JP2011500138A - 腸疾患を治療する装置および方法 - Google Patents
腸疾患を治療する装置および方法 Download PDFInfo
- Publication number
- JP2011500138A JP2011500138A JP2010528835A JP2010528835A JP2011500138A JP 2011500138 A JP2011500138 A JP 2011500138A JP 2010528835 A JP2010528835 A JP 2010528835A JP 2010528835 A JP2010528835 A JP 2010528835A JP 2011500138 A JP2011500138 A JP 2011500138A
- Authority
- JP
- Japan
- Prior art keywords
- intestine
- selected portion
- narrowing
- intestinal
- constriction
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images
















































Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/02—Prostheses implantable into the body
- A61F2/04—Hollow or tubular parts of organs, e.g. bladders, tracheae, bronchi or bile ducts
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M1/00—Suction or pumping devices for medical purposes; Devices for carrying-off, for treatment of, or for carrying-over, body-liquids; Drainage systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N1/00—Electrotherapy; Circuits therefor
- A61N1/02—Details
- A61N1/04—Electrodes
- A61N1/05—Electrodes for implantation or insertion into the body, e.g. heart electrode
- A61N1/0507—Electrodes for the digestive system
- A61N1/0509—Stomach and intestinal electrodes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61N—ELECTROTHERAPY; MAGNETOTHERAPY; RADIATION THERAPY; ULTRASOUND THERAPY
- A61N1/00—Electrotherapy; Circuits therefor
- A61N1/18—Applying electric currents by contact electrodes
- A61N1/32—Applying electric currents by contact electrodes alternating or intermittent currents
- A61N1/36—Applying electric currents by contact electrodes alternating or intermittent currents for stimulation
- A61N1/36007—Applying electric currents by contact electrodes alternating or intermittent currents for stimulation of urogenital or gastrointestinal organs, e.g. for incontinence control
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/02—Prostheses implantable into the body
- A61F2/04—Hollow or tubular parts of organs, e.g. bladders, tracheae, bronchi or bile ducts
- A61F2002/045—Stomach, intestines
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2250/00—Special features of prostheses classified in groups A61F2/00 - A61F2/26 or A61F2/82 or A61F9/00 or A61F11/00 or subgroups thereof
- A61F2250/0001—Means for transferring electromagnetic energy to implants
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61M—DEVICES FOR INTRODUCING MEDIA INTO, OR ONTO, THE BODY; DEVICES FOR TRANSDUCING BODY MEDIA OR FOR TAKING MEDIA FROM THE BODY; DEVICES FOR PRODUCING OR ENDING SLEEP OR STUPOR
- A61M2210/00—Anatomical parts of the body
- A61M2210/10—Trunk
- A61M2210/1042—Alimentary tract
- A61M2210/1064—Large intestine
Abstract
Description
腸の選択された部分の筋肉または神経組織を電気的に刺激して、選択された部分を少なくとも部分的に収縮させる電気刺激デバイスを設けることができる。このような刺激デバイスを狭さくデバイスの補助部材として使用すると、患者の腸を特に慎重に治療することができ、したがって、後述の本発明の実施形態から明らかなように、経時的に腸を損傷する可能性が最小限に抑えられる。
ポンプの考えられる様々な構成を含む本発明の実施形態について以下に説明する。
選択された部分を狭さくさせて選択された部分の上流側端部の所で腸の通路を閉鎖するように上流側の第1の狭さく部材を制御し、
選択された部分をその上流側端部と下流側端部との間で狭さくさせて、選択された部分に含まれる腸内容物が腸の通路内を下流側に移動するように制御するように構成される。
制御デバイスはさらに、
選択された部分を解放して、選択された部分の上流側の腸の通路内の腸内容物が選択された部分に進入するのを可能にするように第1および第2の狭さく部材を制御するように構成される。
i.選択された部分を軽く狭さくさせて、選択された部分の上流側端部の所で腸の通路の断面積を少なくともかなり小さくするように上流側の第1の狭さく部材を制御し、
ii.第1の狭さく部材が選択された部分を狭さくさせる場合に選択された部分を刺激して、選択された部分を収縮させ、選択された部分の上流側端部の所で腸の通路を閉鎖するように刺激デバイスを制御し、
iii.選択された部分をその上流側端部と下流側端部との間で狭さくさせて、選択された部分に含まれる腸内容物が腸の通路内を下流側に移動するように第2の狭さく部材を制御する。
任意に、刺激デバイスは、第2の狭さく部材が選択された部分を狭さくさせる場合に選択された部分を電気的に刺激して腸の通路の体積を低減させることによって第2の狭さく部材と協働することができる。具体的には、制御デバイスは、第2の狭さくデバイスが選択された部分を狭さくさせる場合に選択された部分を連続的に刺激し、したがって、第2の狭さく部材によって狭さくされる選択された部分が徐々に収縮するように刺激デバイスを制御することができる。その結果、腸内容物は、腸の通路内を蠕動しながら変位する。あるいは、狭さくデバイスは、細長い単一の狭さく部材のみを含んでよく、この場合、制御デバイスは、狭さく部材が選択された部分を狭さくさせる場合に選択された部分を連続的に刺激し、したがって、狭さく部材によって狭さくされる選択された部分は徐々に収縮し、それによって、腸内容物は、腸の通路内を蠕動しながら変位する。
選択された部分を狭さくさせて選択された部分の上流側端部の所で腸の通路を閉鎖するように上流側の第1の狭さく部材を制御し、
選択された部分を解放するように下流側の第2の狭さく部材を制御し、
選択された部分をその上流側端部と下流側端部との間で狭さくさせて、選択された部分に含まれる腸内容物が腸の通路内を下流側に移動するように第3の狭さく部材を制御するように構成される。
選択された部分を狭さくさせて選択された部分の下流側端部の所で腸の通路を閉鎖するように下流側の第2の狭さく部材を制御し、
選択された部分を解放するように上流側の第1の狭さく部材を制御し、
選択された部分をその上流側端部と下流側端部との間で解放して、選択された部分の上流側の腸の通路内の腸内容物が選択された部分に進入するのを可能にするように第3の狭さく部材を制御するようにも構成される。
選択された部分を軽く狭さくさせて、選択された部分の上流側端部の所で腸の通路の断面積を少なくともかなり小さくするように上流側の第1の狭さく部材を制御し、
第1の狭さく部材が選択された部分を狭さくさせる場合に選択された部分を電気的に刺激して、選択された部分を収縮させ、選択された部分の上流側端部の所で腸の通路を閉鎖するように刺激デバイスを制御し、
選択された部分を解放するように下流側の第2の狭さく部材を制御し、
選択された部分をその上流側端部と下流側端部との間で狭さくさせて、選択された部分に含まれる腸内容物が腸の通路内を下流側に移動するように第3の狭さく部材を制御する。
選択された部分を軽く狭さくさせて、選択された部分の上流側端部の所で腸の通路の断面積を少なくともかなり小さくするように下流側の第2の狭さく部材を制御し、
第2の狭さく部材が選択された部分を狭さくさせる場合に選択された部分を刺激して、選択された部分を収縮させ、選択された部分の上流側端部の所で腸の通路を閉鎖するように刺激デバイスを制御し、
選択された部分を解放するように上流側の第1の狭さく部材を制御し、
選択された部分をその上流側端部と下流側端部との間で解放して、選択された部分の上流側の腸の通路内の腸内容物が選択された部分に進入するのを可能にするように第3の狭さく部材を制御する。
選択された部分を狭さくさせて選択された部分の上流側端部の所で腸の通路を閉鎖するように上流側の第1の狭さく部材を制御し、
選択された部分を解放するように下流側の第2の狭さく部材を制御し、
選択された部分をその上流側端部と下流側端部との間で連続的に刺激して、選択された部分を徐々に収縮させ、したがって、腸内容物が腸の通路内を蠕動しながら変位するように刺激デバイスを制御する。
選択された部分を狭さくさせて、選択された部分の下流側端部の所で腸の通路を閉鎖するように下流側の第2の狭さく部材を制御し、
選択された部分を解放するように上流側の第1の狭さく部材を制御し、
選択された部分をその上流側端部と下流側端部との間で刺激するのを停止し、選択された部分の上流側の腸の通路内の腸内容物が選択された部分に進入するのを可能にするように刺激デバイスを制御する。
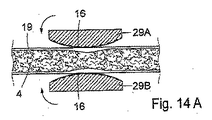
本発明の一実施形態では、腸の選択された部分に係合して腸の通路を閉鎖するか、あるいはポンプの非動作時に選択された部分を少なくとも部分的に狭さくさせ、かつポンプの動作時に選択された部分を解放して腸の通路を開放するように構成された移植可能で取り外し可能な少なくとも1つの閉鎖部材が設けられる。好ましくは、閉鎖部材は、ポンプの非動作時に、選択された部分を少なくとも部分的に狭さくさせて腸の通路の断面積を少なくともかなり小さくし、上述の刺激デバイスは、腸の筋肉または神経組織を電気的に刺激し、閉鎖部材が腸を狭さくさせる場合に腸を収縮させて腸の通路を完全に閉鎖するように構成される。刺激デバイスの電極は、閉鎖部材から分離されるかあるいは閉鎖部材と一体化され、好適には、閉鎖部材の、腸に接触する表面に沿って分散される。制御デバイスは、閉鎖部材と刺激デバイスが協働して、狭さくした腸の血管内で血液を十分に循環させ、したがって、腸組織が、ポンプの非動作時に、閉鎖部材に長時間さらされた後でその完全性を維持するように閉鎖部材および刺激デバイスを制御する。ポンプが、上述のように刺激デバイスの電極を備えた細長い狭さく部材を含む場合、制御デバイスは、ポンプが動作する場合に、電極を可変的に通電して、狭さくした腸の血管内で血液を常に十分に循環させることができる。
上述の別個の閉鎖部材を設ける代わりに、ポンプの非動作時に、ポンプの狭さくデバイスが選択された部分を少なくとも部分的に狭さくした状態に維持する休止位置に、狭さくデバイスを維持することができる。狭さくデバイスは、この休止位置にあるとき、狭さくした腸の血管内で血液を十分に循環させる程度に選択された部分を狭さくさせ、したがって、腸組織は、狭さくデバイスに長時間さらされた後でその完全性を維持する。さらに、狭さくデバイスは、休止位置にあるときに、腸を狭さくさせて腸の通路の断面積を少なくともかなり小さくし、上述の刺激デバイスは、狭さくデバイスが腸を狭さくさせる場合に腸を電気的に刺激し、腸を収縮させて腸の通路を完全に閉鎖するように構成される。好ましくは、制御デバイスは、刺激デバイスの電極を選択された部分に沿って可変的に通電して、選択された部分上の電極の位置を経時的に変化させる選択された部分の部分的な収縮を生じさせるように刺激デバイスを制御し、それによって、腸の、現在刺激されていない部分は、それが再び刺激される前にほぼ正常な血液循環を回復することができる。
本発明の実施形態では、人工腸部材が、患者の腸に外科的に接合され、腸の通路の一部を形成し、かつ狭さくデバイスによって狭さくされる腸の選択された部分の少なくとも一部を形成する。この実施形態の顕著な利点は、上述の様々なポンプ構成の狭さくデバイスを使用して人工腸部材だけでなく傷つきやすい腸にも作用することができることである。ポンプの非動作時に、狭さくデバイスは、人工腸部材を狭さくさせて腸の通路を完全に閉鎖することができる。
ポンプの狭さくデバイスに動作可能に連結された皮下移植可能なアクチュエータを設けることができ、この場合、アクチュエータは、狭さくデバイスを操作するように手動で作動可能である。
本発明の一実施形態では、ポンプは動力を供給される。制御デバイスは、動力ポンプを始動させ停止する手動操作可能なスイッチを含んでよく、このスイッチが、患者に皮下移植できるように構成される。あるいは、制御デバイスは、好適には無線リモート・コントロールを保持する患者によって、ポンプを制御し、すなわち始動させ停止するように操作される無線リモート・コントロールを含んでよい。
本発明の一実施形態では、患者の物理的パラメータまたは装置の機能的パラメータを直接または間接的に検知する移植可能なセンサが設けられる。物理的パラメータに関して、制御デバイスは、ポンプの非動作時に、センサが物理的パラメータの値がしきい値を超えたことを検知したことに応答して音声信号や表示情報などの表示を生成することができる。物理的パラメータは、腸の選択された部分における腸内容物の体積、腸壁の寸法、または腸の選択された部分における圧力であってよい。
本発明の上記の実施形態のいずれかでは、患者の体外に位置するように構成された外部データ通報器と、患者に移植可能であり外部通報器と通信する内部データ通報器とを設けることができる。内部データ通報器は、患者に関する情報を外部データ通報器にフィードバックし、かつ/あるいは外部データ通報器は内部データ通報器にデータを送る。
本発明の第2の態様によれば、腸の通路に関する疾患を有する患者を治療する方法が提供される。この方法は、
a)患者の腸の選択された部分を狭さくさせて、選択された部分に沿って腸の通路の体積を少なくともかなり低減させ、したがって、腸内容物が腸の通路を通ってその下流側方向に変位するステップと、
b)選択された部分を解放して選択された部分に沿って腸の通路の体積を増大させ、したがって、選択された部分の上流側の腸の通路内の腸内容物が選択された部分に進入するステップと、
c)ステップ(a)およびステップ(b)を任意の回数だけ繰り返すステップとを含む。
選択された部分を部分的に狭さくさせて、選択された部分の上流側端部の所で腸の通路の断面積を少なくともかなり小さくし、
狭さくした選択された部分の筋肉または神経組織を上流側端部の所で電気的に刺激し、狭さくした選択された部分を収縮させて選択された部分の上流側端部の所で腸の通路を閉鎖し、
次に、選択された部分全体を狭さくさせることによって実行される。
選択された部分を部分的に狭さくさせて、選択された部分の上流側端部の所で腸の通路の断面積を少なくともかなり小さくし、
狭さくした選択された部分の筋肉または神経組織を上流側端部の所で電気的に刺激し、狭さくした選択された部分を収縮させて選択された部分の上流側端部の所で腸の通路を閉鎖し、
選択された部分全体を少なくとも部分的に狭さくさせ、
次に、選択された部分をその上流側端部から下流側端部まで連続的に刺激して選択された部分を徐々に収縮させ、したがって、腸内容物を腸の通路内を蠕動させながら変位させることによって実行される。
選択された部分を部分的に狭さくさせて、選択された部分全体に沿って腸の通路の断面積を少なくともかなり小さくし、
狭さくした部分をその上流側端部から下流側端部まで連続的に刺激して、選択された部分を徐々に収縮させ、したがって、腸内容物を腸の通路内を蠕動させながら変位させることによって実行される。
腸の一連の選択された部分の一部を連続的に狭さくさせ、したがって、各狭さく部に、腸の通路の断面積を少なくともかなり小さくさせ、
各狭さく部を電気的に刺激し、腸の狭さくした部分を収縮させて腸の通路を閉鎖し、それによって、腸内容物を腸の通路内を下流側に蠕動させながら変位させることによって実行される。
選択された部分を電気的に刺激して選択された部分を収縮させ、
収縮した選択された部分を徐々に狭さくさせ、したがって、腸内容物を腸の通路内を下流側に蠕動させながら変位させることによって実行される。
腸の選択された部分に係合して選択された部分を狭さくさせたり解放したりする狭さくデバイスを含むポンプを設けるステップと、
選択された部分を狭さくさせて選択された部分に沿って腸の通路の体積を少なくともかなり低減させることと、選択された部分を解放して選択された部分に沿って腸の通路の体積を増大させることを交互に行い、したがって、腸内容物が腸の通路を通って変位するように狭さくデバイスを動作させるようにポンプを制御するステップとを含む。
上述の装置を設けるステップと、
チューブ状の針を患者の体の腹部に挿入するステップと、
チューブを通ってガスを供給して腹部をガスで満たし、それによって腹腔を膨張させるステップと、
少なくとも2つの腹腔鏡トロカールを患者の体内に配置するステップと、
一方のトロカールを通って腹部にカメラを挿入するステップと、
患者の腸の一部を選択するステップと、
一方のトロカールを通って切開器具を挿入し、選択された部分におけるある領域を切開するステップと、
装置のポンプを腸の選択された部分に動作可能に係合するように切開した領域に配置するステップと、
ポンプを使用して腸内容物を腸の通路を通って汲み出すステップとを含む。方法(I)は、患者の皮膚および腹壁を切開して開口部を設け、ろう孔を形成する開口部に患者の腸を通し、患者の腸の、ろう孔の近傍の部分を選択することをさらに含んでよく、この場合、ポンプを使用して腸内容物がろう孔を通って排出される。
上述の装置を設けるステップと、
患者の皮膚および腹壁を切開して開口部を設けるステップと、
患者の腸の一部を選択するステップと、
開口部を通って切開器具を挿入し、選択された部分におけるある領域を切開するステップと、
装置のポンプを腸の選択された部分に動作可能に係合するように切開した領域に配置するステップと、
ポンプを使用して腸内容物を腸の通路を通って汲み出すステップとを含む。
患者の皮膚および腹壁を切開して開口部を設け、ろう孔を形成する開口部に患者の腸の一部を通すステップと、
腸を切開して、腸の、ろう孔を形成する短い部分を腸の残りの部分から分離し、一方、腸の短い部分に連結された腸間膜の血管を維持して腸の短い部分への血液の供給を確保するステップと、
腸の短い部分の所の領域を切開するステップと、
切開した領域内に人工腸部材を配置し、腸の短い部分および腸の残りの部分に人工腸部材を外科的に接合して、腸の残りの部分、人工腸部材、および腸の短い部分を通る腸の連続的な通路を形成し、人工腸部材が、患者の腸の選択された部分を形成するステップと、
上述の装置を設けるステップと、
装置のポンプを人工腸部材に動作可能に係合するように配置するステップと、
ポンプを使用して腸内容物を腸の通路を通ってろう孔から汲み出すステップとを含む。
選択された部分における腸の通路を少なくとも部分的に制限して腸内容物が通過するのを防止するか、あるいは
腸を解放し、ポンプを使用することによって腸内容物を汲み出すのを可能にするように取り外し可能な閉鎖部材を制御することをさらに含む。
患者の体外からポンプを制御するように構成された無線リモート・コントロールを設けることと、
患者が排便を望むときに、患者によって無線リモート・コントロールを操作してポンプを始動させ、患者が排便を終了したときにポンプを停止させることとを含む。
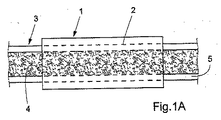
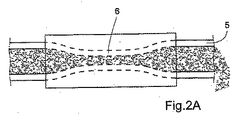
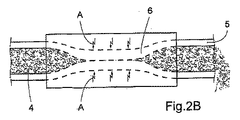
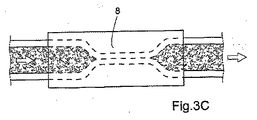
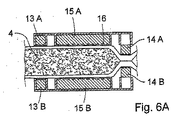
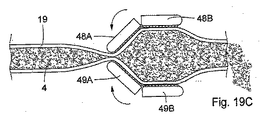
4 (腸の)通路; 5 開放端部; 6 腸壁; 7 ポンプ; 8 狭さく部;
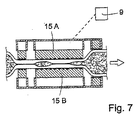
9 制御デバイス; 10 狭さく部。
Claims (191)
- 腸の通路に関連した障害を有する患者を治療する装置であって、
腸の内容物を腸の通路を通してポンプ輸送するために、腸の少なくとも一つの選択された部分に手術可能な植込み用ポンプを備え、前記ポンプは、交互に狭さくと解放とを少なくとも選択された部分に対して行って、腸の選択された部分の通路量を、狭さくにより実質的に減らし、そして解放により実質的に増加させる狭さくデバイスを含み、腸の内容物が腸の通路を通して移動させられる、
ことを特徴とする装置。 - 前記ポンプを制御して、前記狭さくデバイスの作動で、選択された部分を交互に狭さくおよび解放させるための制御装置を備え、腸の内容物が腸の通路を通して移動させられる、請求項1に記載の装置。
- 前記制御装置が患者によって動作させ得る請求項2に記載の装置。
- 前記制御装置は無線の遠隔制御装置を含む、請求項2に記載の装置。
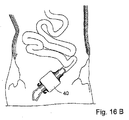
- 患者の腸は、外科的に処置された自然のまたは人工のストマで終端し、前記ポンプは腸の内容物を前記ストマから排出させるのに適している、請求項1に記載の装置。
- 患者の腸は、前記選択された部分は、患者の肛門で終端し、前記ポンプは腸の内容物を前記肛門から排出させるのに適している、請求項1に記載の装置。
- 前記係合デバイスは、前記ポンプに係合でき、且つ、前記ポンプを患者の腹腔に関連した組織に係合させる係合デバイスを含む、請求項1に記載の装置。
- 前記係合デバイスは、前記ポンプを患者の腹壁に係合するのに適している請求項7に記載の装置。
- 腸の選択された部分を少なくとも部分的にカバーする、弾力的な保護チューブを備え、前記狭さくデバイスは、前記保護チューブおよび選択された部分を狭さくさせる、請求項1に記載の装置。
- 前記狭さくデバイスは、腸の選択された部分を、それの狭さくの際に支持する埋込み可能なサポートを含む、請求項1に記載の装置。
- 前記狭さくデバイスは、組織または患者のボディの骨に対して選択された部分を狭さくするのに適している請求項1に記載の装置。
- 腸の選択された部分の筋肉または神経組織に電気的に刺激的を与え、選択された部分の部分的な収縮を生じさせる、刺激デバイスを備える、請求項1に記載の装置。
- 前記刺激デバイスには、少なくとも一つの電極が設けられて、電気的パルスで、腸の組織の選択された部分の筋肉または神経組織に刺激を与えるように構成されている、請求項12に記載の装置。
- 前記刺激デバイスに、前記狭さくデバイスとは別にまたは共用で、複数の電極が設けられている、請求項12に記載の装置。
- 前記電極は、腸の選択された部分に沿って、一連の電極を形成する、請求項14に記載の装置。
- 前記刺激デバイス用の制御装置が更に設けられる、請求項12に記載の装置。
- 前記刺激デバイスは、前記狭さくデバイスとは別にまたは共用で、複数の電極を有し、前記刺激デバイス用の制御装置は、時間とともに選択された部分のそれらの位置を変える選択された部分の部分的な収縮を引き起こすために選択された部分に沿って可変的に前記電極で付勢する、請求項16に記載の装置。
- 前記制御装置は、前記刺激デバイスを予め設定された方式に従う前記電極で付勢するように制御する請求項17に記載の装置。
- 前記制御装置は、前記刺激デバイスを前記電極で付勢するために制御し、前記電極群は腸の中で上流の、または、下流に方向において次第にエネルギーを与えられる請求項17に記載の装置。
- 前記制御装置は前記刺激デバイスを前記電極に付勢するために制御する。そうすると、前記電極は順番に一つずつ付勢される、または、ランダムに、または、所定パターンによれば、前記電極の群は順次エネルギーを与えられる請求項17に記載の装置。
- 前記狭さくデバイスに、交互に狭窄して、選択された部分をリリースするために選択された部分および前記制御装置制御文字前記狭さく素子を締めつけて、発表するための少なくとも一つの狭さく素子が設けられている請求項2に記載の装置。
- 前記狭さくデバイスは、少なくとも1つの狭さく素子を有し、当該狭さく素子によって選択された部分の筋肉または神経組織が電気的な刺激を与える刺激デバイスを含み、前記狭さく素子は、細長く延長され、前記制御装置が前記刺激デバイスを連続して、前記細長い狭さく素子が選択された部分を刺激するように制御するのに適しており、腸の通路内の内容物が蠕動運動状に移動させられる、請求項21に記載の装置。
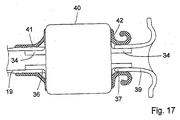
- 前記狭さくデバイスは、その上流端で選択された部分を狭さくし解放するための第1の狭さく素子、および、その下流端との間の選択された部分を狭さくし解放するための第2の狭さく素子を有し、前記第1および第2の狭さく素子を交互に押えて、それぞれに互いに選択された部分を解放する制御デバイスを備えている、請求項21に記載の装置。
- (i) 選択された部分の上流端で腸の通路を閉鎖するために選択された部分を狭さくするよう前記上流の第1の狭さく素子に対する制御と、
(ii)前記第2の狭さく素子を通路において腸の下流に選択された部分に含まれる腸の内容を移動するためにその上流で下流の端との間に選択された部分を狭さくするための制御と
を前記制御デバイスが行う、請求項23に記載の装置。 - 前記第1および第2の狭さく素子を選択された部分に入るために選択された部分の上流で腸の通路の腸の内容を許容するために選択された部分をリリースするために制御する、請求項23に記載の装置。
- 腸の選択された部分の電気的に刺激的な筋肉または神経組織によって選択された部分の最も少なく部分的な収縮で生じる刺激デバイスから更に成る、請求項22に記載の装置。
- 前記刺激デバイスは、前記狭さくデバイスの少なくとも一つの前記狭さく元素の表面に沿って一連の電極を形成している複数の電極と、腸の選択された部分を接触させている前記表層と、電気的パルスを有する選択された部分の筋肉または神経組織を刺激するのに適している前記電極とを備える、請求項25に記載の装置。
- 前記刺激デバイスは、前記第1の狭さく素子および前記第2の狭さく素子のうちの1つが選択された部分を競作する選択された部分を電気的に刺激するのに適している、請求項25に記載の装置。
- (i) 少なくとも選択された部分の上流端で腸の通路の断面積を実質的に減少させるために穏やかに選択された部分を狭さくする前記上流の第1の狭さく素子の制御と、
(ii)前記第1の狭さく素子が選択された部分の収縮に選択された部分および上流端で腸の通路を閉鎖させるために選択された部分を狭さくする選択された部分を刺激する前記刺激デバイスの制御と、
(iii) 前記第2の狭さく素子を通路において腸の下流に選択された部分に含まれる腸の内容を移動するためにその上流で下流の端との間に選択された部分を競作するために制御と、
を前記制御デバイスが行う、請求項25に記載の装置。 - 前記制御装置は、前記刺激デバイスを前記第2の狭さく素子が腸の通路量を減らすために選択された部分を狭さくする選択された部分を刺激するために制御するのに適している、請求項29に記載の装置。
- 前記制御装置は前記刺激デバイスを連続して、前記第2の狭さく素子が選択された部分を狭さくする選択された部分を刺激するために制御するのに適している。そうすると、要素が契約されて次第にある前記第2の狭さく、それで、その腸の内容によって締めつけられる選択された部分はぜん動性の方法の腸の通路において移動する、請求項30に記載の装置。
- 前記狭さくデバイスは、その上流端で選択された部分を締めつけて、リリースするための第1の狭さく素子、その下流側端部で選択された部分を締めつけて、リリースするための第2の狭さく素子およびその上流で下流の端との間に選択された部分を締めつけて、リリースするための3分の1狭さく素子を有し、デバイスが前記第1で、第2で、第3の狭さく素子を交互に押えて、それぞれに互いに選択された部分をリリースするために制御する前記制御を備えている、請求項21に記載の装置。
- (i) 選択された部分の上流端で腸の通路を閉鎖するために選択された部分を狭さくする制御前記上流の第1の狭さく素子の制御と、
(ii)選択された部分を解放する前記下流の第2の狭さく素子の制御と、
(iii) 前記第三段狭さく素子を通路において腸の下流に選択された部分に含まれる腸の内容を移動するためにその上流で下流の端との間に選択された部分を狭さくするために制御と、
を前記制御デバイスが行う、請求項32に記載の装置。 - (i) 選択された部分の下流側端部で腸の通路を閉鎖するために選択された部分を狭さくする制御前記下流の第2の狭さく素子の制御と、
(ii)選択された部分をリリースする制御前記上流の最初の狭さく素子の制御と、
(iii) 前記第三段狭さく素子を選択された部分に入るために選択された部分の上流で腸の通路の腸の内容を許容するためにその上流で下流の端との間に選択された部分をリリースするための制御と、
を前記制御デバイスが行う、請求項33に記載の装置。 - 腸の選択された部分の電気的に刺激的な筋肉または神経組織によって選択された部分の最も少なく部分的な収縮で生じる刺激デバイスから更に成る、請求項32に記載の装置。
- 前記刺激デバイスは、前記狭さくデバイスの少なくとも一つの前記狭さく元素の表面に沿って一連の電極を形成している複数の電極と、腸の選択された部分を接触させている前記表層と、電気的パルスを有する選択された部分の筋肉または神経組織を刺激するのに適している前記電極とを備える、請求項35に記載の装置。
- 前記刺激デバイスは、前記第1の狭さく素子および前記第2の狭さく素子のうちの1つが選択された部分を狭さくする選択された部分を電気的に刺激するのに適している、請求項35に記載の装置。
- 前記刺激デバイスは、前記第三段狭さく素子が選択された部分を狭さくする選択された部分を電気的に刺激するのに適している、請求項35に記載の装置。
- (i) 少なくとも選択された部分の上流端で腸の通路の断面積を実質的に減少させるために穏やかに選択された部分を狭さくする制御前記上流の第1の狭さく素子の制御と、
(ii)前記第1の狭さく素子が選択された部分の収縮に選択された部分の上流端で腸の通路を閉鎖させるために選択された部分を狭さくする選択された部分を刺激する前記刺激デバイスの制御と、
(iii) 選択された部分をリリースする制御前記下流の第2の狭さく素子の制御と、
(iv)前記第三段狭さく素子を通路において腸の下流に選択された部分に含まれる腸の内容を移動するためにその上流で下流の端との間に選択された部分を狭さくするための制御と、
を前記制御デバイスが行う、請求項35に記載の装置。 - (i) 少なくとも選択された部分の下流側端部で腸の通路の断面積を実質的に減少させるために穏やかに選択された部分を狭さくする制御前記下流の第2の狭さく素子の制御と、
(ii)前記第2の狭さく素子が選択された部分の収縮に選択された部分の下流側端部で腸の通路を閉鎖させるために選択された部分を狭さくする選択された部分を刺激する前記刺激デバイスの制御と、
(iii) 選択された部分をリリースする制御前記上流の第1の狭さく素子の制御と、
(iv)前記第三段狭さく素子を選択された部分に入るために選択された部分の上流で腸の通路の腸の内容を許容するためにその上流で下流の端との間に選択された部分を解放するための制御と
を前記制御デバイスが行う、請求項39に記載の装置。 - 前記制御装置は、前記刺激デバイスを前記第三段狭さく素子が腸の通路量を減らすために選択された部分を狭さくする選択された部分を刺激するために制御するのに適している、請求項39に記載の装置。
- 前記制御装置は前記刺激デバイスを連続して、前記第三段狭さく素子が選択された部分を狭さくする選択された部分を刺激するために制御するのに適している。そうすると、狭さく素子が契約されて次第にある前記第三段、それで、その腸の内容によって締めつけられる選択された部分はぜん動性の方法の腸の通路において位置がずれる、請求項41に記載の装置。
- 前記狭さく素子は安静位(前記狭さく素子が腸の通路を閉鎖するために穏やかに選択された部分を狭さくする)において維持されるのに適している。そのとき、前記ポンプは運転中でない、請求項21に記載の装置。
- 腸の選択された部分の電気的に刺激的な筋肉または神経組織によって選択された部分の最も少なく部分的な収縮で生じる刺激デバイスから更に成る、請求項43に記載の装置。
- 前記狭さく素子は安静位(前記狭さく素子が少なくとも腸の通路の断面積を実質的に減少させるために穏やかに選択された部分を狭さくする)において維持されるのに適している。そのとき、前記ポンプは運転中でない、そして、前記制御装置は前記刺激デバイスを前記狭さく素子が腸の通路を閉鎖するために選択された部分を狭さくする選択された部分を刺激するために制御する、請求項44に記載の装置。
- 前記安静位は腸の選択された部分の血管の充分な血行を考慮に入れる。そうすると、選択された部分の腸の組織は選択された部分を締めつけている前記狭さく素子にそれらの完全性に続いている長時間曝露を維持する、請求項44に記載の装置。
- 前記最初の、どの少なくとも一つの前記狭さく素子が少なくとも腸の通路の断面積を実質的に減少させるために穏やかに選択された部分を狭さくするか、第2および第三段狭さく素子は安静位において維持されるのに適している。そのとき、前記ポンプは運転中でない、そして、前記制御装置は前記刺激デバイスを前記狭さく素子が腸の通路を閉鎖するために選択された部分を狭さくする選択された部分を刺激するために制御する、請求項35に記載の装置。
- 前記安静位は腸の選択された部分の血管の充分な血行を考慮に入れる。そうすると、選択された部分の腸の組織は選択された部分を締めつけている前記狭さく素子にそれらの完全性に続いている長時間曝露を維持する、請求項47に記載の装置。
- 前記狭さくデバイスは、その上流端およびその下流側端部で選択された部分を締めつけて、リリースするための第2の狭さく素子で選択された部分を締めつけて、リリースするための第1の狭さく素子を有し、デバイスが前記第1および第2の狭さく素子を交互に押えて、それぞれに互いに選択された部分をリリースするために制御する前記制御を備えている、請求項21に記載の装置。
- 腸の選択された部分の電気的に刺激的な筋肉または神経組織によって選択された部分の最も少なく部分的な収縮で生じる刺激デバイスから更に成る、請求項49に記載の装置。
- 前記刺激デバイスは、選択された部分の収縮に腸の通路量を減らさせるためにその上流で下流の端との間に選択された部分を電気的に刺激するのに適している、請求項50に記載の装置。
- (i) 選択された部分の上流端で腸の通路を閉鎖するために選択された部分を狭さくする制御前記上流の第1の狭さく素子の制御と、
(ii)選択された部分をリリースする制御前記下流の第2の狭さく素子の制御と、
(iii) 連続してその上流で下流の端間の選択された部分を励まして選択された部分、それで、その腸の内容の漸進性収縮が生じるようにする制御前記刺激デバイスは、ぜん動性の方法の腸の通路において移動させる制御と
を前記制御デバイスが行う、請求項51に記載の装置。 - (i) 選択された部分の下流側端部で腸の通路を閉鎖するために選択された部分を狭さくする制御前記下流の第2の狭さく素子の制御と、
(ii)選択された部分をリリースする制御前記上流の最初の狭さく素子の制御と、
(iii) 前記刺激デバイスを選択された部分に入るために選択された部分の上流で腸の通路の腸の内容を許容するためにその上流で下流の端との間に選択された部分を刺激するのをやめるための制御と
を前記制御デバイスが行う、請求項52に記載の装置。 - (i) 少なくとも選択された部分の上流端で腸の通路の断面積を実質的に減少させるために穏やかに選択された部分を狭さくする前記上流の第1の狭さく素子の制御と、
(ii)前記第1の狭さく素子が選択された部分の収縮に選択された部分の上流端で腸の通路を閉鎖させるために選択された部分を狭さくする選択された部分を刺激する前記刺激デバイスの制御と、
(iii) 選択された部分をリリースする前記下流の第2の狭さく素子の制御と、
(iv)連続してその上流で下流の端間の選択された部分を励まして選択された部分、それで、その腸の内容の漸進性収縮が生じるようにする制御前記刺激デバイスが、ぜん動性の方法の腸の通路において移動させる制御と
を前記制御デバイスが行う、請求項51に記載の装置。 - (i) 少なくとも選択された部分の下流側端部で腸の通路の断面積を実質的に減少させるために穏やかに選択された部分を狭さくする前記下流の第2の狭さく素子の制御と、
(ii)前記第2の狭さく素子が選択された部分の収縮に選択された部分の下流側端部で腸の通路を閉鎖させるために選択された部分を狭さくする選択された部分を刺激する前記刺激デバイスの制御と、
(iii)選択された部分をリリースする制御前記上流の最初の狭さく素子、そして、iv。前記刺激デバイスを選択された部分に入るために選択された部分の上流で腸の通路の腸の内容を許容するためにその上流で下流の端との間に選択された部分を刺激するのをやめる制御と
を前記制御デバイスが行う、請求項54に記載の装置。 - 前記狭さくデバイスは腸の通路を閉鎖するために腸の一連の選択された部分のいかなる部分も狭さくするのに適している、そして、前記制御装置は前記狭さくデバイスを通路においてぜん動性の方法の腸の下流に腸の内容を移動するために連続して選択された部分の直列の選択された部分を狭さくするために制御する、請求項2に記載の装置。
- 前記狭さくデバイスに、連続して選択された部分の直列の選択された部分を狭さくするために腸に沿って移動可能である少なくとも一つの狭さく素子が設けられている、請求項56に記載の装置。
- 前記制御装置は、前記狭さくデバイスを選択された部分の直列の選択された部分に沿って周期的に前記狭さく素子を動かすために制御する、請求項57に記載の装置。
- 前記狭さくデバイスは複数の狭さく素子から成る。そして、それぞれは連続して選択された部分の直列の選択された部分を狭さくするために腸に沿って移動可能である、請求項56に記載の装置。
- 前記制御装置は、前記狭さくデバイスを選択された部分の直列の選択された部分に沿って次々と周期的に前記狭さく素子を動かすために制御する、請求項59に記載の装置。
- 前記狭さくデバイスは、前記狭さく素子を担持しているローターを有し、各狭さく素子が周期的に選択された部分の直列の選択された部分を狭さくするようなものを回転させる前記制御装置制御文字前記ローターを備えている、請求項60に記載の装置。
- 各狭さく素子は、その選択された部分を狭さくするために腸上に転がるためのローラーから成る、請求項61に記載の装置。
- デバイスが電気的に適している前記刺激は、どこで、前記狭さくデバイスおよび前記刺激デバイスを協力するために制御するための制御装置から更に成って、腸の原因収縮に、腸の一連の選択された部分のいかなる部分もの筋組織を刺激するこの種のその腸の内容腸の通路で移動する、請求項12に記載の装置。
- 前記狭さくデバイスは、どこで、少なくとも腸の通路の断面積を実質的に減少させるために選択された部分の直列のいかなる部分も狭さくするのに適している、前記刺激デバイスが、腸の通路を閉鎖するために前記狭さくデバイスによって締めつけられる選択された部分を刺激するのに適している、そして、前記刺激デバイスを選択された部分を刺激するために制御すると共に、前記制御装置は前記狭さくデバイスをぜん動性の方法の腸の通路の腸の内容を移動するために連続して選択された部分の直列の選択された部分を狭さくするために制御する、請求項63に記載の装置。
- 前記制御装置は、前記刺激デバイスを連続して選択された部分を励まして狭さくデバイスによって実行される選択された部分の連続した狭さくと調和してその連続した収縮を引き起こすようにするために制御する、請求項64に記載の装置。
- 前記狭さくデバイスは、連続して選択された部分の直列の選択された部分を狭さくするために腸に沿って移動可能である少なくとも一つの狭さく素子を有し、デバイスが前記狭さく素子に配置されて、電気的パルスを有する腸の組織の選択された部分の筋組織を刺激するのに適している最低1つの電極で成る前記刺激を備えている、請求項64に記載の装置。
- 前記刺激デバイスを前記電極に付勢するために制御すると共に、そこにおいて、前記制御装置は前記狭さくデバイスを選択された部分の直列の選択された部分に沿って周期的に前記狭さく素子を動かすために制御する、請求項66に記載の装置。
- 前記狭さくデバイスには複数の狭さく素子(それぞれは連続して選択された部分の直列の選択された部分を狭さくするために腸に沿って移動可能である)が設けられ、前記刺激デバイスには前記狭さく素子に配置される電極が設けられている、請求項66に記載の装置。
- 前記刺激デバイスを前記電極に付勢するために制御すると共に、そこにおいて、前記制御装置は前記狭さくデバイスを選択された部分の直列の選択された部分に沿って次々と周期的に前記狭さく素子を動かすために制御する、請求項68に記載の装置。
- 前記狭さくデバイスは、前記狭さく素子を担持しているローターを有し、各狭さく素子が周期的に選択された部分の直列の選択された部分を狭さくするようなものを回転させる前記制御装置制御文字前記ローターを備えている、請求項69に記載の装置。
- 各狭さく素子は、その選択された部分を狭さくするために腸上に転がるためのローラーから成る、請求項70に記載の装置。
- 前記複数の電極は前記狭さくデバイスの少なくとも一つの前記狭さく素子に関して表層に沿って配布される。そして、前記狭さく素子が選択された部分のいかなる一つも狭さくするにつれて、前記表層が腸を接触させる、請求項68に記載の装置。
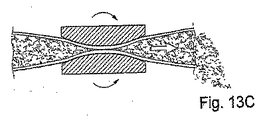
- 前記制御装置は、前記狭さくデバイスを腸の通路の腸の内容を移動するために腸に沿って位置がずれる選択された部分の圧縮を提供するために制御する、請求項2に記載の装置。
- 前記狭さくデバイスに、前記細長い狭さく素子が腸の通路の腸の内容を移動するために次第に選択された部分を狭さくするように、腸に沿って伸びている少なくとも一つの細長い狭さく素子および前記制御装置制御文字前記狭さくデバイスが設けられている、請求項73に記載の装置。
- 前記細長い狭さく素子に、腸の選択された部分の長さを接触させるために寸法取りされる接触面が設けられている、請求項74に記載の装置。
- 前記接触面は凸面である、そして、前記制御装置は前記狭さくデバイスを制御する。そうすると、前記狭さく素子の前記凸面接触面は転がっていって、次第に腸の選択された部分を狭さくする、請求項75に記載の装置。
- 前記狭さくデバイスに、その反対側(そして、前記制御装置制御文字前記狭さくデバイス)で腸に沿って細長い狭さく素子が腸の通路の腸の内容を移動するために次第に選択された部分を狭さくするために各々と協力するようなものを延長している2つの細長い狭さく素子が設けられている、請求項74に記載の装置。
- 前記細長い狭さく素子は、その反対側で腸の選択された部分の長さを接触させるために寸法取りされる接触面から成る、請求項77に記載の装置。
- 前記接触面は凸面である、そして、前記制御装置は前記狭さくデバイスを制御する。そうすると、前記狭さく素子の前記凸面コンタクト表面は転がっていって、次第に腸の選択された部分を狭さくする、請求項78に記載の装置。
- 前記狭さく素子は狭さく状態(前記凸面が走って行って、腸の選択された部分を狭さくすることができる)および解放状態との間に変化するのに適している。そこにおいて、前記凸面は腸の選択された部分から自由にされる、請求項76に記載の装置。
- 電気的に腸の選択された部分の筋肉または神経組織を励まして腸の収縮が生じるようにするための刺激デバイスから更に成って。そこにおいて、前記細長い狭さく素子が次第に選択された部分を狭さくするにつれて、前記制御装置は前記刺激デバイスを選択された部分を刺激するために制御する、請求項74に記載の装置。
- 前記刺激デバイスには、構成される少なくとも一つの電極が設けられて、起電物体を有する腸の選択された部分の筋肉または神経組織が間断化する興奮ように構成されている、請求項81に記載の装置。
- 腸の選択された部分を接触させている前記細長い狭さく元素の表面上に縦に配布される複数の電極から成る、請求項82に記載の装置。
- 前記制御装置は、前記刺激デバイスを腸の選択された部分の漸進性収縮を引き起こすために前記細長い狭さく素子に沿って連続して前記電極に付勢するために制御する、請求項83に記載の装置。
- 前記ポンプが運転中のときに、少なくとも一つの移植可能な解放可能な閉鎖から更に成ることは前記ポンプが運転中でない腸の通路を閉鎖するために腸の選択された部分を係合して、腸の通路を開くために選択された部分をリリースするために適応した、請求項1に記載の装置。
- 前記閉鎖は、どこで近くに通路までの選択された部分を最も少なく部分的に狭窄でに適している前記ポンプが運転中でない腸における請求項85に記載の装置。
- 腸の選択された部分の電気的に刺激的な筋肉または神経組織によって選択された部分の最も少なく部分的な収縮で生じる刺激デバイスから更に成る請求項85に記載の装置。
- 前記閉鎖は、最も少なく実質的に腸(前記ポンプが運転中でない)および前記刺激デバイスの通路の断面積が電気的に腸の筋肉または神経組織を励まして前記閉鎖が腸の通路を閉鎖するために腸を収縮させる腸の短縮に生じさせるようにするのに適している減少で、選択された部分を最も少なく部分的に狭窄でに適している請求項87に記載の装置。
- 制御前記刺激デバイスのための制御装置から成る請求項88に記載の装置。
- 収縮する腸の血管の充分な血行を考慮に入れるために、そこにおいて、前記制御装置は前記閉鎖および前記刺激デバイスを協力するために制御する。そうすると、腸の組織は前記閉鎖にそれらの完全性に続いている長時間曝露を維持する。そのとき、前記ポンプは運転中でない請求項89に記載の装置。
- 前記刺激デバイスに、前記閉鎖と別であるか統合された複数の電極が設けられている請求項88に記載の装置。
- 前記電極は、腸に沿って一連の電極を形成する請求項91に記載の装置。
- 前記複数の電極は、腸を接触させている前記閉鎖の表層に沿って配布される請求項91に記載の装置。
- それが部分的に少なくとも選択された部分を狭さくするように保つ前記狭さくデバイスは安静位において維持されるのに適している、そのとき、前記ポンプは運転中でない請求項1に記載の装置。
- 前記狭さくデバイスは収縮する腸の血管の充分な血行を考慮に入れるだけであるために前記安静位の選択された部分を狭さくする。そうすると、腸の組織は前記狭さくデバイスにそれらの完全性に続いている長時間曝露を維持する請求項94に記載の装置。
- 腸の選択された部分の電気的に刺激的な筋肉または神経組織によって選択された部分の最も少なく部分的な収縮で生じる刺激デバイスから更に成る請求項94に記載の装置。
- 前記狭さくデバイスは少なくとも腸の通路の断面積を実質的に減少させるために腸を収縮させる。そのとき、前記狭さくデバイスは前記安静位においてある、そして、前記刺激デバイスは前記狭さくデバイスが腸の収縮に腸の通路を閉鎖させるために腸を収縮させる腸を電気的に刺激するのに適している請求項96に記載の装置。
- 腸の通路の一部を形成するために患者の腸に外科的に取り付けられて、前記狭さくデバイスによって締めつけられるために少なくとも腸の選択された部分の一部を形成するのに適している人工の腸の部分から更に成る請求項1に記載の装置。
- 前記人工の腸の部分は、その2つの端との間に患者の腸と統合されるのに適している請求項98に記載の装置。
- 前記狭さくデバイスは、人工の腸の部分だけに作用する請求項98に記載の装置。
- 前記狭さくデバイスは、前記人工の腸の部分の下流に位置する腸のストーマによる腸の内容を放出するために、前記人工の腸の部分を狭さくする請求項98に記載の装置。
- 前記人工の腸の部分は、ストーマで端に適している請求項98に記載の装置。
- 前記人工の腸の部分は、直接、または、間接的に患者の肛門に取り付けられるのに適している請求項98に記載の装置。
- ポンプが運転中でないときに、そこにおいて、前記狭さくデバイスは腸の通路を閉鎖するために前記人工の腸の部分を狭さくする請求項98に記載の装置。
- デバイスが放射状に適している前記狭さくは、どこで、そして、軸方向に拡大するものは少なくともチャンバの量を実質的に減らすために選択された部分の中で切断する狭窄に、選択された部分に沿って腸の通路の拡張されたチャンバを形成するために、少なくとも腸の選択された部分の部分を拡大するこの種のその腸の内容腸の通路で移動する請求項1に記載の装置。
- 前記狭さくデバイスは安静位(それが選択された部分の部分を拡大しない)および展開位置との間に調節可能である。そこにおいて、それは選択された部分の部分を拡大する請求項105に記載の装置。
- 前記狭さくデバイスは外部的に前記狭さくデバイスを腸の選択された部分の壁に連結することに線維性組織の成長を見込む材料を備えている。それによって、前記狭さくデバイスは放射状に表面的に選択された部分の壁を引く。そのとき、前記伸縮装置はその展開位置においてある。そして、選択された部分の拡張された部分を形成する請求項106に記載の装置。
- 腸の選択された部分の電気的に刺激的な筋肉または神経組織によって選択された部分の最も少なく部分的な収縮で生じる刺激デバイスから更に成る請求項105に記載の装置。
- 前記刺激デバイスは選択された部分の拡張された部分を電気的に刺激するのに適している。そのとき、前記狭さくデバイスはその展開位置においてある。そして、選択された部分の拡張された部分の軸の収縮を引き起こす請求項108に記載の装置。
- 前記刺激デバイスには、構成される少なくとも一つの電極が設けられて、電気的パルスを有する選択された部分の拡張された部分の興奮の筋肉または神経組織ように構成されている請求項109に記載の装置。
- 前記刺激デバイスに、前記狭さくデバイスと別であるか統合された複数の電極が設けられている請求項110に記載の装置。
- 前記電極は、腸の選択された部分の拡張された部分周辺で伸びている電極の少なくとも一つの直列を形成する請求項111に記載の装置。
- 前記刺激デバイスを時間とともに選択された部分のそれらの位置を変える選択された部分の部分的な収縮を引き起こすために選択された部分の拡張された部分に沿って可変的に前記電極に付勢するために制御するための制御装置から更に成る請求項111に記載の装置。
- 前記ポンプは、手動で手術可能である請求項3または4に記載の装置。
- 有効に皮下に移植可能なアクチュエータから更に成ることは前記ポンプの前記狭さくデバイスにつながった。そこにおいて、前記アクチュエータはオペレーティング前記狭さくデバイスのために手動で作動可能である請求項114に記載の装置。
- 前記狭さくデバイスは油圧で手術可能である、そして、前記アクチュエータは前記油圧で手術可能な狭さくデバイスに油圧で接続している請求項115に記載の装置。
- 前記アクチュエータに、オペレーティング前記狭さくデバイスのために使用する作動油のための手動で圧縮性の強力な貯蔵部が設けられている請求項116に記載の装置。
- 油圧で前記貯蔵部および前記油圧で手術可能な狭さくデバイスを相互接続している後退用サーボ装置から更に成る請求項117に記載の装置。
- 前記貯蔵部は前記狭さくデバイスに油圧で接続している。そうすると、前記貯蔵部が手動で圧縮前記狭さくであるときに、デバイスは通路において腸の下流に選択された部分に含まれる腸の内容を移動するためにその上流で下流の端および前記強力な貯蔵部が手動で発表されて、その圧縮されていない形状を復元する時との間に選択された部分を狭さくする、前記狭さくデバイスは、選択された部分に入るために選択された部分の上流で腸の通路の腸の内容を許容するために、その上流で下流の端との間に、選択された部分をリリースする請求項117に記載の装置。
- 前記狭さくデバイスはその上流で下流の端との間に選択された部分を狭さくするために前記狭さく素子を作動する狭さく素子および油圧蛇腹デバイスから成る。そのとき、前記蛇腹デバイスは拡大される請求項119に記載の装置。
- 前記圧縮性の強力な貯蔵部は前記蛇腹デバイスに油圧で接続している。そうすると、前記貯蔵部が手動で発表されて、その圧縮されていない形状を復元するときに前記貯蔵部が手動で圧縮されて、格納されるときに、前記蛇腹デバイスは拡大される請求項120に記載の装置。
- 前記狭さくデバイスは、その上流端で選択された部分を締めつけて、リリースするための第1の油圧で手術可能なサブデバイス、その下流側端部で選択された部分を締めつけて、リリースするための第2の油圧で手術可能な亜デバイスおよび上流側との間に選択された部分を締めつけて、リリースするための3分の1油圧で手術可能なサブデバイスとその下流側端部とを具備している請求項117に記載の装置。
- 前記貯蔵部は最初に前記ものに連結で、第2で、油圧で第三段サブデバイスである。そうすると、前記貯蔵部が手動で圧縮されるときに、前記上流の第1のサブデバイスは選択された部分の上流端で腸の通路を閉鎖するために選択された部分を狭さくする、前記下流の第2のサブデバイスは選択された部分をリリースする、そして、前記第三段サブデバイスは通路において腸の下流に選択された部分に含まれる腸の内容を移動するためにその上流で下流の端との間に選択された部分を狭さくする請求項122に記載の装置。
- 前記貯蔵部は最初に前記ものに連結で、第2で、油圧で第三段サブデバイスである。そうすると、前記強力な貯蔵部が手動で発表されて、その圧縮されていない形状を復元するときに、前記下流の第2のサブデバイスは選択された部分の下流側端部で腸の通路を閉鎖するために選択された部分を狭さくする、前記上流の第2のサブデバイスは選択された部分をリリースする、そして、前記第三段サブデバイスは選択された部分に入るために選択された部分の上流で腸の通路の腸の内容を許容するためにその上流で下流の端との間に選択された部分をリリースする請求項123に記載の装置。
- 前記狭さくデバイスのそこにおいて、前記第1のサブデバイスには第1の狭さく素子が設けられ、前記第1の蛇腹デバイスが前記狭さくデバイスの拡張された、前記第2の亜デバイスであるときに、上流端で選択された部分を狭さくするために前記第1の狭さく素子を作動する第1の油圧蛇腹デバイスには前記第2の蛇腹デバイスが拡大されるときに、下流側端部で選択された部分をリリースするために前記第2の狭さく素子を作動する第2の狭さく素子および第2の油圧蛇腹デバイス、が設けられているそして、前記狭さくデバイスの前記第三段サブデバイスは前記第三段蛇腹デバイスが拡大されるときに、上流で下流の端との間に選択された部分を狭さくするために前記第三段狭さく素子を作動する3分の1狭さく素子および3分の1油圧蛇腹デバイスから成る。そこにおいて、前記圧縮性の強力な貯蔵部は最初に前記ものに油圧で接続している(第2および第三段蛇腹デバイス)前記貯蔵部が手動で発表されて、その圧縮されていない形状を復元するときに前記貯蔵部が手動で圧縮されて、格納されるときに、この種のその前記蛇腹デバイスは拡大される、請求項122に記載の装置。
- 前記第1の蛇腹デバイスが格納されるときに、そこにおいて、前記第1の蛇腹デバイスは上流端で選択された部分を解放するために前記第1の狭さく素子を作動する、前記第2の蛇腹デバイスが格納されるときに、前記第2の蛇腹デバイスは下流側端部で選択された部分を狭さくするために前記第2の狭さく素子を作動する、そして、前記第三段蛇腹デバイスが格納されるときに、前記第三段蛇腹デバイスは上流で下流の端との間に選択された部分を解放するために前記第三段狭さく素子を作動する請求項125に記載の装置。
- 前記狭さくデバイスは機械的に手術可能である、そして、前記アクチュエータは前記機械的に手術可能な狭さくデバイスに機械的に接続している請求項115に記載の装置。
- 前記ポンプは、駆動する請求項2に記載の装置。
- 前記制御装置に、始まること間で、前記動力ポンプがスイッチ存在が患者の皮下埋め込み術のために適応すると言ったことを止めている手動で手術可能なスイッチが設けられている請求項128に記載の装置。
- 前記制御装置に、制御前記ポンプのための電波式遠隔操作が設けられている請求項128に記載の装置。
- 無線エネルギー送信器から更に成ることは、直接、または、間接的に前記ポンプを駆動するための患者のボディの外側でから無線エネルギーを伝導するために適応した請求項128に記載の装置。
- 送信された無線エネルギーを電気エネルギーに変えるための移植可能なエネルギー-トランスフォーミング・デバイスから更に成る請求項131に記載の装置。
- 前記エネルギー-トランスフォーミング・デバイスが送信された無線エネルギーを電気エネルギーに変えるにつれて、そこにおいて、前記ポンプは電気エネルギーによって直接駆動する請求項132に記載の装置。
- 移植可能なアキュムレータから更に成ることは前記energy-を変えているデバイスによってできる電気エネルギーを格納するために適応した。そこにおいて、前記制御装置は前記アキュムレータを前記ポンプを駆動するためのエネルギーを解放するために制御する請求項132に記載の装置。
- 前記アキュムレータに、コンデンサまたは蓄電池が設けられている請求項134に記載の装置。
- 前記アキュムレータの負担を測定するための移植可能な充電メートルから更に成って。そこにおいて、前記制御装置は、前記充電メートルに応答して表示を生産するのに適している請求項134に記載の装置。
- 移植可能なセンサから更に成ることは直接適合した、または、間接的に、患者の物理パラメータまたは装置の関数パラメタを検出する請求項2に記載の装置。
- 前記制御装置は限界値を上回っている前記物理パラメータの値を検出している前記センサに応答して表示を生産するのに適している。そのとき、前記ポンプは運転中でない請求項137に記載の装置。
- 前記物理パラメータは、腸の選択された部分の腸の内容量である請求項138に記載の装置。
- 前記物理パラメータは、腸壁の膨満または腸の選択された部分の圧力である請求項138に記載の装置。
- 前記表示に、音声信号または示された情報が設けられている請求項138に記載の装置。
- 前記制御装置は限界値を上回っている装置の前記関数パラメタの値を検出している前記センサに応答して表示を生産するのに適している。そのとき、前記ポンプは運転中である請求項137に記載の装置。
- 外部データ・コミュニケータから更に成ることは外部コミュニケータと通信するための患者において移植可能な患者のボディおよび内部データ・コミュニケータの外側にある予定だった。そこにおいて、前記内部データ伝達者は患者に関連したデータを前記外部データ伝達者にフィードバックする、または、前記外部データ伝達者は前記内部データ伝達者にデータを供給する請求項1に記載の装置。
- 患者の腸の通路に関連した障害を有する患者を治療する方法であって、
(i) 少なくとも選択された部分、それで、その腸の内容に沿って腸の通路量を実質的に減らすために患者の腸の選択された部分を狭さくすることで、腸の内容物をその下流の方向に移動させ、
(ii)選択された部分に沿った腸の通路量、それで、選択された部分の上流で腸の通路のその腸の内容を増加させるために選択された部分を解放し、
(iii)ステップ(a)およびステップ(b)を、最適数だけ繰り返す、
ことを備える治療する方法。 - 外科的にストーマおよび実行しているステップ(a)の端に、そして、ストーマによる放電腸の内容に(b)患者の腸を修正することを更に含む請求項144に記載の方法。
- 選択されたものは、ステップ(a)を実行することから更に成っている患者の肛門で、そして、肛門による腸の内容を放出する(b)ために、腸端の中で財産を分与する請求項144に記載の方法。
- ステップ(a)は、初めに選択された部分の上流端で腸の通路を閉鎖するために部分的に選択された部分を締めつけて、そうすると、全ての選択された部分を狭さくすることによって実行される請求項144に記載の方法。
- ステップ(b)は、初めに完全にその下流側端部で選択された部分を以外解放して、それから下流側端部で選択された部分を解放することによって実行される請求項147に記載の方法。
- (i) 少なくとも選択された部分の上流端で腸の通路の断面積を実質的に減少させるために部分的に選択された部分を狭さくし、
(ii)狭さくされれた選択された部分の収縮に選択された部分および上流端で筋肉または神経組織に電気的な刺激的を付与し、
(iii)選択された部分を少なくとも部分的に狭さくし、
(iv)選択された部分を上流側から下流側へと順次に狭さくを施して、腸の内容物を蠕動運動的に移動させる
ことを備える、請求項144に記載の方法。 - ステップ(b)は、初めに完全にその下流側端部で選択された部分を以外解放して、それから下流側端部で選択された部分を解放することによって実行される請求項149に記載の方法。
- (i) 少なくとも選択された部分の上流端で腸の通路の断面積を実質的に減少させるために部分的に選択された部分を狭さくすること、
(ii) 電気的な刺激で、選択された部分の筋肉または神経組織に収縮を生じさせて選択された部分の上流端で腸の通路を閉鎖させ、
(iii) 少なくとも部分的に、全ての選択された部分を締めつけ、
(iv)それから連続して、上流端からその下流側端部までの選択された部分を励まして選択された部分、それで、その腸の内容の漸進性収縮が生じるようにして、蠕動運動的に腸の通路において移動を生じさせる、請求項144に記載の方法。 - ステップ(b)は選択された部分を刺激して、その下流側端部で完全に選択された部分を以外解放するのをやめることによって実行され、下流側端部で選択された部分を解放する、請求項151に記載の方法。
- (i) 少なくとも全ての選択された部分に沿って腸の通路の断面積を実質的に減少させるために部分的に選択された部分を狭さくすること、
(ii)連続して上流端からその下流側端部までの締めつけられた部分を励まして選択された部分、それで、その腸の内容の漸進性収縮が生じるようにして、蠕動運動的に腸の通路において内容物の移動を生じさせる、請求項144に記載の方法。 - ステップ(a)は、連続して腸非常に非常に腸の内容の一連の選択された部分の部分を狭さくすることによって実行される通路においてぜん動性の方法の腸の下流に移動する、請求項144に記載の方法。
- (i) 連続して、各々が部分を少なくとも実質的に狭さくするように、腸の一連の選択された部分の部分を狭さくすることは、腸の通路の断面積を減少させること、
(ii)電気的に各締めつけられた部分を励まして締めつけられた腸の部分の収縮に腸の通路を閉鎖させるようにすること、
を備える、蠕動運動的に腸の通路において内容物の移動を生じさせる、請求項144に記載の方法。 - ステップ(a)は、どこで、次第に選択された部分非常に非常に腸の内容を狭さくすることによって実行される通路においてぜん動性に腸の下流に移動する、請求項144に記載の方法。
- (i) 電気的に選択された部分を励ましてその収縮が生じるようにすること、そして、
(ii) 次第に契約した選択された部分非常に非常に腸の内容を狭さくすることは、腸の通路において内容物を蠕動運動的に下流に移動させる、請求項144に記載の方法。 - (i) 狭さくして、選択された部分を解放するために腸の選択された部分を係合している狭さくデバイスを含んでいるポンプを提供すること、
(ii)ポンプを少なくとも選択された部分に沿って腸の通路量を実質的に減らすために交互に選択された部分を狭さくするために狭さくデバイスを作動して、選択された部分、それで、その腸の内容に沿って腸の通路量を増加させるために選択された部分を解放するために制御し、腸の通路に関連した障害を有する患者を治療する方法。 - 患者の腸を係合している少なくとも一つの解放可能な閉鎖を提供することを更に含んで、少なくとも、ポンプが運転中でない腸の通路を実質的に閉鎖して、ポンプが運転中である腸を解放するために閉鎖を使用する、請求項158に記載の方法。
- 腸の通路を閉鎖するために腸を収縮させるために閉鎖を使用することを更に含む請求項159に記載の方法。
- 少なくとも、閉鎖が腸の通路を閉鎖するために腸を収縮させる腸の原因収縮に腸および電気的に刺激的な筋肉の通路または腸の神経組織の断面積を実質的に減少させるために腸を収縮させるために閉鎖を使用することを更に含む、請求項159に記載の方法。
- 腸の終了および電気刺激法の動作を協力することを更に含んで、収縮する腸の血管の充分な血行を考慮に入れるために、腸の組織が閉鎖にそれらの完全性に続いている長時間曝露を維持するようになし、その際にポンプは運転中でない、請求項161に記載の方法。
- i. 患者のボディの外側でからポンプを制御するのに適している電波式遠隔操作を提供すること、
ii. ポンプを始動するために患者によって電波式遠隔操作を作動して、患者が排出したいときに、そして、患者が排出し終わるときに、ポンプを停止する、
腸の通路に関連した障害を有する患者を治療する、請求項1に記載の装置を使用する方法。 - i. 請求項1に記載の装置を提供すること、
ii. 針のような管を患者身体の腹部に嵌入すること、
iii. 腹部を管によってガスで満たして腹腔を拡大すること、
iv. 患者身体に少なくとも2つの外套針を配置すること、
v. 外套針の1つを通して、腹部へカメラをで嵌入すること、
vi. 患者の腸の一部を選択すること、
vii. 外套針の1つを通して吟味したツールを嵌入すること、
viii.選択された部分にポンプを配置すること、
ix. ポンプを用いて腸の内容物をポンプ輸送すること
を備える、腸の通路に関連した障害を有する患者を治療する方法。 - 患者の皮膚および腹壁による開口をあけて、患者を追い越すことを更に含むことはストーマを作成していて、ストーマの近くで患者の腸の部分を選択している開口による腸である。そこにおいて、ステップ(ix)はストマによる腸の内容を放出することによって実行される請求項164に記載の方法。
- i. 請求項1に記載の装置を提供すること、
ii. 患者の皮膚および腹壁による開口をあけること、
iii.一部の患者の腸を選択すること、
iv. 開口から吟味したツールを嵌入すること、
v. 腸の選択された部分を有する作動的係合の全裂の領域の装置のポンプを配置すること、
vi. 腸の通路による腸の内容をポンプ輸送するためにポンプを使用すること
を備える、腸の通路に関連した障害を有する患者を治療する方法。 - 腸の選択された部分を有する作動的係合のポンプの狭さくデバイスをすることを更に含んで、ポンプを少なくとも選択された部分に沿って腸の通路量を実質的に減らすために交互に選択された部分を狭さくするために狭さくデバイスを作動して、選択された部分、それで、その腸の内容に沿って腸の通路量を増加させるために選択された部分を解放するために制御することは、腸の通路によって位置がずれる、
請求項165または166に記載の方法。 - 腸の選択された部分を有する作動的係合の、そして、ポンプが運転中でない腸の通路を閉鎖して、ポンプが運転中である腸を解放する解放可能な閉鎖を使用して少なくとも一つの解放可能な閉鎖を植設することを更に含む、請求項167に記載の方法。
- 解放可能な閉鎖を操作するための動力早巻き装置を植設することを更に含む、
請求項168に記載の方法。 - 作動装置は、油圧作動装置から成る請求項169に記載の方法。
- 作動装置は、電力を供給される請求項169に記載の方法。
- 作動装置は、電動機から成る請求項171に記載の方法。
- 作動装置に電力を供給するための無線エネルギーを伝導することを更に含んで、必要に応じて腸の通路によるポンプ腸の内容に、腸の選択された部分を解放するために、閉鎖を操作するために送信されたエネルギーを有する作動装置に電力を供給する請求項169に記載の方法。
- 外部のエネルギー源を、無線エネルギーを貯蔵可能なエネルギーに変えて、非侵襲的に植設されたエネルギー源に変わるエネルギーを課している無線エネルギーを解放するために制御して、患者のボディの外側でからの植設されたエネルギー源をポンプおよび/または解放可能な閉鎖の動作との関係ために、エネルギーを解放するために制御してエネルギー源を、外部のエネルギー源を提供して、患者に植設することを更に含む請求項169に記載の方法。
- 外科的に患者を修正することを更に含むことはストーマの端に対する腸である、そして、必要に応じて、患者から腸の内容を外に放出することはボディである。そして、植設されたエネルギー源を一時的に腸の選択された部分を解放するために解放可能な閉鎖を操作して、ストーマによるボディから腸の通路の腸の内容を供給するためにポンプを使用することにエネルギーを供給するために制御する請求項174に記載の方法。
- 無線エネルギーは無線エネルギーとは異なる貯蔵可能なエネルギーに変わる、そして、貯蔵可能なエネルギーがポンプおよび/または解放可能な閉鎖を操作するために使われる請求宇高174に記載の方法。
- 貯蔵可能なエネルギーは、電気エネルギーから成る請求項176に記載の方法。
- 患者のボディの外側で外部のエネルギー源を提供することを更に含んで、患者のボディの外側でからの外部のエネルギー源を無線エネルギーを解放するために制御して、ポンプおよび/または解放可能な閉鎖を操作するための解放された無線エネルギーを使用する請求項168に記載の方法。
- 外部のエネルギー源を直接ポンプおよび/または解放可能な閉鎖を操作している無線エネルギーを解放するために制御することを更に含むこと請求項178に記載の方法。
- 無線エネルギーは、電磁エネルギーから成る請求項179に記載の方法。
- 植設されたエネルギー-トランスフォーミング・デバイスによって患者のボディ内部で無線エネルギーを電気エネルギーに変えて、ポンプおよび/または解放可能な閉鎖の動作と関連して電気エネルギーを使用することを更に含む請求項178に記載の方法。
- 直接電気エネルギーを有するポンプおよび/または解放可能な閉鎖を操作することを更に含んで、エネルギー-トランスフォーミングとして、デバイスは、無線エネルギーを電気エネルギーに変える請求項181に記載の方法。
- 直接ポンプおよび/または解放可能な閉鎖の動作と関連して電気エネルギーを使用することを更に含む請求項181に記載の方法。
- 外部のエネルギー源を非磁性無線エネルギーを解放するために制御して、ポンプおよび/または解放可能な閉鎖を操作するための解放された非磁性無線エネルギーを使用することを更に含む請求項178に記載の方法。
- i. 少なくとも部分的に、腸の内容がそれによって通過するのを防止するために、選択された部分の腸の通路を制限すること、または、
ii. 腸の内容がポンプを用いてそれによってポンプ輸送されることができるために、よりはるかに閉鎖を制御すること
から成る腸を解放する請求項178に記載の方法。 - 解放可能な閉鎖を部分的に選択された部分の腸の通路を制限するために制御することを更に含み、腸の選択された部分を電気的に刺激してその収縮で腸の内容がそれによって通過するのを防止するために更に腸の通路を制限させるようにする請求項185に記載の方法。
- 外部のエネルギー源を電磁石の無線エネルギーを解放するために制御して、ポンプおよび/または解放可能な閉鎖を操作するための解放された電磁石の無線エネルギーを使用することを更に含む請求項178に記載の方法。
- i. 少なくとも部分的に、腸の内容がそれによって通過するのを防止するために、選択された部分の腸の通路を制限すること、または、
ii. 腸の内容がポンプを用いてそれによってポンプ輸送されることができるために、よりはるかに解放可能な閉鎖を制御することから成る腸を解放する請求項187に記載の方法。 - 解放可能な閉鎖を部分的に選択された部分の腸の通路を制限するために制御することを更に含んで、腸の選択された部分を電気的に刺激してその収縮に腸の内容がそれによって通過するのを防止するために更に腸の通路を制限させるようにする請求項187に記載の方法。
- 皮下にポンプを始動して、停止するための手動で手術可能なスイッチを挿入することを更に含む請求項167に記載の方法。
- i. 患者の皮膚および腹壁による開口をあけて、一部の患者の腸をストマを構成する開口に通すこと、
ii.隔膜の貯蔵性血管がiiiを、腸の短い部分に血液供給を確実にするために、腸の短い部分に接続すると共に、ストーマを腸の残存する部分から形成している腸の短い部分を切り離すように、腸を切ること、
iii.腸の短い部分の領域を解剖すること、
iv.全裂の領域の人工の腸の部分を配置して、腸の残存する部分、人工の腸の部分および腸、患者の腸の選択された部分を形成している人工の腸の部分、腸の連続通路を形成するために外科的にそれを腸の短い部分に、そして、腸の残存する部分に取り付けること、
v. 請求項1に記載の装置を提供すること、
vi. 人工の腸の部分に作動的係合の装置のポンプを配置すること、
vii.ストマから腸の内容をポンプ輸送するためにポンプを用いること
を備える、患者の腸の通路に関連した障害を有する患者を治療する方法。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US96076707P | 2007-10-12 | 2007-10-12 | |
| PCT/SE2008/000584 WO2009048393A1 (en) | 2007-10-12 | 2008-10-10 | Apparatus and methods for treating intestinal disorder |
Related Child Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014138504A Division JP6588690B2 (ja) | 2007-10-12 | 2014-07-04 | 腸疾患を治療する装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011500138A true JP2011500138A (ja) | 2011-01-06 |
| JP2011500138A5 JP2011500138A5 (ja) | 2011-12-08 |
Family
ID=40549395
Family Applications (6)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010528835A Pending JP2011500138A (ja) | 2007-10-12 | 2008-10-10 | 腸疾患を治療する装置および方法 |
| JP2014138504A Active JP6588690B2 (ja) | 2007-10-12 | 2014-07-04 | 腸疾患を治療する装置 |
| JP2017218170A Pending JP2018020252A (ja) | 2007-10-12 | 2017-11-13 | 腸疾患を治療する装置および方法 |
| JP2019183496A Active JP6907284B2 (ja) | 2007-10-12 | 2019-10-04 | 腸疾患を治療する治療装置 |
| JP2021108568A Active JP7252276B2 (ja) | 2007-10-12 | 2021-06-30 | 腸疾患を治療する装置 |
| JP2023046318A Pending JP2023075351A (ja) | 2007-10-12 | 2023-03-23 | 腸疾患を治療する装置 |
Family Applications After (5)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2014138504A Active JP6588690B2 (ja) | 2007-10-12 | 2014-07-04 | 腸疾患を治療する装置 |
| JP2017218170A Pending JP2018020252A (ja) | 2007-10-12 | 2017-11-13 | 腸疾患を治療する装置および方法 |
| JP2019183496A Active JP6907284B2 (ja) | 2007-10-12 | 2019-10-04 | 腸疾患を治療する治療装置 |
| JP2021108568A Active JP7252276B2 (ja) | 2007-10-12 | 2021-06-30 | 腸疾患を治療する装置 |
| JP2023046318A Pending JP2023075351A (ja) | 2007-10-12 | 2023-03-23 | 腸疾患を治療する装置 |
Country Status (8)
| Country | Link |
|---|---|
| EP (2) | EP2211769B1 (ja) |
| JP (6) | JP2011500138A (ja) |
| CN (1) | CN101896136B (ja) |
| AU (1) | AU2008311446A1 (ja) |
| BR (2) | BRPI0817873B8 (ja) |
| CA (1) | CA2739850A1 (ja) |
| MX (2) | MX358575B (ja) |
| WO (1) | WO2009048393A1 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019115769A (ja) * | 2013-03-15 | 2019-07-18 | インプランティカ・パテント・リミテッド | 拘束デバイス |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8992409B2 (en) | 2007-10-11 | 2015-03-31 | Peter Forsell | Method for controlling flow in a bodily organ |
| WO2009048379A2 (en) | 2007-10-11 | 2009-04-16 | Milux Holding Sa | Apparatus for controlling flow in a bodily organ |
| EP2349025B1 (en) | 2008-10-10 | 2015-09-16 | Kirk Promotion LTD. | A system, an apparatus, and a method for treating a sexual dysfunctional female patient |
| AU2015230810A1 (en) * | 2010-04-12 | 2015-10-22 | Implantica Patent Ltd. | System for treating a patient having an intestinal disorder |
| CA2795975C (en) * | 2010-04-12 | 2018-04-24 | Milux Holding S.A. | System for treating a patient having an intestinal disorder |
| EP2401985A1 (en) * | 2010-07-02 | 2012-01-04 | MyoPowers Medical Technologies SA | Medical device comprising an artificial contractile structure |
| CN106510894A (zh) * | 2016-10-24 | 2017-03-22 | 温州医科大学附属第医院 | 一种带程控可植入的治疗尿失禁的微电刺激合成吊带 |
| JP7349154B2 (ja) * | 2017-08-18 | 2023-09-22 | イノコン メディカル エーピーエス | 神経の電気刺激のためのシステム |
| WO2023031066A1 (en) * | 2021-08-30 | 2023-03-09 | Implantica Patent Ltd. | Restriction device |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS628752A (ja) * | 1985-07-05 | 1987-01-16 | ハブレイ・メデイカル・テクノロジ−・コ−ポレ−シヨン | 胃腸補綴括約筋 |
| JP2005104722A (ja) * | 2003-07-22 | 2005-04-21 | Toki Corporation Kk | 蠕動運動搬送装置 |
| JP2007135965A (ja) * | 2005-11-21 | 2007-06-07 | Tohoku Univ | 体内留置多機能ステントおよびその製造方法 |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4222377A (en) | 1977-06-27 | 1980-09-16 | American Medical Systems, Inc. | Pressure regulated artificial sphincter systems |
| CA2106100C (en) | 1991-03-13 | 1999-08-17 | Kenneth B. Carter | Prosthetic anal sphincter |
| US6482145B1 (en) * | 2000-02-14 | 2002-11-19 | Obtech Medical Ag | Hydraulic anal incontinence treatment |
| AU777577B2 (en) * | 2000-02-10 | 2004-10-21 | Implantica Patent Ltd. | Anal incontinence treatment with controlled wireless energy supply |
| SE0102313D0 (sv) * | 2001-06-28 | 2001-06-28 | Obtech Medical Ag | Intestine dysfunction treatment apparatus |
| US7037343B2 (en) * | 2002-12-23 | 2006-05-02 | Python, Inc. | Stomach prosthesis |
| US7141071B2 (en) * | 2002-12-23 | 2006-11-28 | Python Medical, Inc. | Implantable digestive tract organ |
| US6752754B1 (en) | 2003-02-04 | 2004-06-22 | Imagine Enterprise, Inc. | Artificial rectum and related method |
| US20040215283A1 (en) * | 2003-04-23 | 2004-10-28 | Antoine Camps | Electrical stimulation of the colon to treat chronic constipation |
| US7835796B2 (en) * | 2005-04-29 | 2010-11-16 | Cyberonics, Inc. | Weight loss method and device |
| SE528738C2 (sv) * | 2005-06-16 | 2007-02-06 | Sinova Safetech Innovation Ab | Tarmimplantat |
| EP1945150A1 (en) * | 2005-10-14 | 2008-07-23 | Continence Control Systems International PTY Ltd. | A method and apparatus for treating fecal incontinence |
| US20070255336A1 (en) * | 2006-04-28 | 2007-11-01 | Medtronic, Inc. | Gastric constriction device with selectable electrode combinations |
| WO2009048379A2 (en) * | 2007-10-11 | 2009-04-16 | Milux Holding Sa | Apparatus for controlling flow in a bodily organ |
-
2008
- 2008-10-10 EP EP08837916.9A patent/EP2211769B1/en active Active
- 2008-10-10 EP EP20160628.2A patent/EP3769718A1/en active Pending
- 2008-10-10 MX MX2010003937A patent/MX358575B/es active IP Right Grant
- 2008-10-10 BR BRPI0817873A patent/BRPI0817873B8/pt active Search and Examination
- 2008-10-10 BR BR122019007027A patent/BR122019007027B8/pt active IP Right Grant
- 2008-10-10 AU AU2008311446A patent/AU2008311446A1/en not_active Abandoned
- 2008-10-10 CA CA2739850A patent/CA2739850A1/en not_active Abandoned
- 2008-10-10 JP JP2010528835A patent/JP2011500138A/ja active Pending
- 2008-10-10 CN CN2008801200120A patent/CN101896136B/zh active Active
- 2008-10-10 WO PCT/SE2008/000584 patent/WO2009048393A1/en active Application Filing
-
2010
- 2010-04-12 MX MX2018010245A patent/MX2018010245A/es unknown
-
2014
- 2014-07-04 JP JP2014138504A patent/JP6588690B2/ja active Active
-
2017
- 2017-11-13 JP JP2017218170A patent/JP2018020252A/ja active Pending
-
2019
- 2019-10-04 JP JP2019183496A patent/JP6907284B2/ja active Active
-
2021
- 2021-06-30 JP JP2021108568A patent/JP7252276B2/ja active Active
-
2023
- 2023-03-23 JP JP2023046318A patent/JP2023075351A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS628752A (ja) * | 1985-07-05 | 1987-01-16 | ハブレイ・メデイカル・テクノロジ−・コ−ポレ−シヨン | 胃腸補綴括約筋 |
| JP2005104722A (ja) * | 2003-07-22 | 2005-04-21 | Toki Corporation Kk | 蠕動運動搬送装置 |
| JP2007135965A (ja) * | 2005-11-21 | 2007-06-07 | Tohoku Univ | 体内留置多機能ステントおよびその製造方法 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019115769A (ja) * | 2013-03-15 | 2019-07-18 | インプランティカ・パテント・リミテッド | 拘束デバイス |
Also Published As
| Publication number | Publication date |
|---|---|
| BRPI0817873B8 (pt) | 2021-06-22 |
| MX358575B (es) | 2018-08-27 |
| MX2010003937A (es) | 2010-07-29 |
| BRPI0817873B1 (pt) | 2019-09-24 |
| JP2023075351A (ja) | 2023-05-30 |
| EP2211769B1 (en) | 2020-03-04 |
| JP6588690B2 (ja) | 2019-10-09 |
| BR122019007027B8 (pt) | 2021-06-22 |
| EP3769718A1 (en) | 2021-01-27 |
| JP2018020252A (ja) | 2018-02-08 |
| EP2211769A1 (en) | 2010-08-04 |
| AU2008311446A1 (en) | 2009-04-16 |
| JP2019217410A (ja) | 2019-12-26 |
| WO2009048393A1 (en) | 2009-04-16 |
| EP2211769A4 (en) | 2016-03-09 |
| JP7252276B2 (ja) | 2023-04-04 |
| JP2021154166A (ja) | 2021-10-07 |
| BR122019007027B1 (pt) | 2020-02-11 |
| BRPI0817873A2 (pt) | 2017-03-28 |
| CN101896136A (zh) | 2010-11-24 |
| MX2018010245A (es) | 2022-11-30 |
| CN101896136B (zh) | 2013-09-18 |
| JP6907284B2 (ja) | 2021-07-21 |
| JP2014223390A (ja) | 2014-12-04 |
| CA2739850A1 (en) | 2009-04-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP7252276B2 (ja) | 腸疾患を治療する装置 | |
| US11590347B2 (en) | System for treating a patient having an intestinal disorder | |
| JP6546242B2 (ja) | 腸疾患を有する患者を治療するシステム | |
| AU2022201121B2 (en) | System For Treating A Patient Having An Intestinal Disorder | |
| AU2020257154B2 (en) | Apparatus and Method for Treating Intestinal Disorder | |
| CN107898532B (zh) | 用于控制身体器官中的流动的设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111011 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20111011 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111018 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121207 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130104 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20130404 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20130411 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130604 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130806 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20140304 |