JP2011227074A - 磁場測定値補償方法および装置、物体位置特定方法およびシステム、ならびに、これらの方法の情報記録媒体 - Google Patents
磁場測定値補償方法および装置、物体位置特定方法およびシステム、ならびに、これらの方法の情報記録媒体 Download PDFInfo
- Publication number
- JP2011227074A JP2011227074A JP2011088713A JP2011088713A JP2011227074A JP 2011227074 A JP2011227074 A JP 2011227074A JP 2011088713 A JP2011088713 A JP 2011088713A JP 2011088713 A JP2011088713 A JP 2011088713A JP 2011227074 A JP2011227074 A JP 2011227074A
- Authority
- JP
- Japan
- Prior art keywords
- magnetic field
- magnetic
- disturbance
- measured
- sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images
Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/02—Measuring direction or magnitude of magnetic fields or magnetic flux
- G01R33/025—Compensating stray fields
Landscapes
- Physics & Mathematics (AREA)
- Condensed Matter Physics & Semiconductors (AREA)
- General Physics & Mathematics (AREA)
- Measuring Magnetic Variables (AREA)
- Measurement Of Length, Angles, Or The Like Using Electric Or Magnetic Means (AREA)
- Measurement And Recording Of Electrical Phenomena And Electrical Characteristics Of The Living Body (AREA)
Abstract
【課題】磁気外乱物の存在に対して簡易に補償する。
【解決手段】この磁場測定値補償方法は、磁気外乱物の反対側に配置される磁場発生源の像の位置および磁気モーメントを、前記磁場発生源に対する位置および方向が既知である少なくとも1つの磁気センサにより測定される発生された磁場の1つ以上の測定値を用いて決定するステップ(64)と、前記測定値を補償するため、前記磁気外乱物が存在する場合に、前記磁気センサにより測定される磁場の測定値から前記像により発生される磁場を差し引くステップと(74)を備えている。
【選択図】図4
【解決手段】この磁場測定値補償方法は、磁気外乱物の反対側に配置される磁場発生源の像の位置および磁気モーメントを、前記磁場発生源に対する位置および方向が既知である少なくとも1つの磁気センサにより測定される発生された磁場の1つ以上の測定値を用いて決定するステップ(64)と、前記測定値を補償するため、前記磁気外乱物が存在する場合に、前記磁気センサにより測定される磁場の測定値から前記像により発生される磁場を差し引くステップと(74)を備えている。
【選択図】図4
Description
本発明は、磁場測定値補償方法および装置に関する。また、本発明は、物体位置特定方法およびシステム、ならびに、これらの方法を実行する情報記録媒体に関する。
本出願人は、磁気外乱物が存在する場合において、磁気外乱物の片側に配置され、磁気モーメントが既知である単軸磁場発生源による磁場の発生を含む磁場測定値補償方法について精通している。
磁気外乱物とは、近接して発生する磁場の磁力線を弱めるか、または、変形させる任意の物体のことである。磁気外乱物は、例えば、導電体である。この場合、磁力線の低減は、導電体におけるうず電流の発生によって生じる。導電体は、例えば、金属体である。また、磁気外乱物は、常磁性体または強磁性体のような磁性体であることがである。磁気外乱物は、比透磁率が1でない場合、磁性体と見なされる。
磁場の測定値の補償は、磁気外乱物が存在しない場合に得られる測定値に近づけるように、この測定値を補正することにより行われる。
単軸磁場発生源は、1つの軸に沿ってのみ磁場を発生する磁場発生源であることが望ましい。例えば、同一の軸の回りに巻線が巻かれたコイルは、単軸磁場発生源であり、磁場発生軸は、巻線の巻回軸と一致していることが望ましい。
3軸磁場発生源は、互いに一直線上にない3つの磁場発生軸に沿って磁場を発生する。例えば、このような磁場発生源または磁場放射源は、各磁場発生軸にそれぞれが整列された、複数の単軸磁場発生源から構成されている。
同様に、少なくとも1つの3軸磁場発生源は、一直線上にない3つ以上の軸に沿って磁場を発生する磁場発生源である。
また、3軸磁場センサは、磁場の方向を測定可能なセンサである。一般的には、これらのセンサは、測定値の3つの互いに一直線上にない軸における磁場の射影振幅を測定する。このように、これらのセンサは、磁場の方向を測定し、また、通常は、この磁場の振幅をも測定するために用いることができる。
磁場の測定値の補償方法は、特に、磁気システムによる物体の位置を特定するための方法に対して用いられる。実際、物体の位置を特定するために用いられる測定磁場が乱されると、物体の位置の特定を誤ってしまう。このことは、特に、人体内にプローブまたはカテーテルを設置する医学に利用した場合、有害な結果をもたらす。このような応用のためには、プローブの位置の特定について、信頼できることが非常に重要である。今日、医学において、位置の特定の誤りを逃れることのできない多数の磁気外乱物がある。例えば、磁気外乱物は、手術台、患者の近くに配置された他の器具の金属フレーム等である。
磁場の乱された測定値を補償する複数の方法が、既に提案されている。これらの方法は、複雑な計算または環境の較正を用いている。
本発明は、磁気外乱物の存在に対して簡易に補償することにより、この問題を克服しようとするものである。
従って、本発明の目的は、磁場の測定値を補償する方法において、
磁気外乱物の反対側に配置される磁場発生源の像の位置および磁気モーメントを、前記磁場発生源に対する位置、および方向が既知である少なくとも1つの磁気センサにより測定される発生された磁場の1つ以上の測定値を用いて、前記各磁気センサに対する以下の関係式を最小にする前記像の位置および磁気モーメントとして決定するステップと、

・ベクトルBmeは、前記磁気外乱物が存在する場合において、前記磁気センサにより測定される磁場、
・ベクトルBSは、前記磁気外乱物が存在しない場合において、前記磁気センサにより測定される磁場、
・ベクトルBIは、前記磁気外乱物が存在しない場合において、前記磁気センサにより測定される前記像から発生される仮想磁場、
前記測定値を補償するため、前記磁気外乱物が存在する場合に、前記磁気センサにより測定される磁場の測定値から、前記像により発生される磁場を差し引くステップ
とを備えることを特徴としている。
磁気外乱物の反対側に配置される磁場発生源の像の位置および磁気モーメントを、前記磁場発生源に対する位置、および方向が既知である少なくとも1つの磁気センサにより測定される発生された磁場の1つ以上の測定値を用いて、前記各磁気センサに対する以下の関係式を最小にする前記像の位置および磁気モーメントとして決定するステップと、
・ベクトルBSは、前記磁気外乱物が存在しない場合において、前記磁気センサにより測定される磁場、
・ベクトルBIは、前記磁気外乱物が存在しない場合において、前記磁気センサにより測定される前記像から発生される仮想磁場、
前記測定値を補償するため、前記磁気外乱物が存在する場合に、前記磁気センサにより測定される磁場の測定値から、前記像により発生される磁場を差し引くステップ
とを備えることを特徴としている。
上記の方法は、前記磁気外乱物に対する前記磁場発生源の像により発生される磁場としての前記磁気外乱物による磁場の外乱をモデル化する。測定された磁場から、前記磁場発生源の像より発生される磁場を差し引くだけで十分であるため、前記磁場発生源により発生される磁場のいずれの測定値の補償も、非常に簡単である。さらに、離れた場所では、前記磁場発生源の像は、磁場の方程式が公知であり、数学的に複雑ではない磁気双極子と見なされる。従って、この方法は、特に簡単に実行および利用することができる。
さらに、この方法は、前記磁気外乱物により乱されるいかなる数の測定軸にも対応している。従って、他の方法とは異なり、少なくとも1つの測定軸に沿う少なくとも1つの乱されない測定値が存在することを必要としない。
結局、この方法は、前記磁気外乱物のいかなる特性にも対応する。すなわち、前記磁気外乱物は、導電体、磁性体またはその両方とすることができる。
この補償方法の実施形態は、次の特徴の1つ以上を備えている。
前記像の位置、および磁気モーメントを決定するステップでは、電磁気学の像理論から導かれる以下の組から選択される少なくとも1つの補助関係式が用いられる。
・MiおよびMSは、前記像および前記磁場発生源の磁気モーメント、
・σおよびμrは、前記磁気外乱物の導電率および比透磁率、
・前記磁場発生源と前記磁気外乱物の間の最短距離が、前記磁場発生源の前記像と前記磁気外乱物の間の最短距離に等しく、
・前記磁気外乱物の一方の面に交差する磁場の垂直成分が、前記面の両側で保持される。
−前記方法は、
・前記磁場発生源に対する位置および方向が既知である1つまたは複数の前記磁気センサにより測定され、前記磁場発生源により発生される磁場に対する直交位相の磁場の測定値のみから、前記磁場発生源の位置および磁気モーメントを決定するステップと、
・前記磁場発生源に対する位置および方向が既知である1つまたは複数の前記磁気センサにより測定され、前記磁場発生源により発生される磁場における同相の磁場の測定値のみから、前記磁場発生源の位置および磁気モーメントを決定するステップ
とを備える。
本発明の方法は、前記磁場発生源に対する位置、および方向が既知である1つまたは複数の前記磁気センサにより測定され、前記磁場発生源により発生される磁場に対する同相および直交位相の磁場の測定値から、磁場の有効係数を計算するステップと、磁場の前記有効係数から、前記磁場発生源の少なくとも1つの像の位置、および磁気モーメントを決定するステップとを備えている。
この方法は、
・位置および方向が前記磁場発生源に対して既知である複数の前記磁気センサにより測定される磁場の同じ測定値から、同じ前記磁場発生源の複数の像の位置、および磁気モーメントを決定するステップと、
・前記測定値を補償するため、前記磁気外乱物が存在する場合において、1つの前記センサにより測定される磁場の測定値から、複数の前記像より発生される磁場を差し引くステップとを備えている。
前記磁場発生源の各像は、磁気双極子としてモデル化される。
前記像の位置、および磁気モーメントを決定するステップでは、電磁気学の像理論から導かれる以下の組から選択される少なくとも1つの補助関係式が用いられる。
・σおよびμrは、前記磁気外乱物の導電率および比透磁率、
・前記磁場発生源と前記磁気外乱物の間の最短距離が、前記磁場発生源の前記像と前記磁気外乱物の間の最短距離に等しく、
・前記磁気外乱物の一方の面に交差する磁場の垂直成分が、前記面の両側で保持される。
−前記方法は、
・前記磁場発生源に対する位置および方向が既知である1つまたは複数の前記磁気センサにより測定され、前記磁場発生源により発生される磁場に対する直交位相の磁場の測定値のみから、前記磁場発生源の位置および磁気モーメントを決定するステップと、
・前記磁場発生源に対する位置および方向が既知である1つまたは複数の前記磁気センサにより測定され、前記磁場発生源により発生される磁場における同相の磁場の測定値のみから、前記磁場発生源の位置および磁気モーメントを決定するステップ
とを備える。
本発明の方法は、前記磁場発生源に対する位置、および方向が既知である1つまたは複数の前記磁気センサにより測定され、前記磁場発生源により発生される磁場に対する同相および直交位相の磁場の測定値から、磁場の有効係数を計算するステップと、磁場の前記有効係数から、前記磁場発生源の少なくとも1つの像の位置、および磁気モーメントを決定するステップとを備えている。
この方法は、
・位置および方向が前記磁場発生源に対して既知である複数の前記磁気センサにより測定される磁場の同じ測定値から、同じ前記磁場発生源の複数の像の位置、および磁気モーメントを決定するステップと、
・前記測定値を補償するため、前記磁気外乱物が存在する場合において、1つの前記センサにより測定される磁場の測定値から、複数の前記像より発生される磁場を差し引くステップとを備えている。
前記磁場発生源の各像は、磁気双極子としてモデル化される。
さらに、補償方法の実施形態は、次の利点を有する。
電磁気学の像理論から導かれる補助関係式を用いることにより、前記磁場発生源の前記像の位置、および磁気モーメントを決定するのに必要とされる前記磁気センサの数を制限するか、または、磁気センサを簡単にする。
同相および直交位相の測定値からなる2つの前記像を用いることにより、これらの測定値が、導電性および透過性を有する前記磁気外乱物による乱される場合に、磁場の測定値の補償を改善する。
また、磁場の有効係数を用いることにより、これらの測定値が、導電性および透過性を有する前記磁気外乱物により乱される場合に、磁場の測定値の補償を改善する。
前記磁場発生源の複数の前記像を用いることにより、前記磁気外乱物が、電磁気学の像理論を利用可能な理論的条件からずれている場合に、磁場の測定値の補償を改善する。
前記磁場発生源の前記像を磁気双極子としてモデル化することにより、計算が簡単になる。
電磁気学の像理論から導かれる補助関係式を用いることにより、前記磁場発生源の前記像の位置、および磁気モーメントを決定するのに必要とされる前記磁気センサの数を制限するか、または、磁気センサを簡単にする。
同相および直交位相の測定値からなる2つの前記像を用いることにより、これらの測定値が、導電性および透過性を有する前記磁気外乱物による乱される場合に、磁場の測定値の補償を改善する。
また、磁場の有効係数を用いることにより、これらの測定値が、導電性および透過性を有する前記磁気外乱物により乱される場合に、磁場の測定値の補償を改善する。
前記磁場発生源の複数の前記像を用いることにより、前記磁気外乱物が、電磁気学の像理論を利用可能な理論的条件からずれている場合に、磁場の測定値の補償を改善する。
前記磁場発生源の前記像を磁気双極子としてモデル化することにより、計算が簡単になる。
また、本発明による物体の位置を特定する方法は、
磁気外乱物が存在する場合に、前記磁気外乱物の一方側に配置される磁気モーメントが既知である単軸磁場発生源により、磁場を発生させるステップと、
前記物体に固定される自由度のない磁気センサにより、発生される磁場を測定するステップと、
前記磁気センサの測定値により、前記単軸磁場発生源に対する前記物体の位置を特定するステップと、
前記位置の特定により、上記の補償方法により前記磁気センサの測定値を補償するステップとを備えている。
磁気外乱物が存在する場合に、前記磁気外乱物の一方側に配置される磁気モーメントが既知である単軸磁場発生源により、磁場を発生させるステップと、
前記物体に固定される自由度のない磁気センサにより、発生される磁場を測定するステップと、
前記磁気センサの測定値により、前記単軸磁場発生源に対する前記物体の位置を特定するステップと、
前記位置の特定により、上記の補償方法により前記磁気センサの測定値を補償するステップとを備えている。
この位置の特定方法の実施形態では、前記磁場発生源、およびその1つまたは複数の像が配置されている前記磁気センサからの距離を決定するステップを備えている。
また、本発明は、上記の方法の1つを実行するための命令を有し、これらの命令が、電子コンピュータにより実行される情報記録媒体にも関する。
また、本発明による磁場の測定値を補償する装置は、
磁気外乱物が存在する場合に、前記磁気外乱物の一方側に配置され、磁気モーメントが既知である磁場を発生可能な単軸磁場発生源と、
前記単軸磁場発生源に対する位置および磁気モーメントが既知である少なくとも1つの磁気センサと、
前記磁気外乱物の他方側に配置される前記単軸磁場発生源の像の位置および磁気モーメントを、1つまたは複数の磁気センサにより測定される前記単軸磁場発生源から発生された磁場の1つ以上の測定値を用いて、前記各磁気センサに対する以下の関係式を最小にする前記像の位置および磁気モーメントとして決定し、
・ベクトルBmeは、前記磁気外乱物が存在する場合において、前記磁気センサにより測定される磁場、
・ベクトルBSは、前記磁気外乱物が存在しない場合において、前記磁気センサにより測定される磁場、
・ベクトルBIは、前記磁気外乱物が存在しない場合において、前記磁気センサにより測定される前記像から発生される仮想磁場、
前記測定値を補償するため、前記磁気センサにより測定される磁場の測定値から、前記像により発生される磁場を差し引くことの可能な補償器とを備えている。
磁気外乱物が存在する場合に、前記磁気外乱物の一方側に配置され、磁気モーメントが既知である磁場を発生可能な単軸磁場発生源と、
前記単軸磁場発生源に対する位置および磁気モーメントが既知である少なくとも1つの磁気センサと、
前記磁気外乱物の他方側に配置される前記単軸磁場発生源の像の位置および磁気モーメントを、1つまたは複数の磁気センサにより測定される前記単軸磁場発生源から発生された磁場の1つ以上の測定値を用いて、前記各磁気センサに対する以下の関係式を最小にする前記像の位置および磁気モーメントとして決定し、
・ベクトルBSは、前記磁気外乱物が存在しない場合において、前記磁気センサにより測定される磁場、
・ベクトルBIは、前記磁気外乱物が存在しない場合において、前記磁気センサにより測定される前記像から発生される仮想磁場、
前記測定値を補償するため、前記磁気センサにより測定される磁場の測定値から、前記像により発生される磁場を差し引くことの可能な補償器とを備えている。
また、本発明の最後の目的は、物体の位置を特定するシステムにおいて、
磁気外乱物が存在する場合に、前記磁気外乱物の一方側に配置され、磁気モーメントが既知である磁場を発生可能な少なくとも1つの単軸磁場発生源と、
配置されている物体に自由度のない状態で固定され、前記単軸磁場発生源により発生される磁場を検出する少なくとも1つの磁気センサと、
前記磁気センサによる測定値から、前記単軸磁場発生源に対する前記磁気センサの位置を特定するためのモジュールと、
位置特定するための前記モジュールで用いられる測定値を補償する上記装置とを備えている。
磁気外乱物が存在する場合に、前記磁気外乱物の一方側に配置され、磁気モーメントが既知である磁場を発生可能な少なくとも1つの単軸磁場発生源と、
配置されている物体に自由度のない状態で固定され、前記単軸磁場発生源により発生される磁場を検出する少なくとも1つの磁気センサと、
前記磁気センサによる測定値から、前記単軸磁場発生源に対する前記磁気センサの位置を特定するためのモジュールと、
位置特定するための前記モジュールで用いられる測定値を補償する上記装置とを備えている。
図面を参照して以下に示す限定されない実施形態から、本発明をより明瞭に理解しうると思う。
物体の位置を特定するための第1実施形態のシステムの概略図である。
図1のシステムで用いられる単軸磁場発生源の概略図である。
図1のシステムで用いられる3軸磁場発生源の概略図である。
物体の位置を特定し、乱された測定値を補償するためのフローチャートである。
物体の位置を特定するための第2実施形態のシステムの概略図である。
物体の位置を特定するための第3実施形態のシステムの概略図である。
物体の位置を特定するための第4実施形態のシステムの概略図である。
これらの図面において、同一の要素には、同一の符号を付してある。
以下の説明において、当業者に周知の特徴および機能については、詳細に説明しない。
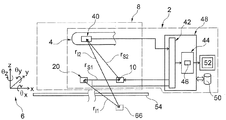
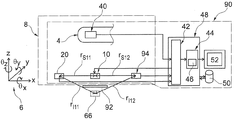
図1は、基準座標系6における物体4の位置を特定するためのシステム2を示す。物体4は、例えば、人体8内に導入されるプローブまたはカテーテルである。物体4は、基準座標系6における移動体である。
基準座標系6は、3つの直交軸X、Y、Zを有する固定基準座標系である。
基準座標系6における物体4の位置を特定することは、そのx、y、zの位置と、θx、θy、θzの方向とを見つけることである。角度θx、θy、θzは、軸X、Y、Zのそれぞれに対する物体4の方向を示す。
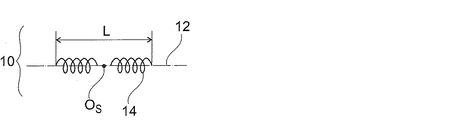
システム2は、磁場発生源10を備えている。基準座標系6における磁場発生源10の位置は既知である。例えば、磁場発生源10は、この基準座標系6に固定される。この場合、磁場発生源10は、Z軸に平行な軸12(図2)に沿って磁場を発生させる単軸磁場発生源である。例えば、磁場発生源10は、軸12の回りに巻回された単コイル14(図2)からなっている。この単コイル14は、巻回軸上の点OSの両側に対称に分離される2つの同一の巻線グループに分割されている。各巻線グループは、巻回軸に沿って同一の向きに巻かれている。従って、この磁場発生源10の最大寸法Lは、単コイル14の長さと等しい。例えば、寸法Lは、15mmである。
磁場発生源10から、長さ2Lよりも遠く、好ましくは長さ3Lまたは4Lよりも遠く離れた地点において、磁場発生源10により生成される磁場は、点OSと一致する磁場点源により発生されたものと見なすことができる。点OSは、磁場発生源10の中心である。
また、システム2は、磁場発生源10に対する位置が既知であるセンサ20を備えている。例えば、センサ20の位置は、固定されている。一般的には、この目的のため、磁場発生源10およびセンサ20は、同一の剛体の基板に固定されて連結されている。
磁場発生源10とセンサ20との距離は、センサ20の地点において、磁場発生源10により発生される磁場が、双極子磁場発生源によって発生されるものと見なすことができるように、距離2Lよりも遠く、好ましくは距離3Lまたは4Lよりも遠い。
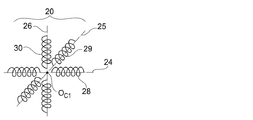
センサ20は、例えば、図3においてより詳細に示す3軸センサである。このセンサ20は、3つの同一線上にない測定軸24〜26に沿って受ける磁場を測定する。この場合、これらの測定軸24〜26は、互いに直交している。この目的を達成するため、センサ20には、例えば、3つの単軸変換器28〜30が組み込まれている。これらの各変換器28〜30は、磁場に対する感度が最大となる測定方向を有する。この場合、変換器28〜30の測定方向は、測定軸24〜26とそれぞれ一致している。
例えば、変換器28〜30は、測定軸24〜26の回りにそれぞれ巻回されたコイルである。
図示するように、図2を参照した説明と同様にして、各変換器28〜30は、測定軸24〜26の交点に対応する点OC1の両側に対称に分離される2つの同一の巻線グループに分割されている。従って、センサ20によって測定される磁場は、点OC1に存在する磁場である。点OC1は、センサ20の中心である。
また、システム2は、物体4に固定される自由度のない他の磁場センサ40を備えている。このセンサ40は、例えば、測定軸が物体4に連結される3軸センサである。このセンサ40は、センサ20と同一である。
センサ20、40および磁場発生源10は、処理ユニット42に接続されている。この処理ユニット42は、センサ20および40により測定された測定値を取得し、また、磁場を発生させるために磁場発生源10に電力を供給する。一般的には、処理ユニット42は、磁場を発生させるための交流電流を磁場発生源10に供給する。
より詳細には、各センサ20、40の測定軸上において、処理ユニット42は、発生される磁場が有する直交位相および同相の磁場の成分の振幅を測定する。この目的を達成するために、処理ユニット42は、同期式検出器としてある。このような同期式検出器の一例は、米国特許第6528989号明細書の図16に示されている。従って、ここでは、処理ユニット42についての詳細な説明は行わない。
処理ユニット42は、基準座標系6における物体4の位置を特定するためのモジュール44に接続されている。一般的には、このモジュール44は、連立方程式を解くことにより、物体4の位置および方向を決定する。この連立方程式は、磁気外乱物の存在を考慮しないで、単軸磁場発生源と、センサを構成する異なる複数の単軸変換器との間の磁気相互作用をモデル化することにより得られる。この連立方程式において、物体4の位置x、y、zおよび方向θx、θy、θzは、未知であり、一方、他のパラメータの値は、センサ40による測定値から得られる。連立方程式に関するさらなる情報は、例えば、ヨーロッパ特許公開第1502544号明細書から得ることができる。
この連立方程式は、カルマンフィルタの形式で示されていることが好ましい。
この実施形態において、モジュール44は、磁場の測定値のための補償器46を備えている。この補償器46は、磁気外乱物によって生じるこれらの測定値の外乱の結果を小さくするために、磁場の測定値を補正する。次いで、このようにして補償された測定値は、物体4の位置を特定するために用いられる。
例えば、処理ユニット42は、電子基板の構成をとり、一方、モジュール44は、ソフトウエアモジュールの構成をとっている。従って、システム2は、処理ユニット42が組み込まれ、情報記録媒体に記録される命令を実行可能なプログラム可能な電子コンピュータ48を備えている。コンピュータ48には、コンピュータ48により実行されるときに、図4の方法を実行するための命令を保持するメモリ50が接続されている。また、コンピュータ48には、マンマシンインタフェース52が接続されている。例えば、マンマシンインタフェース52は、基準座標系6における物体4の位置を示すモニタを備えている。
磁場発生源10、センサ20および補償器46は、測定を行うセンサ40のための補償装置を構成している。
最後に、図1には、外乱物54が示されている。この外乱物54は、磁場発生源10に対して固定されている。この実施形態では、外乱物54は、水平面、すなわち、基準座標系6のX軸およびY軸によって定義される平面と平行な面を有する。より詳細には、ここでの外乱物54は、長さLxおよび幅lyを有する長方形の構成をとっている。これらの寸法Lxおよびlyは、磁場発生源10とセンサ40との距離rS2が、寸法Lxまたはlyの最小値の1/4よりも小さくなるように、十分に大きい。このように、外乱物54は、センサ40および20により測定される測定値に対して、無限平面と見なされる。
さらに、この第1実施形態において、外乱物54は、非常に高い導電性、すなわち、10S/mよりも大きい導電率、好ましくは、40〜50S/mよりも大きい導電率を有すると仮定される。例えば、外乱物54は、アルミニウム板である。この場合、この外乱物54は、手術台である。
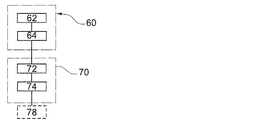
次に、図4の方法を参照して、システム2の動作を説明する。
この方法は、較正段階60から開始される。この較正段階60において、より具体的には、ステップ62において、磁場発生源10は、磁場を発生させ、センサ20は、この磁場を測定する。
次いで、これらの測定値は、処理ユニット42により取得され、補償器46に送信される。次に、補償器46は、外乱物54に対する磁場発生源10の像66の位置および磁気モーメントを決定するため、ステップ64に進む。
単軸の磁場発生源10の像66は、磁気外乱物54の反対側に配置される仮想磁場の理論的な磁場発生源である。外乱物54の面に垂直な仮想磁場の成分は、この面を通過して保持される。「保持」の用語は、垂直成分が交差する面の両側で同一であるという意味である。さらに、像66の位置および磁気モーメントの強度は、以下の関係式を最小にする。
Bme−(BS+BI)
式中、
Bmeは、外乱物54が存在する場合において、センサ20により測定される磁場、
BSは、外乱物54が存在しない場合において、センサ20により測定可能な磁場発生源10から発生される磁場、
BIは、外乱物54が存在しない場合において、センサ20により測定される像66から発生される仮想磁場である。
Bme−(BS+BI)
式中、
Bmeは、外乱物54が存在する場合において、センサ20により測定される磁場、
BSは、外乱物54が存在しない場合において、センサ20により測定可能な磁場発生源10から発生される磁場、
BIは、外乱物54が存在しない場合において、センサ20により測定される像66から発生される仮想磁場である。
このステップ64では、電磁気学の方程式を用いて、像66の位置および磁気モーメントMIが決定される。ここでまた、計算を簡単にするため、本発明では、双極子近似を用いる。このように、外乱物54が存在しない場合において、磁場発生源10および像66により発生され、センサ20により測定される磁場は、以下の関係式から得られる。
式中、
ベクトルB_mo1は、外乱物54が存在しない場合において、センサ20により測定される磁場発生源10およびその像66から発生される磁場、
μ0は、真空透磁率、
ベクトルMSは、磁場発生源10の磁気モーメント、
ベクトルrS1は、磁場発生源10の中心OSとセンサ20の中心OC1との距離、
ベクトルMIは、像66の磁気モーメント、
ベクトルrI1は、像66の中心とセンサ20の中心との距離である。
ベクトルB_mo1は、外乱物54が存在しない場合において、センサ20により測定される磁場発生源10およびその像66から発生される磁場、
μ0は、真空透磁率、
ベクトルMSは、磁場発生源10の磁気モーメント、
ベクトルrS1は、磁場発生源10の中心OSとセンサ20の中心OC1との距離、
ベクトルMIは、像66の磁気モーメント、
ベクトルrI1は、像66の中心とセンサ20の中心との距離である。
距離ベクトルrI1は、基準座標系6における像66の座標xI、yI、zIの関数である。磁気モーメントベクトルMSは、外乱物54の本質的に広がる平面と直交している。この特別な場合、電磁気学の像理論によれば、磁気モーメントベクトルMIは、必然的に磁気モーメントベクトルMSに平行である。また、このような仮定は、磁気モーメントベクトルMSが、外乱物54の本質的に広がる平面と平行であるときにも真である。この像理論におけるさらなる情報は、以下の論文から得ることができる。
−「ソマーフィールド半空間問題のための精密像理論、第1部:垂直磁気双極子」、アイ.リンデル、アンテナおよび伝播におけるIEEE会報、Vol.AP−32、No.2、1984年2月("Exact Image Theory for the Sommerfield Half-Space Problem, part I: Vertical Magnetic Dipole", I. Lindell, IEEE Transactions on Antennas and Propagation, Vol. AP-32, NO.2, February 1984)
−「ソマーフィールド半空間問題のための精密像理論、第111部:一般式」、アイ.リンデル、アンテナおよび伝播におけるIEEE会報、Vol.AP−32、No.10、1984年10月("Exact Image Theory for the Sommerfield Half-Space Problem, part 111: General Formulation能och, I. Lindell, IEEE Transactions on Antennas and Propagation, Vol. AP-32, NO.10, October 1984)
−「ソマーフィールド半空間問題のための精密像理論、第1部:垂直磁気双極子」、アイ.リンデル、アンテナおよび伝播におけるIEEE会報、Vol.AP−32、No.2、1984年2月("Exact Image Theory for the Sommerfield Half-Space Problem, part I: Vertical Magnetic Dipole", I. Lindell, IEEE Transactions on Antennas and Propagation, Vol. AP-32, NO.2, February 1984)
−「ソマーフィールド半空間問題のための精密像理論、第111部:一般式」、アイ.リンデル、アンテナおよび伝播におけるIEEE会報、Vol.AP−32、No.10、1984年10月("Exact Image Theory for the Sommerfield Half-Space Problem, part 111: General Formulation能och, I. Lindell, IEEE Transactions on Antennas and Propagation, Vol. AP-32, NO.10, October 1984)
従って、関係式(1)は、4つの未知数、すなわち、磁気モーメントMIの振幅に加えて、xI、yI、zIを有する。さらに、ベクトル形式で表現される関係式は、3つの方程式に対応している。このように、像66の磁気モーメントMIおよび位置を決定できるためには、さらなる制約条件を規定しなければならない。図1に示す特別な場合、外乱物54の寸法が、磁場発生源10とセンサ20との距離rS1、および、磁場発生源10とセンサ40との距離rS2よりも十分に大きければ、外乱物54は、無限大の大きさの導電性平面と仮定される。このように、電磁気学の像理論によれば、像66とこの無限大の大きさの平面との距離は、磁場発生源10とこの同一の平面との距離と等しい。従って、我々は、3つの方程式と3つの未知数からなる連立方程式が得られる。この連立方程式は、以下の判定基準を最小にする像66の位置および磁気モーメントを決定することにより解くことができる。
式中、
ベクトルB_me1は、センサ20により測定された磁場、
ベクトルB_mo1は、関係式(1)で定義されるように、磁場発生源10およびその像66により発生される磁場である。
ベクトルB_me1は、センサ20により測定された磁場、
ベクトルB_mo1は、関係式(1)で定義されるように、磁場発生源10およびその像66により発生される磁場である。
判定基準(2)を最小にする最適解の探索は、例えば、ソフトウエアアプリケーションであるマトラボ(Matlab(RM))のような公知の最適化ルーチンにより行われる。
像66の位置および磁気モーメントが決定されると、本発明では、基準座標系6における物体4の位置を特定するための段階70に進む。
この段階70は、磁場発生源10が磁場を発生させ、センサ40がこの発生された磁場を測定するステップ72において開始される。センサ40の測定値は、処理ユニット42により取得され、モジュール44および補償器46に送信される。
次いで、ステップ74において、補償器46により補償された測定値から、物体4の位置が決定される。この場合、補償された測定値は、センサ40により測定された磁場から、像66により発生された磁場を差し引いた値に対応する。
この実施形態において、基準座標系6における物体4の位置が未知であるため、物体4の位置の特定、およびセンサ40の測定値の補償が同時に行われる。
この目的を達成するため、ステップ74では、以下の判定基準を最小にするセンサ40の位置が決定される。
式中、
ベクトルB_me2は、センサ40により測定される磁場、
ベクトルB_mo2は、外乱物54が存在しない場合において、センサ40および像66により発生される磁場である。
ベクトルB_me2は、センサ40により測定される磁場、
ベクトルB_mo2は、外乱物54が存在しない場合において、センサ40および像66により発生される磁場である。
電磁気学の方程式によれば、双極子近似を用いて、磁場ベクトルB_mo2は、以下の関係式から与えられる。
式中、
rS2は、磁場発生源10の中心とセンサ40の中心との距離、
rI2は、像66の中心とセンサ40との距離である。
rS2は、磁場発生源10の中心とセンサ40の中心との距離、
rI2は、像66の中心とセンサ40との距離である。
これらの異なる距離は、図1に示してある。
関係式(4)の第2項は、像66により発生され、センサ40により測定可能な磁場に対応する。この第2項は、物体4の位置を特定するために用いられる磁場の厳密に補償された測定値とするため、判定基準(3)における磁場ベクトルB_me2の測定値から差し引かれる。
ステップ74において、連立方程式の未知数は、距離rS2およびrI2である。この連立方程式が解かれると、物体4の位置が求められる。
必要に応じて、段階70の後、ステップ78において、センサ40により測定された磁場の補償された測定値は、像66により同時に発生された磁場の値である磁場ベクトルB_me2から差し引いて表すことができる。
図5は、物体4の位置を特定するためのシステム90を示し、このシステム90は、磁場外乱物を無限大の導電平面と見なせない場合に用いることができる。例えば、この第2実施形態では、外乱物54は、高い導電性を有しておらず、または、上部平面の寸法が無限大の導電平面と見なすには十分に大きくない外乱物92に置き換えられる。例えば、図5に示されている外乱物92は、無限平面と見なすには小さすぎる。結局、この場合には、連立方程式の未知数の数は、方程式の数よりも多い。従って、ステップ64において、センサ20の測定値だけでは、磁場発生源10の像66の位置を精密に測定することはできない。この問題を解決するために、システム90は、磁場発生源10に対する位置が既知であるセンサ94を追加する。これ以外は、システム2と同一である。例えば、このセンサ94は、磁場発生源10に対して固定される。
このシステム90の動作は、ステップ64において、像66の位置および磁気モーメントを、センサ20および94の測定値から決定すること以外は、システム2の動作と同一である。この目的を達成するため、例えば、外乱物92が存在しない場合において、磁場発生源10およびその像66により発生される磁場は、以下の方程式によりモデル化される。
式中、
ベクトルB_mo11は、外乱物92が存在しない場合において、センサ20により測定される磁場発生源10および像66から発生される磁場、
ベクトルB_mo12は、外乱物92が存在しない場合において、センサ94により測定される磁場発生源10および像66から発生される磁場、
ベクトルrS11およびrS12は、磁場発生源10とセンサ20の距離、および、磁場発生源10とセンサ94の距離、
ベクトルrI11およびrI12は、像66とセンサ20の距離、および、像66とセンサ94の距離である。
ベクトルB_mo11は、外乱物92が存在しない場合において、センサ20により測定される磁場発生源10および像66から発生される磁場、
ベクトルB_mo12は、外乱物92が存在しない場合において、センサ94により測定される磁場発生源10および像66から発生される磁場、
ベクトルrS11およびrS12は、磁場発生源10とセンサ20の距離、および、磁場発生源10とセンサ94の距離、
ベクトルrI11およびrI12は、像66とセンサ20の距離、および、像66とセンサ94の距離である。
次いで、像66の位置および磁気モーメントベクトルMIは、以下の判定基準を最小にするように決定される。
式中、
ベクトルB_me11およびベクトルB_me12は、センサ20および94によりそれぞれ測定される磁場の測定値である。
ベクトルB_me11およびベクトルB_me12は、センサ20および94によりそれぞれ測定される磁場の測定値である。
解かれる連立方程式は、6つの方程式と6つの未知数とを有する。従って、上記の判定基準(7)および(8)を最小にする像66の位置を正確に決定することが可能である。
このステップが終了すると、図4を参照して正確に説明するように、基準座標系6における物体4の位置を特定するための段階となる。
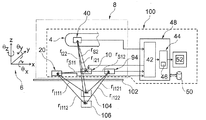
図6は、物体4の位置を特定するためのシステム100を示し、このシステム100は、特に、高い導電性および透過性を同時に有する磁気外乱物102により測定値が乱される場合に適用される。例えば、この場合、外乱物102は、磁気ステンレス鋼の板である。この板の寸法は、例えば、図1を参照して説明した外乱物54と同一である。
この場合における測定値の補償を改善するため、磁場発生源10の2つの像が設定される。先ず第1に、以下に「導電像」と言う像104は、外乱物102を、同一寸法で正確に同一の導電率を有する材料からなるが、非透過性である外乱物に置き換える場合に対応する。「非透過性」の用語は、比透磁率が1であることを意味している。
また、以下に「磁気像」と言う磁場発生源10の他の像106が設定される。この像106は、外乱物102を、正確に同一寸法で同一の透過率を有する材料からなるが、非導電性である外乱物に置き換える場合に対応している。
図6を単純化するため、像104および106は、一方を他方の上に表す。
システム100は、像104および106の位置および磁気モーメントを計算するために必要とされる命令を除き、システム90と同一である。この目的を達成するため、システム100は、高い導電性および非透過性を有する外乱物102が、本質的には、磁場の直交位相の測定値を乱すという事実を利用する。反対に、透過性および非導電性を有する外乱物は、本質的には、磁場の同相の測定値を乱す。
従って、システム100の動作は、ステップ64において、像104および106の位置および磁気モーメントが、以下の関係式により決定されることを除き、図4を参照して説明したものと同一である。
式中、
ベクトルB_mo11_Qは、外乱物102が存在しない場合において、センサ20により測定される磁場発生源10および像104から発生される磁場の直交位相磁場、
ベクトルB_mo11_Iは、外乱物102が存在しない場合において、センサ20により測定される磁場発生源10および像106から発生される磁場の同相磁場、
ベクトルB_mo12_Qは、外乱物102が存在しない場合において、センサ94により測定される磁場発生源10および像104から発生される磁場の直交位相磁場、
ベクトルB_mo12_Iは、外乱物102が存在しない場合において、センサ94により測定される磁場発生源10および像106から発生される磁場の同相磁場、
ベクトルrS11、ベクトルrI111およびベクトルrI112は、センサ20と磁場発生源10の距離、センサ20と像104の距離、および、センサ20と像106の距離、
ベクトルMI1およびベクトルMI2は、像104および106の磁気モーメント、
ベクトルrS12、ベクトルrI121およびベクトルrI122は、センサ94と磁場発生源10の距離、センサ94と像104の距離、および、センサ94と像106の距離である。
ベクトルB_mo11_Qは、外乱物102が存在しない場合において、センサ20により測定される磁場発生源10および像104から発生される磁場の直交位相磁場、
ベクトルB_mo11_Iは、外乱物102が存在しない場合において、センサ20により測定される磁場発生源10および像106から発生される磁場の同相磁場、
ベクトルB_mo12_Qは、外乱物102が存在しない場合において、センサ94により測定される磁場発生源10および像104から発生される磁場の直交位相磁場、
ベクトルB_mo12_Iは、外乱物102が存在しない場合において、センサ94により測定される磁場発生源10および像106から発生される磁場の同相磁場、
ベクトルrS11、ベクトルrI111およびベクトルrI112は、センサ20と磁場発生源10の距離、センサ20と像104の距離、および、センサ20と像106の距離、
ベクトルMI1およびベクトルMI2は、像104および106の磁気モーメント、
ベクトルrS12、ベクトルrI121およびベクトルrI122は、センサ94と磁場発生源10の距離、センサ94と像104の距離、および、センサ94と像106の距離である。
ステップ64において、像104および106の位置および磁気モーメントは、以下の判定基準を最小にする探索により決定される。
式中、
ベクトルB_me11_QおよびベクトルB_me11_Iは、外乱物102が存在する場合において、磁場発生源10により発生される磁場の直交位相および同相のセンサ20により測定される測定値、
ベクトルB_me12_QおよびベクトルB_me12_Iは、外乱物102が存在する場合において、磁場発生源10により発生される磁場の直交位相および同相のセンサ94により測定される測定値である。
ベクトルB_me11_QおよびベクトルB_me11_Iは、外乱物102が存在する場合において、磁場発生源10により発生される磁場の直交位相および同相のセンサ20により測定される測定値、
ベクトルB_me12_QおよびベクトルB_me12_Iは、外乱物102が存在する場合において、磁場発生源10により発生される磁場の直交位相および同相のセンサ94により測定される測定値である。
従って、上記の方程式は、像104および106の位置および磁気モーメントを正確に決定しうる12の方程式、および8つの未知数を有する連立方程式に対応している。
次いで、位置を特定する段階、より詳細には、ステップ74において、物体4の位置は、関係式(17)により決定される。
式中、
ベクトルB_mo2は、外乱物102が存在しない場合において、センサ40により測定される磁場発生源10および像104、106から発生される磁場、
ベクトルrS2、ベクトルrI21およびベクトルrI22は、センサ40と磁場発生源10の距離、センサ40と像104の距離、および、センサ40と像106の距離である。
ベクトルB_mo2は、外乱物102が存在しない場合において、センサ40により測定される磁場発生源10および像104、106から発生される磁場、
ベクトルrS2、ベクトルrI21およびベクトルrI22は、センサ40と磁場発生源10の距離、センサ40と像104の距離、および、センサ40と像106の距離である。
次いで、センサ40の位置は、ステップ74において、以下の判定基準の最小値を見いだすことにより測定される。
ここで、ベクトルB_me2は、外乱物102が存在する場合において、センサ40により測定される磁場である。
この判定基準(18)は、3つの方程式、および3つの未知数、すなわち、距離rS2、rI21およびrI22を有する連立方程式に対応している。この関係式の最小値は、基準座標系6におけるセンサ40の位置を与える。
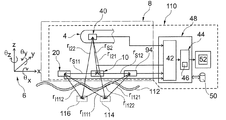
図7は、物体4の位置を特定するための他のシステム110を示す。このシステム110は、本質的には、像理論において用いられる形状から、より隔たった形状を有する磁気特性の磁気外乱物112により、磁場の測定値が乱される場合に適用される。この場合、システム110は、外乱物112に対する磁場発生源10の複数の像が設定される命令を有する。例えば、ここでは、磁場発生源10の2つの像114および116が用いられる。この目的を達成するため、システム110は、像114および116の位置、および磁気モーメントを決定する命令を有することを除き、システム90と同一である。
より詳細には、システム110の動作は、ステップ64および74が、第1に、像114および116の位置および磁気モーメントを決定するのに適合し、第2に、センサ40の測定値を補償するため、これらの像114および116により発生される磁場を用いるのに適合されることを除き、システム90の動作と同一である。
例えば、ステップ64では、以下の関係式が用いられる。
式中、
ベクトルB_mo11は、磁場発生源10および像114により発生され、センサ20により測定可能な磁場、
ベクトルB_mo12は、外乱物112が存在しない場合において、磁場発生源10および像116により発生され、センサ20により測定可能な磁場、
ベクトルrS11およびベクトルrI111は、センサ20と磁場発生源10の距離、および、センサ20と像114の距離、
ベクトルrS12およびベクトルrI122は、センサ94と磁場発生源10の距離、および、センサ94と像116の距離、
ベクトルMI1およびベクトルMI2は、像114および116の磁気モーメントである。
ベクトルB_mo11は、磁場発生源10および像114により発生され、センサ20により測定可能な磁場、
ベクトルB_mo12は、外乱物112が存在しない場合において、磁場発生源10および像116により発生され、センサ20により測定可能な磁場、
ベクトルrS11およびベクトルrI111は、センサ20と磁場発生源10の距離、および、センサ20と像114の距離、
ベクトルrS12およびベクトルrI122は、センサ94と磁場発生源10の距離、および、センサ94と像116の距離、
ベクトルMI1およびベクトルMI2は、像114および116の磁気モーメントである。
次いで、像114および116の位置および磁気モーメントは、以下の判定基準の最適値を見つけることで決定される。
式中、
ベクトルB_me11およびベクトルB_me12は、センサ20および94によって測定される磁場発生源10から発生される磁場の測定値である。
ベクトルB_me11およびベクトルB_me12は、センサ20および94によって測定される磁場発生源10から発生される磁場の測定値である。
これらの判定基準(21)および(22)は、6つの方程式および8つの未知数を有する連立方程式に対応している。このように、最小値を見いだすため、像114および116の位置または磁気モーメントに2つの付加的制約条件が導入される。これらの付加的制約条件は、電磁気学の像理論から導き出される。例えば、この場合、外乱物112の導電率σおよび透過率μrが既知であると仮定する。このように、磁気モーメントベクトルMI1およびMI2は、以下の関係式から計算することができる。
ここで、Miは、像114または116の磁気モーメントである。
次いで、ステップ74において、次の方程式(23)により、センサ40の位置が決定される。
式中、
rS2、rI21およびrI22は、センサ40と磁場発生源10の距離、センサ40と像114の距離、および、センサ40と像116の距離、
B_mo2は、磁気外乱物112が存在していない場合において、磁場発生源10および像114により発生され、センサ40により測定可能な磁場である。
rS2、rI21およびrI22は、センサ40と磁場発生源10の距離、センサ40と像114の距離、および、センサ40と像116の距離、
B_mo2は、磁気外乱物112が存在していない場合において、磁場発生源10および像114により発生され、センサ40により測定可能な磁場である。
次いで、センサ40の位置は、次の判定基準の最小値を見いだすことにより決定される。
ここで、ベクトルB_me2は、外乱物112が存在する場合において、センサ40により測定される磁場である。
上記の判定基準は、基準座標系6におけるセンサ40の位置を得ることのできる3つの方程式と3つの未知数を有する連立方程式に対応している。
多数の他の実施形態が可能である。例えば、磁場発生源10は、基準座標系6に固定されている必要はない。変形例として、磁場発生源10は、基準座標系6に対し、公知の方法で移動させることができる。
センサ20および40に対しても、2つの別個のものであれば、同様にして固定されている必要はない。例えば、変形例として、センサ20は、較正段階において、既知の所定位置に配置され、次いで、物体4の位置を特定する段階において、物体4に固定される。
センサの数、および/またはこれらのセンサの測定軸の数は、変更することができる。全ての場合において、この数は、磁場発生源10の少なくとも1つの像の位置および磁気モーメントを正確に決定し、物体4の位置を特定することが可能な十分な数でなければならない。
磁場発生源10の像の位置を決定するため、電磁気学の像理論から導かれる他の制約条件が、用いられるセンサの数、またはセンサの軸の数を制限するために用いることができる。例えば、外乱物の導電率σおよび透過率μrが既知の場合、以下の関係式を用いることができる。
ここで、Miは、像の磁気モーメントである。
外乱物が一意的に透過性または導電性であれば、外乱物の平面に交差する磁場の垂直成分の保存則は、像の磁場発生源のモーメントの方向を決定することができる。
磁場発生源10またはセンサの軸の数は、変更することができる。しかしながら、この軸の数は、物体4の位置を特定する場合と同様に、像の位置および磁気モーメントを決定できるために十分な数がなければならない。
ここで、特に、測定値を補償して位置を特定するシステムは、磁気外乱物が存在しない場合において測定される磁場が、電磁気学の方程式によって計算される場合として説明されている。しかしながら、他の変形例では、この磁場を測定することができる。この目的を達成するため、磁場発生源10の磁場は、磁気外乱物が存在しない場合において、センサ20および/または94によって測定される。次いで、この磁気外乱物に対する磁場発生源10の像の位置および磁気モーメントが、この像により生成される磁場が以下の関係式を最小にするように計算される。
式中、
ベクトルBmeおよびベクトルBSは、磁気外乱物が存在する場合および存在しない場合において測定される磁場、
ベクトルBiは、位置および磁気モーメントが決定されていなければならない磁場発生源10の像により発生される磁場である。
ベクトルBmeおよびベクトルBSは、磁気外乱物が存在する場合および存在しない場合において測定される磁場、
ベクトルBiは、位置および磁気モーメントが決定されていなければならない磁場発生源10の像により発生される磁場である。
システム100は、
−高い導電性および非透過性の外乱物は、本質的に磁場の直交位相における測定値を乱し、
−透過性および非導電性の外乱物は、本質的に磁場の同相における測定値を乱す、
という理論を利用する。
−高い導電性および非透過性の外乱物は、本質的に磁場の直交位相における測定値を乱し、
−透過性および非導電性の外乱物は、本質的に磁場の同相における測定値を乱す、
という理論を利用する。
現実的には、この理論は完全ではないことがわかる。この場合、補償を改善するため、磁場の有効係数に焦点を合わせることができる。磁場の有効係数Aは、以下の関係式により定義される。
式中、
Aは、測定される磁場の有効係数、
Iは、磁場発生源10により発生される磁場を同相で測定した磁場の振幅、
Qは、磁場発生源10により発生される磁場を直交位相で測定した磁場の振幅である。
Aは、測定される磁場の有効係数、
Iは、磁場発生源10により発生される磁場を同相で測定した磁場の振幅、
Qは、磁場発生源10により発生される磁場を直交位相で測定した磁場の振幅である。
この場合、システム100の動作は、ステップ64において、例えば、以下の関係式により有効係数A_mo11およびA_mo12が計算されることを除き、図6を参照して説明したものと同一である。
式中、
A_mo11およびA_mo12は、外乱物102が存在しない場合において、センサ20および94により測定される磁場発生源10および像104、106から発生される磁場の有効係数、
B_mo11_QおよびB_mo12_Qは、外乱物102が存在しない場合において、センサ20により測定される磁場発生源10および像104、106から発生される直交位相の磁場の振幅、
B_mo11_Iおよびは、外乱物102が存在しない場合において、センサ94により測定される磁場発生源10および像104、106から発生される同相の磁場の振幅である。
A_mo11およびA_mo12は、外乱物102が存在しない場合において、センサ20および94により測定される磁場発生源10および像104、106から発生される磁場の有効係数、
B_mo11_QおよびB_mo12_Qは、外乱物102が存在しない場合において、センサ20により測定される磁場発生源10および像104、106から発生される直交位相の磁場の振幅、
B_mo11_Iおよびは、外乱物102が存在しない場合において、センサ94により測定される磁場発生源10および像104、106から発生される同相の磁場の振幅である。
例えば、振幅B_mo11_Q、B_mo11_I、B_mo12_QおよびB_mo12_Iは、上述した関係式(9)〜(12)から決定される。
次いで、像104および106の位置は、以下の判定基準を最小にすることで決定される。
式中、A_me11およびA_me12は、センサ20および94により測定される磁場の有効係数である。
方程式の数を増やし、像104および106の位置および磁気モーメントをより正確に決定することを可能とするため、以下の2つの関係式を用いることができる。
外乱物102の導電率σおよび透過率μrは、既知であってもよく、未知であってもよい。未知である場合、それらは決定される。
また、有効係数は、磁場発生源10の単一の像の位置および磁気モーメントを決定するために用いられる。この場合、上記の関係式は、単純化される。
1つ以上の像の位置を決定する磁場の有効係数を用いる必要がなく、磁気外乱物が導電性で非透過性である場合には、この磁場の有効振幅の代わりに、磁場の直交位相の測定値だけを用いることができる。反対に、磁気外乱物が単に透過性であり非導電性である場合には、この磁場の有効振幅の代わりに、磁場の同相の測定値だけを用いることができる。
ここでは、補償された測定値が物体の位置を正確に特定するために用いられる特定の場合における測定値の補償について説明した。しかしながら、変形例として、この補償方法を、他の応用に用いることができる。例えば、上記補正方法は、位置が既知であるセンサの測定値を補償するために用いることができる。この場合、ステップ74において、磁気モーメントMSおよびMiが未知の量であり、プローブとセンサの前記プローブの像との間の異なる距離が既知である。
2、90、100、110 システム
4 物体
6 基準座標系
8 人体
10 磁場発生源
12、24〜26 軸(測定軸)
14 単コイル
20、40、94 センサ
28〜30 変換器
54、92、102、112 磁気外乱物
66、104、106 像
42 処理ユニット
44 モジュール
46 補償器
48 コンピュータ
50 メモリ
52 マンマシンインタフェース
60 較正段階
62、64、72、74、78 ステップ
70 段階
4 物体
6 基準座標系
8 人体
10 磁場発生源
12、24〜26 軸(測定軸)
14 単コイル
20、40、94 センサ
28〜30 変換器
54、92、102、112 磁気外乱物
66、104、106 像
42 処理ユニット
44 モジュール
46 補償器
48 コンピュータ
50 メモリ
52 マンマシンインタフェース
60 較正段階
62、64、72、74、78 ステップ
70 段階
Claims (11)
- 磁場の測定値を補償する方法において、
−磁気外乱物が存在する場合に、前記磁気外乱物の一方側に配置され、磁気モーメントが既知である単軸磁場発生源により磁場を発生するステップ(62)と、
−前記磁気外乱物の他方側に配置される前記単軸磁場発生源の像の位置および磁気モーメントを、前記単軸磁場発生源に対する位置および方向が既知である少なくとも1つの磁気センサにより測定される発生された磁場の1つ以上の測定値を用いて、前記各磁気センサに対する以下の関係式を最小にする前記像の位置および磁気モーメントとして決定するステップ(64)と、
・ベクトルBSは、前記磁気外乱物が存在しない場合において、前記磁気センサにより測定される磁場、
・ベクトルBIは、前記磁気外乱物が存在しない場合において、前記磁気センサにより測定される前記像から発生される仮想磁場、
前記測定値を補償するため、前記磁気外乱物が存在する場合に、前記磁気センサにより測定される磁場の測定値から、前記像の位置および磁気モーメントで構成され、前記像により発生される磁場を差し引くステップ(74)
とを備えることを特徴とする磁場測定値補償方法。 - 前記像の位置および磁気モーメントを決定するステップでは、電磁気学の像理論から導かれる以下の組から選択される少なくとも1つのまたは複数の補助関係式が用いられ、
・σおよびμrは、前記磁気外乱物の導電率および比透磁率、
−前記単軸磁場発生源と前記磁気外乱物の間の最短距離が、前記単軸磁場発生源の前記像と前記磁気外乱物の間の最短距離に等しく、
−前記磁気外乱物の一方の面に交差する磁場の垂直成分が、前記面の両側で保持されていることを特徴とする請求項1記載の磁場測定値補償方法。 - 前記単軸磁場発生源に対する位置および方向が既知である1つまたは複数の前記磁気センサにより測定され、前記単軸磁場発生源により発生される磁場に対する直交位相の磁場の測定値のみから、前記単軸磁場発生源の位置および磁気モーメントを決定するステップ(64)と、
前記単軸磁場発生源に対する位置および方向が既知である1つまたは複数の前記磁気センサにより測定され、前記単軸磁場発生源により発生される磁場における同相の磁場の測定値のみから、前記単軸磁場発生源の位置および磁気モーメントを決定するステップ(64)とを備えることを特徴とする請求項1または2に記載の磁場測定値補償方法。 - 前記単軸磁場発生源に対する位置および方向が既知である1つまたは複数の前記磁気センサにより測定され、前記単軸磁場発生源により発生される磁場に対する同相および直交位相の磁場の測定値から磁場の有効係数を計算するステップと、
磁場の前記有効係数から前記単軸磁場発生源の少なくとも1つの像の位置および磁気モーメントを決定するステップとを備えることを特徴とする請求項1〜3のいずれか1項に記載の磁場測定値補償方法。 - 位置および方向が、前記単軸磁場発生源に対して既知である複数の前記磁気センサにより測定される磁場の同じ測定値から、同じ前記単軸磁場発生源の複数の像の位置および磁気モーメントを決定するステップ(64)と、
前記測定値を補償するため、前記磁気外乱物が存在する場合において、1つの前記センサにより測定される磁場の測定値から、複数の前記像より発生される磁場を差し引くステップ(74)とを備えることを特徴とする請求項1〜4のいずれか1項に記載の磁場測定値補償方法。 - 前記単軸磁場発生源の各像は、磁気双極子としてモデル化されることを特徴とする請求項1〜5のいずれか1項に記載の磁場測定値補償方法。
- 物体の位置を特定する方法において、
磁気外乱物が存在する場合に、前記磁気外乱物の一方側に配置される磁気モーメントが既知である単軸磁場発生源により磁場を発生するステップ(62)と、
前記物体に固定される自由度のない磁気センサにより、発生される磁場を測定するステップ(72)と、
前記磁気センサの測定値により、前記単軸磁場発生源に対する前記物体の位置を特定するステップ(74)とを備え、前記位置の特定で、前記磁気センサの測定値を、請求項1〜6のいずれか1項に記載の方法により補償することを特徴とする物体の位置特定方法。 - 前記位置を特定するステップ(74)は、前記単軸磁場発生源およびその1つまたは複数の像が配置される前記磁気センサからの距離を決定するステップを備えることを特徴とする請求項7記載の物体位置特定方法。
- 請求項1〜8のいずれか1項に記載の方法を実行するための命令を備え、これらの命令は、電子コンピュータにより実行されることを特徴とする情報記録媒体(50)。
- 磁場の測定値を補償する装置において、
磁気外乱物が存在する場合に、前記磁気外乱物の一方側に配置され、磁気モーメントが既知である磁場を発生可能な単軸磁場発生源を備え、
前記装置は、
前記単軸磁場発生源に対する位置および磁気モーメントが既知である少なくとも1つの磁気センサ(10;20、94)と、
前記磁気外乱物の他方側に配置される前記単軸磁場発生源の像の位置および磁気モーメントを、1つまたは複数の磁気センサにより測定される前記単軸磁場発生源から発生された磁場の1つ以上の測定値を用いて、前記各磁気センサに対する以下の関係式を最小にする前記像の位置および磁気モーメントとして決定し、
・ベクトルBSは、前記磁気外乱物が存在しない場合において、前記磁気センサにより測定される磁場、
・ベクトルBIは、前記磁気外乱物が存在しない場合において、前記磁気センサにより測定される前記像から発生される仮想磁場、
−前記測定値を補償するため、前記磁気センサにより測定される磁場の測定値から、前記像の位置および磁気モーメントからなり、前記像により発生される磁場を差し引くことの可能な補償器とを備えることを特徴とする磁場測定値補償装置。 - 物体の位置を特定するシステムにおいて、
磁気外乱物が存在する場合に、前記磁気外乱物の一方側に配置され、磁気モーメントが既知である磁場を発生可能な少なくとも1つの単軸磁場発生源と、
配置される前記物体に自由度のない状態で固定され、前記単軸磁場発生源により発生される磁場を検出する少なくとも1つの磁気センサ(40)と、
前記磁気センサによる測定から、前記単軸磁場発生源に対する前記磁気センサの位置を特定するためのモジュールとを備え、前記システムは、請求項10に係る位置を特定する前記モジュールで用いられる測定値を補償する装置を有することを特徴とする物体位置特定システム。
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR1052836 | 2010-04-14 | ||
| FR1052836A FR2959019B1 (fr) | 2010-04-14 | 2010-04-14 | Procede et dispositif de compensation d'une mesure d'un champ magnetique, procede et systeme de localisation d'un objet, support d'enregistrement pour ces procedes |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2011227074A true JP2011227074A (ja) | 2011-11-10 |
Family
ID=42938533
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011088713A Withdrawn JP2011227074A (ja) | 2010-04-14 | 2011-04-13 | 磁場測定値補償方法および装置、物体位置特定方法およびシステム、ならびに、これらの方法の情報記録媒体 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US9354282B2 (ja) |
| EP (1) | EP2378305B1 (ja) |
| JP (1) | JP2011227074A (ja) |
| FR (1) | FR2959019B1 (ja) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020095021A (ja) * | 2018-12-10 | 2020-06-18 | マックス−プランク−ゲゼルシャフト ツール フェルデルンク デル ヴィッセンシャフテン エー.ファウ. | 作業空間に対して磁気作動システムおよび検出システムを同時に較正する方法、および磁気作動検出システム |
| WO2022005227A1 (ko) * | 2020-07-03 | 2022-01-06 | 삼성전자 주식회사 | 자기 센서를 포함하는 전자 장치 및 자기 검출 방법 |
Families Citing this family (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| PT3076206T (pt) * | 2015-04-01 | 2019-03-14 | Ontech Security S L | Sistema de segurança doméstica |
| FR3038729B1 (fr) * | 2015-07-09 | 2019-05-03 | Commissariat A L'energie Atomique Et Aux Energies Alternatives | Procede de localisation d'un objet magnetique |
| FR3048783B1 (fr) | 2016-03-11 | 2018-04-06 | Commissariat A L'energie Atomique Et Aux Energies Alternatives | Procede de detection d'une anomalie dans le cadre de l'utilisation d'un dispositif de localisation magnetique |
| CN111413651B (zh) * | 2020-03-30 | 2021-04-13 | 中国科学院上海微系统与信息技术研究所 | 一种磁场总场的补偿方法、装置、系统及存储介质 |
| CN114440870B (zh) * | 2021-12-29 | 2023-06-27 | 宜昌测试技术研究所 | 一种基于自适应互补滤波的九轴磁罗盘姿态获取方法 |
| WO2024033464A1 (en) | 2022-08-12 | 2024-02-15 | Universität Stuttgart | Localization device and method |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5182514A (en) * | 1974-11-19 | 1993-01-26 | Texas Instruments Incorporated | Automatic compensator for an airborne magnetic anomaly detector |
| US5134369A (en) * | 1991-03-12 | 1992-07-28 | Hughes Aircraft Company | Three axis magnetometer sensor field alignment and registration |
| US6528989B1 (en) | 2000-03-21 | 2003-03-04 | Skysense, Ltd. | AC magnetic tracker for operation close to metallic objects |
| US7020512B2 (en) * | 2002-01-14 | 2006-03-28 | Stereotaxis, Inc. | Method of localizing medical devices |
| US7321228B2 (en) | 2003-07-31 | 2008-01-22 | Biosense Webster, Inc. | Detection of metal disturbance in a magnetic tracking system |
| SE529125C2 (sv) * | 2005-03-02 | 2007-05-08 | Tetra Laval Holdings & Finance | Sätt och anordning för att bestämma läget hos ett förpackningsmaterial med magnetiska markeringar |
| FR2931248B1 (fr) * | 2008-05-14 | 2012-07-27 | Movea Sa | Systeme de mesure de champ magnetique comprenant un capteur triaxial de mesure de champ magnetique mobile conjointement avec un element porteur perturbant les mesures et procede associe |
-
2010
- 2010-04-14 FR FR1052836A patent/FR2959019B1/fr not_active Expired - Fee Related
-
2011
- 2011-04-13 US US13/085,523 patent/US9354282B2/en not_active Expired - Fee Related
- 2011-04-13 EP EP11162318.7A patent/EP2378305B1/fr not_active Not-in-force
- 2011-04-13 JP JP2011088713A patent/JP2011227074A/ja not_active Withdrawn
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020095021A (ja) * | 2018-12-10 | 2020-06-18 | マックス−プランク−ゲゼルシャフト ツール フェルデルンク デル ヴィッセンシャフテン エー.ファウ. | 作業空間に対して磁気作動システムおよび検出システムを同時に較正する方法、および磁気作動検出システム |
| JP7423266B2 (ja) | 2018-12-10 | 2024-01-29 | マックス-プランク-ゲゼルシャフト ツール フェルデルンク デル ヴィッセンシャフテン エー.ファウ. | 作業空間に対して磁気作動システムおよび検出システムを同時に較正する方法、および磁気作動検出システム |
| WO2022005227A1 (ko) * | 2020-07-03 | 2022-01-06 | 삼성전자 주식회사 | 자기 센서를 포함하는 전자 장치 및 자기 검출 방법 |
Also Published As
| Publication number | Publication date |
|---|---|
| US9354282B2 (en) | 2016-05-31 |
| FR2959019B1 (fr) | 2012-06-08 |
| EP2378305B1 (fr) | 2013-09-11 |
| EP2378305A1 (fr) | 2011-10-19 |
| US20110267046A1 (en) | 2011-11-03 |
| FR2959019A1 (fr) | 2011-10-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2011227074A (ja) | 磁場測定値補償方法および装置、物体位置特定方法およびシステム、ならびに、これらの方法の情報記録媒体 | |
| US7532997B2 (en) | Electromagnetic tracking using a discretized numerical field model | |
| US6335617B1 (en) | Method and apparatus for calibrating a magnetic field generator | |
| KR20050014759A (ko) | 자기 추적 시스템에서 금속 교란 검출 방법 | |
| JP6710747B2 (ja) | 位置追跡システム | |
| CN101410724A (zh) | 在电磁跟踪系统中进行局部误差补偿的系统 | |
| KR20040045363A (ko) | 동적 금속 면역체 | |
| JP2008062040A (ja) | 重複した測定を用いた歪みに対して免疫性の位置追跡 | |
| O’Donoghue et al. | Catheter position tracking system using planar magnetics and closed loop current control | |
| CA2388570A1 (en) | Method and system for navigating a catheter probe in the presence of field-influencing objects | |
| CA2883162C (en) | Calibration jig for a flat location pad | |
| CA2869267C (en) | Magnetic sensors | |
| US20070225594A1 (en) | Facilitation of In-Boundary Distortion Compensation | |
| JP2019035629A (ja) | 較正装置、較正方法、回転角検出装置およびプログラム | |
| JP2014085176A (ja) | ポインティングベクトル計測装置 | |
| US20220252685A1 (en) | Magnetic resonance imaging device, computer-implemented method for operating a magnetic resonance imaging device, computer program and electronically readable storage medium | |
| JP2020503082A (ja) | マップに基づいて電磁センサの位置及び/又は配向を特定するためのシステム及び方法 | |
| JP6375956B2 (ja) | 等価電界強度推定方法および放射妨害波測定装置 | |
| Schroeder | An accurate magnetic field solution for medical electromagnetic tracking coils at close range | |
| US11944388B2 (en) | Systems and methods for magnetic interference correction | |
| Swanepoel et al. | Magnetic Catheter Placement in Neonates: A Handheld Solution to Radiation Exposure and Operational Delays | |
| Sun et al. | A locally weighted method for electromagnetic localization of endoscopes | |
| Zhelamskii | Features of the measurement of a local positioning magnetic field at short distances | |
| CN117338421A (zh) | 有线交变电磁定位系统及其定位方法 | |
| AU2012216419B2 (en) | Distortion-immune position tracking using redundant measurements |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20140701 |