JP2012123798A - ディスク電力管理方法、コンピュータ・プログラム、データ記憶デバイス、およびコンピュータ・システム - Google Patents
ディスク電力管理方法、コンピュータ・プログラム、データ記憶デバイス、およびコンピュータ・システム Download PDFInfo
- Publication number
- JP2012123798A JP2012123798A JP2011264177A JP2011264177A JP2012123798A JP 2012123798 A JP2012123798 A JP 2012123798A JP 2011264177 A JP2011264177 A JP 2011264177A JP 2011264177 A JP2011264177 A JP 2011264177A JP 2012123798 A JP2012123798 A JP 2012123798A
- Authority
- JP
- Japan
- Prior art keywords
- hard disk
- disk drive
- low power
- token
- value
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000007726 management method Methods 0.000 title claims description 34
- 238000004590 computer program Methods 0.000 title claims description 15
- 238000013500 data storage Methods 0.000 title claims description 10
- 230000007704 transition Effects 0.000 claims abstract description 67
- 238000000034 method Methods 0.000 claims description 46
- 230000015654 memory Effects 0.000 claims description 42
- 238000009987 spinning Methods 0.000 claims description 9
- 230000004044 response Effects 0.000 claims description 4
- 238000011156 evaluation Methods 0.000 claims 2
- 230000002411 adverse Effects 0.000 abstract 1
- 238000010586 diagram Methods 0.000 description 16
- 230000006870 function Effects 0.000 description 16
- 230000003287 optical effect Effects 0.000 description 13
- 238000004891 communication Methods 0.000 description 9
- 238000012545 processing Methods 0.000 description 7
- 230000008569 process Effects 0.000 description 5
- 238000013461 design Methods 0.000 description 4
- 230000009471 action Effects 0.000 description 3
- 238000005516 engineering process Methods 0.000 description 3
- 230000014509 gene expression Effects 0.000 description 3
- 230000009286 beneficial effect Effects 0.000 description 2
- 238000004364 calculation method Methods 0.000 description 2
- 230000001413 cellular effect Effects 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 230000000694 effects Effects 0.000 description 2
- 239000000835 fiber Substances 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000002093 peripheral effect Effects 0.000 description 2
- 239000004065 semiconductor Substances 0.000 description 2
- 239000007787 solid Substances 0.000 description 2
- 241000238876 Acari Species 0.000 description 1
- 238000009825 accumulation Methods 0.000 description 1
- 230000006399 behavior Effects 0.000 description 1
- 230000001010 compromised effect Effects 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 230000001934 delay Effects 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 230000005669 field effect Effects 0.000 description 1
- 239000004973 liquid crystal related substance Substances 0.000 description 1
- 230000007774 longterm Effects 0.000 description 1
- 239000000696 magnetic material Substances 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 230000002441 reversible effect Effects 0.000 description 1
- 230000001360 synchronised effect Effects 0.000 description 1
Images




Classifications
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B19/00—Driving, starting, stopping record carriers not specifically of filamentary or web form, or of supports therefor; Control thereof; Control of operating function ; Driving both disc and head
- G11B19/20—Driving; Starting; Stopping; Control thereof
- G11B19/2063—Spindle motor power-down sequences
- G11B19/2072—Spindle motor power-down sequences for the reduction of power consumption during idle time
-
- G—PHYSICS
- G11—INFORMATION STORAGE
- G11B—INFORMATION STORAGE BASED ON RELATIVE MOVEMENT BETWEEN RECORD CARRIER AND TRANSDUCER
- G11B19/00—Driving, starting, stopping record carriers not specifically of filamentary or web form, or of supports therefor; Control thereof; Control of operating function ; Driving both disc and head
- G11B19/02—Control of operating function, e.g. switching from recording to reproducing
Landscapes
- Power Sources (AREA)
Abstract
【解決手段】ハード・ディスク・ドライブの低電力移行の実際の数と比較した、信頼性に悪影響を与えることのない前記ハード・ディスク・ドライブの低電力移行の許容可能数に基づくトークン値が保持される。低電力移行の許容可能数は、ハード・ディスク・ドライブの寿命中に増加する。ハード・ディスク・ドライブが低電力移行を実行する前に、トークンが評価されて、ハード・ディスク・ドライブが低電力移行を実行することが許容されるかどうか決定される。検討される低電力移行は、ヘッドのパーキングおよびハード・ディスク・ドライブのスピン・ダウンを含む。
【選択図】図1
Description
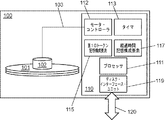
101 ディスク
102 モータ
103 リンク
110 ディスク・コントローラ
111 プロセッサ
112 モータ・コントローラ
113 タイマ
115 第1のトークン記憶構成要素
117 経過時間記憶構成要素
119 ディスク・インターフェース・ユニット
120 入出力バス
Claims (21)
- ハード・ディスク・ドライブによって消費される電力を管理する方法であって、
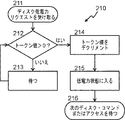
ハード・ディスク・ドライブの低電力移行の実際の数と比較した、前記ハード・ディスク・ドライブの低電力移行の許容可能数に基づく、トークン値を保持するステップであって、低電力移行の前記許容可能数は、前記ハード・ディスク・ドライブの寿命中に増加する、前記ステップと、
前記ハード・ディスク・ドライブが、電力を節約するために低電力状態にされるべきであると決定するステップと、
前記ハード・ディスク・ドライブが低電力移行を実行することが許容されるかどうかを決定するために、前記トークン値を評価するステップと、
前記ハード・ディスク・ドライブの前記低電力移行を許容すると前記トークン値が評価されれば、前記ハード・ディスク・ドライブの前記低電力移行を実行するステップと、
を含む、前記方法。 - 前記低電力移行は、
前記ハード・ディスク・ドライブをスピン・ダウンするステップ
を含む、請求項1に記載の方法。 - 前記低電力移行は、
前記ハード・ディスク・ドライブのヘッドをパーキングするステップ
を含む、請求項1に記載の方法。 - 前記トークン値の前記保持は、
周期的に前記トークン値をインクリメントするステップと、
前記ハード・ディスク・ドライブの前記低電力移行の実行と関連する時点に、前記トークン値をデクリメントするステップと、
を含み、前記トークン値の前記評価は、
前記トークン値が所定の値よりも大きければ、前記ハード・ディスク・ドライブに関して前記低電力移行が許容可能であると決定するステップ
を含む、請求項1に記載の方法。 - 前記所定の値は、ゼロである、請求項4に記載の方法。
- 前記ハード・ディスク・ドライブの前記低電力移行を実行する前に、前記ハード・ディスク・ドライブの前記低電力移行の実行を許容すると前記トークン値が評価されるのを待つステップ
をさらに含む、請求項1に記載の方法。 - 前記トークン値の前記保持は、
周期的に前記トークン値の第1のフィールドをインクリメントするステップと、
前記ハード・ディスク・ドライブの前記低電力移行の実行と関連する時点に、前記トークン値の第2のフィールドをインクリメントするステップと、
を含み、前記トークン値の前記評価は、
前記トークン値の前記第1のフィールドが前記トークン値の前記第2のフィールドよりも、少なくとも所定の値大きければ、前記ハード・ディスク・ドライブに関して前記低電力移行が許容可能であると決定するステップ
を含む、請求項1に記載の方法。 - 最後の電力管理移行のときからのタイマを保持するステップと、
前記ハード・ディスク・ドライブの前記低電力移行を実行する前に、前記タイマが所定の時間を超えるのを待つステップと、
をさらに含む、請求項1に記載の方法。 - ハード・ディスク・ドライブによって消費される電力を管理するためのコンピュータ・プログラムであって、前記コンピュータ・プログラムは、
非一時的コンピュータ可読記憶媒体を用いて具現化されたコンピュータ可読プログラム・コードを有する、前記非一時的コンピュータ可読記憶媒体
を含み、前記コンピュータ可読プログラム・コードは、
請求項1に記載の方法を実施するよう構成されたコンピュータ可読プログラム・コード
を含む、コンピュータ・プログラム。 - 回転可能な記憶媒体と、
前記回転可能な記憶媒体をスピンさせることができるモータと、
前記モータを制御することができ、トークン記憶構成要素および制御インターフェースを含むディスク・コントローラと、
を含むデータ記憶デバイスであって、前記ディスク・コントローラは、
前記トークン記憶構成要素に記憶された値を周期的にインクリメントし、
前記トークン記憶構成要素の前記値のリクエストに応答して、前記トークン記憶構成要素に記憶された前記値を、前記制御インターフェースを経由して提供するよう構成されている、データ記憶デバイス。 - 前記ディスク・コントローラは、
前記データ記憶デバイスを低電力状態にするリクエストを、前記制御インターフェースを介して受け取り、
前記トークン記憶構成要素に記憶された前記値が所定の値よりも大きければ、
前記トークン記憶構成要素に記憶された前記値をデクリメントし、
前記データ記憶デバイスを前記低電力状態にするようさらに構成されている、請求項10に記載のデータ記憶デバイス。 - 前記ディスク・コントローラは、
前記データ記憶デバイスを前記低電力状態にする前に、トークン記憶構成要素に記憶された前記値が前記所定の値よりも大きくなるのを待つようさらに構成されている、請求項11に記載のデータ記憶デバイス。 - 前記ディスク・コントローラは、
最後のディスク・アクセス・コマンドが前記制御インターフェースを介して受け取られたときからの経過時間を測定し、
前記経過時間が所定の経過時間を超え、前記トークン記憶構成要素に記憶された前記値が所定の値よりも大きければ、
前記トークン記憶構成要素に記憶された前記値をデクリメントし、
前記データ記憶デバイスを低電力状態にするようさらに構成されている、請求項10に記載のデータ記憶デバイス。 - プロセッサと、
前記プロセッサに通信可能に結合されたメモリと、
前記プロセッサに通信可能に結合されたディスク・インターフェース・ユニットと、
前記ディスク・インターフェース・ユニットに通信可能に結合されたハード・ディスク・ドライブと、
を含むコンピュータ・システムであって、前記ハード・ディスク・ドライブは、
回転可能な記憶媒体と、
前記回転可能な記憶媒体をスピンさせることができるモータと、
前記モータを制御することができるディスク・コントローラと、
を含み、前記コンピュータ・システムは、
前記ハード・ディスク・ドライブの低電力移行の実際の数と比較した、前記ハード・ディスク・ドライブの低電力移行の許容可能数であって、前記ハード・ディスク・ドライブの寿命中に増加する、前記許容可能数に基づくトークン値を保持し、
前記ハード・ディスク・ドライブが、電力を節約するために低電力状態にされるべきであると決定し、
前記ハード・ディスク・ドライブが低電力移行を実行することが許容されるかどうかを決定するために、前記トークン値を評価し、
前記ハード・ディスク・ドライブの前記低電力移行を許容すると前記トークン値が評価されれば、前記ハード・ディスク・ドライブの前記低電力移行を実行するよう構成されている、コンピュータ・システム。 - 前記コンピュータ・システムは、
前記ハード・ディスク・ドライブの前記低電力移行を実行する前に、前記ハード・ディスク・ドライブの前記低電力移行の実行を許容すると前記トークン値が評価されるのを待つようさらに構成されている、請求項14に記載のコンピュータ・システム。 - 前記トークン値は、前記メモリに記憶されている、請求項14に記載のコンピュータ・システム。
- 前記トークン値は、前記ディスク・コントローラに記憶されている、請求項14に記載のコンピュータ・システム。
- 前記プロセッサは、前記ハード・ディスク・ドライブを低電力状態にするためのコマンドを、前記ディスク・インターフェース・ユニットを経由して前記ディスク・コントローラへ送るよう構成されており、
前記ディスク・コントローラは、前記ハード・ディスク・ドライブの前記低電力移行を許容すると前記トークン値が評価されれば、前記コマンドに応答して前記ハード・ディスク・ドライブの前記低電力移行を実行するよう構成されている、請求項17に記載のコンピュータ・システム。 - 前記ディスク・コントローラは、
最後のディスク・アクセス・コマンドが受け取られたときからの経過時間を測定し、
前記経過時間が所定の経過時間を超えれば、前記ハード・ディスク・ドライブが低電力状態にされるべきであるという前記決定を実施し、
前記ハード・ディスク・ドライブの前記低電力移行を許容すると前記トークン値が評価されれば、前記ハード・ディスク・ドライブの前記低電力移行の前記実行を実施するよう構成されている、請求項17に記載のコンピュータ・システム。 - 前記低電力移行は、
前記ハード・ディスク・ドライブをスピン・ダウンすること
を含む、請求項14に記載のコンピュータ・システム。 - 前記低電力移行は、
前記ハード・ディスク・ドライブのヘッドをパーキングすること
を含む、請求項14に記載のコンピュータ・システム。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US12/962477 | 2010-12-07 | ||
| US12/962,477 US8677162B2 (en) | 2010-12-07 | 2010-12-07 | Reliability-aware disk power management |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2012123798A true JP2012123798A (ja) | 2012-06-28 |
| JP5828549B2 JP5828549B2 (ja) | 2015-12-09 |
Family
ID=46162025
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011264177A Expired - Fee Related JP5828549B2 (ja) | 2010-12-07 | 2011-12-02 | ディスク電力管理方法、コンピュータ・プログラム、データ記憶デバイス、およびコンピュータ・システム |
Country Status (4)
| Country | Link |
|---|---|
| US (2) | US8677162B2 (ja) |
| JP (1) | JP5828549B2 (ja) |
| CN (1) | CN102566737B (ja) |
| TW (1) | TW201232526A (ja) |
Families Citing this family (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9629200B2 (en) * | 2012-03-07 | 2017-04-18 | Telefonaktiebolaget L M Ericsson | Controlling connection states of a mobile terminal based on communication activity |
| US8917471B1 (en) * | 2013-10-29 | 2014-12-23 | Western Digital Technologies, Inc. | Power management for data storage device |
| TWI557734B (zh) * | 2015-11-20 | 2016-11-11 | 宇帷國際股份有限公司 | 固態硬碟 |
| TWI607433B (zh) * | 2015-11-20 | 2017-12-01 | 英信科技有限公司 | 固態硬碟 |
| JP6768425B2 (ja) * | 2016-09-08 | 2020-10-14 | キヤノン株式会社 | 情報処理装置及びその制御方法、並びにプログラム |
| JP6882072B2 (ja) | 2017-05-25 | 2021-06-02 | キヤノン株式会社 | 撮像装置、撮像装置の制御方法及びプログラム |
| US11079829B2 (en) | 2019-07-12 | 2021-08-03 | Micron Technology, Inc. | Peak power management of dice in a power network |
| US11454941B2 (en) | 2019-07-12 | 2022-09-27 | Micron Technology, Inc. | Peak power management of dice in a power network |
| US11175837B2 (en) * | 2020-03-16 | 2021-11-16 | Micron Technology, Inc. | Quantization of peak power for allocation to memory dice |
| JP2023145968A (ja) * | 2022-03-29 | 2023-10-12 | 京セラドキュメントソリューションズ株式会社 | 画像形成装置 |
| US20250071125A1 (en) * | 2023-08-25 | 2025-02-27 | Fortinet, Inc. | Systems and methods for hardware assisted initial and subsequent event detection |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004110922A (ja) * | 2002-09-18 | 2004-04-08 | Ricoh Co Ltd | 記憶装置の制御方法 |
| JP2007193449A (ja) * | 2006-01-17 | 2007-08-02 | Toshiba Corp | 情報記録装置及びその制御方法 |
| JP2007279952A (ja) * | 2006-04-05 | 2007-10-25 | Fuji Xerox Co Ltd | 機器 |
| JP2008114571A (ja) * | 2006-11-08 | 2008-05-22 | Fuji Xerox Co Ltd | 制御装置およびデータ処理装置 |
Family Cites Families (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5666538A (en) | 1995-06-07 | 1997-09-09 | Ast Research, Inc. | Disk power manager for network servers |
| US7007141B2 (en) | 2001-01-30 | 2006-02-28 | Data Domain, Inc. | Archival data storage system and method |
| US6925529B2 (en) | 2001-07-12 | 2005-08-02 | International Business Machines Corporation | Data storage on a multi-tiered disk system |
| US7120806B1 (en) * | 2001-10-31 | 2006-10-10 | Western Digital Technologies, Inc. | Method for setting a power operating mode transition interval of a disk drive in a mobile device based on application category |
| US20040015731A1 (en) | 2002-07-16 | 2004-01-22 | International Business Machines Corporation | Intelligent data management fo hard disk drive |
| US7188225B1 (en) * | 2003-12-05 | 2007-03-06 | Applied Micro Circuits Corporation | Storage system with disk drive power-on-reset detection |
| US7634615B2 (en) * | 2004-06-10 | 2009-12-15 | Marvell World Trade Ltd. | Adaptive storage system |
| US7106540B1 (en) * | 2005-06-03 | 2006-09-12 | International Business Machines Corporation | Ensuring rate of spin-up/spin-down cycles for spindle motor in a hard disk drive does not exceed rate spindle motor is designed to handle |
| US20070061509A1 (en) | 2005-09-09 | 2007-03-15 | Vikas Ahluwalia | Power management in a distributed file system |
| US7516348B1 (en) * | 2006-02-24 | 2009-04-07 | Emc Corporation | Selective power management of disk drives during semi-idle time in order to save power and increase drive life span |
| JP2007257577A (ja) | 2006-03-27 | 2007-10-04 | Nec Corp | Raid制御装置、方法及びプログラム並びにディスクアレイ装置 |
| US7425810B2 (en) | 2006-06-30 | 2008-09-16 | Lenovo (Singapore) Pte., Ltd. | Disk drive management |
| US7853809B2 (en) | 2007-01-11 | 2010-12-14 | Seagate Technology Llc | System and method of power management |
| US7702853B2 (en) | 2007-05-04 | 2010-04-20 | International Business Machines Corporation | Data storage system with power management control and method |
| US7814351B2 (en) | 2007-06-28 | 2010-10-12 | Seagate Technology Llc | Power management in a storage array |
| US8140754B2 (en) | 2008-01-03 | 2012-03-20 | Hitachi, Ltd. | Methods and apparatus for managing HDD's spin-down and spin-up in tiered storage systems |
| CN102016748A (zh) | 2008-04-21 | 2011-04-13 | 自适应计算企业股份有限公司 | 用于管理计算环境中的能量消耗的系统和方法 |
| US8028126B2 (en) | 2008-06-09 | 2011-09-27 | Oracle America, Inc. | Scheduling spin-up operations for a set of hard disk drives |
| US8495400B2 (en) | 2008-09-30 | 2013-07-23 | Seagate Technology Llc | Energy-efficient transitioning among device operating modes |
-
2010
- 2010-12-07 US US12/962,477 patent/US8677162B2/en not_active Expired - Fee Related
-
2011
- 2011-11-15 CN CN201110360032.9A patent/CN102566737B/zh not_active Expired - Fee Related
- 2011-11-28 TW TW100143529A patent/TW201232526A/zh unknown
- 2011-12-02 JP JP2011264177A patent/JP5828549B2/ja not_active Expired - Fee Related
-
2013
- 2013-02-27 US US13/779,698 patent/US8868950B2/en not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004110922A (ja) * | 2002-09-18 | 2004-04-08 | Ricoh Co Ltd | 記憶装置の制御方法 |
| JP2007193449A (ja) * | 2006-01-17 | 2007-08-02 | Toshiba Corp | 情報記録装置及びその制御方法 |
| JP2007279952A (ja) * | 2006-04-05 | 2007-10-25 | Fuji Xerox Co Ltd | 機器 |
| JP2008114571A (ja) * | 2006-11-08 | 2008-05-22 | Fuji Xerox Co Ltd | 制御装置およびデータ処理装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US8868950B2 (en) | 2014-10-21 |
| US20130170067A1 (en) | 2013-07-04 |
| CN102566737B (zh) | 2014-12-17 |
| US8677162B2 (en) | 2014-03-18 |
| CN102566737A (zh) | 2012-07-11 |
| JP5828549B2 (ja) | 2015-12-09 |
| US20120140355A1 (en) | 2012-06-07 |
| TW201232526A (en) | 2012-08-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5828549B2 (ja) | ディスク電力管理方法、コンピュータ・プログラム、データ記憶デバイス、およびコンピュータ・システム | |
| TWI621068B (zh) | 伺服器機架電力管理 | |
| CN104781755B (zh) | 用于提供处理器环境中的节电的系统和方法 | |
| US9116694B2 (en) | Efficient low power exit sequence for peripheral devices | |
| US9471134B2 (en) | Method and apparatus for managing power of a storage system | |
| US20140082242A1 (en) | Reducing latency in a peripheral component interconnect express link | |
| US20140325173A1 (en) | Memory controller mapping on-the-fly | |
| US9916104B2 (en) | Techniques for entry to a lower power state for a memory device | |
| US20110153928A1 (en) | Memory utilization tracking | |
| TWI541720B (zh) | 有效頻率提升操作之技術 | |
| US20090199026A1 (en) | Saving energy based on storage classes with corresponding power saving policies | |
| JP2011509461A (ja) | データ処理システムの強制アイドル | |
| JP2010165349A (ja) | 電力管理のためのアイドル期間報告 | |
| US10157657B2 (en) | Selective refresh with software components | |
| TWI641943B (zh) | 控制電源供應單元於閒置狀態期間的功率消耗之技術 | |
| EP3836145A1 (en) | System approach to reduce stable threshold voltage (vt) read disturb degradation | |
| TW201643685A (zh) | 磁碟驅動器速度管理方法與系統及其相關非暫態電腦可讀取存取媒體 | |
| US9134784B2 (en) | Predictive power state transitions for information handling devices | |
| CN101840263A (zh) | 控制usb大容量存储器功率消耗的方法以及个人计算机 | |
| US7602570B2 (en) | Motor power controller for a disk drive, disk drive comprising a motor power controller and method for controlling the motor power of a disk drive | |
| TWI235298B (en) | Method to read the battery status by the operating system of portable computer | |
| JP6143482B2 (ja) | 電子機器および省電力制御方法 | |
| TW201918892A (zh) | 在現代待機模式或連線待機模式下操作固態硬碟之方法及相關固態硬碟 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20140707 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20150520 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20150630 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20150717 Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150717 |
|
| RD12 | Notification of acceptance of power of sub attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7432 Effective date: 20150717 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20150721 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150928 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20150929 |
|
| RD14 | Notification of resignation of power of sub attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7434 Effective date: 20150929 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20151016 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5828549 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |