JP2012144141A - Traveling body of tracklaying vehicle - Google Patents
Traveling body of tracklaying vehicle Download PDFInfo
- Publication number
- JP2012144141A JP2012144141A JP2011003835A JP2011003835A JP2012144141A JP 2012144141 A JP2012144141 A JP 2012144141A JP 2011003835 A JP2011003835 A JP 2011003835A JP 2011003835 A JP2011003835 A JP 2011003835A JP 2012144141 A JP2012144141 A JP 2012144141A
- Authority
- JP
- Japan
- Prior art keywords
- grease
- greasing
- slider
- hydraulic motor
- crawler belt
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Landscapes
- Fluid-Pressure Circuits (AREA)
Abstract
Description
本発明は、例えば油圧ショベル、油圧クレーン等の履帯を備えた装軌式車両の走行体に関する。 The present invention relates to a traveling body of a tracked vehicle having a crawler track such as a hydraulic excavator or a hydraulic crane.
一般に、油圧ショベル、油圧クレーン等の装軌式車両は、自走可能な下部走行体と、該下部走行体上に旋回可能に搭載された上部旋回体と、該上部旋回体に設けられた作業装置とにより大略構成されている。 In general, a tracked vehicle such as a hydraulic excavator or a hydraulic crane has a self-propelled lower traveling body, an upper revolving body that is turnably mounted on the lower traveling body, and work provided on the upper revolving body. It is roughly constituted by the device.
ここで、例えば大型の装軌式車両の下部走行体は、センタフレームと該センタフレームの左,右両側で前,後方向に延びたサイドフレームとを有するトラックフレームと、該トラックフレームの各サイドフレームの長さ方向の一側に設けられた駆動輪と、各サイドフレームの長さ方向の他側に設けられた遊動輪と、駆動輪と遊動輪とに巻回して設けられた履帯と、各サイドフレームの上面側に設けられ駆動輪と遊動輪との間で履帯を案内するスライダとにより大略構成されている(例えば、特許文献1,2参照)。
Here, for example, a lower traveling body of a large tracked vehicle includes a track frame having a center frame and side frames extending in the front and rear directions on both left and right sides of the center frame, and each side of the track frame. A drive wheel provided on one side in the length direction of the frame, an idle wheel provided on the other side in the length direction of each side frame, a crawler belt wound around the drive wheel and the idle wheel, It is generally configured by a slider that is provided on the upper surface side of each side frame and guides the crawler belt between the driving wheel and the idler wheel (see, for example,
このような下部走行体は、例えば走行用の油圧モータにより駆動輪を回転駆動することにより、該駆動輪の外周側を履帯の内側面に列設された突起に順次係合させ、該履帯を遊動輪との間で周回動作させることにより走行することができる。このとき、スライダは、履帯の内側面に摺接しつつ該履帯を下側から支持するように案内している。 Such a lower traveling body, for example, by rotationally driving the drive wheels by a traveling hydraulic motor, sequentially engages the outer peripheral side of the drive wheels with the protrusions arranged on the inner surface of the crawler belt, The vehicle can travel by rotating around the idler wheel. At this time, the slider is guided to support the crawler track from below while sliding on the inner surface of the crawler track.
従来技術によれば、互いに摺接(摩擦接触)するスライダと履帯との摩耗が進行し易く、これらスライダや履帯の寿命(交換時期)が短くなる虞がある。 According to the prior art, wear of the slider and the crawler belt that are in sliding contact with each other (friction contact) is likely to proceed, and the life (replacement time) of the slider and the crawler belt may be shortened.
本発明は上述した従来技術の問題に鑑みなされたもので、スライダと履帯との摺接による摩耗を低減することができ、これらスライダと履帯の寿命を延ばすことができる装軌式車両の走行体を提供することを目的としている。 The present invention has been made in view of the above-described problems of the prior art, and can reduce the wear caused by sliding contact between the slider and the crawler belt, and can extend the life of the slider and the crawler belt. The purpose is to provide.
上述した課題を解決するため本発明は、センタフレームと該センタフレームの左,右両側で前,後方向に延びたサイドフレームとを有するトラックフレームと、該トラックフレームの各サイドフレームの長さ方向の一側に設けられた駆動輪と、前記各サイドフレームの長さ方向の他側に設けられた遊動輪と、前記駆動輪と遊動輪とに巻回して設けられた履帯と、前記各サイドフレームに設けられ前記駆動輪と遊動輪との間で前記履帯を案内するスライダとを備えてなる装軌式車両の走行体に適用される。 In order to solve the above-described problems, the present invention provides a track frame having a center frame and side frames extending in the front and rear directions on the left and right sides of the center frame, and the length direction of each side frame of the track frame. A drive wheel provided on one side, idle wheels provided on the other side in the length direction of each side frame, crawler belts wound around the drive wheels and idle wheels, and each side The present invention is applied to a traveling body of a tracked vehicle that is provided on a frame and includes a slider that guides the crawler belt between the driving wheel and the idle wheel.
そして、請求項1の発明が採用する構成の特徴は、前記スライダと前記履帯との摺接部位に潤滑油を自動で供給する給脂装置を設ける構成としたことにある。
A feature of the configuration adopted by the invention of
請求項2の発明は、前記給脂装置は、前記摺接部位に対応して前記スライダに設けられた給脂孔と、該給脂孔に前記潤滑油を導く給脂管路とを有し、前記サイドフレームには、前記給脂管路のうち該サイドフレームから露出した部位を覆う保護カバーを設ける構成としたことにある。 According to a second aspect of the present invention, the greasing device has a greasing hole provided in the slider corresponding to the sliding contact portion, and a greasing pipe that guides the lubricating oil to the greasing hole. The side frame is provided with a protective cover that covers a portion of the grease supply pipe that is exposed from the side frame.
請求項3の発明は、油圧ポンプと、該油圧ポンプに主管路を介して接続され前記駆動輪を回転駆動する可変容量形の油圧モータと、該油圧モータの容量を可変に制御する容量制御回路と、前記主管路の途中に設けられる方向制御弁と、前記油圧モータの停止時に前記駆動輪に制動力を付与する駐車ブレーキと、前記容量制御回路の容量制御および/または前記駐車ブレーキのブレーキ制御を行うパイロット管路とを備え、前記給脂装置は、前記潤滑油を貯溜する貯油タンクと、該貯油タンク内に貯溜された潤滑油を吐出する給脂ポンプとを有し、該給脂ポンプは、前記パイロット管路のパイロット圧を動力として前記潤滑油を吐出する構成としたことにある。 According to a third aspect of the present invention, there is provided a hydraulic pump, a variable displacement type hydraulic motor connected to the hydraulic pump via a main line and rotationally driving the drive wheel, and a capacity control circuit for variably controlling the capacity of the hydraulic motor. A direction control valve provided in the middle of the main pipeline, a parking brake that applies a braking force to the drive wheel when the hydraulic motor is stopped, a capacity control of the capacity control circuit, and / or a brake control of the parking brake The grease supply device includes an oil storage tank that stores the lubricating oil, and a grease pump that discharges the lubricating oil stored in the oil storage tank. Is that the lubricating oil is discharged using the pilot pressure in the pilot line as power.
請求項1の発明によれば、スライダと履帯との摺接部位に潤滑油を自動で供給する給脂装置を設ける構成としているので、該給脂装置によりスライダと履帯との摺接部位を潤滑することができる。これにより、スライダと履帯との摩擦抵抗、摩耗を低減することができ、スライダと履帯の寿命(交換時期)を延ばすことができる。この結果、装軌式車両の走行体の耐久性、信頼性を高めることができる。 According to the first aspect of the present invention, since the lubrication device for automatically supplying the lubricating oil to the sliding contact portion between the slider and the crawler belt is provided, the sliding contact portion between the slider and the crawler belt is lubricated by the greasing device. can do. Thereby, the frictional resistance and wear between the slider and the crawler belt can be reduced, and the life (replacement time) of the slider and the crawler belt can be extended. As a result, the durability and reliability of the running body of the tracked vehicle can be improved.
請求項2の発明によれば、サイドフレームに給脂管路を覆う保護カバーを設ける構成としているので、給脂管路に土砂が直接堆積することを保護カバーにより防止することができ、給脂装置の耐久性、信頼性を高めることができる。 According to the second aspect of the present invention, the protective cover for covering the greasing pipeline is provided on the side frame, so that the protective cover can prevent sediment from being directly deposited on the greasing pipeline. The durability and reliability of the device can be improved.
請求項3の発明によれば、給脂装置を構成する給脂ポンプは、油圧モータの容量を制御する容量制御回路の容量制御および/または駐車ブレーキのブレーキ制御を行うパイロット管路のパイロット圧を動力としているので、装軌式車両の走行体の走行に合わせて給脂ポンプを駆動することができ、スライダと履帯との摺接部位を好適に潤滑することができる。これにより、更なる、耐久性、信頼性の向上を図ることができる。
According to the invention of
以下、本発明の実施の形態に係る装軌式車両の走行体として、油圧ショベルの下部走行体を例に挙げ、添付図面に従って詳細に説明する。 Hereinafter, as a traveling body of a tracked vehicle according to an embodiment of the present invention, a lower traveling body of a hydraulic excavator will be described as an example and described in detail with reference to the accompanying drawings.
図中、1は装軌式車両としての大型の油圧ショベルを示している。この油圧ショベル1は、後述する下部走行体11と、該下部走行体11上に旋回輪2を介して旋回可能に搭載された上部旋回体3と、該上部旋回体3の前側に俯仰動可能に設けられ、土砂の掘削作業等を行う作業装置4とにより大略構成されている。
In the figure,
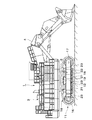
次に、11は走行体としての装軌式(クローラ式)の下部走行体を示している。この装軌式の下部走行体11は、凹凸のある地面、泥濘地等を安定して走行するためのものである。そして、下部走行体11は、後述のトラックフレーム12、走行用油圧モータ15、駆動輪16、遊動輪17、履帯18、下ローラ21、スライダ23、給脂装置24等により構成されている。
Next, 11 shows a track type (crawler type) lower traveling body as a traveling body. The track-type lower traveling
12は下部走行体11のトラックフレームである。このトラックフレーム12は、図2、図3等に示すように、左,右方向の中央部に位置するセンタフレーム13と、該センタフレーム13の左,右方向両側に設けられ前,後方向に延びた後述のサイドフレーム14とにより構成されている。
ここで、センタフレーム13は、左,右方向に延びる4個の脚部13Aを有したほぼH型の構造体として形成されている(図3中に右半分だけ図示)。また、センタフレーム13の中央には、旋回装置を構成する旋回輪2が取付けられ、該旋回輪2を介して上部旋回体3が搭載される。そして、センタフレーム13の各脚部13Aの先端には後述のサイドフレーム14が取付けられている。
Here, the
14はセンタフレーム13と共にトラックフレーム12を構成する左,右のサイドフレーム(右側のみ図示)を示している。このサイドフレーム14は、図3に示す如く、前,後方向に延びるように配置され、センタフレーム13の各脚部13A先端に取付けられている。
ここで、サイドフレーム14は、例えば短冊状の鋼板を溶接することにより前,後方向に延びる角筒状の製缶構造物として形成されている。即ち、サイドフレーム14は、センタフレーム13側となる左,右方向の内側に位置する垂直な内面板14Aと、該内面板14Aと左,右方向で対面する外側の外面板14Bと、内面板14Aと外面板14Bの上部間を連結した水平な上面板14Cと、内面板14Aと外面板14Bの下端部に固着された水平な下面板14Dとにより構成されている。
Here, the
また、サイドフレーム14の長さ方向の一側と他側には、後述する駆動輪16と遊動輪17が設けられている。さらに、サイドフレーム14の下面板14Dには後述の下ローラ21が取付けられ、上面板14Cには後述のスライダ23が台座22を介して取付けられている。また、図4等に示すように、上面板14Cのうち台座22に対応する部位には、後述する給脂管路28を配設するための配管孔14C1が貫通して形成されている。
Further,
15は後述の駆動輪16を回転駆動する油圧モータとしての走行用油圧モータである。この走行用油圧モータ15は、斜板式等の可変容量形の油圧モータにより構成され、各サイドフレーム14の長さ方向の一側(例えば図2の左側)に取付けられている。そして、走行用油圧モータ15は、後述のメインポンプ31(図7参照)が吐出する圧油により回転駆動され、駆動輪16を介して後述の履帯18を周回駆動するものである。
16は各サイドフレーム14の長さ方向の一側に設けられたドライブタンブラと呼ばれる駆動輪である。この駆動輪16は、走行用油圧モータ15を介してサイドフレーム14に取付けられ、該走行用油圧モータ15を動力として後述の履帯18を周回駆動するものである。ここで、駆動輪16は、円環状に形成され、その内径側には、走行用油圧モータ15の出力軸とスプライン係合するスプライン孔(何れも図示せず)が設けられている。
一方、駆動輪16の外径側には、軸方向に突出して多数個の噛合部16Aが周方向に等間隔で列設されている。これら各噛合部16Aは、後述の履帯18を構成する各トラックシュー19の係合突起19Aに噛合うもので、該各トラックシュー19を連結している間隔寸法に対応して突出間隔が設定されている。
On the other hand, on the outer diameter side of the
17は各サイドフレーム14の長さ方向の他側(例えば図2の右側)に設けられたアイドラと呼ばれる遊動輪である。この遊動輪17は、履帯張り調整機構(図示せず)によって履帯18の張りを調整するもので、サイドフレーム14の長さ方向の他側に向け付勢されている。
18は駆動輪16と遊動輪17とに巻回して設けられた履帯(クローラ)を示している。この履帯18は、図2および図4等に示すように、多数個のトラックシュー19を連結ピン20を用いて連結することにより無限軌道として構成されている。
ここで、トラックシュー19には、図4および図5等に示すように、環状に連結された履帯18の内周側となる面に幅方向に所定の間隔をもって2個の係合突起19Aが突設され、該係合突起19Aは、駆動輪16の各噛合部16Aと噛合って係合するものである。これにより、駆動輪16は、滑りを生じることなく履帯18に対して回転力を確実に伝えることができる。
Here, as shown in FIGS. 4 and 5 and the like, the
また、履帯18を構成する各トラックシュー19の幅方向の両側位置(係合突起19Aの外側位置)はスライダ接触面19Bとなっている。このスライダ接触面19Bは、後述するスライダ23の接触面23Aと接触するものである。
Further, both side positions in the width direction of the
21はサイドフレーム14の下面板14Dに設けられた複数個の下ローラで、該各下ローラ21は、図2に示す如く、前,後方向に所定の間隔をもって配置されている。そして、各下ローラ21は、駆動輪16と遊動輪17との間に位置して履帯18の内側面上で転動しつつ、該履帯18を上側から地面に押付けるように周回方向に案内するものである。
22はサイドフレーム14の上面板14C上に設けられた複数個の台座で、該各台座22は、例えば遊動輪17の近傍、駆動輪16の近傍およびセンタフレーム13の脚部13A間の3箇所に設けられている。また、図4および図5に示すように、サイドフレーム14の長さ方向中間部に設けられた台座22の下端側には、後述する保護カバー30の下カバー部30Aを取付けるためのブラケット22Aが設けられている。
23はサイドフレーム14の上面板14C上に各台座22を介して設けられた複数個のスライダで、該各スライダ23は、図3に示す如く、例えば3個の台座22上に幅方向に離間して2個ずつ合計6個設けられている。また、各スライダ23は、左,右方向(履帯18の幅方向)に離間した状態で台座22上に固定されている。また、各スライダ23の上面は、トラックシュー19のスライダ接触面19Bに摺動可能に接触(摺接)する接触面23Aとなっている。これにより、各スライダ23は、駆動輪16と遊動輪17との間で履帯18を下側から支持して周回方向に案内することができる。
また、各スライダ23には、後述の給脂孔29が上,下方向に貫通して形成され、該給脂孔29の上流端には後述の給脂管路28が接続されている。これら給脂孔29および給脂管路28は、後述の給脂装置24を構成するもので、これら給脂管路28、給脂孔29を通じてグリースを、スライダ23の接触面23Aとトラックシュー19のスライダ接触面19Bとの間に供給できるように構成している。
Each
次に、スライダ23の接触面23Aとトラックシュー19のスライダ接触面19Bとの間にグリースを供給する給脂装置24について説明する。
Next, the greasing
即ち、24はスライダ23と履帯18との摺動部位に潤滑油としてのグリースを供給する給脂装置である。この給脂装置24は、スライダ23の接触面23Aとトラックシュー19のスライダ接触面19Bとの間にグリースを自動で供給するもので、図4、図5および図7等に示すように、後述のグリース貯溜タンク25と、グリースポンプ26と、グリース供給用油圧モータ27と、給脂管路28と、給脂孔29とにより大略構成されている。
That is, 24 is a greasing device that supplies grease as lubricating oil to the sliding portion between the
25はグリースを貯溜する貯油タンクとしてのグリース貯溜タンクである。このグリース貯溜タンク25は、内部にスライダ23と履帯18との摺動部位を潤滑するグリースを貯溜するもので、例えばトラックフレーム12の内部に設けられている。
26はグリース貯溜タンク25内に貯溜されたグリースを吐出する給脂ポンプとしてのグリースポンプである。このグリースポンプ26は、例えばトラックフレーム12内にグリース貯溜タンク25と隣接して設けられている。そして、グリースポンプ26は、後述のグリース供給用油圧モータ27により回転駆動されることにより、グリース貯溜タンク25内のグリースを後述の給脂管路28内に吐出するものである。
27はグリースポンプ26を回転駆動するグリース供給用油圧モータである。このグリース供給用油圧モータ27は、グリースポンプ26と隣り合う位置に、例えばその回転軸がグリースポンプ26の回転軸に連結された状態で設けられている。また、グリース供給用油圧モータ27は、後述する走行用油圧モータ15の容量制御と駐車ブレーキ42のブレーキ制御を行うパイロット管路43に接続されている。これにより、グリース供給用油圧モータ27は、パイロット管路43のパイロット圧を動力として回転駆動され、その回転によりグリースポンプ26を回転駆動する構成となっている。
28はグリースポンプ26と後述の給脂孔29とを接続する給脂管路である。この給脂管路28は、サイドフレーム14内に配設され、その上流端は、グリースポンプ26の吐出口に接続されている。また、給脂管路28の下流端側は、図4および図5等に示すように、サイドフレーム14の配管孔14C1を通じて該サイドフレーム14の上面板14Cから上方に突出し、該上面板14Cから突出した部位は、サイドフレーム14の上面板14Cに設けられた台座22の側面に沿って上,下方向に配設されている。
そして、給脂管路28の下流端は、給脂孔29の上流端に接続され、該給脂孔29にグリースポンプ26から吐出されたグリースを導くように構成している。なお、図7の回路構成図では、1本の給脂管路28が1個の給脂孔29に接続された状態を示しているが、実際には、給脂管路28は、給脂孔29の数に対応して途中で分岐している。そして、図4および図5に示すように、分岐した給脂管路28の各上流端が各給脂孔29にそれぞれ接続されている。
The downstream end of the greasing
29は履帯18とスライダ23との摺接部に対応して該スライダ23に設けられた給脂孔である。この給脂孔29は、例えば図3に示すように、各サイドフレーム14の長さ方向中間部の台座22に支持された2個のスライダ23、即ち、左,右両方のサイドフレーム14で合計4個のスライダ23に、それぞれスライダ23の長さ方向に離間して2個ずつ設けられている。ここで、給脂孔29は、スライダ23の上,下方向に貫通する貫通孔として形成され、下流端がスライダ23の接触面23Aに開口すると共に、上流端が給脂管路28の下流端に接続されている。これにより、給脂管路28を通じて給脂孔29に供給されたグリースは、該給脂孔29からスライダ23の接触面23Aとトラックシュー19のスライダ接触面19Bとの間に流出し、これらスライダ23と履帯18(各トラックシュー19)との摺接部位を潤滑できるようになっている。
次に、給脂装置24の給脂管路28を保護する保護カバーについて説明する。
Next, a protective cover that protects the
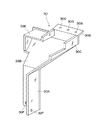
即ち、30は給脂管路28を保護する保護カバーで、該保護カバー30は、図4〜5等に示すように、給脂管路28のうちサイドフレーム14から露出した部位、即ち、サイドフレーム14の配管孔14C1から上方に突出すると共に台座22の側面に沿って上,下方向に配設された部位を覆うものである。このために、保護カバー30は、台座22の四隅に、該四隅をそれぞれ外側から覆う状態で、サイドフレーム14の上面板14Cの上面とスライダ23の下面との間に設けられている。
That is, 30 is a protective cover for protecting the greasing
ここで、保護カバー30は、図6等に示すように、横断面形状がL字状の下カバー部30Aと、該下カバー部30Aの上端縁に接続して設けられ該上端縁から上側に向かう程台座22から離れる方向に傾斜する傾斜部30Bと、該傾斜部30Bの上端縁に接続して設けられ横断面形状がL字状の上カバー部30Cと、該上カバー部30Cの上端縁に設けられスライダ23の下面に沿って傾斜するブラケット部30Dと、上カバー部30Cに設けられ該上カバー部30Cと台座22との間を上側から覆う覆部30Eとにより大略構成されている。
Here, as shown in FIG. 6 and the like, the
下カバー部30Aの下端側には、該下カバー部30Aを台座22に設けられたブラケット22Aにボルト止めするための下側ボルト挿通孔30Fが設けられている。また、ブラケット部30Dには、該ブラケット部30Dをスライダ23の下面にボルト止めするための上側ボルト挿通孔30Gが設けられている。そして、保護カバー30は、下カバー部30Aを下側ボルト30Hを用いて台座22のブラケット22Aに固定すると共に、ブラケット部30Dを上側ボルト30Jを用いてスライダ23の下面に固定することにより、台座22の四隅に給脂管路28を覆った状態でそれぞれ取付けられている。
A lower
次に、走行用油圧モータ15の駆動と給脂装置24によるグリースの供給とを行う油圧回路について、図7を参照しつつ説明する。
Next, a hydraulic circuit for driving the traveling
図中、31は上部旋回体3に搭載された油圧ポンプとしてのメインポンプで、該メインポンプ31は、後述のパイロットポンプ44と共に、エンジン、電動モータ等の原動機(図示せず)によって回転駆動されることにより、作動油タンク32に貯溜された作動油を吐出し、走行用油圧モータ15を含む各種油圧アクチュエータを駆動するものである。
In the figure, 31 is a main pump as a hydraulic pump mounted on the
走行用油圧モータ15は、メインポンプ31、作動油タンク32に主管路33A,33B等を介して接続され、メインポンプ31からの圧油の供給により回転駆動されるものである。ここで、走行用油圧モータ15は、斜板または斜軸等の容量可変部15Aを有する可変容量形の油圧モータにより構成され、例えばそのモータ容量が容量可変部15Aの傾転角に応じて可変に制御されるものである。
The traveling
そして、走行用油圧モータ15は、メインポンプ31からの圧油により、モータ容量が大容量のときは、高トルクで低速回転され、この場合には、例えば油圧ショベル1に十分な登坂力を与えることができ、油圧ショベル1の走行速度は相対的に遅い速度に設定される。一方、モータ容量が小容量のときは、メインポンプ31からの圧油により走行用油圧モータ15は低トルクで高速回転され、油圧ショベル1の走行速度を速くする。
The traveling
34は走行用油圧モータ15の容量を可変に制御する容量制御回路である。この容量制御回路34は、後述の傾転制御シリンダ35と、容量制御弁36とにより大略構成されている。
35は走行用油圧モータ15の容量可変部15Aを傾転駆動する傾転制御シリンダである。この傾転制御シリンダ35は、後述の容量制御弁36を介して主管路33Aまたは33Bからの圧油が給排されることにより、走行用油圧モータ15の容量可変部15Aを図7中の矢示A,B方向に傾転駆動するものである。
36は傾転制御シリンダ35への圧油の給排を制御する容量制御弁である。この容量制御弁36は、後述するパイロット管路43のパイロット圧(指令圧)Pに応じて大容量位置(A)と小容量位置(B)とに切換制御される。そして、容量制御弁36は、大容量位置(A)にある間は、走行用油圧モータ15の容量可変部15Aを傾転制御シリンダ35で矢示A方向に傾転駆動させ、これにより走行用油圧モータ15のモータ容量を大容量(低速)に設定する。一方、容量制御弁36は、小容量位置(B)に切換えられた場合には、容量可変部15Aを傾転制御シリンダ35で矢示B方向に傾転駆動させ、これにより走行用油圧モータ15の容量を小容量(高速)に設定する。
37は主管路33A,33Bの途中に設けられた走行用の方向制御弁である。この方向制御弁37は、例えば油圧ショベル1のオペレータが操作する走行レバー37Aによって中立位置(イ)から切換位置(ロ),(ハ)に切換操作され、この切換位置(ロ),(ハ)で、走行用油圧モータ15の回転方向を、図7の矢示F,R方向に切換える。また、方向制御弁37は、中立位置(イ)に復帰すると、メインポンプ31から走行用油圧モータ15に向けて圧油が給排されるのを遮断し、走行用油圧モータ15を停止させるものである。
38は走行用油圧モータ15と方向制御弁37との間に位置して主管路33A,33Bの途中に設けられたブレーキ回路で、該ブレーキ回路38は、後述のカウンタバランス弁39、リリーフ弁40,41等から構成されている。そして、ブレーキ回路38は、方向制御弁37が中立位置(イ)に戻した時に、走行用油圧モータ15が慣性回転すると、リリーフ弁40,41のうち何れかが開弁して主管路33A,33Bのうち高圧側の圧油を低圧側にリリーフし、走行用油圧モータ15に制動力を与えるものである。
A
39は走行用油圧モータ15と方向制御弁37との間に位置して主管路33A,33Bの途中に設けられたカウンタバランス弁で、該カウンタバランス弁39は、左,右両側に戻しばね39A,39Bが設けられ、方向制御弁37の切換操作時に、これに連動するように中立位置(イ)から切換位置(ロ),(ハ)へと戻しばね39A,39Bに抗して切換る構成となっている。
A
即ち、方向制御弁37が中立位置(イ)から切換位置(ロ),(ハ)に切換えられたときに、カウンタバランス弁39はメインポンプ31からの圧油がパイロット管路39C,39Dに導かれることにより、中立位置(イ)から左,右の切換位置(ロ),(ハ)に戻しばね39A,39Bに抗して切換えられるものである。そして、カウンタバランス弁39は、切換位置(ロ),(ハ)に切換ったときに、メインポンプ31からの圧油が走行用油圧モータ15に向けて給給されるのを許すと共に、メインポンプ31からの戻り油を作動油タンク32に側に排出させる。
That is, when the
また、方向制御弁37が中立位置(イ)に戻された時には、これに連動してカウンタバランス弁39も、戻しばね39A,39Bにより中立位置(イ)に戻される。そして、カウンタバランス弁39は、中立位置(イ)において、慣性回転中の走行用油圧モータ15から排出される戻り油が、作動油タンク32側に流出するのを遮断することにより、走行用油圧モータ15との間で主管路33Aまたは33B内にブレーキ圧を発生させ、このブレーキ圧によって走行用油圧モータ15に制動力を与えるものである。
When the
さらに、車両が坂道等を降坂するときには、降坂方向の慣性力が車両に作用することにより走行用油圧モータ15が慣性回転され、該走行用油圧モータ15がポンプ作用を行うことがある。そして、この場合にも、カウンタバランス弁39は中立位置(イ)に復帰し、走行用油圧モータ15との間で主管路33Aまたは33B内にブレーキ圧を発生させることにより、車両の逸走を防止するものである。
Further, when the vehicle descends on a slope or the like, the traveling
40,41は走行用油圧モータ15とカウンタバランス弁39との間に位置して主管路33A,33B間に設けられた一対のリリーフ弁で、該リリーフ弁40,41は、走行用油圧モータ15の慣性回転時等に主管路33Aまたは33B内に発生したブレーキ圧がリリーフ設定圧よりも高い過剰圧になると開弁してこの過剰圧を相手方となる主管路33Bまたは33A側にリリーフさせる。そして、この間に、リリーフ弁40,41は、走行用油圧モータ15の慣性エネルギを吸収し、走行用油圧モータ15を徐々に停止させると共に、走行用油圧モータ15に過負荷が作用するのを防止するものである。
ここで、リリーフ弁40,41は、アキュムレータ付きのリリーフ弁として構成され、主管路33Aまたは33Bの圧力に対して段階的なリリーフ特性を有するものとしている。即ち、主管路33Aまたは33Bの圧力が高まるときに、リリーフ弁40または41の蓄油室40Aまたは41A内に絞り40B,41Bを介して圧油が供給されることにより、この蓄油室40Aまたは41A内に圧油が供給される間、リリーフ弁40または41の開弁圧を低圧にして、ブレーキ圧が急激に高まることによる急制動を防止できるようしている。
Here, the
42は走行用油圧モータ15の停止時に駆動輪16(走行用油圧モータ15)に制動力を付与するネガティブ型の駐車ブレーキである。この駐車ブレーキ42は、後述のパイロット管路43(43A)に接続され、該パイロット管路43(43A)のパイロット圧が所定のブレーキ解除圧を上回ると、ブレーキを解除して駆動輪16(走行用油圧モータ15)の回転を許すものである。
Reference numeral 42 denotes a negative parking brake that applies a braking force to the drive wheels 16 (travel hydraulic motor 15) when the travel
43は容量制御回路34の容量制御と駐車ブレーキ42のブレーキ制御を行うパイロット管路で、該パイロット管路43は、一端側が後述の電磁切換弁45を介してパイロットポンプ44と作動油タンク32とに選択的に接続されるものである。また、パイロット管路43の他端側は、ブレーキ側分岐管43Aと容量制御側分岐管43Bとに途中で分岐され、ブレーキ側分岐管43Aが駐車ブレーキ42に、容量制御側分岐管43Bが容量制御弁36のパイロット室に、それぞれ接続されている。
44は上部旋回体3に搭載されたパイロットポンプで、該パイロットポンプ44は、メインポンプ31と共に、エンジン、電動モータ等の原動機によって回転駆動されることにより、作動油タンク32に貯溜された作動油を吐出するものである。そして、パイロットポンプ44は、パイロット管路43(43A,43B)を介して容量制御弁36、駐車ブレーキ42、給脂装置24のグリース供給用油圧モータ27に接続されている。
Reference numeral 44 denotes a pilot pump mounted on the
45はパイロット管路43の途中に設けられた電磁切換弁で、該電磁切換弁45は、例えば比例式電磁切換弁として構成され、その流入側にパイロットポンプ44、作動油タンク32が選択的に接続され、その流出側は、パイロット管路43(43A,43B)を介して容量制御弁36、駐車ブレーキ42、グリース供給用油圧モータ27に接続されている。そして、電磁切換弁45は、例えばコントロールユニット46からの制御信号に基づいて、パイロットポンプ44の吐出圧とタンク圧(0)との間で所定のパイロット圧(指令圧)Pを発生させるものである。
45 is an electromagnetic switching valve provided in the middle of the
より具体的には、電磁切換弁45は、例えば、オペレータが切換操作する走行レバー37A(方向制御弁37)の位置と速度切換スイッチ47の位置とに対応して、所定のパイロット圧Pを発生させる(所定のパイロット圧Pに調節する)。この為に、例えば、コントロールユニット46の入力側には、走行レバー37Aが停止位置と走行位置との何れかであるかを検出する走行レバー用センサ48と、オペレータが切換操作することにより油圧ショベル1の走行速度を低速と高速との何れかに切換えるための速度切換スイッチ47とが接続されている。一方、コントロールユニット46の出力側は、電磁切換弁45と接続されている。
More specifically, the
そして、例えば走行レバー37Aが停止位置、即ち、方向制御弁37の位置が中立位置(イ)の場合は、電磁切換弁45は、パイロット圧Pを、駐車ブレーキ42の解除圧、容量制御弁36の切換圧、グリース供給用油圧モータ27の駆動開始圧の何れも下回る圧力、例えば0(タンク圧)にする。これにより、駐車ブレーキ42は作動し、グリース供給用油圧モータ27は駆動されず、容量制御弁36は大容量位置(A)となる。
For example, when the traveling
一方、走行レバー37Aが中立位置から走行位置(例えば前進位置または後退位置)に操作された場合、即ち、方向制御弁37が切換位置(ロ),(ハ)に切換操作された場合は、電磁切換弁45は、パイロット圧Pを、少なくとも駐車ブレーキ42の解除圧とグリース供給用油圧モータ27の駆動圧との両方を上回る圧力にする。このとき、速度切換スイッチ47が低速位置であれば、電磁切換弁45は、パイロット圧Pを、駐車ブレーキ42の解除圧とグリース供給用油圧モータ27の駆動開始圧との両方を上回るが、容量制御弁36の切換圧は下回る圧力(例えば低圧)にする。
On the other hand, when the
これにより、駐車ブレーキ42は解除され、グリース供給用油圧モータ27は駆動され、容量制御弁36は大容量位置(A)となる。このとき、グリース供給用油圧モータ27によりグリースポンプ26が回転駆動され、グリース貯溜タンク25に貯溜されたグリースは、給脂管路28、給脂孔29を通じてスライダ23の接触面23Aとトラックシュー19のスライダ接触面19Bとの間に供給される。これにより、スライダ23と履帯18(各トラックシュー19)との摺接部位が潤滑され、当該摺接部位の摩擦抵抗、摩耗を低減することができる。
As a result, the parking brake 42 is released, the grease supply
また、速度切換スイッチ47が高速位置に操作された場合は、電磁切換弁45は、パイロット圧Pを、駐車ブレーキ42の解除圧、グリース供給用油圧モータ27の駆動開始圧、容量制御弁36の切換圧の何れも上回る圧力(例えば高圧)にする。これにより、駐車ブレーキ42は解除され、グリース供給用油圧モータ27は駆動し、容量制御弁36は小容量位置(B)となる。このときも、グリース供給用油圧モータ27によりグリースポンプ26が回転駆動され、スライダ23と履帯18との摺接部位にグリースが供給されるから、当該摺接部位の摩擦抵抗、摩耗を低減することができる。
When the
なお、図中、一点鎖線で示す49は、上部旋回体3の旋回動作に拘わらず上部旋回体3と下部走行体11との間で作動油の流通を可能にするためのセンタジョイントである。また、50は、作動油タンク32に作動油を戻すための戻り管路(ドレン管路)である。
In the figure, 49 indicated by a one-dot chain line is a center joint for allowing the hydraulic oil to flow between the
本実施の形態による油圧ショベル1は上述の如き構成を有するもので、次に、油圧ショベル1の下部走行体11で走行するときの動作について説明する。
The
まず、オペレータが走行レバー37Aを操作することにより方向制御弁37を中立位置(イ)から切換位置(ロ)に切換操作すると、これに連動してカウンタバランス弁39が中立位置(イ)から切換位置(ロ)に切換る。そして、走行用油圧モータ15にはメインポンプ31からの圧油が主管路33Aを介して供給され、戻り油が主管路33Bを介して作動油タンク32へと排出される。これにより走行用油圧モータ15が矢示F方向に回転駆動され、下部走行体11が前進する。また、方向制御弁37を中立位置(イ)から切換位置(ハ)に切換えた時には、カウンタバランス弁39が切換位置(ハ)に切換えられ、走行用油圧モータ15が矢示R方向に回転駆動され、下部走行体11が後進する。
First, when the operator operates the
この場合に、オペレータにより操作される速度切換スイッチ47が低速位置にあれば、パイロット管路43のパイロット圧Pは電磁切換弁45により低圧(駐車ブレーキ42の解除圧およびグリース供給用油圧モータ27の駆動開始圧を上回るが容量制御弁36の切換圧は下回る圧力)に調節され、容量制御回路34の容量制御弁36が大容量位置(A)に保持される。このため、走行用油圧モータ15の容量可変部15Aが傾転制御シリンダ35により矢示A方向に傾転駆動され、モータ容量が大容量に設定される。これにより、走行用油圧モータ15はメインポンプ31からのモータ駆動圧により高トルクで低速回転され、油圧ショベル1は十分なトルクをもって低速で走行駆動される。
In this case, if the
一方、速度切換スイッチ47が低速位置から高速位置に操作された場合は、パイロット管路43のパイロット圧Pは電磁切換弁45により高圧(駐車ブレーキ42の解除圧、グリース供給用油圧モータ27の駆動開始圧、容量制御弁36の切換圧を上回る圧力)に調節され、容量制御弁36が小容量位置(B)に切換る。このため、走行用油圧モータ15の容量可変部15Aが傾転制御シリンダ35により矢示B方向に傾転駆動され、モータ容量が小容量に設定される。これにより、走行用油圧モータ15はメインポンプ31からのモータ駆動圧により低トルクで高速回転され、油圧ショベル1を高速で走行駆動することができる。
On the other hand, when the
何れにしても、油圧ショベル1の走行時は、走行用油圧モータ15により回転駆動される駆動輪16の噛合部16Aが各トラックシュー19の係合突起19Aに噛合うことにより、駆動輪16により履帯18を遊動輪17との間で周回動作させることができ、履帯18の周回動作によって下部走行体11を走行させることができる。また、履帯18を周回動作させているときには、各下ローラ21、各スライダ23が履帯18を周回方向に案内するが、このとき、履帯18を構成する各トラックシュー19のスライダ接触面19Bは、各スライダ23の接触面23Aと接触する(摺接)する。
In any case, when the
この場合、本実施の形態によれば、スライダ23と履帯18との摺接部位にグリースを自動で供給する給脂装置24を設ける構成としているので、該給脂装置24によりスライダ23と履帯18との摺接部位を潤滑することができる。
In this case, according to the present embodiment, since the
即ち、図8に示すように、オペレータが走行レバー37Aを中立位置から前進位置または後進位置に操作することにより、方向制御弁37が中立位置(イ)から切換位置(ロ)または(ハ)に切換えられると、パイロット管路43のパイロット圧Pは、電磁切換弁45により、駐車ブレーキ42の解除圧およびグリース供給用油圧モータ27の駆動開始圧よりも高い圧力(低圧または高圧)に調節される。
That is, as shown in FIG. 8, when the operator operates the traveling
これにより、駐車ブレーキ42が解除されると共に、グリース供給用油圧モータ27が駆動され、グリース貯溜タンク25に貯溜されたグリースが、給脂管路28、給脂孔29を通じてスライダ23の接触面23Aとトラックシュー19のスライダ接触面19Bとの間に供給される。そして、このように供給されるグリースにより、スライダ23と履帯18との摺接部位が潤滑され、当該摺接部位の摩擦抵抗、摩耗を低減することができる。この結果、スライダ23と履帯18の寿命(交換時期)を延ばすことができ、下部走行体11の耐久性、信頼性を高めることができる。
As a result, the parking brake 42 is released and the grease supply
また、本実施の形態によれば、サイドフレーム14の上面板14Cとスライダ23の下面との間に、給脂装置24の給脂管路28を覆う保護カバー30を設ける構成としているので、給脂管路28に土砂が直接堆積することを保護カバー30により防止することができ、給脂装置24の耐久性、信頼性を高めることができる。
Further, according to the present embodiment, the
更に、本実施の形態によれば、給脂装置24を構成するグリースポンプ26は、パイロット管路43のパイロット圧Pを動力として駆動されるグリース供給用油圧モータ27により駆動される構成としている。ここで、パイロット管路43のパイロット圧Pは、走行用油圧モータ15の容量を制御する容量制御回路34の容量制御と駐車ブレーキ42のブレーキ制御とを行うものであるので、下部走行体11の走行に合せて(下部走行体11の走行に伴って)、グリース供給用油圧モータ27によりグリースポンプ26を駆動することができる。これにより、スライダ23と履帯18との摺接部位を、下部走行体11の走行に応じて好適に潤滑することができ、この面からも、下部走行体11の耐久性、信頼性の向上を図ることができる。
Further, according to the present embodiment, the
なお、上述した実施の形態では、サイドフレーム14の長さ方向中間部の台座22に支持されたスライダ23に給脂孔29を設けた場合を例に挙げて説明した。しかし、本発明はこれに限らず、例えば、サイドフレームに台座を介して支持された全てのスライダに給脂孔を設ける構成としてもよい。
In the embodiment described above, the case where the greasing
また、上述した実施の形態では、パイロット管路43は、走行用油圧モータ15の容量制御と駐車ブレーキ42のブレーキ制御との両方を同じパイロット管路43を用いて行う場合を例に挙げて説明した。しかし、本発明はこれに限らず、例えば、走行用油圧モータの容量制御と駐車ブレーキのブレーキ制御とをそれぞれ別のパイロット管路を用いて行う構成としてもよい。この場合、給脂装置の給脂ポンプは、例えば駐車ブレーキのブレーキ制御を行うパイロット管路のパイロット圧を動力として駆動させることができる。
Further, in the above-described embodiment, the
更に、上述した実施の形態では、装軌式車両の走行体として油圧ショベル1の下部走行体11を例示している。しかし、本発明はこれに限るものではなく、例えば油圧クレーン、ブルドーザ等の他の装軌式車両の走行体にも広く適用することができる。
Furthermore, in embodiment mentioned above, the lower traveling
1 油圧ショベル(装軌式車両)
11 下部走行体(走行体)
12 トラックフレーム
13 センタフレーム
14 サイドフレーム
15 走行用油圧モータ(油圧モータ)
16 駆動輪
17 遊動輪
18 履帯
23 スライダ
24 給脂装置
25 グリース貯溜タンク(貯油タンク)
26 グリースポンプ(給脂ポンプ)
28 給脂管路
29 給脂孔
30 保護カバー
31 メインポンプ(油圧ポンプ)
33A,33B 主管路
34 容量制御回路
37 方向制御弁
42 駐車ブレーキ
43 パイロット管路
1 Hydraulic excavator (tracked vehicle)
11 Lower traveling body (traveling body)
12
16
26 Grease pump (Grease pump)
28
33A,
Claims (3)
前記スライダと前記履帯との摺接部位に潤滑油を自動で供給する給脂装置を設ける構成としたことを特徴とする装軌式車両の走行体。 A track frame having a center frame and side frames extending in the front and rear directions on both the left and right sides of the center frame; and a drive wheel provided on one side in the length direction of each side frame of the track frame; An idler wheel provided on the other side in the length direction of each side frame, a crawler belt wound around the drive wheel and the idler wheel, and the drive wheel and idler wheel provided in each side frame; In a tracked vehicle traveling body comprising a slider for guiding the crawler belt between,
A tracked vehicle traveling body characterized in that a lubrication device for automatically supplying lubricating oil to a sliding contact portion between the slider and the crawler belt is provided.
前記給脂装置は、前記潤滑油を貯溜する貯油タンクと、該貯油タンク内に貯溜された潤滑油を吐出する給脂ポンプとを有し、該給脂ポンプは、前記パイロット管路のパイロット圧を動力として前記潤滑油を吐出する構成としてなる請求項1または2に記載の装軌式車両の走行体。 A hydraulic pump, a variable displacement hydraulic motor connected to the hydraulic pump via a main line and rotationally driving the drive wheel, a capacity control circuit for variably controlling the capacity of the hydraulic motor, and a middle of the main line A direction control valve provided in the vehicle, a parking brake that applies a braking force to the drive wheel when the hydraulic motor is stopped, and a pilot pipe that performs capacity control of the capacity control circuit and / or brake control of the parking brake. Prepared,
The greasing device includes an oil storage tank that stores the lubricating oil, and a greasing pump that discharges the lubricating oil stored in the oil storage tank, and the greasing pump includes a pilot pressure of the pilot line. The traveling body of the tracked vehicle according to claim 1, wherein the lubricating oil is discharged using the power as a power source.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011003835A JP2012144141A (en) | 2011-01-12 | 2011-01-12 | Traveling body of tracklaying vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011003835A JP2012144141A (en) | 2011-01-12 | 2011-01-12 | Traveling body of tracklaying vehicle |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012144141A true JP2012144141A (en) | 2012-08-02 |
Family
ID=46788189
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011003835A Pending JP2012144141A (en) | 2011-01-12 | 2011-01-12 | Traveling body of tracklaying vehicle |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012144141A (en) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014182216A1 (en) * | 2013-05-08 | 2014-11-13 | BAE Systems Hägglunds Aktiebolag | Drive unit for tracked vehicle and vehicle provided with drive unit |
| JP2016148446A (en) * | 2015-02-06 | 2016-08-18 | 株式会社クボタ | Working machine hydraulic system and working machine |
| US10316493B2 (en) | 2015-02-06 | 2019-06-11 | Kubota Corporation | Hydraulic system and working machine including the same |
| US10543876B2 (en) | 2016-12-15 | 2020-01-28 | Caterpillar Inc. | Track support rail for supporting track assembly of machine, track support assembly, and method of using same |
| US10562574B2 (en) | 2016-09-08 | 2020-02-18 | Caterpillar Inc. | Slider for track assembly of machine |
-
2011
- 2011-01-12 JP JP2011003835A patent/JP2012144141A/en active Pending
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014182216A1 (en) * | 2013-05-08 | 2014-11-13 | BAE Systems Hägglunds Aktiebolag | Drive unit for tracked vehicle and vehicle provided with drive unit |
| EP2994371A4 (en) * | 2013-05-08 | 2017-01-04 | Bae Systems Hägglunds Aktiebolag | Drive unit for tracked vehicle and vehicle provided with drive unit |
| US9878748B2 (en) | 2013-05-08 | 2018-01-30 | BAE Systems Hägglunds Aktiebolag | Drive unit for tracked vehicle and vehicle provided with drive unit |
| JP2016148446A (en) * | 2015-02-06 | 2016-08-18 | 株式会社クボタ | Working machine hydraulic system and working machine |
| US10316493B2 (en) | 2015-02-06 | 2019-06-11 | Kubota Corporation | Hydraulic system and working machine including the same |
| US10562574B2 (en) | 2016-09-08 | 2020-02-18 | Caterpillar Inc. | Slider for track assembly of machine |
| US10543876B2 (en) | 2016-12-15 | 2020-01-28 | Caterpillar Inc. | Track support rail for supporting track assembly of machine, track support assembly, and method of using same |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5669692B2 (en) | Working machine | |
| JP2012144141A (en) | Traveling body of tracklaying vehicle | |
| JP5513395B2 (en) | Combiner valve control system and method | |
| CA2871244C (en) | Guide rail for crawler track | |
| JP5687970B2 (en) | Working machine | |
| JP6927686B2 (en) | Flood control system with automatic ride control | |
| JP2004205019A (en) | Backhoe hydraulic circuit structure | |
| JP2010270527A (en) | Working machine | |
| JP2006336844A (en) | Working machine | |
| CN102758805A (en) | Hydraulic circuit and working machine including the same | |
| US20220034067A1 (en) | Hydraulic Driving Apparatus | |
| JP2006336846A (en) | Fluid pressure circuit | |
| JP2005035532A (en) | Track tension adjuster | |
| JP4480565B2 (en) | Backhoe hydraulic circuit structure | |
| JP2012162878A (en) | Hydraulic drive unit of construction machine | |
| WO2012039600A1 (en) | Drive means for amphibious equipment | |
| JP2010223256A (en) | Working machine | |
| JP5687971B2 (en) | Working machine | |
| JP4746638B2 (en) | Crawler type traveling device | |
| JP6618495B2 (en) | Hydraulic drive | |
| JP4970357B2 (en) | Hydraulic drive motor device | |
| JP5286156B2 (en) | Working machine | |
| JP2017145950A (en) | Hydraulic drive device of hydraulic motor and construction vehicle | |
| JP4502890B2 (en) | Backhoe hydraulic circuit structure | |
| JP2000304129A (en) | Working vehicle |