコイルから、前記中性点側の結線部位までの長さは、各相が互いに同じ長さになるように配置されていることを特徴とする請求項1に記載の三相モータの配線構造。
- 前記第1結線手段は、前記電源と接続可能なコネクタ内に設けられていることを特徴とする請求項1又は請求項2に記載の三相モータの配線構造。
- ハウジング内に配置されるとともに環状に配列されたステータコアを有するステータであって、ステータコイルが各相順に前記ステータコアに巻回されたステータと、
前記ステータ内に配置されて前記ハウジングに回転自在に支持されたロータを有する三相モータの配線構造において、
前記ステータコイルは1つの導電線により形成され、
前記ステータコイルは、各相毎に複数備えて、並列回路を構成し、
前記各相の前記並列回路を構成する前記各導電線の電源側の一端は、前記ハウジング外部に導出されて互いに第1結線手段により結線されて、電源に接続可能にされ、
前記各相の前記並列回路を構成する前記各導電線の中性点側の一端は、前記ハウジング外部に導出されて第2結線手段により互いに結線されていることを特徴とする三相モータの配線構造。 - 前記各相の前記並列回路を構成する前記各導電線から、前記中性点側の結線部位までの長さは、各相が互いに同じ長さになるように配置されていることを特徴とする請求項4に記載の三相モータの配線構造。
- 前記第1結線手段は、前記電源と接続可能なコネクタ内に設けられていることを特徴とする請求項4又は請求項5に記載の三相モータの配線構造。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011056844A JP2012196018A (ja) | 2011-03-15 | 2011-03-15 | 三相モータの配線構造 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011056844A JP2012196018A (ja) | 2011-03-15 | 2011-03-15 | 三相モータの配線構造 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012196018A true JP2012196018A (ja) | 2012-10-11 |
Family
ID=47087445
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011056844A Withdrawn JP2012196018A (ja) | 2011-03-15 | 2011-03-15 | 三相モータの配線構造 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012196018A (ja) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015076209A1 (ja) * | 2013-11-19 | 2015-05-28 | Ntn株式会社 | 駆動転舵モジュールと、駆動転舵モジュールを備えた車両 |
| JP2015211603A (ja) * | 2014-04-30 | 2015-11-24 | 三菱電機株式会社 | 電動機、密閉型圧縮機及び冷凍サイクル装置 |
| JP2019516336A (ja) * | 2016-04-27 | 2019-06-13 | エルジー イノテック カンパニー リミテッド | パワーターミナルおよびそれを含むモーター |
-
2011
- 2011-03-15 JP JP2011056844A patent/JP2012196018A/ja not_active Withdrawn
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2015076209A1 (ja) * | 2013-11-19 | 2015-05-28 | Ntn株式会社 | 駆動転舵モジュールと、駆動転舵モジュールを備えた車両 |
| JP2015211603A (ja) * | 2014-04-30 | 2015-11-24 | 三菱電機株式会社 | 電動機、密閉型圧縮機及び冷凍サイクル装置 |
| JP2019516336A (ja) * | 2016-04-27 | 2019-06-13 | エルジー イノテック カンパニー リミテッド | パワーターミナルおよびそれを含むモーター |
| US11152824B2 (en) | 2016-04-27 | 2021-10-19 | Lg Innotek Co., Ltd. | Power terminal and motor including same |
| JP6991998B2 (ja) | 2016-04-27 | 2022-01-13 | エルジー イノテック カンパニー リミテッド | パワーターミナルおよびそれを含むモーター |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5687048B2 (ja) | バスバー装置、ステータ、ブラシレスモータ及びバスバー装置の製造方法 | |
| US8922079B2 (en) | Electric motor and centralized power distribution member | |
| US9079603B2 (en) | Motor for an electric power steering apparatus | |
| US7327063B2 (en) | Rotary electric machine for vehicles | |
| TWI735185B (zh) | 定子及電動機 | |
| CN108886283B (zh) | 马达 | |
| US9479020B2 (en) | Electric machine with stator's welded-side pitch less that rotor's pitch | |
| US9847684B2 (en) | Stator and rotating electric machine | |
| JP2007174869A (ja) | インシュレータ、ステータアセンブリ、セグメントステータ、及び回転電機用ステータ | |
| US9641036B2 (en) | Rotary electric machine | |
| JP5991261B2 (ja) | 電動機の製造方法 | |
| JP2006246594A (ja) | 回転電機の配線部材 | |
| JP5019558B2 (ja) | 集中配電部品 | |
| US20210359562A1 (en) | Stator and manufacturing method of the same | |
| US20220077728A1 (en) | Stator | |
| JP6443303B2 (ja) | 回転電機ステータ | |
| JP2015501125A (ja) | 接触コネクタ付き電気機械 | |
| JP2009124772A (ja) | モータおよび電気式動力舵取装置 | |
| JP2012196018A (ja) | 三相モータの配線構造 | |
| WO2013054401A1 (ja) | 回転電機の口出し線接続構造 | |
| JP6946992B2 (ja) | 回転電機 | |
| JP6165454B2 (ja) | 回転電機 | |
| US20110291521A1 (en) | Stator for an induction motor | |
| CN111886781A (zh) | 旋转电机的电连接装置 | |
| EP2398131A2 (en) | Wiring component of rotating electrical machine for vehicle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20140603 |