JP2011232111A - 検査装置及び検査装置の用いた欠陥検出方法 - Google Patents
検査装置及び検査装置の用いた欠陥検出方法 Download PDFInfo
- Publication number
- JP2011232111A JP2011232111A JP2010101475A JP2010101475A JP2011232111A JP 2011232111 A JP2011232111 A JP 2011232111A JP 2010101475 A JP2010101475 A JP 2010101475A JP 2010101475 A JP2010101475 A JP 2010101475A JP 2011232111 A JP2011232111 A JP 2011232111A
- Authority
- JP
- Japan
- Prior art keywords
- image
- subject
- feature
- information indicating
- defect
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000007689 inspection Methods 0.000 title claims description 122
- 238000000034 method Methods 0.000 title description 103
- 230000007547 defect Effects 0.000 claims description 110
- 238000001514 detection method Methods 0.000 claims description 64
- 230000002950 deficient Effects 0.000 claims description 38
- 238000012545 processing Methods 0.000 description 42
- 238000010586 diagram Methods 0.000 description 24
- 238000003384 imaging method Methods 0.000 description 10
- 238000003780 insertion Methods 0.000 description 9
- 230000037431 insertion Effects 0.000 description 9
- 238000012986 modification Methods 0.000 description 9
- 230000004048 modification Effects 0.000 description 9
- 230000002159 abnormal effect Effects 0.000 description 5
- 238000005452 bending Methods 0.000 description 5
- 238000000605 extraction Methods 0.000 description 4
- 235000020061 kirsch Nutrition 0.000 description 4
- 239000000284 extract Substances 0.000 description 3
- 230000003287 optical effect Effects 0.000 description 3
- 230000011218 segmentation Effects 0.000 description 3
- 239000003086 colorant Substances 0.000 description 2
- 238000012360 testing method Methods 0.000 description 2
- 230000005856 abnormality Effects 0.000 description 1
- 238000003708 edge detection Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 239000013307 optical fiber Substances 0.000 description 1
- 230000002093 peripheral effect Effects 0.000 description 1
- 230000003252 repetitive effect Effects 0.000 description 1
- 230000008961 swelling Effects 0.000 description 1
Images



























Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01M—TESTING STATIC OR DYNAMIC BALANCE OF MACHINES OR STRUCTURES; TESTING OF STRUCTURES OR APPARATUS, NOT OTHERWISE PROVIDED FOR
- G01M13/00—Testing of machine parts
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/0002—Inspection of images, e.g. flaw detection
- G06T7/0004—Industrial image inspection
- G06T7/001—Industrial image inspection using an image reference approach
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2200/00—Indexing scheme for image data processing or generation, in general
- G06T2200/24—Indexing scheme for image data processing or generation, in general involving graphical user interfaces [GUIs]
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/10—Image acquisition modality
- G06T2207/10068—Endoscopic image
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30108—Industrial image inspection
- G06T2207/30164—Workpiece; Machine component
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Quality & Reliability (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Theoretical Computer Science (AREA)
- Instruments For Viewing The Inside Of Hollow Bodies (AREA)
- Endoscopes (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Investigating Materials By The Use Of Optical Means Adapted For Particular Applications (AREA)
Abstract
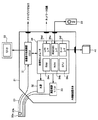
【解決手段】内視鏡装置3は、1の条件に基づいて、画像から複数の被写体のうち少なくとも2つの被写体の第1の特徴部を検出する特徴検出部と、少なくとも2つの被写体の第1の特徴部に基づいて、第1の被写体の第1の特徴部と第2の被写体の第1の特徴部とを判別する特徴判別部と、第1の被写体の第1の特徴部、及び第2の被写体の第1の特徴部に基づいて、第1の被写体の第1の欠陥部、及び第2の被写体の第1の欠陥部を検出する欠陥検出部と、第1の被写体の第1の欠陥部を示す情報、及び第2の被写体の第1の欠陥部を示す情報を、画像と共に表示する表示部とを有する。
【選択図】図2
Description
Y=0.299×R+0.587 ×G+0.114×B ・・・(式1)
(変形例)
Claims (14)
- 複数の被写体を撮像して画像を得る検査装置であって、
第1の条件に基づいて、前記画像から前記複数の被写体のうち少なくとも2つの被写体の第1の特徴部を検出する特徴検出部と、
前記少なくとも2つの被写体の前記第1の特徴部に基づいて、第1の被写体の前記第1の特徴部と第2の被写体の前記第1の特徴部とを判別する特徴判別部と、
前記第1の被写体の前記第1の特徴部、及び前記第2の被写体の前記第1の特徴部に基づいて、前記第1の被写体の第1の欠陥部、及び前記第2の被写体の第1の欠陥部を検出する欠陥検出部と、
前記第1の被写体の第1の欠陥部を示す情報、及び前記第2の被写体の第1の欠陥部を示す情報を、前記画像と共に表示する表示部と、
を有することを特徴とする検査装置。 - 前記特徴検出部は、第2の条件に基づいて、前記画像から前記少なくとも2つの被写体の第2の特徴部を検出し、
前記特徴判別部は、前記少なくとも2つの被写体の前記第2の特徴部に基づいて、前記第1の被写体の前記第2の特徴部と前記第2の被写体の前記第2の特徴部とを判別し、
前記欠陥検出部は、前記第1の被写体の前記第2の特徴部、及び前記第2の被写体の前記第2の特徴部に基づいて、前記第1の被写体の第2の欠陥部、及び前記第2の被写体の第2の欠陥部を検出し、
前記表示部は、前記第1の被写体の第2の欠陥部を示す情報、及び前記第2の被写体の第2の欠陥部を示す情報を、前記画像と共に表示することを特徴とする請求項1に記載の検査装置。 - 前記表示部は、前記第1及び前記第2の被写体の前記第1の欠陥部を示す情報及び前記第1及び前記第2の被写体の前記第2の欠陥部を示す情報を、前記画像と共に表示することを特徴とする請求項2に記載の検査装置。
- 前記第1及び前記第2の被写体の前記第1の欠陥部を示す情報は、前記画像が記録されるファイルとは異なるファイルに記録されることを特徴とする請求項1に記載の検査装置。
- 前記第1及び前記第2の被写体の前記第2の欠陥部を示す情報は、前記画像が記録されるファイルとは異なるファイルに記録されることを特徴とする請求項2に記載の検査装置。
- 前記第1の被写体の前記第1の欠陥部を示す情報と前記第2の被写体の前記第1の欠陥部を示す情報とを、互いに識別可能に表示することを特徴とする請求項1に記載の検査装置。
- 前記第1の被写体の前記第2の欠陥部を示す情報と前記第2の被写体の前記第2の欠陥部を示す情報とを、互いに識別可能に表示することを特徴とする請求項2に記載の検査装置。
- 複数の被写体を撮像して画像を得る検査装置を用いた欠陥検出方法であって、
第1の条件に基づいて、前記画像前記複数の被写体のうち少なくとも2つの被写体の第1の特徴部を検出し、
前記少なくとも2つの被写体の前記第1の特徴部に基づいて、第1の被写体の前記第1の特徴部と第2の被写体の前記第1の特徴部とを判別し、
前記第1の被写体の前記第1の特徴部、及び前記第2の被写体の前記第1の特徴部に基づいて、前記第1の被写体の第1の欠陥部、及び前記第2の被写体の第1の欠陥部を検出し、
前記第1の被写体の第1の欠陥部を示す情報、及び前記第2の被写体の第1の欠陥部を示す情報を、前記画像と共に表示することを特徴とする検査装置を用いた欠陥検出方法。 - 第2の条件に基づいて、前記画像から前記少なくとも2つの被写体の第2の特徴部を検出し、
前記少なくとも2つの被写体の前記第2の特徴部に基づいて、前記第1の被写体の前記第2の特徴部と前記第2の被写体の前記第2の特徴部とを判別し、
前記第1の被写体の前記第2の特徴部、及び前記第2の被写体の前記第2の特徴部に基づいて、前記第1の被写体の第2の欠陥部、及び前記第2の被写体の第2の欠陥部を検出し、
前記第1の被写体の第2の欠陥部を示す情報、及び前記第2の被写体の第2の欠陥部を示す情報を、前記画像と共に表示することを特徴とする請求項8に記載の検査装置を用いた欠陥検出方法。 - 前記第1及び前記第2の被写体の前記第1の欠陥部を示す情報及び前記第1及び前記第2の被写体の前記第2の欠陥部を示す情報を、前記画像と共に表示することを特徴とする請求項9に記載の検査装置を用いた欠陥検出方法。
- 前記第1及び前記第2の被写体の前記第1の欠陥部を示す情報は、前記画像が記録されるファイルとは異なるファイルに記録されることを特徴とする請求項8に記載の検査装置を用いた欠陥検出方法。
- 前記第1及び前記第2の被写体の前記第2の欠陥部を示す情報は、前記画像が記録されるファイルとは異なるファイルに記録されることを特徴とする請求項9に記載の検査装置を用いた欠陥検出方法。
- 前記第1の被写体の前記第1の欠陥部を示す情報と前記第2の被写体の前記第1の欠陥部を示す情報とを、互いに識別可能に表示することを特徴とする請求項8に記載の検査装置を用いた欠陥検出方法。
- 前記第1の被写体の前記第2の欠陥部を示す情報と前記第2の被写体の前記第2の欠陥部を示す情報とを、互いに識別可能に表示することを特徴とする請求項9に記載の検査装置を用いた欠陥検出方法。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010101475A JP2011232111A (ja) | 2010-04-26 | 2010-04-26 | 検査装置及び検査装置の用いた欠陥検出方法 |
| US13/091,291 US20110262026A1 (en) | 2010-04-26 | 2011-04-21 | Inspection apparatus and defect detection method using the same |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2010101475A JP2011232111A (ja) | 2010-04-26 | 2010-04-26 | 検査装置及び検査装置の用いた欠陥検出方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2011232111A true JP2011232111A (ja) | 2011-11-17 |
| JP2011232111A5 JP2011232111A5 (ja) | 2013-06-06 |
Family
ID=44815827
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2010101475A Pending JP2011232111A (ja) | 2010-04-26 | 2010-04-26 | 検査装置及び検査装置の用いた欠陥検出方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US20110262026A1 (ja) |
| JP (1) | JP2011232111A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015513631A (ja) * | 2012-01-31 | 2015-05-14 | シーメンス エナジー インコーポレイテッド | 関節式多軸検査スコープを有する、産業用ガスタービン及び他の発電機械の自動光学検査のためのシステム及び方法 |
| JP2016080702A (ja) * | 2014-10-18 | 2016-05-16 | エムハート・グラス・ソシエテ・アノニム | グラフィックユーザインターフェースを備えたガラス容器検査機 |
| JP2016178553A (ja) * | 2015-03-20 | 2016-10-06 | 株式会社Pfu | 画像処理装置、領域検出方法及びコンピュータプログラム |
| WO2016189764A1 (ja) * | 2015-05-26 | 2016-12-01 | 三菱電機株式会社 | 検出装置および検出方法 |
| WO2017130550A1 (ja) * | 2016-01-29 | 2017-08-03 | 富士フイルム株式会社 | 欠陥検査装置、方法およびプログラム |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8983172B2 (en) | 2012-12-28 | 2015-03-17 | Modern Technology Solutions, Inc. | Visual inspection apparatus, secure one-way data transfer device and methods therefor |
| US9813674B2 (en) * | 2013-03-09 | 2017-11-07 | Olympus Corporation | Photography system and photography method |
| US20140320630A1 (en) * | 2013-04-27 | 2014-10-30 | Mit Automobile Service Company Limited | Device for an automobile fuel intake catalytic system test and its test method |
| JP6355909B2 (ja) * | 2013-10-18 | 2018-07-11 | 三菱重工業株式会社 | 検査記録装置及び検査記録評価方法 |
| US11354881B2 (en) | 2015-07-27 | 2022-06-07 | United Launch Alliance, L.L.C. | System and method to enable the application of optical tracking techniques for generating dynamic quantities of interest with alias protection |
| US10674080B2 (en) * | 2016-07-20 | 2020-06-02 | Sikorsky Aircraft Corporation | Wireless battery-less mini camera and system for interior inspection of closed spaces |
| US11276159B1 (en) * | 2018-05-15 | 2022-03-15 | United Launch Alliance, L.L.C. | System and method for rocket engine health monitoring using digital image correlation (DIC) |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2748977B2 (ja) * | 1988-09-12 | 1998-05-13 | オムロン株式会社 | 基板検査結果表示装置 |
| JP2002267428A (ja) * | 2001-03-14 | 2002-09-18 | Nec Corp | ランド外観検査装置およびランド外観検査方法 |
| JP2004037222A (ja) * | 2002-07-03 | 2004-02-05 | Matsushita Electric Ind Co Ltd | ティーチング方法、電子基板検査方法、および電子基板検査装置 |
| JP2005055756A (ja) * | 2003-08-06 | 2005-03-03 | Olympus Corp | 内視鏡装置 |
| JP2005291760A (ja) * | 2004-03-31 | 2005-10-20 | Anritsu Corp | プリント基板検査装置 |
| JP2007163723A (ja) * | 2005-12-13 | 2007-06-28 | Olympus Corp | 内視鏡装置 |
| JP2009168774A (ja) * | 2008-01-21 | 2009-07-30 | Olympus Corp | 画像処理装置およびプログラム |
| JP2011232110A (ja) * | 2010-04-26 | 2011-11-17 | Olympus Corp | 検査装置及び検査装置を用いた欠陥検出方法 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5426506A (en) * | 1993-03-22 | 1995-06-20 | The University Of Chicago | Optical method and apparatus for detection of surface and near-subsurface defects in dense ceramics |
| US20040183900A1 (en) * | 2003-03-20 | 2004-09-23 | Everest Vit | Method and system for automatically detecting defects in remote video inspection applications |
| US7489811B2 (en) * | 2004-10-08 | 2009-02-10 | Siemens Energy, Inc. | Method of visually inspecting turbine blades and optical inspection system therefor |
| US7689003B2 (en) * | 2006-03-20 | 2010-03-30 | Siemens Energy, Inc. | Combined 2D and 3D nondestructive examination |
| US7995829B2 (en) * | 2007-08-01 | 2011-08-09 | General Electric Company | Method and apparatus for inspecting components |
-
2010
- 2010-04-26 JP JP2010101475A patent/JP2011232111A/ja active Pending
-
2011
- 2011-04-21 US US13/091,291 patent/US20110262026A1/en not_active Abandoned
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2748977B2 (ja) * | 1988-09-12 | 1998-05-13 | オムロン株式会社 | 基板検査結果表示装置 |
| JP2002267428A (ja) * | 2001-03-14 | 2002-09-18 | Nec Corp | ランド外観検査装置およびランド外観検査方法 |
| JP2004037222A (ja) * | 2002-07-03 | 2004-02-05 | Matsushita Electric Ind Co Ltd | ティーチング方法、電子基板検査方法、および電子基板検査装置 |
| JP2005055756A (ja) * | 2003-08-06 | 2005-03-03 | Olympus Corp | 内視鏡装置 |
| JP2005291760A (ja) * | 2004-03-31 | 2005-10-20 | Anritsu Corp | プリント基板検査装置 |
| JP2007163723A (ja) * | 2005-12-13 | 2007-06-28 | Olympus Corp | 内視鏡装置 |
| JP2009168774A (ja) * | 2008-01-21 | 2009-07-30 | Olympus Corp | 画像処理装置およびプログラム |
| JP2011232110A (ja) * | 2010-04-26 | 2011-11-17 | Olympus Corp | 検査装置及び検査装置を用いた欠陥検出方法 |
Cited By (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2015513631A (ja) * | 2012-01-31 | 2015-05-14 | シーメンス エナジー インコーポレイテッド | 関節式多軸検査スコープを有する、産業用ガスタービン及び他の発電機械の自動光学検査のためのシステム及び方法 |
| JP2016080702A (ja) * | 2014-10-18 | 2016-05-16 | エムハート・グラス・ソシエテ・アノニム | グラフィックユーザインターフェースを備えたガラス容器検査機 |
| JP2016178553A (ja) * | 2015-03-20 | 2016-10-06 | 株式会社Pfu | 画像処理装置、領域検出方法及びコンピュータプログラム |
| WO2016189764A1 (ja) * | 2015-05-26 | 2016-12-01 | 三菱電機株式会社 | 検出装置および検出方法 |
| JPWO2016189764A1 (ja) * | 2015-05-26 | 2017-08-31 | 三菱電機株式会社 | 検出装置および検出方法 |
| US10620131B2 (en) | 2015-05-26 | 2020-04-14 | Mitsubishi Electric Corporation | Detection apparatus and detection method |
| WO2017130550A1 (ja) * | 2016-01-29 | 2017-08-03 | 富士フイルム株式会社 | 欠陥検査装置、方法およびプログラム |
| JPWO2017130550A1 (ja) * | 2016-01-29 | 2018-11-08 | 富士フイルム株式会社 | 欠陥検査装置、方法およびプログラム |
| US11156567B2 (en) | 2016-01-29 | 2021-10-26 | Fujifilm Corporation | Defect inspection apparatus, method, and program |
Also Published As
| Publication number | Publication date |
|---|---|
| US20110262026A1 (en) | 2011-10-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2011232111A (ja) | 検査装置及び検査装置の用いた欠陥検出方法 | |
| US8965103B2 (en) | Image processing apparatus and image processing method | |
| US8791998B2 (en) | Image processing apparatus and method for displaying images | |
| US8675950B2 (en) | Image processing apparatus and image processing method | |
| JP6809250B2 (ja) | 情報処理装置、情報処理方法およびプログラム | |
| JP5244404B2 (ja) | 画像処理装置およびプログラム | |
| JP2011232110A (ja) | 検査装置及び検査装置を用いた欠陥検出方法 | |
| BR112013013113B1 (pt) | Método para determinar uma configuração adequada para um filtro para pré-processar imagens de vídeo capturadas antes de executar ocr e sistema de teste para analisar um quadro de vídeo capturado de um dispositivo sob teste | |
| CN107211112A (zh) | 图像处理设备、图像处理系统、图像处理方法和程序 | |
| JP4974599B2 (ja) | 顕微鏡用カラー撮像装置、顕微鏡用カラー撮像プログラムおよび顕微鏡用カラー撮像方法 | |
| WO2020039606A1 (ja) | ガス検出装置、情報処理装置およびプログラム | |
| JPWO2019216084A1 (ja) | 検査動画処理装置、検査動画処理方法及び検査動画処理プログラム | |
| JP6822093B2 (ja) | 画像処理装置、画像処理システム、画像処理方法、及び画像処理プログラム | |
| JP2013121097A (ja) | 撮像装置及び方法、並びに画像生成装置及び方法、プログラム | |
| JP2007184723A (ja) | 検査システム及び検査方法 | |
| JP4498203B2 (ja) | メータ認識システム、メータ認識方法、およびメータ認識プログラム | |
| JP2023107399A (ja) | 内視鏡システム及びその作動方法 | |
| JP5519202B2 (ja) | 画像処理装置およびプログラム | |
| JP5385048B2 (ja) | 画像処理装置およびプログラム | |
| JP7684198B2 (ja) | 外観検査装置及び外観検査方法 | |
| CN118468915B (zh) | 生产信息追溯方法、装置、计算机设备及存储介质 | |
| WO2024190552A1 (ja) | 情報処理装置、情報処理方法およびプログラム | |
| JP2005168804A (ja) | プロセッサ、電子内視鏡装置 | |
| CN116803325A (zh) | 医疗图像处理系统及其工作方法 | |
| JP2007140703A (ja) | 保険証読取方法、そのシステム及び保険証認識装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130419 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130419 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20131219 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140513 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20141014 |