JP2012139363A - Pachinko game machine - Google Patents
Pachinko game machine Download PDFInfo
- Publication number
- JP2012139363A JP2012139363A JP2010293974A JP2010293974A JP2012139363A JP 2012139363 A JP2012139363 A JP 2012139363A JP 2010293974 A JP2010293974 A JP 2010293974A JP 2010293974 A JP2010293974 A JP 2010293974A JP 2012139363 A JP2012139363 A JP 2012139363A
- Authority
- JP
- Japan
- Prior art keywords
- movable body
- body accessory
- game
- main game
- temporary storage
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






























































Landscapes
- Pinball Game Machines (AREA)
- Display Devices Of Pinball Game Machines (AREA)
Abstract
Description
ぱちんこ遊技機に関する。 It relates to pachinko machines.
現在最も普及しているぱちんこ遊技機は、始動口(スタートチャッカー)に遊技球が入球したことを契機として、7セグ等の表示部上で「特別図柄」と称される図柄が変動表示され、当該特別図柄が特定態様(例えば「7」)となった場合、通常遊技状態よりも遊技者にとって利益状態の高い特別遊技状態{通常時は閉状態にある大入賞口(アタッカー)が所定条件で開放する内容の遊技}に移行するタイプの、いわゆる「デジパチ」と呼ばれている機種(従来の「第一種遊技機」)である。ここで、遊技者の利益に直結する特別図柄の表示制御の負担を軽減するために、前記の「特別図柄」とは別に、遊技の興趣性を高めるための演出用の「装飾図柄」と称される図柄が、前記特別図柄の変動とシンクロした形で、前記表示部よりもサイズが大きい液晶等のディスプレー上で変動表示される。そして、特別図柄の変動が開始されると装飾図柄もこれに合わせて変動を開始し、特別図柄が特定態様(例えば「7」)で停止した場合、装飾図柄もこれに合わせて所定態様(例えば「777」)で停止することとなる。そして、遊技者は、装飾図柄が所定態様で停止したことにより、特別遊技へ移行が確定したことを認識する。 The most popular pachinko machines are currently displayed with a special symbol on the 7-segment display, etc., when the game ball enters the start opening. When the special symbol is in a specific mode (for example, “7”), a special gaming state that is more profitable for the player than the normal gaming state {a special winning opening (attacker) that is normally closed is a predetermined condition Is a model that is called “Digipachi” (conventional “first-class game machine”). Here, in order to reduce the burden of display control of special symbols that are directly linked to the interests of the player, in addition to the aforementioned “special symbols”, it is referred to as “decorative symbols” for the purpose of enhancing the fun of the game. The symbol to be displayed is variably displayed on a display such as a liquid crystal having a size larger than that of the display unit in a form synchronized with the variation of the special symbol. And when the change of the special symbol is started, the decorative symbol also starts to change accordingly, and when the special symbol stops in a specific mode (for example, “7”), the decorative symbol also changes to the predetermined mode (for example, “777”). Then, the player recognizes that the transition to the special game has been confirmed because the decorative symbol has stopped in a predetermined manner.
このような仕組みはこの種のぱちんこ遊技機で共通するので、他種との差別化を図るためには、前記図柄の変動態様を含めた演出全般に対し、いかに工夫を凝らし高い興趣性を付与するかということに注力されている。例えば、可動体役物演出はその内の一つであるが、可動体役物演出とは、図柄変動開始から図柄停止までの間に、液晶ディスプレー等の表示装置上で展開されている演出動画像と連動して可動体役物を動作させることで、演出効果を高めることを主な目的とした演出である。ここで、演出動画像の動作制御は主にサブ基板側で行っているため、演出動画像と可動体役物を連動させるためには、可動体役物の動作制御もサブ基板側で行うことが好適である。また、近年、可動体役物演出の興趣性を更に高めることを目的として、可動体の動作内容に多様化複雑化が求められる傾向があるため、メイン基板よりも処理能力の高いサブ基板側で、可動体役物の動作制御を行う構成が多く用いられている。 Such a mechanism is common to this type of pachinko machine, so in order to differentiate it from other types, how to devise the overall production including the variation of the above-mentioned design and give high interest The focus is on what to do. For example, the movable body accessory effect is one of them, and the movable object effect effect is an effect video developed on a display device such as a liquid crystal display during the period from the start of symbol variation to the symbol stop. It is an effect mainly intended to enhance the effect of the production by moving the movable object in conjunction with the image. Here, since the motion control of the effect moving image is mainly performed on the sub board side, in order to link the effect moving image and the movable object accessory, the operation control of the movable object accessory is also performed on the sub substrate side. Is preferred. Also, in recent years, there is a tendency to diversify and complicated the operation content of the movable body for the purpose of further enhancing the interest of moving body effect production, so on the sub-board side with higher processing capacity than the main board. In many cases, a configuration for controlling the operation of the movable body accessory is used.
ところで、ぱちんこ遊技機においては、従来より台を叩いたり揺らしたりする行為(ドツキ)や磁石等で入賞口に遊技球を誘導する行為といった不正行為が後を絶たない。このような不正行為を防止するため、警告音を発する或いは装飾用のランプの点灯・点滅等により不正行為が行われていることを周囲にアピールするようサブ基板側で制御する遊技機は多い。
しかしながら、装飾用のランプの点灯・点滅等による不正行為の報知は必ずしも有効でない場合がある。具体的には、ホール関係者にとっては、演出中の単なるランプ点灯や警告音であると捉えられる場合があり、不正行為実施者にとっても、不正行為の実施が外部に知られていないと認識されてしまう場合がある。このように、ホール関係者にも不正行為実施者のいずれにとっても分かり易い、従来とは全く異なる新たな報知手段を備えたぱちんこ遊技機が求められているという課題がある。 However, notification of fraudulent activity by lighting or blinking of a decorative lamp may not always be effective. Specifically, it may be perceived as a mere lamp lighting or warning sound during the performance for hall-related persons, and it is recognized that the conduct of the fraudulent act is not known to the outside even for the cheating person. May end up. Thus, there is a problem that there is a need for a pachinko gaming machine equipped with a new notification means that is completely different from the conventional one, which is easy to understand for both the hall personnel and the cheating practitioners.
本態様(1)に係る遊技機は、
遊技の進行を司る主遊技制御部(例えば、主制御装置1000)と演出の実行を司る副遊技制御部(例えば、演出表示制御手段2320)とを備えるぱちんこ遊技機であって、
遊技球が入球可能な主遊技用始動口(例えば、第1主遊技始動口2210、第2主遊技始動口2110)と、
主遊技用識別情報(例えば、主遊技図柄)の変動表示及び停止表示が実行される主遊技用識別情報表示部(例えば、第1主遊技図柄表示部2131、第2主遊技図柄表示部2231)と、
開状態と閉状態とを採り得る可変入賞口(例えば、第1大入賞口2120、第2大入賞口2220)と、
副遊技用識別情報(例えば、装飾図柄)の変動表示及び停止表示が実行される副遊技用識別情報表示部(例えば、装飾図柄表示領域2311)と、
変位可能な可変部材(例えば、可動体役物群232−110、可動体役物群232−210)と
を更に備えており、
主遊技制御部(例えば、主制御装置1000)は、
主遊技用始動口(例えば、第1主遊技始動口2210、第2主遊技始動口2110)への遊技球の入球を契機として、主遊技用乱数を取得する主遊技用乱数取得手段(例えば、第1主遊技乱数取得判定実行手段1121、第2主遊技乱数取得判定実行手段1122)と、
主遊技用乱数取得手段(例えば、第1主遊技乱数取得判定実行手段1121、第2主遊技乱数取得判定実行手段1122)が取得した乱数に基づき、主遊技用識別情報表示部(例えば、第1主遊技図柄表示部2131、第2主遊技図柄表示部2231)で表示される主遊技用識別情報(例えば、主遊技図柄)の変動態様及び停止識別情報を決定する主遊技用識別情報表示内容決定手段(例えば、第1主遊技内容決定手段1141、第2主遊技内容決定手段1142)と、
主遊技用識別情報表示内容決定手段(例えば、第1主遊技内容決定手段1141、第2主遊技内容決定手段1142)により決定された変動態様に従い、主遊技用識別情報表示部(例えば、第1主遊技図柄表示部2131、第2主遊技図柄表示部2231)にて主遊技用識別情報(例えば、主遊技図柄)を変動表示した後、主遊技用識別情報表示内容決定手段(例えば、第1主遊技内容決定手段1141、第2主遊技内容決定手段1142)により決定された停止識別情報を表示するよう制御する主遊技用識別情報表示制御手段(例えば、第1主遊技図柄制御手段1151、第2主遊技図柄制御手段1152)と、
主遊技用識別情報表示部(例えば、第1主遊技図柄表示部2131、第2主遊技図柄表示部2231)にて停止識別情報として所定態様が表示された場合、可変入賞口(例えば、第1大入賞口2120、第2大入賞口2220)を閉状態から開状態とする特別遊技に移行させるよう制御する特別遊技実行制御手段(例えば、特別遊技制御手段1170)と、
主遊技用乱数取得手段(例えば、第1主遊技乱数取得判定実行手段1121、第2主遊技乱数取得判定実行手段1122)が取得した主遊技用乱数に関する情報を副遊技制御部(例えば、演出表示制御手段2320)側に送信する主遊技側情報送信制御手段(例えば、情報送信制御手段1300)と
を備えており、
副遊技制御部(例えば、演出表示制御手段2320)は、
主遊技制御部(例えば、主制御装置1000)から送信された主遊技用乱数に関する情報に基づき、副遊技用識別情報表示部(例えば、装飾図柄表示領域2311)で表示される副遊技用識別情報(例えば、装飾図柄)の変動態様及び停止識別情報を決定する副遊技用識別情報表示内容決定手段(例えば、装図表示内容決定手段2322a)と、
主遊技制御部(例えば、主制御装置1000)側での主遊技用識別情報(例えば、主遊技図柄)の変動及び停止と同期させる形で、副遊技用識別情報表示内容決定手段(例えば、装図表示内容決定手段2322a)により決定された変動態様に基づき、副遊技用識別情報表示部(例えば、装飾図柄表示領域2311)にて副遊技用識別情報(例えば、装飾図柄)を変動表示した後、副遊技用識別情報表示内容決定手段(例えば、装図表示内容決定手段2322a)により決定された停止識別情報を確定的に表示するよう制御する副遊技用識別情報表示制御手段(例えば、装飾図柄表示制御手段2322)と、
副遊技用識別情報(例えば、装飾図柄)の変動表示期間中に可変部材(例えば、可動体役物群232−110、可動体役物群232−210)を変位させる場合、主遊技制御部(例えば、主制御装置1000)から送信された主遊技用乱数に関する情報に基づき、可変部材(例えば、可動体役物群232−110、可動体役物群232−210)の変位態様を決定する可変部材変位内容決定手段(例えば、演出動作可否・内容決定手段2325c―1)と、
可変部材変位内容決定手段(例えば、演出動作可否・内容決定手段2325c―1)により決定された変位態様に基づき、副遊技用識別情報(例えば、装飾図柄)の変動表示期間中に可変部材(例えば、可動体役物群232−110、可動体役物群232−210)を変位させる制御を実行可能な可変部材変位制御手段(例えば、可動体役物制御手段2325)と
を備えるぱちんこ遊技機であって、
主遊技制御部(例えば、主制御装置1000)は、
主遊技制御部(例えば、主制御装置1000)側における遊技の進行に係るエラーを検出する主遊技側エラー検出手段(振動エラー検出制御手段1600)と、
主遊技側エラー検出手段(振動エラー検出制御手段1600)により遊技の進行に係るエラーが検出された際には、当該エラーが検出された旨の情報を副遊技制御部(例えば、演出表示制御手段2320)側に送信する主遊技側エラー情報送信手段(情報送信制御手段1300)と
を備えており、
副遊技制御部(例えば、演出表示制御手段2320)は、
主遊技側エラー情報送信手段(情報送信制御手段1300)からエラーが検出された旨の情報を受信した場合には、少なくとも一の可変部材(例えば、可動体役物群232−110、可動体役物群232−210)についてはエラー報知対象可変部材とし、可変部材変位内容決定手段(例えば、演出動作可否・内容決定手段2325c―1)が決定した変位態様に基づいて変位動作が実行されていたとしてもエラー報知対象可変部材の当該変位動作を中止し、可変部材変位内容決定手段(例えば、演出動作可否・内容決定手段2325c―1)が副遊技用識別情報(例えば、装飾図柄)の変動表示時に決定し得る変位態様とは異なる特定変位態様でエラー報知対象可変部材を変位させる制御を実行可能な可変部材強制変位制御手段(可動体役物特殊可動実行制御手段2325h)と
を備えるぱちんこ遊技機である。
The gaming machine according to this aspect (1)
A pachinko gaming machine comprising a main game control unit (for example, the main control device 1000) that controls the progress of a game and a sub game control unit (for example, an effect display control means 2320) that controls the execution of an effect,
A main game start port (for example, a first main game start
Main game identification information display unit (for example, first main game
A variable winning opening (for example, a first grand prize opening 2120, a second big prize opening 2220) that can take an open state and a closed state;
A secondary game identification information display unit (for example, a decorative symbol display area 2311) in which variable display and stop display of the secondary game identification information (for example, a decorative symbol) is executed;
A movable member that can be displaced (for example, movable body accessory group 232-110, movable body accessory group 232-210),
The main game control unit (for example, the main control device 1000)
Main game random number acquisition means (for example, main game random number acquisition means) (for example, main game random number acquisition means) when a game ball enters the main game start port (for example, the first main
Based on the random numbers acquired by the main game random number acquisition means (for example, the first main game random number acquisition determination execution means 1121 and the second main game random number acquisition determination execution means 1122), the main game identification information display unit (for example, the first game random number acquisition determination execution means 1122). Main game identification information display content determination for determining a variation mode and stop identification information of main game identification information (for example, main game symbol) displayed on the main game
In accordance with the variation mode determined by the main game identification information display content determination means (for example, the first main game content determination means 1141 and the second main game content determination means 1142), After the main game identification information (for example, the main game symbol) is variably displayed on the main game
When a predetermined mode is displayed as stop identification information in the main game identification information display unit (for example, the first main game
Information related to the main game random number acquired by the main game random number acquisition means (for example, the first main game random number acquisition determination execution means 1121 and the second main game random number acquisition determination execution means 1122) is displayed in the sub game control unit (for example, effect display). Main game side information transmission control means (for example, information transmission control means 1300) for transmission to the control means 2320) side,
The secondary game control unit (for example, the effect display control means 2320)
The secondary game identification information displayed in the secondary game identification information display unit (for example, the decorative symbol display area 2311) based on the information related to the main game random number transmitted from the main game control unit (for example, the main control device 1000). Sub-game identification information display content determination means (for example, a drawing display content determination means 2322a) for determining a variation mode and stop identification information (for example, a decorative symbol);
Sub-game identification information display content determination means (for example, a device) is synchronized with the fluctuation and stop of the main game identification information (for example, the main game symbol) on the main game control unit (for example, the main control device 1000) side. After the secondary game identification information (for example, a decorative symbol) is variably displayed on the secondary game identification information display unit (for example, the decorative symbol display area 2311) based on the variation mode determined by the figure display content determining means 2322a). The secondary game identification information display content determining means (for example, the display display content determining means 2322a), the secondary game identification information display control means (for example, a decorative symbol) for controlling to display the stop identification information deterministically. Display control means 2322);
When displacing variable members (for example, the movable body accessory group 232-110 and the movable body accessory group 232-210) during the variable display period of the secondary game identification information (for example, decorative symbols), the main game control unit ( For example, based on the information relating to the main game random number transmitted from the main control device 1000), a variable for determining the displacement mode of the variable member (for example, the movable body accessory group 232-110, the movable body accessory group 232-210). Member displacement content determination means (for example, performance operation availability / content determination means 2325c-1);
Based on the displacement mode determined by the variable member displacement content determination means (for example, the performance operation availability / content determination means 2325c-1), the variable member (for example, the decorative symbol) is displayed during the variable display period of the secondary game identification information (for example, decoration symbol) And a variable member displacement control means (for example, a movable body accessory control means 2325) capable of executing control to displace the movable body accessory group 232-110 and movable body accessory group 232-210). There,
The main game control unit (for example, the main control device 1000)
Main game side error detection means (vibration error detection control means 1600) for detecting an error relating to the progress of the game on the main game control unit (for example, main control device 1000) side;
When an error relating to the progress of the game is detected by the main game side error detection means (vibration error detection control means 1600), information indicating that the error has been detected is sent to the sub game control unit (for example, effect display control means). 2320) main game side error information transmission means (information transmission control means 1300) for transmission to the side,
The secondary game control unit (for example, the effect display control means 2320)
When information indicating that an error has been detected is received from the main game side error information transmission means (information transmission control means 1300), at least one variable member (for example, the movable object combination group 232-110, the movable object combination) The object group 232-210) is a variable member subject to error notification, and the displacement operation has been executed based on the displacement mode determined by the variable member displacement content determination means (for example, the rendering operation availability / content determination means 2325c-1). However, the displacement operation of the variable member subject to error notification is stopped, and the variable member displacement content determination means (for example, the performance operation availability / content determination means 2325c-1) displays the variable display of the sub-game identification information (for example, decoration symbol). Variable member forced displacement control means (movable body role) capable of executing control for displacing the error notification target variable member in a specific displacement mode different from a displacement mode that can be determined sometimes Is a special movable execution control unit 2325H) and pachinko machine having a.
本態様(2)に係る遊技機は、
ぱちんこ遊技機は、
可変部材(例えば、可動体役物群232−110、可動体役物群232−210)を複数備えており、
副遊技制御部(例えば、演出表示制御手段2320)は、
エラー報知対象可変部材以外の可変部材であるエラー報知対象外可変部材に関しては、エラー報知対象可変部材が前記特定変位態様で変位動作を実行している状況下では、エラー報知対象外可変部材が変位動作を実行している場合には当該変位動作を中止し、エラー報知対象外可変部材が変位動作を実行していない場合には以後の変位動作の実行を禁止する、本態様(1)のぱちんこ遊技機である。
The gaming machine according to this aspect (2)
Pachinko machines
A plurality of variable members (for example, movable body accessory group 232-110, movable body accessory group 232-210),
The secondary game control unit (for example, the effect display control means 2320)
With regard to a variable member other than the error notification target variable member that is a variable member other than the error notification target variable member, the error notification target variable member is displaced under a situation in which the error notification target variable member performs a displacement operation in the specific displacement mode. When the operation is being executed, the displacement operation is stopped. When the variable member not subject to error notification is not executing the displacement operation, the subsequent displacement operation is prohibited. It is a gaming machine.
本態様(3)に係る遊技機は、
エラー報知対象可変部材は、副遊技用識別情報表示部(例えば、装飾図柄表示領域2311)の一部又は全てを遮蔽する遮蔽位置に移動可能であり、前記特定変位態様では前記遮蔽位置に移動する、本態様(1)又は(2)のぱちんこ遊技機である。
The gaming machine according to this aspect (3)
The error notification target variable member can be moved to a shielding position that shields part or all of the auxiliary game identification information display unit (for example, the decorative symbol display area 2311), and moves to the shielding position in the specific displacement mode. The pachinko gaming machine according to the aspect (1) or (2).
本態様に係るぱちんこ遊技機によれば、主遊技側エラー情報送信手段からエラーが検出された旨の情報を副遊技制御部側で受信した場合には、副遊技制御部側で管理する可変部材を用い、副遊技用識別情報の変動表示時とは異なった特定変位態様で変位させる制御を実行可能に構成されているので、ホール関係者にも不正行為実施者のいずれにとっても分かり易い、従来とは全く異なる新たな報知手段を備えたぱちんこ遊技機を提供することができるという効果を奏する。 According to the pachinko gaming machine according to the present aspect, when the information indicating that an error has been detected from the main game side error information transmission means is received on the sub game control unit side, the variable member managed on the sub game control unit side Since it is configured so that it can be controlled to be displaced in a specific displacement mode different from the time when the identification information for the secondary game is displayed, it is easy to understand for both the hall personnel and the cheating agent. It is possible to provide a pachinko gaming machine equipped with a new notification means that is completely different from the above.
以下、図面を参照して実施形態について説明する。尚、以下の実施形態は、従来の第1種ぱちんこ遊技機を二つ混在させたような機種であるが、これに限定されず、他の遊技機{例えば、従来の第2種や第3種、一般電役、普通機、複合機(例えば、従来の第1種の機能を二つ有する遊技機や、従来の第1種の機能と従来の第2種の機能を一つ有する遊技機)といったぱちんこ遊技機の他に、スロットマシン、コインゲーム機等のアーケードマシン、各種ゲーム機}に応用された場合も本形態の範囲内である。また、あくまで一例であり、各手段が存在する場所や機能等、各種処理に関しての各ステップの順序、フラグのオン・オフのタイミング、各ステップの処理を担う手段名等に関し、以下の態様に限定されるものではない。また、上記した実施形態や変更例は、特定のものに対して適用されると限定的に解すべきでなく、どのような組み合わせであってもよい。例えば、ある実施形態についての変更例は、別の実施形態の変更例であると理解すべきであり、また、ある変更例と別の変更例が独立して記載されていたとしても、当該ある変更例と当該別の変更例を組み合わせたものも記載されていると理解すべきである。
Hereinafter, embodiments will be described with reference to the drawings. In addition, although the following embodiment is a model in which two
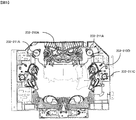
まず、図1を参照しながら、本実施形態に係るぱちんこ遊技機の前面側の基本構造を説明する。ぱちんこ遊技機は、主に遊技機枠と遊技盤で構成される。以下、これらを順に説明する。 First, the basic structure of the front side of the pachinko gaming machine according to the present embodiment will be described with reference to FIG. Pachinko gaming machines mainly consist of a gaming machine frame and a gaming board. Hereinafter, these will be described in order.
はじめに、ぱちんこ遊技機の遊技機枠は、外枠102、前枠104、透明板106、扉108、上球皿110、下球皿112及び発射ハンドル116を含む。まず、外枠102は、ぱちんこ遊技機を設置すべき位置に固定するための枠体である。前枠104は、外枠102の開口部分に整合する枠体であり、図示しないヒンジ機構を介して外枠102に開閉可能に取り付けられる。前枠104は、遊技球を発射する機構、遊技盤を着脱可能に収容させるための機構、遊技球を誘導又は回収するための機構等を含む。透明板106は、ガラス等により形成され、扉108により支持される。扉108は、図示しないヒンジ機構を介して前枠104に開閉可能に取り付けられる。上球皿110は、遊技球の貯留、発射レールへの遊技球の送り出し、下球皿112への遊技球の抜き取り等の機構を有する。下球皿112は、遊技球の貯留、抜き取り等の機構を有する。また、上球皿110と下球皿112の間にはスピーカ114が設けられており、遊技状態等に応じた効果音が出力される。
First, the gaming machine frame of the pachinko gaming machine includes an
次に、遊技盤は、外レール122と内レール124とにより区画された遊技領域120が形成されている。そして、当該遊技領域120には、複数の遊技釘及び風車等の機構や各種一般入賞口の他、第1主遊技始動口2210、第2主遊技始動口2110、補助遊技入球口2410、第1大入賞口2120、第2大入賞口2220、第1主遊技図柄表示装置2130、第2主遊技図柄表示装置2230、演出表示装置2140、補助遊技図柄表示装置2420、センター飾り192及びアウト口142が設置されている。以下、各要素を順番に詳述する。
Next, the
まず、第1主遊技始動口2210は、第1主遊技に対応する始動入賞口として設置されている。具体的構成としては、第1主遊技始動口2210は、第1入球検出装置2211を備える。ここで、第1入球検出装置2211は、第1主遊技始動口2210への遊技球の入球を検出するセンサであり、入球時にその入球を示す第1主遊技始動口入球情報を生成する。
First, the first main
次に、第2主遊技始動口2110は、第2主遊技に対応する始動入賞口として設置されている。具体的構成としては、第2主遊技始動口2110は、第2入球検出装置2111と、電動役物2112と、備える。ここで、第2入球検出装置2111は、第2主遊技始動口2110への遊技球の入球を検出するセンサであり、入球時にその入球を示す第2主遊技始動口入球情報を生成する。次に、電動役物2112は、第2主遊技始動口2110に遊技球が入球不能な閉鎖状態{平板状に形成された球受け部材(以下、球受け部材と称する)が遊技領域120から引っ込んだ状態}と遊技球が入球可能な開放状態(球受け部材が遊技領域120に突き出た状態)に可変する。ここで、本実施形態における電動役物2112は、球受け部が前後にスライドする形態の電動役物(所謂、ベロ電)を採用しており、開放状態にあるときには遊技領域に突出した球受け部材により遊技球を受け止めて、当該遊技球を第2入球検出装置2111(遊技盤の内部に配置)に誘導するよう構成されている。尚、本実施形態では、遊技領域120の右側(遊技領域中央を基準)を流下する遊技球が、第2主遊技始動口2110に誘導され易いよう構成されており、他方遊技領域120の左側(遊技領域中央を基準)を流下する遊技球は、第2主遊技始動口2110に誘導され難いよう構成されている。尚、「誘導され易い」及び「誘導され難い」は、例えば、遊技球を右側及び左側にそれぞれ10000球発射した際の、入球数の大小で決定するものとする。また、本実施形態では、電動役物として、短時間での開放動作では遊技球の受け入れが困難となるように球受け部材が前後にスライドする形態の電動役物を採用したが、これには限定されず、遊技球が入球困難又は入球不能な閉鎖状態と、閉鎖状態よりも遊技球が入球容易な開放状態とを採り得る、所謂チューリップ型の電動役物を採用してもよい。
Next, the second main
次に、補助遊技入球口2410は、入球検出装置2411を備える。ここで、入球検出装置2411は、補助遊技入球口2410への遊技球の入球を検出するセンサであり、入球時にその入球を示す補助遊技入球口入球情報を生成する。尚、補助遊技入球口2410への遊技球の入球は、第2主遊技始動口2110の電動役物2112を変位させるための抽選の契機となる。
Next, the
次に、第1大入賞口2120(第2大入賞口2220)は、第1主遊技図柄(第1特別図柄)又は第2主遊技図柄(第2特別図柄)が所定態様で停止した場合、「大当り」として開状態となる、横長方形状を成しアウト口142の右上方に位置した入賞口である。具体的構成としては、第1大入賞口2120(第2大入賞口2220)は、遊技球の入球を検出するための第1入賞検出装置2121(第2入賞検出装置2221)と、第1電動役物2122(第2電動役物2222)と、を備える。ここで、第1入賞検出装置2121(第2入賞検出装置2221)は、第1大入賞口2120(第2大入賞口2220)への遊技球の入球を検出するセンサであり、入球時にその入球を示す第1大入賞口入球情報(第2大入賞口入球情報)を生成する。第1電動役物2122(第2電動役物2222)は、第1大入賞口2120(第2大入賞口2220)に遊技球が入賞不能又は入賞困難な通常状態と遊技球が入賞し易い開放状態に第1大入賞口2120(第2大入賞口2220)を可変させる。尚、本実施形態では、大入賞口は二つ存在するが、第1主遊技図柄に基づく特別遊技と第2主遊技図柄に基づく特別遊技を一つの大入賞口で実行するよう構成してもよい。
Next, when the first main game symbol (first special symbol) or the second main game symbol (second special symbol) is stopped in a predetermined manner, the first grand prize port 2120 (second grand prize port 2220) This is a winning opening that is in the open state as a “big hit” and has a horizontal rectangular shape and is located at the upper right of the
次に、第1主遊技図柄表示装置2130(第2主遊技図柄表示装置2230)は、第1主遊技(第2主遊技)に対応する第1主遊技図柄(第2主遊技図柄)の変動表示及び停止表示を行う。具体的構成としては、第1主遊技図柄表示装置2130(第2主遊技図柄表示装置2230)は、第1主遊技図柄表示部2131(第2主遊技図柄表示部2231)と、第1主遊技図柄保留表示部2132(第2主遊技図柄保留表示部2232)とを備える。ここで、第1主遊技図柄保留表示部2132(第2主遊技図柄保留表示部2232)は、4個のランプから構成され、当該ランプの点灯個数が、第1主遊技(第2主遊技)に係る乱数の保留数(実行されていない主遊技図柄の変動数)に相当する。尚、第1主遊技図柄表示装置2130(第2主遊技図柄表示装置2230)は、例えば7セグメントLEDで構成され、第1主遊技図柄(第2主遊技図柄)は、「0」〜「9」の10種類の数字及びハズレの「−」で表示される。 Next, the first main game symbol display device 2130 (second main game symbol display device 2230) changes the first main game symbol (second main game symbol) corresponding to the first main game (second main game). Display and stop display. Specifically, the first main game symbol display device 2130 (second main game symbol display device 2230) includes a first main game symbol display unit 2131 (second main game symbol display unit 2231) and a first main game. And a symbol hold display unit 2132 (second main game symbol hold display unit 2232). Here, the first main game symbol hold display unit 2132 (second main game symbol hold display unit 2232) is composed of four lamps, and the number of lighting of the lamps is the first main game (second main game). This corresponds to the number of random numbers held (the number of main game symbols that have not been executed). The first main game symbol display device 2130 (second main game symbol display device 2230) is composed of, for example, a 7-segment LED, and the first main game symbol (second main game symbol) is “0” to “9”. ”And 10 types of numbers and“ − ”of the loss.
尚、第1主遊技図柄(第2主遊技図柄)は必ずしも演出的な役割を持つ必要が無いため、本実施形態では、第1主遊技図柄表示装置2130(第2主遊技図柄表示装置2230)の大きさは、目立たない程度に設定されている。しかしながら、第1主遊技図柄(第2主遊技図柄)自体に演出的な役割を持たせて第1装飾図柄(第2装飾図柄)を表示させないような手法を採用する場合には、後述する演出表示装置2310のような液晶ディスプレーに、第1主遊技図柄(第2主遊技図柄)を表示させるように構成してもよい。
Since the first main game symbol (second main game symbol) does not necessarily have an effect role, in this embodiment, the first main game symbol display device 2130 (second main game symbol display device 2230). The size of is set to be inconspicuous. However, in the case of adopting a technique that does not display the first decorative symbol (second decorative symbol) by giving the first main gaming symbol (second main gaming symbol) itself an effect role, an effect described later You may comprise so that a 1st main game symbol (2nd main game symbol) may be displayed on a liquid crystal display like the
次に、演出表示装置2140は、主として、第1主遊技図柄・第2主遊技図柄と連動して変動・停止する装飾図柄を含む演出画像の変動表示及び停止表示が行われると共に、装飾図柄の保留球表示が行われる。具体的には、後述する演出表示制御手段2320の表示制御により、画面上に、装飾図柄の変動表示及び停止表示が実行される装飾図柄表示領域2311(不図示)と、第1主遊技図柄に対応した装飾図柄の保留表示が実行される第1保留表示部2312a及び第2主遊技図柄に対応した装飾図柄の保留表示が実行される第2保留表示部2312b(不図示)と、が形成される。尚、演出表示装置2140は、本実施形態では液晶ディスプレーで構成されているが、機械式のドラムやLED等の他の表示手段で構成されていてもよい。
Next, the
次に、補助遊技図柄表示装置2420は、補助遊技図柄(普通図柄)の変動表示及び停止表示が行われる。具体的構成としては、補助遊技図柄表示装置2420は、補助遊技図柄表示部2421と、補助遊技図柄保留表示部2422とを備える。ここで、補助遊技図柄保留表示部2422は、4個のランプから構成され、当該ランプの点灯個数が、補助遊技図柄変動の保留数(実行されていない補助遊技図柄変動の数)に相当する。
Next, the auxiliary game
最後に、センター飾り192は、演出表示装置2140の周囲に設置され、遊技球の流路、演出表示装置2140の保護、装飾等の機能を有する。また、遊技効果ランプ190は、遊技領域120に設けられ、点滅等することで演出の役割を果たす。
Finally, the
次に、図2を参照しながら、ぱちんこ遊技機の背面側における基本構造を説明する。ぱちんこ遊技機は、ぱちんこ遊技機の全体動作を制御し、特に第1主遊技始動口2210(第2主遊技始動口2110)へ入球したときの抽選等、遊技動作全般の制御(即ち、遊技者の利益と直接関係する制御)を行う主制御装置(主制御基板)1000と、遊技内容に興趣性を付与する演出表示装置2140上での各種演出に係る表示制御を行う演出表示制御手段(サブメイン制御基板)2320と、遊技の興趣性を高める演出の表示処理が実行される演出表示装置(サブサブ制御基板)2310と、賞球タンク212、賞球レール214及び各入賞口への入賞に応じて賞球タンク212から供給される遊技球を上球皿110へ払い出す払出ユニット216等を備える賞球払出機構(セット基盤)210と、払出ユニット216による払出動作を制御する賞球払出制御装置(賞球払出制御基板)3000と、上球皿110の遊技球(貯留球)を遊技領域120へ1球ずつ発射する発射装置232と、発射装置232の発射動作を制御する発射制御基板230と、ぱちんこ遊技機の各部へ電力を供給する電源ユニット290と、ぱちんこ遊技機の電源をオンオフするスイッチである電源スイッチ292等が、前枠104裏面(遊技側と反対側)に設けられている。 Next, the basic structure on the back side of the pachinko gaming machine will be described with reference to FIG. The pachinko gaming machine controls the overall operation of the pachinko gaming machine, and in particular controls the overall game operation such as lottery when entering the first main game starting port 2210 (second main game starting port 2110) (ie, game Main control device (main control board) 1000 that performs control directly related to the profits of the player, and effect display control means that performs display control related to various effects on the effect display device 2140 that provides interest to the game content ( Sub-main control board) 2320, presentation display device (sub-sub control board) 2310 for performing display processing for enhancing the fun of the game, prize ball tank 212, prize ball rail 214, and winning prizes In response, a prize ball payout mechanism (set base) 210 including a payout unit 216 for paying out game balls supplied from the prize ball tank 212 to the upper ball tray 110, and payout by the payout unit 216 A prize ball payout control device (prize ball payout control board) 3000 for controlling the work, a launch device 232 for launching the game balls (reserved balls) of the upper ball tray 110 to the game area 120 one by one, and launch of the launch device 232 A launch control board 230 that controls the operation, a power supply unit 290 that supplies power to each part of the pachinko gaming machine, a power switch 292 that is a switch for turning on and off the pachinko gaming machine, etc. On the opposite side).
《可動体役物構成》
次に、図3を参照しながら、本実施形態における可動体役物ユニットの基本構造を説明する。はじめに、本実施形態では、図柄変動開始から図柄停止までの間に、演出表示装置2310上で展開されている演出動画像と連動して動作する可動体役物を複数種類備えている。また、夫々の可動体役物は、合成樹脂やバネ等の部材により構成された可動部材、可動部材の駆動源となるステッピングモータやソレノイド、可動部材の位置を検出するためのセンサ等をユニット化し遊技機と着脱可能に構成されている。具体的には、本実施形態では、遊技盤表ユニット232−100と遊技盤裏ユニット232−200とを有しており、遊技領域120を構成する盤面部材である遊技盤232−50に対して着脱可能に構成されている。ここで、遊技盤表ユニット232−100は、遊技盤232−50に対して表側(遊技機正面側)から着脱可能に構成されている。他方、遊技盤裏ユニット232−200は、遊技盤232−50に対して裏側(遊技機背面側)から着脱可能に構成されている。以下、夫々のユニットについて詳述する。
《Movable body composition》
Next, the basic structure of the movable object accessory unit in the present embodiment will be described with reference to FIG. First, in the present embodiment, a plurality of types of movable body accessories that operate in conjunction with the effect moving image developed on the
まず、遊技盤表ユニット232−100は、複数種類の可動体役物群(表ユニット側)232−100を有している。ここで、本実施形態では、可動体役物群(表ユニット側)232−100は、遊技機正面側からみて左側(遊技領域中央を基準)に設置された可動体役物232−110B(以下、可動体役物Bと呼ぶ)と遊技機正面側からみて右側(遊技領域中央を基準)に設置された可動体役物232−110D(以下、可動体役物Dと呼ぶ)とを有している。尚、図示しないが、可動体役物B(可動体役物D)における可動部材は、夫々が1つのソレノイド{以下、ソレノイドB(D)と呼ぶ}と連結しており、後述するように、サブメイン制御基板2320からの励磁パルス信号に基づき当該ソレノイドB(D)が励磁されることによって駆動するよう構成されている。
First, the game board front unit 232-100 has a plurality of types of movable body accessory groups (front unit side) 232-100. Here, in the present embodiment, the movable body accessory group (front unit side) 232-100 is a movable body accessory 232-110B (hereinafter referred to as the center of the game area) installed on the left side when viewed from the front side of the gaming machine. And a movable body accessory 232-110D (hereinafter referred to as a movable body accessory D) installed on the right side (based on the center of the game area) as viewed from the front side of the gaming machine. ing. Although not shown, each of the movable members in the movable body accessory B (movable body accessory D) is connected to one solenoid {hereinafter referred to as solenoid B (D)}. The solenoid B (D) is driven by being excited based on the excitation pulse signal from the sub
次に、遊技盤裏ユニット232−200は、複数種類の可動体役物群(裏ユニット側)232−210を有している。ここで、本実施形態では、可動体役物群(裏ユニット側)232−210は、遊技機正面側からみて上側(遊技領域中央を基準)に設置された可動体役物232−210A(以下、可動体役物Aと呼ぶ)と遊技機正面側からみて右側(遊技領域中央を基準)に設置された可動体役物232−210C(以下、可動体役物Cと呼ぶ)とを有している。尚、可動体役物Aにおける可動部材は、2つのモータ232−211A(以下、モータAと呼ぶ)と連結しており、後述するように、サブメイン制御基板2320からの励磁パルス信号に基づき当該モータAが励磁されることによって駆動するよう構成されている。また、可動体役物Cにおける可動部材は、1つのモータ232−211C(以下、モータCと呼ぶ)と連結しており、後述するように、サブメイン制御基板2320からの励磁パルス信号に基づき当該モータCが励磁されることによって駆動するよう構成されている。
Next, the game board back unit 232-200 has a plurality of types of movable body accessory groups (back unit side) 232-210. Here, in this embodiment, the movable body accessory group (rear unit side) 232-210 is a movable body accessory 232-210 </ b> A (hereinafter referred to as the center of the game area) as viewed from the front side of the gaming machine. And a movable body accessory 232-210C (hereinafter referred to as a movable body accessory C) installed on the right side (referenced to the center of the game area) from the front side of the gaming machine. ing. The movable member in the movable body accessory A is connected to two motors 232-211A (hereinafter, referred to as motor A), and based on an excitation pulse signal from the
尚、同図は分解斜視図であるため、可動体役物A〜Dが何れのユニットに設置されているのかは判別容易であるが、これらのユニットを遊技機に取付けた場合には、遊技機外観からは判別困難となるよう構成されている。例えば、遊技盤裏ユニット232−200を遊技機に取り付けた場合、可動体役物Aは図1において、演出表示装置2140よりも遊技者側に位置するため、遊技盤表ユニット232−100に設置されているように見えるのである。また、後述するように、可動体役物Aと可動体役物Bとは連動動作するよう構成されているため、可動体役物Aと可動体役物Bとが同一のユニットに設置されていると誤認することで、可動体役物Aが遊技盤表ユニット232−100に設置されているよう捉えられるのである。
Since this figure is an exploded perspective view, it is easy to determine in which unit the movable body accessories A to D are installed. However, when these units are attached to a gaming machine, It is configured to be difficult to distinguish from the appearance of the machine. For example, when the game board back unit 232-200 is attached to the game machine, the movable body accessory A is located on the player side with respect to the
次に、図4を参照しながら、本実施形態における可動体役物B及び可動体役物Dの動作態様について説明する。可動体役物B(可動体役物D)における可動部材は、ソレノイドB(D)が励磁されることで遊技領域中央側へ移動し、ソレノイドB(D)が消磁されることでもと(基準)の位置に戻るよう動作する。尚、可動体役物B及び可動体役物Dは、夫々を独立して動作制御することが可能であるよう構成されている。 Next, operation modes of the movable body accessory B and the movable body accessory D in the present embodiment will be described with reference to FIG. The movable member in the movable body accessory B (movable body accessory D) moves to the center of the game area when the solenoid B (D) is excited, and the solenoid B (D) is demagnetized (reference). ) To return to the position. Note that the movable body accessory B and the movable body accessory D are configured to be capable of independently controlling their operations.
次に、図5を参照しながら、本実施形態における可動体役物A及び可動体役物Cの動作態様について説明する。まず、可動体役物Aにおける可動部材は、モータAが第一の回転方向(例えば、同図において、可動体役物Aの左側に位置するモータが時計回り、可動体役物Aの右側に位置するモータが反時計回りに回転する方向)へ回転するよう励磁されることで遊技領域中央側へ(装飾図柄が基準位置に表示された際に、当該表示内容の一部或いは全部が隠れるように)移動する。他方、モータAが第二の回転方向(例えば、同図において、可動体役物Aの左側に位置するモータが反時計回り、可動体役物Aの右側に位置するモータが時計回りに回転する方向)へ回転するよう励磁されることでもと(基準)の位置に戻るよう動作する。次に、可動体役物Cにおける可動部材は、モータCが第一の回転方向(例えば、同図において、モータCが時計回りに回転する方向)へ回転するよう励磁されることで遊技領域中央側へ移動する。他方、モータCが第二の回転方向(例えば、同図において、モータCが反時計回りに回転する方向)へ回転するよう励磁されることでもと(基準)の位置に戻るよう動作する。ここで、本実施形態では、図示するように、可動体役物Aの可動領域と可動体役物Cの可動領域とが重複するよう構成されている。即ち、可動体役物A及び可動体役物Cが存在する位置によっては、両者が干渉してしまうこととなる。 Next, with reference to FIG. 5, operation modes of the movable body accessory A and the movable body accessory C in the present embodiment will be described. First, the movable member in the movable body accessory A has a motor A in the first rotation direction (for example, the motor located on the left side of the movable body accessory A in the figure rotates clockwise, and on the right side of the movable body accessory A). Energized to rotate in the counterclockwise direction of the motor that is located, to the center of the game area (when the decorative symbol is displayed at the reference position, part or all of the display content is hidden) To). On the other hand, the motor A is rotated in the second rotation direction (for example, in FIG. 2, the motor located on the left side of the movable accessory A rotates counterclockwise, and the motor located on the right of the movable accessory A rotates clockwise. Even when excited to rotate in the (direction) direction, it returns to the original (reference) position. Next, the movable member in the movable body accessory C is energized so that the motor C rotates in the first rotation direction (for example, the direction in which the motor C rotates in the clockwise direction in the figure). Move to the side. On the other hand, when the motor C is excited to rotate in the second rotation direction (for example, the direction in which the motor C rotates counterclockwise in the figure), the motor C returns to the original (reference) position. Here, in this embodiment, as shown in the figure, the movable area of the movable body accessory A and the movable area of the movable body accessory C are configured to overlap. In other words, depending on the position where the movable body accessory A and the movable body accessory C exist, they interfere with each other.
《電気的構成》
次に、図6のブロック図を参照しながら、本実施形態に係るパチンコ遊技機の電気的な概略構成を説明する。はじめに、本実施形態に係るパチンコ遊技機は、前述したように、遊技の進行を制御する主制御基板1000と、主制御基板1000からの情報(信号、コマンド等)に基づいて遊技球の払出を制御する賞球払出制御基板3000と、装飾図柄の変動・停止等の演出表示装置2140上での各種演出、スピーカ114からの音響、遊技効果ランプ190の点灯等の演出全般やエラー報知を制御するサブメイン制御基板2320と、演出表示装置2140上での装飾図柄の変動表示・停止表示及び保留表示や予告表示等の表示処理を実行するサブサブ制御基板2310と、を備える。ここで、主制御基板1000、賞球払出制御基板3000、サブメイン制御基板2320及びサブサブ制御基板2310には、様々な演算処理を行うCPU、CPUの演算処理を規定したプログラムを予め記憶するROM、CPUが取り扱うデータ(遊技中に発生する各種データやROMから読み出されたコンピュータプログラム等)を一時的に記憶するRAMが搭載されている。また、各基板は電源供給ユニットと接続しており、電源供給ユニットから電力を供給されることで電気的動作が可能となっている。
<Electrical configuration>
Next, an electrical schematic configuration of the pachinko gaming machine according to the present embodiment will be described with reference to the block diagram of FIG. First, as described above, the pachinko gaming machine according to the present embodiment pays out a game ball based on the
まず、主制御基板1000は、賞球払出制御基板3000と、サブメイン制御基板2320と、第1入球検出装置2211や第2入球検出装置2111等の入賞口センサSとに接続している。また、その他、外部接続端子(不図示)を介してホールコンピュータ等とも接続しており、主制御基板1000から外部の装置に対して遊技関連情報を出力できるよう構成されている。
First, the
次に、賞球払出制御基板3000は、遊技球の払出を実行する賞球払出機構210と、遊技者によって操作可能な装置であって遊技球の貸出要求を受付け賞球払出制御基板3000に伝達する遊技球貸出装置100とに接続している。また、サブサブ制御基板2310は、演出表示装置2140と接続している。尚、本実施形態では、遊技球貸出装置100を別体として遊技機に隣接する形態を採用しているが、遊技機と一体としてもよく、その場合には、賞球払出制御基板3000により貸出制御及び電子マネー等貸出用の記録媒体の管理制御等を統括して行っても良い。
Next, the prize ball
次に、サブメイン制御基板2320は、サブサブ制御基板2310と、遊技盤表ユニット232−100及び遊技盤裏ユニット232−200の夫々と、可動体役物に係るエラーを報知可能な可動体役物エラー報知手段(表ユニット対応)232−31及び可動体役物エラー報知手段(裏ユニット対応)232−32とに接続している。また、その他、スピーカ114・遊技効果ランプ190等とも接続している。ここで、本実施形態では、可動体役物エラー報知手段(表ユニット対応)232−31及び可動体役物エラー報知手段(裏ユニット対応)232−32は複数のLEDによって構成されている。そして、後述するように、可動体役物A〜可動体役物Dにおける異常動作を検出した場合には、何れのユニットの何れの位置に設置されている可動体役物に係る異常動作であるのかを判別可能に報知(例えば、LEDの点灯箇所や点灯箇所の組合せで報知)できるよう構成されている。
Next, the
次に、サブメイン制御基板2320と遊技盤表ユニット232−100との接続においては、可動体役物群(表ユニット側)232−110と当該可動体役物群の存在位置を検出可能な位置センサ群(表ユニット側)232−120とに接続している。また、サブメイン制御基板2320と遊技盤裏ユニット232−200との接続においては、可動体役物群(裏ユニット側)232−210と当該可動体役物群の存在位置を検出可能な位置センサ群(裏ユニット側)232−220とに接続している。以下、夫々のユニット内部について詳述する。
Next, in the connection between the
次に、図7の上段におけるブロック図を参照しながら、本実施形態に係る遊技盤ユニットの内部構成を説明する。まず、可動体役物群(表ユニット側)232−110におけるソレノイドB(D)及び可動体役物群(裏ユニット側)232−210におけるモータA(C)はサブメイン制御基板2320と接続している。また、位置センサ群(表ユニット側)232−120における位置センサ232−120B(以下、位置センサBと呼ぶ)及び位置センサ232−120D(以下、位置センサDと呼ぶ)と位置センサ群(裏ユニット側)232−220における位置センサ232−220A(以下、位置センサAと呼ぶ)及び位置センサ232−220C(以下、位置センサCと呼ぶ)はサブメイン制御基板2320と接続している。ここで、サブメイン制御基板2320側から送信される励磁パルス信号に基づきソレノイドB(D)及びモータA(C)が励磁され、可動体役物B(D)及び可動体役物A(C)が駆動する。また、可動体役物B(D)及び可動体役物A(C)の存在位置を位置センサB(D)及び位置センサA(C)によって検出し、当該検出した位置情報をサブメイン制御基板2320へ送信する。このように構成することで、可動体役物A〜Dの夫々をサブメイン制御基板2320側から制御することが可能となる。例えば、位置センサAとして、可動体役物Aの初期位置に位置センサαを設置し、可動体役物Aの最大駆動位置に位置センサβを設置するよう構成し、夫々の位置センサにて可動体役物Aを検出したか否かに係る情報をサブメイン制御基板2320側へ送信することで、可動体役物Aの存在位置を検出することが可能となるのである。更に、本実施形態では、サブメイン制御基板2320側での制御誤動作に起因して、ソレノイドB(D)及びモータA(C)が焼損することがないよう、励磁制御部における構造に特徴を有している。以下、サブメイン制御基板2320における励磁制御部について詳述する。
Next, the internal configuration of the game board unit according to the present embodiment will be described with reference to the block diagram in the upper part of FIG. First, the solenoid B (D) in the movable body accessory group (front unit side) 232-110 and the motor A (C) in the movable body accessory group (back unit side) 232-210 are connected to the
次に、図7の中段におけるブロック図を参照しながら、本実施形態に係るサブメイン制御基板2320における励磁制御部の電気的な概略構成を説明する。まず、サブメインCPU232−300は、RAM232−400と、I/Oポート232−500とに接続しており、I/Oポート232−500を介して、励磁パルス信号と制御信号とを別々に出力するよう構成されている。次に、I/Oポート232−500はドライバ232−600と接続しており、I/Oポート232−500から出力された励磁パルス信号と制御信号とは、論理回路(本例では、正論理のアンド回路であるが、これには限定されない)を介して一の信号へと変換された上で、ドライバ232−600へと入力される。そして、ドライバ232−600はソレノイドB(D)及びモータA(C)の夫々と接続しており、変換された一の信号である励磁信号に基づきソレノイドB(D)及びモータA(C)に対して励磁電力を供給できるよう構成されている。ここで、同図の下段は、励磁パルス信号と制御信号とが論理回路を介して一の信号へと変換される様子の一例である。同図に示されるように、励磁パルス信号は、H(ハイ)レベルとL(ロウ)レベルを繰り返す矩形の信号であり、制御信号は、HレベルとLレベルの何れかを所定の期間に亘って保持し続ける信号である。そして、制御信号がHレベルにあるときには、励磁パルス信号の矩形信号は同形のまま変換され励磁信号となる。他方、制御信号がLレベルにあるときには、励磁パルス信号の矩形信号は全てLレベルの信号へと変換されて励磁信号となる(即ち、非励磁状態となる)のである。また、本実施形態では、当該変換された信号である励磁信号(又は励磁電力値でもよい)をI/Oポート232−500を介してサブメインCPU232−300に入力可能に構成されており、サブメインCPU232−300は当該入力された励磁信号(又は励磁電力値)をRAM232−400に記憶可能に構成されている。そして、RAM232−400内には、所定期間分の励磁信号(又は励磁電力値)を蓄積できるようバッファ領域が確保されているため、所定期間内においてソレノイドB(D)及びモータA(C)に供給された励磁電力値が算出可能となるのである。尚、制御信号の出力制御、励磁電力値の利用方法等については後述する。
Next, an electrical schematic configuration of the excitation control unit in the
次に、図8のブロック図を参照しながら、本実施形態に係るぱちんこ遊技機の各種機能について説明する。はじめに、主制御装置1000は、遊技に係る遊技周辺機器2000と、主制御装置1000からの払出指示に基づき所定数の賞球の払出制御を行う賞球払出制御装置3000と情報伝達可能に接続されている。尚、以下で主制御装置1000に含まれるとする各手段を周辺機器(例えば、遊技周辺機器2000)に搭載される形で構成してもよい。例えば、本実施形態では、主制御装置1000に払出制御機能を持たせているが、例えば賞球払出制御装置3000内に持たせるように構成してもよい。同様に、周辺機器(例えば、遊技周辺機器2000)に含まれるとする各手段を主制御装置1000に搭載される形で構成してもよい。以下、上記各手段(装置)の詳細を説明する。
Next, various functions of the pachinko gaming machine according to the present embodiment will be described with reference to the block diagram of FIG. First, the
まず、主制御装置1000は、第1主遊技・第2主遊技・特別遊技・補助遊技・一般遊技に関する主たる制御を司る遊技制御手段1100と、遊技周辺機器2000側に各種遊技情報{例えば、停止図柄情報、停止図柄の属性情報(例えば、確率変動大当り、突然確率変動大当り、突然時間短縮変動大当り、小当り、ハズレ)、変動態様に関する情報(例えば、変動時間)、特別遊技の開始信号・状態情報・終了信号、保留情報、保留先読み情報等}を送信するための情報送信制御手段1300と、各種入賞口への遊技球の入賞に基づき所定の賞球の払出を行うように賞球払出制御装置3000を制御する賞球払出決定手段1400と、遊技機に対して印加された振動を検出すると共に、当該振動に係るエラー制御を司る振動エラー検出制御手段1600と、を有している。
First, the
ここで、遊技制御手段1100は、各入球口(始動口等)への遊技球の流入を判定するための入球判定手段1110と、各乱数の取得可否を判定し、当該判定結果に基づき当該各乱数を取得するための乱数取得判定実行手段1120と、変動表示中における各始動口への入球を保留球として上限個数以内で一時記憶するための保留制御手段1130と、後述する遊技内容決定乱数(当選乱数)に基づき当りであるか否かを抽選する当否抽選手段1135と、各乱数に基づき、各図柄の停止図柄及び変動態様(変動時間等)を決定するための図柄内容決定手段1140と、各図柄の変動及び停止表示する制御を行うための表示制御手段1150と、第2主遊技始動口2110の電動役物2112の開閉決定に直接関連する各種処理を行うための電動役物開閉制御手段1160と、通常遊技よりも遊技者に有利な各特別遊技に関する制御を司る特別遊技制御手段1170と、第1主遊技及び第2主遊技に関し、現在の遊技状態をどの遊技状態に移行させるかの決定と、当該決定に基づき遊技状態を移行させる処理を行うための特定遊技制御手段1180と、現在の遊技状態{例えば、主遊技に関する状態(通常遊技状態、確率変動遊技状態、時間短縮遊技状態、特別遊技状態)、補助遊技に関する状態(易開放状態、非易開放状態)、主遊技図柄に係る停止図柄及び変動態様情報、各種フラグのオンオフ状況、特別遊技中の遊技状態(例えばラウンド数や入賞個数情報)}等を一時記憶するための遊技状態一時記憶手段1190とを有している。以下、各手段について詳述する。
Here, the game control means 1100 determines whether or not each random number can be acquired by determining whether or not each ball can be acquired, and whether or not the ball determination means 1110 determines whether the game ball flows into each ball entrance (starting port, etc.). Random number acquisition determination execution means 1120 for acquiring each random number, a hold control means 1130 for temporarily storing a ball entering each start port during a variable display as a hold ball within an upper limit number, and game contents to be described later Win / fail lottery means 1135 for lottery based on a determined random number (win random number), and symbol content determining means for determining a stop symbol and a variation mode (variation time, etc.) of each symbol based on each random number. 1140, display control means 1150 for performing control to change and stop each symbol, and various processes directly related to determination of opening / closing of the
まず、入球判定手段1110は、第1主遊技始動口2210へ遊技球が入球したか否かを判定する第1主遊技始動口入球判定手段1111と、第2主遊技始動口2110へ遊技球が入球したか否かを判定する第2主遊技始動口入球判定手段1112と、補助遊技入球口2410に遊技球が流入したか否かを判定する補助遊技入球口入球判定手段1113とを有している。
First, the entrance determination means 1110 is directed to the first main game start entrance entrance determination means 1111 and the second main
次に、乱数取得判定実行手段1120は、第1主遊技始動口2210への遊技球の入球に基づき遊技内容決定乱数(第1主遊技乱数)を取得するか否かを判定すると共に、判定結果に応じて当該乱数(例えば、当選乱数、変動態様決定乱数、主遊技図柄決定乱数等)を取得する第1主遊技乱数取得判定実行手段1121と、第2主遊技始動口2110への遊技球の入球に基づき遊技内容決定乱数(第2主遊技乱数)を取得するか否かを判定すると共に、判定結果に応じて当該乱数(例えば、当選乱数、変動態様決定乱数、主遊技図柄決定乱数等)を取得する第2主遊技乱数取得判定実行手段1122と、補助遊技図柄当選乱数の取得の可否を判定し、当該判定結果に基づき当該乱数を取得するための補助遊技乱数取得判定実行手段1123とを有している。
Next, the random number acquisition determination execution means 1120 determines whether or not to acquire a game content determination random number (first main game random number) based on the game ball entering the first main
ここで、上記を含め本特許請求の範囲及び本明細書における「乱数」は、例えば、乱数の種類により割り振られた「0」〜「65535」(当選乱数)や「0」〜「255」(変動態様決定乱数)といった所定範囲からランダムに選択された値である。また、乱数としては、数学的に発生させる乱数でなくともよく、ハードウエア乱数やソフトウエア乱数等により発生させる擬似乱数でもよい。例えば、乱数にある夫々の値の発現方式が、乱数の数列に沿って順々に値を発現させる方式(プラスワン方式)、乱数の数列の最終値が発現したときの次の値(初期値)を偶然性のある値によって定める方式(初期値更新方式)、これらの組み合わせ等を挙げることができる。 Here, the “random numbers” in the claims and the present specification including the above are, for example, “0” to “65535” (winning random numbers) or “0” to “255” ( It is a value randomly selected from a predetermined range such as (variation mode determination random number). The random number may not be a mathematically generated random number, but may be a pseudo random number generated by a hardware random number, a software random number, or the like. For example, the expression method of each value in the random number is a method in which the value is expressed in order along the random number sequence (plus one method), the next value when the final value of the random number sequence is expressed (initial value) ) With a contingent value (initial value update method), a combination of these, and the like.
次に、保留制御手段1130は、第1主遊技図柄変動許可が下りていない状況で取得した当該遊技内容決定乱数を一時記憶するか否かを判定し、当該判定結果に基づき前記乱数を図柄変動許可が下りるまで第1主遊技図柄保留情報一時記憶手段1131aに保留するための第1主遊技図柄保留手段1131と、第2主遊技図柄変動許可が下りていない状況で取得した当該遊技内容決定乱数を一時記憶するか否かを判定し、当該判定結果に基づき前記乱数を図柄変動許可が下りるまで第2主遊技図柄保留情報一時記憶手段1132aに保留するための第2主遊技図柄保留手段1132と、補助遊技図柄変動許可が下りていない状況で取得した補助遊技図柄当選乱数を一時記憶するか否かを判定し、当該判定結果に基づき当該乱数を図柄変動許可が下りるまで保留するための補助遊技図柄保留手段1133とを有している。ここで、第1主遊技図柄保留手段1131、第2主遊技図柄保留手段1132及び補助遊技図柄保留手段1133は、最大4個まで記憶可能な、前記乱数を保留順序と結合した形で一時記憶するための、第1主遊技図柄保留情報一時記憶手段1131a、第2主遊技図柄保留情報一時記憶手段1132a及び補助遊技図柄保留情報一時記憶手段1133aを夫々有している。 Next, the hold control means 1130 determines whether or not to temporarily store the game content determination random number acquired in a situation where the first main game symbol variation permission has not been granted, and based on the determination result, the random number is subjected to symbol variation. The first main game symbol hold means 1131 for holding in the first main game symbol hold information temporary storage means 1131a until permission is granted, and the game content determination random number acquired in a situation where the second main game symbol change permission is not given. And a second main game symbol holding means 1132 for holding the random number in the second main game symbol hold information temporary storage means 1132a until the symbol variation permission is lowered based on the determination result. , Determine whether to temporarily store the auxiliary game symbol winning random number acquired in the situation where the auxiliary game symbol variation permission has not been granted, and based on the determination result, the random number is permitted to vary And an auxiliary game symbol hold means 1133 for holding up descend. Here, the first main game symbol holding means 1131, the second main game symbol holding means 1132 and the auxiliary game symbol holding means 1133 can temporarily store up to four random numbers combined with the holding order. The first main game symbol hold information temporary storage means 1131a, the second main game symbol hold information temporary storage means 1132a, and the auxiliary game symbol hold information temporary storage means 1133a are provided.
次に、当否抽選手段1135は、当否抽選の結果、当りである場合に特別遊技への移行決定をする(例えば、内部的に当りフラグをオンにする)特別遊技移行決定手段1135aと、当否抽選を行う際に参照される当否抽選用テーブル1135bとを、有している。ここで、当否抽選用テーブル1135bは、第1主遊技図柄に関しての当否抽選を行う際に参照される第1主遊技用当否抽選テーブル1135b−1と、第2主遊技図柄に関しての当否抽選を行う際に参照される第2主遊技用当否抽選テーブル1135b−3と、を有している。ここで、表1は、遊技状態毎の、第1主遊技用当否抽選テーブルと第2主遊技用当否抽選テーブルの例である。尚、本実施形態では、説明の便宜上、小当り抽選テーブルは省略したが、このようなテーブルが別に存在していてもよい(この場合、先に大当り抽選をして次に小当り抽選をするか、先に小当り抽選をして次に大当り抽選をする)。或いは、大当りと小当りとが一緒になった一の抽選テーブルであってもよい。

次に、図柄内容決定手段1140は、取得した遊技内容決定乱数(第1主遊技乱数)に基づき、第1主遊技図柄の停止図柄と変動態様(変動時間等)を決定する第1主遊技内容決定手段1141と、取得した遊技内容決定乱数(第2主遊技乱数)に基づき、第2主遊技図柄の停止図柄と変動態様(変動時間等)を決定する第2主遊技内容決定手段1142と、取得した補助遊技図柄当選乱数に基づき補助遊技図柄の停止図柄を決定する補助遊技内容決定手段1143とを有している。 Next, the symbol content determination means 1140 determines the stop symbol and variation mode (variation time, etc.) of the first main game symbol based on the acquired game content determination random number (first main game random number). A second main game content determination unit 1142 that determines a stop pattern and a variation mode (variation time, etc.) of the second main game symbol based on the determination unit 1141 and the acquired game content determination random number (second main game random number); And auxiliary game content determining means 1143 for determining a stop symbol of the auxiliary game symbol based on the acquired auxiliary game symbol winning random number.
ここで、第1主遊技内容決定手段1141は、第1主遊技図柄に係る停止図柄や変動態様を決定する際に参照される第1主遊技内容決定用抽選テーブル1141aを有しており、当該第1主遊技内容決定用抽選テーブル1141aは、当否結果・遊技状態に応じて異なる各種抽選テーブルを備えている(例えば、遊技状態に関しては、通常遊技→第1主遊技通常遊技状態用抽選テーブル、確率変動遊技→第1主遊技確率変動遊技状態用抽選テーブル、時間短縮遊技→第1主遊技時間短縮遊技状態用抽選テーブル)。また、第2主遊技内容決定手段1142は、第2主遊技図柄に係る停止図柄や変動態様を決定する際に参照される第2主遊技内容決定用抽選テーブル1142aを有しており、当該第2主遊技内容決定用抽選テーブル1142aは、当否結果・遊技状態に応じて異なる各種抽選テーブルを備えている(例えば、遊技状態に関しては、通常遊技→第2主遊技通常遊技状態用抽選テーブル、確率変動遊技→第2主遊技確率変動遊技状態用抽選テーブル、時間短縮遊技→第2主遊技時間短縮遊技状態用抽選テーブル)。更に、補助遊技内容決定手段1143は、補助遊技図柄に係る停止図柄を決定する際に参照される補助遊技内容決定用抽選テーブル1143aを有しており、当該補助遊技内容決定用抽選テーブル1143aは、遊技状態に応じて異なる各種当選テーブルを備えている(通常遊技→補助遊技通常用抽選テーブル、確率変動遊技及び時間短縮遊技→補助遊技時間短縮用抽選テーブル)。ここで、表2は、当否結果・遊技状態毎の、第1主遊技内容決定用抽選テーブル及び第2主遊技内容決定用抽選テーブル(停止図柄)の例である。表2に示されるように、本実施形態では、大当り図柄として複数の図柄が存在している。そして、この図柄の種類に基づいて、特別遊技時の利益状態や特別遊技後の遊技状態が決まるよう構成されている(これについては後述する)。また、表3は、当否結果・遊技状態毎の、第1主遊技内容決定用抽選テーブル及び第2主遊技内容決定用抽選テーブル(変動態様)の例である。尚、本実施形態では、説明の便宜上、保留球数に応じて異なるテーブルを有するよう構成しなかったが、保留球数に応じて異なるテーブルを有するように構成してもよいことはいうまでもない。また、本実施形態では、説明の便宜上、主遊技内容決定用抽選テーブル構成を第1主遊技図柄と第2主遊技図柄とで共通としたが、異なるテーブル構成としてもよい。
次に、表示制御手段1150は、第1主遊技図柄表示装置2130の第1主遊技図柄表示部2131上で、所定時間第1主遊技図柄を変動させた後に停止表示する制御を行う第1主遊技図柄制御手段1151と、第2主遊技図柄表示装置2230の第2主遊技図柄表示部2231上で、所定時間第2主遊技図柄を変動させた後に停止表示する制御を行う第2主遊技図柄制御手段1152と、第1主遊技図柄保留情報一時記憶手段1131a及び第2主遊技図柄保留情報一時記憶手段1132aのいずれにも乱数が一時記憶されている場合には、いずれの乱数保留手段に一時記憶された乱数に基づく主遊技図柄の変動を優先するかを決定する主遊技図柄保留解除制御手段1154と、補助遊技図柄表示装置2420の補助遊技図柄表示部2421上で、所定時間補助遊技図柄を変動させた後に停止表示する制御を行う補助遊技図柄制御手段1153とを有している。
Next, the display control means 1150 controls the first main game
ここで、第1主遊技図柄制御手段1151は、前記第1主遊技内容決定手段1141により決定された変動態様に係る変動時間を管理するための第1主遊技図柄変動時間管理手段1151aを更に有している。また、第1主遊技図柄変動時間管理手段1151aは、ゼロクリア可能な第1主遊技図柄変動管理用タイマ1151a−1(デクリメントカウンタ)を更に有している。次に、第2主遊技図柄制御手段1152は、前記第2主遊技内容決定手段1142により決定された変動態様に係る変動時間を管理するための第2主遊技図柄変動時間管理手段1152aを更に有している。また、第2主遊技図柄変動時間管理手段1152aは、ゼロクリア可能な第2主遊技図柄変動管理用タイマ1152a−1(デクリメントカウンタ)を更に有している。更に、補助遊技図柄制御手段1153は、補助遊技図柄表示装置2420の補助遊技図柄表示部2421上での補助遊技図柄の変動時間を管理するための補助遊技図柄変動時間管理手段1153aを有している。また、補助遊技図柄変動時間管理手段1153aは、時間を計測可能な補助遊技図柄変動管理用タイマ1153a−1を更に備えている。
Here, the first main game symbol control means 1151 further includes first main game symbol change time management means 1151a for managing the change time according to the change mode determined by the first main game content determination means 1141. is doing. The first main game symbol variation time management means 1151a further includes a first main game symbol
次に、電動役物開閉制御手段1160は、第2主遊技始動口2110の電動役物2112を開閉する処理を行うための条件を充足しているか否かを判定するための条件判定手段1161と、第2主遊技始動口2110の電動役物2112の駆動(開放)時間を計測する開放タイマ1162とを有している。
Next, the electric accessory opening / closing control means 1160 includes a condition determining means 1161 for determining whether or not a condition for performing a process for opening and closing the
次に、特別遊技制御手段1170は、特別遊技に移行するための条件を充足しているか否か、具体的には、当りに当選している(当りフラグが発生している)か否かの判定と共に、第1主遊技図柄が所定態様(所定態様「7A」〜「1A」)で停止したか否か又は第2主遊技図柄が所定態様(所定態様「7B」〜「1B」)で停止したか否かを判定する条件判定手段1171と、特別遊技移行条件を充足している場合、当該特別遊技の内容(具体的には、開状態とする大入賞口、ラウンド数、ラウンド間時間等)を特別遊技関連情報一時記憶手段1194中にセットする特別遊技内容決定手段1172と、第1大入賞口2122又は第2大入賞口2220を所定条件で開状態にするという特別遊技を実行するための特別遊技実行手段1173と、特別遊技に関する各種処理の時間管理を行うための特別遊技時間管理手段1174とを有している。ここで、特別遊技時間管理手段1174は、時間を計測可能な特別遊技用タイマ1174aを更に有している。また、特別遊技内容決定手段1172は、特別遊技関連情報一時記憶手段1194にセットされるべき前記特別遊技の内容を特定する際に参照される特別遊技内容参照テーブル1172aを更に有している。ここで、表4は、特別遊技内容参照テーブルの一例である。表4に示されるように、「7A、7B」は、多くの出球を獲得できる高利益特別遊技である。他方、「6A〜1A、6B〜1B」は、多くの出球を獲得できない低利益特別遊技である。ここで、表1及び表2に示される内容と照らし合わせると分かるように、高利益特別遊技が付される割合は、第1主遊技よりも第2主遊技の方が高くなっており、大当り確率及び確率変動大当りが付される割合は、第1主遊技と第2主遊技とで同一である。即ち、本実施形態では、第1主遊技の利益率よりも第2主遊技での利益率の方が総じて高くなるよう構成されているが、これには限定されず、第1主遊技と第2主遊技の利益率が同等であるよう構成されていてもよい。
次に、特定遊技制御手段1180は、特定遊技状態の終了条件を充足しているか否かを判定する特定遊技終了条件判定手段1181を有している。ここで、特定遊技終了条件判定手段1181は、時短回数をカウント可能な時短回数カウンタ1181aを更に有している。ここで、「特定遊技」とは、例えば、特別遊技への抽選確率が通常遊技時よりも高い確率変動遊技や、主遊技図柄の変動時間が通常遊技時よりも相対的に短い時間短縮遊技を指す。 Next, the specific game control means 1180 has specific game end condition determination means 1181 for determining whether or not the end condition for the specific game state is satisfied. Here, the specific game end condition determining means 1181 further includes a time reduction counter 1181a capable of counting the time reduction. Here, the “specific game” means, for example, a probability variation game in which a lottery probability for a special game is higher than that in a normal game or a time shortening game in which the variation time of the main game symbol is relatively shorter than that in a normal game. Point to.
ここで、本実施形態においては、時短中には、非時短中と比較して、第1主遊技図柄及び第2主遊技図柄の変動時間が相対的に短縮される(時間短縮機能)。更に、補助遊技図柄の変動時間も相対的に短縮されると共に、第2主遊技始動口2110の電動役物2112の開放延長時間が相対的に延長される(開放時間延長機能)。また、本実施形態における時短は、第1主遊技図柄の変動回数と第2主遊技図柄の変動回数の合計値が所定回数を超えた場合に終了する(時短回数制限無しの確率変動遊技を除く)。即ち、時短回数は、第1主遊技図柄及び第2主遊技図柄の変動(停止)毎に減算される。ここで、表4に示されるように、本実施形態においては、当り図柄ごとに特定遊技内容が予め定められており、夫々の当り図柄に係る特別遊技終了時に、本テーブルを参照して特定遊技内容が決定される。尚、上記の特定遊技終了条件判定手段1181は、例えば、図柄変動の度に所定確率で特定遊技(例えば確率変動遊技や時間短縮遊技)から通常遊技への移行抽選を行う機能を有していてもよい(転落抽選機能を有するぱちんこ遊技機の場合)。
Here, in the present embodiment, during the time reduction, the variation time of the first main game symbol and the second main game symbol is relatively shortened (time reduction function) as compared with the non-time reduction. Furthermore, the variation time of the auxiliary game symbol is also relatively shortened, and the opening extension time of the
次に、遊技状態一時記憶手段1190は、第1主遊技(第1主遊技図柄の変動から停止に至るまでの遊技)における現在の遊技状態を一時記憶するための第1主遊技状態一時記憶手段1191と、第2主遊技(第2主遊技図柄の変動から停止に至るまでの遊技)における現在の遊技状態を一時記憶するための第2主遊技状態一時記憶手段1192と、補助遊技における現在の遊技状態を一時記憶するための補助遊技状態一時記憶手段1193と、特別遊技における現在の遊技状態(例えば、ラウンド数、任意のラウンドにおける遊技球の入賞個数、特別遊技に関する各種フラグのオンオフ等)を一時記憶するための特別遊技関連情報一時記憶手段1194とを有している。 Next, the game state temporary storage means 1190 is a first main game state temporary storage means for temporarily storing the current game state in the first main game (game from the change of the first main game symbol to the stop). 1191, second main game state temporary storage means 1192 for temporarily storing the current game state in the second main game (game from the change of the second main game symbol to the stop), and current in the auxiliary game Auxiliary game state temporary storage means 1193 for temporarily storing the game state and the current game state in the special game (for example, the number of rounds, the number of game balls won in any round, on / off of various flags related to the special game, etc.) Special game related information temporary storage means 1194 for temporary storage.
ここで、第1主遊技状態一時記憶手段1191は、第1主遊技に関する各種遊技状態における各種フラグのオンオフ情報を一時記憶するための第1フラグ一時記憶手段1191aと、現在変動中の第1主遊技図柄(変動開始条件が成立した第1主遊技図柄)に係る停止図柄及び変動態様情報を一時記憶するための第1主遊技図柄情報一時記憶手段1191bとを有している。 Here, the first main game state temporary storage means 1191 is a first flag temporary storage means 1191a for temporarily storing ON / OFF information of various flags in various game states related to the first main game, and the first main game state that is currently changing. And a first main game symbol information temporary storage means 1191b for temporarily storing stop symbols and variation mode information related to the game symbols (first main game symbols satisfying the change start condition).
また、第2主遊技状態一時記憶手段1192は、第2主遊技に関する各種遊技状態における各種フラグのオンオフ情報を一時記憶するための第2フラグ一時記憶手段1192aと、現在変動中の第2主遊技図柄(変動開始条件が成立した第2主遊技図柄)に係る停止図柄及び変動態様情報を一時記憶するための第2主遊技図柄情報一時記憶手段1192bとを有している。 The second main game state temporary storage means 1192 includes second flag temporary storage means 1192a for temporarily storing ON / OFF information of various flags in various game states related to the second main game, and the second main game that is currently changing. There is a second main game symbol information temporary storage means 1192b for temporarily storing the stop symbol and the variation mode information related to the symbol (second main game symbol for which the variation start condition is satisfied).
また、補助遊技状態一時記憶手段1193は、補助遊技に関する情報(例えば、補助遊技図柄当選フラグ・開放延長フラグ・時間短縮フラグ等の各種フラグのオンオフ情報)を一時記憶するための補助遊技関連情報一時記憶手段1193aと、現在変動中の補助遊技図柄(変動開始条件が成立した補助遊技図柄)に係る停止図柄等の情報を一時記憶するための補助遊技図柄情報一時記憶手段1193bとを有している。 The auxiliary game state temporary storage unit 1193 temporarily stores information related to the auxiliary game (for example, on / off information of various flags such as an auxiliary game symbol winning flag, a release extension flag, and a time reduction flag). It has storage means 1193a and auxiliary game symbol information temporary storage means 1193b for temporarily storing information such as stop symbols related to the currently changing auxiliary game symbols (auxiliary game symbols for which change start conditions are established). .
次に、振動エラー検出制御手段1600は、遊技機に印加された振動に係るエラー検出時において主制御装置側における入力手段(例えば、入球判定手段)を無効とするよう制御する振動エラー検出時入力無効化手段1610と、当該入力手段の無効化状態を保持する期間である入力無効化状態保持期間を計時するための入力無効化状態保持期間タイマ1611と、を有している。尚、振動エラー検出時には賞球制御装置に打球の発射許可を取消すように制御させても良く、エラー時の遊技情報を一旦RAMに退避させておき、復帰時にエラー時の遊技状態から再開させるよう構成しても良い。
Next, the vibration error detection control means 1600 controls to invalidate the input means (for example, a ball entry determination means) on the main controller side when detecting an error related to vibration applied to the gaming machine. An input invalidation means 1610 and an input invalidation state
次に、遊技周辺機器2000について説明する。尚、一部の周辺機器については既に詳細構成を述べたので、残る構成について簡潔に説明する。まず、遊技周辺機器は、第1主遊技側の周辺機器である第1主遊技周辺機器Aと、第2主遊技側の周辺機器である第2主遊技周辺機器Bと、第1主遊技側と第2主遊技側の共用周辺機器である第1・第2主遊技共用周辺機器Cと、補助遊技に関する補助遊技周辺機器Dと、を有している。以下、これらの周辺機器を順番に説明する。 Next, the gaming peripheral device 2000 will be described. Since some of the peripheral devices have already been described in detail, the remaining configuration will be briefly described. First, the game peripheral devices are a first main game peripheral device A that is a peripheral device on the first main game side, a second main game peripheral device B that is a peripheral device on the second main game side, and a first main game side. And a first and second main game shared peripheral device C that is a shared peripheral device on the second main game side, and an auxiliary game peripheral device D related to the auxiliary game. Hereinafter, these peripheral devices will be described in order.
まず、第1主遊技周辺機器Aは、特別遊技移行の契機となる第1主遊技始動口2210と、第1主遊技図柄の停止表示及び変動表示が可能な第1主遊技図柄表示装置2130とを有している。
First, the first main game peripheral device A includes a first main
次に、第2主遊技周辺機器Bは、特別遊技移行の契機となる第2主遊技始動口2110と、第2主遊技図柄の停止表示及び変動表示が可能な第2主遊技図柄表示装置2230とを有している。
Next, the second main game peripheral device B has a second main
次に、第1・第2主遊技共用周辺機器Cは、通常遊技の際には閉状態にあり、特別遊技の際には所定条件下で開状態となる第1大入賞口2120と、通常遊技の際には閉状態にあり、特別遊技の際には所定条件下で開状態となる第2大入賞口2220と、を有する。
Next, the first / second main game shared peripheral device C is in a closed state during a normal game, and is opened under a predetermined condition during a special game. It has a second
次に、補助遊技周辺機器2400は、第2主遊技始動口2110の電動役物2112の開放の契機となる補助遊技入球口2410と、補助遊技図柄の停止表示及び変動表示が可能な補助遊技図柄表示装置2420とを有している。
Next, the auxiliary game peripheral device 2400 has an
更に、主制御装置1000は、演出に係る一切の出力(表示を含む)制御を司るサブメイン制御基板(演出表示制御手段2320)と一方向的に情報伝達可能に接続している。そして、演出表示制御手段2320は、装飾図柄の停止表示及び変動表示や特別遊技中の遊技進行状況を示す表示を含め、演出に係る出力を行うサブサブ制御基板(演出表示手段2310)と情報伝達可能に接続している。尚、演出は、第1主遊技図柄及び第2主遊技図柄の変動と時間的に同期の取れた形での装飾図柄の変動を含め、遊技の結果に影響を与えない情報のみの表示に係るものである。
Furthermore,
ここで、演出表示制御手段2320は、主制御装置1000側からの各種情報を受信するための表示情報受信手段2321と、装飾図柄の変動態様や停止図柄の決定処理及び表示制御処理を司る装飾表示制御手段2322と、装飾図柄の保留個数管理や保留表示処理を司る装図保留情報表示制御手段2323と、予告演出・特別遊技中演出・装飾ランプや音声等の演出をはじめとする演出一般の情報を一時記憶するための演出一般情報一時記憶手段2324と、可動体役物の動作制御を司る可動体役物制御手段2325と、遊技機への電源投入時においてサブ基板側で実行される電源投入時処理の制御を司る電源立ち上げ時処理制御手段2326と、演出モード等のサブ基板側での遊技状態を制御するサブ側遊技状態制御手段2327と、を有している。以下、上記各手段を詳述する。
Here, the effect display control means 2320 is a display information receiving means 2321 for receiving various types of information from the
まず、表示情報受信手段2321は、主制御装置1000側からの第1主遊技及び第2主遊技に関する図柄情報や表示指示情報を一時記憶するためのメイン側情報一時記憶手段2321aを有している。
First, the display information receiving means 2321 has main-side information temporary storage means 2321a for temporarily storing symbol information and display instruction information related to the first main game and the second main game from the
次に、装飾図柄表示制御手段2322は、主制御装置1000側からの情報に基づいて、装飾図柄の停止図柄及び変動態様を決定する装図表示内容決定手段2322aと、装飾図柄の変動態様や図柄の画像・動画像データ等を記憶するための装図変動態様・図柄記憶手段2322bと、装飾図柄の図柄変動に係る各種情報(変動態様情報、停止図柄情報、各種フラグ等)を一時記憶するための装図表示関連情報一時記憶手段2322cと、主制御装置1000側から受信した図柄情報に係る不整合を検出した際に装飾図柄の停止図柄として特殊停止図柄を決定する装図特殊停止図柄内容決定手段2322dと、を有している。ここで、装図表示内容決定手段2322aは、装飾図柄の停止図柄及び変動態様を決定する際に参照される装図変動内容決定用抽選(参照)テーブル2322a−1を有している。表5は、停止図柄決定用参照テーブルであり、表6は、変動態様決定用参照テーブルである。これら表から分かるように、本実施形態においては、主制御装置1000側から送信される主遊技図柄情報(停止図柄情報や変動態様情報)に基づき、装飾図柄の停止図柄や変動態様が決定されるよう構成されている。尚、装飾図柄の停止図柄については、当りの場合には主遊技図柄の属性情報を踏まえて抽選で決定し、ハズレの場合にはリーチか非リーチかに基づいて抽選で決定するよう構成し、装飾図柄の変動態様については、主遊技図柄の変動態様に基づき一義的に特定されるよう構成されているが、これには何ら限定されない。例えば、主遊技図柄の停止図柄に紐付いて装飾図柄が一義的に決定されるよう構成されていても、主遊技図柄の変動態様(又は変動時間)に基づいて装飾図柄の変動態様が抽選で決定されるよう構成されていてもよい。
また、装図特殊停止図柄内容決定手段2322dは、装飾図柄の特殊停止図柄を決定するために参照される特殊停止図柄内容決定用参照テーブル2322d−1を有している。ここで、表7は、特殊停止図柄内容決定用参照テーブル2322d−1の一例である。本表に示されるように、特殊停止図柄内容決定用参照テーブル2322d−1には、特殊停止図柄としての停止図柄が記憶されている。ここで、特殊停止図柄における個々の停止図柄は、装図変動内容決定用参照テーブル2322a−1における停止図柄決定用参照テーブルにて使用されている図柄(本例では、数字図柄)の組合せによって表されている。そして、後述するように、所定の条件を充足した場合(例えば、メイン側から送信された図柄情報が正常でないことを検出した場合)に限り当該特殊停止図柄が選択されると共に、所定の条件を充足していない場合には、当該特殊停止図柄が選択されないよう構成されている。尚、特殊停止図柄の代わりに特殊変動態様(例えば、中図柄→右図柄→左図柄の停止順に図柄停止)を設け、所定の条件を充足した場合に限り特殊変動態様が選択されると共に、所定の条件を充足していない場合には、特殊変動態様が選択されないよう構成してもよい。
次に、装図保留情報表示制御手段2323は、装飾図柄に係る保留に関する情報を一時記憶するための装図保留情報一時記憶手段2323aを有している。また、装図保留情報一時記憶手段2323aは、装飾図柄に係る保留数をカウントするための装図保留カウンタ2322a−1を有している。 Next, the drawing hold information display control means 2323 has a drawing hold information temporary storage means 2323a for temporarily storing information related to the hold related to the decorative design. Moreover, the drawing hold information temporary storage means 2323a has the drawing hold counter 2322a-1 for counting the number of hold concerning a decoration design.
次に、可動体役物制御手段2325は、可動体役物の初期動作に係る動作制御を司る可動体役物初期動作実行制御手段2325aと、可動体役物のエラー解消動作(リトライ動作)に係る動作制御を司る可動体役物エラー解消動作実行制御手段2325bと、可動体役物の演出動作に係る動作制御を司る可動体役物演出動作実行制御手段2325cと、可動体役物の動作制御に係る情報が一時記憶される可動体役物動作状態情報一時記憶手段2325dと、可動体役物の位置情報を把握し可動体役物の異常動作に係る監視制御を司る可動体役物異常動作監視制御手段2325eと、可動体役物を駆動する駆動源に対する励磁制御を司る可動体役物駆動源励磁制御手段2325fと、可動体役物の駆動源に対する過度の電力供給を回避するための可動体役物過通電回避制御手段2325gと、メイン側からの振動エラーに係る情報受信時に可動体役物を特殊可動させる制御を最優先に実行する制御を司る可動体役物特殊可動実行制御手段2325hと、を有している。 Next, the movable body accessory control means 2325 performs the movable body accessory initial operation execution control means 2325a that controls the operation related to the initial operation of the movable body accessory and the error elimination operation (retry operation) of the movable body accessory. The movable body accessory error elimination operation execution control means 2325b that controls the motion control, the movable body effect production operation execution control means 2325c that manages the motion control related to the rendering operation of the movable body accessory, and the operation control of the movable body accessory The movable body accessory operation state information temporary storage means 2325d for temporarily storing information related to the above, and the movable body accessory abnormal operation for grasping the position information of the movable body accessory and supervising the monitoring control related to the abnormal operation of the movable body accessory In order to avoid excessive power supply to the monitoring control means 2325e, the movable body accessory drive source excitation control means 2325f that controls excitation control for the drive source that drives the movable accessory, and the drive source of the movable accessory. Movable body accessory over-electricity avoidance control means 2325g, and movable body accessory special movement execution control means for controlling to execute the control of moving the movable body accessory specially when receiving information related to the vibration error from the main side. 2325h.
次に、可動体役物初期動作実行制御手段2325aは、可動体役物の初期動作実行可否及び初期動作内容を決定する初期動作実行可否・内容決定手段2325a−1と、可動体役物の初期動作内容に基づき可動体役物の動作開始制御を実行する初期動作開始制御手段2325a−2と、可動体役物の初期動作実行状態を把握すると共に可動体役物の動作終了制御を実行する初期動作終了制御手段2325a−3と、を有している。また、初期動作実行可否・内容決定手段2325a−1は、夫々の可動体役物の初期動作内容を決定するために参照される初期動作内容決定用参照テーブル2325a−1−1を有している。 Next, the movable body accessory initial operation execution control means 2325a includes initial motion execution availability / content determination means 2325a-1 for determining whether or not the initial motion execution of the movable body accessory and the initial motion content, and the initial of the movable body accessory. Initial operation start control means 2325a-2 for executing operation start control of the movable body accessory based on the operation content, and initial stage for executing the operation end control of the movable body accessory while grasping the initial operation execution state of the movable body accessory Operation end control means 2325a-3. Further, the initial motion execution availability / content determination means 2325a-1 includes an initial motion content determination reference table 2325a-1-1 that is referred to in order to determine the initial motion content of each movable body accessory. .
ここで、表8は、初期動作内容決定用参照テーブル2325b−1−1の一例である。本例に示されるように、初期動作内容決定用参照テーブル2325b−1−1には、夫々の可動体役物の初期動作に係る動作内容が定められている。また、初期動作に係る動作内容としては、可動体役物の移動位置、他の可動体役物との干渉有無及び可動体役物の動作優先順位が定められている。そして、後述するように、当該初期動作に係る動作内容に基づき夫々の可動体役物の初期動作が実行されるよう構成されている。
次に、可動体役物エラー解消動作実行制御手段2325bは、可動体役物のエラー解消動作実行可否及びエラー解消動作内容を決定するエラー解消動作実行可否・内容決定手段2325b−1と、可動体役物のエラー解消動作内容に基づき可動体役物の動作開始制御を実行するエラー解消動作開始制御手段2325b−2と、可動体役物のエラー解消動作実行状態を把握すると共に可動体役物の動作終了制御を実行するエラー解消動作終了制御手段2325b−3と、を有している。また、エラー解消動作実行可否・内容決定手段2325b−1は、夫々の可動体役物のエラー解消動作内容を決定するために参照されるエラー解消動作内容決定用参照テーブル2325b−1−1を有している。 Next, the movable body accessory error elimination operation execution control means 2325b includes an error elimination operation execution feasibility / content decision means 2325b-1 for determining whether or not the error elimination operation can be performed for the movable body accessory and the error elimination operation content, and the movable body An error-resolving operation start control means 2325b-2 for executing the operation start control of the movable object based on the error-resolving operation content of the accessory, and grasping the error-resolving operation execution state of the movable object and the movable object And error elimination operation end control means 2325b-3 for executing operation end control. Further, the error resolving operation execution possibility / content determination means 2325b-1 has an error resolving operation content determination reference table 2325b-1-1 that is referred to in order to determine the error resolving operation content of each movable body accessory. is doing.
ここで、表9は、エラー解消動作内容決定用参照テーブル2325b−1−1の一例である。本例に示されるように、エラー解消動作内容決定用参照テーブル2325b−1−1には、夫々の可動体役物のエラー解消動作に係る動作内容が定められている。また、エラー解消動作に係る動作内容としては、可動体役物の移動位置、他の可動体役物との干渉有無及び可動体役物の動作優先順位が定められている。そして、後述するように、当該エラー解消動作に係る動作内容に基づき夫々の可動体役物のエラー解消動作が実行されるよう構成されている。
次に、可動体役物演出動作実行制御手段2325cは、可動体役物の演出動作実行可否及び演出動作内容を決定する演出動作実行可否・内容決定手段2325c−1と、可動体役物の演出動作内容に基づき可動体役物の動作開始制御を実行する演出動作開始制御手段2325c−2と、可動体役物の演出動作実行状態を把握すると共に可動体役物の動作終了制御を実行する演出動作終了制御手段2325c−3と、を有している。また、演出動作実行可否・内容決定手段2325c−1は、夫々の可動体役物の演出動作内容を決定するために参照される演出動作内容決定用参照テーブル2325c−1−1を有している。 Next, the movable body effect production operation execution control means 2325c includes the production operation execution availability / content determination means 2325c-1 for determining whether or not the production operation execution of the movable body accessory and the content of the production operation are performed, and the production of the movable body accessory. An effect operation start control means 2325c-2 for executing the operation start control of the movable body accessory based on the operation content, and an effect for grasping the effect operation execution state of the movable object and executing the operation end control of the movable object Operation end control means 2325c-3. Further, the performance operation execution propriety / content determination means 2325c-1 includes a performance operation content determination reference table 2325c-1-1 that is referred to in order to determine the performance operation content of each movable body accessory. .
ここで、表10は、演出動作内容決定用参照テーブル2325c−1−1の一例である。本例に示されるように、演出動作内容決定用参照テーブル2325c−1−1には、夫々の可動体役物の演出動作に係る動作内容が定められている。また、演出動作に係る動作内容としては、装飾図柄の変動態様の夫々について、可動体役物の動作パターン及び動作タイミング(変動開始からの経過秒数)が定められている。そして、後述するように、当該演出動作に係る動作内容に基づき夫々の可動体役物の演出動作が実行されるよう構成されている。ここで、演出動作に係る動作内容は、他の動作内容(初期動作、エラー解消動作)と異なり、干渉し得る可動体役物(本例では、可動体役物A及びC)についての動作優先順位が定められていない。その理由は、動作タイミングの一例に示されるように、可動体役物Aの動作タイミングと可動体役物Cの動作タイミングとが異なっており、前者の動作終了後に後者の動作が開始されるよう両者のタイミングが設定されているためである。また、本実施形態では、可動体役物Aと可動体役物Bと(及び可動体役物Cと可動体役物Dと)は、連動動作するよう構成されており、本例では、連動動作する夫々の可動体役物の動作タイミングが同一となるよう構成されている(但し、これには限定されない)。また、本例では、装飾図柄の変動態様と可動体役物の動作内容とは1対1に対応しているが、これには限定されない。
次に、可動体役物異常動作監視制御手段2325eは、可動体役物の基本位置を決定するための可動体役物基本位置決定手段2325e−1と、可動体役物の予定位置と現在位置とを比較すると共に両者の整合性を確認するための可動体役物位置整合性確認手段2325e−2と、可動体役物に係るエラー報知を制御するための可動体役物エラー報知制御手段2325e−4と、を有している。ここで、可動体役物基本位置決定手段2325e−1は、可動体役物の基本位置を決定するために参照される基本位置決定用参照テーブル2325e−1−1を有している。また、可動体役物位置整合性確認手段2325e−2は、可動体役物の位置情報に係る整合性を確認するための所定条件を決定するために参照される位置整合性確認内容決定用参照テーブル2325e−2−1を有している。また、可動体役物エラー報知制御手段2325e−4は、可動体役物に係る異常動作発生回数を累積して一時記憶する可動体役物毎動作異常累積カウンタ2325e−4−1を有している。
Next, the movable body accessory abnormal operation monitoring control means 2325e includes a movable body accessory basic position determining means 2325e-1 for determining a basic position of the movable body accessory, a planned position and a current position of the movable body accessory. And a movable body accessory position consistency confirmation means 2325e-2 for confirming the consistency between the two and a movable body accessory error notification control means 2325e for controlling error notification related to the movable body accessory. -4. Here, the movable body accessory basic position determining means 2325e-1 has a basic position determining reference table 2325e-1-1 which is referred to in order to determine the basic position of the movable body accessory. In addition, the movable body accessory position
ここで、表11は、基本位置決定用参照テーブル2325e−1−1の一例である。本例に示されるように、本実施形態では、可動体役物A〜Dの夫々において、メイン側とサブ側の遊技状態に応じて異なる基本停止位置(非動作時において可動体役物が停止すべき位置)が設定され得るよう構成されている。例えば、メイン側遊技状態が主遊技確率変動遊技状態であり且つサブ側遊技状態が確変ステージAである場合、可動体役物Aは初期位置(電源投入時において可動体役物が停止すべき位置)とは異なる停止位置である停止位置A−2が基本停止位置として設定される。このように、基本停止位置には、メイン側遊技状態数×サブ側遊技状態数となる組合せ数分だけ異なる停止位置を有するよう構成されている。そして、後述するように、当該遊技状態が変化(例えば、メイン側遊技状態が確率変動遊技状態から非確率変動遊技状態に移行、サブ側遊技状態が通常ステージAから通常ステージBに移行等)した後の所定のタイミングを契機として、基本停止位置の設定処理が実行されることとなる。
次に、表12は、位置整合性確認内容決定用参照テーブル2325e−2−1の一例である。本例に示されるように、本実施形態では、予め定められた確認タイミング到達時において、当該確認タイミングにおいて可動体役物が存在すべき位置(予定位置)を定めておき、予定位置と現在位置とを比較した結果、両者が大きく異なる場合には可動体役物の動作異常を検出できるよう構成されている。ここで、本実施形態における確認タイミングは、(1)遊技状態が変化した場合、(2)可動体役物の演出動作実行中の所定タイミング、(3)可動体役物の演出動作終了後、に大別することができる。そして、(1)及び(3)の場合には、前述した基本停止位置が予定位置として設定される。他方、(2)の場合には、基本停止位置と所定の駆動ステップ数とに基づき導出した位置が予定位置として設定されるよう構成されている。このように、確認タイミングを複数設けることによって、可動体役物の動作異常を速やかに検出することが可能となるのである。尚、確認タイミングは一例であり、その他の確認タイミングを設けるよう構成してもよい。その場合には、例えば、所定の時間間隔で定期的に確認タイミングに到達する、所謂ポーリング監視を実行する例を挙げることができる。
次に、可動体役物駆動源励磁制御手段2325fは、可動体役物の駆動源への励磁を開始する制御を司る駆動源励磁開始制御処理2325f−1と、可動体役物の駆動源への励磁を終了する制御を司る駆動源励磁終了制御処理2325f−2と、を有している。 Next, the movable body accessory drive source excitation control means 2325f provides a drive source excitation start control process 2325f-1 for controlling the start of excitation of the movable body accessory to the drive source, and the movable body accessory drive source. Drive source excitation end control processing 2325f-2 for controlling to end the excitation.
次に、可動体役物過通電回避制御手段2325gは、励磁電力を供給する駆動源の上限数を制限する駆動源数上限リミッタ制御手段2325g−1と、夫々の駆動源に対する励磁時間を計時するための駆動源毎通電時間監視タイマ2325g−2と、夫々の駆動源に対して供給された励磁電力に係る情報を累積して一時記憶するための駆動源毎励磁履歴情報累積一時記憶手段2325g−3と、を有している。尚、励磁電力に係る情報は、予め各駆動源に対する単位当たりの消費電力をデータとして記憶しておき、当該励磁電力に係る情報を一時記憶する際に、供給時間と当該データとにより演算導出するように構成しても良い。また、演算導出するタイミングは当該情報を一時記憶する時点ではなく、駆動源数上限リミッタ制御手段2325g−1によるリミッタ制御を行うか否かの判定時に行っても良い(当該判定処理については後述する)。
Next, the movable body overcurrent
次に、可動体役物特殊可動実行制御手段2325hは、可動体役物の特殊可動を実行する前の予備動作である特殊可動準備動作を実行する可動体役物特殊可動準備動作実行制御手段2325h−1と、可動体役物の特殊可動を実行する可動体役物特殊可動実行制御手段2325h−2と、を有している。 Next, the movable body accessory special movement execution control means 2325h executes the movable body accessory special movement preparation operation execution control means 2325h for executing the special movement preparation operation which is a preliminary operation before executing the special movement of the movable body accessory. -1 and movable body accessory special movement execution control means 2325h-2 for executing special movement of the movable body accessory.
尚、第1主遊技図柄表示装置2130、第2主遊技図柄表示装置2230及び補助遊技図柄表示装置2420が、主制御装置1000と情報伝達可能に接続されており、残る演出表示手段2310が、演出表示制御手段2320と情報伝達可能に接続されている。即ち、第1主遊技図柄表示装置2130、第2主遊技図柄表示装置2230及び補助遊技図柄表示装置2420は、主制御装置1000により制御され、演出表示手段2310は、演出表示制御手段2320により制御されることを意味する。尚、主制御装置1000と片方向通信により制御される他の周辺機器を介して、別の周辺機器を制御するように構成してもよい。
The first main game
次に、図9〜図56のフローチャートを参照しながら、本実施形態に係るぱちんこ遊技機の処理の流れを説明する。はじめに、図9〜図19のフローチャートを参照しながら、本実施形態に係るぱちんこ遊技機のメイン基板側での処理の流れを説明する。尚、表13は、図9〜図56の処理中で使用されているフラグの一覧表である。
まず、図9は、主制御装置1000が行う一般的な処理の流れを示したメインフローチャートである。まず、ステップ1020で、主制御装置1000は、電断復帰情報をサブメイン制御基板2320側に送信する。ここで、当該送信処理は、主制御装置1000側での電断復帰時に1度だけ実行される処理であることを補足しておく。次に、ステップ1050で、主制御装置1000は、後述の振動エラー検出時処理を実行する。次に、ステップ1100で、主制御装置1000は、後述の補助遊技図柄当選乱数取得処理を実行する。次に、ステップ1200で、主制御装置1000は、後述の電動役物駆動判定処理を実行する。次に、ステップ1300で、主制御装置1000は、後述の遊技内容決定乱数取得処理を実行する。次に、ステップ1400で、主制御装置1000は、後述の主遊技図柄表示処理を実行する。次に、ステップ1500で、主制御装置1000は、後述の特別遊技作動条件判定処理を実行する。次に、ステップ1600で、主制御装置1000は、後述の特別遊技制御処理を実行する。次に、ステップ1700で、主制御装置1000(特に賞球払出決定手段1400)は、遊技球が入賞した入賞口に基づき、賞球払出制御装置3000を駆動して所定の賞球数の払出処理を行い、本処理フローの先頭に戻る。以下、各サブルーチンに係る処理について詳述する。
First, FIG. 9 is a main flowchart showing the flow of general processing performed by the
次に、図10は、図9におけるステップ1050のサブルーチンに係る、振動エラー検出時処理のフローチャートである。まず、ステップ1052で、振動エラー検出制御手段1600は、周知の手法に基づき、遊技機に対して印加された振動や衝撃に係る振動エラーを検出(例えば、遊技機内の任意の位置に設けた振動センサからの信号に基づき所定値を超える振動を検出する手法や、振動センサ自身が所定値を超える振動を検出した際に振動検出信号を出力し、当該信号に基づいて振動を検出する手法などが挙げられる)したか否かを判定する。ステップ1052でYesの場合、ステップ1054で、振動エラー検出時入力無効化手段1610は、入力無効化状態保持期間タイマ1611に遊技禁止状態の保持期間に係る所定期間をセットして当該タイマを開始する。次に、ステップ1056で、情報送信制御手段1300は、振動エラー報知指示情報をサブメイン制御基板2320側に送信する。次に、ステップ1058で、振動エラー検出時入力無効化手段1610は、主制御装置1000側を遊技禁止状態(例えば、入賞口センサSからの入球信号を無効としたり、発射装置232による遊技球の発射を一時停止する等)へと移行し、次の処理(ステップ1100の補助遊技図柄当選乱数取得処理)に移行する。他方、ステップ1052でNoの場合、ステップ1062で、振動エラー検出時入力無効化手段1610は、入力無効化状態保持期間タイマ1611を参照し、遊技禁止状態の保持期間に係る所定期間が経過したか否かを判定する。ステップ1062でYesの場合、ステップ1064で、振動エラー検出時入力無効化手段1610は、入力無効化状態保持期間タイマ1611を停止する。次に、ステップ1066で、情報送信制御手段1300は、振動エラー報知解除情報をサブメイン制御基板2320側に送信する。次に、ステップ1068で、振動エラー検出時入力無効化手段1610は、主制御装置1000側の遊技禁止状態を解除し、次の処理(ステップ1100の補助遊技図柄当選乱数取得処理)に移行する。尚、ステップ1062でNoの場合には、次の処理(ステップ1100の補助遊技図柄当選乱数取得処理)に移行する。
Next, FIG. 10 is a flowchart of processing at the time of vibration error detection according to the subroutine of
次に、図11は、図9におけるステップ1100のサブルーチンに係る、補助遊技図柄当選乱数取得処理のフローチャートである。まず、ステップ1102で、補助遊技入球口入球判定手段1113は、補助遊技入球口2410に遊技球が入球(流入、通過)したか否かを判定する。ステップ1102でYesの場合、ステップ1104で、補助遊技乱数取得判定実行手段1123は、補助遊技図柄保留情報一時記憶手段1133aを参照し、保留球が上限(例えば4個)でないか否かを判定する。ステップ1104でYesの場合、ステップ1106で、補助遊技乱数取得判定実行手段1123は、補助遊技図柄当選乱数を取得する。次に、ステップ1108で、補助遊技図柄保留手段1133は、何個目の保留であるかという情報と共に、当該乱数を補助遊技図柄保留情報一時記憶手段1133aにセットする形で保留球を1加算し、次の処理(ステップ1300の電動役物駆動判定処理)に移行する。尚、ステップ1102及びステップ1104でNoの場合も、次の処理(ステップ1300の電動役物駆動判定処理)に移行する。
Next, FIG. 11 is a flowchart of the auxiliary game symbol winning random number acquisition process according to the subroutine of
次に、図12は、図9におけるステップ1200のサブルーチンに係る、電動役物駆動判定処理のフローチャートである。まず、ステップ1202で、電動役物開閉制御手段1160は、補助遊技関連情報一時記憶手段1193aを参照して、電動役物開放中フラグがオフであるか否かを判定する。ステップ1202でYesの場合、ステップ1204で、補助遊技図柄制御手段1153は、補助遊技関連情報一時記憶手段1193aを参照して、補助遊技図柄変動中フラグがオフであるか否かを判定する。ステップ1204でYesの場合、ステップ1206で、補助遊技内容決定手段1143は、補助遊技図柄保留情報一時記憶手段1133aにアクセスし、補助遊技図柄に関する保留球があるか否かを判定する。ステップ1206でYesの場合、ステップ1216で、補助遊技内容決定手段1143は、補助遊技状態一時記憶手段1193を参照して補助遊技側の遊技状態を取得すると共に、当該取得した補助遊技側の遊技状態及び当該保留球に基づく補助遊技図柄乱数に基づき停止図柄を決定して補助遊技図柄情報一時記憶手段1193bに一時記憶する。次に、ステップ1218で、補助遊技図柄変動時間管理手段1153aは、補助遊技側の遊技状態に基づき、補助遊技図柄変動管理用タイマ1153a−1に補助遊技図柄の変動時間に係る所定時間(例えば、時短遊技の場合には5秒、通常遊技の場合には30秒)をセットする。そして、ステップ1220で、補助遊技図柄制御手段1153は、補助遊技関連情報一時記憶手段1193a中の補助遊技図柄変動中フラグをオンにする。次に、ステップ1222で、補助遊技図柄保留手段1133は、補助遊技図柄に関する当該保留球を1減算した上で補助遊技図柄保留情報一時記憶手段1133aに記録されている保留情報を更新すると共に、補助遊技図柄制御手段1153は、補助遊技図柄変動管理用タイマ1153a−1をスタートした後、補助遊技図柄表示部2421上で補助遊技図柄の変動表示を開始する。次に、ステップ1224で、補助遊技図柄変動時間管理手段1153aは、補助遊技図柄変動管理用タイマ1153a−1を参照して、補助遊技図柄の変動時間に係る所定時間に到達したか否かを判定する。ステップ1224でYesの場合、ステップ1226で、補助遊技図柄制御手段1153は、補助遊技図柄情報一時記憶手段1193bを参照して補助遊技図柄の停止図柄を取得すると共に、当該取得した補助遊技図柄の停止図柄を補助遊技図柄表示部2421上で確定表示する。そして、ステップ1228で、補助遊技図柄制御手段1153は、補助遊技関連情報一時記憶手段1193a中の補助遊技図柄変動中フラグをオフにする。次に、ステップ1230で、条件判定手段1161は、当該補助遊技図柄の停止図柄が「当り」であるか否かを判定する。ステップ1230でYesの場合、ステップ1232で、電動役物開閉制御手段1160は、補助遊技側の遊技状態に基づき、開放タイマ1162に電動役物の開放時間に係る所定時間(例えば、時短遊技の場合には5秒、通常遊技の場合には0.5秒)をセットする。次に、ステップ1234で、電動役物開閉制御手段1160は、補助遊技関連情報一時記憶手段1193a中の電動役物開放中フラグをオンにする。そして、ステップ1236で、電動役物開閉制御手段1160は、第2主遊技始動口2110の電動役物2112を開放する。次に、ステップ1238で、電動役物開閉制御手段1160は、開放タイマ1162を参照して、電動役物の開放時間に係る所定時間に到達したか否かを判定する。ステップ1238でYesの場合、ステップ1240及びステップ1242で、電動役物開閉制御手段1160は、第2主遊技始動口2110の電動役物2112を閉鎖すると共に、補助遊技関連情報一時記憶手段1193a中の電動役物開放中フラグをオフにし、次の処理(ステップ1300の遊技内容決定乱数取得処理)に移行する。
Next, FIG. 12 is a flowchart of the electric accessory drive determination process according to the subroutine of
尚、ステップ1202でNoの場合にはステップ1238に移行し、ステップ1204でNoの場合にはステップ1224に移行し、ステップ1206、ステップ1224、ステップ1230及びステップ1238でNoの場合には次の処理(ステップ1300の遊技内容決定乱数取得処理)に移行する。
If NO in step 1202, the process proceeds to step 1238. If NO in
次に、図13は、図9におけるステップ1300のサブルーチンに係る、遊技内容決定乱数取得処理のフローチャートである。まず、ステップ1302で、第1主遊技始動口入球判定手段1111は、第1主遊技始動口2210の第1入球検出装置2211から第1主遊技始動口入球情報を受信したか否かを判定する。ステップ1302でYesの場合、ステップ1304で、第1主遊技乱数取得判定実行手段1121は、第1主遊技図柄保留情報一時記憶手段1131aを参照し、保留球が上限(例えば4個)でないか否かを判定する。ステップ1304でYesの場合、ステップ1306で、第1主遊技乱数取得判定実行手段1121は、遊技内容決定乱数(第1主遊技乱数)を取得する。次に、ステップ1312で、第1主遊技図柄保留手段1131は、当該遊技内容決定乱数を第1主遊技図柄保留情報一時記憶手段1131aに記憶する。次に、ステップ1313で、情報送信制御手段1300は、第1主遊技乱数が取得された旨の情報を送信する。次に、ステップ1314で、第2主遊技始動口入球判定手段1112は、第2主遊技始動口2110の第2入球検出装置2111から第2主遊技始動口入球情報を受信したか否かを判定する。ステップ1314でYesの場合、ステップ1316で、第2主遊技乱数取得判定実行手段1122は、第2主遊技図柄保留情報一時記憶手段1132aを参照し、保留球が上限(例えば4個)でないか否かを判定する。ステップ1316でYesの場合、ステップ1318で、第2主遊技乱数取得判定実行手段1122は、遊技内容決定乱数(第2主遊技乱数)を取得する。次に、ステップ1324で、第2主遊技図柄保留手段1132は、当該遊技内容決定乱数を第2主遊技図柄保留情報一時記憶手段1132aに記憶する。次に、ステップ1325で、情報送信制御手段1300は、第2主遊技乱数が取得された旨の情報を送信し、次の処理(ステップ1400の主遊技図柄表示処理)に移行する。尚、ステップ1302及びステップ1304でNoの場合にはステップ1314に移行し、ステップ1314及びステップ1316でNoの場合には次の処理(ステップ1400の主遊技図柄表示処理)に移行する。
Next, FIG. 13 is a flowchart of the game content determination random number acquisition process according to the subroutine of
次に、図14は、図9におけるステップ1400のサブルーチンに係る、主遊技図柄表示処理のフローチャートである。まず、ステップ1401で、主遊技図柄保留解除制御手段1154は、第2主遊技図柄保留情報一時記憶手段1132aを参照し、第2主遊技図柄の保留が存在していないか否かを確認する。ステップ1401でYesの場合、ステップ1400(2)で、主制御装置1000は、後述の第1主遊技図柄表示処理を実行し、次の処理(ステップ1500の特別遊技作動条件判定処理)に移行する。他方、ステップ1401でNoの場合、ステップ1400(1)で、主制御装置1000は、後述の第2主遊技図柄表示処理を実行し、次の処理(ステップ1500の特別遊技作動条件判定処理)に移行する。このように、本実施形態においては、第2主遊技図柄の保留球が存在する場合には、第1主遊技図柄の保留球の存在に係らず(たとえ入賞順序が第1主遊技図柄の保留の方が先でも)、第2主遊技図柄の保留消化を優先して実行するよう構成されているが、これには限定されない。
Next, FIG. 14 is a flowchart of main game symbol display processing according to the subroutine of
次に、図15は、図14におけるステップ1400(1){ステップ1400(2)}のサブルーチンに係る、第1主遊技図柄表示処理(第2主遊技図柄表示処理)のフローチャートである。まず、ステップ1402で、第1主遊技内容決定手段1141(第2主遊技内容決定手段1142)は、変動開始条件が成立しているか否かを判定する。ここで、この変動開始条件は、特別遊技中や図柄変動中でないことが条件となる。
Next, FIG. 15 is a flowchart of the first main game symbol display process (second main game symbol display process) according to the subroutine of step 1400 (1) {step 1400 (2)} in FIG. First, in
次に、ステップ1414で、第1主遊技内容決定手段1141(第2主遊技内容決定手段1142)は、第1主遊技図柄保留情報一時記憶手段1131a(第2主遊技図柄保留情報一時記憶手段1132a)に一時記憶されている、今回の図柄変動に係る遊技内容決定乱数を読み出す。次に、ステップ1403で、当否抽選手段1135は、各遊技状態に対応する第1主遊技用当否抽選テーブル1135b−1(第2主遊技用当否抽選テーブル1135b−3)を参照し、遊技内容決定乱数(当選乱数)に基づき、主遊技図柄当否抽選を実行する。そして、ステップ1417で、特別遊技移行決定手段1135aは、当該主遊技図柄当否抽選結果が当りか否かを判定する。ステップ1417でYesの場合、ステップ1418で、特別遊技移行決定手段1135aは、第1フラグ一時記憶手段1191a(第2フラグ一時記憶手段1192a)中の「当りフラグ」をオンにする。他方、ステップ1417でNoの場合には、ステップ1418をスキップする。
Next, in step 1414, the first main game content determination means 1141 (second main game content determination means 1142) is a first main game symbol hold information temporary storage means 1131a (second main game symbol hold information temporary storage means 1132a. ) Is temporarily stored, and the game content determination random number related to the current symbol variation is read out. Next, at
そして、ステップ1416で、第1主遊技内容決定手段1141(第2主遊技内容決定手段1142)は、各遊技状態に対応する第1主遊技内容決定用抽選テーブル1141a(第2主遊技内容決定用抽選テーブル1142a)を参照し、主遊技図柄当否抽選結果及び遊技内容決定乱数(例えば主遊技図柄決定乱数)に基づいて主遊技図柄に関する停止図柄を決定すると共に、遊技内容決定乱数(例えば変動態様決定乱数)に基づいて主遊技図柄の変動態様を決定し、これらを第1主遊技図柄情報一時記憶手段1191b(第2主遊技図柄情報一時記憶手段1192b)に一時記憶する。
In
次に、ステップ1419−1で、情報送信制御手段1300は、ステップ1416で決定した主遊技図柄に関する図柄情報(停止図柄情報、停止図柄の属性情報、変動態様情報等)及び現在の遊技状態をサブメイン制御基板2320側に送信する。次に、ステップ1419−2で、情報送信手段1300は、図柄変動表示開始指示情報をサブメイン制御基板2320側に送信する。次に、ステップ1420で、第1主遊技図柄変動時間管理手段1151a(第2主遊技図柄変動時間管理手段1152a)が、主遊技図柄の変動時間に係る所定時間(前記ステップ1416で決定した変動態様に係る変動時間)を第1主遊技図柄変動管理用タイマ1151a−1(第2主遊技図柄変動管理用タイマ1152a−1)にセットする。そして、ステップ1422で、第1主遊技図柄制御手段1151(第2主遊技図柄制御手段1152)は、第1主遊技図柄表示装置2130(第2主遊技図柄表示装置2230)の第1主遊技図柄表示部2131(第2主遊技図柄表示部2231)上で、第1主遊技図柄情報一時記憶手段1191b(第2主遊技図柄情報一時記憶手段1192b)に記憶された変動態様に従い、主遊技図柄の変動表示を開始する。次に、ステップ1446で、第1主遊技図柄制御手段1151(第2主遊技図柄制御手段1152)は、第1フラグ一時記憶手段1191a(第2フラグ一時記憶手段1192a)中の変動中フラグをオンする。そして、ステップ1434で、第1主遊技図柄変動時間管理手段1151a(第2主遊技図柄変動時間管理手段1152a)が、主遊技図柄の変動時間に係る所定時間に到達したか否かを判定する。ステップ1434でYesの場合、ステップ1437で、情報送信制御手段1300は、図柄確定表示指示情報をサブメイン制御基板2320側に送信する。次に、ステップ1438で、第1主遊技図柄制御手段1151(第2主遊技図柄制御手段1152)は、第1主遊技図柄表示装置2130(第2主遊技図柄表示装置2230)の第1主遊技図柄表示部2131(第2主遊技図柄表示部2231)上での主遊技図柄の変動表示を停止し、第1主遊技図柄情報一時記憶手段1191b(第2主遊技図柄情報一時記憶手段1192b)に記憶されている停止図柄を確定停止図柄として表示制御する。次に、ステップ1440で、第1主遊技図柄制御手段1151(第2主遊技図柄制御手段1152)は、第1フラグ一時記憶手段1191a(第2フラグ一時記憶手段1192a)中の変動中フラグをオフにする。そして、ステップ1442で、第1主遊技図柄変動時間管理手段1151a(第2主遊技図柄変動時間管理手段1152a)は、第1主遊技図柄変動管理用タイマ1151a−1(第2主遊技図柄変動管理用タイマ1152a−1)をリセットする。次に、ステップ1450で、主制御装置1000は、後述の特定遊技終了判定処理を実行し、次の処理(ステップ1500の特別遊技作動条件判定処理)に移行する。尚、ステップ1434でNoの場合には、次の処理(ステップ1500の特別遊技作動条件判定処理)に移行する。
Next, in step 1419-1, the information transmission control means 1300 subtracts the symbol information (stop symbol information, stop symbol attribute information, variation mode information, etc.) related to the main game symbol determined in
尚、ステップ1402でNoの場合には、ステップ1444で、第1主遊技図柄制御手段1151(第2主遊技図柄制御手段1152)は、第1フラグ一時記憶手段1191a(第2フラグ一時記憶手段1192a)を参照し、変動中フラグがオンであるか否かを判定する。ステップ1444でYesの場合にはステップ1434に移行し、ステップ1444でNoの場合には次の処理(ステップ1500の特別遊技作動条件判定処理)に移行する。
In the case of No in
次に、図16は、図15におけるステップ1450(1)及び(2)のサブルーチンに係る、特定遊技終了判定のフローチャートである。まず、ステップ1452で、特定遊技制御手段1180は、時短回数カウンタ1181aを参照して、時短回数カウンタ値が0よりも大きいか否かを判定する。ステップ1452でYesの場合、ステップ1454で、特定遊技制御手段1180は、時短回数カウンタ1181aの時短回数カウンタ値を1減算する。次に、ステップ1456で、特定遊技制御手段1180は、時短回数カウンタ1181aを参照して、時短回数が0であるか否かを判定する。ステップ1456でYesの場合、ステップ1460で、特定遊技制御手段1180は、第1フラグ一時記憶手段1191a中の時間短縮フラグ及び第2フラグ一時記憶手段1192a中の時間短縮フラグをオフにする。次に、ステップ1462で、特定遊技制御手段1180は、遊技状態一時記憶手段1190内の時短終了フラグをオンにし、次の処理(ステップ1500の特別遊技作動条件判定処理)に移行する。尚、ステップ1452及びステップ1456でNoの場合にも、次の処理(ステップ1500の特別遊技作動条件判定処理)に移行する。
Next, FIG. 16 is a flowchart of the specific game end determination according to the subroutine of steps 1450 (1) and (2) in FIG. First, in
次に、図17は、図9におけるステップ1500のサブルーチンに係る、特別遊技作動条件判定処理のフローチャートである。まず、ステップ1502で、条件判定手段1171は、第1フラグ一時記憶手段1191a(第2フラグ一時記憶手段1192a)を参照し、当りフラグがオンであるか否かを判定する。ステップ1502でYesの場合、ステップ1504で、条件判定手段1171は、第1主遊技図柄表示装置2130(第2主遊技図柄表示装置2230)の第1主遊技図柄表示部2131(第2主遊技図柄表示部2231)上に表示された主遊技図柄が所定態様で停止したか否かを判定する。ステップ1504でYesの場合、ステップ1505で、特別遊技内容決定手段1172は、当該所定態様に基づき、特別遊技内容参照テーブル1172a(前出の表参照)を参照することにより、当該特別遊技の内容をセットする。次に、ステップ1552及び1554で、特定遊技制御手段1180は、第1フラグ一時記憶手段1191a及び第2フラグ一時記憶手段1192a中の特定遊技フラグ(確率変動フラグ・時間短縮フラグ)を一旦オフにすると共に、時短回数カウンタ1181aをリセット(時短回数カウンタ値=0)する。そして、ステップ1506及びステップ1508で、条件判定手段1171は、特別遊技関連情報一時記憶手段1194中の特別遊技移行許可フラグをオンにすると共に、第1フラグ一時記憶手段1191a(第2フラグ一時記憶手段1192a)中の当りフラグをオフにし、次の処理(ステップ1600の特別遊技制御処理)に移行する。尚、ステップ1502及びステップ1504でNoの場合にも、次の処理(ステップ1600の特別遊技制御処理)に移行する。
Next, FIG. 17 is a flowchart of the special game operation condition determination process according to the subroutine of
次に、図18は、図9におけるステップ1600のサブルーチンに係る、特別遊技制御処理のフローチャートである。まず、ステップ1602で、特別遊技実行手段1173は、特別遊技関連情報一時記憶手段1194を参照し、特別遊技移行許可フラグがオンであるか否かを判定する。ステップ1602でYesの場合、ステップ1604及びステップ1606で、特別遊技実行手段1173は、特別遊技関連情報一時記憶手段1194内の特別遊技移行許可フラグをオフにすると共に特別遊技実行フラグをオンにする。次に、ステップ1608で、情報送信制御手段1300は、サブメイン制御基板2320側に特別遊技開始表示指示情報を送信し、ステップ1612に移行する。他方、ステップ1602でNoの場合、ステップ1610で、特別遊技実行手段1173は、特別遊技関連情報一時記憶手段1194を参照し、特別遊技実行フラグがオンであるか否かを判定する。そして、ステップ1610でYesの場合には、ステップ1612に移行する。尚、ステップ1610でNoの場合には、特別遊技実行手段1173は、特別遊技の許可が下りていないと判定し、次の処理(ステップ1700の賞球払出処理)に移行する。
Next, FIG. 18 is a flowchart of the special game control process according to the subroutine of
次に、ステップ1612で、特別遊技実行手段1173は、特別遊技関連情報一時記憶手段1194を参照し、ラウンド継続フラグがオンであるか否か、換言すれば、当該ラウンドが途中であるか否かを判定する。ステップ1612でYesの場合、即ち、当該ラウンドが途中である場合、以下で詳述するステップ1614〜1622の処理を行うことなく、ステップ1624に移行する。他方、ステップ1612でNoの場合、即ち、当該ラウンドの開始直前である場合、まず、ステップ1614で、特別遊技実行手段1173は、特別遊技関連情報一時記憶手段1194にセットした開放パターン(例えば、開放し続ける開放パターン、開閉を行うパターン)をセットする。次に、ステップ1616で、特別遊技実行手段1173は、特別遊技関連情報一時記憶手段1194内の入賞球カウンタをゼロクリアする。次に、ステップ1618で、特別遊技実行手段1173は、特別遊技関連情報一時記憶手段1194内のラウンド数カウンタに1を加算する。尚、特別遊技関連情報一時記憶手段1194に記憶されているラウンド数は、特別遊技開始直後(初期値)は0であり、以後ラウンドを重ねていく毎に1ずつインクリメントされる。次に、ステップ1620で、特別遊技実行手段1173は、特別遊技関連情報一時記憶手段1194内のラウンド継続フラグをオンにする。そして、ステップ1622で、特別遊技実行手段1173は、第1大入賞口2120の第1電動役物2122又は第2大入賞口2220の第2電動役物2222を駆動して第1大入賞口2120又は第2大入賞口2220を開放し、ステップ1624に移行する。
Next, in
次に、ステップ1624で、情報送信制御手段1300は、サブメイン制御基板2320側に現在の特別遊技中に係る遊技状態情報(例えば、現在のラウンド数や遊技球の入賞個数等)を送信する。そして、ステップ1626で、特別遊技実行手段1173は、特別遊技関連情報一時記憶手段1194を参照して当該ラウンドで所定球(例えば10球)の入賞球があったか否かを判定する。ステップ1626でYesの場合には、ステップ1630に移行する。他方、ステップ1626でNoの場合、ステップ1628で、特別遊技実行手段1173は、特別遊技用タイマ1174a(特に開放時間タイマ)を参照して大入賞口開放に係る所定時間が経過したか否かを判定する。ステップ1626でYesの場合にも、ステップ1630に移行し、ステップ1626でNoの場合には、次の処理(ステップ1700の賞球払出処理)に移行する。
Next, in step 1624, the information transmission control means 1300 transmits game state information (for example, the current number of rounds, the number of winning game balls, etc.) related to the current special game to the
次に、ステップ1630で、特別遊技実行手段1173は、第1大入賞口2120の第1電動役物2122又は第2大入賞口2220の第2電動役物2222の駆動を停止して第1大入賞口2120又は第2大入賞口2220を閉鎖する。そして、ステップ1632で、特別遊技実行手段1173は、特別遊技用タイマ1174a(特に開放時間タイマ)をリセットする。次に、ステップ1634で、特別遊技実行手段1173は、特別遊技関連情報一時記憶手段1194内のラウンド継続フラグをオフにする。次に、ステップ1636で、特別遊技実行手段1173は、特別遊技関連情報一時記憶手段1194を参照して、当該ラウンドが最終ラウンド(例えば、確率変動大当り及び時間短縮変動大当りの場合は15ラウンド、突然確率変動大当りの場合は2ラウンド)であるか否かを判定する。ステップ1636でYesの場合、ステップ1638で、特別遊技実行手段1173は、特別遊技関連情報一時記憶手段1194内の特別遊技実行フラグをオフにする。次に、ステップ1640で、情報送信制御手段1300は、サブメイン制御基板2320側に特別遊技終了信号を送信する。そして、ステップ1650で、遊技制御手段1100は、後述の特別遊技終了後の遊技状態決定処理を実行し、次の処理(ステップ1700の賞球払出処理)に移行する。尚、ステップ1636でNoの場合にも、次の処理(ステップ1700の賞球払出処理)に移行する。
Next, in
次に、図19は、図18におけるステップ1650のサブルーチンに係る、特別遊技終了後の遊技状態決定処理のフローチャートである。まず、ステップ1652で、特定遊技制御手段1180は、遊技状態一時記憶手段1191を参照し、今回の特別遊技が確率変動大当りであるか否かを判定する。ステップ1652でYesの場合、ステップ1654で、特定遊技制御手段1180は、遊技状態一時記憶手段1191内の確率変動フラグをオンにする。次に、ステップ1656で、特定遊技制御手段1180は、遊技状態一時記憶手段1191を参照し、今回の特別遊技が時間短縮変動有りであるか否かを判定する。ステップ1656でYesの場合、ステップ1658で、特定遊技制御手段1180は、遊技状態一時記憶手段1191を参照し、今回の特別遊技が時短回数制限有りであるか否かを判定する。ステップ1658でYesの場合、ステップ1660で、特定遊技制御手段1180は、時短回数カウンタ1181aに所定回数(本実施形態では、30回)をセットして、ステップ1664に移行する。他方、ステップ1658でNoの場合、ステップ1662で、特定遊技制御手段1180は、時短回数カウンタ1181aにカウンタ値として指定でき得る最大回数(例えば、65535回)をセットして、ステップ1664に移行する。次に、ステップ1664で、特定遊技制御手段1180は、補助遊技関連情報一時記憶手段1193内の時間短縮フラグをオンにし、次の処理(ステップ1700の賞球払出処理)に移行する。尚、ステップ1652でNoの場合には、ステップ1656へ移行し、ステップ1656でNoの場合には、次の処理(ステップ1700の賞球払出処理)に移行する。
Next, FIG. 19 is a flowchart of the game state determination process after the end of the special game according to the subroutine of
次に、図20〜図56を参照して、サブ基板側で実行される制御処理を説明する。まず、図20は、本実施形態に係るぱちんこ遊技機における、サブ基板(特にサブメイン制御基板2320)側のメインフローチャートである。ここで、図20(左)は、遊技機への電源投入時にのみ実行されるサブ基板側での初期処理であり、図20(右)は遊技機への電源投入後に繰り返し実行されるサブ基板側のメイン処理である。まず、図20(左)のフローチャートから説明すると、ステップ5000で、演出表示制御手段2320は、後述する電断復帰時初期処理を実行した後、図20(右)のメイン処理へ移行する。
Next, control processing executed on the sub-board side will be described with reference to FIGS. First, FIG. 20 is a main flowchart on the sub-board (particularly sub-main control board 2320) side in the pachinko gaming machine according to the present embodiment. Here, FIG. 20 (left) is an initial process on the sub board executed only when the power to the gaming machine is turned on, and FIG. 20 (right) is a sub board repeatedly executed after turning on the power to the gaming machine. Main processing. First, to explain from the flowchart of FIG. 20 (left), in
次に、図20(右)のメイン処理フローチャートについて説明する。まず、ステップ5200で、演出表示制御手段2320は、後述する可動体役物基本位置設定処理を実行する。次に、ステップ5400で、演出表示制御手段2320は、後述する演出ステージ決定処理を実行する。次に、ステップ5600で、演出表示制御手段2320は、後述する保留情報管理処理を実行する。次に、ステップ5700で、演出表示制御手段2320は、後述する装飾図柄表示内容決定処理を実行する。次に、ステップ5800で、演出表示制御手段2320は、後述する装飾図柄表示制御処理を実行する。次に、ステップ6000で、演出表示制御手段2320は、後述する特別遊技中表示制御処理を実行する。次に、ステップ6500で、演出表示制御手段2320は、後述する可動体役物位置監視処理を実行する。次に、ステップ7000で、演出表示制御手段2320は、後述する可動体役物エラー発生判定処理を実行する。次に、ステップ7500で、演出表示制御手段2320は、後述する可動体役物エラー報知制御処理を実行する。次に、ステップ7600で、演出表示制御手段2320は、後述する可動体役物エラー報知処理を実行する。次に、ステップ8000で、演出表示制御手段2320は、後述する可動体役物動作可否・内容決定処理を実行する。次に、ステップ9000で、演出表示制御手段2320は、後述する可動体役物動作制御処理を実行する。次に、ステップ4000で、演出表示制御手段2320は、後述するモータ・ソレノイド励磁開始制御処理を実行する。次に、ステップ4500で、演出表示制御手段2320は、後述するモータ・ソレノイド励磁終了制御処理を実行する。次に、ステップ3000で、演出表示制御手段2320は、後述する長期通電異常監視制御処理を実行し、本処理フローの先頭に戻る処理を繰り返す。以下、各サブルーチンを詳述する。
Next, the main process flowchart of FIG. 20 (right) will be described. First, in
まず、図21は、図20でのステップ5000のサブルーチンに係る、電断復帰時初期処理のフローチャートである。まず、ステップ5002で、電源立ち上げ時処理制御手段2326は、サブメイン制御基板2320側にて電源投入情報を受信したか否かを判定する。ここで、電源投入情報とは、メイン基板が電断状態から復帰したことを、復帰時の状況を示すコマンドに基づき把握できる情報であり、本実施例ではメイン基板から送信されてくる電断復帰コマンドが相当する。ステップ5002でYesの場合、ステップ5004で、電源立ち上げ時処理制御手段2326は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A初期動作未完了フラグ、可動体役物B初期動作未完了フラグ、可動体役物C初期動作未完了フラグ、可動体役物D初期動作未完了フラグを全てオンにして、次の処理(サブ側メインフロー)に移行する。ここで、本実施形態では、可動体役物A、可動体役物B、可動体役物C及び可動体役物Dの4種類の可動体役物を有しているため、可動体役物A〜Dや可動体役物A(C)といった記載方法により適宜記載を省略することがある。また、可動体役物A〜D初期動作未完了フラグとは、後述する可動体役物A〜Dの夫々に係る初期動作実行処理が未完了である場合にオンとなるフラグであり、当該初期動作実行処理が完了した場合にオフとなるフラグである。尚、ステップ5002でNoの場合には、再びステップ5002を実行することで、電源投入情報の受信待ちループ処理を実行することとなる。
First, FIG. 21 is a flowchart of the power failure return initial processing according to the subroutine of
次に、図22は、図20でのステップ5200のサブルーチンに係る、可動体役物基本位置設定処理のフローチャートである。まず、ステップ5202で、可動体役物基本位置決定手段2325e−1は、基本位置決定用参照テーブル2325e−1−1を参照して、所定の設定タイミングに到達したか否かを判定する。ステップ5202でYesの場合、ステップ5204で、可動体役物基本位置決定手段2325e−1は、基本位置決定用参照テーブル2325e−1−1を参照して、現在のメイン側遊技状態及びサブ側遊技状態に基づき、当該設定タイミングにおける可動体役物A〜Dの基本停止位置を決定すると共に、当該決定内容を可動体役物動作状態情報一時記憶手段2325dに一時記憶し、次の処理(ステップ5400の演出ステージ決定処理)に移行する。尚、ステップ5202でNoの場合には、次の処理(ステップ5400の演出ステージ決定処理)に移行する。
Next, FIG. 22 is a flowchart of the movable body accessory basic position setting process according to the subroutine of
次に、図23は、図20でのステップ5400のサブルーチンに係る、演出ステージ決定処理のフローチャートである。まず、ステップ5410で、サブ側遊技状態制御手段2327は、メイン側情報一時記憶手段2321aを参照して、メイン側の遊技状態が確率変動遊技状態へ移行したか否かを判定する。ステップ5410でYesの場合、ステップ5420で、サブ側遊技状態制御手段2327は、サブ側の遊技状態である確変ステージAへの移行条件を充足(例えば、所定の移行抽選確率に当選)したか否かを判定する。ステップ5420でYesの場合、ステップ5422で、サブ側遊技状態制御手段2327は、演出一般情報一時記憶手段2324内のサブ側遊技状態種別に確変ステージAを表す種別情報(演出モード)をセットする。次に、ステップ5424で、サブ側遊技状態制御手段2327は、演出表示手段2310を駆使して演出表示装置2140上に確変ステージAに対応した背景動画像を表示し、次の処理(ステップ5600の保留情報管理処理)に移行する。他方、ステップ5420でNoの場合、ステップ5426で、サブ側遊技状態制御手段2327は、演出一般情報一時記憶手段2324内のサブ側遊技状態種別に確変ステージBを表す種別情報をセットする。次に、ステップ5428で、サブ側遊技状態制御手段2327は、演出表示手段2310を駆使して演出表示装置2140上に確変ステージBに対応した背景動画像を表示し、次の処理(ステップ5600の保留情報管理処理)に移行する。
Next, FIG. 23 is a flowchart of effect stage determination processing according to the subroutine of
他方、ステップ5410でNoの場合、ステップ5440で、サブ側遊技状態制御手段2327は、メイン側情報一時記憶手段2321aを参照して、メイン側の遊技状態が非確率変動遊技状態へ移行したか否かを判定する。ステップ5440でYesの場合、ステップ5450で、サブ側遊技状態制御手段2327は、サブ側の遊技状態である通常ステージAへの移行条件を充足(例えば、所定の移行抽選確率に当選)したか否かを判定する。ステップ5450でYesの場合、ステップ5452で、サブ側遊技状態制御手段2327は、演出一般情報一時記憶手段2324内のサブ側遊技状態種別に通常ステージAを表す種別情報(演出モード)をセットする。次に、ステップ5454で、サブ側遊技状態制御手段2327は、演出表示手段2310を駆使して演出表示装置2140上に通常ステージAに対応した背景動画像を表示し、次の処理(ステップ5600の保留情報管理処理)に移行する。他方、ステップ5450でNoの場合、ステップ5456で、サブ側遊技状態制御手段2327は、演出一般情報一時記憶手段2324内のサブ側遊技状態種別に通常ステージBを表す種別情報をセットする。次に、ステップ5458で、サブ側遊技状態制御手段2327は、演出表示手段2310を駆使して演出表示装置2140上に通常ステージBに対応した背景動画像を表示し、次の処理(ステップ5600の保留情報管理処理)に移行する。尚、ステップ5440でNoの場合には、次の処理(ステップ5600の保留情報管理処理)に移行する。
On the other hand, in the case of No in
次に、図24は、図20でのステップ5600のサブルーチンに係る、保留情報管理処理のフローチャートである。まず、ステップ5602で、装図保留情報表示制御手段2323は、メイン側情報一時記憶手段2321aを参照し、主制御装置側から新たな保留関連情報(第1主遊技図柄又は第2主遊技図柄に係る保留情報)を受信したか否かを判定する。ステップ5602でYesの場合、ステップ5604で、装図保留情報表示制御手段2323は、装図保留情報一時記憶手段2323a内の装図保留カウンタ(第1主遊技用が最大4個、第2主遊技用が最大4個)に「1」を加算し、次の処理(ステップ5700の装飾図柄表示内容決定処理)に移行する。他方、ステップ5602でNoの場合、ステップ5606で、演出表示制御手段2320は、メイン側情報一時記憶手段2321aを参照し、主制御装置側から図柄変動表示開始指示情報を受信したか否かを判定する。ステップ5606でYesの場合、ステップ5608で、演出表示制御手段2320は、装図表示関連情報一時記憶手段2322cのフラグ領域にアクセスし、図柄内容決定許可フラグをオンにし、次の処理(ステップ5700の装飾図柄表示内容決定処理)に移行する。尚、ステップ5606でNoの場合には、次の処理(ステップ5700の装飾図柄表示内容決定処理)に移行する。
Next, FIG. 24 is a flowchart of the hold information management process according to the subroutine of
次に、図25は、図20でのステップ5700のサブルーチンに係る、装飾図柄表示内容決定処理のフローチャートである。まず、ステップ5702で、装図表示内容決定手段2322aは、装図表示関連情報一時記憶手段2322cのフラグエリアを参照し、図柄内容決定許可フラグがオンであるか否かを判定する。ステップ5702でYesの場合、ステップ5704で、装図表示内容決定手段2322aは、装図表示関連情報一時記憶手段2322cのフラグエリア内の図柄内容決定許可フラグをオフにする。次に、ステップ5706で、装図表示内容決定手段2322aは、メイン側情報一時記憶手段2321a内に一時記憶されたメイン側からの図柄情報(主遊技図柄に係る停止図柄・変動態様)を取得する。次に、ステップ5708で、装図特殊停止図柄内容決定手段2322dは、主遊技図柄に係る停止図柄と変動態様とに基づき、両者が整合しているか否かを判定する。ここで、「両者が整合」しているとは、例えば、主遊技図柄に係る停止図柄が当り時に選択され得るものであり、且つ主遊技図柄に係る変動態様が当り時に選択され得るものであった場合のことを意味している。他方、「両者が不整合」しているとは、例えば、主遊技図柄に係る停止図柄が当り時に選択され得るものであり、且つ主遊技図柄に係る変動態様がハズレ時に選択され得るものであった場合のことを意味している。ステップ5708でYesの場合、ステップ5712で、装図特殊停止図柄内容決定手段2322dは、装図表示関連情報一時記憶手段2322c内の主制御送信コマンドエラーフラグをオフにし、ステップ5730に移行する。他方、ステップ5708でNoの場合、ステップ5714で、装図特殊停止図柄内容決定手段2322dは、装図表示関連情報一時記憶手段2322c内の主制御送信コマンドエラーフラグをオンにし、ステップ5730に移行する。
Next, FIG. 25 is a flowchart of the decorative symbol display content determination process according to the subroutine of
尚、本実施形態では、主遊技図柄に係る停止図柄と変動態様とに基づき、両者が整合しているか否か、換言すると、主制御基板1000側から送信された情報が正常であるか否かを判定しているが、これには限定されない。その場合には、例えば、主制御基板1000とサブメイン制御基板2320との基板間の接続において、断線・短絡が発生しているか否かを確認するための特殊なコマンドを主制御基板1000側から送信し、サブメイン制御基板2320側で正常に受信したか否かに基づき判定する例を挙げることができる。
In the present embodiment, based on the stop symbol and the variation mode relating to the main game symbol, whether or not both are matched, in other words, whether the information transmitted from the
次に、ステップ5730で、装図表示内容決定手段2322aは、装図表示関連情報一時記憶手段2322c内の主制御送信コマンドエラーフラグがオフであるか否かを判定する。ステップ5730でYesの場合、ステップ5732で、装図表示内容決定手段2322aは、主遊技図柄に係る停止図柄が当り図柄であるか否かを判定する。ステップ5732でYesの場合、ステップ5734で、装図表示内容決定手段2322aは、主遊技図柄に係る停止図柄に基づき装図変動内容決定用抽選テーブル2322a−1を参照して、装飾図柄の停止図柄として当り出目(例えば、「777」等の数字の三つ揃い)を決定して装図表示関連情報一時記憶手段2322cに一時記憶する。次に、ステップ5736で、装図表示内容決定手段2322aは、主遊技図柄に係る変動態様及び演出一般情報一時記憶手段2324に一時記憶されているサブ側の遊技状態(演出モード)に基づき、装図変動内容決定用抽選テーブル2322a−1を参照して、装飾図柄の変動態様を決定して装図表示関連情報一時記憶手段2322cに一時記憶する。次に、ステップ5738で、装図表示内容決定手段2322aは、装図表示関連情報一時記憶手段2322c内の図柄変動許可フラグをオンにし、次の処理(ステップ5800の装飾図柄表示制御処理)に移行する。尚、ステップ5702でNoの場合には、次の処理(ステップ5800の装飾図柄表示制御処理)に移行する。
Next, in
他方、ステップ5732でNoの場合、ステップ5740で、装図表示内容決定手段2322aは、主遊技図柄に係る停止図柄に基づき装飾図柄の停止図柄としてハズレ出目(例えば、「134」等の数字のバラケ目)をランダムに決定して装図表示関連情報一時記憶手段2322cに一時記憶する。次に、ステップ5742で、装図表示内容決定手段2322aは、装図表示関連情報一時記憶手段2322cに一時記憶されている装飾図柄の停止出目と特殊停止図柄内容決定用参照テーブル2322d−1内に一時記憶されている装飾図柄の停止出目とを比較して、同一の出目でないか否かを判定する。ステップ5742でYesの場合には、ステップ5736に移行し、ステップ5742でNoの場合には、ステップ5740に移行する。即ち、当該処理においてランダムに決定した装飾図柄の停止ハズレ出目は、特殊停止図柄内容決定用参照テーブル2322d−1内に一時記憶されている装飾図柄の停止出目とは異なる停止出目となることが担保されることとなる。
On the other hand, in the case of No in
他方、ステップ5730でNoの場合、ステップ5750で、装図特殊停止図柄内容決定手段2322dは、特殊停止図柄内容決定用参照テーブル2322d−1内に一時記憶されている停止出目の何れかを装飾図柄の停止出目として決定して装図表示関連情報一時記憶手段2322cに一時記憶する。次に、ステップ5752で、装図特殊停止図柄内容決定手段2322dは、主遊技図柄に係る変動態様に基づき特殊変動態様を決定して装図表示関連情報一時記憶手段2322cに一時記憶する。ここで、特殊変動態様の態様としては特に限定されないが、本処理が実行される状況下では、主遊技図柄に係る情報の信頼性が著しく低下しているため、非リーチとなるような変動態様とすることで遊技者に与えるインパクトを低減させるよう構成することが好適である。次に、ステップ5754で、装図特殊停止図柄内容決定手段2322dは、装図表示関連情報一時記憶手段2322c内の主制御送信コマンドエラーフラグをオフにし、ステップ5738に移行する。
On the other hand, in the case of No in
次に、図26は、図20でのステップ5800のサブルーチンに係る、装飾図柄表示制御処理のフローチャートである。まず、ステップ6704で、装飾図柄表示制御手段2322は、装図表示関連情報一時記憶手段2322cのフラグエリアを参照し、図柄変動許可フラグがオンであるか否かを判定する。ステップ5804でYesの場合、ステップ5808で、装飾図柄表示制御手段2322は、装図表示関連情報一時記憶手段2322cのフラグエリア内の図柄変動許可フラグをオフにする。次に、ステップ5809で、装飾図柄表示制御手段2322は、演出一般情報一時記憶手段2324内の可動体役物演出動作可否決定許可フラグをオンにする。ここで、可動体役物演出動作可否決定許可フラグとは、装飾図柄の変動開始・変動終了と連動して実行される可動体役物の演出動作に係るフラグであり、後述するように、当該フラグがオンとなることで可動体役物の演出動作の実行可否が決定されることとなる。次に、ステップ5810で、装飾図柄表示制御手段2322は、装図表示関連情報一時記憶手段2322c内に一時記憶された装飾図柄の変動態様に係る決定内容に基づき、演出表示装置2410上で装飾図柄の変動表示を開始し、ステップ5830に移行する。尚、ステップ5804でNoの場合には、ステップ5830に移行する。
Next, FIG. 26 is a flowchart of the decorative symbol display control process according to the subroutine of
次に、ステップ5830で、装飾図柄表示制御手段2322は、メイン側情報一時記憶手段2321aを参照し、メイン側から図柄確定表示指示情報を受信したか否かを判定する。ステップ5830でYesの場合、ステップ5832で、装飾図柄表示制御手段2322は、装図表示関連情報一時記憶手段2322c内に一時記憶された装飾図柄の停止図柄(停止出目)に係る決定内容に基づき、装飾図柄の停止図柄を確定表示し、次の処理(ステップ6000の特別遊技中表示制御処理)に移行する。尚、ステップ5830でNoの場合には、次の処理(ステップ6000の特別遊技中表示制御処理)に移行する。ここで、ステップ5830においては、装飾図柄の停止図柄(停止出目)が決定されていない状況下でメイン側から図柄確定表示指示情報を受信することがある。このような状況は、例えば、メイン側からの図柄変動表示開始指示情報の受信失敗等の何らかの不具合に起因して発生する。その場合には、装飾図柄の停止図柄として、例えば、「XXX」等の数字図柄ではない図柄や、特殊停止図柄内容決定用参照テーブル2322d−1内に一時記憶されている出目等を確定表示するよう構成しておくことで、当該不具合を速やかに報知することが可能となる。
Next, in step 5830, the decorative symbol display control means 2322 refers to the main side information temporary storage means 2321a, and determines whether or not the symbol fixed display instruction information has been received from the main side. In the case of Yes in step 5830, in
次に、図27は、図20でのステップ6000のサブルーチンに係る、特別遊技中表示制御処理のフローチャートである。まず、ステップ6002で、演出表示制御手段2320は、演出一般情報一時記憶手段2324のフラグエリアを参照し、特別遊技中フラグがオフであるか否かを判定する。ステップ6002でYesの場合、ステップ6004で、演出表示制御手段2320は、メイン側情報一時記憶手段2321aを参照し、メイン側から特別遊技開始表示指示情報を受信したか否かを判定する。ステップ6004でYesの場合、ステップ6006及びステップ6008で、演出表示制御手段2320は、演出一般情報一時記憶手段2324のフラグエリア内の特別遊技中フラグをオンにすると共に、演出表示装置2140上で大当り開始表示を行う。次に、ステップ6010で、サブ側遊技状態制御手段2327は、演出一般情報一時記憶手段2324内のサブ側遊技状態種別に特別遊技中を表す種別情報(演出モード)をセットし、ステップ6012に移行する。尚、ステップ6002でNoの場合には、ステップ6012に移行する。
Next, FIG. 27 is a flowchart of the display control processing during special game according to the subroutine of
次に、ステップ6012で、演出表示制御手段2320は、演出表示装置2140上で、メイン側から逐次送信されている遊技情報に基づき、ラウンド数と入賞個数を逐次表示する(確率変動大当り又は時間短縮変動大当りの場合のみ表示する)。ここで、突然確率変動大当り及び小当りである場合には、ラウンド数表示をすると、今回の当りが「突然確率変動大当り」及び「小当り」のいずれであるかが遊技者に分かってしまうので、これらの当りの場合には、当該処理においてラウンド数表示等を実行しない。次に、ステップ6014で、演出表示制御手段2320は、メイン側情報一時記憶手段2321aを参照し、メイン側から特別遊技終了表示指示情報を受信したか否かを判定する。ステップ6014でYesの場合、ステップ6016で、演出表示制御手段2320は、演出表示装置2140上で、大当り終了表示を行う。次に、ステップ6018で、演出表示制御手段2320は、演出一般情報一時記憶手段2324のフラグエリア内の特別遊技中フラグをオフにし、次の処理(ステップ6500の可動体役物位置監視処理)に移行する。尚、ステップ6004及びステップ6014でNoの場合には、次の処理(ステップ6500の可動体役物位置監視処理)に移行する。
Next, in step 6012, the effect display control means 2320 sequentially displays the number of rounds and the number of winnings on the
次に、図28は、図20でのステップ6500のサブルーチンに係る、可動体役物位置監視処理のフローチャートである。まず、ステップ6502で、可動体役物現在位置検出手段2325e−2は、位置センサA〜Dから送信される位置情報に基づき、可動体役物A〜Dに係る現時点での位置情報(現在位置情報)を取得して可動体役物動作状態情報一時記憶手段2325dに一時記憶し、次の処理(ステップ7000の可動体役物エラー発生判定処理)に移行する。
Next, FIG. 28 is a flowchart of the movable object position monitoring process according to the subroutine of
次に、図29は、図20でのステップ7000のサブルーチンに係る、可動体役物エラー発生判定処理のフローチャートである。まず、ステップ7002で、可動体役物位置整合性確認手段2325e−2は、位置整合性確認内容決定用参照テーブル2325e−2−1を参照して、所定の位置整合性確認タイミングに到達したか否かを判定する。ステップ7002でYesの場合、ステップ7004で、可動体役物位置整合性確認手段2325e−2は、位置整合性確認内容決定用参照テーブル2325e−2−1を参照して、当該確認タイミングの時点において可動体役物A〜Dが存在すべき位置情報(予定位置情報)を導出して可動体役物動作状態情報一時記憶手段2325dに一時記憶する。次に、ステップ7006で、可動体役物位置整合性確認手段2325e−2は、可動体役物動作状態情報一時記憶手段2325dに一時記憶されている可動体役物A〜Dの現在位置情報(図28のステップ6502で一時記憶した位置情報)と予定位置情報(ステップ7004で一時記憶した位置情報)とを比較し、可動体役物A〜Dの内に現在位置情報と予定位置情報とが異なるものがあるか否かを判定する。ステップ7006でYesの場合、ステップ7008で、可動体役物位置整合性確認手段2325e−2は、当該現在位置情報と予定位置情報とが異なる可動体役物に係るフラグである可動体役物動作状態情報一時記憶手段2325d内の可動体役物A〜Dエラー回数加算フラグをオンにする。ここで、可動体役物A〜Dエラー回数加算フラグがオンとなった可動体役物においては、後述する可動体役物に係るエラー報知制御処理が実行されることとなる。次に、ステップ7010で、可動体役物位置整合性確認手段2325e−2は、当該現在位置情報と予定位置情報とが異なる可動体役物に係るフラグである可動体役物動作状態情報一時記憶手段2325d内の可動体役物A〜Dエラー解消処理未完了フラグをオンにし、次の処理(ステップ7500の可動体役物エラー報知制御処理)に移行する。ここで、可動体役物A〜Dエラー解消処理未完了フラグがオンとなった可動体役物においては、後述する可動体役物に係るエラー解消動作(リトライ動作)制御処理が実行されることとなる。尚、ステップ7002又はステップ7006でNoの場合には、次の処理(ステップ7500の可動体役物エラー報知制御処理)に移行する。
Next, FIG. 29 is a flowchart of the movable body accessory error occurrence determination process according to the subroutine of
次に、図30は、図20でのステップ7500のサブルーチンに係る、可動体役物エラー報知制御処理のフローチャートである。まず、ステップ7502で、可動体役物エラー報知制御手段2325e−4は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A〜Dエラー回数加算フラグの内の何れのフラグがオンであるかを判定し、当該判定結果に基づき異なる処理を実行する。ここで、当該判定の実行に際しては、「可動体役物Aエラー回数加算フラグ」、「可動体役物Bエラー回数加算フラグ」、「可動体役物Cエラー回数加算フラグ」、「可動体役物Dエラー回数加算フラグ」の順に実行する。尚、何れのフラグもオンでない場合には、次の処理(ステップ7600の可動体役物エラー報知処理)に移行する。
Next, FIG. 30 is a flowchart of the movable body accessory error notification control process according to the subroutine of
次に、ステップ7502で「可動体役物Aエラー回数加算フラグ」がオンである場合、ステップ7520で、可動体役物エラー報知制御手段2325e−4は、可動体役物毎動作異常累積カウンタ2325e−4−1内の動作異常累積カウンタAのカウンタ値に1を加算(インクリメント)する。次に、ステップ7521で、可動体役物エラー報知制御手段2325e−4は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Aエラー回数加算フラグをオフにする。次に、ステップ7522で、可動体役物エラー報知制御手段2325e−4は、可動体役物毎動作異常累積カウンタ2325e−4−1内の動作異常累積カウンタAのカウンタ値が所定数A(例えば、3回)以上であるか否かを判定する。ステップ7522でYesの場合、ステップ7524で、可動体役物エラー報知制御手段2325e−4は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A動作エラー報知フラグをオンにする。次に、ステップ7526で、可動体役物エラー報知制御手段2325e−4は、可動体役物毎動作異常累積カウンタ2325e−4−1内の動作異常累積カウンタAのカウンタ値をゼロクリアし、次の処理(ステップ7600の可動体役物エラー報知処理)に移行する。尚、ステップ7522でNoの場合には、次の処理(ステップ7600の可動体役物エラー報知処理)に移行する。
Next, when the “movable body accessory A error count addition flag” is ON in
次に、ステップ7502で「可動体役物Bエラー回数加算フラグ」がオンである場合、ステップ7540で、可動体役物エラー報知制御手段2325e−4は、可動体役物毎動作異常累積カウンタ2325e−4−1内の動作異常累積カウンタBのカウンタ値に1を加算(インクリメント)する。次に、ステップ7541で、可動体役物エラー報知制御手段2325e−4は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Bエラー回数加算フラグをオフにする。次に、ステップ7542で、可動体役物エラー報知制御手段2325e−4は、可動体役物毎動作異常累積カウンタ2325e−4−1内の動作異常累積カウンタBのカウンタ値が所定数B(例えば、3回)以上であるか否かを判定する。ステップ7542でYesの場合、ステップ7544で、可動体役物エラー報知制御手段2325e−4は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物B動作エラー報知フラグをオンにする。次に、ステップ7546で、可動体役物エラー報知制御手段2325e−4は、可動体役物毎動作異常累積カウンタ2325e−4−1内の動作異常累積カウンタBのカウンタ値をゼロクリアし、次の処理(ステップ7600の可動体役物エラー報知処理)に移行する。尚、ステップ7542でNoの場合には、次の処理(ステップ7600の可動体役物エラー報知処理)に移行する。
Next, when the “movable body accessory B error count addition flag” is ON in
次に、ステップ7502で「可動体役物Cエラー回数加算フラグ」がオンである場合、ステップ7560で、可動体役物エラー報知制御手段2325e−4は、可動体役物毎動作異常累積カウンタ2325e−4−1内の動作異常累積カウンタCのカウンタ値に1を加算(インクリメント)する。次に、ステップ7561で、可動体役物エラー報知制御手段2325e−4は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Cエラー回数加算フラグをオフにする。次に、ステップ7562で、可動体役物エラー報知制御手段2325e−4は、可動体役物毎動作異常累積カウンタ2325e−4−1内の動作異常累積カウンタCのカウンタ値が所定数C(例えば、3回)以上であるか否かを判定する。ステップ7562でYesの場合、ステップ7564で、可動体役物エラー報知制御手段2325e−4は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物C動作エラー報知フラグをオンにする。次に、ステップ7566で、可動体役物エラー報知制御手段2325e−4は、可動体役物毎動作異常累積カウンタ2325e−4−1内の動作異常累積カウンタCのカウンタ値をゼロクリアし、次の処理(ステップ7600の可動体役物エラー報知処理)に移行する。尚、ステップ7562でNoの場合には、次の処理(ステップ7600の可動体役物エラー報知処理)に移行する。
Next, when the “movable body accessory C error count addition flag” is ON in
次に、ステップ7502で「可動体役物Dエラー回数加算フラグ」がオンである場合、ステップ7580で、可動体役物エラー報知制御手段2325e−4は、可動体役物毎動作異常累積カウンタ2325e−4−1内の動作異常累積カウンタDのカウンタ値に1を加算(インクリメント)する。次に、ステップ7581で、可動体役物エラー報知制御手段2325e−4は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Dエラー回数加算フラグをオフにする。次に、ステップ7582で、可動体役物エラー報知制御手段2325e−4は、可動体役物毎動作異常累積カウンタ2325e−4−1内の動作異常累積カウンタDのカウンタ値が所定数D(例えば、3回)以上であるか否かを判定する。ステップ7582でYesの場合、ステップ7584で、可動体役物エラー報知制御手段2325e−4は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物D動作エラー報知フラグをオンにする。次に、ステップ7586で、可動体役物エラー報知制御手段2325e−4は、可動体役物毎動作異常累積カウンタ2325e−4−1内の動作異常累積カウンタDのカウンタ値をゼロクリアし、次の処理(ステップ7600の可動体役物エラー報知処理)に移行する。尚、ステップ7582でNoの場合には、次の処理(ステップ7600の可動体役物エラー報知処理)に移行する。
Next, when the “movable body accessory D error count addition flag” is ON in
尚、可動体役物A〜D動作エラー報知フラグがオンとなった場合には、後述するように、当該オンとなった可動体役物に係るエラー報知が実行されることとなる。ここで、所定数A〜Dの設定数には特に限定されないが、可動体役物の構造や使用頻度に基づき、適当な値を設定しておくことで、夫々の可動体役物の耐久性を考慮した上でのエラー報知実行が可能となるのである。 When the movable body accessory A to D operation error notification flag is turned on, as described later, an error notification related to the turned movable body accessory is executed. Here, the set number of the predetermined number A to D is not particularly limited, but by setting an appropriate value based on the structure and frequency of use of the movable body accessory, the durability of each movable body accessory It is possible to execute error notification in consideration of the above.
次に、図31は、図20でのステップ7600のサブルーチンに係る、可動体役物エラー報知処理のフローチャートである。まず、ステップ7602で、可動体役物エラー報知制御手段2325e−4は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A〜D動作エラー報知フラグの何れかがオンであるか否かを判定する。ステップ7602でYesの場合、ステップ7604で、可動体役物エラー報知制御手段2325e−4は、可動体役物B動作エラー報知フラグ又は可動体役物D動作エラー報知フラグの何れかがオンであるか否かを判定する。ステップ7604でYesの場合、ステップ7606で、可動体役物エラー報知制御手段2325e−4は、可動体役物エラー報知手段(表ユニット対応)232−31上にて、遊技盤表ユニット232−100に設置されている可動体役物に異常が発生した旨を報知する。次に、ステップ7608で、可動体役物エラー報知制御手段2325e−4は、可動体役物B動作エラー報知フラグがオンであるか否かを判定する。ステップ7608でYesの場合、ステップ7610で、可動体役物エラー報知制御手段2325e−4は、可動体役物エラー報知手段(表ユニット対応)232−31上にて、遊技盤面左側に設置されている可動体役物に異常が発生した旨を報知する。次に、ステップ7612で、可動体役物エラー報知制御手段2325e−4は、可動体役物D動作エラー報知フラグがオンであるか否かを判定する。ステップ7612でYesの場合、ステップ7614で、可動体役物エラー報知制御手段2325e−4は、可動体役物エラー報知手段(表ユニット対応)232−31上にて、遊技盤面右側に設置されている可動体役物に異常が発生した旨を報知し、ステップ7616に移行する。尚、ステップ7608でNoの場合には、ステップ7612に移行し、ステップ7604又はステップ7612でNoの場合には、ステップ7616に移行する。
Next, FIG. 31 is a flowchart of the movable body accessory error notification process according to the subroutine of
次に、ステップ7616で、可動体役物エラー報知制御手段2325e−4は、可動体役物A動作エラー報知フラグ又は可動体役物C動作エラー報知フラグの何れかがオンであるか否かを判定する。ステップ7616でYesの場合、ステップ7618で、可動体役物エラー報知制御手段2325e−4は、可動体役物エラー報知手段(裏ユニット対応)232−32上にて、遊技盤裏ユニット232−200に設置されている可動体役物に異常が発生した旨を報知する。次に、ステップ7620で、可動体役物エラー報知制御手段2325e−4は、可動体役物A動作エラー報知フラグがオンであるか否かを判定する。ステップ7620でYesの場合、ステップ7622で、可動体役物エラー報知制御手段2325e−4は、可動体役物エラー報知手段(裏ユニット対応)232−32上にて、遊技盤面上側に設置されている可動体役物に異常が発生した旨を報知する。次に、ステップ7624で、可動体役物エラー報知制御手段2325e−4は、可動体役物C動作エラー報知フラグがオンであるか否かを判定する。ステップ7624でYesの場合、ステップ7626で、可動体役物エラー報知制御手段2325e−4は、可動体役物エラー報知手段(裏ユニット対応)232−32上にて、遊技盤面右側に設置されている可動体役物に異常が発生した旨を報知し、次の処理(ステップ8000の可動体役物動作可否・内容決定処理)に移行する。尚、ステップ7620でNoの場合には、ステップ7624に移行し、ステップ7602、ステップ7616又はステップ7624でNoの場合には、次の処理(ステップ8000の可動体役物動作可否・内容決定処理)に移行する。
Next, in step 7616, the movable body accessory error notification control means 2325e-4 determines whether either the movable body accessory A operation error notification flag or the movable body accessory C operation error notification flag is ON. judge. In the case of Yes in step 7616, in
尚、本実施形態では、前述のように、可動体役物エラー報知手段(表ユニット対応)232−31及び可動体役物エラー報知手段(裏ユニット対応)232−32は、複数のLEDによって構成されており、LEDの点灯箇所或いは点灯箇所の組合せによって、何れのユニットの何れの箇所に設置された可動体役物に係るエラーであるのかが把握容易となるよう構成されている。そのため、本処理フローにおいて、可動体役物毎にエラー報知態様を切り分けることで、可動体役物毎に異なるエラー報知態様にて報知できるよう構成されているのである。また、可動体役物エラー報知手段(表ユニット対応)232−31及び可動体役物エラー報知手段(裏ユニット対応)232−32は、当該エラー報知用の専用LEDを設けることに限定されず、遊技盤面に設けられた他の遊技効果ランプ190を代用(代用するランプの位置には限定されず、視認容易な位置であっても、視認しづらい位置であってもよい)するよう構成してもよい。このように構成することで、可動体役物エラー報知用のLEDを別途設ける必要がなくなるため、開発コストを低減する点において好適である。また、その場合には、遊技効果を高めるためのLED点灯パターンとエラー報知のためのLED点灯パターンとを切り分ける(遊技者が誤認してしまうことを回避する)ことを目的として、エラー報知のためのLED点灯パターンを複数種類(例えば、点灯だけでなく、消灯や点滅或いは点滅間隔の違い等による)設けておくよう構成してもよい。更に、エラー報知のためのLED点灯パターンを複数種類設ける場合には、動作異常累積カウンタを参照して、動作異常の発生回数に基づき当該点灯パターンを異ならせるよう構成してもよい。このような構成とすることで、可動体役物の異常発生回数を把握し易くなるのである。更に、エラー報知用LEDのハーネスと可動体役物のハーネスとは別体で構成されることが望ましく、このような構成とすることで、報知LEDと可動体役物との配線部分が同時に不良となることを抑止でき、可動体役物の動作異常を報知できない事態が発生することを低減することができる。
In this embodiment, as described above, the movable body accessory error notification means (corresponding to the front unit) 232-31 and the movable body accessory error notification means (corresponding to the back unit) 232-32 are configured by a plurality of LEDs. Thus, it is configured so that it is easy to grasp the error relating to the movable body accessory installed in which part of which unit by the lighting part of LED or the combination of lighting parts. Therefore, in this processing flow, the error notification mode is separated for each movable body accessory, so that the notification can be made in a different error notification mode for each movable body accessory. Moreover, the movable body accessory error notification means (corresponding to the front unit) 232-31 and the movable body accessory error notification means (corresponding to the back unit) 232-32 are not limited to providing the dedicated LED for error notification, The other
また、可動体役物エラー報知手段(表ユニット対応)232−31及び可動体役物エラー報知手段(裏ユニット対応)232−32は、LEDによって構成されることにも限定されず、演出表示装置2140上でエラー報知を行ってもよい。その場合には、例えば、QRコード内に何れのユニットの何れの箇所に設置された可動体役物に係るエラーであるのかに係る情報及び遊技機メーカーへの連絡先等の情報を包含させた上で表示するよう構成することも可能である。このような構成においては、当該QRコードを移動体通信端末等に取り込むことで、ホール運営者側から遊技機メーカー側へ、速やかに且つ動作異常に係る正確な情報を連絡することが可能となる。 In addition, the movable body accessory error notification means (corresponding to the front unit) 232-31 and the movable body accessory error notification means (corresponding to the back unit) 232-32 are not limited to being constituted by LEDs, and an effect display device. Error notification may be performed on 2140. In that case, for example, the information regarding the error relating to the movable object installed in which part of which unit and the information such as the contact information to the gaming machine manufacturer are included in the QR code. It can also be configured to display above. In such a configuration, by importing the QR code into a mobile communication terminal or the like, it becomes possible to quickly and accurately notify the information regarding the abnormal operation from the hall operator side to the gaming machine manufacturer side. .
次に、図32は、図20でのステップ8000のサブルーチンに係る、可動体役物動作可否・内容決定処理のフローチャートである。まず、ステップ8200で、可動体役物初期動作実行制御手段2325aは、後述する初期動作時動作可否・内容決定処理を実行する。次に、ステップ8400で、可動体役物エラー解消動作実行制御手段2325bは、後述するエラー解消動作時動作可否・内容決定処理を実行する。次に、ステップ8600で、可動体役物演出動作実行制御手段2325cは、後述する演出動作時動作可否・内容決定処理を実行し、次の処理(ステップ9000の可動体役物動作制御処理)に移行する。
Next, FIG. 32 is a flowchart of the movable body accessory operation availability / content determination process according to the subroutine of
次に、図33は、図32でのステップ8200のサブルーチンに係る、初期動作時動作可否・内容決定処理のフローチャートである。まず、ステップ8202で、初期動作可否・内容決定手段2325a−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A〜D初期動作未完了フラグの内の何れのフラグがオンであるかを判定し、当該判定結果に基づき異なる処理を実行する。ここで、当該判定の実行に際しては、「可動体役物A初期動作未完了フラグ」、「可動体役物C初期動作未完了フラグ」、「可動体役物B初期動作未完了フラグ」、「可動体役物D初期動作未完了フラグ」の順に実行する。尚、何れのフラグもオンでない場合には、次の処理(ステップ8400のエラー解消動作時動作可否・内容決定処理)に移行する。
Next, FIG. 33 is a flowchart of operation availability / content determination processing during initial operation according to the subroutine of
次に、ステップ8202で「可動体役物A初期動作未完了フラグ」がオンである場合、ステップ8220で、初期動作可否・内容決定手段2325a−1は、初期動作内容決定用参照テーブル2325a−1−1を参照し、可動体役物Aの初期動作パターンである所定の初期動作パターンAに基づき、モータAの駆動ステップ数を導出すると共に、当該導出したステップ数を可動体役物動作状態情報一時記憶手段2325d内のステップカウンタAにセットする。次に、ステップ8222で、初期動作可否・内容決定手段2325a−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A初期動作未完了フラグをオフにする。次に、ステップ8224で、初期動作可否・内容決定手段2325a−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A初期動作開始許可フラグをオンにし、次の処理(ステップ8400のエラー解消動作時動作可否・内容決定処理)に移行する。
Next, when the “movable body accessory A initial operation incomplete flag” is ON in
次に、ステップ8202で「可動体役物C初期動作未完了フラグ」がオンである場合、ステップ8240で、初期動作可否・内容決定手段2325a−1は、初期動作内容決定用参照テーブル2325a−1−1を参照し、可動体役物Cの初期動作パターンである所定の初期動作パターンCに基づき、モータCの駆動ステップ数を導出すると共に、当該導出したステップ数を可動体役物動作状態情報一時記憶手段2325d内のステップカウンタCにセットする。次に、ステップ8242で、初期動作可否・内容決定手段2325a−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物C初期動作未完了フラグをオフにする。次に、ステップ8244で、初期動作可否・内容決定手段2325a−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物C初期動作開始許可フラグをオンにし、次の処理(ステップ8400のエラー解消動作時動作可否・内容決定処理)に移行する。
Next, when the “movable body accessory C initial operation incomplete flag” is ON in
次に、ステップ8202で「可動体役物B初期動作未完了フラグ」がオンである場合、ステップ8260で、初期動作可否・内容決定手段2325a−1は、初期動作内容決定用参照テーブル2325a−1−1を参照し、可動体役物Bの初期動作に係る所定の励磁時間を、可動体役物動作状態情報一時記憶手段2325d内の励磁期間タイマBにセットする。次に、ステップ8262で、初期動作可否・内容決定手段2325a−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物B初期動作未完了フラグをオフにする。次に、ステップ8264で、初期動作可否・内容決定手段2325a−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物B初期動作開始許可フラグをオンにし、次の処理(ステップ8400のエラー解消動作時動作可否・内容決定処理)に移行する。
Next, when the “movable body accessory B initial operation incomplete flag” is ON in
次に、ステップ8202で「可動体役物D初期動作未完了フラグ」がオンである場合、ステップ8280で、初期動作可否・内容決定手段2325a−1は、初期動作内容決定用参照テーブル2325a−1−1を参照し、可動体役物Dの初期動作に係る所定の励磁時間を、可動体役物動作状態情報一時記憶手段2325d内の励磁期間タイマDにセットする。次に、ステップ8282で、初期動作可否・内容決定手段2325a−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物D初期動作未完了フラグをオフにする。次に、ステップ8284で、初期動作可否・内容決定手段2325a−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物D初期動作開始許可フラグをオンにし、次の処理(ステップ8400のエラー解消動作時動作可否・内容決定処理)に移行する。
Next, when the “movable body accessory D initial operation incomplete flag” is ON in
次に、図34は、図32でのステップ8400のサブルーチンに係る、エラー解消動作時動作可否・内容決定処理のフローチャートである。まず、ステップ8402で、エラー解消動作可否・内容決定手段2325b−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A〜Dエラー解消処理未完了フラグの内の何れのフラグがオンであるかを判定し、当該判定結果に基づき異なる処理を実行する。ここで、当該判定の実行に際しては、「可動体役物Aエラー解消処理未完了フラグ」、「可動体役物Cエラー解消処理未完了フラグ」、「可動体役物Bエラー解消処理未完了フラグ」、「可動体役物Dエラー解消処理未完了フラグ」の順に実行する。尚、何れのフラグもオンでない場合には、次の処理(ステップ8600の演出動作時動作可否・内容決定処理)に移行する。
Next, FIG. 34 is a flowchart of the operation determination / content determination process during the error resolution operation according to the subroutine of
次に、ステップ8402で「可動体役物Aエラー解消処理未完了フラグ」がオンである場合、ステップ8420で、エラー解消動作可否・内容決定手段2325b−1は、エラー解消動作内容決定用参照テーブル2325a−1−1を参照し、可動体役物Aのエラー解消動作パターンである所定のリトライ動作パターンAに基づき、モータAの駆動ステップ数を導出すると共に、当該導出したステップ数を可動体役物動作状態情報一時記憶手段2325d内のステップカウンタAにセットする。次に、ステップ8422で、エラー解消動作可否・内容決定手段2325b−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Aエラー解消処理未完了フラグをオフにする。次に、ステップ8424で、エラー解消動作可否・内容決定手段2325b−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Aエラー解消動作開始許可フラグをオンにし、次の処理(ステップ8600の演出動作時動作可否・内容決定処理)に移行する。
Next, when the “movable body accessory A error elimination processing incomplete flag” is ON in step 8402, in
次に、ステップ8402で「可動体役物Cエラー解消処理未完了フラグ」がオンである場合、ステップ8440で、エラー解消動作可否・内容決定手段2325b−1は、エラー解消動作内容決定用参照テーブル2325a−1−1を参照し、可動体役物Cのエラー解消動作パターンである所定のリトライ動作パターンCに基づき、モータCの駆動ステップ数を導出すると共に、当該導出したステップ数を可動体役物動作状態情報一時記憶手段2325d内のステップカウンタCにセットする。次に、ステップ8442で、エラー解消動作可否・内容決定手段2325b−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Cエラー解消処理未完了フラグをオフにする。次に、ステップ8444で、エラー解消動作可否・内容決定手段2325b−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Cエラー解消動作開始許可フラグをオンにし、次の処理(ステップ8600の演出動作時動作可否・内容決定処理)に移行する。 Next, when the “movable object C error elimination process incomplete flag” is ON in step 8402, in step 8440, the error resolution operation availability / content determination unit 2325 b-1 determines the error resolution operation content determination reference table. 2325a-1-1, the number of driving steps of the motor C is derived on the basis of a predetermined retry operation pattern C that is an error elimination operation pattern of the movable body accessory C, and the derived number of steps is calculated as the movable body role. It is set to the step counter C in the physical operation state information temporary storage means 2325d. Next, in Step 8442, the error elimination operation availability / content determination means 2325b-1 turns off the movable body accessory C error elimination processing incomplete flag in the movable body accessory operation state information temporary storage means 2325d. Next, in step 8444, the error elimination operation enable / disable content determination unit 2325b-1 turns on the movable body accessory C error elimination operation start permission flag in the movable body accessory operation state information temporary storage unit 2325d. The process shifts to the processing (operation availability / content determination process at the time of rendering operation in step 8600).
次に、ステップ8402で「可動体役物Bエラー解消処理未完了フラグ」がオンである場合、ステップ8460で、エラー解消動作可否・内容決定手段2325b−1は、エラー解消動作内容決定用参照テーブル2325a−1−1を参照し、可動体役物Bのエラー解消動作に係る所定の励磁時間を、可動体役物動作状態情報一時記憶手段2325d内の励磁期間タイマBにセットする。次に、ステップ8462で、エラー解消動作可否・内容決定手段2325b−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Bエラー解消処理未完了フラグをオフにする。次に、ステップ8464で、エラー解消動作可否・内容決定手段2325b−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Bエラー解消動作開始許可フラグをオンにし、次の処理(ステップ8600の演出動作時動作可否・内容決定処理)に移行する。
Next, when the “movable body accessory B error elimination process incomplete flag” is ON in step 8402, in
次に、ステップ8402で「可動体役物Dエラー解消処理未完了フラグ」がオンである場合、ステップ8480で、エラー解消動作可否・内容決定手段2325b−1は、エラー解消動作内容決定用参照テーブル2325a−1−1を参照し、可動体役物Dのエラー解消動作に係る所定の励磁時間を、可動体役物動作状態情報一時記憶手段2325d内の励磁期間タイマDにセットする。次に、ステップ8482で、エラー解消動作可否・内容決定手段2325b−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Dエラー解消処理未完了フラグをオフにする。次に、ステップ8484で、エラー解消動作可否・内容決定手段2325b−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Dエラー解消動作開始許可フラグをオンにし、次の処理(ステップ8600の演出動作時動作可否・内容決定処理)に移行する。
Next, when the “movable body accessory D error elimination processing incomplete flag” is ON in step 8402, in step 8480, the error elimination operation availability / content determination means 2325 b-1 determines the error resolution operation contents determination reference table. Referring to 2325a-1-1, a predetermined excitation time related to the error elimination operation of the movable body accessory D is set in the excitation period timer D in the movable body accessory operation state information temporary storage means 2325d. Next, in
次に、図35は、図32でのステップ8600のサブルーチンに係る、演出動作時動作可否・内容決定処理のフローチャートである。まず、ステップ8602で、演出動作可否・内容決定手段2325c−1は、演出一般情報一時記憶手段2324内の可動体役物演出動作可否決定許可フラグがオンであるか否かを判定する。ステップ8602でYesの場合、ステップ8610で、演出動作可否・内容決定手段2325c−1は、演出一般情報一時記憶手段2324内の可動体役物演出動作可否決定許可フラグをオフにし、ステップ8620に移行する。尚、ステップ8602でNoの場合には、次の処理(ステップ9000の可動体役物動作制御処理)に移行する。
Next, FIG. 35 is a flowchart of the motion availability / content determination process during the rendering operation according to the subroutine of
次に、ステップ8620で、演出動作可否・内容決定手段2325c−1は、可動体役物動作状態情報一時記憶手段2325dを参照し、可動体役物Aに係る初期動作関連のフラグがオンであるか否か、換言すると、可動体役物Aの初期動作が未完了であるか否かを判定する。ステップ8620でYesの場合には、ステップ8640に移行する。他方、ステップ8620でNoの場合、ステップ8622で、演出動作可否・内容決定手段2325c−1は、可動体役物動作状態情報一時記憶手段2325dを参照し、可動体役物Aに係るエラー関連のフラグがオンであるか否か、換言すると、可動体役物Aに何らかの動作異常が発生中であるか否かを判定する。ステップ8622でYesの場合には、ステップ8640に移行する。他方、ステップ8622でNoの場合、ステップ8626で、演出動作可否・内容決定手段2325c−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A+B演出動作実行決定許可フラグをオンにし、ステップ8640に移行する。ここで、可動体役物A+B演出動作実行決定許可フラグとは、可動体役物Aと可動体役物Bとを連動させて演出動作を実行するためのフラグであり、後述するように、当該フラグがオンであることを契機として可動体役物A及び可動体役物Bの演出動作が実行されることとなる。
Next, in step 8620, the rendering action availability / content determination means 2325c-1 refers to the movable body accessory operation state information temporary storage means 2325d, and the flag related to the initial action relating to the movable body accessory A is ON. Or in other words, it is determined whether or not the initial operation of the movable article A is incomplete. If Yes in step 8620, the process proceeds to step 8640. On the other hand, in the case of No in step 8620, in step 8622, the rendering operation availability / content determination unit 2325 c-1 refers to the movable body accessory operation state information temporary storage unit 2325 d, and relates to an error related to the movable body accessory A. It is determined whether or not the flag is turned on, in other words, whether or not any operation abnormality is occurring in the movable body accessory A. In the case of Yes in step 8622, the process proceeds to step 8640. On the other hand, in the case of No in step 8622, in
次に、ステップ8640で、演出動作可否・内容決定手段2325c−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A+B演出動作実行決定許可フラグがオフであるか否か、換言すると、可動体役物Bと連動動作する可動体役物Aが演出動作不可の状態であるか否かを判定する。ステップ8640でYesの場合には、ステップ8660に移行する。他方、ステップ8640でNoの場合、ステップ8642で、演出動作可否・内容決定手段2325c−1は、可動体役物動作状態情報一時記憶手段2325dを参照し、可動体役物Bに係る初期動作関連のフラグがオンであるか否か、換言すると、可動体役物Bの初期動作が未完了であるか否かを判定する。ステップ8642でYesの場合、ステップ8644で、演出動作可否・内容決定手段2325c−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A+B演出動作実行決定許可フラグをオフにし、ステップ8660に移行する。他方、ステップ8642でNoの場合、ステップ8646で、演出動作可否・内容決定手段2325c−1は、可動体役物動作状態情報一時記憶手段2325dを参照し、可動体役物Bに係るエラー関連のフラグがオンであるか否か、換言すると、可動体役物Bに何らかの動作異常が発生中であるか否かを判定する。ステップ8646でYesの場合には、ステップ8644に移行する。他方、ステップ8646でNoの場合には、ステップ8660に移行する。
Next, in
次に、ステップ8660で、演出動作可否・内容決定手段2325c−1は、可動体役物動作状態情報一時記憶手段2325dを参照し、可動体役物Cに係る初期動作関連のフラグがオンであるか否か、換言すると、可動体役物Cの初期動作が未完了であるか否かを判定する。ステップ8660でYesの場合には、ステップ8680に移行する。他方、ステップ8660でNoの場合、ステップ8662で、演出動作可否・内容決定手段2325c−1は、可動体役物動作状態情報一時記憶手段2325dを参照し、可動体役物Cに係るエラー関連のフラグがオンであるか否か、換言すると、可動体役物Cに何らかの動作異常が発生中であるか否かを判定する。ステップ8662でYesの場合には、ステップ8680に移行する。他方、ステップ8662でNoの場合、ステップ8666で、演出動作可否・内容決定手段2325c−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物C+D演出動作実行決定許可フラグをオンにし、ステップ8680に移行する。ここで、可動体役物C+D演出動作実行決定許可フラグとは、可動体役物Cと可動体役物Dとを連動させて演出動作を実行するためのフラグであり、後述するように、当該フラグがオンであることを契機として可動体役物C及び可動体役物Dの演出動作が実行されることとなる。
Next, in
次に、ステップ8680で、演出動作可否・内容決定手段2325c−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物C+D演出動作実行決定許可フラグがオフであるか否か、換言すると、可動体役物Dと連動動作する可動体役物Cが演出動作不可の状態であるか否かを判定する。ステップ8680でYesの場合には、ステップ8700に移行する。他方、ステップ8680でNoの場合、ステップ8682で、演出動作可否・内容決定手段2325c−1は、可動体役物動作状態情報一時記憶手段2325dを参照し、可動体役物Dに係る初期動作関連のフラグがオンであるか否か、換言すると、可動体役物Dの初期動作が未完了であるか否かを判定する。ステップ8682でYesの場合、ステップ8684で、演出動作可否・内容決定手段2325c−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物C+D演出動作実行決定許可フラグをオフにし、ステップ8700に移行する。他方、ステップ8682でNoの場合、ステップ8686で、演出動作可否・内容決定手段2325c−1は、可動体役物動作状態情報一時記憶手段2325dを参照し、可動体役物Dに係るエラー関連のフラグがオンであるか否か、換言すると、可動体役物Dに何らかの動作異常が発生中であるか否かを判定する。ステップ8686でYesの場合には、ステップ8684に移行する。他方、ステップ8686でNoの場合には、ステップ8700に移行する。
Next, in
次に、ステップ8700で、演出動作可否・内容決定手段2325c−1は、後述する演出動作時内容決定処理を実行し、次の処理(ステップ9000の可動体役物動作制御処理)に移行する。このように、可動体役物A又は可動体役物Bの何れかが演出動作不可の状態であると判定された場合には、可動体役物A及び可動体役物Bの双方に係る演出動作の実行許可が下りない。また、可動体役物C又は可動体役物Dの何れかが演出動作不可の状態であると判定された場合には、可動体役物C及び可動体役物Dの双方に係る演出動作の実行許可が下りないよう構成されているのである。このような構成とすることで、ある可動体役物と当該ある可動体役物と連動動作する他の可動体役物を備える場合、何れか一方の可動体役物の異常動作を検出した際には、関連する他方の可動体役物の動作を禁止するよう構成することで、可動体役物の動作異常に起因して遊技者が大当たり信頼度を誤認してしまうような事態を防止することもできる。
Next, in
次に、図36は、図35でのステップ8700のサブルーチンに係る、演出動作時内容決定処理のフローチャートである。まず、ステップ8730で、演出動作可否・内容決定手段2325c−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A+B演出動作実行決定許可フラグがオンであるか否かを判定する。ステップ8730でYesの場合には、ステップ8732に移行し、ステップ8730でNoの場合には、ステップ8750に移行する。
Next, FIG. 36 is a flowchart of the content determination processing at the time of effect operation according to the subroutine of
次に、ステップ8732で、演出動作可否・内容決定手段2325c−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A+B演出動作実行決定許可フラグをオフにする。次に、ステップ8734で、演出動作可否・内容決定手段2325c−1は、装図表示関連情報一時記憶手段2322cを参照し、装飾図柄の変動態様を取得すると共に、演出動作内容決定用参照テーブル2325c−1−1を参照して当該変動態様に基づき可動体役物A及び可動体役物Bの演出動作内容(演出動作を実行しない場合も含む)を決定して可動体役物動作状態情報一時記憶手段2325dに一時記憶する。次に、ステップ8736で、演出動作可否・内容決定手段2325c−1は、可動体役物動作状態情報一時記憶手段2325dに一時記憶されている可動体役物A及び可動体役物Bの演出動作内容に基づき、演出動作内容決定用参照テーブル2325c−1−1を参照して可動体役物A及び可動体役物Bの可動タイミングを決定して可動体役物動作状態情報一時記憶手段2325dに一時記憶する。次に、ステップ8738で、演出動作可否・内容決定手段2325c−1は、可動体役物動作状態情報一時記憶手段2325dに一時記憶されている可動体役物Aの基本停止位置及び演出動作内容に基づき、当該基本停止位置から位置センサAにおける所定の位置検出ポイントまで可動体役物Aを移動可能なステップ数を算出し、当該算出したステップ数を可動体役物動作状態情報一時記憶手段2325d内のステップカウンタAにセットする。次に、ステップ8740で、演出動作可否・内容決定手段2325c−1は、可動体役物Bの演出動作に係る所定の励磁時間を可動体役物動作状態情報一時記憶手段2325d内の励磁期間タイマBにセットする。次に、ステップ8742で、演出動作可否・内容決定手段2325c−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A演出動作開始許可フラグ及び可動体役物B演出動作開始許可フラグをオンにし、ステップ8750に移行する。
Next, in step 8732, the performance action availability / content determination unit 2325c-1 turns off the movable body accessory A + B effect operation execution decision permission flag in the movable body accessory operation state information temporary storage unit 2325d. Next, in step 8734, the performance operation enable / disable content determination unit 2325c-1 refers to the drawing display related information temporary storage unit 2322c, acquires the variation pattern of the decorative design, and also creates the production operation content determination reference table 2325c. -1-1 is used to determine the rendering operation contents (including the case where the rendering operation is not executed) of the movable body accessory A and the movable body accessory B based on the variation mode, and the movable body accessory operation state information temporarily Temporarily store in the storage means 2325d. Next, in
次に、ステップ8750で、演出動作可否・内容決定手段2325c−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物C+D演出動作実行決定許可フラグがオンであるか否かを判定する。ステップ8750でYesの場合には、ステップ8752に移行し、ステップ8750でNoの場合には、次の処理(ステップ9000の可動体役物動作制御処理)に移行する。
Next, in
次に、ステップ8752で、演出動作可否・内容決定手段2325c−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物C+D演出動作実行決定許可フラグをオフにする。次に、ステップ8754で、演出動作可否・内容決定手段2325c−1は、装図表示関連情報一時記憶手段2322cを参照し、装飾図柄の変動態様を取得すると共に、演出動作内容決定用参照テーブル2325c−1−1を参照して当該変動態様に基づき可動体役物C及び可動体役物Dの演出動作内容(演出動作を実行しない場合も含む)を決定して可動体役物動作状態情報一時記憶手段2325dに一時記憶する。次に、ステップ8756で、演出動作可否・内容決定手段2325c−1は、可動体役物動作状態情報一時記憶手段2325dに一時記憶されている可動体役物C及び可動体役物Dの演出動作内容に基づき、演出動作内容決定用参照テーブル2325c−1−1を参照して可動体役物C及び可動体役物Dの可動タイミングを決定して可動体役物動作状態情報一時記憶手段2325dに一時記憶する。次に、ステップ8758で、演出動作可否・内容決定手段2325c−1は、可動体役物動作状態情報一時記憶手段2325dに一時記憶されている可動体役物Cの基本停止位置及び演出動作内容に基づき、当該基本停止位置から位置センサCにおける所定の位置検出ポイントまで可動体役物Cを移動可能なステップ数を算出し、当該算出したステップ数を可動体役物動作状態情報一時記憶手段2325d内のステップカウンタCにセットする。次に、ステップ8760で、演出動作可否・内容決定手段2325c−1は、可動体役物Dの演出動作に係る所定の励磁時間を可動体役物動作状態情報一時記憶手段2325d内の励磁期間タイマDにセットする。次に、ステップ8762で、演出動作可否・内容決定手段2325c−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物C演出動作開始許可フラグ及び可動体役物D演出動作開始許可フラグをオンにし、次の処理(ステップ9000の可動体役物動作制御処理)に移行する。
Next, in
次に、図37は、図20でのステップ9000のサブルーチンに係る、可動体役物動作制御処理のフローチャートである。まず、ステップ9200で、可動体役物初期動作実行制御手段2325aは、後述する初期動作時動作開始制御処理を実行する。次に、ステップ9300で、可動体役物初期動作実行制御手段2325aは、後述する初期動作時動作終了制御処理を実行する。次に、ステップ9400で、可動体役物エラー解消動作実行制御手段2325bは、後述するエラー解消動作時動作開始制御処理を実行する。次に、ステップ9500で、可動体役物エラー解消動作実行制御手段2325bは、後述するエラー解消動作時動作終了制御処理を実行する。次に、ステップ9600で、可動体役物演出動作実行制御手段2325cは、後述する演出動作時動作開始制御処理を実行する。次に、ステップ9700で、可動体役物演出動作実行制御手段2325cは、後述する演出動作時動作終了制御処理を実行し、次の処理(ステップ4000のモータ・ソレノイド励磁開始制御処理)に移行する。
Next, FIG. 37 is a flowchart of the movable body accessory operation control process according to the subroutine of
次に、図38は、図37でのステップ9200のサブルーチンに係る、初期動作時動作開始制御処理のフローチャートである。まず、ステップ9202で、初期動作開始制御手段2325a−2は、装図表示関連情報一時記憶手段2322c内の図柄変動中フラグがオフであるか否かを判定する。ステップ9202でYesの場合には、ステップ9210に移行し、ステップ9202でNoの場合には、次の処理(ステップ9300の初期動作時動作終了制御処理)に移行する。
Next, FIG. 38 is a flowchart of the operation start control process during initial operation according to the subroutine of step 9200 in FIG. First, in
次に、ステップ9210で、初期動作開始制御手段2325a−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A〜D初期動作開始許可フラグの内の何れのフラグがオンであるかを判定し、当該判定結果に基づき異なる処理を実行する。ここで、当該判定の実行に際しては、「可動体役物A初期動作開始許可フラグ」、「可動体役物C初期動作開始許可フラグ」、「可動体役物B初期動作開始許可フラグ」、「可動体役物D初期動作開始許可フラグ」の順に実行する。尚、何れのフラグもオンでない場合には、次の処理(ステップ9300の初期動作時動作終了制御処理)に移行する。 Next, in step 9210, the initial operation start control means 2325a-2 turns on any of the movable body accessory A to D initial operation start permission flags in the movable body accessory operation state information temporary storage means 2325d. And different processing is executed based on the determination result. Here, in performing the determination, “movable body accessory A initial operation start permission flag”, “movable body accessory C initial operation start permission flag”, “movable body accessory B initial operation start permission flag”, “ It executes in the order of “movable body accessory D initial operation start permission flag”. If none of the flags is on, the process proceeds to the next process (operation end control process during initial operation in step 9300).
次に、ステップ9210で「可動体役物A初期動作開始許可フラグ」がオンである場合、ステップ9220で、初期動作開始制御手段2325a−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物C動作中フラグがオフであるか否か、換言すると、動作内容(初期動作、エラー解消動作、演出動作)に係らず可動体役物Cが動作中の状態でないか否かを判定する。ステップ9220でYesの場合、ステップ9222で、初期動作開始制御手段2325a−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A初期動作中フラグをオンにする。次に、ステップ9224で、初期動作開始制御手段2325a−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A初期動作開始許可フラグをオフにする。次に、ステップ9226で、初期動作開始制御手段2325a−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A動作中フラグをオンにし、次の処理(ステップ9300の初期動作時動作終了制御処理)に移行する。尚、ステップ9220でNoの場合には、次の処理(ステップ9300の初期動作時動作終了制御処理)に移行する。
Next, when the “movable body accessory A initial operation start permission flag” is ON in step 9210, in
次に、ステップ9210で「可動体役物C初期動作開始許可フラグ」がオンである場合、ステップ9240で、初期動作開始制御手段2325a−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A動作中フラグがオフであるか否か、換言すると、動作内容(初期動作、エラー解消動作、演出動作)に係らず可動体役物Aが動作中の状態でないか否かを判定する。ステップ9240でYesの場合、ステップ9242で、初期動作開始制御手段2325a−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物C初期動作中フラグをオンにする。次に、ステップ9244で、初期動作開始制御手段2325a−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物C初期動作開始許可フラグをオフにする。次に、ステップ9246で、初期動作開始制御手段2325a−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物C動作中フラグをオンにし、次の処理(ステップ9300の初期動作時動作終了制御処理)に移行する。尚、ステップ9220でNoの場合には、次の処理(ステップ9300の初期動作時動作終了制御処理)に移行する。
Next, when the “movable body accessory C initial operation start permission flag” is ON in step 9210, in step 9240, the initial operation start control unit 2325 a-2 stores the movable body accessory operation state information temporary storage unit 2325 d. Whether or not the movable body accessory A in-operation flag is off, in other words, whether or not the movable body accessory A is not in an operating state regardless of the operation content (initial operation, error canceling operation, production operation). Determine. In the case of Yes in step 9240, in
次に、ステップ9210で「可動体役物B初期動作開始許可フラグ」がオンである場合、ステップ9262で、初期動作開始制御手段2325a−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物B初期動作中フラグをオンにする。次に、ステップ9264で、初期動作開始制御手段2325a−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物B初期動作開始許可フラグをオフにする。次に、ステップ9266で、初期動作開始制御手段2325a−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物B動作中フラグをオンにし、次の処理(ステップ9300の初期動作時動作終了制御処理)に移行する。
Next, when the “movable body accessory B initial operation start permission flag” is ON in step 9210, in step 9262, the initial operation start control means 2325a-2 stores the movable body accessory operation state information temporary storage means 2325d. The moving body accessory B initial operation in-progress flag is turned on. Next, in Step 9264, the initial operation start control means 2325a-2 turns off the movable object combination B initial operation start permission flag in the movable object combination operation state information temporary storage means 2325d. Next, in
次に、ステップ9210で「可動体役物D初期動作開始許可フラグ」がオンである場合、ステップ9282で、初期動作開始制御手段2325a−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物D初期動作中フラグをオンにする。次に、ステップ9284で、初期動作開始制御手段2325a−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物D初期動作開始許可フラグをオフにする。次に、ステップ9286で、初期動作開始制御手段2325a−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物D動作中フラグをオンにし、次の処理(ステップ9300の初期動作時動作終了制御処理)に移行する。
Next, when the “movable body accessory D initial operation start permission flag” is ON in step 9210, in step 9282, the initial operation start control means 2325a-2 stores the movable body accessory operation state information temporary storage means 2325d. The moving body accessory D initial operation flag is turned on. Next, in
次に、図39は、図37でのステップ9300のサブルーチンに係る、初期動作時動作終了制御処理のフローチャートである。まず、ステップ9302で、初期動作終了制御手段2325a−3は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A〜D初期動作中フラグの内の何れのフラグがオンであるかを判定し、当該判定結果に基づき異なる処理を実行する。ここで、当該判定の実行に際しては、「可動体役物A初期動作中フラグ」、「可動体役物C初期動作中フラグ」、「可動体役物B初期動作中フラグ」、「可動体役物D初期動作中フラグ」の順に実行する。尚、何れのフラグもオンでない場合には、次の処理(ステップ9400のエラー解消動作時動作開始制御処理)に移行する。
Next, FIG. 39 is a flowchart of the operation end control process during initial operation according to the subroutine of
次に、ステップ9302で「可動体役物A初期動作中フラグ」がオンである場合、ステップ9312で、初期動作終了制御手段2325a−3は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Aに係る現在位置情報を参照し、可動体役物Aが初期位置に存在しているか否かを判定する。ここで、「可動体役物Aが初期位置に存在しているか否か」の判定方法について補足説明する。本実施形態では、前述のように、位置センサAとして可動体役物Aの初期位置に位置センサαを設置し、可動体役物の最大駆動位置に位置センサβを設置する一例を挙げている。そして、位置センサα又は位置センサβの何れの位置センサにて可動体役物Aを検出したかに基づき、可動体役物Aの存在位置を把握可能に構成されている。例えば、位置センサαにて可動体役物Aを検出した場合には、可動体役物Aが初期位置に存在することとなり、位置センサβにて可動体役物Aを検出した場合には、可動体役物Aが最大駆動位置に存在することとなる。また、位置センサα及び位置センサβの何れでも可動体役物Aを検出していない場合には、可動体役物Aは初期位置から最大駆動位置までの間の何れかの位置に存在することとなる。ここで、初期動作実行時においては、(1)可動体役物Aが初期位置から最大駆動位置まで移動可能な駆動ステップ数を予測算出し、(2)当該駆動ステップ数分だけ可動体役物Aを駆動させ、(3)当該駆動ステップ数分の駆動が完了する或いは位置センサβにて可動体役物Aを検出した場合に駆動を終了する。次に、(4)可動体役物Aが最大駆動位置から初期位置まで移動可能な駆動ステップ数を予測算出し、(5)当該駆動ステップ数分だけ可動体役物Aを駆動させ、(6)当該駆動ステップ数分の駆動が完了する或いは位置センサαにて可動体役物Aを検出した場合に駆動を終了し、初期動作の実行を完了する、という一連の動作が実行されることとなる。即ち、「可動体役物Aが初期位置に存在しているか否か」とは、(6)の検出判定処理を実行していることを意味しているのである。尚、このような(1)〜(6)の一連の動作は、初期動作実行時において可動体役物Aが初期位置に存在していることを担保した後に実行することが望ましい。しかしながら、遊技機の電源投入時には、可動体役物Aが初期位置に存在していない場合もあり、このような場合には、初期動作実行前の準備動作を要することがある。例えば、当該準備動作として、(A)位置センサα及び位置センサβの何れでも可動体役物Aを検出していない場合、(B)可動体役物Aを位置センサαの方向に所定ステップ(例えば、初期位置から最大駆動位置まで移動可能な駆動ステップ数の1/2)分だけ可動体役物Aを駆動させ、(C)当該駆動ステップ数分の駆動が完了する或いは位置センサαにて可動体役物Aを検出した場合に駆動を終了する。また、(C)で可動体役物Aを検出しなかった場合には、(D)可動体役物Aを位置センサβの方向に所定ステップ(例えば、初期位置から最大駆動位置まで移動可能な駆動ステップ数の1/2)分だけ可動体役物Aを駆動させ、(E)当該駆動ステップ数分の駆動が完了する或いは位置センサβにて可動体役物Aを検出した場合に駆動を終了し、(F)可動体役物Aを最大駆動位置から初期位置まで移動させる、という一連の動作を実行することを一例として挙げることができる。 Next, when the “movable body accessory A initial operation flag” is ON in step 9302, in step 9312, the initial operation end control means 2325 a-3 stores the movable body accessory operation state information temporary storage means 2325 d. With reference to the current position information relating to the movable body accessory A, it is determined whether or not the movable body accessory A is present at the initial position. Here, a supplementary explanation will be given of a method for determining whether or not the movable object A is present at the initial position. In the present embodiment, as described above, an example is given in which the position sensor α is installed at the initial position of the movable object A as the position sensor A, and the position sensor β is installed at the maximum drive position of the movable object. . The position of the movable object A is determined based on whether the position sensor α or the position sensor β has detected the movable object A. For example, when the movable body accessory A is detected by the position sensor α, the movable body accessory A exists at the initial position, and when the movable body accessory A is detected by the position sensor β, The movable body accessory A is present at the maximum drive position. In addition, when neither the position sensor α nor the position sensor β detects the movable body accessory A, the movable body accessory A exists at any position between the initial position and the maximum drive position. It becomes. Here, at the time of execution of the initial operation, (1) the number of driving steps in which the movable body accessory A can move from the initial position to the maximum driving position is predicted, and (2) the movable body accessory is equal to the number of driving steps. A is driven, and (3) the driving is terminated when the driving for the number of driving steps is completed or the movable object A is detected by the position sensor β. Next, (4) predicting and calculating the number of drive steps in which the movable body accessory A can move from the maximum drive position to the initial position, and (5) driving the movable body accessory A by the number of drive steps, (6 ) When a drive corresponding to the number of drive steps is completed, or when the movable object A is detected by the position sensor α, a series of operations are executed such that the drive ends and the execution of the initial operation is completed. Become. That is, “whether or not the movable object A is present at the initial position” means that the detection determination process (6) is being executed. Such a series of operations (1) to (6) is desirably performed after ensuring that the movable body accessory A is present at the initial position when the initial operation is performed. However, when the gaming machine is turned on, the movable object A may not be present at the initial position. In such a case, a preparatory operation before the initial operation may be required. For example, as the preparation operation, when (A) the movable body accessory A is not detected by either the position sensor α or the position sensor β, (B) the movable body accessory A is moved in the direction of the position sensor α by a predetermined step ( For example, the movable body accessory A is driven by ½) of the number of driving steps that can move from the initial position to the maximum driving position, and (C) the driving for the number of driving steps is completed or the position sensor α When the movable object A is detected, the driving is terminated. If (C) the movable body accessory A is not detected, (D) the movable body accessory A can be moved in the direction of the position sensor β by a predetermined step (for example, from the initial position to the maximum drive position). The movable body accessory A is driven by ½) of the number of driving steps, and (E) the driving is performed when the driving for the number of driving steps is completed or the movable body accessory A is detected by the position sensor β. For example, a series of operations of (F) moving the movable body accessory A from the maximum drive position to the initial position may be performed.
ステップ9312でYesの場合、ステップ9314で、初期動作終了制御手段2325a−3は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A動作中フラグをオフにする。次に、ステップ9316で、初期動作終了制御手段2325a−3は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A初期動作中フラグをオフにし、次の処理(ステップ9400のエラー解消動作時動作開始制御処理)に移行する。他方、ステップ9312でNoの場合、ステップ9320で、初期動作終了制御手段2325a−3は、可動体役物動作状態情報一時記憶手段2325d内のステップカウンタAを参照し、可動体役物Aの初期動作における予定動作(駆動ステップ数)分の動作が終了したか否かを判定する。ステップ9320でYesの場合には、ステップ9314に移行する。他方、ステップ9320でNoの場合、ステップ9322で、初期動作終了制御手段2325a−3は、装図表示関連情報一時記憶手段2322c内の図柄変動中フラグがオンであるか否か、即ち、初期動作実行中に図柄変動が開始されたか否かを判定する。ステップ9322でYesの場合、ステップ9324で、初期動作終了制御手段2325a−3は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A初期動作未完了フラグをオンにし、ステップ9314に移行する。他方、ステップ9322でNoの場合、ステップ9326で、初期動作終了制御手段2325a−3は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Aに係る現在位置情報と可動体役物Cに係る現在位置情報とを比較し、可動体役物Aと可動体役物Cとが干渉しているか(或いは干渉直前であるか)否かを判定する。ステップ9326でYesの場合には、ステップ9324に移行し、ステップ9326でNoの場合には、次の処理(ステップ9400のエラー解消動作時動作開始制御処理)に移行する。ここで、ステップ9322又はステップ9326でYesの場合、可動体役物A初期動作未完了フラグをオンとしている趣旨について詳述する。まず、本実施形態では、可動体役物Aの初期動作完了前に図柄変動が開始される、或いは可動体役物Aの初期動作完了前に可動体役物Cとの干渉を検出した場合には、可動体役物Aの初期動作を再度実行するよう構成されている。そして、当該初期動作の再実行においては、可動体役物Aに係るエラー発生とは見做さずに(即ち、図30における動作異常累積カウンタの加算処理を実行しない)、初期動作を再実行するため可動体役物A初期動作未完了フラグをオンとしているのである(以下、他の可動体役物についても同様)。
In the case of Yes in step 9312, in step 9314, the initial operation end control means 2325a-3 turns off the movable body accessory A operating flag in the movable body accessory operation state information temporary storage means 2325d. Next, in
次に、ステップ9302で「可動体役物C初期動作中フラグ」がオンである場合、ステップ9332で、初期動作終了制御手段2325a−3は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Cに係る現在位置情報を参照し、可動体役物Cが初期位置に存在しているか否かを判定する。ステップ9332でYesの場合、ステップ9334で、初期動作終了制御手段2325a−3は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物C動作中フラグをオフにする。次に、ステップ9336で、初期動作終了制御手段2325a−3は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物C初期動作中フラグをオフにし、次の処理(ステップ9400のエラー解消動作時動作開始制御処理)に移行する。他方、ステップ9332でNoの場合、ステップ9340で、初期動作終了制御手段2325a−3は、可動体役物動作状態情報一時記憶手段2325d内のステップカウンタCを参照し、可動体役物Cの初期動作における予定動作(駆動ステップ数)分の動作が終了したか否かを判定する。ステップ9340でYesの場合には、ステップ9334に移行する。他方、ステップ9340でNoの場合、ステップ9342で、初期動作終了制御手段2325a−3は、装図表示関連情報一時記憶手段2322c内の図柄変動中フラグがオンであるか否か、即ち、初期動作実行中に図柄変動が開始されたか否かを判定する。ステップ9342でYesの場合、ステップ9344で、初期動作終了制御手段2325a−3は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物C初期動作未完了フラグをオンにし、ステップ9344に移行する。他方、ステップ9342でNoの場合、ステップ9346で、初期動作終了制御手段2325a−3は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Cに係る現在位置情報と可動体役物Aに係る現在位置情報とを比較し、可動体役物Cと可動体役物Aとが干渉しているか(或いは干渉直前であるか)否かを判定する。ステップ9346でYesの場合には、ステップ9344に移行し、ステップ9346でNoの場合には、次の処理(ステップ9400のエラー解消動作時動作開始制御処理)に移行する。
Next, when the “movable body accessory C initial operation flag” is ON in step 9302, in step 9332, the initial operation end control means 2325 a-3 stores the movable body accessory operation state information temporary storage means 2325 d. With reference to the current position information related to the movable body accessory C, it is determined whether or not the movable body accessory C exists at the initial position. In the case of Yes in step 9332, in step 9334, the initial operation end control means 2325a-3 turns off the movable body accessory C operating flag in the movable body accessory operation state information temporary storage means 2325d. Next, in
次に、ステップ9302で「可動体役物B初期動作中フラグ」がオンである場合、ステップ9352で、初期動作終了制御手段2325a−3は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Bに係る現在位置情報を参照し、可動体役物Bが初期位置に存在しているか否かを判定する。ステップ9352でYesの場合、ステップ9354で、初期動作終了制御手段2325a−3は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物B動作中フラグをオフにする。次に、ステップ9356で、初期動作終了制御手段2325a−3は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物B初期動作中フラグをオフにし、次の処理(ステップ9400のエラー解消動作時動作開始制御処理)に移行する。他方、ステップ9352でNoの場合、ステップ9360で、初期動作終了制御手段2325a−3は、可動体役物動作状態情報一時記憶手段2325d内の励磁期間タイマBを参照し、可動体役物Bの初期動作における予定動作(励磁期間)分の動作が終了したか否かを判定する。ステップ9360でYesの場合には、ステップ9354に移行する。他方、ステップ9360でNoの場合、ステップ9362で、初期動作終了制御手段2325a−3は、装図表示関連情報一時記憶手段2322c内の図柄変動中フラグがオンであるか否か、即ち、初期動作実行中に図柄変動が開始されたか否かを判定する。ステップ9362でYesの場合、ステップ9364で、初期動作終了制御手段2325a−3は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物B初期動作未完了フラグをオンにし、ステップ9354に移行する。他方、ステップ9362でNoの場合には、次の処理(ステップ9400のエラー解消動作時動作開始制御処理)に移行する。尚、ステップ9302で「可動体役物D初期動作中フラグ」がオンである場合には、ステップ9352〜ステップ9364における処理と略同一の処理を実行するため説明を省略する。
Next, when the “movable body accessory B initial operation flag” is ON in step 9302, in
次に、図40は、図37でのステップ9400のサブルーチンに係る、エラー解消動作時動作開始制御処理のフローチャートである。まず、ステップ9402で、エラー解消動作開始制御手段2325b−2は、装図表示関連情報一時記憶手段2322c内の図柄変動中フラグがオフであるか否かを判定する。ステップ9402でYesの場合には、ステップ9410に移行し、ステップ9402でNoの場合には、次の処理(ステップ9500のエラー解消動作時動作終了制御処理)に移行する。
Next, FIG. 40 is a flowchart of the operation start control process at the time of error elimination operation according to the subroutine of
次に、ステップ9410で、エラー解消動作開始制御手段2325b−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A〜Dエラー解消動作開始許可フラグの内の何れのフラグがオンであるかを判定し、当該判定結果に基づき異なる処理を実行する。ここで、当該判定の実行に際しては、「可動体役物Aエラー解消動作開始許可フラグ」、「可動体役物Cエラー解消動作開始許可フラグ」、「可動体役物Bエラー解消動作開始許可フラグ」、「可動体役物Dエラー解消動作開始許可フラグ」の順に実行する。尚、何れのフラグもオンでない場合には、次の処理(ステップ9500のエラー解消動作時動作終了制御処理)に移行する。
Next, in
次に、ステップ9410で「可動体役物Aエラー解消動作開始許可フラグ」がオンである場合、ステップ9420で、エラー解消動作開始制御手段2325b−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物C動作中フラグがオフであるか否か、換言すると、動作内容(初期動作、エラー解消動作、演出動作)に係らず可動体役物Cが動作中の状態でないか否かを判定する。ステップ9420でYesの場合、ステップ9422で、エラー解消動作開始制御手段2325b−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Aエラー解消動作中フラグをオンにする。次に、ステップ9424で、エラー解消動作開始制御手段2325b−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Aエラー解消動作開始許可フラグをオフにする。次に、ステップ9426で、エラー解消動作開始制御手段2325b−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A動作中フラグをオンにし、次の処理(ステップ9500のエラー解消動作時動作終了制御処理)に移行する。尚、ステップ9420でNoの場合には、次の処理(ステップ9500のエラー解消動作時動作終了制御処理)に移行する。
Next, when the “movable body accessory A error elimination operation start permission flag” is ON in
次に、ステップ9410で「可動体役物Cエラー解消動作開始許可フラグ」がオンである場合、ステップ9440で、エラー解消動作開始制御手段2325b−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A動作中フラグがオフであるか否か、換言すると、動作内容(初期動作、エラー解消動作、演出動作)に係らず可動体役物Aが動作中の状態でないか否かを判定する。ステップ9440でYesの場合、ステップ9442で、エラー解消動作開始制御手段2325b−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Cエラー解消動作中フラグをオンにする。次に、ステップ9444で、エラー解消動作開始制御手段2325b−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Cエラー解消動作開始許可フラグをオフにする。次に、ステップ9446で、エラー解消動作開始制御手段2325b−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物C動作中フラグをオンにし、次の処理(ステップ9500のエラー解消動作時動作終了制御処理)に移行する。尚、ステップ9440でNoの場合には、次の処理(ステップ9500のエラー解消動作時動作終了制御処理)に移行する。
Next, when the “movable body accessory C error elimination operation start permission flag” is ON in
次に、ステップ9210で「可動体役物Bエラー解消動作開始許可フラグ」がオンである場合、ステップ9462で、エラー解消動作開始制御手段2325b−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Bエラー解消動作中フラグをオンにする。次に、ステップ9464で、エラー解消動作開始制御手段2325b−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Bエラー解消動作開始許可フラグをオフにする。次に、ステップ9466で、エラー解消動作開始制御手段2325b−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物B動作中フラグをオンにし、次の処理(ステップ9500のエラー解消動作時動作終了制御処理)に移行する。
Next, when the “movable body accessory B error elimination operation start permission flag” is ON in step 9210, in
次に、ステップ9210で「可動体役物Dエラー解消動作開始許可フラグ」がオンである場合、ステップ9482で、エラー解消動作開始制御手段2325b−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Dエラー解消動作中フラグをオンにする。次に、ステップ9484で、エラー解消動作開始制御手段2325b−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Dエラー解消動作開始許可フラグをオフにする。次に、ステップ9486で、エラー解消動作開始制御手段2325b−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物D動作中フラグをオンにし、次の処理(ステップ9500のエラー解消動作時動作終了制御処理)に移行する。
Next, when the “movable body accessory D error elimination operation start permission flag” is ON in step 9210, in
次に、図41は、図37でのステップ9500のサブルーチンに係る、エラー解消動作時動作終了制御処理のフローチャートである。まず、ステップ9502で、エラー解消動作終了制御手段2325b−3は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A〜Dエラー解消動作中フラグの内の何れのフラグがオンであるかを判定し、当該判定結果に基づき異なる処理を実行する。ここで、当該判定の実行に際しては、「可動体役物Aエラー解消動作中フラグ」、「可動体役物Cエラー解消動作中フラグ」、「可動体役物Bエラー解消動作中フラグ」、「可動体役物Dエラー解消動作中フラグ」の順に実行する。尚、何れのフラグもオンでない場合には、次の処理(ステップ9600の演出動作時動作開始制御処理)に移行する。
Next, FIG. 41 is a flowchart of the operation end control process at the time of error elimination according to the subroutine of
次に、ステップ9502で「可動体役物Aエラー解消動作中フラグ」がオンである場合、ステップ9312で、エラー解消動作終了制御手段2325b−3は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Aに係る現在位置情報及び基本停止位置情報を参照し、可動体役物Aが基本停止位置に存在しているか否かを判定する。ステップ9512でYesの場合、ステップ9514で、エラー解消動作終了制御手段2325b−3は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A動作中フラグをオフにする。次に、ステップ9516で、エラー解消動作終了制御手段2325b−3は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Aエラー解消動作中フラグをオフにし、次の処理(ステップ9600の演出動作時動作開始制御処理)に移行する。他方、ステップ9512でNoの場合、ステップ9520で、エラー解消動作終了制御手段2325b−3は、可動体役物動作状態情報一時記憶手段2325d内のステップカウンタAを参照し、可動体役物Aのエラー解消動作における予定動作(駆動ステップ数)分の動作が終了したか否かを判定する。ステップ9520でYesの場合には、ステップ9514に移行する。他方、ステップ9520でNoの場合、ステップ9522で、エラー解消動作終了制御手段2325b−3は、装図表示関連情報一時記憶手段2322c内の図柄変動中フラグがオンであるか否か、即ち、エラー解消動作実行中に図柄変動が開始されたか否かを判定する。ステップ9522でYesの場合、ステップ9524で、エラー解消動作終了制御手段2325b−3は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Aエラー解消処理未完了フラグをオンにし、ステップ9514に移行する。他方、ステップ9522でNoの場合、ステップ9526で、エラー解消動作終了制御手段2325b−3は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Aに係る現在位置情報と可動体役物Cに係る現在位置情報とを比較し、可動体役物Aと可動体役物Cとが干渉しているか(或いは干渉直前であるか)否かを判定する。ステップ9526でYesの場合には、ステップ9524に移行し、ステップ9526でNoの場合には、次の処理(ステップ9600の演出動作時動作開始制御処理)に移行する。ここで、ステップ9522又はステップ9526でYesの場合、可動体役物Aエラー解消処理未完了フラグをオンとしている趣旨について詳述する。まず、本実施形態では、可動体役物Aのエラー解消動作完了前に図柄変動が開始される、或いは可動体役物Aのエラー解消動作完了前に可動体役物Cとの干渉を検出した場合には、可動体役物Aのエラー解消動作を適正な動作タイミング(例えば、装飾図柄の視認を妨げたり、他の可動体役物との連動動作と誤認しないタイミング)に到達することを待って再度実行するよう構成されている。そして、当該エラー解消動作の再実行においては、可動体役物Aに係るエラー発生とは見做さず(即ち、図30における動作異常累積カウンタの加算処理を実行しない)、エラー解消動作を再実行するため可動体役物Aエラー解消処理未完了フラグをオンとしているのである(以下、他の可動体役物についても同様)。
Next, when the “movable body accessory A error canceling operation flag” is ON in
次に、ステップ9502で「可動体役物Cエラー解消動作中フラグ」がオンである場合、ステップ9532で、エラー解消動作終了制御手段2325b−3は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Cに係る現在位置情報及び基本停止位置情報を参照し、可動体役物Cが基本停止位置に存在しているか否かを判定する。ステップ9532でYesの場合、ステップ9534で、エラー解消動作終了制御手段2325b−3は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物C動作中フラグをオフにする。次に、ステップ9536で、エラー解消動作終了制御手段2325b−3は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Cエラー解消動作中フラグをオフにし、次の処理(ステップ9600の演出動作時動作開始制御処理)に移行する。他方、ステップ9532でNoの場合、ステップ9540で、エラー解消動作終了制御手段2325b−3は、可動体役物動作状態情報一時記憶手段2325d内のステップカウンタCを参照し、可動体役物Cのエラー解消動作における予定動作(駆動ステップ数)分の動作が終了したか否かを判定する。ステップ9540でYesの場合には、ステップ9534に移行する。他方、ステップ9540でNoの場合、ステップ9542で、エラー解消動作終了制御手段2325b−3は、装図表示関連情報一時記憶手段2322c内の図柄変動中フラグがオンであるか否か、即ち、エラー解消動作実行中に図柄変動が開始されたか否かを判定する。ステップ9542でYesの場合、ステップ9544で、エラー解消動作終了制御手段2325b−3は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Cエラー解消処理未完了フラグをオンにし、ステップ9534に移行する。他方、ステップ9542でNoの場合、ステップ9546で、エラー解消動作終了制御手段2325b−3は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Cに係る現在位置情報と可動体役物Aに係る現在位置情報とを比較し、可動体役物Cと可動体役物Aとが干渉しているか(或いは干渉直前であるか)否かを判定する。ステップ9546でYesの場合には、ステップ9544に移行し、ステップ9546でNoの場合には、次の処理(ステップ9600の演出動作時動作開始制御処理)に移行する。
Next, when the “movable body accessory C error elimination operation flag” is ON in
次に、ステップ9502で「可動体役物Bエラー解消動作中フラグ」がオンである場合、ステップ9552で、エラー解消動作終了制御手段2325b−3は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Bに係る現在位置情報及び基本停止位置情報を参照し、可動体役物Bが基本停止位置に存在しているか否かを判定する。ステップ9552でYesの場合、ステップ9554で、エラー解消動作終了制御手段2325b−3は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物B動作中フラグをオフにする。次に、ステップ9556で、エラー解消動作終了制御手段2325b−3は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Bエラー解消動作中フラグをオフにし、次の処理(ステップ9600の演出動作時動作開始制御処理)に移行する。他方、ステップ9552でNoの場合、ステップ9560で、エラー解消動作終了制御手段2325b−3は、可動体役物動作状態情報一時記憶手段2325d内の励磁期間タイマBを参照し、可動体役物Bのエラー解消動作における予定動作(励磁期間)分の動作が終了したか否かを判定する。ステップ9560でYesの場合には、ステップ9554に移行する。他方、ステップ9560でNoの場合、ステップ9562で、エラー解消動作終了制御手段2325b−3は、装図表示関連情報一時記憶手段2322c内の図柄変動中フラグがオンであるか否か、即ち、エラー解消動作実行中に図柄変動が開始されたか否かを判定する。ステップ9562でYesの場合、ステップ9564で、エラー解消動作終了制御手段2325b−3は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Bエラー解消処理未完了フラグをオンにし、ステップ9554に移行する。他方、ステップ9562でNoの場合には、次の処理(ステップ9600の演出動作時動作開始制御処理)に移行する。尚、ステップ9502で「可動体役物D初期動作中フラグ」がオンである場合には、ステップ9552〜ステップ9564における処理と略同一の処理を実行するため説明を省略する。
Next, when the “movable body accessory B error elimination operation flag” is ON in
次に、図42は、図37でのステップ9600のサブルーチンに係る、演出動作時動作開始制御処理のフローチャートである。まず、ステップ9602で、演出動作開始制御手段2325c−2は、可動体役物動作状態情報一時記憶手段2325dを参照し、可動体役物A〜Dの内の何れかの可動体役物の可動タイミング(図36参照)に到達したか否かを判定する。ステップ9602でYesの場合には、ステップ9610に移行し、ステップ9602でNoの場合には、次の処理(ステップ9700の演出動作時動作終了制御処理)に移行する。
Next, FIG. 42 is a flowchart of the motion start operation start control process according to the subroutine of
次に、ステップ9610で、演出動作開始制御手段2325c−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A〜D演出動作開始許可フラグの内の何れのフラグがオンであるかを判定し、当該判定結果に基づき異なる処理を実行する。ここで、当該判定の実行に際しては、「可動体役物A演出動作開始許可フラグ」、「可動体役物C演出動作開始許可フラグ」、「可動体役物B演出動作開始許可フラグ」、「可動体役物D演出動作開始許可フラグ」の順に実行する。尚、何れのフラグもオンでない場合には、次の処理(ステップ9700の演出動作時動作終了制御処理)に移行する。
Next, in
次に、ステップ9610で「可動体役物A演出動作開始許可フラグ」がオンである場合、ステップ9622で、演出動作開始制御手段2325c−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A演出動作中フラグをオンにする。次に、ステップ9624で、演出動作開始制御手段2325c−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A演出動作開始許可フラグをオフにする。次に、ステップ9626で、演出動作開始制御手段2325c−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A動作中フラグをオンにし、次の処理(ステップ9700の演出動作時動作終了制御処理)に移行する。
Next, when the “movable body accessory A effect operation start permission flag” is ON in
次に、ステップ9610で「可動体役物C演出動作開始許可フラグ」がオンである場合、ステップ9642で、演出動作開始制御手段2325c−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物C演出動作中フラグをオンにする。次に、ステップ9644で、演出動作開始制御手段2325c−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物C演出動作開始許可フラグをオフにする。次に、ステップ9646で、演出動作開始制御手段2325c−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物C動作中フラグをオンにし、次の処理(ステップ9700の演出動作時動作終了制御処理)に移行する。
Next, when the “movable body accessory C effect operation start permission flag” is ON in
次に、ステップ9610で「可動体役物B演出動作開始許可フラグ」がオンである場合、ステップ9662で、演出動作開始制御手段2325c−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物B演出動作中フラグをオンにする。次に、ステップ9664で、演出動作開始制御手段2325c−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物B演出動作開始許可フラグをオフにする。次に、ステップ9666で、演出動作開始制御手段2325c−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物B動作中フラグをオンにし、次の処理(ステップ9700の演出動作時動作終了制御処理)に移行する。
Next, when the “movable body accessory B effect operation start permission flag” is ON in
次に、ステップ9610で「可動体役物D演出動作開始許可フラグ」がオンである場合、ステップ9682で、演出動作開始制御手段2325c−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物D演出動作中フラグをオンにする。次に、ステップ9684で、演出動作開始制御手段2325c−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物D演出動作開始許可フラグをオフにする。次に、ステップ9686で、演出動作開始制御手段2325c−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物D動作中フラグをオンにし、次の処理(ステップ9700の演出動作時動作終了制御処理)に移行する。
Next, when the “movable body accessory D effect operation start permission flag” is ON in
次に、図43は、図37でのステップ9700のサブルーチンに係る、演出動作時動作終了制御処理のフローチャートである。まず、ステップ9702で、演出動作終了制御手段2325c−3は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A〜D演出動作中フラグの内の何れのフラグがオンであるかを判定し、当該判定結果に基づき異なる処理を実行する。ここで、当該判定の実行に際しては、「可動体役物A演出動作中フラグ」、「可動体役物C演出動作中フラグ」、「可動体役物B演出動作中フラグ」、「可動体役物D演出動作中フラグ」の順に実行する。尚、何れのフラグもオンでない場合には、次の処理(ステップ4000のモータ・ソレノイド励磁開始制御処理)に移行する。
Next, FIG. 43 is a flowchart of the operation end control process at the time of effect operation according to the subroutine of step 9700 in FIG. First, in
次に、ステップ9702で「可動体役物A演出動作中フラグ」がオンである場合、ステップ9712で、演出動作終了制御手段2325c−3は、可動体役物動作状態情報一時記憶手段2325d内のステップカウンタAを参照し、可動体役物Aの演出動作における予定動作(駆動ステップ数)分の動作が終了したか否かを判定する。ステップ9712でYesの場合、ステップ9714で、演出動作終了制御手段2325c−3は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A動作中フラグをオフにする。次に、ステップ9716で、演出動作終了制御手段2325c−3は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A演出動作中フラグをオフにし、次の処理(ステップ4000のモータ・ソレノイド励磁開始制御処理)に移行する。他方、ステップ9712でNoの場合、ステップ9722で、演出動作終了制御手段2325c−3は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Aに係る現在位置情報と可動体役物Cに係る現在位置情報とを比較し、可動体役物Aと可動体役物Cとが干渉しているか(或いは干渉直前であるか)否かを判定する。ステップ9722でYesの場合には、ステップ9714に移行し、ステップ9722でNoの場合には、次の処理(ステップ4000のモータ・ソレノイド励磁開始制御処理)に移行する。
Next, when the “movable body accessory A effect operating flag” is ON in
次に、ステップ9702で「可動体役物C演出動作中フラグ」がオンである場合、ステップ9732で、演出動作終了制御手段2325c−3は、可動体役物動作状態情報一時記憶手段2325d内のステップカウンタCを参照し、可動体役物Cの演出動作における予定動作(駆動ステップ数)分の動作が終了したか否かを判定する。ステップ9732でYesの場合、ステップ9734で、演出動作終了制御手段2325c−3は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物C動作中フラグをオフにする。次に、ステップ9736で、演出動作終了制御手段2325c−3は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物C演出動作中フラグをオフにし、次の処理(ステップ4000のモータ・ソレノイド励磁開始制御処理)に移行する。他方、ステップ9732でNoの場合、ステップ9742で、演出動作終了制御手段2325c−3は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Cに係る現在位置情報と可動体役物Aに係る現在位置情報とを比較し、可動体役物Cと可動体役物Aとが干渉しているか(或いは干渉直前であるか)否かを判定する。ステップ9742でYesの場合には、ステップ9734に移行し、ステップ9742でNoの場合には、次の処理(ステップ4000のモータ・ソレノイド励磁開始制御処理)に移行する。
Next, when the “movable body accessory C effect operating flag” is ON in
次に、ステップ9702で「可動体役物B演出動作中フラグ」がオンである場合、ステップ9752で、演出動作終了制御手段2325c−3は、可動体役物動作状態情報一時記憶手段2325d内の励磁期間タイマBを参照し、可動体役物Bの演出動作における予定動作(励磁期間)分の動作が終了したか否かを判定する。ステップ9752でYesの場合、ステップ9754で、演出動作終了制御手段2325c−3は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物B動作中フラグをオフにする。次に、ステップ9756で、演出動作終了制御手段2325c−3は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物B演出動作中フラグをオフにし、次の処理(ステップ4000のモータ・ソレノイド励磁開始制御処理)に移行する。他方、ステップ9752でNoの場合には、次の処理(ステップ4000のモータ・ソレノイド励磁開始制御処理)に移行する。尚、ステップ9702で「可動体役物D初期動作中フラグ」がオンである場合には、ステップ9752〜ステップ9756における処理と略同一の処理を実行するため説明を省略する。
Next, when the “movable body accessory B effect operating flag” is ON in
次に、図44は、図20でのステップ4000のサブルーチンに係る、モータ・ソレノイド励磁開始制御処理のフローチャートである。まず、ステップ4002で、駆動源励磁開始制御手段2325f−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A〜D動作中フラグの内の何れのフラグがオンであるかを判定し、当該判定結果に基づき異なる処理を実行する。ここで、当該判定の実行に際しては、「可動体役物A動作中フラグ」、「可動体役物C動作中フラグ」、「可動体役物B動作中フラグ」、「可動体役物D動作中フラグ」の順に実行する。尚、何れのフラグもオンでない場合には、次の処理(ステップ4500のモータ・ソレノイド励磁終了制御処理)に移行する。
Next, FIG. 44 is a flowchart of motor / solenoid excitation start control processing according to the subroutine of
次に、ステップ4002で「可動体役物A動作中フラグ」がオンである場合、ステップ4012で、駆動源励磁開始制御手段2325f−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A励磁中フラグがオフであるか否かを判定する。ステップ4012でYesの場合、ステップ4016で、駆動源励磁開始制御手段2325f−1は、可動体役物動作状態情報一時記憶手段2325d内のステップカウンタAのカウンタ値に基づき、モータAへ励磁パルス信号(図7参照)を出力する。ここで、本実施形態では、モータAへの制御信号(図7参照)はデフォルトでHレベルに保たれるよう構成されおり、本処理において出力される励磁パルス信号は当該パルス信号の矩形を保持して励磁信号へと変換される。また、ステップカウンタAのカウンタ値は、励磁パルス信号の出力に応じて適宜減算される{適宜減算とは、より詳細には、例えば、モータA、Cが4相のステッピングモータを採用している場合、励磁パルス信号は、所定の励磁方式(例えば、1相、2相又は1−2相励磁)に基づき各相(例えば、A、B、A−、B−)の夫々に対して出力される。他方、制御信号は全相に対して出力されるような構成となっているが、説明を簡略にするため、このような説明としている}ことを補足しておく。次に、ステップ4018で、駆動源励磁開始制御手段2325f−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A励磁中フラグをオンにし、次の処理(ステップ4500のモータ・ソレノイド励磁終了制御処理)に移行する。他方、ステップ4012でNoの場合には、次の処理(ステップ4500のモータ・ソレノイド励磁終了制御処理)に移行する。尚、ステップ4002で「可動体役物C動作中フラグ」がオンである場合には、ステップ4012〜ステップ4018における処理と略同一の処理を実行するため説明を省略する。
Next, when the “moving body accessory A operating flag” is ON in
次に、ステップ4002で「可動体役物B動作中フラグ」がオンである場合、ステップ4030で、駆動源励磁開始制御手段2325f−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物B励磁中フラグがオフであるか否かを判定する。ステップ4030でYesの場合、ステップ4034で、駆動源励磁開始制御手段2325f−1は、所定のパルス信号をソレノイドBへ出力する。ここで、本実施形態では、ソレノイドBへの制御信号(図7参照)はデフォルトでHレベルに保たれるよう構成されている。次に、ステップ4036で、駆動源励磁開始制御手段2325f−1は、可動体役物動作状態情報一時記憶手段2325d内の励磁期間タイマBをスタートさせる。次に、ステップ4038で、駆動源励磁開始制御手段2325f−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物B励磁中フラグをオンにし、次の処理(ステップ4500のモータ・ソレノイド励磁終了制御処理)に移行する。他方、ステップ4030でNoの場合には、次の処理(ステップ4500のモータ・ソレノイド励磁終了制御処理)に移行する。尚、ステップ4002で「可動体役物C動作中フラグ」がオンである場合には、ステップ4012〜ステップ4018における処理と略同一の処理を実行するため説明を省略する。
Next, when the “moving body accessory B operating flag” is ON in
次に、図45は、図20でのステップ4500のサブルーチンに係る、モータ・ソレノイド励磁終了制御処理のフローチャートである。まず、ステップ4502で、駆動源励磁終了制御手段2325f−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A〜D励磁中フラグの内の何れのフラグがオンであるかを判定し、当該判定結果に基づき異なる処理を実行する。ここで、当該判定の実行に際しては、「可動体役物A励磁中フラグ」、「可動体役物C励磁中フラグ」、「可動体役物B励磁中フラグ」、「可動体役物D励磁中フラグ」の順に実行する。尚、何れのフラグもオンでない場合には、次の処理(ステップ3000の長期通電異常監視制御処理)に移行する。
Next, FIG. 45 is a flowchart of the motor / solenoid excitation end control process according to the subroutine of
次に、ステップ4502で「可動体役物A励磁中フラグ」がオンである場合、ステップ4512で、駆動源励磁終了制御手段2325f−2は、可動体役物動作状態情報一時記憶手段2325d内のステップカウンタAを参照し、所定ステップ数分のパルス信号出力が完了したか否かを判定する。ステップ4512でYesの場合、ステップ4513で、駆動源励磁終了制御手段2325f−2は、モータAへのパルス信号の出力を終了する。次に、ステップ4514で、駆動源励磁終了制御手段2325f−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A励磁中フラグをオフにし、次の処理(ステップ3000の長期通電異常監視制御処理)に移行する。他方、ステップ4512でNoの場合、ステップ4516で、駆動源励磁終了制御手段2325f−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A動作中フラグがオフであるか否かを判定する。ステップ4516でYesの場合には、ステップ4513に移行し、ステップ4516でNoの場合には、次の処理(ステップ3000の長期通電異常監視制御処理)に移行する。尚、ステップ4502で「可動体役物C励磁中フラグ」がオンである場合には、ステップ4512〜ステップ4516における処理と略同一の処理を実行するため説明を省略する。
Next, when the “moving body accessory A exciting flag” is ON in
次に、ステップ4502で「可動体役物B励磁中フラグ」がオンである場合、ステップ4530で、駆動源励磁終了制御手段2325f−2は、可動体役物動作状態情報一時記憶手段2325d内の励磁期間タイマBがゼロであるか(即ち、セットされた所定時間が経過したか)否かを判定する。ステップ4530でYesの場合、ステップ4531で、駆動源励磁終了制御手段2325f−2は、ソレノイドBへのパルス信号の出力を終了する。次に、ステップ4532で、駆動源励磁終了制御手段2325f−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物B励磁中フラグをオフにし、次の処理(ステップ3000の長期通電異常監視制御処理)に移行する。他方、ステップ4530でNoの場合、ステップ4534で、駆動源励磁終了制御手段2325f−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物B動作中フラグがオフであるか否かを判定する。ステップ4534でYesの場合には、ステップ4531に移行し、ステップ4534でNoの場合には、次の処理(ステップ3000の長期通電異常監視制御処理)に移行する。尚、ステップ4502で「可動体役物D励磁中フラグ」がオンである場合には、ステップ4530〜ステップ4534における処理と略同一の処理を実行するため説明を省略する。
Next, when the “moving body accessory B excitation flag” is ON in
次に、図46は、図20でのステップ3000のサブルーチンに係る、長期通電異常監視制御処理のフローチャートである。まず、ステップ3002で、可動体役物過通電回避制御手段2325gは、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A〜D励磁中フラグの内の何れのフラグがオンであるかを判定し、当該判定結果に基づき異なる処理を実行する。ここで、当該判定の実行に際しては、「可動体役物A励磁中フラグ」、「可動体役物C励磁中フラグ」、「可動体役物B励磁中フラグ」、「可動体役物D励磁中フラグ」の順に実行する。尚、何れのフラグもオンでない場合には、ステップ3050に移行する。
Next, FIG. 46 is a flowchart of the long-term energization abnormality monitoring control process according to the subroutine of
次に、ステップ3002で「可動体役物A励磁中フラグ」がオンである場合、ステップ3012で、可動体役物過通電回避制御手段2325gは、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A通電時間監視中フラグがオフであるか否かを判定する。ステップ3012でYesの場合、ステップ3014で、駆動源数上限リミッタ制御手段2325g−1は、現在駆動中(励磁中)のモータ数と当該励磁予定であるモータAに係るモータ数との総和を算出する。次に、ステップ3016で、駆動源数上限リミッタ制御手段2325g−1は、当該算出したモータ数の総和が所定数(本実施形態では、3)未満であるか否かを判定する。ステップ3016でYesの場合、ステップ3018で、可動体役物過通電回避制御手段2325gは、駆動源毎通電時間監視タイマ2325g−2内のモータAに係る通電時間監視タイマAに所定値(例えば、5秒)をセットしてスタートさせる。次に、ステップ3020で、可動体役物過通電回避制御手段2325gは、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A通電時間監視中フラグをオンにし、ステップ3050に移行する。他方、ステップ3012でNoの場合、ステップ3022で、可動体役物過通電回避制御手段2325gは、駆動源毎通電時間監視タイマ2325g−2内のモータAに係る通電時間監視タイマAがゼロであるか否かを判定する。ステップ3022でYesの場合、ステップ3024で、可動体役物過通電回避制御手段2325gは、モータAに係る制御信号の出力を所定期間停止(Lレベルに保持)し、ステップ3050に移行する。ここで、本処理において、制御信号の出力がLレベルに保持された場合には、モータAへパルス信号が出力されていたとしても、当該パルス信号は全てLレベルに変換される(図7参照)こととなる。他方、ステップ3016でNoの場合には、ステップ3024に移行し、ステップ3022でNoの場合には、ステップ3050に移行する。尚、ステップ3002で「可動体役物C励磁中フラグ」がオンである場合には、ステップ3012〜ステップ3024における処理と略同一の処理を実行するため説明を省略する。
Next, when the “moving body accessory A energizing flag” is ON in
ここで、ステップ3016の判定処理について補足説明する。本実施形態では、演出動作内容決定用参照テーブル2325c−1−1等で示されるように、可動体役物Aを駆動する駆動源であるモータA(モータ数2)と、可動体役物Cを駆動する駆動源であるモータC(モータ数1)とは、同時に駆動することがないよう構成されている。即ち、サブ基板側の処理が正常動作である限りにおいては、ステップ3016の判定結果がNoとなることはない。即ち、当該判定処理は、サブ基板側の処理が何らかの要因によって異常動作していることを想定した処理であることを補足しておく。 Here, a supplementary explanation will be given of the determination processing in step 3016. In the present embodiment, as shown in the production operation content determination reference table 2325c-1-1 and the like, the motor A (number of motors 2) that is a driving source for driving the movable body accessory A and the movable body accessory C The motor C (1 motor) that is a drive source for driving the motor is configured so as not to be driven simultaneously. That is, as long as the processing on the sub-board side is a normal operation, the determination result in step 3016 is not No. That is, it is supplemented that the determination process is a process assuming that the process on the sub-board side is operating abnormally for some reason.
次に、ステップ3002で「可動体役物B励磁中フラグ」がオンである場合、ステップ3030で、可動体役物過通電回避制御手段2325gは、可動体役物動作状態情報一時記憶手段2325d内の可動体役物B通電時間監視中フラグがオフであるか否かを判定する。ステップ3030でYesの場合、ステップ3032で、可動体役物過通電回避制御手段2325gは、駆動源毎励磁履歴情報累積一時記憶手段2325g−3を参照し、現時点から過去直近における所定期間X分の励磁履歴を取得し、当該所定期間X内における励磁出力期間の総和Yを算出する。次に、ステップ3034で、可動体役物過通電回避制御手段2325gは、当該算出した励磁出力期間の総和Yと当該出力予定である励磁期間タイマBのタイマ値との総和Zを算出する。次に、ステップ3036で、可動体役物過通電回避制御手段2325gは、(Y+Z)/(X+Z)が所定比率未満であるか否かを判定する。ここで、例えば、駆動源毎励磁履歴情報累積一時記憶手段2325g−3内に一時記憶されている可動体役物Bに係る励磁出力データが、励磁出力5秒→非励磁出力20秒→励磁出力5秒→非励磁出力20秒であった場合には、X=50秒、Y=10秒となる。また、このような状況下、励磁期間タイマBのタイマ値が10秒であった場合には、Z=10秒となり、(Y+Z)/(X+Z)=(10+10)/(50+10)=1/3となる。そして、所定比率が30%であった場合には、1/3>所定比率30%となり、ステップ3036における判定結果がNoであることとなる。尚、本実施形態では、図7に示されるように、駆動源に対する励磁信号(又は励磁電力)の送信履歴情報をバッファ内に蓄積できるよう構成されており、同図における当該バッファが駆動源毎励磁履歴情報累積一時記憶手段2325g−3に該当している。フローチャートの説明に戻ると、ステップ3036でYesの場合、ステップ3038で、可動体役物過通電回避制御手段2325gは、駆動源毎通電時間監視タイマ2325g−2内のソレノイドBに係る通電時間監視タイマBに所定値(例えば、10秒)をセットしてスタートさせる。次に、ステップ3040で、可動体役物過通電回避制御手段2325gは、可動体役物動作状態情報一時記憶手段2325d内の可動体役物B通電時間監視中フラグをオンにし、ステップ3050に移行する。他方、ステップ3030でNoの場合、ステップ3042で、可動体役物過通電回避制御手段2325gは、駆動源毎通電時間監視タイマ2325g−2内のソレノイドBに係る通電時間監視タイマBがゼロであるか否かを判定する。ステップ3042でYesの場合、ステップ3044で、可動体役物過通電回避制御手段2325gは、ソレノイドBに係る制御信号の出力を所定期間停止(Lレベルに保持)し、ステップ3050に移行する。ここで、本処理において、制御信号の出力がLレベルに保持された場合には、ソレノイドBへ励磁パルス信号が出力されていたとしても、当該励磁パルス信号は全てLレベルに変換される(図7参照)こととなる。他方、ステップ3036でNoの場合には、ステップ3044に移行し、ステップ3042でNoの場合には、ステップ3050に移行する。尚、ステップ3002で「可動体役物D励磁中フラグ」がオンである場合には、ステップ3030〜ステップ3044における処理と略同一の処理を実行するため説明を省略する。
Next, when the “moving body accessory B exciting flag” is ON in
次に、ステップ3050で、可動体役物過通電回避制御手段2325gは、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A〜D励磁中フラグがオフである可動体役物を取得し、当該可動体役物に係る可動体役物A〜D通電時間監視中フラグをオフにし、次の処理(ステップ5200の可動体役物基本位置設定処理)に移行する。
Next, in
次に、図47〜図56を参照して、サブ基板側で実行される可動体役物の特殊可動制御処理について説明する。まず、図47は、メイン側から振動エラー報知指示情報を受信した場合に実行されるサブ基板側の割り込み処理のフローチャートである。はじめに、本実施形態におけるサブ基板側の割り込み処理とは、サブ基板側のメイン処理フローチャート実行時において、メイン側からの振動エラー報知指示情報(図10のステップ1056参照)を受信した場合には、当該実行中のメイン処理フローチャートの処理実行を一時中断し、当該割り込み処理を優先して実行することを意味している。そして、当該割り込み処理の実行終了後には一時中断されているメインフローチャートの処理が再開されることとなる。
Next, with reference to FIG. 47 to FIG. 56, the special movable control process of the movable body accessory executed on the sub-board side will be described. First, FIG. 47 is a flowchart of interrupt processing on the sub-board side that is executed when vibration error notification instruction information is received from the main side. First, the interrupt processing on the sub-board side in the present embodiment is the case where vibration error notification instruction information (see
次に、ステップ2010で、可動体役物特殊可動実行制御手段2325hは、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A〜D特殊可動準備動作未完了フラグをすべてオンにする。ここで、可動体役物A〜D特殊可動準備動作未完了フラグとは、可動体役物の特殊可動演出を実行するに際して、その準備動作を実行するためのフラグであり、当該フラグがオンとなったことを契機として、後述する可動体役物の初期位置への強制移動処理が実行されることとなる。次に、ステップ2500で、可動体役物特殊可動実行制御手段2325hは、後述する可動体役物特殊可動準備動作制御処理を実行する。次に、ステップ3500で、可動体役物特殊可動実行制御手段2325hは、後述する可動体役物特殊可動制御処理を実行する。次に、ステップ4000で、可動体役物特殊可動実行制御手段2325hは、前述のモータ・ソレノイド励磁開始制御処理を実行する。次に、ステップ4500で、可動体役物特殊可動実行制御手段2325hは、前述のモータ・ソレノイド励磁終了制御処理を実行する。次に、ステップ3000で、可動体役物特殊可動実行制御手段2325hは、前述の長期通電異常監視制御処理を実行する。次に、ステップ2020で、可動体役物特殊可動実行制御手段2325hは、メイン側からの振動エラー報知解除情報(図10のステップ1066参照)を受信したか否かを判定する。ステップ2020でYesの場合、ステップ2100で、可動体役物特殊可動実行制御手段2325hは、後述する振動エラー報知解除情報受信時処理を実行し、サブ基板側のメインフローチャートに復帰する。他方、ステップ2020でNoの場合には、ステップ2500に移行する(即ち、振動エラー報知解除情報の受信待ちループ処理となる)。以下、各処理について詳述するが、前述している処理については説明を省略する。
Next, in step 2010, the movable body accessory special movement execution control means 2325h turns on all the movable body accessories A to D special movable preparation operation incomplete flags in the movable body accessory operation state information temporary storage means 2325d. To do. Here, the movable body accessory A to D special movable preparation operation incomplete flag is a flag for executing the preparation operation when the special movable production effect of the movable body accessory is executed. As a result, the process of forcibly moving the movable body accessory to the initial position, which will be described later, is executed. Next, in
次に、図48は、図47でのステップ2500のサブルーチンに係る、可動体役物特殊可動準備動作制御処理のフローチャートである。まず、ステップ2600で、特殊可動準備動作実行制御手段2325h−1は、後述する特殊可動準備動作時動作内容決定処理を実行する。次に、ステップ2700で、特殊可動準備動作実行制御手段2325h−1は、後述する特殊可動準備動作時動作開始制御処理を実行する。次に、ステップ2800で、特殊可動準備動作実行制御手段2325h−1は、後述する特殊可動準備動作時動作終了制御処理を実行し、次の処理(ステップ3500の可動体役物特殊可動制御処理)に移行する。
Next, FIG. 48 is a flowchart of the movable body accessory special movable preparation operation control process according to the subroutine of
次に、図49は、図48でのステップ2600のサブルーチンに係る、特殊可動準備動作時動作内容決定処理のフローチャートである。まず、ステップ2602で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A〜D特殊可動準備動作未完了フラグの内の何れのフラグがオンであるかを判定し、当該判定結果に基づき異なる処理を実行する。ここで、当該判定の実行に際しては、「可動体役物A特殊可動準備動作未完了フラグ」、「可動体役物C特殊可動準備動作未完了フラグ」、「可動体役物B特殊可動準備動作未完了フラグ」、「可動体役物D特殊可動準備動作未完了フラグ」の順に実行する。尚、何れのフラグもオンでない場合には、次の処理(ステップ2700の特殊可動準備動作時動作開始制御処理)に移行する。
Next, FIG. 49 is a flowchart of operation content determination processing during the special movable preparatory operation according to the subroutine of
次に、ステップ2602で「可動体役物A特殊可動準備動作未完了フラグ」がオンである場合、ステップ2620で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Aの現在位置情報及び可動体役物Aの初期位置情報に基づき、可動体役物Aを初期位置まで移動可能な駆動ステップ数を導出すると共に、当該導出したステップ数を可動体役物動作状態情報一時記憶手段2325d内のステップカウンタAにセットする。次に、ステップ2622で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A特殊可動準備動作未完了フラグをオフにする。次に、ステップ2624で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A特殊可動準備動作開始許可フラグをオンにし、次の処理(ステップ2700の特殊可動準備動作時動作開始制御処理)に移行する。
Next, when the “movable body accessory A special movable preparation operation incomplete flag” is ON in step 2602, in step 2620, the special movable preparation operation execution control means 2325 h-1 temporarily moves the movable body accessory operation state information. Based on the current position information of the movable body accessory A in the storage means 2325d and the initial position information of the movable body accessory A, the number of drive steps capable of moving the movable body accessory A to the initial position is derived and derived. The number of steps is set in the step counter A in the movable article operating state information temporary storage means 2325d. Next, in step 2622, the special movable preparation operation execution control means 2325h-1 turns off the movable body accessory A special movable preparation operation incomplete flag in the movable body accessory operation state information temporary storage means 2325d. Next, in
次に、ステップ2602で「可動体役物C特殊可動準備動作未完了フラグ」がオンである場合、ステップ2640で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Cの現在位置情報及び可動体役物Cの初期位置情報に基づき、可動体役物Cを初期位置まで移動可能な駆動ステップ数を導出すると共に、当該導出したステップ数を可動体役物動作状態情報一時記憶手段2325d内のステップカウンタCにセットする。次に、ステップ2642で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物C特殊可動準備動作未完了フラグをオフにする。次に、ステップ2644で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物C特殊可動準備動作開始許可フラグをオンにし、次の処理(ステップ2700の特殊可動準備動作時動作開始制御処理)に移行する。 Next, when the “movable body accessory C special movable preparation operation incomplete flag” is ON in step 2602, in step 2640, the special movable preparation operation execution control means 2325 h-1 moves the movable body accessory operation state information temporarily. Based on the current position information of the movable body accessory C in the storage means 2325d and the initial position information of the movable body accessory C, the number of drive steps capable of moving the movable body accessory C to the initial position is derived and derived. The number of steps is set in a step counter C in the movable article operating state information temporary storage means 2325d. Next, in step 2642, the special movable preparation operation execution control unit 2325h-1 turns off the movable body accessory C special movable preparation operation incomplete flag in the movable body accessory operation state information temporary storage unit 2325d. Next, in Step 2644, the special movable preparation operation execution control means 2325h-1 turns on the movable body accessory C special movable preparation operation start permission flag in the movable body accessory operation state information temporary storage means 2325d. The process proceeds to the process (operation start control process at the time of special movable preparatory operation in step 2700).
次に、ステップ2602で「可動体役物B特殊可動準備動作未完了フラグ」がオンである場合、ステップ2660で、特殊可動準備動作実行制御手段2325h−1は、可動体役物Bに係る所定の励磁時間を、可動体役物動作状態情報一時記憶手段2325d内の励磁期間タイマBにセットする。次に、ステップ2662で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物B特殊可動準備動作未完了フラグをオフにする。次に、ステップ2664で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物B特殊可動準備動作開始許可フラグをオンにし、次の処理(ステップ2700の特殊可動準備動作時動作開始制御処理)に移行する。
Next, when the “movable body accessory B special movable preparation operation incomplete flag” is ON in step 2602, the special movable preparation operation execution control means 2325 h-1 determines a predetermined condition relating to the movable body accessory B in
次に、ステップ2602で「可動体役物D特殊可動準備動作未完了フラグ」がオンである場合、ステップ2680で、特殊可動準備動作実行制御手段2325h−1は、可動体役物Dに係る所定の励磁時間を、可動体役物動作状態情報一時記憶手段2325d内の励磁期間タイマDにセットする。次に、ステップ2682で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物D特殊可動準備動作未完了フラグをオフにする。次に、ステップ2684で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物D特殊可動準備動作開始許可フラグをオンにし、次の処理(ステップ2700の特殊可動準備動作時動作開始制御処理)に移行する。
Next, when the “movable body accessory D special movable preparation operation incomplete flag” is ON in step 2602, the special movable preparation operation execution control means 2325 h-1 determines the predetermined thing related to the movable body accessory D in
次に、図50は、図48でのステップ2700のサブルーチンに係る、特殊可動準備動作時動作開始制御処理のフローチャートである。まず、ステップ2702で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A〜D特殊可動準備動作開始許可フラグの内の何れのフラグがオンであるかを判定し、当該判定結果に基づき異なる処理を実行する。ここで、当該判定の実行に際しては、「可動体役物A特殊可動準備動作開始許可フラグ」、「可動体役物C特殊可動準備動作開始許可フラグ」、「可動体役物B特殊可動準備動作開始許可フラグ」、「可動体役物D特殊可動準備動作開始許可フラグ」の順に実行する。尚、何れのフラグもオンでない場合には、次の処理(ステップ2800の特殊可動準備動作時動作終了制御処理)に移行する。
Next, FIG. 50 is a flowchart of the operation start control process during the special movable preparatory operation according to the subroutine of
次に、ステップ2702で「可動体役物A特殊可動準備動作開始許可フラグ」がオンである場合、ステップ2722で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A特殊可動準備動作中フラグをオンにする。次に、ステップ2724で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A特殊可動準備動作開始許可フラグをオフにする。次に、ステップ2726で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A動作中フラグをオンにし、次の処理(ステップ2800の特殊可動準備動作時動作終了制御処理)に移行する。
Next, when the “movable body accessory A special movable preparation operation start permission flag” is ON in
次に、ステップ2702で「可動体役物C特殊可動準備動作開始許可フラグ」がオンである場合、ステップ2742で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物C特殊可動準備動作中フラグをオンにする。次に、ステップ2744で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物C特殊可動準備動作開始許可フラグをオフにする。次に、ステップ2746で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物C動作中フラグをオンにし、次の処理(ステップ2800の特殊可動準備動作時動作終了制御処理)に移行する。
Next, when the “movable body accessory C special movable preparation operation start permission flag” is ON in
次に、ステップ2702で「可動体役物B特殊可動準備動作開始許可フラグ」がオンである場合、ステップ2762で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物B特殊可動準備動作中フラグをオンにする。次に、ステップ2764で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物B特殊可動準備動作開始許可フラグをオフにする。次に、ステップ2766で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物B動作中フラグをオンにし、次の処理(ステップ2800の特殊可動準備動作時動作終了制御処理)に移行する。
Next, when the “movable body accessory B special movable preparation operation start permission flag” is ON in
次に、ステップ2702で「可動体役物D特殊可動準備動作開始許可フラグ」がオンである場合、ステップ2782で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物D特殊可動準備動作中フラグをオンにする。次に、ステップ2784で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物D特殊可動準備動作開始許可フラグをオフにする。次に、ステップ2786で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物D動作中フラグをオンにし、次の処理(ステップ2800の特殊可動準備動作時動作終了制御処理)に移行する。
Next, when the “movable body accessory D special movable preparation operation start permission flag” is turned on in
次に、図51は、図48でのステップ2800のサブルーチンに係る、特殊可動準備動作時動作終了制御処理のフローチャートである。まず、ステップ2802で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A〜D特殊可動準備動作中フラグの内の何れのフラグがオンであるかを判定し、当該判定結果に基づき異なる処理を実行する。ここで、当該判定の実行に際しては、「可動体役物A特殊可動準備動作中フラグ」、「可動体役物C特殊可動準備動作中フラグ」、「可動体役物B特殊可動準備動作中フラグ」、「可動体役物D特殊可動準備動作中フラグ」の順に実行する。ここで、このような順序を設定することで、可動体役物の特殊可動時においても、互いに干渉し得る可動体役物(本実施形態では、可動体役物A及びC)の干渉動作を回避することができるのである。尚、何れのフラグもオンでない場合には、次の処理(ステップ3500の可動体役物特殊可動制御処理)に移行する。
Next, FIG. 51 is a flowchart of the operation end control process during the special movable preparation operation according to the subroutine of
次に、ステップ2802で「可動体役物A特殊可動準備動作中フラグ」がオンである場合、ステップ2822で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内を参照し、可動体役物Aの現在位置が初期位置であるか否かを判定する。ステップ2822でYesの場合、ステップ2824で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A動作中フラグをオフにする。次に、ステップ2826で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A特殊可動準備動作中フラグをオフにし、次の処理(ステップ3500の可動体役物特殊可動制御処理)に移行する。他方、ステップ2822でNoの場合、ステップ2828で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内のステップカウンタAを参照し、可動体役物Aの特殊可動準備動作における予定動作(駆動ステップ数)分の動作が終了したか否かを判定する。ステップ2828でYesの場合には、ステップ2824に移行し、ステップ2828でNoの場合には、次の処理(ステップ3500の可動体役物特殊可動制御処理)に移行する。
Next, when the “movable body accessory A special movable preparation operation in-progress flag” is ON in step 2802, in step 2822, the special movable preparation operation execution control means 2325 h-1 temporarily stores the movable body accessory operation state information. With reference to the inside of the means 2325d, it is determined whether or not the current position of the movable accessory A is the initial position. In the case of Yes in step 2822, in step 2824, the special movable preparation operation execution control unit 2325h-1 turns off the movable object combination A operating flag in the movable object combination operation state information temporary storage unit 2325d. Next, in
次に、ステップ2802で「可動体役物C特殊可動準備動作中フラグ」がオンである場合、ステップ2842で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内を参照し、可動体役物Cの現在位置が初期位置であるか否かを判定する。ステップ2842でYesの場合、ステップ2844で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物C動作中フラグをオフにする。次に、ステップ2846で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物C特殊可動準備動作中フラグをオフにし、次の処理(ステップ3500の可動体役物特殊可動制御処理)に移行する。他方、ステップ2842でNoの場合、ステップ2848で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内のステップカウンタCを参照し、可動体役物Cの特殊可動準備動作における予定動作(駆動ステップ数)分の動作が終了したか否かを判定する。ステップ2848でYesの場合には、ステップ2844に移行し、ステップ2848でNoの場合には、次の処理(ステップ3500の可動体役物特殊可動制御処理)に移行する。
Next, when the “movable body accessory C special movable preparation operation in-progress flag” is ON in step 2802, in
次に、ステップ2802で「可動体役物B特殊可動準備動作中フラグ」がオンである場合、ステップ2862で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内を参照し、可動体役物Bの現在位置が初期位置であるか否かを判定する。ステップ2862でYesの場合、ステップ2864で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物B動作中フラグをオフにする。次に、ステップ2866で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物B特殊可動準備動作中フラグをオフにし、次の処理(ステップ3500の可動体役物特殊可動制御処理)に移行する。他方、ステップ2862でNoの場合、ステップ2868で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内の励磁期間タイマBを参照し、可動体役物Bの特殊可動準備動作における予定動作(励磁期間)分の動作が終了したか否かを判定する。ステップ2868でYesの場合には、ステップ2864に移行し、ステップ2868でNoの場合には、次の処理(ステップ3500の可動体役物特殊可動制御処理)に移行する。
Next, when the “movable body accessory B special movable preparation operation in-progress flag” is ON in step 2802, in
次に、ステップ2802で「可動体役物D特殊可動準備動作中フラグ」がオンである場合、ステップ2882で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内を参照し、可動体役物Dの現在位置が初期位置であるか否かを判定する。ステップ2882でYesの場合、ステップ2884で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物D動作中フラグをオフにする。次に、ステップ2886で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物D特殊可動準備動作中フラグをオフにし、次の処理(ステップ3500の可動体役物特殊可動制御処理)に移行する。他方、ステップ2882でNoの場合、ステップ2888で、特殊可動準備動作実行制御手段2325h−1は、可動体役物動作状態情報一時記憶手段2325d内の励磁期間タイマDを参照し、可動体役物Dの特殊可動準備動作における予定動作(励磁期間)分の動作が終了したか否かを判定する。ステップ2888でYesの場合には、ステップ2884に移行し、ステップ2888でNoの場合には、次の処理(ステップ3500の可動体役物特殊可動制御処理)に移行する。
Next, when the “movable body accessory D special movable preparation operation in-progress flag” is ON in step 2802, the special movable preparation operation execution control means 2325h-1 temporarily stores the movable body accessory operation state information in step 2882. Referring to the inside of the means 2325d, it is determined whether or not the current position of the movable body accessory D is the initial position. In the case of Yes in step 2882, in
次に、図52は、図47でのステップ3500のサブルーチンに係る、可動体役物特殊可動制御処理のフローチャートである。まず、ステップ3600で、特殊可動実行制御手段2325h−2は、後述する特殊可動時動作内容決定処理を実行する。次に、ステップ3700で、特殊可動実行制御手段2325h−2は、後述する特殊可動時動作開始制御処理を実行する。次に、ステップ3800で、特殊可動実行制御手段2325h−2は、後述する特殊可動時動作終了制御処理を実行し、次の処理(ステップ4000のモータ・ソレノイド励磁開始制御処理)に移行する。
Next, FIG. 52 is a flowchart of the movable body accessory special movement control process according to the subroutine of
次に、図53は、図52でのステップ3600のサブルーチンに係る、特殊可動時動作内容決定処理のフローチャートである。まず、ステップ3602で、特殊可動実行制御手段2325h−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A〜D特殊可動準備動作中フラグの全てのフラグがオフであるか否かを判定する。ステップ3602Yesの場合、ステップ3604で、特殊可動実行制御手段2325h−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A〜D特殊可動動作中フラグの全てのフラグがオフであるか否かを判定する。ステップ3604Yesの場合、ステップ3606で、特殊可動実行制御手段2325h−2は、可動体役物動作状態情報一時記憶手段2325dを参照し、初期動作関連のフラグがオフ(初期動作実行が完了しており初期動作済み)であり、且つエラー関連のフラグがオフ(エラー未発生又はエラー解消済み)である可動体役物A〜Dの内の何れかを特殊可動させる可動体役物(以下、特殊可動対象役物と呼ぶ)として決定する。次に、ステップ3608で、特殊可動実行制御手段2325h−2は、特殊可動対象役物の夫々について、通常時の動作内容(初期動作、エラー解消動作、演出動作)とは異なる特殊演出動作内容を決定する。次に、ステップ3610で、特殊可動実行制御手段2325h−2は、特殊可動対象役物の夫々を、即時動作させるよう可動タイミングを決定する。ここで、当該可動タイミングを決定する理由は、演出動作時における可動体役物の動作内容とは異なり、装飾図柄の変動態様と連動させる必要がなく、特殊可動させる趣旨がエラー報知を行うことであるため、速やかに特殊可動の動作を開始させる必要があるためである。次に、ステップ3612で、特殊可動実行制御手段2325h−2は、特殊可動対象役物の夫々について、ステップ3608で決定した特殊演出動作内容に基づき駆動ステップ数(又は励磁時間)を導出すると共に、当該導出した内容を可動体役物動作状態情報一時記憶手段2325d内のステップカウンタ(又は励磁期間タイマ)にセットする。次に、ステップ3614で、特殊可動実行制御手段2325h−2は、特殊可動対象役物に係る可動体役物A〜D特殊可動動作開始許可フラグをオンにし、次の処理(ステップ3700の特殊可動時動作開始制御処理)に移行する。尚、ステップ3602又はステップ3604でNoの場合には、次の処理(ステップ3700の特殊可動時動作開始制御処理)に移行する。
Next, FIG. 53 is a flowchart of the operation content determination process during special movement according to the subroutine of
尚、特殊演出動作の態様は、初期動作、エラー解消動作及び演出動作の動作態様と異なる(初期動作内容決定用参照テーブル2325b−1−1、エラー解消動作内容決定用参照テーブル2325b−1−1、演出動作内容決定用参照テーブル2325c−1−1で定められた動作態様と異なる動作態様)ものであれば、特に限定されないが、特殊可動させる趣旨がエラー報知を行うことであるため、可動体役物の駆動ステップ数が大きい(LED等を搭載している場合には全てのLEDを点滅させる)等の態様とすることが好適である。また、演出表示装置2140を遮蔽する位置に移動させる態様とすることでエラー報知効果を高めることも可能である。また、可動体役物を初期位置からの最大移動位置(最大突出量)にて固定するよう構成してもよく、エラー報知効果を更に高めるためには好適である。尚、特殊演出動作時には、可動体役物エラー報知手段(表ユニット対応)232−31又は可動体役物エラー報知手段(裏ユニット対応)232−32にて可動体役物に係るエラー報知が実行されないため、当該特殊演出動作が可動体役物の異常動作に起因したものであるのか否かを判別することが可能となるのである。
Note that the mode of the special performance operation is different from the operation modes of the initial operation, the error elimination operation, and the production operation (the initial motion content determination reference table 2325b-1-1 and the error resolution operation content determination reference table 2325b-1-1. The operation mode is not particularly limited as long as it is different from the operation mode defined in the production operation content determination reference table 2325c-1-1), but the purpose of special movement is to perform error notification, so that the movable body It is preferable that the number of driving steps of the accessory is large (when all LEDs are mounted, all the LEDs are blinked). Moreover, it is also possible to enhance the error notification effect by moving the
次に、図54は、図52でのステップ3700のサブルーチンに係る、特殊可動時動作開始制御処理のフローチャートである。まず、ステップ3702で、特殊可動実行制御手段2325h−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A〜D特殊可動動作開始許可フラグの内の何れのフラグがオンであるかを判定し、当該判定結果に基づき異なる処理を実行する。ここで、当該判定の実行に際しては、「可動体役物A特殊可動動作開始許可フラグ」、「可動体役物C特殊可動動作開始許可フラグ」、「可動体役物B特殊可動動作開始許可フラグ」、「可動体役物D特殊可動動作開始許可フラグ」の順に実行する。尚、何れのフラグもオンでない場合には、次の処理(ステップ3800の特殊可動動作時動作終了制御処理)に移行する。
Next, FIG. 54 is a flowchart of the operation start control process during special movement according to the subroutine of
次に、ステップ3702で「可動体役物A特殊可動動作開始許可フラグ」がオンである場合、ステップ3722で、特殊可動動作実行制御手段2325h−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A特殊可動動作中フラグをオンにする。次に、ステップ3724で、特殊可動動作実行制御手段2325h−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A特殊可動動作開始許可フラグをオフにする。次に、ステップ3726で、特殊可動動作実行制御手段2325h−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A動作中フラグをオンにし、次の処理(ステップ3800の特殊可動動作時動作終了制御処理)に移行する。
Next, when the “movable body accessory A special movable operation start permission flag” is ON in
次に、ステップ3702で「可動体役物C特殊可動動作開始許可フラグ」がオンである場合、ステップ3742で、特殊可動動作実行制御手段2325h−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物C特殊可動動作中フラグをオンにする。次に、ステップ3744で、特殊可動動作実行制御手段2325h−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物C特殊可動動作開始許可フラグをオフにする。次に、ステップ3746で、特殊可動動作実行制御手段2325h−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物C動作中フラグをオンにし、次の処理(ステップ3800の特殊可動動作時動作終了制御処理)に移行する。
Next, when the “movable body accessory C special movable operation start permission flag” is ON in
次に、ステップ3702で「可動体役物B特殊可動動作開始許可フラグ」がオンである場合、ステップ3762で、特殊可動動作実行制御手段2325h−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物B特殊可動動作中フラグをオンにする。次に、ステップ3764で、特殊可動動作実行制御手段2325h−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物B特殊可動動作開始許可フラグをオフにする。次に、ステップ3766で、特殊可動動作実行制御手段2325h−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物B動作中フラグをオンにし、次の処理(ステップ3800の特殊可動動作時動作終了制御処理)に移行する。
Next, when the “movable body accessory B special movable operation start permission flag” is ON in
次に、ステップ3702で「可動体役物D特殊可動動作開始許可フラグ」がオンである場合、ステップ3782で、特殊可動動作実行制御手段2325h−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物D特殊可動動作中フラグをオンにする。次に、ステップ3784で、特殊可動動作実行制御手段2325h−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物D特殊可動動作開始許可フラグをオフにする。次に、ステップ3786で、特殊可動動作実行制御手段2325h−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物D動作中フラグをオンにし、次の処理(ステップ3800の特殊可動動作時動作終了制御処理)に移行する。
Next, when the “movable body accessory D special movable operation start permission flag” is turned on in
次に、図55は、図52でのステップ3800のサブルーチンに係る、特殊可動動作時動作終了制御処理のフローチャートである。まず、ステップ3802で、特殊可動動作実行制御手段2325h−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A〜D特殊可動動作中フラグの内の何れのフラグがオンであるかを判定し、当該判定結果に基づき異なる処理を実行する。ここで、当該判定の実行に際しては、「可動体役物A特殊可動動作中フラグ」、「可動体役物C特殊可動動作中フラグ」、「可動体役物B特殊可動動作中フラグ」、「可動体役物D特殊可動動作中フラグ」の順に実行する。尚、何れのフラグもオンでない場合には、次の処理(ステップ4000のモータ・ソレノイド励磁開始制御処理)に移行する。
Next, FIG. 55 is a flowchart of the operation end control process during special movable operation according to the subroutine of
次に、ステップ3802で「可動体役物A特殊可動動作中フラグ」がオンである場合、ステップ3822で、特殊可動動作実行制御手段2325h−2は、可動体役物動作状態情報一時記憶手段2325d内のステップカウンタAを参照し、可動体役物Aの特殊可動動作における予定動作(駆動ステップ数)分の動作が終了したか否かを判定する。ステップ3822でYesの場合、ステップ3824で、特殊可動動作実行制御手段2325h−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A動作中フラグをオフにする。次に、ステップ3826で、特殊可動動作実行制御手段2325h−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物A特殊可動動作中フラグをオフにし、次の処理(ステップ4000のモータ・ソレノイド励磁開始制御処理)に移行する。他方、ステップ3822でNoの場合、ステップ3828で、特殊可動動作実行制御手段2325h−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Aに係る現在位置情報と可動体役物Cに係る現在位置情報とを比較し、可動体役物Aと可動体役物Cとが干渉しているか(或いは干渉直前であるか)否かを判定する。ステップ3828でYesの場合には、ステップ3824に移行し、ステップ3828でNoの場合には、次の処理(ステップ4000のモータ・ソレノイド励磁開始制御処理)に移行する。
Next, when the “movable body accessory A special movable operation flag” is ON in
次に、ステップ3802で「可動体役物C特殊可動動作中フラグ」がオンである場合、ステップ3842で、特殊可動動作実行制御手段2325h−2は、可動体役物動作状態情報一時記憶手段2325d内のステップカウンタCを参照し、可動体役物Cの特殊可動動作における予定動作(駆動ステップ数)分の動作が終了したか否かを判定する。ステップ3842でYesの場合、ステップ3844で、特殊可動動作実行制御手段2325h−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物C動作中フラグをオフにする。次に、ステップ3846で、特殊可動動作実行制御手段2325h−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物C特殊可動動作中フラグをオフにし、次の処理(ステップ4000のモータ・ソレノイド励磁開始制御処理)に移行する。他方、ステップ3842でNoの場合、ステップ3848で、特殊可動動作実行制御手段2325h−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物Cに係る現在位置情報と可動体役物Aに係る現在位置情報とを比較し、可動体役物Cと可動体役物Aとが干渉しているか(或いは干渉直前であるか)否かを判定する。ステップ3848でYesの場合には、ステップ3844に移行し、ステップ3848でNoの場合には、次の処理(ステップ4000のモータ・ソレノイド励磁開始制御処理)に移行する。
Next, when the “movable body accessory C special movable operation flag” is ON in
次に、ステップ3802で「可動体役物B特殊可動動作中フラグ」がオンである場合、ステップ3862で、特殊可動動作実行制御手段2325h−2は、可動体役物動作状態情報一時記憶手段2325d内の励磁期間タイマBを参照し、可動体役物Bの特殊可動動作における予定動作(励磁期間)分の動作が終了したか否かを判定する。ステップ3862でYesの場合、ステップ3864で、特殊可動動作実行制御手段2325h−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物B動作中フラグをオフにする。次に、ステップ3866で、特殊可動動作実行制御手段2325h−2は、可動体役物動作状態情報一時記憶手段2325d内の可動体役物B特殊可動動作中フラグをオフにし、次の処理(ステップ4000のモータ・ソレノイド励磁開始制御処理)に移行する。他方、ステップ3862でNoの場合には、次の処理(ステップ4000のモータ・ソレノイド励磁開始制御処理)に移行する。尚、ステップ3802で「可動体役物D特殊可動動作中フラグ」がオンである場合には、ステップ3862〜ステップ3866における処理と略同一の処理を実行するため説明を省略する。
Next, when the “movable body accessory B special movable operation flag” is ON in
次に、図56は、図47でのステップ2100のサブルーチンに係る、振動エラー報知解除情報受信時処理のフローチャートである。まず、ステップ2102で、可動体役物特殊可動実行制御手段2325hは、現在動作中にある可動体役物A〜Dの動作を全て停止する。次に、ステップ2104で、可動体役物特殊可動実行制御手段2325hは、可動体役物動作状態情報一時記憶手段2325d内の特殊可動関連のフラグを全てオフにし、サブ基板側のメインフローチャートを実行(復帰)する。
Next, FIG. 56 is a flowchart of processing for receiving vibration error notification release information according to the subroutine of step 2100 in FIG. First, in
次に、図57〜図66を参照しながら、本実施形態に係るぱちんこ遊技機の作用を説明することとする。はじめに、図57及び図58は、遊技機への電源投入時における可動体役物の初期動作に係る作用図である。また、図59〜図61は、装飾図柄変動時における可動体役物の演出動作及びエラー解消動作に係る作用図である。また、図62は、振動エラー発生時における可動体役物の特殊可動に係る作用図である。また、図63は、可動体役物のエラー解消動作時においてエラーが解消されなかった際の作用図である。そして、図64〜図66は、可動体役物動作時において過通電が発生した際の作用図である。以下、夫々の作用図について詳述する。 Next, the operation of the pachinko gaming machine according to the present embodiment will be described with reference to FIGS. First, FIG. 57 and FIG. 58 are action diagrams related to the initial operation of the movable body accessory when the power to the gaming machine is turned on. Further, FIGS. 59 to 61 are action diagrams related to the rendering operation and error elimination operation of the movable body accessory when the decorative symbol fluctuates. FIG. 62 is an operation diagram relating to special movement of the movable body accessory when a vibration error occurs. FIG. 63 is an operation diagram when the error is not eliminated during the error elimination operation of the movable body accessory. FIGS. 64 to 66 are operation diagrams when overcurrent is generated during the operation of the movable body accessory. Hereinafter, each operation diagram will be described in detail.
次に、図57の作用図について説明する。まず、遊技機への電源投入時においてサブ基板側では、図中1のタイミングにて、全ての可動体役物(本実施形態では、可動体役物A〜Dの4種類)に係る可動体役物A〜D初期動作未完了フラグがオンとなる。そして、当該フラグがオンとなったことを契機として、可動体役物A、可動体役物B及び可動体役物Dの初期動作が実行{可動体役物A、B、D初期動作中フラグ(動作中フラグ)がオン}される。ここで、可動体役物Cについては、初期動作の開始許可状態(可動体役物C初期動作開始許可フラグがオン)となるものの初期動作は実行されず、初期動作実行待機状態となる。その理由は、本実施形態では、可動体役物Aと可動体役物Cとは両者が干渉し得るよう構成されているため、可動体役物Aの動作を優先させることで両者が干渉することを回避しているのである。次に、図中2のタイミングにて、可動体役物Bが初期位置に位置していることを検出できたため、可動体役物Bの初期動作が終了する。次に、図中3のタイミングにて、可動体役物Dが初期位置に位置していることを検出できたため、可動体役物Dの初期動作が終了する。このように、可動体役物の構造に応じて初期動作に要する時間が異なるため、初期動作を開始してから順次、夫々の可動体役物の初期動作が終了していくこととなる。次に、図中4のタイミングにて、可動体役物Aが初期位置に位置していることを検出できたため、可動体役物Aの初期動作が終了する。次に、可動体役物Aの初期動作が終了したことを契機として、可動体役物Cの初期動作が実行される。このように、可動体役物Cよりも優先して実行された可動体役物Aの初期動作が終了した後に可動体役物Cの初期動作が実行されるため、両者が干渉しないことを担保できるのである。そして、図中5のタイミングにて、可動体役物Cが初期位置に位置していることを検出できたため、可動体役物Cの初期動作が終了し、全ての可動体役物の初期動作が終了することとなる。
Next, the operation diagram of FIG. 57 will be described. First, at the time of turning on the power to the gaming machine, on the sub-board side, the movable bodies related to all the movable body accessories (in this embodiment, four types of movable body accessories A to D) at the timing of 1 in the figure. The accessory A to D initial operation incomplete flag is turned on. Then, when the flag is turned on, the initial operations of the movable body accessory A, the movable body accessory B, and the movable body accessory D are executed {the movable body accessory A, B, D initial operation flag (In-operation flag) is turned on}. Here, although the movable body accessory C is in the initial operation start permitted state (the movable body accessory C initial operation start permission flag is ON), the initial operation is not executed and the movable body accessory C enters the initial operation execution standby state. The reason is that in this embodiment, the movable body accessory A and the movable body accessory C are configured so that they can interfere with each other. It avoids that. Next, since it has been detected that the movable body accessory B is located at the initial position at the
次に、図58の作用図について説明する。まず、図中1のタイミングにて、可動体役物A〜Dに係る可動体役物A〜D初期動作未完了フラグがオンとなり、可動体役物A、可動体役物B及び可動体役物Dの初期動作が実行される。次に、図中2のタイミングにて、可動体役物Bが初期位置に位置していることを検出できたため、可動体役物Bの初期動作が終了する。次に、図中3のタイミングにて、遊技球が始動口に入球し図柄変動が開始される。ここで、初期動作実行中である可動体役物A及び可動体役物Dについては、当該実行中である初期動作を中断する。そして、再度可動体役物A、D初期動作未完了フラグがオンとなることで、初期動作の開始許可状態となる。しかしながら、図柄変動が継続しているため、初期動作は実行されず、初期動作実行待機状態となる。他方、可動体役物Bは初期動作が終了しているため、可動体役物B初期動作未完了フラグはオフを維持し、再度初期動作の開始許可状態とはならない。また、可動体役物Aの初期動作終了待ちとなっている可動体役物Cについても、可動体役物C初期動作未完了フラグはオフを維持するが、既に初期動作の開始許可状態(可動体役物C初期動作開始許可フラグがオン)となっているため、可動体役物Aの初期動作終了待ち(初期動作実行待機状態)となる。次に、図中4のタイミングにて、当該図柄変動が終了する。ここで、初期動作実行待機状態となっている可動体役物A及び可動体役物Dの初期動作が再度実行される。そして、図中5〜7のタイミングにて、順次初期動作が終了していくこととなる。このように、本実施形態では、図柄変動中においては初期動作を中断するよう構成されているため、例えば、遊技機稼働中における電断・電断復帰等の状況において、遊技者が当該初期動作を演出動作と誤認してしまうことを回避することができるのである。特に、可動体役物の初期動作において、可動し得るパターン全てについてチェックするよう構成されている場合には、初期動作の動作内容は見た目が派手(例えば、駆動ステップ数が大きい、可動体役物に搭載されているLEDが全て点滅する等)なものになってしまうことが考えられる。即ち、遊技者が当該初期動作を演出動作と誤認することにより、当該図柄変動の大当り期待度が高いものと誤認してしまうのである。
Next, the operation diagram of FIG. 58 will be described. First, at the timing of 1 in the figure, the movable object combination A to D initial operation incomplete flag related to the movable object combinations A to D is turned on, and the movable object combination A, the movable object combination B, and the movable object combination are turned on. The initial operation of the object D is executed. Next, since it has been detected that the movable body accessory B is located at the initial position at the
次に、図59の作用図について説明する。まず、図中1のタイミングの直前にて、遊技球が始動口に入球し図柄変動を開始している。また、図中1のタイミングにて、装飾図柄の図柄変動演出と連動した可動体役物の演出動作実行を決定しており、本例では、可動体役物A〜Dの全てを用いて演出動作を実行するよう決定されている。ここで、本実施形態では、可動体役物Aと可動体役物Bとは連動動作し、両者が連動することで大当り期待度を表す等の意味づけがなされるよう構成されている。また、可動体役物Cと可動体役物Dとは連動動作し、両者が連動することで大当り期待度を表す等の意味づけがなされるよう構成されている。そして、可動体役物Aと可動体役物Cとは両者が干渉し得るよう構成されている。このような構成下において、演出動作内容を決定する際には、当該連動動作及び役物干渉回避の要件を満たすよう、夫々の可動体役物の動作パターン及び動作タイミングが予め定められている。次に、図中2のタイミングにて、可動体役物Aと可動体役物Bとが共に演出動作を開始する。他方、可動体役物Cは可動体役物Aの演出動作待ち状態となると共に、可動体役物Cと連動動作する可動体役物Dも演出動作待ち状態となる。次に、図中3のタイミングにて、可動体役物Aの演出動作が終了する。ここで、可動体役物Aの演出動作が終了したタイミングと略同一のタイミングにて、可動体役物Cの演出動作が実行されると共に、可動体役物Dも共に演出動作が実行される。そして、図中4のタイミングにて、図柄変動が終了するまでの所定のタイミングにおいて、可動体役物C及び可動体役物Dの演出動作が終了することとなる。
Next, the operation diagram of FIG. 59 will be described. First, immediately before the timing of 1 in the figure, the game ball enters the starting port and starts symbol variation. In addition, at the timing of 1 in the figure, the execution operation of the movable body accessory in conjunction with the design variation effect of the decorative design is determined, and in this example, the production is performed using all of the movable body accessories A to D. It has been decided to perform the action. Here, in this embodiment, the movable body accessory A and the movable body accessory B operate in conjunction with each other, and are configured to have meanings such as representing a big hit expectation degree by interlocking the both. In addition, the movable body accessory C and the movable body accessory D operate in conjunction with each other, and are configured such that meanings such as representing the degree of big hit expectation are obtained by interlocking the two. And the movable body accessory A and the movable body accessory C are comprised so that both can interfere. Under such a configuration, when determining the contents of the effect operation, the operation patterns and operation timings of the respective movable body accessories are determined in advance so as to satisfy the requirements for the interlocking operation and the object interference avoidance. Next, at the timing of 2 in the figure, both the movable body accessory A and the movable body accessory B start production operations. On the other hand, the movable body accessory C enters the state of waiting for the rendering operation of the movable body accessory A, and the movable body accessory D that operates in conjunction with the movable body facility C also enters the state of waiting for the rendering operation. Next, at the timing of 3 in the figure, the rendering operation of the movable article A ends. Here, the rendering operation of the movable body accessory C is executed at substantially the same timing as the timing when the rendering operation of the movable body accessory A is completed, and the rendering operation is also performed for both the movable body accessory D. . Then, at the
次に、図60の作用図について説明する。はじめに、同図は、図59の作用図における図中2のタイミングから図中3のタイミングまでの間で、可動体役物Aに動作異常が発生した際の作用図である。尚、説明を簡便にするため、可動体役物A及び可動体役物Cに係る作用のみを示してある。まず、図中1のタイミングにて、所定の演出動作パターンに基づき可動体役物Aが演出動作を開始すると共に、可動体役物Cが演出動作待ち状態となる。次に、図中2のタイミングの直前にて可動体役物Aに動作異常が発生したため、可動体役物Aの存在予定位置と現在位置が異なる状況となっている。次に、図中2のタイミングにて、所定の演出動作パターンに基づき可動体役物Cが演出動作を開始する。ここで、本タイミングでは、前述のように、可動体役物Cは所定の動作タイミングに基づき演出動作を開始するため、可動体役物Aに動作異常が発生している状況下においても、演出動作を開始するのである。次に、図中3のタイミングにて、可動体役物Aの存在予定位置と現在位置とを比較するエラー判定が実行される。そして、可動体役物Aにて動作異常が発生していることを検知したため、可動体役物Aのエラー解消動作の実行開始待機状態(可動体役物Aエラー解消動作開始許可フラグ)となる。しかしながら、可動体役物Cの演出動作実行中であるため、可動体役物Aのエラー解消動作が実行されず実行開始待機状態を維持する。このように、エラー解消動作の実行を要する状況下においても、可動体役物Aと可動体役物Cとが干渉することを回避することができるのである。そして、図中4のタイミングにて、可動体役物Cの演出動作が終了したことを契機として、可動体役物Aのエラー解消動作が実行され、図中5のタイミングにて、可動体役物Aの動作異常が解消されることとなる。
Next, the operation diagram of FIG. 60 will be described. First, the figure is an action diagram when an operation abnormality occurs in the movable body accessory A from the
次に、図61の作用図について説明する。はじめに、同図は、図60の作用図における図中4のタイミングから図中5のタイミングまでの間(即ち、可動体役物Aに係るエラー解消動作中)において図柄変動が発生した際の作用図である。まず、図中1のタイミングにて、可動体役物Aに係るエラー解消動作の実行が開始される。次に、図中2のタイミングにて、可動体役物Aの動作異常が解消されない内に、遊技球が始動口に入球し図柄変動が開始される。ここで、本実施形態では、遊技者が当該エラー解消動作を演出動作と誤認してしまうことを回避するため、図柄変動中においてはエラー解消動作を中断するよう構成されている。そのため、同タイミングにおいて、当該実行中である可動体役物Aのエラー解消動作を中断し、可動体役物Aエラー解消処理未完了フラグをオンとすることで、可動体役物Aはエラー解消動作の開始許可状態となる。他方、動作異常の発生していない可動体役物B、C、Dは、演出動作の実行が可能な状態であるため、可動体役物C及びDについては演出動作の開始待機状態となる。しかしながら、可動体役物Bは可動体役物Aと連動動作する必要があるため、当該図柄変動中には演出動作の実行不可状態である可動体役物Aとの整合性を図ることを目的とし、可動体役物Bは演出動作の実行許可が下りないこととなる。次に、図中3のタイミングにて、可動体役物Cの演出動作が実行されると共に、可動体役物Dも共に演出動作が実行され、図柄変動が終了するまでの所定のタイミングにおいて、可動体役物C及び可動体役物Dの演出動作が終了することとなる。そして、図中4のタイミングにて、可動体役物Aのエラー解消動作が実行され、図中5のタイミングにて、可動体役物Aの動作異常が解消されることとなる。このように、動作異常が発生したある可動体役物について実行しているエラー解消動作は、図柄変動中においては実行中断(又は実行を開始しない)すると共に、演出動作において当該ある可動体役物と連動動作する他の可動体役物は、当該図柄変動中において演出動作を実行しないこととなる。
Next, the operation diagram of FIG. 61 will be described. First, the figure shows the action when the symbol variation occurs in the action diagram of FIG. 60 from the
次に、図62の作用図について説明する。まず、図中1のタイミングにて、メイン側にて遊技機への振動印加に起因した振動エラーが検出される。ここで、メイン側では、当該振動エラーの検出を契機として遊技禁止状態へ移行し、所定期間に亘って当該遊技禁止状態を保持している。このような状況下、図中1のタイミングにて、メイン側から送信された振動エラー発生に係る情報を受信したサブ側では、可動体役物A〜D特殊可動準備動作フラグが全てオンとなる。次に、図中2のタイミングにて、可動体役物A〜D特殊可動準備動作フラグがオンとなったことを契機として、可動体役物A〜Dの夫々を初期位置へと強制的に移動する。次に、図中3のタイミングにて、可動体役物A〜Dの全てが初期位置に位置することを検出した後、可動体役物A〜D特殊可動動作開始許可フラグが全てオンとなる。そして、当該フラグがオンとなったことを契機として、所定の特殊可動パターンに基づき、可動体役物A〜Dの夫々が特殊可動を開始する。次に、図中4のタイミングにて、所定の特殊可動パターンに基づく可動体役物A〜Dの特殊可動が終了するが、メイン側では未だ遊技禁止状態を保持している状態であるため、再び所定の特殊可動パターンに基づき、可動体役物A〜Dの夫々が特殊可動を開始する。そして、図中5のタイミングにおいても、再び所定の特殊可動パターンに基づき、可動体役物A〜Dの夫々が特殊可動を開始するが、その直後である図中6のタイミングにおいて、メイン側での遊技禁止状態が解除される。そして、メイン側から送信された振動エラー解除に係る情報を受信したサブ側では、可動体役物A〜Dの特殊可動を終了し、通常の動作に復帰することとなる。このように、本実施形態では、エラー発生時において、当該エラーが発生した旨を可動体役物の特殊可動パターンを実行することで報知しているのである。
Next, the operation diagram of FIG. 62 will be described. First, at the timing of 1 in the figure, a vibration error due to vibration application to the gaming machine is detected on the main side. Here, the main side shifts to the game prohibited state triggered by the detection of the vibration error, and holds the game prohibited state for a predetermined period. Under such circumstances, on the sub-side that has received the information related to the occurrence of the vibration error transmitted from the main side at the
次に、図63の作用図について説明する。まず、図中1のタイミングにて、所定の演出動作パターンに基づき可動体役物Aが演出動作を開始する。次に、図中2のタイミングにて、可動体役物Aの存在予定位置と現在位置とを比較するエラー判定が実行され、可動体役物Aにて動作異常が発生していることを検知したため、可動体役物Aのエラー解消動作を実行する。ここで、可動体役物Aにて動作異常が発生していることを検知したことを契機として、当該動作異常の発生回数をカウントする動作異常累積カウンタAに1(現在値1)が加算される。次に、図中3のタイミングにて、所定のエラー解消動作が終了するが、可動体役物Aの動作異常が解消されていないため、再び所定のエラー解消動作を開始する。また、動作異常累積カウンタAに1(現在値2)が加算される。次に、図中4のタイミングにおいても、可動体役物Aの動作異常が解消されていないため、再び所定のエラー解消動作を開始する。ここで、動作異常累積カウンタAに1(現在値3)が加算されると共に、当該カウンタ値が所定値3以上となったため、可動体役物Aに係るエラー報知を実行すると共に、動作異常累積カウンタAがゼロクリアされることとなる。このように、可動体役物に係る動作異常を検出した際には、当該動作異常を解消するための所定のエラー解消動作を繰り返すと共に、当該繰り返し回数が所定数以上となった場合にはエラー報知が実行されるのである。
Next, the operation diagram of FIG. 63 will be described. First, at the
次に、図64の作用図について説明する。まず、図中1のタイミングにて、所定の演出動作パターンに基づき可動体役物A及び可動体役物Cの動作内容及び動作タイミングが決定される。次に、図中2のタイミングにて、所定の動作タイミングに基づき可動体役物Aが演出動作を開始する。ここで、可動体役物Aは2つのモータを駆動源として駆動するため、夫々のモータに対して励磁パルス信号が送信される。そして、本タイミングでの駆動モータ数(現在値2)が所定値(本例では3)未満であるため、当該夫々のモータに対する制御信号はHレベルに維持され、励磁パルス信号に基づいた励磁電力が夫々のモータに印加される。次に、図中3のタイミングにて、可動体役物Aの演出動作が終了するよりも以前に、可動体役物Cが演出動作を開始している。ここで、本来であれば、このような動作とならないよう可動体役物A及び可動体役物Cの動作タイミングが設定されているため、ここではサブ側プログラムの誤動作等が発生したことを想定している。このような状況下において、1つのモータを駆動源として駆動する可動体役物Cの演出動作が開始されたため、本タイミングでの駆動モータ数(現在値3)が所定値以上となる。そして、駆動モータ数が所定値以上となったことを契機として、当該1つのモータに対しては励磁パルス信号が送信されるものの、制御信号がHレベルからLレベルに切り替わる。その結果、当該1つのモータに対して励磁電力が印加されないこととなり、可動体役物Cの駆動が回避されている。次に、図中4のタイミングにて、可動体役物Aの演出動作が終了し、可動体役物Aの駆動源である2つのモータ駆動が終了する。ここで、可動体役物Cは所定の動作内容に基づく演出動作実行中であるため、本タイミングでの駆動モータ数(現在値1)が所定値未満となり、可動体役物Cの駆動源である1つのモータに対して励磁電力の印加が開始される。そして、図中5のタイミングにて、可動体役物Cの演出動作が終了するまで、所定の動作内容に基づく可動体役物Cの演出動作が実行されることとなる。このように、本実施形態では、現時点で駆動しているモータ数を把握すると共に、当該駆動しているモータ数と新たに駆動させるモータ数とを加算した結果、所定数以上となった場合には、当該新たに駆動させるモータに対して励磁電力を印加することを回避するよう構成されている。その結果、サブ側プログラムの誤動作等による不測の事態が発生した場合であっても、所定の励磁電力の上限値を超過した駆動源への電力供給を回避することができるのである。
Next, the operation diagram of FIG. 64 will be described. First, at the timing of 1 in the figure, the operation contents and the operation timing of the movable body accessory A and the movable body accessory C are determined based on a predetermined performance operation pattern. Next, at the
次に、図65の作用図について説明する。同図は、図64の作用図において、所定の励磁電力の上限値を超過した駆動源への電力供給を回避するという観点における変更例となる。尚、説明を簡便にするため、可動体役物B及び可動体役物Dに係る作用のみを示してある。はじめに、本実施形態では、可動体役物B及び可動体役物Dはソレノイドを駆動源として駆動しており、両者が略同一のタイミングで動作することがある(図62参照)。このような構成下においては、夫々のソレノイドに対して送信する励磁パルス信号において、Hレベルとなる区間が重複しないよう制御することが可能である。例えば、図中1のタイミングにて、所定の演出動作パターンに基づき可動体役物B及び可動体役物Dの動作内容及び動作タイミングが決定され、図中2のタイミングにて、可動体役物B及び可動体役物Dが略同一のタイミングで演出動作を開始する。ここで、可動体役物B及び可動体役物Dの演出動作が終了するまで、夫々の可動体役物の駆動源であるソレノイドに対しては、励磁パルス信号においてHレベルとなる区間が重複しないよう制御される。例えば、図中3のタイミングにおいては、可動体役物Bの駆動源であるソレノイドに対してHレベルの励磁パルス信号が送信されると共に、可動体役物Dの駆動源であるソレノイドに対してLレベルの励磁パルス信号が送信される。他方、図中4のタイミングにおいては、可動体役物Bの駆動源であるソレノイドに対してLレベルの励磁パルス信号が送信されると共に、可動体役物Dの駆動源であるソレノイドに対してHレベルの励磁パルス信号が送信される。その結果、可動体役物B及び可動体役物Dの演出動作開始から演出動作終了までの間、夫々のソレノイドに対して供給される励磁電力の合計値は、一定の電力値を超過しないことを担保することが可能となるのである。
Next, the operation diagram of FIG. 65 will be described. This figure is an example of a change from the viewpoint of avoiding the supply of power to the drive source exceeding the upper limit value of the predetermined excitation power in the operation diagram of FIG. In order to simplify the description, only the actions related to the movable body accessory B and the movable body accessory D are shown. First, in the present embodiment, the movable body accessory B and the movable body accessory D are driven using a solenoid as a drive source, and both may operate at substantially the same timing (see FIG. 62). Under such a configuration, it is possible to control the excitation pulse signals transmitted to the respective solenoids so as not to overlap the H level sections. For example, at the
次に、図66の作用図について説明する。はじめに、本実施形態では、夫々の可動体役物の駆動源に対して送信された励磁パルス信号(又は励磁電力)の履歴情報を蓄積するよう構成されており、当該蓄積された履歴情報に基づき、所定期間内における励磁電力の供給期間を導出できるよう構成されている。尚、説明を簡便にするため、可動体役物Bに係る作用のみを示してある。まず、図中1のタイミングにて、所定の動作内容及び動作タイミングに基づき可動体役物Bの演出動作が実行され、図中2のタイミングにて、当該演出動作が終了する。ここで、当該可動体役物Bの演出動作実行中において、可動体役物Bの駆動源であるソレノイドに対して供給された励磁電力の履歴情報に基づき「所定期間内における励磁電力の供給期間/所定期間」を導出した場合、励磁電力の供給期間と比例して当該割合が増加していく。また、図中2のタイミングから図中3のタイミングまでは、ソレノイドに対して励磁電力が供給されないため、励磁電力の非供給期間と比例して当該割合が減少していく。次に、図中3のタイミングにて、別の図柄変動時において所定の動作内容及び動作タイミングに基づき可動体役物Bの演出動作が実行され、図中4のタイミングにて、当該演出動作が終了する。本来は、ソレノイドに対して過度の励磁電力を供給しないよう設計されているため、このように、当該割合が増加と減少とを繰り返し、所定値を超えることはない。しかしながら、サブ側プログラムの誤動作等による不測の事態が発生した場合には、その限りではなく、例えば、図中5及び図中6のタイミングのように、図柄変動が実行されていない期間においてソレノイドに対して励磁電力が供給されることが考えられる。本実施形態では、このような状況下においても、励磁電力の履歴情報を蓄積しているため、当該区間においても、励磁電力の供給期間と比例して当該割合が増加していく。ここで、本タイミングでは、当該割合が所定値を超えていないため、ソレノイドに対する励磁電力の供給が容認されている。しかしながら、このような不測の事態が繰り返される(図中9〜図中10)、或いはソレノイドへの励磁電力の供給が継続して行われるといった不具合の可能性が高まる状況下においては、当該割合が所定値を超えることとなり、ソレノイドに対する励磁電力の供給が停止される(図中11〜図中12)。このように、サブ側プログラムの誤動作等による不測の事態が発生した場合であっても、駆動源の焼損につながるような過通電の発生を回避することができるのである。
Next, the operation diagram of FIG. 66 will be described. First, in the present embodiment, the history information of the excitation pulse signal (or excitation power) transmitted to the driving source of each movable body accessory is configured to be accumulated, and based on the accumulated history information. The excitation power supply period within a predetermined period can be derived. For the sake of simplicity, only the action related to the movable body accessory B is shown. First, at the
本実施形態によれば、主遊技側エラー情報送信手段からエラーが検出された旨の情報を副遊技制御部側で受信した場合には、副遊技制御部側で管理する可変部材を用い、副遊技用識別情報の変動表示時とは異なった特定変位態様で変位させる制御を実行可能に構成されているので、ホール関係者にも不正行為実施者のいずれにとっても分かり易い、従来とは全く異なる新たな報知手段を備えたぱちんこ遊技機を提供することができるという効果を奏する。 According to the present embodiment, when information indicating that an error has been detected from the main game side error information transmission means is received by the sub game control unit, the variable member managed by the sub game control unit is used. Since it is configured to be able to execute a control that causes a displacement in a specific displacement mode different from that when the game identification information is displayed in a variable manner, it is easy to understand for both the hall personnel and the cheating agent. There is an effect that a pachinko gaming machine provided with a new notification means can be provided.
更に、エラー報知対象可変部材以外の可変部材であるエラー報知対象外可変部材に関しては、エラー報知対象可変部材が特定変位態様で変位動作を実行している状況下では、エラー報知対象外可変部材が変位動作を実行している場合には当該変位動作を中止し、エラー報知対象外可変部材が変位動作を実行していない場合には以後の変位動作の実行を禁止するよう構成されているので、特定変位態様での変位動作を最優先して実行することが可能となり、報知効果を更に高めることができるという効果を奏する。加えて、主に不正行為に起因した振動エラーの報知として、可動体役物を駆動させる形態を採用したことにより、外部からの不正識別を容易に行うことができ、不正に対する抑止効果を向上させることができる。なお、本実施例では振動エラーについてのみを例示したが、不正行為に起因する他のエラー(磁石検知によるエラー、賞球過剰払出エラー、貸出機からの異常入力信号受信時のエラー等)の場合にもエラー報知を行うよう構成してもよい。その場合には、夫々のエラーに対応した異なるエラー報知態様としてもよいし、共通のエラー報知態様としてもよい。 Further, regarding the error notification non-target variable member that is a variable member other than the error notification target variable member, the error notification non-target variable member may be used in a situation where the error notification target variable member performs a displacement operation in a specific displacement mode. When the displacement operation is being performed, the displacement operation is stopped, and when the error notification non-target variable member is not performing the displacement operation, the subsequent displacement operation is prohibited. The displacement operation in the specific displacement mode can be executed with the highest priority, and the notification effect can be further enhanced. In addition, by adopting a form of driving a movable object as a notification of vibration error mainly due to fraud, it is possible to easily identify fraud from the outside and improve the deterrent effect against fraud be able to. In this embodiment, only the vibration error is illustrated, but in the case of other errors caused by fraud (such as an error due to magnet detection, an excessive payout error, an error when receiving an abnormal input signal from the lending machine, etc.) Alternatively, error notification may be performed. In that case, it is good also as a different error alerting | reporting aspect corresponding to each error, and good also as a common error alerting | reporting aspect.
更に、エラー報知対象可変部材が特定変位態様で変位動作を実行した際、当該エラー報知対象可変部材が副遊技用識別情報の変動表示部を遮蔽するよう構成されているため、報知効果を更に高めることができるという効果を奏する。 Furthermore, when the error notification target variable member performs a displacement operation in a specific displacement mode, the error notification target variable member is configured to shield the variation display portion of the sub-game identification information, thereby further enhancing the notification effect. There is an effect that can be.
本実施形態によれば、所定タイミング又は所定期間内で第一の可変部材及び/又は第二の可変部材を変位させることを決定した場合でも、第一の可変部材又は第二の可変部材を変位させた際に他方の位置が干渉位置にないことが可変部材位置検知手段により検知できないときには、当該一方の変位動作を実行しないか又は中止する制御を実行可能に構成されているため、可動体役物の干渉を効率的に回避可能なぱちんこ遊技機を提供することができるという効果を奏する。また、ある可動体役物と当該ある可動体役物と連動動作する他の可動体役物を備える場合、何れか一方の可動体役物の異常動作を検出した際には、関連する他方の可動体役物の動作を禁止するよう構成することで、可動体役物の動作異常に起因して遊技者が大当たり信頼度を誤認してしまうような事態を防止することもできる。 According to this embodiment, even when it is determined to displace the first variable member and / or the second variable member within a predetermined timing or within a predetermined period, the first variable member or the second variable member is displaced. When the variable member position detecting means cannot detect that the other position is not in the interference position, the movable member can be controlled so as not to execute or cancel one of the displacement operations. There is an effect that it is possible to provide a pachinko gaming machine that can efficiently avoid interference of objects. In addition, in the case of providing a movable body accessory and another movable body accessory that operates in conjunction with the certain movable body accessory, when an abnormal operation of any one of the movable body accessories is detected, By configuring so that the operation of the movable body accessory is prohibited, it is possible to prevent a situation in which the player misidentifies the jackpot reliability due to the abnormal operation of the movable body accessory.
本実施形態によれば、可変部材に係る異常動作の発生を検出した場合、異常動作が発生した可変部材がいずれのユニットに属するかに関する情報を出力するよう構成されているため、何れのユニットを交換すべきかをホール運営者側が判断することが容易になるという効果を奏する。特に、本実施例のように異常報知を行うLEDの配線と可変部材の配線(センサ用配線、駆動信号用配線、電源供給配線の大部分又は全部)とを区分することにより、コネクタの接触不良等により報知手段と可変部材との双方が同時に異常に陥る可能性を低減することができる。 According to the present embodiment, when the occurrence of an abnormal operation related to the variable member is detected, the unit is configured to output information regarding which unit the variable member in which the abnormal operation has occurred. There is an effect that it becomes easy for the hall operator to determine whether or not to replace. In particular, as shown in this embodiment, by separating the LED wiring for notifying abnormality and the wiring of the variable member (sensor wiring, driving signal wiring, most or all of the power supply wiring), connector contact failure Thus, the possibility that both the notification means and the variable member are abnormal at the same time can be reduced.
本実施形態によれば、主遊技制御部から送信された主遊技用識別情報の停止識別情報に関する情報と変動態様に関する情報とに基づき、主遊技用識別情報の変動態様の結果と停止識別情報とが整合しているか否かを判定し、整合していないと判定した場合には、副遊技用識別情報の停止識別情報として、特定態様及び非特定態様のいずれとも異なる複数の副遊技用識別子の組み合わせであり且つ第一の副遊技用識別子として所定の複数候補のいずれかの副遊技用識別子と残りの副遊技用識別子として特定態様及び非特定態様での副遊技用識別子にもなり得る副遊技用識別子との組み合わせである特殊態様を割り当てる制御を実行するよう構成されているため、主遊技制御部から送信された情報が不正な情報であることを副遊技制御部で検出した場合において、遊技者に与えるインパクトを最小限に留めつつ、当該検出した旨を速やかに報知することができる。更に、ノイズなどにより偶発的にコマンド受信異常が生じても遊技者からは単なるハズレ図柄として識別できる一方で、短絡・断線など致命的な異常が生じた場合には、連続的に当該図柄が表示されることとなるため、異常原因の特定報知として利用できるのである。尚、本実施形態では、副遊技用識別情報の停止識別情報として、複数の特殊態様の内から一の態様を選択するよう構成されているが、これには限定されず、予め定めた一の態様を特殊態様とするよう構成してもよい。このように構成することで、副遊技制御部側におけるデータ容量の削減と非異常動作時のハズレ図柄生成処理に対する制約を緩和(例えば、図25のステップ5742のような判定処理を実行している場合には、当該判定処理に基づくループ処理の発生が軽減)することが可能となる。
According to the present embodiment, based on the information about the stop identification information of the main game identification information and the information about the change mode transmitted from the main game control unit, the result of the change mode of the main game identification information and the stop identification information Are determined to be consistent, and when it is determined that they are not consistent, as the stop identification information of the secondary game identification information, a plurality of secondary game identifiers different from both the specific mode and the non-specific mode A sub-game that is a combination and can be a sub-game identifier in a specific mode and a non-specific mode as any one of a plurality of predetermined sub-game identifiers as a first sub-game identifier and the remaining sub-game identifiers Since it is configured to execute a control to assign a special mode that is a combination with a special identifier, the sub game control unit detects that the information transmitted from the main game control unit is incorrect information. In the case, while minimizing the impact on the player, it is possible to promptly notifying that the detected. Furthermore, even if command reception abnormalities occur accidentally due to noise, etc., the player can identify them as mere losing patterns, but if a fatal abnormality such as a short circuit or disconnection occurs, the corresponding symbols are displayed continuously. Therefore, it can be used as a specific notification of the cause of the abnormality. In addition, in this embodiment, although it is comprised so that one aspect may be selected from several special aspects as stop identification information of identification information for subgames, it is not limited to this, One predetermined You may comprise so that an aspect may be made into a special aspect. By configuring in this way, restrictions on the data capacity reduction on the side of the secondary game control unit and the loss symbol generation process at the time of non-abnormal operation are relaxed (for example, a determination process such as
本実施形態によれば、可変部材を変位させるタイミングに到達した際、当該タイミングにて駆動状態にある駆動源の合計数に係る情報又は当該タイミングにて駆動状態にある駆動源に印加されている電力の合計値に係る情報を把握した上、当該把握結果に基づき、実測値又は推定値としての前記合計数が所定数に到達しているか又は実測値又は推定値としての前記合計値が所定値に到達していると判定した場合、今回新たに変位させることを予定していた可変部材の、当該タイミングでの変位を実行しない決定をし得る構成されているため、複数の駆動源が同時に駆動されることにより電気的容量を超過する電力が供給されることを効果的に回避することができる。尚、本実施形態では、サブメイン制御基板側に設けられた可動体役物に係る消費電力にのみ基づいて駆動の是非を決定していたが、サブサブ制御基板側での消費電力を加味して駆動の是非を決定するよう構成してもよい。また、主制御基板上で制御される発射装置や払出制御装置、大入賞口を駆動するソレノイド等の動作情報を適宜サブメイン制御基板に送信{或いは、当該動作情報を受信したサブメイン制御基板側にて主制御基板側の動作を予測(例えば、特別遊技開始情報を受信したサブメイン制御基板側では、当該情報に基づいて以降の大入賞口駆動パターンを予測)}し、当該情報をも加味して駆動の是非を決定するよう構成しても良い。このような場合、遊技進行に係る主遊技制御部の駆動源を最優先して駆動するよう構成することが好適であるが、特に、後述するスロットマシンにおいては、遊技中(主リール駆動中)における遊技進行に基づく主リールの駆動停止、遊技結果に基づく払出制御装置の駆動など、消費電力の変化が遊技進行に対応するためより効率的な演出実行が期待できる。 According to the present embodiment, when the timing for displacing the variable member is reached, the information related to the total number of driving sources in the driving state at the timing or the driving source in the driving state at the timing is applied. After grasping information related to the total value of power, based on the grasped result, the total number as the actual measurement value or the estimated value has reached the predetermined number, or the total value as the actual measurement value or the estimated value is the predetermined value. If it is determined that the variable member that has been scheduled to be newly displaced is determined not to be displaced at that timing, a plurality of drive sources are driven simultaneously. By doing so, it is possible to effectively avoid the supply of electric power exceeding the electric capacity. In this embodiment, the right or wrong driving is determined based only on the power consumption of the movable body accessory provided on the sub-main control board side, but the power consumption on the sub-sub control board side is taken into account. You may comprise so that the right or wrong of a drive may be determined. In addition, the operation information of the launching device, the payout control device controlled on the main control board, the solenoid for driving the winning prize opening, etc. is appropriately transmitted to the sub main control board {or the sub main control board side receiving the operation information The operation on the main control board side is predicted (for example, the sub-main control board side that has received the special game start information predicts the subsequent big winning opening driving pattern based on the information)}, and also considers the information Then, it may be configured to determine whether to drive. In such a case, it is preferable that the drive source of the main game control unit related to the game progress is driven with the highest priority. In particular, in a slot machine to be described later, the game is being played (main reel is being driven). Since the change in power consumption corresponds to the progress of the game, such as the driving stop of the main reel based on the game progress and the drive of the payout control device based on the game result, more efficient performance can be expected.
本実施形態によれば、可変部材駆動信号有効期間履歴情報一時記憶手段に一時記憶されている履歴情報に基づき、駆動源に対する駆動信号に係る入力期間の時間値をX、監視期間の時間値をYとして導出すると共に、時間値Yを基準とした時間値Xの割合が所定値以上又は超となった場合には、駆動源に対して出力される駆動信号を無効又は制限するよう構成されているため、特別な回路を別途設ける必要なくコイル部の焼損等による駆動源の故障発生を防止することができる。特に、個別の制御信号として出力をクランプする構成であるので、異常発生によるリトライ制御や駆動制御プログラム上の予期しないバグがあった場合であっても正常に機能することができ、ハードウエア上のマージン幅を最低限に抑えることによるコストダウンやスペースメリットを付与することが可能となる。 According to this embodiment, based on the history information temporarily stored in the variable member drive signal effective period history information temporary storage means, the time value of the input period related to the drive signal for the drive source is X, and the time value of the monitoring period is In addition to being derived as Y, when the ratio of the time value X with respect to the time value Y becomes equal to or greater than a predetermined value, the drive signal output to the drive source is invalidated or limited. Therefore, it is possible to prevent the drive source from being damaged due to burning of the coil portion or the like without requiring a special circuit. In particular, because the output is clamped as an individual control signal, it can function normally even if there is an unexpected bug in the retry control or drive control program due to the occurrence of an abnormality. Cost reduction and space merit can be provided by minimizing the margin width.
尚、本実施形態では、ぱちんこ遊技機に可動体役物を設置した場合について例示しているが、スロットマシンに可動体役物を設置している場合においても本発明を適用することが可能である。ここで、周知のスロットマシンについて補足説明しておく。 In this embodiment, the case where the movable body accessory is installed in the pachinko gaming machine is illustrated, but the present invention can be applied even when the movable body accessory is installed in the slot machine. is there. Here, a supplementary description of a known slot machine will be given.
まず、周知のスロットマシンには、遊技の進行を司る主遊技制御部としてのメイン基板と、演出の実行を司る副遊技制御部としてのサブ基板と、主遊技用識別情報を表示するための主遊技用識別情報表示部として複数の識別情報が夫々外周上に配置された複数列(一般には3列)のリールと、遊技者によって操作可能であって遊技開始を指示する主遊技開始指示装置としてのスタートレバーと、遊技者によって操作可能であって遊技進行を指示する主遊技進行指示装置としてのストップボタンと、を有している。そして、メイン基板には、スタートレバーが操作されたことを契機として主遊技用乱数を取得する主遊技用乱数取得手段と、主遊技用乱数取得手段が取得した乱数に基づき一又は複数の停止識別情報を暫定的に決定する主遊技用識別情報表示内容決定手段(例えば、小役や特別役物等の当選役を内部的に決定する表示内容決定手段)と、主遊技用識別情報表示内容決定手段により暫定的に決定された一又は複数の停止識別情報とストップボタンの操作タイミングとに基づき、一の停止識別情報を主遊技用識別情報表示部であるリール上に確定表示するよう制御する主遊技用識別情報表示制御手段(例えば、内部的に決定された当選役とストップボタンが押圧されたタイミングとに基づき、所定の位置でリールを停止するリール制御手段)と、主遊技用識別情報表示部であるリール上にて停止識別情報として所定態様が表示された場合、特別遊技に移行させるよう制御する特別遊技実行制御手段(例えば、「777等」が所定の有効ライン上に並んだことを契機として、特別役物を作動させる特別役物作動手段)と、主遊技用乱数取得手段が取得した主遊技用乱数に関する情報を副遊技制御部側に送信する主遊技側情報送信制御手段と、を有している。 First, in a well-known slot machine, a main board as a main game control section that controls the progress of a game, a sub board as a sub game control section that controls the execution of effects, and a main board for displaying identification information for main games. As a game identification information display section, a plurality of rows (generally three rows) of reels each having a plurality of pieces of identification information arranged on the outer periphery, and a main game start instruction device that can be operated by the player and instruct the game start And a stop button as a main game progress instructing device that can be operated by the player and instructs the progress of the game. The main board has a main game random number acquisition unit for acquiring a main game random number when the start lever is operated, and one or more stop identifications based on the random number acquired by the main game random number acquisition unit. Main game identification information display content determination means for tentatively determining information (for example, display content determination means for internally determining a winning combination such as a small role or a special character), and determination of the main game identification information display content Based on one or a plurality of stop identification information tentatively determined by the means and the operation timing of the stop button, the main stop control information is controlled so as to be fixedly displayed on the reel which is the main game identification information display unit. Game identification information display control means (for example, a reel control means for stopping the reel at a predetermined position based on the internally determined winning combination and the timing when the stop button is pressed); When a predetermined mode is displayed as stop identification information on a reel serving as a game identification information display unit, special game execution control means (for example, “777 etc.”) that controls to shift to a special game is on a predetermined active line The main game side information for transmitting the information related to the main game random number acquired by the main game random number acquisition means to the sub game control unit side. Transmission control means.
このような周知構成のスロットマシンにおける副遊技制御部側について、本実施形態の可動体役物に係る構成を適用することができるのである。ここで、ぱちんこ遊技機に可動体役物を設置した場合には、当該可動体役物は図柄変動の変動態様に基づき動作することとなる。他方、スロットマシンに可動体役物を設置(例えば、リール表示面への視認を妨げない位置に可動体役物を配置)している場合には、主遊技制御基板側での内部抽選結果{例えば、当選役や遊技状態(例えば、再遊技確率変動遊技状態)}や副遊技制御基板側での内部抽選結果{例えば、押し順や当選小役報知などのアシスト遊技(所謂AT遊技)に係る遊技状態}、或いはリール上での抽選結果表示内容(例えば、有効ライン上での図柄並び)に基づき動作することとなる。また、スロットマシンにおけるエラーとしては、遊技媒体(メダル)の払出異常やセレクター異常、設定変更時(設定変更モードへの移行時・移行中)等があるが、遊技進行を中断するエラーであることが多い。このような可動体役物の動作制御方法の相違点はあるものの、スロットマシンに可動体役物を設置している場合において、本発明を適用することを阻害するものではないことを補足しておく。尚、遊技進行を中断するエラーが比較的発生し易いスロットマシンにおいては、当該遊技進行を中断するエラー発生時において可動体役物のエラー解消動作を行うよう構成しておくことが望ましく、また、可動体役物に係るエラー報知期間は、当該遊技進行を中断するエラー解除後の所定期間に亘って継続して報知されるよう設定しておくことが望ましい。 The configuration relating to the movable body accessory of the present embodiment can be applied to the sub game control unit side in the slot machine having such a known configuration. Here, when a movable body accessory is installed in a pachinko gaming machine, the movable body accessory operates based on a variation aspect of symbol variation. On the other hand, when the movable body accessory is installed in the slot machine (for example, the movable body accessory is arranged at a position that does not hinder the visual recognition on the reel display surface), the internal lottery result on the main game control board side { For example, winning combination and gaming state (for example, re-playing probability variation gaming state)} or internal lottery result on the secondary game control board side {for example, assist games (so-called AT games) such as push order and winning small role notification Game state}, or the lottery result display contents on the reel (for example, the arrangement of symbols on the active line). In addition, errors in slot machines include game media (medal) payout abnormality, selector abnormality, setting change (during transition to / in transition to setting change mode), etc., but errors that interrupt the progress of the game. There are many. Although there is a difference in the operation control method of the movable body accessory, it is supplemented that the present invention is not hindered when the movable body accessory is installed in the slot machine. deep. It should be noted that in a slot machine where an error that interrupts the game progress is relatively likely to occur, it is desirable to perform an error-resolving operation of the movable object when an error occurs that interrupts the game progress. It is desirable that the error notification period related to the movable body accessory is set so as to be continuously notified over a predetermined period after the error is released to interrupt the progress of the game.
1000 主制御装置、1100 遊技制御手段
1110 入球判定手段、1111 第1主遊技始動口入球判定手段
1112 第2主遊技始動口入球判定手段、1113 補助遊技入球口入球判定手段
1120 乱数取得判定実行手段、1121 第1主遊技乱数取得判定実行手段
1122 第2主遊技乱数取得判定実行手段、1123 補助遊技乱数取得判定実行手段
1130 保留制御手段、1131 第1主遊技図柄保留手段
1131a 第1主遊技図柄保留情報一時記憶手段、1132 第2主遊技図柄保留手段
1132a 第2主遊技図柄保留情報一時記憶手段、1133 補助遊技図柄保留手段
1133a 補助遊技図柄保留情報一時記憶手段、1135 当否抽選手段
1135a 特別遊技移行決定手段、1135b 当否抽選用テーブル
1135b−1 第1主遊技用当否抽選テーブル、1135b−3 第2主遊技用当否抽選テーブル
1140 図柄内容決定手段、1141 第1主遊技内容決定手段
1141a 第1主遊技内容決定用抽選テーブル、1142 第2主遊技内容決定手段
1142a 第2主遊技内容決定用抽選テーブル、1143 補助遊技内容決定手段
1143a 補助遊技内容決定用抽選テーブル、1150 表示制御手段
1151 第1主遊技図柄制御手段、1151a 第1主遊技図柄変動時間管理手段
1151a−1 第1主遊技図柄変動管理用タイマ、1152 第2主遊技図柄制御手段
1152a 第2主遊技図柄変動時間管理手段、1152a−1 第2主遊技図柄変動管理用タイマ
1154 主遊技図柄保留解除制御手段、1153 補助遊技図柄制御手段
1153a 補助遊技図柄変動時間管理手段、1153a−1 補助遊技図柄変動管理用タイマ
1160 電動役物開閉制御手段、1161 条件判定手段
1162 開放タイマ、1170 特別遊技制御手段
1171 条件判定手段、1172 特別遊技内容決定手段
1172a 特別遊技内容参照テーブル、1173 特別遊技実行手段
1174 特別遊技時間管理手段、1174a 特別遊技用タイマ
1180 特定遊技制御手段、1181 特定遊技終了条件判定手段
1181a 時短回数カウンタ、1190 遊技状態一時記憶手段
1191 第1主遊技状態一時記憶手段、1191a 第1フラグ一時記憶手段
1191b 第1主遊技図柄情報一時記憶手段、1192 第2主遊技状態一時記憶手段
1192a 第2フラグ一時記憶手段、1192b 第2主遊技図柄情報一時記憶手段
1193 補助遊技状態一時記憶手段、1193a 補助遊技関連情報一時記憶手段
1193b 補助遊技図柄情報一時記憶手段、1194 特別遊技関連情報一時記憶手段
1300 情報送信制御手段、1400 賞球払出決定手段
1600 振動エラー検出制御手段、1610 振動エラー検出時入力無効化手段
1611 入力無効化状態保持期間タイマ、2000 遊技周辺機器
2210 第1主遊技始動口、2211 第1入球検出装置
2130 第1主遊技図柄表示装置、2131 第1主遊技図柄表示部
2132 第1主遊技図柄保留表示部、2110 第2主遊技始動口
2111 第2入球検出装置、2112 電動役物
2230 第2主遊技図柄表示装置、2231 第2主遊技図柄表示部
2232 第2主遊技図柄保留表示部、2120 第1大入賞口
2121 第1入賞検出装置、2122 第1電動役物
2220 第2大入賞口、2221 第2入賞検出装置
2222 第2電動役物、2410 補助遊技入球口
2411 入球検出装置、2420 補助遊技図柄表示装置
2421 補助遊技図柄表示部、2422 補助遊技図柄保留表示部
2320 演出表示制御手段(サブメイン制御基板)、2321 表示情報受信手段
2321a メイン側情報一時記憶手段、2322 装飾図柄表示制御手段
2322a 装図表示内容決定手段、2322a−1 装図変動内容決定用抽選テーブル
2322b 装図変動態様・図柄記憶手段、2322c 装図表示関連情報一時記憶手段
2322d 装図特殊停止図柄内容決定手段、2322d−1 特殊停止図柄内容決定用参照テーブル
2323 装図保留情報表示制御手段、2323a装図保留情報一時記憶手段
2323a−1 装図保留カウンタ、2324 演出一般情報一時記憶手段
2325 可動体役物制御手段、2325a 可動体役物初期動作実行制御手段
2325a−1 初期動作可否・内容決定手段、2325a−1−1 初期動作内容決定用参照テーブル
2325a−2 初期動作開始制御手段、2325a−3 初期動作終了制御手段
2325b 可動体役物エラー解消動作実行制御手段、2325b−1 エラー解消動作可否・内容決定手段
2325b−1−1 エラー解消動作内容決定用参照テーブル、2325b−2 エラー解消動作開始制御手段
2325b−3 エラー解消動作終了制御手段、2325c 可動体役物演出動作実行制御手段
2325c−1 演出動作可否・内容決定手段、2325c−1−1 演出動作内容決定用参照テーブル
2325c−2 演出動作開始制御手段、2325c−3 演出動作終了制御手段
2325d 可動体役物動作状態情報一時記憶手段、2325e 可動体役物異常動作監視制御手段
2325e−1 可動体役物基本位置決定手段、2325e−1−1 基本位置決定用参照テーブル
2325e−2 可動体役物位置整合性確認手段、2325e−2−1 位置整合性確認内容決定用参照テーブル
2325e−4 可動体役物エラー報知制御手段、2325e−4−1 可動体役物毎動作異常累積カウンタ
2325f 可動体役物駆動源励磁制御手段、2325f−1 駆動源励磁開始制御手段
2325f−2 駆動源励磁終了制御手段、2325g 可動体役物過通電回避制御手段
2325g−1 駆動源数上限リミッタ制御手段、2325g−2 駆動源毎通電時間監視タイマ
2325g−3 駆動源毎励磁履歴情報累積一時記憶手段、2325h 可動体役物特殊可動実行制御手段
2325h−1 特殊可動準備動作実行制御手段、2325h−2 特殊可動実行制御手段
2326 電源立ち上げ時処理制御手段、2327 サブ側遊技状態制御手段
2310 演出表示手段(サブサブ制御基板)、2311 装飾図柄表示領域
2312a 第1保留表示部、2312b 第2保留表示部
3000 賞球払出制御装置
1000 Main control device, 1100 Game control means 1110 Entrance determination means, 1111 First main game start entrance entrance judgment means 1112 Second main game start entrance entrance judgment means, 1113 Auxiliary game entrance entrance entrance judgment means 1120 Random number Acquisition determination execution means, 1121 First main game random number acquisition determination execution means 1122 Second main game random number acquisition determination execution means, 1123 Auxiliary game random number acquisition determination execution means 1130 Hold control means, 1131 First main game symbol hold means 1131a First Main game symbol hold information temporary storage means, 1132 Second main game symbol hold means 1132a Second main game symbol hold information temporary storage means, 1133 Auxiliary game symbol hold means 1133a Auxiliary game symbol hold information temporary storage means, 1135 Winning lottery means 1135a Special game transition determining means, 1135b winning / no-win lottery table 1135b- First main game success / failure lottery table, 1135b-3 Second main game success / failure lottery table 1140 Symbol content determination means, 1141 First main game content determination means 1141a First main game content determination lottery table, 1142 Second main game Content determination means 1142a Second main game content determination lottery table, 1143 Auxiliary game content determination means 1143a Auxiliary game content determination lottery table, 1150 Display control means 1151 First main game symbol control means, 1151a First main game symbol variation time Management means 1151a-1 First main game symbol variation management timer, 1152 Second main game symbol control means 1152a Second main game symbol variation time management means, 1152a-1 Second main game symbol variation management timer 1154 Main game symbol Hold release control means, 1153 Auxiliary game symbol control means 1153a Auxiliary game Pattern change time management means, 1153a-1 Auxiliary game symbol change management timer 1160 Electric accessory opening / closing control means, 1161 Condition determination means 1162 Open timer, 1170 Special game control means 1171 Condition determination means, 1172 Special game content determination means 1172a Special Game content reference table, 1173 Special game execution means 1174 Special game time management means, 1174a Special game timer 1180 Specific game control means, 1181 Specific game end condition determination means 1181a Time-count counter, 1190 Game state temporary storage means 1191 First main Game state temporary storage means, 1191a First flag temporary storage means 1191b First main game symbol information temporary storage means, 1192 Second main game state temporary storage means 1192a Second flag temporary storage means, 1192b Second main game symbol information temporary storage hand Step 1193 Auxiliary game state temporary storage means, 1193a Auxiliary game related information temporary storage means 1193b Auxiliary game symbol information temporary storage means, 1194 Special game related information temporary storage means 1300 Information transmission control means, 1400 Prize ball payout determination means 1600 Vibration error detection Control means, 1610 input invalidation means 1611 when detecting vibration error, input invalidation state holding period timer, 2000 gaming peripheral equipment 2210 first main game starting port, 2211 first entrance detection device 2130 first main game symbol display device, 2131 First main game symbol display unit 2132 First main game symbol hold display unit, 2110 Second main game start port 2111 Second entrance detection device, 2112 Electric accessory 2230 Second main game symbol display device, 2231 Second main game Symbol display part 2232 2nd main game symbol hold display part, 2120 1st grand prize opening 2121 1st winning detection device, 2122 1st electric winning combination 2220 2nd big winning opening, 2221 2nd winning detection device 2222 2nd electric winning combination, 2410 auxiliary game entrance 2411 entrance detection device, 2420 auxiliary game symbol display Device 2421 Auxiliary game symbol display unit, 2422 Auxiliary game symbol hold display unit 2320 Production display control means (sub-main control board), 2321 Display information reception unit 2321a Main side information temporary storage unit, 2322 Decoration symbol display control unit 2322a Content determination means, 2322a-1 Drawing variation content determination lottery table 2322b Drawing variation mode / design storage means, 2322c Drawing display related information temporary storage means 2322d Drawing special stop symbol content determination means, 2322d-1 Special stop symbol Content determination reference table 2323 Drawing hold information display control means 2323a Drawing hold information temporary storage means 2323a-1 Drawing hold counter, 2324 Production general information temporary storage means 2325 Movable body accessory control means, 2325a Movable object initial action execution control means 2325a-1 Initial motion availability / content determination Means, 2325a-1-1 initial operation content determination reference table 2325a-2 initial operation start control means, 2325a-3 initial operation end control means 2325b movable object error elimination operation execution control means, 2325b-1 error elimination operation availability Content determination means 2325b-1-1 Error resolution operation content determination reference table, 2325b-2 Error resolution operation start control means 2325b-3 Error resolution operation end control means, 2325c Movable object effect operation execution control means 2325c-1 Production operation availability / content determination means, 2325c-1 1 Production operation content determination reference table 2325c-2 Production operation start control means, 2325c-3 Production operation end control means 2325d Movable object action state information temporary storage means, 2325e Movable object abnormality operation monitoring control means 2325e-1 Movable object accessory basic position determination means, 2325e-1-1 Basic position determination reference table 2325e-2 Movable object accessory position consistency confirmation means, 2325e-2-1 Position consistency confirmation content determination reference table 2325e-4 Movable object accessory error notification control means, 2325e-4-1 Permanent movement abnormality accumulation counter 2325f Movable object drive source excitation control means, 2325f-1 Drive source excitation start control means 2325f-2 End of drive source excitation Control means, 2325g Movable object overcurrent avoidance control means 2325g-1 Drive source number upper limiter control Means, 2325g-2 energization time monitoring timer for each drive source 2325g-3, excitation history information accumulation temporary storage means for each drive source, 2325h movable body special movement execution control means 2325h-1 special movement preparation operation execution control means, 2325h-2 Special movable execution control means 2326 Power-on start processing control means, 2327 Sub-side gaming state control means 2310 Effect display means (sub-sub control board), 2311 Decoration symbol display area 2312a First hold display section, 2312b Second hold display section 3000 Prize ball payout control device
本態様(1)に係る遊技機は、
遊技の進行を司る主遊技制御部(例えば、主制御装置1000)と演出の実行を司る副遊技制御部(例えば、演出表示制御手段2320)とを備えるぱちんこ遊技機であって、
遊技球が入球可能な主遊技用始動口(例えば、第1主遊技始動口2210、第2主遊技始動口2110)と、
主遊技用識別情報(例えば、主遊技図柄)の変動表示及び停止表示が実行される主遊技用識別情報表示部(例えば、第1主遊技図柄表示部2131、第2主遊技図柄表示部2231)と、
開状態と閉状態とを採り得る可変入賞口(例えば、第1大入賞口2120、第2大入賞口2220)と、
副遊技用識別情報(例えば、装飾図柄)の変動表示及び停止表示が実行される副遊技用識別情報表示部(例えば、装飾図柄表示領域2311)と、
変位可能な可変部材(例えば、可動体役物群232−110、可動体役物群232−210)と
を更に備えており、
主遊技制御部(例えば、主制御装置1000)は、
主遊技用始動口(例えば、第1主遊技始動口2210、第2主遊技始動口2110)への遊技球の入球を契機として、主遊技用乱数を取得する主遊技用乱数取得手段(例えば、第1主遊技乱数取得判定実行手段1121、第2主遊技乱数取得判定実行手段1122)と、
主遊技用乱数取得手段(例えば、第1主遊技乱数取得判定実行手段1121、第2主遊技乱数取得判定実行手段1122)が取得した乱数に基づき、主遊技用識別情報表示部(例えば、第1主遊技図柄表示部2131、第2主遊技図柄表示部2231)で表示される主遊技用識別情報(例えば、主遊技図柄)の変動態様及び停止識別情報を決定する主遊技用識別情報表示内容決定手段(例えば、第1主遊技内容決定手段1141、第2主遊技内容決定手段1142)と、
主遊技用識別情報表示内容決定手段(例えば、第1主遊技内容決定手段1141、第2主遊技内容決定手段1142)により決定された変動態様に従い、主遊技用識別情報表示部(例えば、第1主遊技図柄表示部2131、第2主遊技図柄表示部2231)にて主遊技用識別情報(例えば、主遊技図柄)を変動表示した後、主遊技用識別情報表示内容決定手段(例えば、第1主遊技内容決定手段1141、第2主遊技内容決定手段1142)により決定された停止識別情報を表示するよう制御する主遊技用識別情報表示制御手段(例えば、第1主遊技図柄制御手段1151、第2主遊技図柄制御手段1152)と、
主遊技用識別情報表示部(例えば、第1主遊技図柄表示部2131、第2主遊技図柄表示部2231)にて停止識別情報として所定態様が表示された場合、可変入賞口(例えば、第1大入賞口2120、第2大入賞口2220)を閉状態から開状態とする特別遊技に移行させるよう制御する特別遊技実行制御手段(例えば、特別遊技制御手段1170)と、
主遊技用乱数取得手段(例えば、第1主遊技乱数取得判定実行手段1121、第2主遊技乱数取得判定実行手段1122)が取得した主遊技用乱数に関する情報を副遊技制御部(例えば、演出表示制御手段2320)側に送信する主遊技側情報送信制御手段(例えば、情報送信制御手段1300)と
を備えており、
副遊技制御部(例えば、演出表示制御手段2320)は、
主遊技制御部(例えば、主制御装置1000)から送信された主遊技用乱数に関する情報に基づき、副遊技用識別情報表示部(例えば、装飾図柄表示領域2311)で表示される副遊技用識別情報(例えば、装飾図柄)の変動態様及び停止識別情報を決定する副遊技用識別情報表示内容決定手段(例えば、装図表示内容決定手段2322a)と、
主遊技制御部(例えば、主制御装置1000)側での主遊技用識別情報(例えば、主遊技図柄)の変動及び停止と同期させる形で、副遊技用識別情報表示内容決定手段(例えば、装図表示内容決定手段2322a)により決定された変動態様に基づき、副遊技用識別情報表示部(例えば、装飾図柄表示領域2311)にて副遊技用識別情報(例えば、装飾図柄)を変動表示した後、副遊技用識別情報表示内容決定手段(例えば、装図表示内容決定手段2322a)により決定された停止識別情報を確定的に表示するよう制御する副遊技用識別情報表示制御手段(例えば、装飾図柄表示制御手段2322)と、
副遊技用識別情報(例えば、装飾図柄)の変動表示期間中に可変部材(例えば、可動体役物群232−110、可動体役物群232−210)を変位させる場合、主遊技制御部(例えば、主制御装置1000)から送信された主遊技用乱数に関する情報に基づき、可変部材(例えば、可動体役物群232−110、可動体役物群232−210)の変位態様を決定する可変部材変位内容決定手段(例えば、演出動作可否・内容決定手段2325c―1)と、
可変部材変位内容決定手段(例えば、演出動作可否・内容決定手段2325c―1)により決定された変位態様に基づき、副遊技用識別情報(例えば、装飾図柄)の変動表示期間中に可変部材(例えば、可動体役物群232−110、可動体役物群232−210)を変位させる制御を実行可能な可変部材変位制御手段(例えば、可動体役物制御手段2325)と
を備えるぱちんこ遊技機であって、
主遊技制御部(例えば、主制御装置1000)は、
主遊技制御部(例えば、主制御装置1000)側における遊技の進行に係るエラーを検出する主遊技側エラー検出手段(振動エラー検出制御手段1600)と、
主遊技側エラー検出手段(振動エラー検出制御手段1600)により遊技の進行に係るエラーが検出された際には、当該エラーが検出された旨の情報を副遊技制御部(例えば、演出表示制御手段2320)側に送信する主遊技側エラー情報送信手段(情報送信制御手段1300)と
を備えており、
副遊技制御部(例えば、演出表示制御手段2320)は、
主遊技側エラー情報送信手段(情報送信制御手段1300)からエラーが検出された旨の情報を受信した場合には、少なくとも一の可変部材(例えば、可動体役物群232−110、可動体役物群232−210)についてはエラー報知対象可変部材とし、可変部材変位内容決定手段(例えば、演出動作可否・内容決定手段2325c―1)が決定した変位態様に基づいて変位動作が実行されていたとしてもエラー報知対象可変部材の当該変位動作を中止し、可変部材変位内容決定手段(例えば、演出動作可否・内容決定手段2325c―1)が副遊技用識別情報(例えば、装飾図柄)の変動表示時に決定し得る変位態様とは異なる特定変位態様でエラー報知対象可変部材を変位させる制御を実行可能な可変部材強制変位制御手段(可動体役物特殊可動実行制御手段2325h)
を備えると共に、
エラー報知対象可変部材は、副遊技用識別情報表示部の一部又は全てを遮蔽する遮蔽位置に移動可能であり、前記特定変位態様では前記遮蔽位置に移動する
ことを特徴とする
ぱちんこ遊技機である。
The gaming machine according to this aspect (1)
A pachinko gaming machine comprising a main game control unit (for example, the main control device 1000) that controls the progress of a game and a sub game control unit (for example, an effect display control means 2320) that controls the execution of an effect,
A main game start port (for example, a first main
Main game identification information display unit (for example, first main game
A variable winning opening (for example, a first
A secondary game identification information display unit (for example, a decorative symbol display area 2311) in which variable display and stop display of the secondary game identification information (for example, a decorative symbol) is executed;
A movable member that can be displaced (for example, movable body accessory group 232-110, movable body accessory group 232-210),
The main game control unit (for example, the main control device 1000)
Main game random number acquisition means (for example, main game random number acquisition means) (for example, main game random number acquisition means) when a game ball enters the main game start port (for example, the first main
Based on the random numbers acquired by the main game random number acquisition means (for example, the first main game random number acquisition determination execution means 1121 and the second main game random number acquisition determination execution means 1122), the main game identification information display unit (for example, the first game random number acquisition determination execution means 1122). Main game identification information display content determination for determining a variation mode and stop identification information of main game identification information (for example, main game symbol) displayed on the main game
In accordance with the variation mode determined by the main game identification information display content determination means (for example, the first main game content determination means 1141 and the second main game content determination means 1142), After the main game identification information (for example, the main game symbol) is variably displayed on the main game
When a predetermined mode is displayed as stop identification information in the main game identification information display unit (for example, the first main game
Information related to the main game random number acquired by the main game random number acquisition means (for example, the first main game random number acquisition determination execution means 1121 and the second main game random number acquisition determination execution means 1122) is displayed in the sub game control unit (for example, effect display). Main game side information transmission control means (for example, information transmission control means 1300) for transmission to the control means 2320) side,
The secondary game control unit (for example, the effect display control means 2320)
The secondary game identification information displayed in the secondary game identification information display unit (for example, the decorative symbol display area 2311) based on the information related to the main game random number transmitted from the main game control unit (for example, the main control device 1000). Sub-game identification information display content determination means (for example, a drawing display content determination means 2322a) for determining a variation mode and stop identification information (for example, a decorative symbol);
Sub-game identification information display content determination means (for example, a device) is synchronized with the fluctuation and stop of the main game identification information (for example, the main game symbol) on the main game control unit (for example, the main control device 1000) side. After the secondary game identification information (for example, a decorative symbol) is variably displayed on the secondary game identification information display unit (for example, the decorative symbol display area 2311) based on the variation mode determined by the figure display content determining means 2322a). The secondary game identification information display content determining means (for example, the display display content determining means 2322a), the secondary game identification information display control means (for example, a decorative symbol) for controlling to display the stop identification information deterministically. Display control means 2322);
When displacing variable members (for example, the movable body accessory group 232-110 and the movable body accessory group 232-210) during the variable display period of the secondary game identification information (for example, decorative symbols), the main game control unit ( For example, based on the information relating to the main game random number transmitted from the main control device 1000), a variable for determining the displacement mode of the variable member (for example, the movable body accessory group 232-110, the movable body accessory group 232-210). Member displacement content determination means (for example, performance operation availability / content determination means 2325c-1);
Based on the displacement mode determined by the variable member displacement content determination means (for example, the performance operation availability / content determination means 2325c-1), the variable member (for example, the decorative symbol) is displayed during the variable display period of the secondary game identification information (for example, decoration symbol) And a variable member displacement control means (for example, a movable body accessory control means 2325) capable of executing control to displace the movable body accessory group 232-110 and movable body accessory group 232-210). There,
The main game control unit (for example, the main control device 1000)
Main game side error detection means (vibration error detection control means 1600) for detecting an error relating to the progress of the game on the main game control unit (for example, main control device 1000) side;
When an error relating to the progress of the game is detected by the main game side error detection means (vibration error detection control means 1600), information indicating that the error has been detected is sent to the sub game control unit (for example, effect display control means). 2320) main game side error information transmission means (information transmission control means 1300) for transmission to the side,
The secondary game control unit (for example, the effect display control means 2320)
When information indicating that an error has been detected is received from the main game side error information transmission means (information transmission control means 1300), at least one variable member (for example, the movable object combination group 232-110, the movable object combination) The object group 232-210) is a variable member subject to error notification, and the displacement operation has been executed based on the displacement mode determined by the variable member displacement content determination means (for example, the rendering operation availability / content determination means 2325c-1). However, the displacement operation of the variable member subject to error notification is stopped, and the variable member displacement content determination means (for example, the performance operation availability / content determination means 2325c-1) displays the variable display of the sub-game identification information (for example, decoration symbol). Variable member forced displacement control means (movable body role) capable of executing control for displacing the error notification target variable member in a specific displacement mode different from a displacement mode that can be determined sometimes Special movable execution controller 2325H)
Provided with a,
The error notification target variable member can be moved to a shielding position that shields part or all of the sub-game identification information display unit, and moves to the shielding position in the specific displacement mode.
This is a pachinko game machine.
本態様(2)に係る遊技機は、
ぱちんこ遊技機は、
可変部材(例えば、可動体役物群232−110、可動体役物群232−210)を複数備えており、
副遊技制御部(例えば、演出表示制御手段2320)は、
エラー報知対象可変部材以外の可変部材であるエラー報知対象外可変部材に関しては、エラー報知対象可変部材が前記特定変位態様で変位動作を実行している状況下では、エラー報知対象外可変部材が可変部材変位内容決定手段により決定された変位態様に基づく変位動作を実行している場合には当該変位動作を中止し、エラー報知対象外可変部材が可変部材変位内容決定手段により決定された変位態様に基づく変位動作を実行していない場合には主遊技側エラー情報送信手段からエラーが解除された旨の情報を受信するまで可変部材変位内容決定手段が副遊技用識別情報の変動表示時に決定し得る変位態様に基づく変位動作の実行を禁止する、本態様(1)のぱちんこ遊技機である。
The gaming machine according to this aspect (2)
Pachinko machines
A plurality of variable members (for example, movable body accessory group 232-110, movable body accessory group 232-210),
The secondary game control unit (for example, the effect display control means 2320)
For the error notification excluded variable member is variable member other than error notification target variable member, in a situation where the error notification target variable member is performing the displacement operation in the specific displacement embodiment, an error notification exempt variable member variable When the displacement operation based on the displacement mode determined by the member displacement content determination unit is being executed, the displacement operation is stopped, and the error notification target variable member is changed to the displacement mode determined by the variable member displacement content determination unit. If the displacement operation based on the variable information is not executed, the variable member displacement content determination means can determine the change information of the sub-game identification information until the information indicating that the error has been canceled is received from the main game side error information transmission means. This is a pachinko gaming machine of this mode (1) that prohibits execution of a displacement operation based on the displacement mode .
本態様(1)に係る遊技機は、
遊技の進行を司る主遊技制御部(例えば、主制御装置1000)と演出の実行を司る副遊技制御部(例えば、演出表示制御手段2320)とを備えるぱちんこ遊技機であって、
遊技球が入球可能な主遊技用始動口(例えば、第1主遊技始動口2210、第2主遊技始動口2110)と、
主遊技用識別情報(例えば、主遊技図柄)の変動表示及び停止表示が実行される主遊技用識別情報表示部(例えば、第1主遊技図柄表示部2131、第2主遊技図柄表示部2231)と、
開状態と閉状態とを採り得る可変入賞口(例えば、第1大入賞口2120、第2大入賞口2220)と、
副遊技用識別情報(例えば、装飾図柄)の変動表示及び停止表示が実行される副遊技用識別情報表示部(例えば、装飾図柄表示領域2311)と、
変位可能な可変部材(例えば、可動体役物群232−110、可動体役物群232−210)と
を更に備えており、
主遊技制御部(例えば、主制御装置1000)は、
主遊技用始動口(例えば、第1主遊技始動口2210、第2主遊技始動口2110)への遊技球の入球を契機として、主遊技用乱数を取得する主遊技用乱数取得手段(例えば、第1主遊技乱数取得判定実行手段1121、第2主遊技乱数取得判定実行手段1122)と、
主遊技用乱数取得手段(例えば、第1主遊技乱数取得判定実行手段1121、第2主遊技乱数取得判定実行手段1122)が取得した乱数に基づき、主遊技用識別情報表示部(例えば、第1主遊技図柄表示部2131、第2主遊技図柄表示部2231)で表示される主遊技用識別情報(例えば、主遊技図柄)の変動態様及び停止識別情報を決定する主遊技用識別情報表示内容決定手段(例えば、第1主遊技内容決定手段1141、第2主遊技内容決定手段1142)と、
主遊技用識別情報表示内容決定手段(例えば、第1主遊技内容決定手段1141、第2主遊技内容決定手段1142)により決定された変動態様に従い、主遊技用識別情報表示部(例えば、第1主遊技図柄表示部2131、第2主遊技図柄表示部2231)にて主遊技用識別情報(例えば、主遊技図柄)を変動表示した後、主遊技用識別情報表示内容決定手段(例えば、第1主遊技内容決定手段1141、第2主遊技内容決定手段1142)により決定された停止識別情報を表示するよう制御する主遊技用識別情報表示制御手段(例えば、第1主遊技図柄制御手段1151、第2主遊技図柄制御手段1152)と、
主遊技用識別情報表示部(例えば、第1主遊技図柄表示部2131、第2主遊技図柄表示部2231)にて停止識別情報として所定態様が表示された場合、可変入賞口(例えば、第1大入賞口2120、第2大入賞口2220)を閉状態から開状態とする特別遊技に移行させるよう制御する特別遊技実行制御手段(例えば、特別遊技制御手段1170)と、
主遊技用乱数取得手段(例えば、第1主遊技乱数取得判定実行手段1121、第2主遊技乱数取得判定実行手段1122)が取得した主遊技用乱数に関する情報を副遊技制御部(例えば、演出表示制御手段2320)側に送信する主遊技側情報送信制御手段(例えば、情報送信制御手段1300)と
を備えており、
副遊技制御部(例えば、演出表示制御手段2320)は、
主遊技制御部(例えば、主制御装置1000)から送信された主遊技用乱数に関する情報に基づき、副遊技用識別情報表示部(例えば、装飾図柄表示領域2311)で表示される副遊技用識別情報(例えば、装飾図柄)の変動態様及び停止識別情報を決定する副遊技用識別情報表示内容決定手段(例えば、装図表示内容決定手段2322a)と、
主遊技制御部(例えば、主制御装置1000)側での主遊技用識別情報(例えば、主遊技図柄)の変動及び停止と同期させる形で、副遊技用識別情報表示内容決定手段(例えば、装図表示内容決定手段2322a)により決定された変動態様に基づき、副遊技用識別情報表示部(例えば、装飾図柄表示領域2311)にて副遊技用識別情報(例えば、装飾図柄)を変動表示した後、副遊技用識別情報表示内容決定手段(例えば、装図表示内容決定手段2322a)により決定された停止識別情報を確定的に表示するよう制御する副遊技用識別情報表示制御手段(例えば、装飾図柄表示制御手段2322)と、
副遊技用識別情報(例えば、装飾図柄)の変動表示期間中に可変部材(例えば、可動体役物群232−110、可動体役物群232−210)を変位させる場合、主遊技制御部(例えば、主制御装置1000)から送信された主遊技用乱数に関する情報に基づき、可変部材(例えば、可動体役物群232−110、可動体役物群232−210)の変位態様を決定する可変部材変位内容決定手段(例えば、演出動作可否・内容決定手段2325c―1)と、
可変部材変位内容決定手段(例えば、演出動作可否・内容決定手段2325c―1)により決定された変位態様に基づき、副遊技用識別情報(例えば、装飾図柄)の変動表示期間中に可変部材(例えば、可動体役物群232−110、可動体役物群232−210)を変位させる制御を実行可能な可変部材変位制御手段(例えば、可動体役物制御手段2325)と
を備えるぱちんこ遊技機であって、
主遊技制御部(例えば、主制御装置1000)は、
主遊技制御部(例えば、主制御装置1000)側における遊技の進行に係るエラーを検出する主遊技側エラー検出手段(振動エラー検出制御手段1600)と、
主遊技側エラー検出手段(振動エラー検出制御手段1600)により遊技の進行に係るエラーが検出された際には、当該エラーが検出された旨の情報を副遊技制御部(例えば、演出表示制御手段2320)側に送信する主遊技側エラー情報送信手段(情報送信制御手段1300)と
を備えており、
副遊技制御部(例えば、演出表示制御手段2320)は、
副遊技用識別情報の変動表示期間中に主遊技側エラー情報送信手段(情報送信制御手段1300)からエラーが検出された旨の情報を受信した場合には、少なくとも一の可変部材(例えば、可動体役物群232−110、可動体役物群232−210)についてはエラー報知対象可変部材とし、可変部材変位内容決定手段(例えば、演出動作可否・内容決定手段2325c―1)が決定した変位態様に基づいて変位動作が実行されていたとしてもエラー報知対象可変部材の当該変位動作を中止し、可変部材変位内容決定手段(例えば、演出動作可否・内容決定手段2325c―1)が副遊技用識別情報(例えば、装飾図柄)の変動表示時に決定し得る変位態様とは異なる特定変位態様でエラー報知対象可変部材を変位させる制御を実行可能な可変部材強制変位制御手段(可動体役物特殊可動実行制御手段2325h)
を備えると共に、
エラー報知対象可変部材は、副遊技用識別情報表示部の一部又は全てを遮蔽する遮蔽位置に移動可能であり、前記特定変位態様では前記遮蔽位置に移動する
ことを特徴とする
ぱちんこ遊技機である。
The gaming machine according to this aspect (1)
A pachinko gaming machine comprising a main game control unit (for example, the main control device 1000) that controls the progress of a game and a sub game control unit (for example, an effect display control means 2320) that controls the execution of an effect,
A main game start port (for example, a first main
Main game identification information display unit (for example, first main game
A variable winning opening (for example, a first
A secondary game identification information display unit (for example, a decorative symbol display area 2311) in which variable display and stop display of the secondary game identification information (for example, a decorative symbol) is executed;
A movable member that can be displaced (for example, movable body accessory group 232-110, movable body accessory group 232-210),
The main game control unit (for example, the main control device 1000)
Main game random number acquisition means (for example, main game random number acquisition means) (for example, main game random number acquisition means) when a game ball enters the main game start port (for example, the first main
Based on the random numbers acquired by the main game random number acquisition means (for example, the first main game random number acquisition determination execution means 1121 and the second main game random number acquisition determination execution means 1122), the main game identification information display unit (for example, the first game random number acquisition determination execution means 1122). Main game identification information display content determination for determining a variation mode and stop identification information of main game identification information (for example, main game symbol) displayed on the main game
In accordance with the variation mode determined by the main game identification information display content determination means (for example, the first main game content determination means 1141 and the second main game content determination means 1142), After the main game identification information (for example, the main game symbol) is variably displayed on the main game
When a predetermined mode is displayed as stop identification information in the main game identification information display unit (for example, the first main game
Information related to the main game random number acquired by the main game random number acquisition means (for example, the first main game random number acquisition determination execution means 1121 and the second main game random number acquisition determination execution means 1122) is displayed in the sub game control unit (for example, effect display). Main game side information transmission control means (for example, information transmission control means 1300) for transmission to the control means 2320) side,
The secondary game control unit (for example, the effect display control means 2320)
The secondary game identification information displayed in the secondary game identification information display unit (for example, the decorative symbol display area 2311) based on the information related to the main game random number transmitted from the main game control unit (for example, the main control device 1000). Sub-game identification information display content determination means (for example, a drawing display content determination means 2322a) for determining a variation mode and stop identification information (for example, a decorative symbol);
Sub-game identification information display content determination means (for example, a device) is synchronized with the fluctuation and stop of the main game identification information (for example, the main game symbol) on the main game control unit (for example, the main control device 1000) side. After the secondary game identification information (for example, a decorative symbol) is variably displayed on the secondary game identification information display unit (for example, the decorative symbol display area 2311) based on the variation mode determined by the figure display content determining means 2322a). The secondary game identification information display content determining means (for example, the display display content determining means 2322a), the secondary game identification information display control means (for example, a decorative symbol) for controlling to display the stop identification information deterministically. Display control means 2322);
When displacing variable members (for example, the movable body accessory group 232-110 and the movable body accessory group 232-210) during the variable display period of the secondary game identification information (for example, decorative symbols), the main game control unit ( For example, based on the information relating to the main game random number transmitted from the main control device 1000), a variable for determining the displacement mode of the variable member (for example, the movable body accessory group 232-110, the movable body accessory group 232-210). Member displacement content determination means (for example, performance operation availability / content determination means 2325c-1);
Based on the displacement mode determined by the variable member displacement content determination means (for example, the performance operation availability / content determination means 2325c-1), the variable member (for example, the decorative symbol) is displayed during the variable display period of the secondary game identification information (for example, decorative symbols). And a variable member displacement control means (for example, a movable body accessory control means 2325) capable of executing control to displace the movable body accessory group 232-110 and movable body accessory group 232-210). There,
The main game control unit (for example, the main control device 1000)
Main game side error detection means (vibration error detection control means 1600) for detecting an error relating to the progress of the game on the main game control unit (for example, main control device 1000) side;
When an error relating to the progress of the game is detected by the main game side error detection means (vibration error detection control means 1600), information indicating that the error has been detected is sent to the sub game control unit (for example, effect display control means). 2320) main game side error information transmission means (information transmission control means 1300) for transmission to the side,
The secondary game control unit (for example, the effect display control means 2320)
When information indicating that an error has been detected is received from the main game side error information transmission means (information transmission control means 1300) during the variable display period of the secondary game identification information , at least one variable member (for example, movable For the body accessory group 232-110 and the movable body accessory group 232-210), the error notification target variable member is used, and the displacement determined by the variable member displacement content determination means (for example, the performance operation availability / content determination means 2325 c-1). Even if the displacement operation is executed based on the aspect, the displacement operation of the error notification target variable member is stopped, and the variable member displacement content determination means (for example, the performance operation availability / content determination means 2325c-1) is used for the secondary game. It is possible to execute control for displacing the error notification target variable member in a specific displacement manner different from the displacement manner that can be determined at the time of displaying the variation of the identification information (for example, decoration symbol) Varying member forced displacement control means (movable body won game special movable execution controller 2325H)
With
In the pachinko gaming machine, the error notification target variable member is movable to a shielding position that shields part or all of the sub-game identification information display unit, and moves to the shielding position in the specific displacement mode. is there.
Claims (3)
遊技球が入球可能な主遊技用始動口と、
主遊技用識別情報の変動表示及び停止表示が実行される主遊技用識別情報表示部と、
開状態と閉状態とを採り得る可変入賞口と、
副遊技用識別情報の変動表示及び停止表示が実行される副遊技用識別情報表示部と、
変位可能な可変部材と
を更に備えており、
主遊技制御部は、
主遊技用始動口への遊技球の入球を契機として、主遊技用乱数を取得する主遊技用乱数取得手段と、
主遊技用乱数取得手段が取得した乱数に基づき、主遊技用識別情報表示部で表示される主遊技用識別情報の変動態様及び停止識別情報を決定する主遊技用識別情報表示内容決定手段と、
主遊技用識別情報表示内容決定手段により決定された変動態様に従い、主遊技用識別情報表示部にて主遊技用識別情報を変動表示した後、主遊技用識別情報表示内容決定手段により決定された停止識別情報を表示するよう制御する主遊技用識別情報表示制御手段と、
主遊技用識別情報表示部にて停止識別情報として所定態様が表示された場合、可変入賞口を閉状態から開状態とする特別遊技に移行させるよう制御する特別遊技実行制御手段と、
主遊技用乱数取得手段が取得した主遊技用乱数に関する情報を副遊技制御部側に送信する主遊技側情報送信制御手段と
を備えており、
副遊技制御部は、
主遊技制御部から送信された主遊技用乱数に関する情報に基づき、副遊技用識別情報表示部で表示される副遊技用識別情報の変動態様及び停止識別情報を決定する副遊技用識別情報表示内容決定手段と、
主遊技制御部側での主遊技用識別情報の変動及び停止と同期させる形で、副遊技用識別情報表示内容決定手段により決定された変動態様に基づき、副遊技用識別情報表示部にて副遊技用識別情報を変動表示した後、副遊技用識別情報表示内容決定手段により決定された停止識別情報を確定的に表示するよう制御する副遊技用識別情報表示制御手段と、
副遊技用識別情報の変動表示期間中に可変部材を変位させる場合、主遊技制御部から送信された主遊技用乱数に関する情報に基づき、可変部材の変位態様を決定する可変部材変位内容決定手段と、
可変部材変位内容決定手段により決定された変位態様に基づき、副遊技用識別情報の変動表示期間中に可変部材を変位させる制御を実行可能な可変部材変位制御手段と
を備えるぱちんこ遊技機であって、
主遊技制御部は、
主遊技制御部側における遊技の進行に係るエラーを検出する主遊技側エラー検出手段と、
主遊技側エラー検出手段により遊技の進行に係るエラーが検出された際には、当該エラーが検出された旨の情報を副遊技制御部側に送信する主遊技側エラー情報送信手段と
を備えており、
副遊技制御部は、
主遊技側エラー情報送信手段からエラーが検出された旨の情報を受信した場合には、少なくとも一の可変部材についてはエラー報知対象可変部材とし、可変部材変位内容決定手段が決定した変位態様に基づいて変位動作が実行されていたとしてもエラー報知対象可変部材の当該変位動作を中止し、可変部材変位内容決定手段が副遊技用識別情報の変動表示時に決定し得る変位態様とは異なる特定変位態様でエラー報知対象可変部材を変位させる制御を実行可能な可変部材強制変位制御手段と
を備えるぱちんこ遊技機。 A pachinko gaming machine comprising a main game control unit that controls the progress of the game and a secondary game control unit that controls the execution of the production,
A main game start port where game balls can enter,
A main game identification information display unit in which a change display and a stop display of the main game identification information are executed;
A variable winning opening that can be open and closed;
A secondary game identification information display unit in which a change display and a stop display of the secondary game identification information are executed;
A variable member that can be displaced;
The main game control unit
The main game random number acquisition means for acquiring the main game random number triggered by the game ball entering the main game start port,
Based on the random number acquired by the main game random number acquisition means, the main game identification information display content determination means for determining the variation mode and stop identification information of the main game identification information displayed on the main game identification information display section;
In accordance with the variation mode determined by the main game identification information display content determination means, the main game identification information display section variably displays the main game identification information, and then is determined by the main game identification information display content determination means. Main game identification information display control means for controlling to display stop identification information;
Special game execution control means for controlling the variable prize opening to shift from the closed state to the special game when the predetermined mode is displayed as the stop identification information in the main game identification information display unit;
Main game side information transmission control means for transmitting information on the main game random number acquired by the main game random number acquisition means to the sub game control unit side,
The secondary game control unit
Sub-game identification information display content for determining a variation mode and stop identification information of the sub-game identification information displayed on the sub-game identification information display section based on information on the main game random number transmitted from the main game control section A determination means;
Based on the variation mode determined by the secondary game identification information display content determination means in a form synchronized with the variation and stop of the primary game identification information on the main game control unit side, the secondary game identification information display unit Sub-game identification information display control means for controlling to display definitely the stop identification information determined by the sub-game identification information display content determination means after variably displaying the game identification information;
Variable member displacement content determining means for determining the displacement mode of the variable member based on the information regarding the main game random number transmitted from the main game control unit when the variable member is displaced during the variable display period of the secondary game identification information; ,
A pachinko gaming machine comprising variable member displacement control means capable of executing control for displacing the variable member during the variable display period of the secondary game identification information based on the displacement mode determined by the variable member displacement content determination means. ,
The main game control unit
A main game side error detection means for detecting an error relating to the progress of the game on the main game control unit side;
A main game side error information transmission unit for transmitting information indicating that the error has been detected to the sub game control unit when an error relating to the progress of the game is detected by the main game side error detection unit; And
The secondary game control unit
When information indicating that an error has been detected is received from the main game side error information transmission means, at least one variable member is set as an error notification target variable member, based on the displacement mode determined by the variable member displacement content determination means. Even if the displacement operation has been executed, the displacement operation of the error notification target variable member is stopped, and the specific displacement mode different from the displacement mode that the variable member displacement content determination means can determine when displaying the variation information of the secondary game identification information A pachinko gaming machine comprising variable member forced displacement control means capable of executing control for displacing the error notification target variable member.
可変部材を複数備えており、
副遊技制御部は、
エラー報知対象可変部材以外の可変部材であるエラー報知対象外可変部材に関しては、エラー報知対象可変部材が前記特定変位態様で変位動作を実行している状況下では、エラー報知対象外可変部材が変位動作を実行している場合には当該変位動作を中止し、エラー報知対象外可変部材が変位動作を実行していない場合には以後の変位動作の実行を禁止する、請求項1記載のぱちんこ遊技機。 Pachinko machines
It has multiple variable members,
The secondary game control unit
With regard to a variable member other than the error notification target variable member that is a variable member other than the error notification target variable member, the error notification target variable member is displaced under a situation in which the error notification target variable member performs a displacement operation in the specific displacement mode. The pachinko game according to claim 1, wherein when the operation is being executed, the displacement operation is stopped, and when the error-not-applicable variable member is not executing the displacement operation, the subsequent displacement operation is prohibited. Machine.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010293974A JP2012139363A (en) | 2010-12-28 | 2010-12-28 | Pachinko game machine |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010293974A JP2012139363A (en) | 2010-12-28 | 2010-12-28 | Pachinko game machine |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2012139363A true JP2012139363A (en) | 2012-07-26 |
Family
ID=46676273
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010293974A Pending JP2012139363A (en) | 2010-12-28 | 2010-12-28 | Pachinko game machine |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2012139363A (en) |
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015058279A (en) * | 2013-09-20 | 2015-03-30 | 株式会社ソフイア | Game machine |
| JP2015097744A (en) * | 2013-11-20 | 2015-05-28 | 株式会社ニューギン | Game machine |
| JP2016119964A (en) * | 2014-12-24 | 2016-07-07 | ダイコク電機株式会社 | Game machine and game hall management system |
| JP2016179400A (en) * | 2016-07-22 | 2016-10-13 | 株式会社ソフイア | Game machine |
| JP6048706B1 (en) * | 2015-10-06 | 2016-12-21 | 株式会社サンセイアールアンドディ | Game machine |
| JP2016220835A (en) * | 2015-05-28 | 2016-12-28 | 株式会社大都技研 | Game machine |
| JP2016220836A (en) * | 2015-05-28 | 2016-12-28 | 株式会社大都技研 | Game machine |
| JP2017018513A (en) * | 2015-07-15 | 2017-01-26 | 株式会社高尾 | Pinball game machine |
| JP2017148294A (en) * | 2016-02-25 | 2017-08-31 | 株式会社サンセイアールアンドディ | Game machine |
| JP2017185151A (en) * | 2016-04-08 | 2017-10-12 | 京楽産業.株式会社 | Game machine |
| JP2017209122A (en) * | 2016-05-23 | 2017-11-30 | 株式会社三共 | Game machine |
| JP2018075306A (en) * | 2016-11-11 | 2018-05-17 | 株式会社平和 | Game machine |
| JP2018140300A (en) * | 2018-06-25 | 2018-09-13 | 株式会社大一商会 | Game machine |
| JP2018140299A (en) * | 2018-06-25 | 2018-09-13 | 株式会社大一商会 | Game machine |
| JP2021045688A (en) * | 2020-12-28 | 2021-03-25 | 株式会社大一商会 | Game machine |
| JP2021045687A (en) * | 2020-12-28 | 2021-03-25 | 株式会社大一商会 | Game machine |
| JP2021045689A (en) * | 2020-12-28 | 2021-03-25 | 株式会社大一商会 | Game machine |
| JP2021049432A (en) * | 2020-12-28 | 2021-04-01 | 株式会社大一商会 | Game machine |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005230221A (en) * | 2004-02-19 | 2005-09-02 | Okumura Yu-Ki Co Ltd | Game machine |
| JP2007044199A (en) * | 2005-08-09 | 2007-02-22 | Olympia:Kk | Game machine |
| JP2009247387A (en) * | 2008-04-01 | 2009-10-29 | Sankyo Co Ltd | Slot machine |
| JP2010057666A (en) * | 2008-09-03 | 2010-03-18 | Daiichi Shokai Co Ltd | Pachinko game machine |
| JP2011011082A (en) * | 2010-10-18 | 2011-01-20 | Sankyo Co Ltd | Game machine |
-
2010
- 2010-12-28 JP JP2010293974A patent/JP2012139363A/en active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005230221A (en) * | 2004-02-19 | 2005-09-02 | Okumura Yu-Ki Co Ltd | Game machine |
| JP2007044199A (en) * | 2005-08-09 | 2007-02-22 | Olympia:Kk | Game machine |
| JP2009247387A (en) * | 2008-04-01 | 2009-10-29 | Sankyo Co Ltd | Slot machine |
| JP2010057666A (en) * | 2008-09-03 | 2010-03-18 | Daiichi Shokai Co Ltd | Pachinko game machine |
| JP2011011082A (en) * | 2010-10-18 | 2011-01-20 | Sankyo Co Ltd | Game machine |
Cited By (21)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015058279A (en) * | 2013-09-20 | 2015-03-30 | 株式会社ソフイア | Game machine |
| JP2015097744A (en) * | 2013-11-20 | 2015-05-28 | 株式会社ニューギン | Game machine |
| JP2016119964A (en) * | 2014-12-24 | 2016-07-07 | ダイコク電機株式会社 | Game machine and game hall management system |
| JP2016220835A (en) * | 2015-05-28 | 2016-12-28 | 株式会社大都技研 | Game machine |
| JP2016220836A (en) * | 2015-05-28 | 2016-12-28 | 株式会社大都技研 | Game machine |
| JP2017018513A (en) * | 2015-07-15 | 2017-01-26 | 株式会社高尾 | Pinball game machine |
| JP6048706B1 (en) * | 2015-10-06 | 2016-12-21 | 株式会社サンセイアールアンドディ | Game machine |
| JP2017070431A (en) * | 2015-10-06 | 2017-04-13 | 株式会社サンセイアールアンドディ | Game machine |
| JP2017148294A (en) * | 2016-02-25 | 2017-08-31 | 株式会社サンセイアールアンドディ | Game machine |
| JP2017185151A (en) * | 2016-04-08 | 2017-10-12 | 京楽産業.株式会社 | Game machine |
| JP2017209122A (en) * | 2016-05-23 | 2017-11-30 | 株式会社三共 | Game machine |
| JP2016179400A (en) * | 2016-07-22 | 2016-10-13 | 株式会社ソフイア | Game machine |
| JP2018075306A (en) * | 2016-11-11 | 2018-05-17 | 株式会社平和 | Game machine |
| JP2018140300A (en) * | 2018-06-25 | 2018-09-13 | 株式会社大一商会 | Game machine |
| JP2018140299A (en) * | 2018-06-25 | 2018-09-13 | 株式会社大一商会 | Game machine |
| JP2021045688A (en) * | 2020-12-28 | 2021-03-25 | 株式会社大一商会 | Game machine |
| JP2021045687A (en) * | 2020-12-28 | 2021-03-25 | 株式会社大一商会 | Game machine |
| JP2021045689A (en) * | 2020-12-28 | 2021-03-25 | 株式会社大一商会 | Game machine |
| JP2021049432A (en) * | 2020-12-28 | 2021-04-01 | 株式会社大一商会 | Game machine |
| JP7169598B2 (en) | 2020-12-28 | 2022-11-11 | 株式会社大一商会 | game machine |
| JP7169597B2 (en) | 2020-12-28 | 2022-11-11 | 株式会社大一商会 | game machine |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5305367B2 (en) | Game machine | |
| JP5537411B2 (en) | Pachinko machine | |
| JP2012139363A (en) | Pachinko game machine | |
| JP5046255B2 (en) | Game machine | |
| JP5958997B2 (en) | Game machine | |
| JP5709234B1 (en) | Pachinko machine | |
| JP6183501B2 (en) | Game machine | |
| JP5729791B1 (en) | Pachinko machine | |
| JP5709233B1 (en) | Pachinko machine | |
| JP5649149B1 (en) | Pachinko machine | |
| JP5105560B2 (en) | Pachinko machine | |
| JP5787387B1 (en) | Pachinko machine | |
| JP5854532B2 (en) | Pachinko machine | |
| JP5787386B1 (en) | Pachinko machine | |
| JP6083827B2 (en) | Pachinko machine | |
| JP5959028B2 (en) | Pachinko machine | |
| JP5892626B2 (en) | Pachinko machine | |
| JP2012143612A (en) | Pachinko game machine | |
| JP6083826B2 (en) | Pachinko machine | |
| JP6083828B2 (en) | Pachinko machine | |
| JP5835859B2 (en) | Pachinko machine | |
| JP5863071B2 (en) | Pachinko machine | |
| JP6249069B2 (en) | Pachinko machine | |
| JP6249070B2 (en) | Pachinko machine | |
| JP6268448B2 (en) | Pachinko machine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20120612 |