JP2012144138A - Engine control device of series hybrid vehicle - Google Patents
Engine control device of series hybrid vehicle Download PDFInfo
- Publication number
- JP2012144138A JP2012144138A JP2011003707A JP2011003707A JP2012144138A JP 2012144138 A JP2012144138 A JP 2012144138A JP 2011003707 A JP2011003707 A JP 2011003707A JP 2011003707 A JP2011003707 A JP 2011003707A JP 2012144138 A JP2012144138 A JP 2012144138A
- Authority
- JP
- Japan
- Prior art keywords
- engine
- operation amount
- accelerator operation
- speed
- vehicle speed
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images









Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/10—Internal combustion engine [ICE] based vehicles
- Y02T10/40—Engine management systems
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/62—Hybrid vehicles
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
Landscapes
- Hybrid Electric Vehicles (AREA)
- Control Of Vehicle Engines Or Engines For Specific Uses (AREA)
- Electric Propulsion And Braking For Vehicles (AREA)
Abstract
【課題】エンジンと発電機とバッテリと駆動モータとを備えたシリーズハイブリッド車両のエンジン制御装置において、燃費効率を向上するとともに、ドライバビリティも向上することにある。
【解決手段】エンジン制御装置(11)には、車速を検出する車速検出手段(13)を設け、アクセル操作量を検出するアクセル操作量検出手段(14)を設け、車速検出手段(13)により検出された車速とアクセル操作量検出手段(14)により検出されたアクセル操作量とに基づいてエンジン回転数を制御する制御手段(12)を設けている。
【選択図】図1
In an engine control apparatus for a series hybrid vehicle including an engine, a generator, a battery, and a drive motor, fuel efficiency is improved and drivability is also improved.
An engine control device (11) is provided with a vehicle speed detecting means (13) for detecting a vehicle speed, an accelerator operation amount detecting means (14) for detecting an accelerator operation amount, and the vehicle speed detecting means (13). Control means (12) is provided for controlling the engine speed based on the detected vehicle speed and the accelerator operation amount detected by the accelerator operation amount detection means (14).
[Selection] Figure 1
Description
この発明は、シリーズハイブリッド車両のエンジン制御装置に係り、特に駆動モータで車輪を駆動し、エンジンを発電のみに用いるシリーズハイブリッド車両のエンジン制御装置に関する。 The present invention relates to an engine control device for a series hybrid vehicle, and more particularly to an engine control device for a series hybrid vehicle in which wheels are driven by a drive motor and the engine is used only for power generation.
図9に示すように、車両としてのシリーズハイブリッド車両101は、エンジン102と、このエンジン102により駆動される発電機103と、この発電機103により充電されるバッテリ104と、発電機103の発電電力又はバッテリ104の放電電力により車輪を駆動する駆動モータ105とを備えている。エンジン102と発電機103とは、第1電力線N1で電気的に連絡している。発電機103とバッテリ104とは、第2電力線N2で電気的に連絡している。駆動モータ105は、第3電力線N3の一端に接続し、この第3電力線N3の他端が第2電力線N2に接続することで、発電機103とバッテリ104とに電気的に連絡している。
このようなシリーズハイブリッド車両においては、典型的な通常のガソリン車のように、アクセルペダルの踏み込み状態に応じてエンジンの始動・エンジン回転数の制御を必ずしもする必要はなく、エンジンが発電のみに使用されて車輪の直接の駆動力には使用されず、車輪の駆動を駆動モータのみで行っている。
また、シリーズハイブリッド車両においては、燃費効率の良い動作(制御)だけを考えることが可能であり、燃費だけを考えた場合の制御は、エンジンの最も良い効率のエンジン回転数とトルクとで始動させることが有効になる(定点運転でなるべく始動回数を減らすこと)。逆に、ガソリン車のようにアクセル操作に連動させてエンジン回転数を制御し、さらに、アイドルストップを行い、頻繁にエンジンの始動・停止を行うことは、燃費を考えた上で不利になるものである。
As shown in FIG. 9, a
In such a series hybrid vehicle, it is not always necessary to start the engine and control the engine speed according to the depressed state of the accelerator pedal as in a typical ordinary gasoline vehicle, and the engine is used only for power generation. Therefore, it is not used for the direct driving force of the wheel, and the wheel is driven only by the driving motor.
In series hybrid vehicles, it is possible to consider only the operation (control) with good fuel efficiency, and the control when considering only the fuel efficiency is started at the engine speed and torque with the best efficiency of the engine. Is effective (reducing the number of startings as much as possible by fixed point operation). On the other hand, controlling the engine speed in conjunction with the accelerator operation, as in a gasoline vehicle, and performing idle stop and frequently starting and stopping the engine are disadvantageous in terms of fuel efficiency. It is.
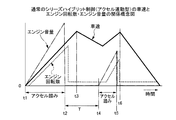
図10に示すように、通常のガソリン車においては、エンジンのアイドル運転で、エンジンが所定のエンジン回転数を維持し、エンジン音は、低い回転数でのアイドリング時のエンジン音量となる(アイドルストップ車両の場合には、停止する)。
アイドル運転状態からアクセルペダルを踏み込み、このアクセルペダルを踏み込んだアクセル操作量によってアクセル開度が決まり、エンジンのトルクとエンジン回転数が出力される。アクセルペダルを踏み込むと、エンジンには燃料が噴射され、エンジンの爆発音によるエンジン音が発生する。このエンジン音は、エンジン回転数が高い程、大きくなるものである。
そして、アクセルペダルを戻すと、エンジンへの燃料の噴射が停止されるが、車速があれば、エンジンは駆動し続け、エンジンブレーキ状態で、エンジン音量は小さくなる。
具体的に説明すると、図10における車速とエンジン回転数とエンジン音量との関係においては、通常のガソリン車に搭載されたエンジンのアイドル運転時において(時間t0)、加速時で、アクセルペダルが踏み込まれてアクセル操作量が増加すると(時間t1)、車速とエンジン回転数とエンジン音量とが共に増加し、その後、アクセルペダルが戻されてアクセル操作量が零(0)になると(時間t2)、エンジン音量は、燃料噴射の有無で変わるため、エンジン回転数とは異なり、エンジン回転数と比較してかなり低くなる。
アクセル操作量が零(0)になった時(時間t2)から時間Tが経過して、再度の加速時で、アクセルペダルが踏み込まれてアクセル操作量が増加すると(時間t3)、車速とエンジン回転数とエンジン音量とが共に増加し、そして、アクセルペダルが戻されて零(0)になると(時間t4)、エンジンへの燃料噴射が停止し、エンジン音量が急激に低下するが、車速とエンジン回転数とは比例して徐々に低下する。
また、図11における車速とエンジン回転数とエンジン音量との関係の概念においては、加速時で、アクセルペダルが踏み込まれてアクセル操作量が増加すると(時間t1)、車速とエンジン回転数とエンジン音量とが共に増加し、その後、アクセルペダルが戻されてアクセル操作量が零(0)になると(時間t2)、車速とエンジン回転数とがそのまま増加するが、エンジン音量は、燃料の噴射の有無で変わるため、エンジン回転数とは異なり、エンジン回転数と比較してかなり低くなる。そして、車速とエンジン回転数とは、所定の値となった後で(時間t3)、低下する。
アクセル操作量が零(0)になった時(時間t2)から一定時間Tが経過し、再度の加速時で、アクセルペダルが踏み込まれてアクセル操作量が増加すると(時間t4)、車速とエンジン回転数とエンジン音量とが共に増加し、そして、アクセルペダルが戻されて零(0)になると(時間t5)、エンジンが停止し、エンジン音量が一旦急激に低下した後で徐々に低下するが、車速とエンジン回転数とは、そのまま増加し、その後、所定の値になり(時間t6)、その後、比例して低下する。
As shown in FIG. 10, in a normal gasoline vehicle, the engine maintains a predetermined engine speed during idling of the engine, and the engine sound becomes the engine volume when idling at a low speed (idle stop). In the case of a vehicle, stop.)
The accelerator pedal is depressed from the idling state, and the accelerator opening is determined by the accelerator operation amount when the accelerator pedal is depressed, and the engine torque and the engine speed are output. When the accelerator pedal is depressed, fuel is injected into the engine, and engine noise is generated due to the explosion of the engine. This engine sound increases as the engine speed increases.
When the accelerator pedal is returned, the fuel injection to the engine is stopped. However, if the vehicle speed is high, the engine continues to drive, and the engine volume decreases in the engine brake state.
More specifically, in the relationship among the vehicle speed, the engine speed, and the engine volume in FIG. 10, the accelerator pedal is depressed at the time of acceleration during idling of the engine mounted on a normal gasoline vehicle (time t0). When the accelerator operation amount increases (time t1), the vehicle speed, the engine speed, and the engine volume all increase. Thereafter, when the accelerator pedal is returned to zero (0) (time t2), Since the engine volume changes depending on the presence or absence of fuel injection, it differs from the engine speed and is considerably lower than the engine speed.
When the accelerator operation amount becomes zero (0) (time t2) and time T elapses, and the accelerator pedal is depressed and the accelerator operation amount increases (time t3) during acceleration, the vehicle speed and the engine When both the engine speed and the engine volume increase and the accelerator pedal is returned to zero (0) (time t4), the fuel injection to the engine stops and the engine volume decreases rapidly. It gradually decreases in proportion to the engine speed.
Further, in the concept of the relationship between the vehicle speed, the engine speed, and the engine volume in FIG. 11, when the accelerator pedal is depressed and the accelerator operation amount increases during acceleration (time t1), the vehicle speed, the engine speed, and the engine volume. When the accelerator pedal is returned and the accelerator operation amount becomes zero (0) (time t2), the vehicle speed and the engine speed increase as they are, but the engine volume is determined by whether fuel is injected or not. Therefore, unlike the engine speed, it is considerably lower than the engine speed. Then, the vehicle speed and the engine speed decrease after reaching predetermined values (time t3).
When the accelerator operation amount becomes zero (0) (time t2) and a certain time T elapses and the acceleration pedal is depressed and the accelerator operation amount increases (time t4) at the time of acceleration again, the vehicle speed and the engine When both the engine speed and the engine volume increase and the accelerator pedal is returned to zero (0) (time t5), the engine is stopped, and the engine volume decreases once and then gradually decreases. The vehicle speed and the engine speed increase as they are, and thereafter reach a predetermined value (time t6), and then decrease in proportion.
次いで、図12に示すように、通常のシリーズハイブリッド車の制御においては、バッテリ蓄電量(SOC)が高い場合は、エンジンによる発電をしないでバッテリの電力のみで駆動モータを回転させて走行する。
この通常のシリーズハイブリッド車の制御においては、アクセルペダルを踏んでいない状態の場合に、エンジンを停止状態にする。バッテリ蓄電量(SOC)がある一定水準まで低くなった場合に、アクセルペダルを踏み込み、駆動力を必要とした場合は、エンジンを始勤して発電を行う。アクセルペダルを踏み込むと、アクセル連動型であることから、アクセルペダルを踏んだ分のアクセル操作量だけ、エンジン回転数が上がる。
アクセルペダルを戻してアクセル操作量を零(0)とし、エンジンを停止させる。車速が所定にある中で、再度、アクセルペダルを踏み込むと、再びエンジンが始動し、アクセルペダルを踏んだ分のアクセル操作量だけ、エンジンを駆動させる。バッテリ蓄電量(SOC)があまりに低くなった場合には、停車中でもエンジンによる発電を維持する。
具体的に説明すると、図12における通常のシリーズハイブリッド車の制御の車速とエンジン回転数とエンジン音量との関係においては、加速時で、アクセルペダルが踏み込まれてアクセル操作量が増加すると(時間t1)、先ず、車速が増加し始め、その後、エンジンを始動させ(時間t2)、エンジン回転数とエンジン音量とが共に増加し、そして、アクセルペダルが戻されてアクセル操作量が零(0)になると(時間t3)、エンジンが停止して燃料の節約を図り、このとき、エンジン回転数とエンジン音量とが急激に低下して略零(0)となる。
アクセル操作量が零(0)になった時(時間t3)から時間Tが経過して、再度の加速時で、アクセルペダルが踏み込まれてアクセル操作量が増加するとエンジンを再始動させ(時間t4)、車速とエンジン回転数とエンジン音量とが比例して増加し、その後、アクセルペダルが戻されて零(0)になると(時間t5)、エンジンが停止し、エンジン回転数とエンジン音量とが急激に低下するが、車速は徐々に低下する。
また、図13における通常のシリーズハイブリッド車の制御の車速とエンジン回転数とエンジン音量との関係の概念においては、加速時で、アクセルペダルが踏み込まれてアクセル操作量が増加すると(時間t1)、車速とエンジン回転数とエンジン音量とが共に増加し(時間t2)、その後、アクセルペダルが戻されてアクセル操作量が零(0)になるとエンジンを停止させ(時間t2)、エンジン音量が急激に低下して零(0)となり、また、エンジン回転数が零(0)付近となるが、車速が所定の値になり(時間t3)、その後に低下し始める。
アクセル操作量が零(0)になった時(時間t2)から時間Tが経過して、再度の加速時で、アクセルペダルが踏み込まれてアクセル操作量が増加するとエンジンを再始動させ(時間t4)、エンジン音量が増加し始め、そして、車速とエンジン回転数とが増加し、その後、アクセルペダルが戻されて零(0)になると(時間t5)、エンジンが停止し、エンジン音量とエンジン回転数とが急激に低下するが、車速は、所定の値になり(時間t6)、その後徐々に低下する。
Next, as shown in FIG. 12, in the control of a normal series hybrid vehicle, when the battery storage amount (SOC) is high, the drive motor is rotated only by the power of the battery without generating power by the engine.
In the control of this normal series hybrid vehicle, the engine is stopped when the accelerator pedal is not depressed. When the battery charge (SOC) is lowered to a certain level, when the accelerator pedal is depressed and driving force is required, the engine is started and power is generated. When the accelerator pedal is depressed, the engine speed is increased by the amount of accelerator operation corresponding to the depression of the accelerator pedal because the accelerator is linked.
Return the accelerator pedal to zero (0), and stop the engine. When the accelerator pedal is depressed again while the vehicle speed is at a predetermined value, the engine starts again, and the engine is driven by the amount of accelerator operation corresponding to the depression of the accelerator pedal. When the battery storage amount (SOC) becomes too low, power generation by the engine is maintained even when the vehicle is stopped.
More specifically, in the relationship between the vehicle speed, the engine speed, and the engine volume of the normal series hybrid vehicle in FIG. 12, when the accelerator pedal is depressed and the accelerator operation amount increases during acceleration (time t1). ) First, the vehicle speed starts increasing, then the engine is started (time t2), both the engine speed and the engine volume increase, and the accelerator pedal is returned to zero (0). Then (time t3), the engine is stopped to save fuel, and at this time, the engine speed and the engine volume are rapidly reduced to substantially zero (0).
When time T elapses from when the accelerator operation amount becomes zero (0) (time t3) and the accelerator pedal is depressed and the accelerator operation amount increases during acceleration, the engine is restarted (time t4). ) When the vehicle speed, the engine speed and the engine volume increase in proportion, and then the accelerator pedal is returned to zero (0) (time t5), the engine is stopped and the engine speed and the engine volume are reduced. Although the vehicle speed decreases rapidly, the vehicle speed gradually decreases.
Further, in the concept of the relationship between the vehicle speed, the engine speed, and the engine volume of the normal series hybrid vehicle in FIG. 13, when the accelerator pedal is depressed and the accelerator operation amount increases during acceleration (time t1), When the vehicle speed, the engine speed, and the engine volume all increase (time t2) and then the accelerator pedal is returned and the accelerator operation amount becomes zero (0), the engine is stopped (time t2). It decreases to zero (0), and the engine speed is close to zero (0), but the vehicle speed reaches a predetermined value (time t3), and then begins to decrease.
When time T elapses from when the accelerator operation amount becomes zero (0) (time t2) and the accelerator pedal is depressed and the accelerator operation amount increases during acceleration, the engine is restarted (time t4). ) When the engine volume starts to increase and the vehicle speed and the engine speed increase, and then the accelerator pedal is returned to zero (0) (time t5), the engine is stopped and the engine volume and the engine speed are increased. The vehicle speed decreases to a predetermined value (time t6), and then gradually decreases.
しかしながら、定点運転で効率の良い発電を行うことは、ドライバビリティを考慮した場合に不利となる。それは、運転者が今までの通常のガソリン車の反応に慣れているため、アクセルペダルを踏み込めば、エンジン回転数が上がり、アクセルペダルを戻せば、エンジン回転数が低くなるというものであるから、発電効果を高めるための制御で運転者の意図に反してアクセルペダルを少ししか踏んでいないにもかかわらず、高いエンジン回転数が維持され、車両速度に関係なく、エンジンが始動・停止されてしまうと違和感を与える。
上記のドライバビリティを考慮するために、運転者がアクセルペダルを踏み込み、パワー(トルクと回転数)を必要としたときに、エンジンを始動させて発電を行うアクセル連動型制御が一般的に用いられている。
また、アクセルペダルを戻し、車両が停止する場合は、エンジンを停止するアイドルストップ的な制御も組み込まれている。但し、バッテリ蓄電量(SOC)がある一定値を満たさない場合は、車速やアクセル操作量に関係なく、エンジンを始動させて発電を行っている。
However, efficient power generation by fixed point operation is disadvantageous when drivability is considered. Because the driver is accustomed to the reaction of the usual gasoline car so far, if the accelerator pedal is depressed, the engine speed will increase, and if the accelerator pedal is returned, the engine speed will decrease. Despite the fact that the accelerator pedal is depressed a little against the driver's intention in the control for enhancing the power generation effect, the high engine speed is maintained, and the engine is started and stopped regardless of the vehicle speed. And give a sense of incongruity.
In order to take into account the above drivability, accelerator-linked control is generally used to start the engine and generate power when the driver depresses the accelerator pedal and needs power (torque and rotation speed). ing.
In addition, when the accelerator pedal is returned and the vehicle stops, an idling stop control for stopping the engine is also incorporated. However, when the battery storage amount (SOC) does not satisfy a certain value, the engine is started to generate power regardless of the vehicle speed and the accelerator operation amount.
特許文献1に係るハイブリッド型車両は、エンジン回転数やトルク信号をフィードバックさせて、車両走行状態や運転状況に応じて好ましい状態でエンジンを停止したり、必要な状態でのみエンジンを始動するものである。
特許文献2に係るシリーズハイブリッド式電動車両は、バッテリ温度の状態によって充電装置を制御することで、停止時や低速走行時のエンジン音等を低減するものである。
特許文献3に係るシリーズハイブリッド車における発電制御方法及び装置は、最大エンジン回転数に基づいてエンジン回転数の目標値の上限を制限し、最大エンジン回転数を駆動モータの回転数に応じて変更するものである。
The hybrid vehicle according to Patent Document 1 feeds back the engine speed and torque signal, stops the engine in a preferable state according to the vehicle running state and driving state, or starts the engine only in a necessary state. is there.
The series hybrid electric vehicle according to Patent Literature 2 controls the charging device according to the state of the battery temperature, thereby reducing engine noise or the like during stoppage or low-speed traveling.
The power generation control method and apparatus in a series hybrid vehicle according to Patent Document 3 limits the upper limit of the target value of the engine speed based on the maximum engine speed, and changes the maximum engine speed according to the speed of the drive motor. Is.
ところが、従来、シリーズハイブリッド車両においては、エンジンのかけ方で発電効率とドライバビリティ(運転者の運転快適性)がうまく調和されていなかった。
例えば、エンジンの発電効率を優先的に考えると、エンジンの最も効率の良い1点でエンジンを動作させ、なるべくエンジンを停止しないでいることが良いとされている。
しかし、これでは、運転者にとって通常のガソリン車のようなアクセルペダルの踏み込み状態に応じたエンジン音が出ないため、不快や違和感を与えることになる。
次に、ドライバビリティを優先的に考えると、従来のガソリン車と同様に、アクセルペダルの踏み込み状態に応じてエンジン回転数とトルクとを制御することで、ドライバビリティを通常のガソリン車と同等にすることができる。
しかしながら、これでは、駆動と発電とを別々にできるシリーズハイブリッド車両の良さが失われ、エンジンの発電効率が悪く、燃費も低下するという不都合があった。
However, conventionally, in the series hybrid vehicle, the power generation efficiency and drivability (driving comfort of the driver) have not been well harmonized by the way the engine is started.
For example, when the power generation efficiency of the engine is given priority, it is recommended that the engine be operated at one point where the engine is most efficient and that the engine be stopped as much as possible.
However, in this case, the driver does not make an engine sound corresponding to the depressed state of the accelerator pedal as in a normal gasoline vehicle, which makes the driver uncomfortable and uncomfortable.
Next, considering drivability as a priority, as with conventional gasoline vehicles, the engine speed and torque are controlled in accordance with the accelerator pedal depression, so that drivability is equivalent to that of ordinary gasoline vehicles. can do.
However, in this case, the goodness of the series hybrid vehicle that can separately drive and generate power is lost, and the power generation efficiency of the engine is poor and the fuel consumption is also reduced.
そこで、この発明の目的は、燃費効率とドライバビリティの向上とを両立できるシリーズハイブリッド車両のエンジン制御装置を提供することにある。 SUMMARY OF THE INVENTION An object of the present invention is to provide an engine control device for a series hybrid vehicle that can achieve both fuel efficiency and improved drivability.
この発明は、エンジンと、このエンジンにより駆動される発電機と、この発電機により充電されるバッテリと、前記発電機の発電電力又は前記バッテリの放電電力により車輪を駆動する駆動モータとを備えるシリーズハイブリッド車両のエンジン制御装置において、車速を検出する車速検出手段を設け、アクセル操作量を検出するアクセル操作量検出手段を設け、前記車速検出手段により検出された車速と前記アクセル操作量検出手段により検出されたアクセル操作量とに基づいてエンジン回転数を制御する制御手段を設けたことを特徴とする。 The present invention is a series comprising an engine, a generator driven by the engine, a battery charged by the generator, and a drive motor for driving a wheel by the generated power of the generator or the discharged power of the battery. In the hybrid vehicle engine control device, a vehicle speed detecting means for detecting the vehicle speed is provided, an accelerator operation amount detecting means for detecting the accelerator operation amount is provided, and the vehicle speed detected by the vehicle speed detecting means and the accelerator operation amount detecting means are detected. The control means for controlling the engine speed based on the accelerator operation amount is provided.
この発明のシリーズハイブリッド車両のエンジン制御装置は、燃費効率を向上するとともに、ドライバビリティも向上できる。 The engine control apparatus for a series hybrid vehicle according to the present invention can improve fuel efficiency and drivability.
この発明は、燃費効率とドライバビリティの向上とを両立する目的を、アクセルペダルの踏み込み状態に応じてエンジン回転数を高くし、アクセルペダルを戻せば、エンジン回転数を低くして実現するものである。 This invention achieves the objective of achieving both fuel efficiency and improved drivability by increasing the engine speed according to the depressed state of the accelerator pedal and lowering the engine speed by returning the accelerator pedal. is there.
図1〜図8は、この発明の実施例を示すものである。
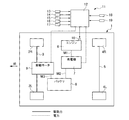
図1において、1はシリーズハイブリッド車両(以下「車両」という)、2Lは左前輪、2Rは右前輪、3は前車軸、4Lは左後輪、4Rは右後輪、5は後車軸である。
車両1は、エンジン6と、このエンジン6により駆動される発電機7と、この発電機7により充電されるバッテリ8と、発電機7の発電電力又はバッテリ8の放電電力により車輪としての左前輪2L・右前輪2Rを駆動する駆動モータ9とを備える。エンジン6には、燃料噴射弁10が取り付けられている。駆動モータ9は、前車軸3へ駆動力を出力して左前輪2L・右前輪2Rを駆動する。
エンジン6と発電機7とは、第1電力線M1で電気的に連絡している。発電機7とバッテリ8とは、第2電力線M2で電気的に連絡している。バッテリ8と駆動モータ9とは、第3電力線M3で電気的に連絡している。
エンジン6の燃料噴射弁10と発電機7と駆動モータ9とには、エンジン制御装置11を構成する制御手段12が連絡している。
制御手段12には、車速を検出する車速検出手段13と、アクセルペダルの踏み込み量としてのアクセル操作量を検出するアクセル操作量検出手段14と、ブレーキペダルの踏み込み量としてのブレーキ操作量を検出するブレーキ操作量検出手段15と、エンジン回転数を検出するエンジン回転数検出手段16と、バッテリ蓄電量検出手段17と、駆動モータ回転数検出手段18と、イグニションスイッチ(IG・SW)19とが連絡している。
1 to 8 show an embodiment of the present invention.
In FIG. 1, 1 is a series hybrid vehicle (hereinafter referred to as “vehicle”), 2L is a left front wheel, 2R is a right front wheel, 3 is a front axle, 4L is a left rear wheel, 4R is a right rear wheel, and 5 is a rear axle. .
The vehicle 1 includes an engine 6, a generator 7 driven by the engine 6, a battery 8 charged by the generator 7, and a left front wheel as a wheel by the generated power of the generator 7 or the discharged power of the battery 8. 2L and a drive motor 9 for driving the
The engine 6 and the generator 7 are in electrical communication with each other through the first power line M1. The generator 7 and the battery 8 are electrically connected by a second power line M2. The battery 8 and the drive motor 9 are electrically connected by a third power line M3.
Control means 12 constituting an
The control means 12 detects a vehicle speed detection means 13 for detecting the vehicle speed, an accelerator operation amount detection means 14 for detecting an accelerator operation amount as an accelerator pedal depression amount, and a brake operation amount as a brake pedal depression amount. The brake operation
制御手段12は、車速検出手段13により検出された車速とアクセル操作量検出手段14により検出されたアクセル操作量とに基づいてエンジン回転数を制御する。
制御手段12は、アクセル操作量検出手段14によりアクセル操作量が零(0)と検出された時に、エンジン回転数を下げる。
制御手段12は、アクセル操作量検出手段14によりアクセル操作量が零(0)と検出された状態で、かつブレーキ操作量検出手15段によりブレーキ操作量が零(0)と検出された状態が予め設定された一定時間継続する時に、エンジン6を停止する。
制御手段12は、アクセル操作量検出手段14によりアクセル操作量が零(0)と検出された状態で、かつ車速検出手段13により予め設定された第一の車速以下の状態が予め設定された一定時間継続する時に、エンジン6を停止する。この場合、アクセル操作量が零(0)と検出された状態で、かつ予め設定された第一の車速以下でブレーキ操作量が所定に検出された状態が予め設定された一定時間継続する時には、エンジン6を停止することも可能である。ここで、この「予め設定された第一の車速」とは、車両1が停止すると予測される車速であって、例えば、5km/hでも良いが、その値よりも高い車速の値に設定しても良い。
制御手段12は、アクセル操作量検出手段14によりアクセル操作量が所定に検出された状態で、かつ車速検出手段13により検出された車速が予め設定された第二の車速以上である時に、エンジン6を始動する。この「予め設定された第二の車速」は、上記の「予め設定された第一の車速」とは関係なく設定可能なものである。
制御手段12は、バッテリ8のバッテリ蓄電量(SOC:バッテリ残量)が予め設定された第一の蓄電量(20%)以上でかつ予め設定された第二の蓄電量(50%)以下である時に、つまり、車速連動型エンジン制御モード時に、エンジン回転数の制御を実行する。
制御手段12は、バッテリ8のバッテリ蓄電量(SOC)が予め設定された第一の蓄電量(20%)よりも少ない時に、つまり、強制エンジン発電モード時に、エンジン6を駆動し、アクセル操作量検出手段14により検出されたアクセル操作量が予め設定された設定操作量よりも大きい時には、車速検出手段13により検出された車速とアクセル操作量検出手段14により検出されたアクセル操作量とに基づいてエンジン回転数を制御する。
制御手段12は、上記の強制エンジン発電モード時にも、アクセル操作量検出手段14によりアクセル操作量が零(0)と検出された時に、エンジン回転数を下げる。
The control means 12 controls the engine speed based on the vehicle speed detected by the vehicle speed detection means 13 and the accelerator operation amount detected by the accelerator operation amount detection means 14.
The control means 12 decreases the engine speed when the accelerator operation amount detection means 14 detects that the accelerator operation amount is zero (0).
The control means 12 is in a state where the accelerator operation amount is detected as zero (0) by the accelerator operation amount detection means 14, and the brake operation amount is detected as zero (0) by the 15th step of the brake operation amount detector. The engine 6 is stopped when continuing for a preset fixed time.
The control means 12 is a state where the accelerator operation amount is detected as zero (0) by the accelerator operation amount detection means 14 and a state equal to or lower than the first vehicle speed preset by the vehicle speed detection means 13 is preset. When the time continues, the engine 6 is stopped. In this case, when the state where the accelerator operation amount is detected as zero (0) and the state where the brake operation amount is detected at a predetermined speed below the preset first vehicle speed continues for a predetermined period of time, It is also possible to stop the engine 6. Here, the “preset first vehicle speed” is a vehicle speed at which the vehicle 1 is predicted to stop, and may be, for example, 5 km / h, but is set to a vehicle speed higher than that value. May be.
When the accelerator operation amount is detected by the accelerator operation
The control means 12 is configured such that the battery storage amount (SOC: battery remaining amount) of the battery 8 is not less than the preset first accumulation amount (20%) and not more than the preset second accumulation amount (50%). At some time, that is, in the vehicle speed interlocking engine control mode, the engine speed is controlled.
The control means 12 drives the engine 6 when the battery storage amount (SOC) of the battery 8 is smaller than the preset first storage amount (20%), that is, in the forced engine power generation mode, and the accelerator operation amount. When the accelerator operation amount detected by the detection means 14 is larger than a preset set operation amount, based on the vehicle speed detected by the vehicle speed detection means 13 and the accelerator operation amount detected by the accelerator operation amount detection means 14. Controls engine speed.
The control means 12 also decreases the engine speed when the accelerator operation
次に、この実施例に係るエンジン制御を、図2のフローチャートに基づいて説明する。
図2に示すように、制御手段12のプログラムがスタートすると(ステップA01)、先ず、エンジン6を停止し(ステップA02)、アクセルペダルを踏み込み、アクセル操作量が大きくなって車速が所定値よりも上がったか否かを判断する(ステップA03)。このステップA03がNOの場合には、この判断を継続する。
このステップA03がYESの場合には、エンジン6を始動し、エンジン回転数を駆動モータ9のモータ回転数よりも高めに設定し、エンジン6による発電を強めに行う(ステップA04)。
そして、アクセルペダルが戻ってアクセル操作量が零(0)になったか否かを判断する(ステップA05)。このステップA05がNOの場合には、前記ステップA04に戻す。
このステップA05がYESの場合には、エンジン6を再始動し、エンジン回転数を駆動モータ9のモータ回転数よりも低めに設定し、エンジン6による発電を弱めに行う(ステップA06)。
その後、車速が低側になったか否かを判断する(ステップA07)。このステップA07がNOの場合には、前記ステップA03に戻す。
一方、このステップA07がYESの場合には、前記ステップA02に戻す。
Next, engine control according to this embodiment will be described based on the flowchart of FIG.
As shown in FIG. 2, when the program of the control means 12 is started (step A01), first, the engine 6 is stopped (step A02), the accelerator pedal is depressed, the accelerator operation amount increases, and the vehicle speed exceeds the predetermined value. It is determined whether or not it has been raised (step A03). If step A03 is NO, this determination is continued.
If this step A03 is YES, the engine 6 is started, the engine speed is set higher than the motor speed of the drive motor 9, and the power generation by the engine 6 is strengthened (step A04).
Then, it is determined whether or not the accelerator pedal returns and the accelerator operation amount becomes zero (0) (step A05). If step A05 is NO, the process returns to step A04.
If this step A05 is YES, the engine 6 is restarted, the engine speed is set lower than the motor speed of the drive motor 9, and the power generation by the engine 6 is weakened (step A06).
Thereafter, it is determined whether or not the vehicle speed has become low (step A07). If step A07 is NO, the process returns to step A03.
On the other hand, if step A07 is YES, the process returns to step A02.
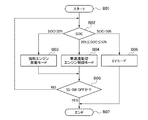
次いで、バッテリ蓄電量(SOC)に応じて各モードを切り替える制御について、図3のフローチャートに基づいて説明する。
図3に示すように、制御手段12のプログラムがスタートすると(ステップB01)、バッテリ蓄電量(SOC)が、SOC<20%、20%≦SOC≦50%、又は、SOC>50%のいずれかを判断する(ステップB02)。
このステップB02で、SOC<20%の場合には、強制エンジン発電モードとする(ステップB03)。
このステップB02で、20%≦SOC≦50%の場合には、車速連動型エンジン制御モードとする(ステップB04)。
このステップB02で、SOC>50%の場合には、電気車両(EV)モードとする(ステップB05)。
そして、前記ステップB03で強制エンジン発電モードの処理をした後、又は、前記ステップB04で車速連動型エンジン制御モードの処理をした後は、イグニションスイッチ19がオフか否かを判断する(ステップB06)。
このステップB06がNOの場合には、前記ステップB02に戻す。
一方、このステップB06がYESの場合、又は、前記ステップB05で電気車両(EV)モードの処理をした後は、プログラムをエンドとする(ステップB07)。
Next, control for switching each mode in accordance with the battery storage amount (SOC) will be described based on the flowchart of FIG.
As shown in FIG. 3, when the program of the control means 12 is started (step B01), the battery storage amount (SOC) is either SOC <20%, 20% ≦ SOC ≦ 50%, or SOC> 50%. Is determined (step B02).
If SOC <20% in step B02, the forced engine power generation mode is set (step B03).
If 20% ≦ SOC ≦ 50% in step B02, the vehicle speed interlocking engine control mode is set (step B04).
If SOC> 50% in step B02, the electric vehicle (EV) mode is set (step B05).
Then, after processing in the forced engine power generation mode in step B03 or processing in the vehicle speed interlocking engine control mode in step B04, it is determined whether or not the
When this step B06 is NO, it returns to said step B02.
On the other hand, if this step B06 is YES, or after processing in the electric vehicle (EV) mode in step B05, the program is ended (step B07).
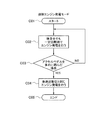
前記ステップB03における強制エンジン発電モードの処理は、図4のフローチャートに基づいて行われる。
この強制エンジン発電モードにおいては、バッテリ蓄電量(SOC)が低く、強制的にエンジン6による発電が必要となり、通常のシリーズハイブリッド車両と同様の制御となり、バッテリ蓄電量(SOC)を一定水準に維持するように制御が行われる。停車中でも、エンジン6は、停止させないでおく。バッテリ蓄電量(SOC)がある設定された蓄電量(閾値)を超えて高くなったならば、車速連動型エンジン制御モードの制御を行う。
図4に示すように、制御手段12において強制エンジン発電モードのプログラムがスタートすると(ステップC01)、停車中でも一定のエンジン回転数でエンジン6による発電を行い(ステップC02)、アクセルペダルを多めに踏み込んでアクセル操作量が所定値よりもに大きくなったか否かを判断する(ステップC03)。このステップC03がNOの場合には、前記ステップC02に戻す。
このステップC03がYESの場合には、車速連動型エンジン制御モードと同じように、エンジン6による発電を行い(ステップC04)、プログラムをエンドとする(ステップC05)。
The processing in the forced engine power generation mode in step B03 is performed based on the flowchart of FIG.
In this forced engine power generation mode, the battery storage amount (SOC) is low, and power generation by the engine 6 is forcibly required, and the control is the same as in a normal series hybrid vehicle, and the battery storage amount (SOC) is maintained at a constant level. Control is performed as follows. Even when the vehicle is stopped, the engine 6 is not stopped. If the battery storage amount (SOC) exceeds a set storage amount (threshold), the vehicle speed-linked engine control mode is controlled.
As shown in FIG. 4, when the forced engine power generation mode program is started in the control means 12 (step C01), power is generated by the engine 6 at a constant engine speed even when the vehicle is stopped (step C02), and the accelerator pedal is depressed a little. It is then determined whether or not the accelerator operation amount has become larger than a predetermined value (step C03). If step C03 is NO, the process returns to step C02.
If this step C03 is YES, as in the vehicle speed interlocking engine control mode, power is generated by the engine 6 (step C04), and the program is ended (step C05).
前記ステップB04における車速連動型エンジン制御モードの処理は、図5のフローチャートに基づいて行われる。
この車速連動型エンジン制御モードにおいては、ある一定水準にバッテリ蓄電量(SOC)が低くなり、アクセルペダルが踏み込まれたら、エンジン回転数を通常のガソリン車のエンジン回転数よりも高めに設定させ、さらに、エンジン回転数の増加量は、通常のガソリン車よりも大きく取る。アクセル操作量検出手段14により検出されたアクセル操作量が零(0)になっても、直ぐにエンジン6を停止させない。エンジン6は、通常のガソリン車のエンジン回転数よりも低めで、駆動し続ける。このようにすることで、微小時間によるエンジン6の始動・停止による損失を最小限とする。これは、エンジン音の増減を利用して運転者に変化を感じさせ、ドライバビリティを向上させる。通常のガソリン車は、アクセル操作量が零(0)になっても、エンジン6が動き続けており、エンジンブレーキ状態となるが、それを疑似化するものである。アクセルペダルが完全に戻り、ある一定時間と所定の車速以下で、ブレーキ状態を見て、エンジン6を停止する。
図5に示すように、制御手段12において車速連動型エンジン制御モードのプログラムがスタートすると(ステップD01)、アクセル操作量が設定値以上か否かを判断する(ステップD02)。
このステップD02がYESの場合には、加速モードとし、アクセル開度と車速とによってをエンジン回転数を決定する(ステップD03)。この場合、なるべくエンジン6の効率の良いエンジン回転数に早く近づくように、エンジン回転数を上げる。
一方、このステップD02がNOの場合には、ブレーキ操作量が設定値以上か否かを判断する(ステップD04)。
このステップD04がYESの場合には、ブレーキ回生と停止モードとし、ある一定期間のブレーキ状態と車両1の停止により、エンジン6を停止させる(ステップD05)。
一方、このステップD04がNOの場合には、コースト回生モードとし、加速モード時のエンジン回転数以下、通常のガソリン車のエンジン回転数と同等若しくはそれ以下で、エンジン回転数を下げる(ステップD06)。
前記ステップD03の処理後、前記ステップD05の処理後、又は、前記ステップD06の処理後は、プログラムをエンドとする(ステップD07)。
The processing in the vehicle speed interlocking engine control mode in step B04 is performed based on the flowchart of FIG.
In this vehicle speed interlocking engine control mode, when the battery charge (SOC) is lowered to a certain level and the accelerator pedal is depressed, the engine speed is set higher than the engine speed of a normal gasoline vehicle, Furthermore, the amount of increase in the engine speed is larger than that of a normal gasoline vehicle. Even if the accelerator operation amount detected by the accelerator operation amount detection means 14 becomes zero (0), the engine 6 is not immediately stopped. The engine 6 continues to drive at a lower speed than that of a normal gasoline vehicle. By doing so, the loss due to the start / stop of the engine 6 due to a minute time is minimized. This makes the driver feel the change by using the increase / decrease in engine sound and improves drivability. In a normal gasoline vehicle, even if the accelerator operation amount becomes zero (0), the engine 6 continues to operate and enters an engine brake state, which is simulated. The accelerator pedal returns completely, and the engine 6 is stopped after seeing the brake state for a certain time and below a predetermined vehicle speed.
As shown in FIG. 5, when the vehicle speed-linked engine control mode program is started in the control means 12 (step D01), it is determined whether or not the accelerator operation amount is equal to or greater than a set value (step D02).
If this step D02 is YES, the acceleration mode is set, and the engine speed is determined based on the accelerator opening and the vehicle speed (step D03). In this case, the engine speed is increased so as to approach the engine speed at which the engine 6 is efficient as much as possible.
On the other hand, if this step D02 is NO, it is determined whether or not the brake operation amount is not less than the set value (step D04).
If this step D04 is YES, the brake regeneration and stop modes are set, and the engine 6 is stopped by the brake state for a certain period and the stop of the vehicle 1 (step D05).
On the other hand, if this step D04 is NO, the coast regeneration mode is set, and the engine speed is lowered below the engine speed in the acceleration mode and equal to or less than the engine speed of a normal gasoline vehicle (step D06). .
After the process of step D03, after the process of step D05, or after the process of step D06, the program is ended (step D07).
前記ステップB05における電気車両(EV)モードの処理は、図6のフローチャートに基づいて行われる。
この電気車両(EV)モードにおいては、バッテリ蓄電量(SOC)が高いので、従来通りのエンジン6による発電を行わず、バッテリ8のみの電力で左前輪2L・右前輪2Rを駆動する。但し、高速道路と判断した場合には、エンジン6を始動させ、先にバッテリ8の低下を予測して、エンジン6による発電に入る。このとき、過剰にバッテリ蓄電量(SOC)が高くならない程度に、バッテリ蓄電量(SOC)の維持を優先的に考えたエンジン6の制御を行う。
図6に示すように、制御手段12において電気車両(EV)モードのプログラムがスタートすると(ステップE01)、高速道路か否かを判断する(ステップE02)。
このステップE02がYESの場合には、バッテリ蓄電量(SOC)が設定値(例えば、99.5%)以上か否かを判断する(ステップE03)。
このステップE03がYESの場合、又は、前記ステップE02がNOの場合には、エンジン6による発電せず、電気車両(EV)としてのみ走行する(ステップE04)。
一方、このステップE03がNOの場合には、高速道路モードとし、車速に応じて最も効率の良いエンジン回転数、若しくは、通常のガソリン車と同等のエンジン回転数又はそれ以上のエンジン回転数で発電を行い、現状のバッテリ蓄電量(SOC)を維持する(ステップE05)。
前記ステップE04の処理後、又は、前記ステップE05の処理後は、プログラムをエンドとする(ステップE06)。
The electric vehicle (EV) mode process in step B05 is performed based on the flowchart of FIG.
In this electric vehicle (EV) mode, since the battery storage amount (SOC) is high, power generation by the engine 6 is not performed as usual, and the
As shown in FIG. 6, when the program of the electric vehicle (EV) mode is started in the control means 12 (step E01), it is determined whether or not the road is an expressway (step E02).
If this step E02 is YES, it is determined whether or not the battery storage amount (SOC) is equal to or greater than a set value (for example, 99.5%) (step E03).
When this step E03 is YES or when the step E02 is NO, the engine 6 does not generate electricity and travels only as an electric vehicle (EV) (step E04).
On the other hand, if this step E03 is NO, the highway mode is set, and power generation is performed at the most efficient engine speed according to the vehicle speed, or at an engine speed equal to or higher than that of a normal gasoline vehicle. To maintain the current battery charge (SOC) (step E05).
After the process of step E04 or after the process of step E05, the program is ended (step E06).
即ち、この実施例に係るエンジン制御では、バッテリ蓄電量(SOC)が低い場合の強制エンジン発電モードと、バッテリ蓄電量(SOC)が高い場合の電気車両(EV)モードと、これらモードの中間の車速連動型エンジン制御モードとの3つのモードを設定し、それぞれのモードでエンジン6の発電方法を変化させている。
特に、車速連動型エンジン制御モードは、エンジン6の発電を車速に連動させることで、エンジン回転数の違和感によるドライバビリティを改善する車連連動型とした。通常のガソリン車では、ギヤポジションで車速に対してエンジン回転数の幅は変わるが、車速とエンジン回転数とは基本的に比例するので、車速が高くなればエンジン回転数も高くなる。従って、車速が高い場合には、エンジン6をかけてもドライバビリティは悪化しない。
通常のガソリン車の加速時は、燃料としてのガソリンを噴射して爆発音が大きくなり、アクセル操作量を少なくすると、エンジン回転数は変わらなくても、爆発音が無くなるので、エンジン音量は、小さくなる。
そこで、この実施例では、アクセルペダルを踏み込んだ加速時には、車速に応じて高めにエンジン6を駆動させて発電をし、アクセルペダルが戻った時には、車速に合わせて少し弱めに発電をするような緩急をつけてエンジン6を制御することで、ドライバビリティを向上させることができる。
その結果、燃費は定点運転に近く、ドライバビリティは通常のガソリン車のような感覚で走行することができる。
That is, in the engine control according to this embodiment, the forced engine power generation mode when the battery storage amount (SOC) is low, the electric vehicle (EV) mode when the battery storage amount (SOC) is high, and an intermediate between these modes. Three modes, a vehicle speed interlocking engine control mode, are set, and the power generation method of the engine 6 is changed in each mode.
In particular, the vehicle speed-linked engine control mode is a vehicle linkage-linked type that improves drivability due to the uncomfortable feeling of the engine speed by linking the power generation of the engine 6 to the vehicle speed. In a normal gasoline vehicle, the range of the engine speed changes with respect to the vehicle speed at the gear position. However, since the vehicle speed and the engine speed are basically proportional, the engine speed increases as the vehicle speed increases. Therefore, when the vehicle speed is high, drivability does not deteriorate even when the engine 6 is started.
When accelerating a normal gasoline car, the explosion sound is increased by injecting gasoline as fuel, and if the accelerator operation amount is reduced, the explosion sound is lost even if the engine speed does not change. Become.
Therefore, in this embodiment, when the accelerator pedal is depressed, the engine 6 is driven higher in accordance with the vehicle speed to generate electric power, and when the accelerator pedal returns, the electric power is generated slightly weakly in accordance with the vehicle speed. By controlling the engine 6 with gradual speed, drivability can be improved.
As a result, the fuel consumption is close to a fixed point driving, and the drivability can be driven like a normal gasoline car.
次いで、この実施例に係る車速連動型エンジン制御における車速とエンジン回転数とエンジン音量との関係を、図7のタイムチャートに基づいて説明する。
この車速連動型制御における車速とエンジン回転数とエンジン音量との関係においては、バッテリ蓄電量(SOC)が高い場合、エンジン6による発電をしないで、バッテリ8の電力のみで駆動モータ9を回転させて車両1を走行する。但し、高速走行と認識した場合は、エンジン6による発電を行い、それ以外では、エンジン6を停止状態とする。
そして、バッテリ蓄電量(SOC)が一定水準まで低くなった場合に、車速に連動してエンジン6での発電を開始する。エンジン6の動作回転数は、通常のガソリン車よりも高めに設定する。また、さらに加速した場合のエンジン回転数の増加分は、通常のガソリン車の場合よりも多くする。
また、アクセル操作量が零(0)になると、通常の駆動モータ9のモータ回転数を下回るエンジン回転数を維持する。この回転数の差により、ドライバビリティを維持させる。再度アクセル操作量が増加すると、エンジン6が停止していた場合には、エンジン6を始動し、同じようにアクセルペダルを踏んだ分よりも高めにエンジン回転数を設定して出力させる。
更に、アクセル操作量が零(0)、ブレーキ操作量が設定値以上で、一定時間経過後の場合に、エンジン6を停止する。
そして、バッテリ残量(SOC)があまりに低くなった場合には、停車中でもエンジン6による発電を維持する。設定されたバッテリ蓄電量(SOC)の値になるまで、エンジン6による発電を行う。また、アクセル操作量が多い場合には、車速連動型エンジン制御で多めにエンジン6による発電をする。
具体的には、図7における車速連動型制御における車速とエンジン回転数とエンジン音量との関係においては、加速時で、アクセルペダルが踏み込まれてアクセル操作量が増加すると(時間t1)、先ず、車速が上がり、そして、エンジン6始動させ(時間t2)、エンジン回転数とエンジン音量とが共に増加する。この場合、エンジン回転数は、車速に合わせて従来よりも高めに設定される。これにより、エンジン6による発電を多くできる。
その後、アクセルペダルが戻されてアクセル操作量が零(0)になると(時間t3)、その時(時間t3)から再度アクセルペダルが踏み込まれてアクセル操作量が増加するまで(時間t4)の時間Tにおいては、車速連動型にしていることから、アクセル操作量が零(0)でも、車速に対応してエンジン6による発電を行い、通常のガソリン車がエンジンブレーキ音となると同様に、発電が少なくなることで、発電を弱めてドライバビリティとエンジン効率とを向上できる。
そして、再度の加速時で、アクセルペダルが踏み込まれてアクセル操作量が増加し始めると(時間t4)、車速とエンジン回転数とエンジン音量とが共に増加する。この場合、エンジン回転数は、車速に合わせて従来よりも高めに設定される。これにより、エンジン6による発電を多くできる。
その後、ブレーキペダルが踏み込まれてブレーキ量が設定値以上になると(時間t5)、車速は徐々に低下するが、エンジン回転数とエンジン音量とは、車速とは比例せず、急激に減少する。
その後、ブレーキペダルが踏み込まれた時(時間t5)から一定時間S経過した時に(時間t6)、エンジン6が停止する。
また、図8における車速連動型制御における車速とエンジン回転数とエンジン音量との関係の概念においては、加速時で、アクセルペダルが踏み込まれてアクセル操作量が増加すると(時間t1)、車速とエンジン回転数とエンジン音量とが共に増加し、その後、アクセルペダルが戻されてアクセル操作量が零(0)になると(時間t2)、エンジン音量が低下し、その後、エンジン回転数が低下し始める(時間t3)。また、エンジン回転数は、所定の値になり(時間t4)、その後に低下し始める。
そして、アクセル操作量が零(0)になった時(時間t2)から時間Tが経過して、再度の加速時で、アクセルペダルが踏み込まれると(時間t5)、エンジン回転数とエンジン音量とが高くなり始め、その後、車速も上がり、そして、アクセル操作量が零(0)になる時には(時間t6)、エンジン負荷が高い時には高めにエンジン6により発電し、エンジン負荷が低い時には低めにエンジン6により発電させる。そして、車速は、所定の値になり(時間t7)、その後、エンジン回転数及びエンジン音量と略比例して低下する。
Next, the relationship among the vehicle speed, engine speed, and engine volume in the vehicle speed interlocking engine control according to this embodiment will be described based on the time chart of FIG.
In the relationship between the vehicle speed, the engine speed, and the engine volume in the vehicle speed interlocking control, when the battery storage amount (SOC) is high, the drive motor 9 is rotated only by the power of the battery 8 without generating power by the engine 6. The vehicle 1 travels. However, if it is recognized that the vehicle is traveling at high speed, power is generated by the engine 6, and otherwise the engine 6 is stopped.
Then, when the battery storage amount (SOC) is lowered to a certain level, power generation by the engine 6 is started in conjunction with the vehicle speed. The operation speed of the engine 6 is set higher than that of a normal gasoline vehicle. Further, the increase in the engine speed when further accelerating is made larger than that in the case of a normal gasoline vehicle.
Further, when the accelerator operation amount becomes zero (0), the engine speed lower than the motor speed of the normal drive motor 9 is maintained. The drivability is maintained by the difference in rotation speed. When the accelerator operation amount increases again, if the engine 6 is stopped, the engine 6 is started, and similarly, the engine speed is set higher than the amount of depression of the accelerator pedal and output.
Further, the engine 6 is stopped when the accelerator operation amount is zero (0), the brake operation amount is equal to or greater than the set value, and a fixed time has elapsed.
When the remaining battery level (SOC) becomes too low, power generation by the engine 6 is maintained even when the vehicle is stopped. Power generation by the engine 6 is performed until the value of the set battery storage amount (SOC) is reached. When the accelerator operation amount is large, the engine 6 generates a larger amount of power with vehicle speed interlocking engine control.
Specifically, in the relationship among the vehicle speed, the engine speed, and the engine volume in the vehicle speed interlocking control in FIG. 7, when the accelerator pedal is depressed and the accelerator operation amount increases during acceleration (time t1), first, The vehicle speed increases, and the engine 6 is started (time t2), and both the engine speed and the engine volume increase. In this case, the engine speed is set higher than in the prior art in accordance with the vehicle speed. Thereby, the electric power generation by the engine 6 can be increased.
Thereafter, when the accelerator pedal is returned and the accelerator operation amount becomes zero (0) (time t3), the time T from the time (time t3) to when the accelerator pedal is depressed again to increase the accelerator operation amount (time t4). Since the vehicle is linked to the vehicle speed, even if the amount of accelerator operation is zero (0), power is generated by the engine 6 in response to the vehicle speed. As a result, power generation can be weakened to improve drivability and engine efficiency.
Then, when the accelerator pedal is depressed and the accelerator operation amount starts to increase during time of acceleration again (time t4), all of the vehicle speed, the engine speed, and the engine volume increase. In this case, the engine speed is set higher than in the prior art in accordance with the vehicle speed. Thereby, the electric power generation by the engine 6 can be increased.
Thereafter, when the brake pedal is depressed and the brake amount becomes equal to or greater than the set value (time t5), the vehicle speed gradually decreases. However, the engine speed and the engine volume are not proportional to the vehicle speed and rapidly decrease.
Thereafter, the engine 6 is stopped when a certain time S has elapsed (time t6) from when the brake pedal is depressed (time t5).
Further, in the concept of the relationship between the vehicle speed, the engine speed, and the engine volume in the vehicle speed interlocking control in FIG. 8, when the accelerator pedal is depressed and the accelerator operation amount increases during acceleration (time t1), the vehicle speed and the engine are increased. When both the rotational speed and the engine volume increase, and then the accelerator pedal is returned and the accelerator operation amount becomes zero (0) (time t2), the engine volume decreases, and then the engine speed begins to decrease ( Time t3). Further, the engine speed becomes a predetermined value (time t4), and thereafter starts to decrease.
Then, when the accelerator operation amount becomes zero (0) (time t2) and time T elapses and the accelerator pedal is depressed (time t5) at the time of acceleration again, the engine speed, the engine volume, Starts to increase, then the vehicle speed also increases, and when the accelerator operation amount becomes zero (0) (time t6), when the engine load is high, power is generated by the engine 6, and when the engine load is low, the engine is lowered. 6 to generate power. Then, the vehicle speed becomes a predetermined value (time t7), and then decreases substantially in proportion to the engine speed and the engine volume.
以上、この発明の実施例について説明してきたが、上述の実施例の構成を請求項毎に当てはめて説明する。
請求項1に係る発明では、制御手段12は、車速検出手段13により検出された車速とアクセル操作量検出手段14により検出されたアクセル操作量とに基づいてエンジン回転数を制御する。
これにより、ドライバビリティを悪化させないで、燃費を向上することができる。
請求項2に係る発明では、制御手段12は、アクセル操作量検出手段14によりアクセル操作量が零と検出された時に、エンジン回転数を下げる。
これにより、エンジン6の停止及び再始動による効率悪化を防ぐことができる。また、擬似的に通常のガソリン車のエンジンブレーキがかかった状態とするため、運転者はガソリン車のような感覚で走行することができる
請求項3に係る発明では、制御手段12は、ブレーキ操作量を検出するブレーキ操作量検出手段15に連絡し、アクセル操作量検出手段14によりアクセル操作量が零と検出された状態で、かつブレーキ操作量検出手段15によりブレーキ操作量が零と検出された状態が予め設定された一定時間継続する時に、エンジン6を停止する。
これにより、車両1が停止することを精度良く予測し、車両1が走行し続けると予測される場合、エンジン6を停止させないため、エンジン6の停止及び再始動による効率悪化を防ぐことができる。一方、車両1が停止すると予測される場合、エンジン6を停止して燃料を節約することができる。
請求項4に係る発明では、制御手段12は、アクセル操作量検出手段14によりアクセル操作量が零と検出された状態で、かつ車速検出手段13により予め設定された第一の車速以下の状態が予め設定された一定時間継続する時に、エンジン6を停止する。
これにより、車両1が停止することを精度良く予測し、車両1が走行し続けると予測される場合、エンジン6を停止させないため、エンジン6の停止及び再始動による効率悪化を防ぐことができる。一方、車両1が停止すると予測される場合、エンジン6を停止して燃料を節約することができる。
請求項5に係る発明では、制御手段12は、アクセル操作量検出手段14によりアクセル操作量が所定に検出された状態で、かつ車速検出手段13により検出された車速が予め設定された第二の車速以上である時に、エンジン6を始動する。
これにより、車両1が走行し続けることを精度良く予測し、車両1が走行し続けると予測される場合、エンジン6を始動させるため、エンジン6の停止及び再始動による効率悪化を防ぐことができる。一方、車両1が停止すると予測される場合、エンジン6を停止させたままにして燃料を節約することができる。
請求項6に係る発明では、制御手段12は、バッテリ8のバッテリ蓄電量(SOC)が予め設定された第一の蓄電量以上でかつ予め設定された第二の蓄電量以下である時に、エンジン回転数の制御を実行する。
これにより、バッテリ蓄電量(SOC)が多い場合、バッテリ8を充電する必要がないため、エンジン6を停止させることができる。一方、バッテリ蓄電量(SOC)が少ない場合、走行状態に関係なく充電する必要があるため、エンジン6を回転させることができる。
請求項7に係る発明では、制御手段12は、バッテリ8のバッテリ蓄電量(SOC)が予め設定された第一の蓄電量よりも少ない時に、エンジン6を駆動し、アクセル操作量検出手段14により検出されたアクセル操作量が予め設定された設定操作量よりも大きい時には、車速検出手段13により検出された車速とアクセル操作量検出手段14により検出されたアクセル操作量とに基づいてエンジン回転数を制御する。
これにより、バッテリ蓄電量(SOC)が少ない場合に、ドライバビリティを悪化させないで、バッテリ8の充電量を増やすことができる。
請求項8に係る発明では、制御手段12は、上記の請求項7に係る発明に関連して、アクセル操作量検出手段14によりアクセル操作量が零と検出された時に、エンジン回転数を下げる。
これにより、擬似的に通常のガソリン車のエンジンブレーキがかかった状態とするため、運転者は通常のガソリン車のような感覚で走行することができる
Although the embodiments of the present invention have been described above, the configuration of the above-described embodiments will be described for each claim.
In the first aspect of the invention, the control means 12 controls the engine speed based on the vehicle speed detected by the vehicle speed detection means 13 and the accelerator operation amount detected by the accelerator operation amount detection means 14.
Thereby, fuel consumption can be improved without deteriorating drivability.
In the invention according to
Thereby, the efficiency deterioration by the stop and restart of the engine 6 can be prevented. In addition, since the engine brake of a normal gasoline vehicle is applied in a pseudo manner, the driver can travel like a gasoline vehicle. In the invention according to claim 3, the control means 12 includes a brake operation. The brake operation amount detection means 15 for detecting the amount is in contact, the accelerator operation amount detection means 14 detects that the accelerator operation amount is zero, and the brake operation amount detection means 15 detects that the brake operation amount is zero. The engine 6 is stopped when the state continues for a predetermined time.
As a result, when the vehicle 1 is accurately predicted to stop and the vehicle 1 is predicted to continue running, the engine 6 is not stopped, so that deterioration in efficiency due to the stop and restart of the engine 6 can be prevented. On the other hand, when the vehicle 1 is predicted to stop, the engine 6 can be stopped to save fuel.
In the invention according to
As a result, when the vehicle 1 is accurately predicted to stop and the vehicle 1 is predicted to continue running, the engine 6 is not stopped, so that deterioration in efficiency due to the stop and restart of the engine 6 can be prevented. On the other hand, when the vehicle 1 is predicted to stop, the engine 6 can be stopped to save fuel.
In the invention according to
As a result, when the vehicle 1 is predicted to continue traveling with high accuracy and the vehicle 1 is predicted to continue traveling, the engine 6 is started, so that deterioration in efficiency due to the stop and restart of the engine 6 can be prevented. . On the other hand, when the vehicle 1 is predicted to stop, the engine 6 can be kept stopped to save fuel.
In the invention according to claim 6, the control means 12 is configured such that when the battery storage amount (SOC) of the battery 8 is equal to or greater than the preset first accumulation amount and equal to or less than the preset second accumulation amount. Control the number of revolutions.
Thereby, when there is much battery charge amount (SOC), since it is not necessary to charge the battery 8, the engine 6 can be stopped. On the other hand, when the battery storage amount (SOC) is small, the engine 6 can be rotated because it is necessary to charge the battery regardless of the traveling state.
In the invention according to claim 7, the control means 12 drives the engine 6 when the battery storage amount (SOC) of the battery 8 is smaller than the preset first storage amount, and the accelerator operation amount detection means 14 When the detected accelerator operation amount is larger than the preset set operation amount, the engine speed is determined based on the vehicle speed detected by the vehicle speed detection means 13 and the accelerator operation amount detected by the accelerator operation amount detection means 14. Control.
Thereby, when the battery charge amount (SOC) is small, the charge amount of the battery 8 can be increased without deteriorating drivability.
In the invention according to claim 8, in relation to the invention according to claim 7, the control means 12 reduces the engine speed when the accelerator operation
As a result, the engine brake of a normal gasoline vehicle is applied in a pseudo manner, so that the driver can travel like a normal gasoline vehicle.
この発明に係るエンジン制御装置を、各種車両に適用可能である。 The engine control device according to the present invention can be applied to various vehicles.
1 車両
6 エンジン
7 発電機
8 バッテリ
9 駆動モータ
10 燃料噴射弁
11 エンジン制御装置
12 制御手段
13 車速検出手段
14 アクセル操作量検出手段
15 ブレーキ操作量検出手段
16 エンジン回転数検出手段
17 バッテリ蓄電量検出手段
18 駆動モータ回転数検出手段
19 イグニションスイッチ
DESCRIPTION OF SYMBOLS 1 Vehicle 6 Engine 7 Generator 8 Battery 9
Claims (8)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011003707A JP2012144138A (en) | 2011-01-12 | 2011-01-12 | Engine control device of series hybrid vehicle |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011003707A JP2012144138A (en) | 2011-01-12 | 2011-01-12 | Engine control device of series hybrid vehicle |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012144138A true JP2012144138A (en) | 2012-08-02 |
Family
ID=46788186
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011003707A Pending JP2012144138A (en) | 2011-01-12 | 2011-01-12 | Engine control device of series hybrid vehicle |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012144138A (en) |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014156221A (en) * | 2013-02-18 | 2014-08-28 | Mazda Motor Corp | Hybrid vehicle control device |
| DE102013220343A1 (en) | 2013-05-07 | 2014-11-13 | Mitsubishi Electric Corp. | Series hybrid vehicle |
| JP2015223954A (en) * | 2014-05-28 | 2015-12-14 | トヨタ自動車株式会社 | Hybrid electric vehicle and hybrid electric vehicle control method |
| JP2016000537A (en) * | 2014-06-11 | 2016-01-07 | 三菱自動車工業株式会社 | Driving assistance device |
| JP2019104444A (en) * | 2017-12-14 | 2019-06-27 | 本田技研工業株式会社 | Vehicle control system, vehicle control method, and program |
| CN110194147A (en) * | 2018-02-27 | 2019-09-03 | 大众汽车有限公司 | For running the method and motor vehicle of the series-parallel mixed dynamic driving system of motor vehicle |
| CN110799373A (en) * | 2017-06-30 | 2020-02-14 | 本田技研工业株式会社 | vehicle controls |
| US20220258722A1 (en) * | 2021-02-12 | 2022-08-18 | Honda Motor Co., Ltd. | Vehicle control device |
| JPWO2023181123A1 (en) * | 2022-03-22 | 2023-09-28 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06245321A (en) * | 1993-02-19 | 1994-09-02 | Toyota Motor Corp | Control device for engine driven generator for electric vehicle |
| JPH09154205A (en) * | 1995-11-28 | 1997-06-10 | Aqueous Res:Kk | Hybrid vehicle |
| JP2001095102A (en) * | 1999-09-22 | 2001-04-06 | Yamaha Motor Co Ltd | Series hybrid electric vehicle |
| JP2009040211A (en) * | 2007-08-08 | 2009-02-26 | Toyota Industries Corp | Regenerative power control method and apparatus for hybrid vehicle |
| JP2010173389A (en) * | 2009-01-28 | 2010-08-12 | Nissan Motor Co Ltd | Controller for series hybrid car |
-
2011
- 2011-01-12 JP JP2011003707A patent/JP2012144138A/en active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH06245321A (en) * | 1993-02-19 | 1994-09-02 | Toyota Motor Corp | Control device for engine driven generator for electric vehicle |
| JPH09154205A (en) * | 1995-11-28 | 1997-06-10 | Aqueous Res:Kk | Hybrid vehicle |
| JP2001095102A (en) * | 1999-09-22 | 2001-04-06 | Yamaha Motor Co Ltd | Series hybrid electric vehicle |
| JP2009040211A (en) * | 2007-08-08 | 2009-02-26 | Toyota Industries Corp | Regenerative power control method and apparatus for hybrid vehicle |
| JP2010173389A (en) * | 2009-01-28 | 2010-08-12 | Nissan Motor Co Ltd | Controller for series hybrid car |
Cited By (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2014156221A (en) * | 2013-02-18 | 2014-08-28 | Mazda Motor Corp | Hybrid vehicle control device |
| DE102013220343A1 (en) | 2013-05-07 | 2014-11-13 | Mitsubishi Electric Corp. | Series hybrid vehicle |
| CN106458006B (en) * | 2014-05-28 | 2019-09-17 | 丰田自动车株式会社 | Hybrid vehicle and control method thereof |
| JP2015223954A (en) * | 2014-05-28 | 2015-12-14 | トヨタ自動車株式会社 | Hybrid electric vehicle and hybrid electric vehicle control method |
| KR20160148628A (en) * | 2014-05-28 | 2016-12-26 | 도요타지도샤가부시키가이샤 | Hybrid vehicle and control method for same |
| CN106458006A (en) * | 2014-05-28 | 2017-02-22 | 丰田自动车株式会社 | Hybrid vehicle and control method thereof |
| KR101865493B1 (en) * | 2014-05-28 | 2018-06-07 | 도요타지도샤가부시키가이샤 | Hybrid vehicle and control method for same |
| US10322714B2 (en) | 2014-05-28 | 2019-06-18 | Toyota Jidosha Kabushiki Kaisha | Hybrid vehicle and control method for same |
| JP2016000537A (en) * | 2014-06-11 | 2016-01-07 | 三菱自動車工業株式会社 | Driving assistance device |
| CN110799373A (en) * | 2017-06-30 | 2020-02-14 | 本田技研工业株式会社 | vehicle controls |
| JP2019104444A (en) * | 2017-12-14 | 2019-06-27 | 本田技研工業株式会社 | Vehicle control system, vehicle control method, and program |
| CN110194147A (en) * | 2018-02-27 | 2019-09-03 | 大众汽车有限公司 | For running the method and motor vehicle of the series-parallel mixed dynamic driving system of motor vehicle |
| CN110194147B (en) * | 2018-02-27 | 2023-12-08 | 大众汽车有限公司 | Method for operating a series-parallel hybrid drive train of a motor vehicle and motor vehicle |
| US20220258722A1 (en) * | 2021-02-12 | 2022-08-18 | Honda Motor Co., Ltd. | Vehicle control device |
| CN114919564A (en) * | 2021-02-12 | 2022-08-19 | 本田技研工业株式会社 | Vehicle control device |
| US11938921B2 (en) * | 2021-02-12 | 2024-03-26 | Honda Motor Co., Ltd. | Vehicle control device |
| CN114919564B (en) * | 2021-02-12 | 2025-11-04 | 本田技研工业株式会社 | Vehicle control device |
| JPWO2023181123A1 (en) * | 2022-03-22 | 2023-09-28 | ||
| JP7687524B2 (en) | 2022-03-22 | 2025-06-03 | 三菱自動車工業株式会社 | Hybrid Vehicles |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2012144138A (en) | Engine control device of series hybrid vehicle | |
| JP5645124B2 (en) | Series hybrid vehicle control system | |
| JP5928683B2 (en) | Electric vehicle power supply control device | |
| CN107672464B (en) | Power supply control device and power supply control system | |
| RU2619067C2 (en) | Device for controlling battery charge, method for charging control, computer program and recording medium | |
| KR101339264B1 (en) | Method and system for controlling charge and discharge for a hybrid electric vehicle | |
| JP5048824B2 (en) | Vehicle power generation control device | |
| US8948943B2 (en) | Drive control system in series-hybrid vehicle | |
| US8103406B2 (en) | Vehicle control apparatus | |
| US9923490B2 (en) | Vehicle | |
| CN105599636B (en) | By the vehicle of electrical motor driven and the control method of vehicle | |
| JP6268665B2 (en) | Control device for hybrid vehicle | |
| JP2021011155A (en) | Hybrid vehicle control device | |
| US11110919B2 (en) | Cruise control system and cruise control method for mild hybrid electric vehicle | |
| JP2012070581A (en) | Power supply device for vehicle | |
| JP2019213446A (en) | Vehicle control device | |
| WO2022163136A1 (en) | Hybrid vehicle control device | |
| JP4072913B2 (en) | Vehicle battery management device | |
| JP6508449B2 (en) | Control device of electric vehicle | |
| JP6277975B2 (en) | Idling stop control device | |
| JP2004222475A (en) | Power supply control device for vehicles | |
| JP2013169857A (en) | Hybrid control system in hybrid vehicle | |
| KR20210061514A (en) | Apparatus and method for preventing driver's misoperating driver's of mild hybrid electric vehicle | |
| JP2015009746A (en) | Control device for hybrid vehicle | |
| JP7624907B2 (en) | Control device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130827 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140130 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140228 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140423 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20141023 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150116 |
|
| A911 | Transfer to examiner for re-examination before appeal (zenchi) |
Free format text: JAPANESE INTERMEDIATE CODE: A911 Effective date: 20150123 |
|
| A912 | Re-examination (zenchi) completed and case transferred to appeal board |
Free format text: JAPANESE INTERMEDIATE CODE: A912 Effective date: 20150306 |