JP2010207292A - 手袋及び手技記録再生装置 - Google Patents
手袋及び手技記録再生装置 Download PDFInfo
- Publication number
- JP2010207292A JP2010207292A JP2009054198A JP2009054198A JP2010207292A JP 2010207292 A JP2010207292 A JP 2010207292A JP 2009054198 A JP2009054198 A JP 2009054198A JP 2009054198 A JP2009054198 A JP 2009054198A JP 2010207292 A JP2010207292 A JP 2010207292A
- Authority
- JP
- Japan
- Prior art keywords
- data
- glove
- joint
- recording
- sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images








Landscapes
- Medical Treatment And Welfare Office Work (AREA)
Abstract
【課題】外科手術に臨む執刀医の手技をデータに変換して記録するための手袋と、これを用いた手技記録再生装置を提供する。
【解決手段】手術用手袋は、手に接触する第一層ゴム膜と、前記第一層ゴム膜上の、手指の屈曲箇所に貼付される複数の屈曲センサとを備える。また、手技記録再生装置は、手に接触する第一層ゴム膜と、前記第一層ゴム膜上の、手指の屈曲箇所に貼付される複数の屈曲センサとを備える手袋の、前記複数の屈曲センサに接続され、複数の屈曲センサから得られる電気信号をデータ化するA/D変換部と、時刻情報を発生するリアルタイムクロックと、A/D変換部から得られるデータを時刻情報と共に所定の記録媒体に記録する記録部と、記録媒体に記録されたデータを前記時刻情報に基づいて再生する再生部とを備える。
【選択図】図1
【解決手段】手術用手袋は、手に接触する第一層ゴム膜と、前記第一層ゴム膜上の、手指の屈曲箇所に貼付される複数の屈曲センサとを備える。また、手技記録再生装置は、手に接触する第一層ゴム膜と、前記第一層ゴム膜上の、手指の屈曲箇所に貼付される複数の屈曲センサとを備える手袋の、前記複数の屈曲センサに接続され、複数の屈曲センサから得られる電気信号をデータ化するA/D変換部と、時刻情報を発生するリアルタイムクロックと、A/D変換部から得られるデータを時刻情報と共に所定の記録媒体に記録する記録部と、記録媒体に記録されたデータを前記時刻情報に基づいて再生する再生部とを備える。
【選択図】図1
Description
本発明は、手袋及び手技記録再生装置に適用して好適な技術に関する。
より詳細には、外科手術に臨む執刀医の手技をデータに変換して記録するための手袋と、これを用いた手技データの記録装置に関する。
より詳細には、外科手術に臨む執刀医の手技をデータに変換して記録するための手袋と、これを用いた手技データの記録装置に関する。
医療技術の進歩に伴い、医療技術を明確なデータとして蓄積し、これを活用しようとする動きが高まっている。
医療データを活用する具体例としては、医療行為をデータ化し、成功例と失敗例とで分類し、そのデータの推移を見ることで、ノウハウや手法を確立したり、教育や訓練に用いる等の応用が考えられる。
なお、本発明に一部関係すると思われる先行技術文献を、特許文献1に示す。
医療データを活用する具体例としては、医療行為をデータ化し、成功例と失敗例とで分類し、そのデータの推移を見ることで、ノウハウや手法を確立したり、教育や訓練に用いる等の応用が考えられる。
なお、本発明に一部関係すると思われる先行技術文献を、特許文献1に示す。
外科手術の現場では、手術室を無菌状態に保つ必要があることと、執刀医の精神的負担の面から、カメラによる動画撮影が嫌われる傾向にある。
従来の技術では、カメラ以外に執刀医の医療行為を観察する手段が確立されておらず、事実上、医療行為のデータ化が実現されていない。
従来の技術では、カメラ以外に執刀医の医療行為を観察する手段が確立されておらず、事実上、医療行為のデータ化が実現されていない。
本発明はかかる点に鑑みてなされたものであり、外科手術に臨む執刀医の手技をデータに変換して記録するための手袋と、これを用いた手技記録再生装置を提供することを目的とする。
上記課題を解決するために、本発明の手袋は、手に接触する第一層ゴム膜と、第一層ゴム膜上の、手指の屈曲箇所に貼付される複数の屈曲センサとを備える。
また、上記課題を解決するために、本発明の手技記録再生装置は、手に接触する第一層ゴム膜と、第一層ゴム膜上の、手指の屈曲箇所に貼付される複数の屈曲センサとを備える手袋の、複数の屈曲センサに接続され、複数の屈曲センサから得られる電気信号をデータ化するA/D変換部と、時刻情報を発生するリアルタイムクロックと、A/D変換部から得られるデータを時刻情報と共に所定の記録媒体に記録する記録部と、記録媒体に記録されたデータを時刻情報に基づいて再生する再生部とを備える。
手術用手袋の手指の関節に相当する箇所に、屈曲状態を電気信号に変換するセンサを貼付する。センサの出力信号をデータ化し、無線通信等でパソコン等よりなる記録再生装置に記録する。
本発明により、外科手術に臨む執刀医の手技をデータに変換して記録するための手袋と、これを用いた手技データの記録装置を提供できる。
以下、本発明の実施の形態を、図1〜図9を参照して説明する。
図1は、本実施形態の例である、手術用手袋及び手技記録再生装置の外観図である。
執刀医102は、手術に先立って、手術用手袋103と送信機104を装着する。手術用手袋103はブレスレット形状の送信機104に接続されている。
送信機104は、手術用手袋103に埋め込まれているセンサが発する信号をデータに変換し、これを変調した電波を手技記録再生装置105に送信する。
手技記録再生装置105は、一例としてはノート型パソコンで構成され、受信した電波を復調し、データを時間情報と共に記録する。
執刀医102は、手術に先立って、手術用手袋103と送信機104を装着する。手術用手袋103はブレスレット形状の送信機104に接続されている。
送信機104は、手術用手袋103に埋め込まれているセンサが発する信号をデータに変換し、これを変調した電波を手技記録再生装置105に送信する。
手技記録再生装置105は、一例としてはノート型パソコンで構成され、受信した電波を復調し、データを時間情報と共に記録する。
図2は、本実施形態の例である、手術用手袋103の外観図である。
手術用手袋103は、二層構造のゴム手袋で、外側の層と内側の層との間の、手の指等の関節の箇所に、屈曲センサが埋め込まれている。
具体的には、親指第一関節、親指第二関節、
人差し指第一関節、人差し指第二関節、人差し指第三関節、
中指第一関節、中指第二関節、中指第三関節、
薬指第一関節、薬指第二関節、薬指第三関節、
小指第一関節、小指第二関節、小指第三関節、
親指第二関節と人差し指第三関節との間及び手首に、合計16個の屈曲センサが、ケーブルともいえる骨格形状のフレキシブルプリント基板202上に貼付された状態で、手術用手袋103の手の甲に相当する箇所に埋め込まれている。以下、これらのセンサをそれぞれ、
親指第一関節センサ203、親指第二関節センサ204、
人差し指第一関節センサ205、人差し指第二関節センサ206、人差し指第三関節センサ207、
中指第一関節センサ208、中指第二関節センサ209、中指第三関節センサ210、
薬指第一関節センサ211、薬指第二関節センサ212、薬指第三関節センサ213、
小指第一関節センサ214、小指第二関節センサ215、小指第三関節センサ216、
親指人差し指間隔センサ217及び手首センサ218と呼ぶ。
手術用手袋103は、二層構造のゴム手袋で、外側の層と内側の層との間の、手の指等の関節の箇所に、屈曲センサが埋め込まれている。
具体的には、親指第一関節、親指第二関節、
人差し指第一関節、人差し指第二関節、人差し指第三関節、
中指第一関節、中指第二関節、中指第三関節、
薬指第一関節、薬指第二関節、薬指第三関節、
小指第一関節、小指第二関節、小指第三関節、
親指第二関節と人差し指第三関節との間及び手首に、合計16個の屈曲センサが、ケーブルともいえる骨格形状のフレキシブルプリント基板202上に貼付された状態で、手術用手袋103の手の甲に相当する箇所に埋め込まれている。以下、これらのセンサをそれぞれ、
親指第一関節センサ203、親指第二関節センサ204、
人差し指第一関節センサ205、人差し指第二関節センサ206、人差し指第三関節センサ207、
中指第一関節センサ208、中指第二関節センサ209、中指第三関節センサ210、
薬指第一関節センサ211、薬指第二関節センサ212、薬指第三関節センサ213、
小指第一関節センサ214、小指第二関節センサ215、小指第三関節センサ216、
親指人差し指間隔センサ217及び手首センサ218と呼ぶ。
人差し指第三関節と中指第三関節、中指第三関節と薬指第三関節、薬指第三関節と小指第三関節との間には、フレキシブルプリント基板202のベースフィルムで一体的に構成される、間隔を維持するためのステー219が設けられている。これは手袋の製造工程の際、センサ基板をばらけ難くし、センサ基板の形状の安定性を向上させるためにある。
親指第二関節と人差し指第三関節の間に設けられている、親指人差し指間隔センサ217は、親指が開いた状態で標準状態となる、「く」の字形状の屈曲センサである。この親指人差し指間隔センサ217は、親指と人差し指が閉じると屈曲し、その際に電荷を発生する。
親指第二関節と人差し指第三関節の間に設けられている、親指人差し指間隔センサ217は、親指が開いた状態で標準状態となる、「く」の字形状の屈曲センサである。この親指人差し指間隔センサ217は、親指と人差し指が閉じると屈曲し、その際に電荷を発生する。
親指第一関節センサ203から手首センサ218を構成する屈曲センサはピエゾフィルムで構成されている。標準の状態から力が加わって屈曲すると、その際の速度に応じた電荷が発生する。電荷の発生によって生じる電圧は、屈曲の加速度を表す。
各センサを接続するフレキシブルプリント基板202の一端は、平板形状の端子220が設けられている。この端子220には、ブレスレット形状の送信機104が接続される。
施術者は、送信機104を手首に装着した後、手術用手袋103を嵌め、端子220を送信機104のコネクタ口221に差し込む。
施術者は、送信機104を手首に装着した後、手術用手袋103を嵌め、端子220を送信機104のコネクタ口221に差し込む。
手術用手袋103の製造工程は、二層のゴム手袋を作る間に、フレキシブルプリント基板202を手の甲の部分に貼り付ける作業を付加することで実現できる。以下、製造工程の一例を記す。
(1)手型に凝固材を付着させる。
(2)手型をゴムラテックス槽に漬け込む。
ゴムラテックスに用いるゴム材料は、天然ゴム(NR)、アクリロニトリル−ブタジエンゴム(NBR)、スチレン−ブタジエンゴム(SBR)、メタクリル酸エチルグラフト重合体(MG)等の、従来公知の種々のゴムが挙げられる。
(3)手型をゴムラテックス槽から引き出す。
(4)手型の甲に、センサが配線されたフレキシブルプリント基板202を貼り付ける。
(5)手型を加硫剤を含有するゴムラテックス槽に漬け込む。
(6)手型をゴムラテックス槽から引き出す。
(1)手型に凝固材を付着させる。
(2)手型をゴムラテックス槽に漬け込む。
ゴムラテックスに用いるゴム材料は、天然ゴム(NR)、アクリロニトリル−ブタジエンゴム(NBR)、スチレン−ブタジエンゴム(SBR)、メタクリル酸エチルグラフト重合体(MG)等の、従来公知の種々のゴムが挙げられる。
(3)手型をゴムラテックス槽から引き出す。
(4)手型の甲に、センサが配線されたフレキシブルプリント基板202を貼り付ける。
(5)手型を加硫剤を含有するゴムラテックス槽に漬け込む。
(6)手型をゴムラテックス槽から引き出す。
上記製造工程のうち、乾燥工程は省略している。手袋を形成する際に、必要に応じて各工程の間に実行される。重要なことは、本実施形態の手術用手袋103は、ゴムが二層設けられている、という点である。
上記の製造工程は、特許文献1を一部参照している。勿論、製造工程は上記に限られるものではなく、手袋を製造する際に、ゴムを二層設け、その製造工程の間に、センサが配線されたフレキシブルプリント基板202を貼り付ける工程を追加すればよい。
なお、上記(4)の工程は、ゴムが固化する直前の、ゴム自体の粘着力でフレキシブルプリント基板202を貼り付けると、フレキシブルプリント基板202をゴム手袋に貼り付けるために接着剤を用いる必要がなくなると共に、手袋の薄さを確保する点でも好ましい。
更に、上記(5)の工程は、ゴム手袋の指の部分の薄さを確保するため、手の甲の部分だけをゴムラテックス槽に漬け込んでもよい。
更に、上記(5)の工程は、ゴム手袋の指の部分の薄さを確保するため、手の甲の部分だけをゴムラテックス槽に漬け込んでもよい。
前述の製造工程で判るように、手術用手袋103は二層構造である。
図3は、手術用手袋103の一部の断面図である。図1のA−A’の線で見た状態を示す。
第一層ゴム膜302は、前述の製造工程の(2)及び(3)で形成される、ゴムの膜である。
第二層ゴム膜303は、前述の製造工程の(5)及び(6)で形成される、ゴムの膜である。
図3を見て判るように、フレキシブルプリント基板202と、人差し指第一関節船さ205は、第一層ゴム膜302と第二層ゴム膜303の間に挟まれている。
図3は、手術用手袋103の一部の断面図である。図1のA−A’の線で見た状態を示す。
第一層ゴム膜302は、前述の製造工程の(2)及び(3)で形成される、ゴムの膜である。
第二層ゴム膜303は、前述の製造工程の(5)及び(6)で形成される、ゴムの膜である。
図3を見て判るように、フレキシブルプリント基板202と、人差し指第一関節船さ205は、第一層ゴム膜302と第二層ゴム膜303の間に挟まれている。
第一層ゴム膜302は、フレキシブルプリント基板202が存在することによって生じる、手袋装着者が感じる違和感を軽減するために設けられている。
第二層ゴム膜303は、フレキシブルプリント基板202が外気に露出することによって生じる、衛生面の懸念を除去するために設けられている。
以上のように、手術用手袋103でゴムを二層設ける理由は、夫々の層によって異なる。
第二層ゴム膜303は、フレキシブルプリント基板202が外気に露出することによって生じる、衛生面の懸念を除去するために設けられている。
以上のように、手術用手袋103でゴムを二層設ける理由は、夫々の層によって異なる。
周知の如く、手術用手袋103は衛生のため、基本的に使い捨てのものである。しかし、上述の製造工程を経てフレキシブルプリント基板202が埋め込まれた手術用手袋103の、フレキシブルプリント基板202を捨てるのはコスト面で好ましくない。そこで、使用後は手術用手袋103を製造する業者に引き渡すことが、資源再利用等の点で好ましい。業者は、手術用手袋103の、第二層ゴム膜303の手の甲の部分を剥ぎ取る等の処理を経て、フレキシブルプリント基板202を取り出し、これを再利用する。
図4は、送信機104のブロック図である。
親指第一関節センサ203から手首センサ218を構成する屈曲センサの各々の出力信号は、16チャンネルのA/D変換器402に接続される。A/D変換器402は、屈曲センサの数の分、つまり16チャンネルのデータを出力する。
時分割多重処理部403はマイコンよりなり、A/D変換器402の出力データを、後続の送信部404が扱い易いシリアルデータに変換する。
送信部404はBlueTooth(登録商標)等の近距離無線通信によるデータ通信のインターフェースを構成する。時分割多重処理部403から得られるシリアルデータに所定の変調処理を施し、後述するパソコンよりなる手技記録再生装置105に送信する。
親指第一関節センサ203から手首センサ218を構成する屈曲センサの各々の出力信号は、16チャンネルのA/D変換器402に接続される。A/D変換器402は、屈曲センサの数の分、つまり16チャンネルのデータを出力する。
時分割多重処理部403はマイコンよりなり、A/D変換器402の出力データを、後続の送信部404が扱い易いシリアルデータに変換する。
送信部404はBlueTooth(登録商標)等の近距離無線通信によるデータ通信のインターフェースを構成する。時分割多重処理部403から得られるシリアルデータに所定の変調処理を施し、後述するパソコンよりなる手技記録再生装置105に送信する。
図5は、手技記録再生装置105のブロック図である。
近距離無線通信のインターフェースを構成する受信部502は、送信機104から送信される16チャンネル分のデータが変調された電波をアンテナ503を通じて受信し、復調し、デコードする。
記録部504は受信部502から出力される16チャンネル分のデータをファイルシステム505に記録する。
ファイルシステム505は周知のOSより提供される機能であり、ハードディスク等の不揮発性ストレージにデータファイル等を形成し、データの読み書きを実現する。
再生及びデータ処理部506は、ファイルシステム505に記録されたデータファイルを読み出し、所定のデータ処理を施す。
表示処理部507は、再生及びデータ処理部506によって再生されたデータを見やすいグラフ形式に変換する。
表示部508は、LCD等のディスプレイである。
近距離無線通信のインターフェースを構成する受信部502は、送信機104から送信される16チャンネル分のデータが変調された電波をアンテナ503を通じて受信し、復調し、デコードする。
記録部504は受信部502から出力される16チャンネル分のデータをファイルシステム505に記録する。
ファイルシステム505は周知のOSより提供される機能であり、ハードディスク等の不揮発性ストレージにデータファイル等を形成し、データの読み書きを実現する。
再生及びデータ処理部506は、ファイルシステム505に記録されたデータファイルを読み出し、所定のデータ処理を施す。
表示処理部507は、再生及びデータ処理部506によって再生されたデータを見やすいグラフ形式に変換する。
表示部508は、LCD等のディスプレイである。
制御部509には、キーボード及びマウス等のポインティングデバイスよりなる操作部510が接続されている。
制御部509は、受信部502、記録部504、ファイルシステム505、再生及びデータ処理部506及び表示処理部507を制御する。
また、制御部509にはリアルタイムクロック511が接続されており、記録部504によってファイルシステム505に記録されるデータに、時間情報を付加する。
制御部509は、受信部502、記録部504、ファイルシステム505、再生及びデータ処理部506及び表示処理部507を制御する。
また、制御部509にはリアルタイムクロック511が接続されており、記録部504によってファイルシステム505に記録されるデータに、時間情報を付加する。
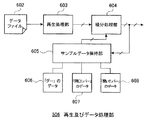
図6は、再生及びデータ処理部506のブロック図である。
ファイルシステム505に格納されているデータファイル602から読み出されたセンサのデータは、再生処理部603によって読み出される。読み出されたセンサのデータは、積分処理部604にて二回積分が行われる。
積分処理部604は、手術用手袋103に仕込まれた屈曲センサを通じて、指の各関節の屈曲角(屈曲状態)のデータを出力する。つまり、手の状態を再現するデータを生成する。その際、サンプルデータ保持部605によって保持されている、「グー」のデータ606、「閉じたパー」のデータ607及び「開いたパー」のデータ608を、初期値として採用する。
ファイルシステム505に格納されているデータファイル602から読み出されたセンサのデータは、再生処理部603によって読み出される。読み出されたセンサのデータは、積分処理部604にて二回積分が行われる。
積分処理部604は、手術用手袋103に仕込まれた屈曲センサを通じて、指の各関節の屈曲角(屈曲状態)のデータを出力する。つまり、手の状態を再現するデータを生成する。その際、サンプルデータ保持部605によって保持されている、「グー」のデータ606、「閉じたパー」のデータ607及び「開いたパー」のデータ608を、初期値として採用する。
図7は、表示処理部507のブロック図である。
積分処理部604から出力された、指の各関節の屈曲角のデータは、手技シミュレーション処理部702とグラフ表示処理部703に供給される。
手技シミュレーション処理部702は、入力される指の各関節の屈曲角のデータを基に、手の画像データを作成する。
グラフ表示処理部703は、入力される指の各関節の屈曲角のデータを基に、グラフを作成する。
画像合成部704は、手の画像データとグラフを一画面上に合成したビデオ信号を作成し、表示部508に出力する。なお、制御部509から与えられる種々の情報も合成する。
積分処理部604から出力された、指の各関節の屈曲角のデータは、手技シミュレーション処理部702とグラフ表示処理部703に供給される。
手技シミュレーション処理部702は、入力される指の各関節の屈曲角のデータを基に、手の画像データを作成する。
グラフ表示処理部703は、入力される指の各関節の屈曲角のデータを基に、グラフを作成する。
画像合成部704は、手の画像データとグラフを一画面上に合成したビデオ信号を作成し、表示部508に出力する。なお、制御部509から与えられる種々の情報も合成する。
図8(a)、(b)及び(c)は、サンプルデータを入力する際の、手の形を示す図である。
施術者は、手術用手袋103を装着した状態で、最初に図7に示す手の状態を実行し、それぞれおよそ5秒程度静止する。手技記録再生装置105はこの状態のデータを記録する。
手技記録再生装置105は、データの再生に先立ち、制御部509でサンプルデータ保持部605を制御し、「グー」のデータ606、「閉じたパー」のデータ607及び「開いたパー」のデータ608を、初期値として保存する。
施術者は、手術用手袋103を装着した状態で、最初に図7に示す手の状態を実行し、それぞれおよそ5秒程度静止する。手技記録再生装置105はこの状態のデータを記録する。
手技記録再生装置105は、データの再生に先立ち、制御部509でサンプルデータ保持部605を制御し、「グー」のデータ606、「閉じたパー」のデータ607及び「開いたパー」のデータ608を、初期値として保存する。
積分処理部604では、関節の動きの加速度を示すデータを、関節の角度のデータに変換するため、二回積分を実行する。積分を実行する際、定数項である初期値を与える必要がある。そこで、手を構成する各関節が最も極端な状態の時点のデータ、つまり関節が最も曲がった状態及び最も伸びきった状態のデータを、予め保持しておく。これが、サンプルデータ保持部605によって保持される、「グー」のデータ606、「閉じたパー」のデータ607及び「開いたパー」のデータ608である。
「グー」のデータ606、「閉じたパー」のデータ607及び「開いたパー」のデータ608は、手技記録再生装置105の図示しないRAM或はファイルシステム505に保持される。
「グー」のデータ606、「閉じたパー」のデータ607及び「開いたパー」のデータ608は、手技記録再生装置105の図示しないRAM或はファイルシステム505に保持される。
図9は、表示部508に表示される表示画面の一例である。
表示画面901の左側には、手表示領域902が設けられている。手表示領域902の中には、手技シミュレーション処理部702によって描画された手903が表示されている。手の関節の角度は積分処理部604の演算によって得られた角度で構成されている。
表示画面901の右側には、グラフ表示領域904が設けられている。グラフ表示領域904の中には、グラフ表示処理部703によって描画されたグラフ905が表示されている。各々のグラフは、横軸が時間軸であり、縦軸は各々のセンサから得られたデータを基に、積分処理部604の演算によって得られた角度を示している。また、グラフ905の中心には現在時間を示すカーソル906が描かれている。
表示画面901の左側には、手表示領域902が設けられている。手表示領域902の中には、手技シミュレーション処理部702によって描画された手903が表示されている。手の関節の角度は積分処理部604の演算によって得られた角度で構成されている。
表示画面901の右側には、グラフ表示領域904が設けられている。グラフ表示領域904の中には、グラフ表示処理部703によって描画されたグラフ905が表示されている。各々のグラフは、横軸が時間軸であり、縦軸は各々のセンサから得られたデータを基に、積分処理部604の演算によって得られた角度を示している。また、グラフ905の中心には現在時間を示すカーソル906が描かれている。
本実施形態には、以下のような応用例が考えられる。
(1)手指の関節にセンサを埋め込むだけでなく、指先にセンサを埋め込むことも可能である。つまり、指がメス等の器具を掴む際の、握力等を記録する。この情報を記録することで、記録対象者である執刀医102或は執刀模擬試験等の被験者がどれだけ施術の際に力を加えているのかが判る。また、力を検出することは、脈拍も混入することから、記録対象者の脈拍を推測することもできる。
(1)手指の関節にセンサを埋め込むだけでなく、指先にセンサを埋め込むことも可能である。つまり、指がメス等の器具を掴む際の、握力等を記録する。この情報を記録することで、記録対象者である執刀医102或は執刀模擬試験等の被験者がどれだけ施術の際に力を加えているのかが判る。また、力を検出することは、脈拍も混入することから、記録対象者の脈拍を推測することもできる。
(2)手技記録再生装置105に記録されるデータは、時間軸上の情報である。この情報をフーリエ変換すると、手指の動作の周波数スペクトルを得ることができる。フーリエ変換を施すことで、施術者或は執刀模擬試験等の被験者がどれだけ緊張しているのかを推測することができる。
更に、前述の(1)に記したように、指先にもセンサを埋め込み、得られた情報をフーリエ変換すると、記録対象者の脈拍に相当する周波数も判別できるので、記録対象者の緊張の度合いをより客観的に推測することが可能になる。
更に、前述の(1)に記したように、指先にもセンサを埋め込み、得られた情報をフーリエ変換すると、記録対象者の脈拍に相当する周波数も判別できるので、記録対象者の緊張の度合いをより客観的に推測することが可能になる。
(3)執刀医の、手術用器具の使用状態を同時に記録することで、執刀医の作業内容がより明確に判るようになる。
具体的には、手術用器具にRFIDタグを貼付し、執刀医の手首にブレスレット形状の通信機を装着させる。通信機は、近接している手術用器具のRFIDタグと通信を行い、記憶されているIDを記録再生装置へ近距離無線インターフェースで送信する。
図9で示した、手技シミュレーション処理部702に手術用器具の情報を追加することで、表示画面901の手表示領域902に、執刀医が使用している手術用器具を含めた描画も可能になる。
つまり、執刀医の手の動作と、執刀医が使用している手術用器具の情報を組み合わせ、所定のシミュレーション演算を実行することで、ビデオカメラを用いずに施術の動作をデータ化し、表示画面上に再現することが可能になる。
具体的には、手術用器具にRFIDタグを貼付し、執刀医の手首にブレスレット形状の通信機を装着させる。通信機は、近接している手術用器具のRFIDタグと通信を行い、記憶されているIDを記録再生装置へ近距離無線インターフェースで送信する。
図9で示した、手技シミュレーション処理部702に手術用器具の情報を追加することで、表示画面901の手表示領域902に、執刀医が使用している手術用器具を含めた描画も可能になる。
つまり、執刀医の手の動作と、執刀医が使用している手術用器具の情報を組み合わせ、所定のシミュレーション演算を実行することで、ビデオカメラを用いずに施術の動作をデータ化し、表示画面上に再現することが可能になる。
本実施形態においては、手術用手袋103及び手技記録再生装置105を開示した。
従来の手術用手袋103に、関節の屈曲状態を検出する屈曲センサを埋め込み、屈曲センサの出力信号を近距離無線通信インターフェースを介して、時間情報と共に記録する。記録されたデータを再生する際、屈曲センサのデータを二回積分して角度情報に変換することで、手指の動きを再現することができる。
上述の通り、本実施形態の手術用手袋103及び手技記録再生装置105は、ビデオカメラを使わずに外科手術の手技を記録することができる。したがって、執刀医102は「見られている」という精神的圧迫感を感じることなく、施術に専念できる。
従来の手術用手袋103に、関節の屈曲状態を検出する屈曲センサを埋め込み、屈曲センサの出力信号を近距離無線通信インターフェースを介して、時間情報と共に記録する。記録されたデータを再生する際、屈曲センサのデータを二回積分して角度情報に変換することで、手指の動きを再現することができる。
上述の通り、本実施形態の手術用手袋103及び手技記録再生装置105は、ビデオカメラを使わずに外科手術の手技を記録することができる。したがって、執刀医102は「見られている」という精神的圧迫感を感じることなく、施術に専念できる。
更に、本実施形態の手術用手袋103及び手技記録再生装置105を用いて、熟達した執刀医102から予め「お手本」となるデータを記録して保存しておき、これを模倣することで、新人外科医等の執刀の訓練にも活用できる。
以上、本発明の実施形態例について説明したが、本発明は上記実施形態例に限定されるものではなく、特許請求の範囲に記載した本発明の要旨を逸脱しない限りにおいて、他の変形例、応用例を含む。
102…執刀医、103…手術用手袋、104…送信機、105…手技記録再生装置、202…フレキシブルプリント基板、203…親指第一関節センサ、204…親指第二関節センサ、205…人差し指第一関節センサ、206…人差し指第二関節センサ、207…人差し指第三関節センサ、208…中指第一関節センサ、209…中指第二関節センサ、210…中指第三関節センサ、211…薬指第一関節センサ、212…薬指第二関節センサ、213…薬指第三関節センサ、214…小指第一関節センサ、215…小指第二関節センサ、216…小指第三関節センサ、217…親指人差し指間隔センサ、218…手首センサ、219…ステー、220…端子、221…コネクタ口、302…第一層ゴム膜、303…第二層ゴム膜、402…A/D変換器、403…時分割多重処理部、404…送信部、502…受信部、503…アンテナ、504…記録部、505…ファイルシステム、506…再生及びデータ処理部、507…表示処理部、508…表示部、509…制御部、510…操作部、511…リアルタイムクロック、602…データファイル、603…再生処理部、604…積分処理部、605…サンプルデータ保持部、606…「グー」のデータ、607…「閉じたパー」のデータ、608…「開いたパー」のデータ、702…手技シミュレーション処理部、703…グラフ表示処理部、704…画像合成部、901…表示画面、902…手表示領域、903…手、904…グラフ表示領域、905…グラフ、906…カーソル
Claims (3)
- 手に接触する第一層ゴム膜と、
前記第一層ゴム膜上の、手指の屈曲箇所に貼付される複数の屈曲センサと
を備える手袋。 - 更に、
前記複数の屈曲センサから得られる電気信号を伝達するケーブルと、
前記第一層ゴム膜、前記屈曲センサ及び前記ケーブルを覆う第二層ゴム膜と
を備える、請求項1記載の手袋。 - 手に接触する第一層ゴム膜と、前記第一層ゴム膜上の、手指の屈曲箇所に貼付される複数の屈曲センサとを備える手袋の、前記複数の屈曲センサに接続され、前記複数の屈曲センサから得られる電気信号をデータ化するA/D変換部と、
時刻情報を発生するリアルタイムクロックと、
前記A/D変換部から得られるデータを前記時刻情報と共に所定の記録媒体に記録する記録部と、
前記記録媒体に記録されたデータを前記時刻情報に基づいて再生する再生部と
を備える手技記録再生装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009054198A JP2010207292A (ja) | 2009-03-06 | 2009-03-06 | 手袋及び手技記録再生装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2009054198A JP2010207292A (ja) | 2009-03-06 | 2009-03-06 | 手袋及び手技記録再生装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2010207292A true JP2010207292A (ja) | 2010-09-24 |
Family
ID=42968153
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2009054198A Pending JP2010207292A (ja) | 2009-03-06 | 2009-03-06 | 手袋及び手技記録再生装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2010207292A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012120583A (ja) * | 2010-12-06 | 2012-06-28 | Nihon Vinyl Cord Kk | 造影剤注入装置及び造影剤注入装置の動作方法 |
| DE112010003825T5 (de) | 2009-09-28 | 2012-07-12 | Hitachi Automotive Systems, Ltd. | Scheibenbremse |
| JP2016069761A (ja) * | 2014-09-30 | 2016-05-09 | 国立大学法人大阪大学 | 電極付きゴム手袋とその製造方法、及び電極付きゴム手袋の製造用手型 |
| JP7481783B1 (ja) | 2023-01-05 | 2024-05-13 | Diver-X株式会社 | 位置検出装置及び情報処理システム |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0315447A (ja) * | 1989-06-13 | 1991-01-23 | Yaskawa Electric Mfg Co Ltd | ヒユーマンモーシヨンセンシング装置 |
| JPH10176919A (ja) * | 1996-12-18 | 1998-06-30 | Olympus Optical Co Ltd | 形状入力装置 |
| US6725729B1 (en) * | 1999-04-29 | 2004-04-27 | Alberto Cimmino | Electronic transducer for measuring flexion |
-
2009
- 2009-03-06 JP JP2009054198A patent/JP2010207292A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0315447A (ja) * | 1989-06-13 | 1991-01-23 | Yaskawa Electric Mfg Co Ltd | ヒユーマンモーシヨンセンシング装置 |
| JPH10176919A (ja) * | 1996-12-18 | 1998-06-30 | Olympus Optical Co Ltd | 形状入力装置 |
| US6725729B1 (en) * | 1999-04-29 | 2004-04-27 | Alberto Cimmino | Electronic transducer for measuring flexion |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE112010003825T5 (de) | 2009-09-28 | 2012-07-12 | Hitachi Automotive Systems, Ltd. | Scheibenbremse |
| JP2012120583A (ja) * | 2010-12-06 | 2012-06-28 | Nihon Vinyl Cord Kk | 造影剤注入装置及び造影剤注入装置の動作方法 |
| JP2016069761A (ja) * | 2014-09-30 | 2016-05-09 | 国立大学法人大阪大学 | 電極付きゴム手袋とその製造方法、及び電極付きゴム手袋の製造用手型 |
| JP7481783B1 (ja) | 2023-01-05 | 2024-05-13 | Diver-X株式会社 | 位置検出装置及び情報処理システム |
| WO2024147180A1 (ja) * | 2023-01-05 | 2024-07-11 | Diver-X株式会社 | 位置検出装置及び情報処理システム |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20240126504A1 (en) | Voice assistant for wireless earpieces | |
| US11508344B2 (en) | Information processing device, information processing method and program | |
| JP5175846B2 (ja) | 血流力学パラメータを非侵襲的に測定するための装置及び方法 | |
| US20130335226A1 (en) | Earphone-Based Game Controller and Health Monitor | |
| JP3829197B2 (ja) | 聴診教育用装置 | |
| KR20200123796A (ko) | 무선 의료 센서 및 방법 | |
| CN107427239A (zh) | 将压力换能到非侵入性脉搏的传感器 | |
| US20060227979A1 (en) | Contact type electronic stethoscope with a noise interference resisting function for auscultation | |
| WO2012121260A1 (ja) | 装身機器、生体ガス測定装置及び方法 | |
| WO2005125002A3 (en) | Low-cost hearing testing system and method of collecting user information | |
| JP2013172968A (ja) | 片持ち梁型生体音響センサー及びそのセンサーを使用した方法 | |
| US10698983B2 (en) | Wireless earpiece with a medical engine | |
| JP2010207292A (ja) | 手袋及び手技記録再生装置 | |
| JP2008544585A (ja) | 聴診器付き携帯電話機 | |
| CN103826683A (zh) | 用于产房的呼吸引导设备 | |
| CN109640804A (zh) | 使用活性材料的血压装置及相关方法 | |
| JP2020156624A (ja) | デジタル聴診器を用いた遠隔診療システム | |
| JP2019130602A (ja) | 情報処理装置、情報処理方法、及びプログラム | |
| WO2016026028A1 (en) | A device, system, method, and/or computer readable medium for use with biological and nonbiological data | |
| JP2008142112A (ja) | 生体音センサ | |
| US20180139528A1 (en) | Sensible Wired Earphones | |
| CN115884709A (zh) | 通过分析数字听诊器所生成的音频数据得出对健康的洞察 | |
| CN109497965A (zh) | 一种脉象传输及还原方法 | |
| US11998305B2 (en) | Systems and methods for using a wearable health monitor | |
| JP6836877B2 (ja) | 吹奏楽器の練習支援装置及び練習支援方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20120215 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20130515 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130521 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20131001 |