JP2010142260A - Vacuum cleaner - Google Patents
Vacuum cleaner Download PDFInfo
- Publication number
- JP2010142260A JP2010142260A JP2008319239A JP2008319239A JP2010142260A JP 2010142260 A JP2010142260 A JP 2010142260A JP 2008319239 A JP2008319239 A JP 2008319239A JP 2008319239 A JP2008319239 A JP 2008319239A JP 2010142260 A JP2010142260 A JP 2010142260A
- Authority
- JP
- Japan
- Prior art keywords
- vacuum cleaner
- grounding
- suction tool
- electric blower
- mode
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Abstract
Description
本発明は、電気掃除機に関するもので、特に、電力消費を低減できる電気掃除機に関するものである。 The present invention relates to a vacuum cleaner, and more particularly to a vacuum cleaner that can reduce power consumption.
従来、この種の電気掃除機としては、電気掃除機本体に電動送風機を備え、この電気掃除機本体にホースなどを介して、電動送風機により発生する吸気により塵埃を吸い込む吸込み具を接続し、この吸込み具には回転ブラシおよびこの回転ブラシを回転駆動する電動機が設けられるとともに、電気掃除機本体から吸込み具の電動機へは電源供給線が設けられ、この電源供給線にはスイッチ手段が設けられ、前記スイッチ手段は、吸込み具が被掃除面に接地されると閉成し、被掃除面に接地されていないときは開成する構成としている。 Conventionally, as this type of vacuum cleaner, an electric blower is provided in the main body of the vacuum cleaner, and a suction tool for sucking dust by the intake air generated by the electric blower is connected to the main body of the vacuum cleaner through a hose, etc. The suction tool is provided with a rotary brush and an electric motor for rotating the rotary brush, a power supply line is provided from the vacuum cleaner body to the motor of the suction tool, and a switch means is provided on the power supply line. The switch means is closed when the suction tool is grounded to the surface to be cleaned, and is opened when the suction device is not grounded to the surface to be cleaned.
そして、スイッチ手段が閉成されている状態であると電動機が駆動され、スイッチ手段が開成されていない状態であると吸込み具の電動機が停止する。 The motor is driven when the switch means is closed, and the motor of the suction tool is stopped when the switch means is not opened.
また、吸込み具が被掃除面に接地されているか否かを検出する接地検出手段を有し、接地検出手段で吸込み具が被掃除面に接地されていない状態を検出すると、電動機を停止するのみならず、吸込み具が被掃除面から離れた状態では、掃除をしていない状態であるので、電動送風機の出力は必要なく、省電力および静音化のために、電動送風機の出力を低下あるいは停止させるようにした電気掃除機もある(例えば、特許文献1参照)。 In addition, it has a grounding detecting means for detecting whether or not the suction tool is grounded to the surface to be cleaned, and when the grounding detection means detects that the suction tool is not grounded to the surface to be cleaned, it only stops the motor. However, when the suction tool is away from the surface to be cleaned, it is not cleaned, so the output of the electric blower is not necessary, and the output of the electric blower is reduced or stopped for power saving and noise reduction. There is also an electric vacuum cleaner which is made to perform (for example, refer to patent documents 1).
また、スイッチ手段が閉成した状態で接地検出手段が、吸込み具が被掃除面に接地していないことを検出し、再び吸込み具が被掃除面に接地していることを検出した後は、吸込み具が被掃除面に接地していないことを検出すると電動送風機の駆動状態をより低い駆動状態にするようにした電気掃除機もある(例えば、特許文献2参照)。 In addition, after the switch means is closed, the ground detection means detects that the suction tool is not grounded on the surface to be cleaned, and again detects that the suction tool is grounded on the surface to be cleaned. There is also an electric vacuum cleaner in which the driving state of the electric blower is set to a lower driving state when it is detected that the suction tool is not grounded to the surface to be cleaned (for example, see Patent Document 2).
これは、接地検出手段は、吸込み具に設けられるものであるので、電動機の付いていない吸込み具を装着した場合や、吸込み具を装着しないで電気掃除機を使用する場合、電動送風機の出力を制御する制御手段には、接地されている状態の信号が入力されないため、掃除をしている状態にも関わらず、電動送風機の出力が低下してしまうことを防止するもので、接地検出手段が出力する信号が、吸込み具が被掃除面に接地していない状態から、接地している状態に変化することを確認することにより、接地検出手段が設けられている電動機を備えた吸込み具が装着されているかどうかを判断し、電動機を備えた吸込み具が装着されている時のみ、電動送風機の出力の低下を許可できるようにしたもので、しかも、吸込み具の検出のための専用の手段を設けることなく実現できるようにしたものである。
しかしながら前記従来の電気掃除機の構成では、スイッチ手段や接地検出手段が故障し、スイッチ手段の場合は、開成側に固定され、接地検出手段の場合は接地していない状態側へ信号が固定されてしまうと、吸込み具が接地されて実際に被掃除面の掃除を行っているにもかかわらず、電動送風機の出力が低くなるように制御され、十分な集塵力が得られなくなってしまう、という課題を有していた。 However, in the configuration of the conventional vacuum cleaner, the switch means and the ground detection means break down. In the case of the switch means, the signal is fixed to the open side, and in the case of the ground detection means, the signal is fixed to the ungrounded state side. If the suction tool is grounded and the surface to be cleaned is actually being cleaned, the output of the electric blower is controlled to be low, and sufficient dust collecting power cannot be obtained. It had the problem that.
また、上記特許文献2に記載された従来の電気掃除機の構成では、上述した故障が発生した場合、その構成の目的とは無関係に、電動送風機の出力を低くしないよう動作する構成となっているが、故障が解除された後、吸込み具が接地されていない状況になった時に、電動送風機の出力が低い省エネ状態に移行するまでに時間がかかってしまうという課題を有していた。
Moreover, in the structure of the conventional vacuum cleaner described in the said
本発明は、上記従来の課題を解決するもので、スイッチ手段や接地検出手段が故障、または、一時的な動作不具合が発生しても、掃除性能を低下させることなく、かつ、故障がない場合や、一時的な不具合が解除された場合は、素早く、省エネ状態への切り替えが可能な状態に移行でき、掃除性能に悪影響を与えることなく、省エネ性能も向上できる電気掃除機を提供することを目的とする。 The present invention solves the above-described conventional problems, and when the switch means and the ground detection means fail or there is a temporary malfunction, the cleaning performance is not deteriorated and there is no failure. To provide a vacuum cleaner that can quickly shift to an energy-saving state that can be switched to an energy-saving state when the temporary malfunction is resolved, and that can improve the energy-saving performance without adversely affecting the cleaning performance. Objective.
前記従来の課題を解決するために本発明の電気掃除機は、本体に収納され吸込み力を発生する電動送風機と、運転モードを設定する操作部と、被掃除面との接地の有無を検出する接地検出手段を備えた吸込み具と、前記操作部で設定された運転モードに応じた電力を前記電動送風機へ供給する動作モードと電力を供給しない停止モードを有して前記電動送風機を制御する制御手段とを備え、前記制御手段は、前記動作モードで運転中に、前記接地検出手段が前記吸込み具が被掃除面に接地していないことを検出すると前記電動送風機への供給電力を低下、もしくは、停止するスタンバイモードと、前記接地検出手段が被清掃面との接地の有無を正常に検出できるかどうかを判断する検査手段を有すると共に、前記検査手段が前記接地検出手段が接地検出可能であると判断した時のみ、前記電動送風機への供給電力の低下もしくは、停止を行うもので、検査手段は、所定のタイミングで、接地検出手段の出力信号が正常かどうかを確認し、正常である場合は、制御手段はスタンバイモードへの移行を許可し、許可された場合は、例えば、使用者が電気掃除機で床面上等を掃除中に急に他の用事をしなければならなくなって運転したまま(吸込み具が床面に接地しないようにして)放置すると、制御手段は接地検出手段の出力情報から吸込み具が被掃除面に接地していないことを検知して電動送風機の駆動状態を低い状態にするよう制御する。検査手段で、異常と判断された場合は、スタンバイモードへの移行を許可しないように動作するので、制御手段は接地検出手段の出力情報から吸込み具が被掃除面に接地していないことを検出しても、電動送風機への駆動状態を低い状態にすることなく、駆動状態を維持するので、使用者が清掃を行っておらず、掃除を行うための電動送風機の状態が必要でない時は、電動送風機の駆動状態を低くし、省電力及び静音化を実現することができ、接地検出手段に故障等の不具合が発生した場合は、掃除を行わなければならない状況での掃除性能を低下させることがないので、省エネ、静音化と使い勝手を両立させた電気掃除機を実現することができる。 In order to solve the above-described conventional problems, the vacuum cleaner of the present invention detects the presence or absence of grounding between the electric blower housed in the main body and generating suction force, the operation unit for setting the operation mode, and the surface to be cleaned. Control for controlling the electric blower having a suction tool provided with a ground detection means, an operation mode for supplying electric power to the electric blower according to the operation mode set in the operation unit, and a stop mode for not supplying electric power And the control means reduces the power supplied to the electric blower when the ground detection means detects that the suction tool is not grounded on the surface to be cleaned during operation in the operation mode, or A standby mode for stopping, and an inspection unit for determining whether the grounding detection unit can normally detect the presence or absence of grounding with the surface to be cleaned. Only when it is determined that the ground can be detected, the power supplied to the electric blower is reduced or stopped, and the inspection means checks whether the output signal of the ground detection means is normal at a predetermined timing. If it is normal, the control means permits the transition to the standby mode, and if permitted, for example, the user must suddenly perform other tasks while cleaning the floor surface with a vacuum cleaner. If left unattended and operated (with the suction tool not grounded to the floor), the control means detects that the suction tool is not grounded on the surface to be cleaned from the output information of the ground detection means. It controls to make the drive state of a blower into a low state. If the inspection means determines that an abnormality has occurred, it operates so as not to allow the transition to the standby mode, so the control means detects from the output information of the ground detection means that the suction tool is not grounded on the surface to be cleaned. Even so, the driving state is maintained without lowering the driving state to the electric blower, so the user is not cleaning, and when the state of the electric blower for cleaning is not necessary, The drive state of the electric blower can be lowered, power saving and noise reduction can be realized, and when the grounding detection means has a failure such as a failure, the cleaning performance in a situation where cleaning must be performed is reduced. Therefore, it is possible to realize a vacuum cleaner that achieves both energy saving, noise reduction, and usability.
本発明の電気掃除機は、電気掃除機運転中に放置された場合等吸込み具が被掃除面から浮いている状態の時には電動送風機の運転を低い状態にして省電力および静音化が図れると共に、吸込み具が被掃除面から浮いていることを検出する手段が正常であるときのみ、電動送風機の運転を低い状態にするので、接地検出手段に故障等の不具合が発生した場合は、掃除を行わなければならない状況での掃除性能を低下させることなく、省電力及び静音化を実現することができ、また、異常が解除されたときは、素早く省エネ、静音状態に移行することができる、環境配慮と使用者の使い勝手の良さを両立させた電気掃除機を提供できる。 When the vacuum cleaner of the present invention is in a state where the suction tool is floating from the surface to be cleaned, such as when left in operation of the vacuum cleaner, the operation of the electric blower can be reduced to save power and reduce noise, Only when the means for detecting that the suction tool is floating from the surface to be cleaned is normal, the operation of the electric blower is set to a low state. Environmental considerations that can achieve power saving and noise reduction without degrading the cleaning performance in situations where it is necessary, and can quickly shift to the energy saving and silent state when the abnormality is cleared And a vacuum cleaner that balances user-friendliness.
第1の発明は、本体に収納され吸込み力を発生する電動送風機と、運転モードを設定する操作部と、被掃除面との接地の有無を検出する接地検出手段を備えた吸込み具と、前記操作部で設定された運転モードに応じた電力を前記電動送風機へ供給する動作モードと電力を供給しない停止モードを有して前記電動送風機を制御する制御手段とを備え、前記制御手段は、前記動作モードで運転中に、前記接地検出手段が前記吸込み具が被掃除面に接地していないことを検出すると前記電動送風機への供給電力を低下、もしくは、停止するスタンバイモードと、前記接地検出手段が被清掃面との接地の有無を正常に検出できるかどうかを判断する検査手段を有すると共に、前記検査手段が前記接地検出手段が接地検出可能であると判断した時のみ、前記電動送風機への供給電力の低下もしくは、停止を行うもので、検査手段は、所定のタイミングで、接地検出手段の出力信号が正常かどうかを確認し、正常である場合は、制御手段はスタンバイモードへの移行を許可し、許可された場合は、例えば、使用者が電気掃除機で床面上等を掃除中に急に他の用事をしなければならなくなって運転したまま(吸込み具が床面に接地しないようにして)放置すると、制御手段は接地検出手段の出力情報から吸込み具が被掃除面に接地していないことを検知して電動送風機の駆動状態を低い状態にするよう制御する。検査手段で、異常と判断された場合は、スタンバイモードへの移行を許可しないように動作するので、制御手段は接地検出手段の出力情報から吸込み具が被掃除面に接地していないことを検出しても、電動送風機への駆動状態を低い状態にすることなく、駆動状態を維持するので、使用者が清掃を行っておらず、掃除を行うための電動送風機の状態が必要でない時は、電動送風機の駆動状態を低くし、省電力及び静音化を実現することができ、接地検出手段に故障等の不具合が発生した場合は、掃除を行わなければならない状況での掃除性能を低下させることがないので、省エネ、静音化と使い勝手を両立させた電気掃除機を実現することができる。 The first invention is an electric blower that is housed in a main body and generates a suction force, an operation unit that sets an operation mode, and a suction tool that includes a grounding detection unit that detects the presence or absence of grounding of the surface to be cleaned, An operation mode for supplying electric power to the electric blower according to the operation mode set in the operation unit, and a control unit for controlling the electric blower having a stop mode in which no electric power is supplied. During operation in the operation mode, when the grounding detection means detects that the suction tool is not grounded on the surface to be cleaned, the standby mode in which the power supplied to the electric blower is reduced or stopped, and the grounding detection means Has an inspection means for determining whether or not the ground contact with the surface to be cleaned can be normally detected, and only when the inspection means determines that the ground detection means can detect the ground contact, The power supplied to the electric blower is reduced or stopped, and the inspection means checks whether the output signal of the grounding detection means is normal at a predetermined timing. If the mode is allowed, and the user is permitted to do so, for example, the user must suddenly do other things while cleaning the floor with a vacuum cleaner, etc. If left unattended (without grounding to the floor), the control means detects that the suction tool is not grounded on the surface to be cleaned from the output information of the ground detection means, and controls the drive state of the electric blower to be low. To do. If the inspection means determines that an abnormality has occurred, it operates so as not to allow the transition to the standby mode, so the control means detects from the output information of the ground detection means that the suction tool is not grounded on the surface to be cleaned. Even so, the driving state is maintained without lowering the driving state to the electric blower, so the user is not cleaning, and when the state of the electric blower for cleaning is not necessary, The drive state of the electric blower can be lowered, power saving and noise reduction can be realized, and when the grounding detection means has a failure such as a failure, the cleaning performance in a situation where cleaning must be performed is reduced. Therefore, it is possible to realize a vacuum cleaner that achieves both energy saving, noise reduction, and usability.
第2の発明は、特に、第1の発明の検査手段は、停止モードのときに、接地検出手段が接地検出可能かどうかを判断するもので、使用者が掃除を開始する前には、接地検出手段が正常かどうかの判定結果がはっきりしており、使用者の操作により動作モードに移行して掃除を開始すると同時に、素早く、掃除状況に適した電動送風機の駆動状態とすることができる。 In the second invention, in particular, the inspection means of the first invention determines whether or not the grounding detection means can detect grounding in the stop mode. Before the user starts cleaning, the grounding detection means determines whether the grounding detection is possible. The determination result of whether or not the detection means is normal is clear, and the operation mode can be shifted to the operation mode by the user's operation to start cleaning, and at the same time, the electric blower driving state suitable for the cleaning situation can be quickly set.
第3の発明は、特に、第1の発明の検査手段は、停止モードから動作モードに移行する時、もしくは、以降した略直後に、接地検出手段が接地検出可能かどうかを判断するもので、使用者の操作により動作モードに移行して掃除を開始する直前の接地検出手段の状態を判断することができ、掃除中の電動送風機の駆動状態の制御精度を向上させることができる。 In the third invention, in particular, the inspection means of the first invention determines whether or not the ground detection means can detect the ground when shifting from the stop mode to the operation mode or almost immediately thereafter. It is possible to determine the state of the ground contact detection means immediately before starting the cleaning by shifting to the operation mode by the user's operation, and it is possible to improve the control accuracy of the driving state of the electric blower during cleaning.
第4の発明は、特に、第1の発明の検査手段は、動作モードにおいて、所定時間吸込具の接地状態を検出しないと異常と判断するもので、使用者が掃除中に接地検出手段に不具合が発生した場合であっても、検査手段による検査を行え、更に、掃除中の電動送風機の駆動状態の制御精度を向上することができる。 In the fourth aspect of the invention, in particular, the inspection means of the first aspect of the invention determines that it is abnormal unless the grounding state of the suction tool is detected for a predetermined time in the operation mode. Even if this occurs, the inspection by the inspection means can be performed, and further, the control accuracy of the driving state of the electric blower during cleaning can be improved.
第5の発明は、特に、第1〜4のいずれか一つの発明の本体に着脱可能な吸込み用のホースと、一端が前記ホースに、他端が吸込み具にそれぞれ着脱自在に接続される延長管と、前記吸込み具が、前記延長管に接続されているかどうかを検出する着脱検出手段を有し、制御手段が行う前記着脱検出手段の検出情報による判断と、検査手段の検査とを略同時に行い、直後にスタンバイモードへの移行が可能としたもので、検査手段の検査結果が正常である場合は、吸込み具が接続されると、すぐに、スタンバイモードへの移行が可能となり、より、省エネ性を向上することができる。 In particular, the fifth invention is a suction hose that can be attached to and detached from the main body according to any one of the first to fourth inventions, and an extension that is detachably connected to the hose at one end and to the suction tool at the other end. The tube and attachment / detachment detection means for detecting whether or not the suction tool is connected to the extension tube, and the determination by the detection information of the attachment / detachment detection means performed by the control means and the inspection of the inspection means are performed substantially simultaneously. It is possible to shift to standby mode immediately after that, and if the inspection result of the inspection means is normal, as soon as the suction tool is connected, it becomes possible to shift to standby mode, Energy saving can be improved.
第6の発明は、特に、第1〜5のいずれか一つの発明の検査手段が、接地検出手段に異常があると判断した時は、以降、制御手段は、スタンバイモードには移行しないように制御するもので、接地検出手段に不具合が発生しても、電動送風機の駆動状態が低くなることはなく、掃除性能を確保することができる。 In the sixth invention, in particular, when the inspection means of any one of the first to fifth inventions determines that there is an abnormality in the ground detection means, the control means does not shift to the standby mode thereafter. Even if a failure occurs in the ground contact detection means, the driving state of the electric blower is not lowered, and the cleaning performance can be ensured.
第7の発明は、特に、第1〜5のいずれか一つの発明の検査手段が、一旦、接地検出手段に異常があると判断した後に、接地検出可能であると判断した場合、前記異常を解除して、スタンバイモードへの移行を許可するもので、接地検出手段に一時的な不具合が発生した場合は、掃除性能を確保することができるとともに、接地検出手段が正常に検出できるようになった場合は、省エネ、静音運転が可能になるので、省エネ、静音と掃除性能を両立でき、使用性を向上することができる。 In the seventh aspect of the invention, in particular, when the inspection means of any one of the first to fifth aspects of the invention once determines that the ground detection means is abnormal and then determines that the ground detection is possible, the abnormality is detected. It is released and the transition to the standby mode is permitted. When a temporary malfunction occurs in the ground detection means, the cleaning performance can be ensured and the ground detection means can detect normally. In this case, energy saving and silent operation become possible, so that energy saving, noise reduction and cleaning performance can be compatible, and usability can be improved.
以下、本発明の実施の形態について、図面を参照しながら説明する。なお、この実施の形態により本発明が限定されるものではない。 Hereinafter, embodiments of the present invention will be described with reference to the drawings. In addition, this invention is not limited by this embodiment.
(実施の形態1)
以下、本発明の第1の実施の形態における電気掃除機について、図1〜図3を参照しながら説明する。
(Embodiment 1)
Hereinafter, the vacuum cleaner in the 1st Embodiment of this invention is demonstrated, referring FIGS. 1-3.
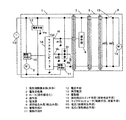
図1は、本実施の形態における電気掃除機の外観図で、図2は、同電気掃除機の回路構成ブロック図を示すものである。 FIG. 1 is an external view of the vacuum cleaner in the present embodiment, and FIG. 2 is a block diagram of a circuit configuration of the vacuum cleaner.
図1において、1は吸引力を発生させる電動送風機2を内蔵する電気掃除機本体(以下「本体1」という)で、使用者が電気掃除機の運転モード(例えば強・中・弱・切等の吸込み力)を設定可能な操作部4をその先端部分に配設したホース3が着脱可能に接続され、前記ホース3の先端部には、延長管5、更に前記延長管5の先端には、被掃除面に接触して塵埃を吸引可能な床用吸込み具6(以下、「吸込み具6」という)が同じく着脱自在に接続されている。
In FIG. 1, 1 is an electric vacuum cleaner main body (hereinafter referred to as “main body 1”) that incorporates an
ホース3、延長管5、吸込み具6で吸気経路9を形成し、吸込み具6から吸引された塵埃等は、この吸気経路9内を通って、本体1の前部に配された集塵室7へと導かれることになる。本実施の形態における吸込み具6は、電動機14と、ベルト等(図示せず)を介して前記電動機14により回転駆動されて被掃除面の塵埃をかきあげる回転ブラシ8を内蔵している。
An air intake path 9 is formed by the hose 3, the
図2において、16は、マイクロコンピュータであり、電動送風機2の駆動状態を制御する後述の制御手段と、接地検出手段の検査を行う検査手段を実現している。マイクロコンピュータ16は、本体1に内蔵され、使用者によって操作される操作部4からの運転モード信号Vtを検知して、駆動手段A10と駆動手段B11に駆動信号を出力して、電動送風機2及び電動機14のそれぞれに商用電源13を位相制御し、電動送風機2と電動機14を駆動状態に制御する動作モード(強・中・弱)と、停止状態にする停止モード(切)を有して、駆動制御する。
In FIG. 2,
12は、マイクロコンピュータ16等の制御関連回路に電力を供給する電源手段である。マイクロコンピュータ16のVinは、駆動手段B11が電動機14に電力供給をしていない時には、抵抗R5と抵抗R6の並列接続抵抗値と抵抗R2とで分圧される電圧信号を入力可能に構成されている。
15は、吸込み具6が被掃除床面上に、床面上の塵埃を吸引可能に接地(着床)されている時に閉路し、離床している時に開路する接地検出スイッチ手段で、電動機14への電力供給線上に挿入され、抵抗R6と組合せることで、接地検出手段を構成する。 15 is a grounding detection switch means that closes when the suction tool 6 is grounded (landing) on the floor surface to be cleaned so as to be able to suck dust on the floor surface, and opens when the suction tool 6 leaves the floor. The ground detection means is configured by being inserted on the power supply line to and connected to the resistor R6.
駆動手段B11が電動機14に電力を供給すべく位相制御を行っている場合は、この接地検出スイッチ手段15が閉路することで、電動機14に電力が供給され、逆に、開路されると電動機14への電力供給が遮断され、電動機14の駆動は停止する。つまり、駆動手段B11が、電動機14に電力供給すべく動作している時、吸込み具6が被掃除面に接地している時は、回転ブラシ8が回転し、吸込み具6が被掃除面に接地していない(離床)時は、回転ブラシ8の回転が停止する構成となっている。抵抗R5は、抵抗R2との分圧で吸込み具6の接続有無を検知可能な接続検出手段である。
When the drive unit B11 performs phase control to supply power to the
以上のように構成された本実施の形態における電気掃除機の動作、作用について、図3を用いて説明する。 The operation and action of the electric vacuum cleaner configured as described above will be described with reference to FIG.
まずマイクロコンピュータ16が接地検出手段(接地検出スイッチ手段15と抵抗R6との組合せ)の出力情報から、吸込み具6が被掃除面に接地していないことを検知すると電動送風機2の駆動状態を低い状態、つまり、位相制御によって供給電力を低くする制御動作について簡単に説明する。
First, when the
図1のように全ての構成要素が接続された電気掃除機において、使用者が操作部4を操作すると、マイクロコンピュータ16は、その操作情報信号Vtから、例えば、強運転モードに操作されたことを検知すると、電動送風機2への供給電力が最大となるように駆動手段A10へ制御信号を出力すると共に、電動機14も駆動するために駆動手段B11に所定の駆動信号を出力する(図3(a)の電動機駆動信号参照)。
In the vacuum cleaner to which all the components are connected as shown in FIG. 1, when the user operates the operation unit 4, the
電動機駆動信号は、商用電源波形(図3(a)参照)のゼロクロスタイミングから所定の時間(T1)だけ電動機14への供給電力を位相制御するよう出力する。この駆動信号出力により、マイクロコンピュータ16は、T1の期間で、抵抗R5と抵抗R6の並列接続抵抗値と抵抗R2の抵抗値によって、Vss(マイクロコンピュータ16の電源電圧)が分圧される電圧信号Vinを検知することが出来る。
The motor drive signal is output so as to phase-control the power supplied to the
T1の期間でのVinは、接地検出スイッチ手段15の閉開路の状態と吸込み具6が延長管5に接続されているか否か即ち抵抗R5と抵抗R6の接続有無の各条件によって、図3(b)に示すように変化する。
Vin in the period of T1 is shown in FIG. 3 (depending on the closed circuit state of the ground detection switch means 15 and whether or not the suction tool 6 is connected to the
因みに、各条件(下記(1)〜(3))の電圧信号Vin詳細は、次のように概算算出できる。 Incidentally, the details of the voltage signal Vin under each condition (the following (1) to (3)) can be roughly calculated as follows.
(1)接地検出スイッチ手段15が閉路している場合、
Vin=Vss×[1÷(1/R5+1/R6)+R2]×R2=V1
(2)接地検出スイッチ手段15が開路している場合、
Vin=Vss×[1÷(1/R5)+R2]×R2=V2
(3)吸込み具6が未接続の場合、
Vin=Vss
以上のようにして、マイクロコンピュータ16は、Vinの値から、各接続条件を判別可能であり、例えば、条件(2)の場合は、電気掃除機は、被掃除床面上の塵埃を吸引できない状態であることを判別して電動送風機2(電動機14含む)への電力供給を低く、もしくは停止するように制御して、無駄な電力消費と騒音発生を防止するものである。
(1) When the ground detection switch means 15 is closed,
Vin = Vss × [1 ÷ (1 / R5 + 1 / R6) + R2] × R2 = V1
(2) When the ground detection switch means 15 is open,
Vin = Vss × [1 ÷ (1 / R5) + R2] × R2 = V2
(3) When the suction tool 6 is not connected,
Vin = Vss
As described above, the
以下、この電動送風機2への供給電力を低くした状態、もしくは停止した状態をスタンバイモードという。更にVinの値に時間の要素を含めて判別する(例えば(2)の条件が所定時間成立し続けた時にスタンバイモード移行条件が成立したと判断する等)ことで更に信頼性の高い制御となることは言うまでも無い(因みに、T1以外の期間でのVinは、ほぼ商用電源13に近い電圧をD1で電圧クリップされた電圧信号となるのでマイクロコンピュータ16は、Vdd又はVss同等電圧として検知されることは言うまでも無い)。
Hereinafter, a state where the power supplied to the
上記のように吸込み具6の被掃除面への接地状態を検出して、電動送風機2の駆動状態を制御することにより、使用者が、電気掃除機で床面上等を掃除中に急に他の用事をしなければならなくなって動作モードのまま(ただし、吸込み具6が被掃除面に接地しないようにして)放置したり、吸込み具6を持ち上げて移動したりする間は、吸込み具6が被掃除面に接地していないことを検知して、つまり、掃除を行うための電動送風機2の駆動状態が必要ない状況であると判断して、電動送風機2を低い状態で駆動するスタンバイモードへ移行させ、省エネと静音運転を実現できるものである。
By detecting the grounding state of the suction tool 6 to the surface to be cleaned and controlling the driving state of the
ところで、接地検出スイッチ手段15が正常に動作しているときは、上述したように、使用者が掃除をしていない状況でのみ、電動送風機2への供給電力を下げるスタンバイモードへ移行して、省エネや静音運転を行うことができるが、例えば、接地検出スイッチ手段15に不具合が発生し、吸込み具6が被掃除面に接地しているにも関わらず、開路した状態が発生し、その状態が継続した場合は、使用者が被掃除面を掃除をしようとしても、意図せず、スタンバイモードに移行し、十分な吸引力が得られず、掃除性能の低下が発生してしまう。
By the way, when the ground detection switch means 15 is operating normally, as described above, only in a situation where the user is not cleaning, the mode shifts to the standby mode in which the power supplied to the
これは、抵抗R6がオープンモードで故障したときも、同様の現象となってしまう。マイクロコンピュータ16は、Vinの値により、スタンバイモードへの移行の判断を行う以前に、検査手段の動作として、Vinの値の判断を行う。スタンバイモードへの移行は、電動送風機2へ電力が供給されている動作モードでのみ、有効となるように制御され、停止モードにおいては、スタンバイモードに移行することはないように制御されている。
This is the same phenomenon when the resistor R6 fails in the open mode. The
マイクロコンピュータ16は、停止モードにおいて、定期的(例えば1秒毎)に、Vinの値がV1(条件(1))となっているかどうかを確認する。V1(条件(1))となっているということは、接地検出スイッチ手段15は、閉路されており、抵抗R6やVinに至る経路も正常であるので、接地検出手段は、正常あると判断する。この場合、以降、使用者が操作部4を操作して、動作モード(例えば強)に移行すると、マイクロコンピュータ16は、スタンバイモードへの移行を許可し、吸込み具6が、離床して接地検出スイッチ手段15が開路すると、前述したように、スタンバイモードへ移行することができる。
In the stop mode, the
停止モードにおいて、Vinが、V2(条件(2))となるのは、以下の条件が考えられる。 In the stop mode, Vin is V2 (condition (2)) under the following conditions.
条件a:吸込み具6が離床している場合
条件b:接地検出スイッチ手段15が閉路できない場合
条件c:抵抗R6の故障(オープンモード)
条件aは、使用者の使い方によって発生するもので、通常、使用者が掃除を開始する前には、停止モードであっても、ホース3の操作部4付近を把持しているので、吸込み具6は、被掃除面に接地しているので、非常に稀なパターンであり、電気掃除機としての不具合ではないが、停止モードにおいて、マイクロコンピュータ16が検査手段としてVinを確認するタイミングで、条件aとなっていた場合は、一旦、正常ではないと判断する。
条件bは、電気掃除機としての不具合ではあるが、電気的にオープンになったり、機械的に閉路できなくなったりという場合が考えられ、例えば、被掃除面の塵埃が機械的に引っかかって閉路できない一時的なものと、そうではない恒久的な故障とが考えられるが、条件bについても、一旦、正常ではないと判断する。
Condition a: When the suction tool 6 leaves the floor Condition b: When the grounding detection switch means 15 cannot be closed Condition c: Failure of the resistor R6 (open mode)
The condition a is generated by the usage of the user. Normally, before the user starts cleaning, even if the user is in the stop mode, the vicinity of the operation unit 4 of the hose 3 is gripped. 6 is a very rare pattern because it is grounded on the surface to be cleaned, and is not a malfunction as a vacuum cleaner. However, in stop mode, the
Although condition b is a malfunction as a vacuum cleaner, there are cases where it becomes electrically open or cannot be closed mechanically. For example, dust on the surface to be cleaned is mechanically caught and cannot be closed. A temporary failure and a permanent failure which is not so are considered, but the condition b is once judged not to be normal.
条件cは、電気掃除機としての恒久的なものであり、完全な故障であり、マイクロコンピュータ16が正常ではないと判断するべき条件である。
The condition c is a permanent condition as a vacuum cleaner, is a complete failure, and is a condition for determining that the
上記3つの条件の中で、条件aで、マイクロコンピュータ16が正常でないと判断することは稀であることと、条件bで発生する一時的な不具合状態では、いずれにしても回転ブラシ8が回転せず本来の掃除性能を発揮できない状態で、電動送風機2による吸引力で掃除能力を補わなければならないこと、条件bの残りの状態と条件cは、完全な故障であることからすると、以降は、スタンバイモードに移行しないように制御することによって、実使用上支障をきたすことなく、不具合が発生しても、掃除性能を低下させることなく、維持することができる。
Among the above three conditions, it is rare to determine that the
また、マイクロコンピュータ16が、停止モード中に、Vinでの入力で検査を行うことにより、検査判断結果が正常であった時は、動作モード移行直後に使用者が吸込み具6を持ち上げ、離床し場合、直ちにスタンバイモードに移行することができ、省エネ性を向上することができる。
In addition, when the
更に、マイクロコンピュータ16が、使用者が操作部4を操作してから、動作モードに移行させるまでの間に、Vinによるスタンバイモードへの以降許可判断を行うことにより、動作モード移行直前の接地検出手段の検査を行い、より、掃除するタイミングに近いポイントで検査を行え、スタンバイモード許可判断の精度を向上させることができる。
Further, the ground detection immediately before the operation mode transition is performed by the
ところで、マイクロコンピュータ16が、Vinの信号により、スタンバイモードへの移行許可判断を行おうとすると、吸込み具6が延長管5、もしくはホース3に接続されていなければ判断できない。マイクロコンピュータ16は、Vinに対して、μ秒からm秒のオーダーでの判断処理を行っており、また、Vinに入力される信号は、抵抗を分割した信号であるので、合成抵抗が変化することによるVinの電圧も瞬時に追従するので、吸込み具6が接続されて、マイクロコンピュータ16が吸込み具6が接続されていると認識し、スタンバイモードへの移行許可判断を行うまでは、わずかな時間しか必要とせず、ほぼ同時判断を行っている。
By the way, if the
従って、吸込み具6を接続し、すぐに使用者が操作部4を操作して動作モードに移行させ、直後に、吸込み具6が離床状態となった場合でも、検査結果が正常であれば、スタンバイモードへ移行させるよう制御することができ、より、省エネ性を向上できるとともに、早く、静音運転へと移行することができる。 Therefore, when the suction tool 6 is connected, the user immediately operates the operation unit 4 to shift to the operation mode, and immediately after the suction tool 6 is in the state of getting out of bed, if the inspection result is normal, Control can be performed so as to shift to the standby mode, energy savings can be further improved, and it is possible to quickly shift to silent operation.
ここで、前述した条件aでマイクロコンピュータ16が、接地検出手段に不具合があると判断し、スタンバイモードへの移行を許可しない状態で動作モードへ移行した場合は、使用者が掃除を行っていれば、吸込み具6は被掃除面に接地しており、その場合は、VinもV1(条件(1))となっている。これは、検査のタイミングで入力されていれば、正常と判断されるレベルの信号であり、電気掃除機としても正常な状態で、接地検出手段による接地と離床の検出が可能な状態であると判断できる。
Here, if the
マイクロコンピュータ16は、最初の判断で正常ではない(Vin=V2)と判断した後、Vin=V1であった場合に、接地と離床の検出が可能と判断し、最初の正常ではないという検査結果を解除して正常と判断し、スタンバイモードへの移行を許可するよう制御することにより、条件aでの一時的な判断に対しての補償を行うことができ、検査の精度を向上させることができる。
After the
これは、条件bで発生する一時的な不具合状態に対しても同様で、一旦、正常でないと判断した後、使用者が動作モードで使用中に、例えば、接地検出スイッチ手段15への塵埃のかみ込みによって閉路できなかった状態が、塵埃が外れることによってこの状態が解除され閉路可能となれば、Vinには、同様の信号変化が発生し、接地と離床の検出が可能であると判断することができる。この構成においては、接地検出手段の正常、不具合状況に合わせて、省エネ性能、静音運転と掃除性能を両立させながら、それぞれの効果を最大限に引き出すことができる。 This is the same for the temporary failure state that occurs in the condition b. For example, after the user determines that the malfunction is not normal, the user may, for example, collect dust on the ground detection switch means 15 during use in the operation mode. If the state that could not be closed due to biting is released by the removal of dust and can be closed, a similar signal change occurs in Vin, and it is determined that grounding and bed leaving can be detected. be able to. In this configuration, the respective effects can be maximized while achieving both energy saving performance, silent operation and cleaning performance in accordance with the normality and failure status of the ground contact detection means.
条件bで発生する一時的な不具合状態の発生原因の例としては、接地検出スイッチ手段15への塵埃のかみ込みを上げたが、この状態は、掃除を始めた時は、正常であっても、掃除を進める中で発生する可能性もある。そうなると、使用者が吸込み具6で被掃除面を掃除しようとしている意図とは反対に、スタンバイモードへ移行してしまい、掃除性能が得られなくなってしまう。
As an example of the cause of the temporary failure state that occurs in the condition b, the
マイクロコンピュータ16は、動作モード中において、Vin=V2となっている時間を計時し、予め設定した所定時間以上経過すると、検査結果として正常でないと判断することにより、掃除中に発生した不具合についても検出することができる。この場合、電動送風機2の駆動状態としては、スタンバイモードでの低駆動状態運転となっているので、不具合と判断した時は、スタンバイモード移行前の駆動状態に戻しても良いし、停止モードに移行するまでは、スタンバイモードを維持してもよい。
The
前者の場合、所定時間を、使用者が動作モードのまま放置する時間や吸込み具6を持ち上げて移動する時間より短く設定してしまうと、意図的にスタンバイモードにしているにも関わらず、勝手にスタンバイモードが解除されてしまうというデメリットもあるので、所定時間は長めに設定したほうが好ましいが、接地検出スイッチ手段15に塵埃がかみ込んだ状態であれば、掃除性能を早く復帰できるというメリットがある。 In the former case, if the predetermined time is set shorter than the time for the user to leave in the operation mode or the time for lifting and moving the suction tool 6, the standby mode is intentionally set in spite of the intentional standby mode. However, it is preferable to set the predetermined time longer. However, if the ground detection switch means 15 is dusted, the cleaning performance can be recovered quickly. is there.
また、後者の場合は、所定時間を、使用者が動作モードのまま放置する時間や吸込み具6を持ち上げて移動する時間より短く設定してしまうと、スタンバイモードの状態を正常でない状態と誤判定し、停止モードに移行するまでは、掃除性能が低下してしまうというデメリットがあるが、スタンバイモード状態であった場合は、その状態を維持できるので省エネ性を確保できる。 In the latter case, if the predetermined time is set to be shorter than the time for the user to leave the operation mode or the time for lifting and moving the suction tool 6, the standby mode is erroneously determined as an abnormal state. However, there is a demerit that the cleaning performance is lowered until the mode is changed to the stop mode. However, in the standby mode state, the state can be maintained, so that energy saving can be ensured.
しかし、一旦、停止モードにすると、再度動作モードに移行する直前には、吸込み具6の状態としては、前述したように、通常は接地状態であり、スタンバイモードへの移行が発生する条件である吸込み具6の離床状態ではないため、前回塵埃がかみ込んでおらず、誤判定してしまっていたとすると、検査結果は正常に更新され、動作モード移行後には、接地検出手段の状況に応じた意図どおりの制御を行うことができる。かみ込みが発生していて、動作モード移行後もかみ込みが継続していれば、正常でないという判定結果は継続され、スタンバイモードへの移行を許可しない状況を継続できる。 However, once in the stop mode, immediately before shifting to the operation mode again, as described above, the state of the suction tool 6 is normally a grounded state and is a condition for shifting to the standby mode. If the suction tool 6 is not out of bed and dust has not been caught in the previous time and it has been misjudged, the inspection result will be updated normally, and after the transition to the operation mode, it will depend on the situation of the ground detection means Control as intended. If biting has occurred and biting has continued even after the transition to the operation mode, the determination result that the bit is not normal is continued, and a state in which the shift to the standby mode is not permitted can be continued.
なお、抵抗R5により吸込み具6の着脱を検出し、吸込み具6が装着されていない時は、スタンバイモードには、移行しないように制御することにより、例えば、抵抗R6や抵抗R5からVinまでの信号経路に異常(オープンモード)が発生した場合でも、掃除性能を低下させずに維持することができる。 In addition, when the attachment / detachment of the suction tool 6 is detected by the resistor R5 and the suction tool 6 is not attached, by controlling so as not to enter the standby mode, for example, from the resistor R6 or the resistor R5 to Vin Even when an abnormality (open mode) occurs in the signal path, the cleaning performance can be maintained without deteriorating.
以上のように本実施の形態によれば、接地検出手段が正常である場合、もしくは、不具合状態が解除された場合は、速やかに省エネ、静音運転状態への移行が可能な状態とし、かつ、不具合がある場合は、掃除性能を低下させずに維持できるという、省エネと性能を両立させた優れた電気掃除機を提供できる。 As described above, according to the present embodiment, when the ground contact detection means is normal, or when the malfunction state is released, it is possible to promptly save energy and shift to the silent operation state, and When there is a defect, it is possible to provide an excellent vacuum cleaner that can maintain energy efficiency and performance, and can maintain the cleaning performance without deteriorating.
以上のように本発明に係る電気掃除機は、スイッチ手段や接地検出手段が故障、または、一時的な動作不具合が発生しても、掃除性能を低下させることなく、かつ、故障がない場合や、一時的な不具合が解除された場合は、素早く、省エネ状態への切り替えが可能な状態に移行でき、掃除性能に悪影響を与えることなく、省エネ性能も向上できるもので、家庭用、業務用の各種電気掃除機に適用できる。 As described above, the vacuum cleaner according to the present invention does not deteriorate the cleaning performance even if the switch means or the grounding detection means fails or a temporary operation failure occurs, and there is no failure or When a temporary malfunction is resolved, it is possible to quickly switch to an energy-saving state that can improve the energy-saving performance without adversely affecting the cleaning performance. Applicable to various vacuum cleaners.
1 電気掃除機本体(本体)
2 電動送風機
3 ホース(操作部含む)
4 操作部
5 延長管
6 床用吸込み具(吸込み具)
10 駆動手段A
11 駆動手段B
12 電源手段
13 商用電源
14 電動機
15 接地検出スイッチ手段(接地検出手段)
16 マイクロコンピュータ(制御手段、検査手段)
R5 抵抗(接続検出手段)
R6 抵抗(接地検出手段)
1 Main body of vacuum cleaner (main unit)
2 Electric blower 3 Hose (including operation unit)
4
10 Drive means A
11 Driving means B
12 Power supply means 13
16 Microcomputer (control means, inspection means)
R5 resistance (connection detection means)
R6 resistance (grounding detection means)
Claims (7)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008319239A JP5304215B2 (en) | 2008-12-16 | 2008-12-16 | Electric vacuum cleaner |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008319239A JP5304215B2 (en) | 2008-12-16 | 2008-12-16 | Electric vacuum cleaner |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010142260A true JP2010142260A (en) | 2010-07-01 |
| JP5304215B2 JP5304215B2 (en) | 2013-10-02 |
Family
ID=42563324
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008319239A Expired - Fee Related JP5304215B2 (en) | 2008-12-16 | 2008-12-16 | Electric vacuum cleaner |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5304215B2 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018094021A (en) * | 2016-12-12 | 2018-06-21 | 株式会社マキタ | Dust collector |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6416291A (en) * | 1987-07-08 | 1989-01-19 | Tokyo Electric Co Ltd | Vacuum cleaner |
| JP2002369777A (en) * | 2001-06-13 | 2002-12-24 | Toshiba Tec Corp | Vacuum cleaner |
| JP2005058746A (en) * | 2003-07-30 | 2005-03-10 | Matsushita Electric Ind Co Ltd | Vacuum cleaner |
| JP2008184282A (en) * | 2007-01-30 | 2008-08-14 | Mitsubishi Electric Corp | Man conveyor |
-
2008
- 2008-12-16 JP JP2008319239A patent/JP5304215B2/en not_active Expired - Fee Related
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS6416291A (en) * | 1987-07-08 | 1989-01-19 | Tokyo Electric Co Ltd | Vacuum cleaner |
| JP2002369777A (en) * | 2001-06-13 | 2002-12-24 | Toshiba Tec Corp | Vacuum cleaner |
| JP2005058746A (en) * | 2003-07-30 | 2005-03-10 | Matsushita Electric Ind Co Ltd | Vacuum cleaner |
| JP2008184282A (en) * | 2007-01-30 | 2008-08-14 | Mitsubishi Electric Corp | Man conveyor |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018094021A (en) * | 2016-12-12 | 2018-06-21 | 株式会社マキタ | Dust collector |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5304215B2 (en) | 2013-10-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5077159B2 (en) | Electric vacuum cleaner | |
| EP2047784B1 (en) | Vacuum electronic switch detection system | |
| JP2007143818A (en) | Vacuum cleaner | |
| JP5304215B2 (en) | Electric vacuum cleaner | |
| JP2003164399A (en) | Electric vacuum cleaner | |
| JP5256981B2 (en) | Electric vacuum cleaner | |
| JP2013233198A (en) | Vacuum cleaner | |
| JP5240083B2 (en) | Electric vacuum cleaner | |
| JP4655949B2 (en) | Electric vacuum cleaner | |
| JP4967593B2 (en) | Electric vacuum cleaner | |
| JP5098989B2 (en) | Electric vacuum cleaner | |
| JPH10328103A (en) | Vacuum cleaner | |
| JP2006340828A (en) | Electric cleaner | |
| JP2012055462A (en) | Vacuum cleaner | |
| JP4461935B2 (en) | Vacuum cleaner | |
| JP2006158567A (en) | Vacuum cleaner | |
| JP2006034756A (en) | Vacuum cleaner | |
| JP5223649B2 (en) | Electric vacuum cleaner | |
| JPH04144527A (en) | Vacuum cleaner | |
| JP2005131136A (en) | Vacuum cleaner | |
| JP2006204519A (en) | Vacuum cleaner | |
| JP2012217787A (en) | Vacuum cleaner | |
| JP5151860B2 (en) | Electric vacuum cleaner | |
| JP2010194208A (en) | Vacuum cleaner | |
| JP5287284B2 (en) | Electric vacuum cleaner |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110422 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20110512 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120919 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121023 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20121214 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121219 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130528 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130610 |
|
| LAPS | Cancellation because of no payment of annual fees |