JP2010096633A - 同行判定装置とその方法及びプログラム - Google Patents
同行判定装置とその方法及びプログラム Download PDFInfo
- Publication number
- JP2010096633A JP2010096633A JP2008267664A JP2008267664A JP2010096633A JP 2010096633 A JP2010096633 A JP 2010096633A JP 2008267664 A JP2008267664 A JP 2008267664A JP 2008267664 A JP2008267664 A JP 2008267664A JP 2010096633 A JP2010096633 A JP 2010096633A
- Authority
- JP
- Japan
- Prior art keywords
- distance
- data
- accompanying
- calculated
- determination
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images














Landscapes
- Navigation (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
Abstract
【解決手段】同行判定をする際に、同行データ抽出プログラム136により二者間の位置座標とDOP値をもとに計測距離dと合成誤差距離Rを算出すると共に、同行度算出プログラム134により上記算出された計測距離dと合成誤差距離Rをもとに同行度Fを算出する。そして、同行判定プログラム137により、上記算出された同行度Fを別途定めた2つのしきい値と比較し、さらに合成誤差距離Rをそのしきい値と比較することにより、二者が同行しているか否かを判定する。
【選択図】 図5
Description
すなわち、この発明によれば、位置計測手段による計測精度の良し悪しによらず常に高精度の同行判定を可能にした同行判定装置とその方法及びプログラムを提供することができる。
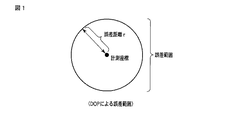
GPSの計測精度の良し悪しに応じて、同行の判定基準が変化する方法を用いる。その際、計測精度の尺度としてDOP(Dilution Of Precision)値を使用する。DOP値とは、捕捉したGPS衛星の数や配置場所、信号の強度をもとに算出される値であり、DOP値が小さいほど計測精度が高くなる。一般的にDOP値1に対して誤差5mと言われているため、DOP値に5を掛けた値を誤差距離rと定義する。
r=5×DOP値 (1)
(1) 式を定義することで計測された位置座標からの誤差範囲を図1に示すように表すことが可能である。したがって、図2に示すように人物U1と人物U2の計測された位置座標の誤差範囲どうしが重なっていれば、人物U1と人物U2は同行している可能性が高いといえる。
F=1−(d/(d+r1+r2)) (2)
r1+r2を合成誤差距離Rとおくと、(2) 式は以下のように変形できる。
R=(F/(1−F))d (3)
この実施形態は、人物U1が所持する携帯端末と人物U2が所持する携帯端末がそれぞれ複数のGPS(Global Positioning System)衛星から送信されるGPS信号を受信して自端末の位置を計測し、この計測された位置情報を端末間で通信により通知して同行判定を行うもので、この同行判定において二者間の計測距離dと合成誤差距離Rを考慮した判定処理を行うようにしたものである。
通信インタフェース160は図4に示した通信装置15,25に相当するもので、CPU110の制御の下で、例えば携帯電話網や無線LAN、WiFiにより規定される通信プロトコルに従い他者の携帯端末との間でアンテナ161を介して無線通信を行い、これにより他者の携帯端末から変換後のGPSデータを受信する。
変換GPSデータ導出プログラム135は、上記位置計測制御プログラム132により算出された生GPSデータをデータメモリ140から読み出し、日付・時刻ごとにまとめたデータに変換する。
距離算出プログラム133は、上記同行データ導出プログラム136により他の携帯端末から受信した変換後のGPSデータと、自端末の変換後のGPSデータをもとに、他者の端末と自端末との間の距離dを算出する処理と、上記変換後のGPSデータに含まれるDOP値をもとに他者の端末の誤差距離r1と自端末の誤差距離r2との合計値である合成誤差距離Rを算出する処理を、CPU110に実行させる。
同行判定プログラム137は、上記同行度算出プログラム134により算出された同行度F及び上記距離算出プログラム133により算出された合成誤差距離Rを、予め設定された同行度及び合成誤差距離のしきい値と比較し、二者が同行しているか否かを判定する処理を、CPU110に実行させる。
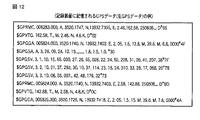
携帯端末10,20では、位置計測制御プログラム132の制御の下でGPS受信機150により複数のGPS衛星SATからのGPS信号が定期的に受信され、この受信された各GPS信号をもとに計算装置12,22により時刻、緯度、経度及びDOP値が計算されて、その算出値が生GPSデータとしてデータメモリ140の位置情報記録エリア142に記憶される。図12にこの記憶された生GPSデータの一例を示す。
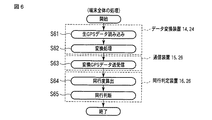
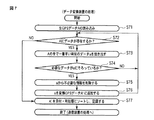
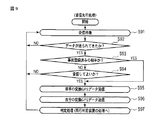
すなわち、先ずデータ変換装置14,24が動作し、上記データメモリ140内の位置情報記録エリア141から生GPSデータが読み出され(ステップS61)、この生GPSデータを同行判定に必要なデータに変換するための処理が行われる(ステップS62)。図7は、データ変換装置14,24による処理手順と処理内容を示すフローチャートである。なお、データ変換装置14,24の処理動作は同一なので、ここではデータ変換装置14の処理動作のみを説明する。
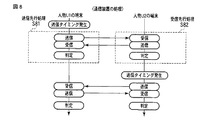
すなわち、CPU110は、ステップS92において他の端末からのデータの到来を監視しており、通信インタフェース160により変換GPSデータが受信されると、その送信元の端末が事前に登録された端末であるか否かをステップS93で判定する。その結果、送信元の端末が登録済みの端末であれば、ステップS95により、上記送られてきた変換GPSデータを受信してデータメモリ140に格納する。そして、ステップS96により、データメモリ140内の変換GPSデータ記録エリアから自端末の変換GPSデータを読み出し、通信インタフェース160から上記送信元の端末へ送信する。
すなわち、CPU110は、先ずステップS101によりデータメモリ140内の変換GPSデータ記録エリアから自端末の変換GPSデータを読み出し、通信インタフェース160から、事前に指定された相手先の端末へ送信する。そして、この送信後にステップS102において送信相手端末からの応答を待つ。この状態で、送信相手端末から受信を拒否する旨の応答メッセージが到来せず、変換GPSデータが送られると、この変換GPSデータをステップS103により受信してデータメモリ140に格納し、ステップS104による同行判定処理に移行する。これに対し、上記受信拒否メッセージが到来した場合には、同行判定処理に移行せずにそのまま処理を終了する。
図14に、以上の同行度算出部S120により算出された計測距離d、合成誤差距離R及び同行度Fの一例を示す。
なお、上記平均化の方法としては、時刻が時間間隔T内に含まれる計測距離d、合成誤差距離R及び同行度Fをそれぞれ足し合わせ、この足し合わせた結果を上記時間間隔T内に含まれる時刻の数で割る方法が用いられる。
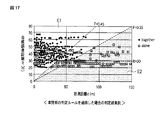
同行度F≦0.35であれば非同行
0.35<同行度F<0.45の場合には、合成誤差距離Rが30m以下であれば非同行で30mを超えていれば同行
同行度F≧0.45であれば同行 …(3)
と判定するものとする。
上記判定ルール(3) を適用して同行判定をした結果、正解率は95.3%となった。ちなみに、しきい値を単純に0.4として判定を行った場合には、正解率は91.15%となり、判定精度の向上が確認された。
要するにこの発明は、上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合せにより種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態に亘る構成要素を適宜組み合せてもよい。
Claims (3)
- 位置計測手段により得られる第1及び第2の移動体の各位置情報履歴をもとに、当該第1及び第2の移動体が同行しているか否かを判定する同行判定装置であって、
前記第1及び第2の移動体間の距離をその各位置情報履歴をもとに算出する手段と、
前記位置計測手段が有する計測精度をもとに前記各位置情報履歴に含まれる誤差距離を算出し、この算出された各誤差距離の合計値を合成誤差距離として算出する手段と、
前記算出された第1及び第2の移動体間の距離と、前記算出された合成誤差距離とをもとに、前記第1及び第2の移動体の同行度を算出する手段と、
前記算出された同行度及び合成誤差距離を、予め設定した同行度及び合成誤差距離のしきい値と比較して、前記第1及び第2の移動体が同行しているか否かを判定する手段と
を具備することを特徴とする同行判定装置。 - 位置計測手段により得られる第1及び第2の移動体の各位置情報履歴をもとに、当該第1及び第2の移動体が同行しているか否かを判定する同行判定方法であって、
前記第1及び第2の移動体間の距離をその各位置情報履歴をもとに算出する過程と、
前記位置計測手段が有する計測精度をもとに前記各位置情報履歴に含まれる誤差距離を算出し、この算出された各誤差距離の合計値を合成誤差距離として算出する過程と、
前記算出された第1及び第2の移動体間の距離と、前記算出された合成誤差距離とをもとに、前記第1及び第2の移動体の同行度を算出する過程と、
前記算出された同行度及び合成誤差距離を、予め設定した同行度及び合成誤差距離のしきい値と比較して、前記第1及び第2の移動体が同行しているか否かを判定する過程と
を具備することを特徴とする同行判定方法。 - 位置計測手段により得られる第1及び第2の移動体の各位置情報履歴をもとに、コンピュータを用いて前記第1及び第2の移動体が同行しているか否かを判定するプログラムであって、
前記第1及び第2の移動体間の距離をその各位置情報履歴をもとに算出する処理と、
前記位置計測手段が有する計測精度をもとに前記各位置情報履歴に含まれる誤差距離を算出し、この算出された各誤差距離の合計値を合成誤差距離として算出する処理と、
前記算出された第1及び第2の移動体間の距離と、前記算出された合成誤差距離とをもとに、前記第1及び第2の移動体の同行度を算出する処理と、
前記算出された同行度及び合成誤差距離を、予め設定した同行度及び合成誤差距離のしきい値と比較して、前記第1及び第2の移動体が同行しているか否かを判定する処理と
を、前記コンピュータに実行させることを特徴とするプログラム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008267664A JP4932809B2 (ja) | 2008-10-16 | 2008-10-16 | 同行判定装置とその方法及びプログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008267664A JP4932809B2 (ja) | 2008-10-16 | 2008-10-16 | 同行判定装置とその方法及びプログラム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010096633A true JP2010096633A (ja) | 2010-04-30 |
| JP4932809B2 JP4932809B2 (ja) | 2012-05-16 |
Family
ID=42258422
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008267664A Expired - Fee Related JP4932809B2 (ja) | 2008-10-16 | 2008-10-16 | 同行判定装置とその方法及びプログラム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4932809B2 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012010103A (ja) * | 2010-06-24 | 2012-01-12 | Fujitsu Ltd | 位置監視装置、位置監視プログラムおよび位置監視方法 |
| JP2012034313A (ja) * | 2010-08-03 | 2012-02-16 | National Institute Of Information & Communication Technology | 携帯端末送信電波測定装置およびその測定方法 |
| JP2012123702A (ja) * | 2010-12-10 | 2012-06-28 | Kddi Corp | 複数の移動端末の同行状態を推定する同行判定装置、移動端末、プログラム及び方法 |
| JP2015005103A (ja) * | 2013-06-20 | 2015-01-08 | ヤフー株式会社 | 同行判断装置、同行判断方法、およびプログラム |
| JP2015090354A (ja) * | 2013-11-07 | 2015-05-11 | 富士通株式会社 | 判定装置、判定プログラム、及び判定方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003021674A (ja) * | 2001-07-09 | 2003-01-24 | Tomomi Makino | ノードの操作者を他ノードの現在地に誘導するシステム |
| JP2007102357A (ja) * | 2005-09-30 | 2007-04-19 | Toyota Central Res & Dev Lab Inc | 車両制御装置 |
| JP2008113184A (ja) * | 2006-10-30 | 2008-05-15 | Nec Corp | 位置監視システム、位置監視装置、位置監視方法及び移動端末 |
-
2008
- 2008-10-16 JP JP2008267664A patent/JP4932809B2/ja not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003021674A (ja) * | 2001-07-09 | 2003-01-24 | Tomomi Makino | ノードの操作者を他ノードの現在地に誘導するシステム |
| JP2007102357A (ja) * | 2005-09-30 | 2007-04-19 | Toyota Central Res & Dev Lab Inc | 車両制御装置 |
| JP2008113184A (ja) * | 2006-10-30 | 2008-05-15 | Nec Corp | 位置監視システム、位置監視装置、位置監視方法及び移動端末 |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012010103A (ja) * | 2010-06-24 | 2012-01-12 | Fujitsu Ltd | 位置監視装置、位置監視プログラムおよび位置監視方法 |
| JP2012034313A (ja) * | 2010-08-03 | 2012-02-16 | National Institute Of Information & Communication Technology | 携帯端末送信電波測定装置およびその測定方法 |
| JP2012123702A (ja) * | 2010-12-10 | 2012-06-28 | Kddi Corp | 複数の移動端末の同行状態を推定する同行判定装置、移動端末、プログラム及び方法 |
| JP2015005103A (ja) * | 2013-06-20 | 2015-01-08 | ヤフー株式会社 | 同行判断装置、同行判断方法、およびプログラム |
| JP2015090354A (ja) * | 2013-11-07 | 2015-05-11 | 富士通株式会社 | 判定装置、判定プログラム、及び判定方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4932809B2 (ja) | 2012-05-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10044851B2 (en) | Methods, systems, and computer program products for schedule management based on locations of wireless devices | |
| US20070060108A1 (en) | System and method of obtaining directions to scheduled events | |
| US8634855B2 (en) | System and method for sharing location information | |
| US8660587B2 (en) | Method for providing position information using time period | |
| US20130225196A1 (en) | Geo-Fence Generation and Updating Based on Device Movement Patterns | |
| JP5169674B2 (ja) | 位置情報取得システム、位置情報取得方法、移動体通信端末、及び、プログラム | |
| JP4074277B2 (ja) | 通信サービスシステム、移動体通信端末及びサーバ | |
| US20110238735A1 (en) | Trusted Maps: Updating Map Locations Using Trust-Based Social Graphs | |
| JP4932809B2 (ja) | 同行判定装置とその方法及びプログラム | |
| KR102092057B1 (ko) | 전자 장치의 위치 정보 공유 방법 및 장치 | |
| JP2010287059A (ja) | 移動端末、サーバ装置、コミュニティ生成システム、表示制御方法およびプログラム | |
| TWI529406B (zh) | 用於表徵及影響移動器件位置正確度及/或不確定性之方法及裝置 | |
| EP2571232B1 (en) | Information processing device, information processing method, and program | |
| JP2017138262A (ja) | 位置推定システム | |
| CN102238472B (zh) | 以移动装置的目前位置更新服务器储存的位置资讯的方法 | |
| JP2023036658A (ja) | 情報処理装置、情報処理方法及び情報処理プログラム | |
| CN103036953A (zh) | 一种为用户提供动态位置信息的方法和装置 | |
| JP2019075647A (ja) | 携帯端末、位置確認装置、位置確認システム、位置特定プログラム、位置確認プログラム、位置特定方法および位置確認方法 | |
| JP5308374B2 (ja) | スケジュール管理装置およびプログラム | |
| JP2022132673A (ja) | 情報処理装置、情報処理方法及び情報処理プログラム | |
| US20110009131A1 (en) | Permission-Based Mobile-Device Positioning System and Method Thereof | |
| CN107888761B (zh) | 用户名修改方法、装置、移动终端和可读存储介质 | |
| JP2010130523A (ja) | 通信エリア推定サーバ、通信エリア推定システム及び通信エリア推定方法 | |
| CN118555544B (zh) | 定位精度的评测方法、装置、电子设备及计算机存储介质 | |
| JP7145917B2 (ja) | 情報処理装置、情報処理方法及び情報処理プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110105 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120207 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120208 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120215 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4932809 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150224 Year of fee payment: 3 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |