JP2010096633A - Device, method, and program for determining traveling-together - Google Patents
Device, method, and program for determining traveling-together Download PDFInfo
- Publication number
- JP2010096633A JP2010096633A JP2008267664A JP2008267664A JP2010096633A JP 2010096633 A JP2010096633 A JP 2010096633A JP 2008267664 A JP2008267664 A JP 2008267664A JP 2008267664 A JP2008267664 A JP 2008267664A JP 2010096633 A JP2010096633 A JP 2010096633A
- Authority
- JP
- Japan
- Prior art keywords
- distance
- data
- calculated
- determination
- degree
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images














Landscapes
- Navigation (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
Abstract
Description
この発明は、例えばGPS(Global Positioning System)を利用して得た二者の位置情報履歴をもとに、当該二者が同行しているか否かを判定する同行判定装置とその方法及びプログラムに関する。 The present invention relates to a companion determination device, a method and a program for determining whether or not the two parties are accompanied based on, for example, the position information history of the two parties obtained by using GPS (Global Positioning System). .
近年、GPS等の位置計測手段を利用して自己の位置を計測し移動履歴を管理する機能を備えた携帯端末或いは車載端末が増えている。そして、最近では上記位置の移動履歴を利用して二者が同行しているか否かを判定し、その判定結果をユーザへのサービス提供に役立てる試みがなされている。二者が同行しているか否かの判定は、例えば二者の同一時刻における位置情報をもとに二者間の距離を求め、この距離を予め設定したしきい値と比較することにより行われる(例えば、特許文献1を参照。)。 In recent years, an increasing number of portable terminals or in-vehicle terminals have a function of measuring their own position by using position measurement means such as GPS and managing a movement history. Recently, an attempt has been made to determine whether or not the two are accompanied by using the movement history of the position, and to use the determination result for providing a service to the user. Whether or not the two are accompanied is determined by, for example, obtaining the distance between the two based on the positional information of the two at the same time and comparing the distance with a preset threshold value. (For example, see Patent Document 1).
ところが、前記従来の判定方法には以下のような課題があった。すなわち、一般にGPSを利用した位置計測では、上空の見通しの良くない場所では数mから数十mの誤差が発生する。そのため、計測された位置座標をそのまま使用して二者間の距離を計算すると、算出された距離に上記位置の計測誤差が含まれてしまい、同行しているか否かの判定精度が低下する。また、フィルタリングや補正を用いて座標値を加工したとしても、誤差は完全になくなるわけではない。このため、同行しているか否かの判定を二者間の距離が一定範囲内にあるという固定したしきい値で判定を行う場合、計測精度が良い場所と悪い場所が混在している位置座標データからでは精度の良い判定を行うことができない。しきい値が低い場合には、計測精度の悪い場所で一緒にいた場合の判定を誤ってします。また、計測精度の良し悪しで誤差が変わるため、一定以上の距離を保っているといった判定を行うことは困難である。 However, the conventional determination method has the following problems. That is, in general, in position measurement using GPS, an error of several meters to several tens of meters occurs in a place where the sky is not clearly visible. Therefore, if the measured position coordinates are used as they are to calculate the distance between the two, the measurement error of the position is included in the calculated distance, and the accuracy of determining whether or not the person is accompanied is reduced. Even if the coordinate value is processed using filtering or correction, the error is not completely eliminated. For this reason, when determining whether to accompany with a fixed threshold that the distance between the two is within a certain range, position coordinates where a place with good measurement accuracy and a bad place are mixed It is not possible to make a highly accurate determination from the data. If the threshold is low, the judgment is incorrect if you are together in a place with poor measurement accuracy. Further, since the error changes depending on whether the measurement accuracy is good or bad, it is difficult to make a determination that the distance is more than a certain distance.
この発明は上記事情に着目してなされたもので、その目的とするところは、位置計測手段による計測精度の良し悪しによらず常に高精度の同行判定を可能にする同行判定装置とその方法及びプログラムを提供することにある。 The present invention has been made paying attention to the above circumstances, and the object of the present invention is an accompaniment determination apparatus and method for always permitting accompaniment determination with high accuracy irrespective of whether the measurement accuracy by the position measuring means is good or bad, and To provide a program.
上記目的を達成するためにこの発明の一態様は、位置計測手段により得られる第1及び第2の移動体の各位置情報履歴をもとに、当該第1及び第2の移動体が同行しているか否かを判定する同行判定装置にあって、上記第1及び第2の移動体間の距離をその各位置情報履歴をもとに算出すると共に、上記位置計測手段が有する計測精度をもとに上記各位置情報履歴に含まれる誤差距離を算出してこの算出された各誤差距離の合計値を合成誤差距離として算出する。そして、上記算出された第1及び第2の移動体間の距離と、上記算出された合成誤差距離とをもとに、上記第1及び第2の移動体の同行度を算出し、この算出された同行度及び上記合成誤差距離を、予め設定した同行度及び合成誤差距離のしきい値と比較することにより上記第1及び第2の移動体が同行しているか否かを判定するように構成したものである。 In order to achieve the above object, according to one aspect of the present invention, the first and second moving bodies accompany the first and second moving bodies based on the position information histories of the first and second moving bodies obtained by the position measuring means. And calculating the distance between the first and second moving bodies based on their respective position information histories, and having the measurement accuracy of the position measuring means. In addition, the error distance included in each position information history is calculated, and the total value of the calculated error distances is calculated as a combined error distance. Then, based on the calculated distance between the first and second moving bodies and the calculated combined error distance, the accompanying degree of the first and second moving bodies is calculated, and this calculation is performed. It is determined whether or not the first and second moving bodies are accompanied by comparing the degree of accompaniment and the synthetic error distance with a threshold value of the degree of accompaniment and the synthetic error distance set in advance. It is composed.
したがって、この発明の一態様によれば、二者間の距離だけでなく、位置計測手段が有する計測誤差に基づく二者間の合成誤差距離が考慮された上で二者の同行度が求められ、この同行度と上記合成誤差距離をもとに、二者が同行しているか否かが判定される。このため、計測された位置座標をそのまま使用して二者間の距離を計算し同行判定を行う場合に比べ、二者が同行しているか否かを精度良く判定することが可能となる。
すなわち、この発明によれば、位置計測手段による計測精度の良し悪しによらず常に高精度の同行判定を可能にした同行判定装置とその方法及びプログラムを提供することができる。
Therefore, according to one aspect of the present invention, not only the distance between the two but also the combined error distance between the two based on the measurement error of the position measurement means is considered, and the degree of companion of the two is determined. Based on this degree of accompaniment and the composite error distance, it is determined whether or not the two are accompanying. For this reason, it is possible to accurately determine whether or not the two are accompanied by comparison with a case where the measured position coordinates are used as they are to calculate the distance between the two and perform the accompanying determination.
That is, according to the present invention, it is possible to provide an accompaniment determination apparatus and method and program that can always perform accompaniment determination with high accuracy regardless of whether the measurement accuracy of the position measurement means is good or bad.
[原理]
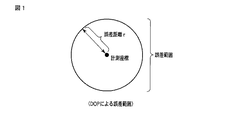
GPSの計測精度の良し悪しに応じて、同行の判定基準が変化する方法を用いる。その際、計測精度の尺度としてDOP(Dilution Of Precision)値を使用する。DOP値とは、捕捉したGPS衛星の数や配置場所、信号の強度をもとに算出される値であり、DOP値が小さいほど計測精度が高くなる。一般的にDOP値1に対して誤差5mと言われているため、DOP値に5を掛けた値を誤差距離rと定義する。
r=5×DOP値 (1)
(1) 式を定義することで計測された位置座標からの誤差範囲を図1に示すように表すことが可能である。したがって、図2に示すように人物U1と人物U2の計測された位置座標の誤差範囲どうしが重なっていれば、人物U1と人物U2は同行している可能性が高いといえる。
[principle]
A method is used in which the accompanying criteria change depending on whether the GPS measurement accuracy is good or bad. At this time, a DOP (Dilution Of Precision) value is used as a measure of measurement accuracy. The DOP value is a value calculated based on the number and location of captured GPS satellites and the signal strength. The smaller the DOP value, the higher the measurement accuracy. Since it is generally said that the error is 5 m with respect to the DOP value 1, a value obtained by multiplying the DOP value by 5 is defined as an error distance r.
r = 5 x DOP value (1)
By defining equation (1), the error range from the measured position coordinates can be expressed as shown in FIG. Therefore, if the error ranges of the measured position coordinates of the person U1 and the person U2 overlap as shown in FIG. 2, it can be said that the person U1 and the person U2 are highly likely to accompany.
図1に示す誤差範囲を描く円の半径を誤差距離rとし、この誤差距離rと二者の計測された位置座標間の距離を用いて同行しているか否かを表す確度を算出する。この発明では、この確度のことを同行度と呼ぶ。人物Aの計測された位置座標と人物Bの計測された位置座標との距離をd、人物U1の誤差距離をr1、人物U2の誤差距離をr2とした場合、同行度Fを次のように定義する。
F=1−(d/(d+r1+r2)) (2)
r1+r2を合成誤差距離Rとおくと、(2) 式は以下のように変形できる。
R=(F/(1−F))d (3)
The radius of the circle that draws the error range shown in FIG. 1 is defined as the error distance r, and the accuracy representing whether or not the error distance r and the measured position coordinates of the two are accompanied is calculated. In the present invention, this accuracy is referred to as accompaniment. When the distance between the measured position coordinates of the person A and the measured position coordinates of the person B is d, the error distance of the person U1 is r1, and the error distance of the person U2 is r2, the degree of accompaniment F is as follows: Define.
F = 1− (d / (d + r1 + r2)) (2)
When r1 + r2 is set as the synthesis error distance R, the equation (2) can be modified as follows.
R = (F / (1-F)) d (3)
(3) 式は、合成誤差距離Rを縦軸に、計測距離dを横軸にした二次元平面上における傾きF/(1−F)の直線を表す式とみなすことができる。つまり、同行度Fは合成誤差距離Rと計測距離dをそれぞれ軸とした二次元平面上における直線の傾きを示すものとなる。図3に、この同行度Fと計測距離dと合成誤差距離Rとの関係を示す。したがって、同行度Fは、二者間の計測距離dと合成誤差距離Rとの関係を表したものの区切りとして使用できる。そのため、同行度Fは計測距離dと合成誤差距離Rを考慮した同行判定のしきい値として利用可能である。 The expression (3) can be regarded as an expression representing a straight line having an inclination F / (1-F) on a two-dimensional plane with the combined error distance R as the vertical axis and the measurement distance d as the horizontal axis. That is, the degree of accompaniment F indicates the slope of a straight line on a two-dimensional plane with the combined error distance R and the measurement distance d as axes. FIG. 3 shows the relationship between the degree of accompaniment F, the measurement distance d, and the combined error distance R. Therefore, the accompaniment degree F can be used as a delimiter for the relationship between the measurement distance d between the two parties and the combined error distance R. Therefore, the accompanying degree F can be used as a threshold value for accompanying determination in consideration of the measurement distance d and the combined error distance R.
同行度を(2) 式で表すことによって、二者間の距離が単純に近いかどうかだけでなく、誤差を踏まえた上での判定ができる。したがって、この同行度Fを利用することによって、GPSによる位置座標の計測誤差を考慮した判定が可能となり、より精度の高い同行判定を行うことが可能となる。 By expressing the degree of accompaniment with equation (2), it is possible to make a judgment based on the error as well as whether the distance between the two is simply close. Therefore, by using this degree of accompaniment F, it is possible to make a determination in consideration of a measurement error of position coordinates by GPS, and it is possible to perform an accompanying determination with higher accuracy.
[実施形態]
この実施形態は、人物U1が所持する携帯端末と人物U2が所持する携帯端末がそれぞれ複数のGPS(Global Positioning System)衛星から送信されるGPS信号を受信して自端末の位置を計測し、この計測された位置情報を端末間で通信により通知して同行判定を行うもので、この同行判定において二者間の計測距離dと合成誤差距離Rを考慮した判定処理を行うようにしたものである。
[Embodiment]
In this embodiment, the mobile terminal possessed by the person U1 and the mobile terminal possessed by the person U2 respectively receive GPS signals transmitted from a plurality of GPS (Global Positioning System) satellites, measure the position of the terminal, The measured position information is communicated between the terminals and the accompanying determination is performed. In the accompanying determination, the determination process considering the measurement distance d between the two parties and the combined error distance R is performed. .
図4は、この発明の一実施形態に係わる同行判定装置を備えた携帯端末の概略構成図である。同図に示すように携帯端末10,20はいずれも、受信装置11,21と、計算装置12,22と、記録装置13,23と、データ変換装置14,24と、通信装置15,25と、同行判定装置16,26と、表示装置17,27とを備えている。
FIG. 4 is a schematic configuration diagram of a portable terminal including the accompanying determination device according to the embodiment of the present invention. As shown in the figure, each of the
受信装置11,21は、複数のGPS衛星SAT(図では簡単のため1台のみを図示)から送信されるGPS信号をそれぞれ受信する。計算装置12,22は、上記受信装置11,21により受信された各GPS信号をもとに時刻、緯度、経度及びDOP値を算出し、この算出された各値を生GPSデータとして記録装置13,23に記憶させる。データ変換装置14,24は、上記計算装置12,22により算出された生GPSデータを記録装置13,23から読み出し、日付・時刻ごとにまとめたデータに変換する。通信装置15,25は、同行判定の対象となる他者の携帯端末20,10との間で通信を行って、当該他の携帯端末20,10から上記変換後のGPSデータを受信する。同行判定装置16,26は、上記他者の携帯端末20,10から受信した変換後のGPSデータと、自端末において算出された変換後のGPSデータとをもとに同行判定のための処理を実行する。表示装置17,27は、上記同行判定装置16,26により得られた同行判定結果を表す情報を表示する。
Receiving
図5は、上記携帯端末10,20のハードウエアとソフトウエアの構成を示すブロック図である。携帯端末10,20は、マイクロプロセッサからなる中央処理ユニット(CPU;Central Processing Unit)110を備え、このCPU110にバス120を介してプログラムメモリ130及びデータメモリ140を接続し、さらにGPS受信機150、通信インタフェース160及び入出力インタフェース170を接続したものとなっている。
FIG. 5 is a block diagram showing the hardware and software configurations of the
なお、CPU110、プログラムメモリ130、データメモリ140、通信インタフェース160、入出力インタフェース170は、携帯端末の既存の構成要素と共用することが可能であり、また携帯端末がGPS受信機を元々備えている場合にはこのGPS受信機を位置計測手段として共用することが可能である。
The
GPS受信機150は図4に示した受信装置11,21に相当するもので、複数のGPS衛星SATが送信しているGPS信号をアンテナ151を介してそれぞれ受信する。
通信インタフェース160は図4に示した通信装置15,25に相当するもので、CPU110の制御の下で、例えば携帯電話網や無線LAN、WiFiにより規定される通信プロトコルに従い他者の携帯端末との間でアンテナ161を介して無線通信を行い、これにより他者の携帯端末から変換後のGPSデータを受信する。
The
The
入出力インタフェース170には、入力デバイス180及び表示デバイス190が接続される。入力デバイス180は、例えばパーソナル・コンピュータやPDA(Personal Digital Assistant)であればキーボード、携帯電話機であればダイヤルキーパッドと複数の機能キーにより構成される。なお、その他にタッチパネルなどを用いることも可能である。表示デバイス190は図4に示した表示装置17,27に相当するもので、液晶又は有機ELディスプレイからなる。入出力インタフェース170は、上記入力デバイス180による操作情報をCPU110に伝えると共に、CPU110からの表示指示に従い表示情報を上記表示デバイス190に表示させる。なお、入力デバイス180及び表示デバイス190についても、携帯端末10,20に既に設けられているものがそのまま使用される。
An
プログラムメモリ130には、この発明を実施するために必要なアプリケーション・プログラムとして、入出力制御プログラム131と、位置計測制御プログラム132と、距離算出プログラム133と、同行度算出プログラム134と、変換GPSデータ導出プログラム135と、同行データ導出プログラム136と、同行判定プログラム137が格納されている。
The
入出力制御プログラム131は、入力デバイス180において位置計測指示操作が行われた場合に、その指示情報を入出力インタフェース170を介して取り込むと共に、同行判定結果を表す情報を入出力インタフェース170に供給して表示デバイス190に表示させる処理を、CPU110に実行させる。
When a position measurement instruction operation is performed on the
位置計測制御プログラム132は、GPS受信機150により受信された各GPS信号をもとに時刻、緯度、経度及びDOP値を算出し、この算出された各値を生GPSデータとしてデータメモリ140に記憶させる処理を、CPU110に実行させる。
変換GPSデータ導出プログラム135は、上記位置計測制御プログラム132により算出された生GPSデータをデータメモリ140から読み出し、日付・時刻ごとにまとめたデータに変換する。
The position
The conversion GPS
同行データ導出プログラム136は、同行判定の対象となる他者の携帯端末との間で通信インタフェース160を利用して無線通信を行って、当該他の携帯端末から上記変換後のGPSデータを受信する処理を、CPU110に実行させる。
距離算出プログラム133は、上記同行データ導出プログラム136により他の携帯端末から受信した変換後のGPSデータと、自端末の変換後のGPSデータをもとに、他者の端末と自端末との間の距離dを算出する処理と、上記変換後のGPSデータに含まれるDOP値をもとに他者の端末の誤差距離r1と自端末の誤差距離r2との合計値である合成誤差距離Rを算出する処理を、CPU110に実行させる。
The accompanying
The
同行度算出プログラム134は、上記距離算出プログラム133により算出された他者の端末と自端末との間の計測距離dと合成誤差距離Rとをもとに、二者間の同行度Fを算出する処理を、CPU110に実行させる。
同行判定プログラム137は、上記同行度算出プログラム134により算出された同行度F及び上記距離算出プログラム133により算出された合成誤差距離Rを、予め設定された同行度及び合成誤差距離のしきい値と比較し、二者が同行しているか否かを判定する処理を、CPU110に実行させる。
The accompaniment
The accompanying
データメモリ140には、この発明を実施するために必要な情報を記憶するための記録エリアとして、位置情報記録エリア141と、距離情報記録エリア142と、生GPSデータ記録エリア143と、変換GPSデータ記録エリア144と、同行データ記録エリア145と、同行判定記録エリア146が設けられている。
The
位置情報記録エリア141には、GPS受信機150により受信された各GPS信号の受信データが記憶される。生GPSデータ記録エリア143には、上記位置計測制御プログラム132により計算された自端末の生GPSデータが格納される。距離情報記録エリア142には、上記距離算出プログラム133により算出された二者間の計測距離dが記憶される。変換GPSデータ記録エリア144には、上記変換GPSデータ導出プログラム135により算出された変換後の生GPSデータが格納される。同行データ記録エリア145には、上記同行データ導出プログラム136により算出される同行判定に必要なデータが格納される。同行判定記録エリア146には、上記同行判定プログラム137により判定された同行判定結果を表す情報が格納される。
In the position
次に、以上のように構成された携帯端末10,20による同行判定処理に係わる動作を説明する。
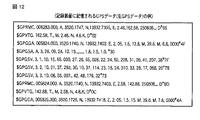
携帯端末10,20では、位置計測制御プログラム132の制御の下でGPS受信機150により複数のGPS衛星SATからのGPS信号が定期的に受信され、この受信された各GPS信号をもとに計算装置12,22により時刻、緯度、経度及びDOP値が計算されて、その算出値が生GPSデータとしてデータメモリ140の位置情報記録エリア142に記憶される。図12にこの記憶された生GPSデータの一例を示す。
Next, the operation | movement regarding the accompanying determination process by the
In the
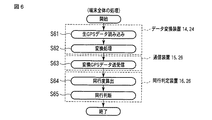
また、上記計測されたGPSデータを用いて、携帯端末10,20では以下のように同行判定に必要な一連の処理が行われる。図6はその端末全体の処理手順を示すフローチャートである。
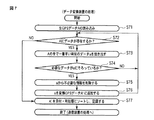
すなわち、先ずデータ変換装置14,24が動作し、上記データメモリ140内の位置情報記録エリア141から生GPSデータが読み出され(ステップS61)、この生GPSデータを同行判定に必要なデータに変換するための処理が行われる(ステップS62)。図7は、データ変換装置14,24による処理手順と処理内容を示すフローチャートである。なお、データ変換装置14,24の処理動作は同一なので、ここではデータ変換装置14の処理動作のみを説明する。
Further, using the measured GPS data, the
That is, first, the
すなわち、CPU110は、変換GPSデータ導出プログラム135の制御の下で、先ずステップS71により生GPSデータAを位置情報記録エリア141から読み込む。なお、生GPSデータAには所定のサンプリング周期、例えば1秒間ごとに得られた計測データが含まれる。CPU110は、上記読み込んだ生GPSデータAに未変換の計測データが含まれているか否かをステップS72で判定する。この結果、未変換の計測データが含まれていなければ、ステップS77に移行する。
That is, under the control of the converted GPS
一方、未変換の計測データが含まれていれば、CPU110はステップS73に移行して、計測タイミングが一番早い(最も古い)計測データaを抽出する。そして、この抽出した計測データaに緯度、経度、DOP値などの必要なデータが揃っているか否かをステップS74により調べ、もし欠如していればその計測データaを破棄してステップS72に戻る。これに対し、必要なデータが揃っていれば、ステップS75において同行判定に必要がないデータを削除したのち、ステップS76により当該計測データaを加工して変換後のGPSデータA′に追加し、ステップS72に戻る。そして、未変換の計測データがなくなるまで上記ステップS72〜ステップS76による処理を繰り返し実行する。
On the other hand, if unconverted measurement data is included, the
CPU110は、上記ステップS72〜ステップS76の処理を終了すると、ステップS77において上記変換後のGPSデータA′を日付・時刻順にソートする。そして、このソートにより並べ替えられた変換後のGPSデータA′を、データメモリ140内の変換GPSデータ記録エリア144に格納する。図13にこの変換GPSデータ記録エリア144に格納された変換後のGPSデータA′の一例を示す。
When the processing of steps S72 to S76 is completed,
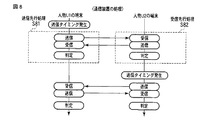
次に、携帯端末10,20間では、通信装置15,25により変換後のGPSデータA′の送受信が行われる(ステップS63)。この端末10,20間における変換後GPSデータA′の送受信処理は、大きく分けて送信先行処理と受信先行処理の2つに分けられる。図8はこの通信装置15,25による送受信処理の手順と内容を示すフローチャートである。
Next, the converted GPS data A ′ is transmitted and received between the
すなわち、通信装置15,25は常時受信待機状態に設定されており、相手端末からの変換後GPSデータA′を受信可能となっている。この状態で、端末U1においてユーザが入力デバイス180を操作して同行判定指示を入力するか、又は予め設定した送信タイミングになったとする。そうすると、通信装置15ではステップS81により送信先行処理が行われ、指定された相手端末20へ上記変換後のGPSデータA′が送信される。一方、相手端末20の通信装置25ではステップS82により受信先行処理が行われ、上記端末10から送信された変換後のGPSデータA′を受信すると共に、自端末20の変換後のGPSデータB′を端末10へ送信する処理が行われる。
That is, the
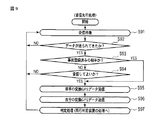
上記受信先行処理は以下のように行われる。図9はその処理手順と処理内容を示すフローチャートである。
すなわち、CPU110は、ステップS92において他の端末からのデータの到来を監視しており、通信インタフェース160により変換GPSデータが受信されると、その送信元の端末が事前に登録された端末であるか否かをステップS93で判定する。その結果、送信元の端末が登録済みの端末であれば、ステップS95により、上記送られてきた変換GPSデータを受信してデータメモリ140に格納する。そして、ステップS96により、データメモリ140内の変換GPSデータ記録エリアから自端末の変換GPSデータを読み出し、通信インタフェース160から上記送信元の端末へ送信する。
The reception preceding process is performed as follows. FIG. 9 is a flowchart showing the processing procedure and processing contents.
That is,
これに対し、上記送信元の端末が未登録の端末であれば、CPU110はステップS94に移行して、上記送られてきた変換GPSデータを受信しても良いか否かをユーザに問い合わせるためのメッセージを生成し、入出力インタフェース170を介して表示デバイス190に表示させる。この状態で、ユーザが入力デバイス180において受信を許可する操作を行うと、上記ステップS95及びS96による変換GPSデータの受信及び送信処理を行う。なお、ユーザが受信を拒否する操作を行った場合には、その旨の応答メッセージを送信元の端末へ返送した後、ステップS91による受信待機処理に戻る。
On the other hand, if the transmission source terminal is an unregistered terminal, the
一方、送信先行処理は以下のように行われる。図10はその処理手順と処理内容を示すフローチャートである。
すなわち、CPU110は、先ずステップS101によりデータメモリ140内の変換GPSデータ記録エリアから自端末の変換GPSデータを読み出し、通信インタフェース160から、事前に指定された相手先の端末へ送信する。そして、この送信後にステップS102において送信相手端末からの応答を待つ。この状態で、送信相手端末から受信を拒否する旨の応答メッセージが到来せず、変換GPSデータが送られると、この変換GPSデータをステップS103により受信してデータメモリ140に格納し、ステップS104による同行判定処理に移行する。これに対し、上記受信拒否メッセージが到来した場合には、同行判定処理に移行せずにそのまま処理を終了する。
On the other hand, the transmission advance processing is performed as follows. FIG. 10 is a flowchart showing the processing procedure and processing contents.
That is, the
次に、携帯端末10,20では同行判定装置16,26が起動して、変換後GPSデータを受信した相手端末と自端末が同行しているか否かを判定する処理が行われる。この同行判定装置16,26による同行判定処理は、前処理部S110と、同行度を算出する処理部S120と、判定処理S130に分けられる。図11はその処理手順と処理内容を示すフローチャートである。
Next, in the
先ず、前処理部S110においてCPU110は、ステップS111によりデータメモリ140内の変換GPSデータ記録エリア144から、自端末の変換後GPSデータA′と相手端末から受信した変換後GPSデータB′を読み出す。そして、ステップS112により、上記読み出した変換後GPSデータA′,B′のサンプリングレートをそれぞれ確認し、どちらかのサンプリングレートが1秒になっていなければ、このサンプリングレートが1秒になるようにステップS113で補間する。そして、ステップS114により、判定開始時刻を上記変換後GPSデータA′,B′のうち判定開始時刻の遅い方に合わせ、当該判定開始時刻以前の時刻のデータは削除する。なお、上記へ補間の方法としては、例えば存在しない秒数の計測データをその前後の時刻の計測データから線形補間する方法が用いられる。
First, in the preprocessing unit S110, the
次に、同行度算出部S120においてCPU110は、同行度算出プログラム134の制御の下で以下のように同行度を算出する。すなわち、先ずステップS121により上記変換後GPSデータA′,B′の両方に計測データが含まれているか否かを判定する。この判定の結果、いずれか一方でも計測データが含まれていなければステップS130による判定処理に移行する。
Next, in the accompanying degree calculation unit S120, the
これに対し上記変換後GPSデータA′,B′の両方とも計測データが含まれていれば、ステップS122により、上記変換後GPSデータA′,B′からそれぞれ時刻が最も早い、つまり最も古い計測データα,βを抽出し、この抽出した計測データα,βが同一時刻か否かをステップS123で確認する。この確認の結果、同一時刻であればステップS124に移行し、上記抽出した計測データα,βから端末間の計測距離d、合成誤差距離R及び同行度Fをそれぞれ算出して、この算出された各値を同行データf1に追加する。上記同行度Fの算出は先に述べた(2) 式により行われる。また、同行データf1はデータメモリ140内の同行データ記録エリア145に格納される。この計測距離d、合成誤差距離R及び同行度Fの算出処理は、上記変換後GPSデータA′,B′に含まれる全ての計測データに対し時刻が古い順に繰り返し行われる。
On the other hand, if both of the converted GPS data A ′ and B ′ contain measurement data, in step S122, the converted GPS data A ′ and B ′ have the earliest time, that is, the oldest measurement. Data α and β are extracted, and it is checked in step S123 whether or not the extracted measurement data α and β are at the same time. As a result of this confirmation, if it is the same time, the process proceeds to step S124, and the measurement distance d, the combined error distance R, and the accompaniment degree F between the terminals are calculated from the extracted measurement data α, β, respectively. Each value is added to the accompanying data f1. The accompaniment degree F is calculated by the equation (2) described above. The accompanying data f1 is stored in the accompanying
これに対し上記ステップS123において、上記抽出した計測データα,βが同一時刻ではなかったとする。この場合CPU110は、ステップS125に移行して、計測データαの時刻の方が計測データβの時刻より早く、かつ変換後GPSデータA′に計測データが存在すれば、ステップS126に移行する。そして、変換後GPSデータA′から時刻が次に古い計測データを抽出してこのデータをステップS122でαとし、上記ステップS123以降の処理を繰り返す。
In contrast, in step S123, it is assumed that the extracted measurement data α and β are not the same time. In this case, the
一方、計測データαの時刻の方が計測データβの時刻より遅ければ、CPU110はステップS127に移行して、計測データβの時刻の方が計測データαの時刻より早く、かつ変換後GPSデータA′に計測データが存在するか否かを判定する。この判定の結果、計測データβの時刻の方が計測データαの時刻より早く、かつ変換後GPSデータA′に計測データが存在すれば、ステップS128に移行する。そして、変換後GPSデータB′から時刻が次に古い計測データを抽出してこのデータをステップS122でβとし、上記ステップS123以降の処理を繰り返す。なお、上記ステップS125,S127による判定の結果、変換後GPSデータA′,B′のいずれにも計測データが存在しなくなれば、判定部S130の処理に移行する。
図14に、以上の同行度算出部S120により算出された計測距離d、合成誤差距離R及び同行度Fの一例を示す。
On the other hand, if the time of the measurement data α is later than the time of the measurement data β, the
FIG. 14 shows an example of the measurement distance d, the combined error distance R, and the accompanying degree F calculated by the accompanying degree calculating unit S120.
最後に、判定部S130においてCPU110は、同行判定プログラム137の制御の下で以下のように同行度を算出する。すなわち、ステップS131において、データメモリ140内の同行データ記録エリア145から日付・時刻が古い順に同行データを読み出す。そして、この読み出された同行データを別途定めた時間間隔Tで平均化し、この平均化された同行データを別途定めた判定ルールに従い判定することにより、同行しているか否かを判定する。そして、この判定結果をデータメモリ140内の同行判定記録エリア146に格納する。
なお、上記平均化の方法としては、時刻が時間間隔T内に含まれる計測距離d、合成誤差距離R及び同行度Fをそれぞれ足し合わせ、この足し合わせた結果を上記時間間隔T内に含まれる時刻の数で割る方法が用いられる。
Finally, in the determination unit S130, the
As the averaging method, the measurement distance d, the combined error distance R, and the accompaniment degree F whose time are included in the time interval T are added together, and the added result is included in the time interval T. A method of dividing by the number of times is used.
また判定ルールとしては、同行度Fと計測距離d、合成誤差距離Rの関係から定める基準が用いられる。例えば、同行度のしきい値として0.35と0.45の2つを設定し、さらに合成誤差距離のしきい値として30mを設定する。そして、
同行度F≦0.35であれば非同行
0.35<同行度F<0.45の場合には、合成誤差距離Rが30m以下であれば非同行で30mを超えていれば同行
同行度F≧0.45であれば同行 …(3)
と判定するものとする。
Further, as a determination rule, a standard determined from the relationship between the degree of accompaniment F, the measurement distance d, and the combined error distance R is used. For example, two threshold values of 0.35 and 0.45 are set as the accompaniment threshold value, and 30 m is set as the threshold value of the combined error distance. And
Accompanying if the degree of accompaniment F ≦ 0.35, if accommodating 0.35 <Accompanying degree F <0.45, if the combined error distance R is 30 m or less If F ≧ 0.45, accompany… (3)
It shall be judged.
図15は、図14に示した同行データに対し、時間間隔TをT=1分としたときの上記判定ルール(3) を適用して同行判定を行った結果を示すもので、同行と判定したものを“yes”、非同行と判定したものを“no”と表示している。同図に示した例では、人物U1と人物U2は、時刻6:30〜6:36の期間には同行し、時刻6:37〜6:55の期間では別行動、6:56〜6:59では再度同行したと判定される。 FIG. 15 shows the result of performing the accompany determination by applying the determination rule (3) when the time interval T is set to T = 1 minute for the accompany data shown in FIG. "Yes" is displayed for those that have been performed, and "no" is displayed for those determined to be non-accompanying. In the example shown in the figure, the person U1 and the person U2 accompany during the period from 6:30 to 6:36, and perform different actions during the period from 6:37 to 6:55, 6:56 to 6: In 59, it is determined that the person has accompanied again.
図16は、横軸を二者間の計測距離d、縦軸を合成誤差距離Rとした二次元平面上にデータをプロットした例を示したもので、同行していたもの(together)については黒い菱形で表し、非同行(alone)については白四角で示している。同図から明らかなように、同行中か非同行かは二者間の計測距離だけでなく、二者間の合成誤差距離によっても大きな影響を受ける。 FIG. 16 shows an example in which data is plotted on a two-dimensional plane in which the horizontal axis is the measurement distance d between the two and the vertical axis is the composite error distance R. For the accompanying data (together) It is represented by a black rhombus, and non-accompaniment (alone) is represented by a white square. As is clear from the figure, whether the person is accompanying or not accompanying is greatly influenced not only by the measurement distance between the two persons but also by the composite error distance between the two persons.
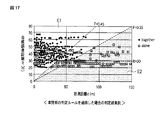
図17は、図16に示した計測距離の範囲を0〜150mとし、先に述べた本実施形態における判定ルール(3) を適用して同行判定を行った場合の判定結果を示すものである。同図において、網掛けがない領域E1は「同行」と判定する領域、網掛けした領域E2は「非同行」と判定する領域である。また、図16と同様に同行していたもの(together)については黒い菱形で表し、非同行(alone)については白四角で示している。
上記判定ルール(3) を適用して同行判定をした結果、正解率は95.3%となった。ちなみに、しきい値を単純に0.4として判定を行った場合には、正解率は91.15%となり、判定精度の向上が確認された。
FIG. 17 shows the determination result when the range of the measurement distance shown in FIG. 16 is 0 to 150 m and the accompanying determination is performed by applying the determination rule (3) in the present embodiment described above. . In the figure, an area E1 without shading is an area determined as “accompanying”, and a shaded area E2 is an area determined as “non-accompanying”. Further, as in FIG. 16, the accompanying thing (together) is indicated by a black rhombus, and the non-accompanying (alone) is indicated by a white square.
As a result of applying the decision rule (3), the correct answer rate was 95.3%. Incidentally, when the determination was made with the threshold value simply set to 0.4, the accuracy rate was 91.15%, confirming improvement of the determination accuracy.
以上述べたようにこの実施形態では、同行判定をする際に、二者間の位置座標とDOP値をもとに計測距離dと合成誤差距離Rを算出すると共に、この算出された計測距離dと合成誤差距離Rをもとに同行度Fを算出し、この算出された同行度Fを別途定めた2つのしきい値と比較し、さらに合成誤差距離Rをそのしきい値と比較することにより、二者が同行しているか否かを判定するようにしている。 As described above, in this embodiment, when the accompanying determination is performed, the measurement distance d and the combined error distance R are calculated based on the position coordinates between the two and the DOP value, and the calculated measurement distance d is calculated. And calculating the accompanying degree F based on the combined error distance R, comparing the calculated accompanying degree F with two separately determined threshold values, and further comparing the combined error distance R with the threshold value. Thus, it is determined whether or not the two are accompanied.
したがって、二者間の計測距離だけでなく合成誤差距離Rが考慮されて同行しているか否かが判定されるので、二者間の計測距離だけを使用して同行判定を行う場合に比べ、二者が同行しているか否かを精度良く判定することが可能となる。すなわち、GPSを利用した位置計測の精度の良し悪しによらず常に高精度の同行判定が可能となる。 Therefore, since it is determined whether or not to accompany the measurement error distance R as well as the combined error distance R, compared to the case where the accompaniment determination is performed using only the measurement distance between the two. It is possible to accurately determine whether or not the two are accompanied. That is, it is possible to always carry out accompaniment determination with high accuracy regardless of the accuracy of position measurement using GPS.
図18及び図20は、二者間のある計測データ(Data1,Data2)から時間間隔T=1分で計測距離と合成誤差距離をそれぞれ平均化し、その計算値に対し先に述べた判定ルール(3) を適用して同行判定を行った本発明の判定結果の正解率と、二者間の計測距離のみを用いて同行判定を行う従来方法による判定結果の正解率を比較したものである。また、図19及び図21はそれぞれ、上記図18及び図20に示した正解率を折れ線グラフで示したものである。 FIGS. 18 and 20 show averaged measurement distances and combined error distances at a time interval T = 1 minute from certain measurement data (Data1, Data2) between the two, and the determination rule ( 3 is a comparison of the accuracy rate of the determination result of the present invention in which the accompany determination is performed by applying 3) and the accuracy rate of the determination result by the conventional method in which the accompaniment determination is performed using only the measurement distance between the two parties. FIGS. 19 and 21 show the correct answer rates shown in FIGS. 18 and 20 in a line graph, respectively.
上記図18及び図20の縦方向のカラムは同行判定を行う手法を示している。上記図18及び図20に記述した従来方法は、計測距離をしきい値として同行判定している手法を指し、括弧内の数値(m)が計測距離のしきい値となっている。上記図18及び図20の横方向のカラムは、どの計測データを用いた場合の正解率かを示している。全体とは計測データ全てに対しての、精度(良い・悪い)とはDOP値が低い・高い場合の、同行(良い・悪い)とは同行していた時間の中からDOP値が低い・高い場合の、それぞれのデータに対して正解率を求めたものである。なお、この比較において、DOP値が低いか高いかを判定するしきい値は5としている。一般的にDOP値が5以下であれば信用できるといわれているため、この比較においてもこの5を使用した。 The vertical columns in FIG. 18 and FIG. 20 show a method for performing the accompany determination. The conventional method described in FIG. 18 and FIG. 20 indicates a method in which accompaniment determination is performed using a measurement distance as a threshold value, and a numerical value (m) in parentheses is a threshold value of the measurement distance. The horizontal columns in FIG. 18 and FIG. 20 indicate which measurement data is used for the correct answer rate. Overall, accuracy (good / bad) for all measured data is low / high DOP value, and accompanying (good / bad) DOP value is low / high from the time spent accompanying In this case, the correct answer rate is obtained for each data. In this comparison, the threshold value for determining whether the DOP value is low or high is 5. Since it is generally said that the DOP value is 5 or less, it is said that the DOP value is reliable.
図18及び図20から明らかなように、どちらの計測データ(Data1,Data2)に対しても、この発明による判定方法によれば、どの従来方法と比べて正解率の平均値が高くかつ分散がもとも小さいことが分かる。すなわち、この発明による判定方法を採用することにより、安定して高精度の判定結果を得ることができる。特に、GPSの計測精度が劣化している状態で良好な正解率を得ることができ、またGPSの計測精度が比較的良好な状態でも良好な正解率を維持することができる。 As is apparent from FIGS. 18 and 20, the average value of the correct answer rate is higher and the variance is greater than any of the conventional methods according to the determination method according to the present invention for both measurement data (Data1, Data2). You can see that it is small. That is, by adopting the determination method according to the present invention, a highly accurate determination result can be obtained stably. In particular, a good accuracy rate can be obtained when the GPS measurement accuracy is degraded, and a good accuracy rate can be maintained even when the GPS measurement accuracy is relatively good.
ちなみに、従来方法では、しきい値によって判定結果が大きく左右され、GPSの計測精度によるばらつきも大きい。このため、GPSの計測精度が比較的良好な場所と良くない場所を行き来しているときの計測データが与えられた場合に、従来方法ではその影響を大きく受けて安定な判定結果が得られない。 Incidentally, in the conventional method, the determination result is greatly influenced by the threshold value, and the variation due to the GPS measurement accuracy is also large. For this reason, when measurement data is given when going back and forth between a place where the GPS measurement accuracy is relatively good and a place where the measurement accuracy is not good, the conventional method is greatly affected by that and a stable determination result cannot be obtained. .
なお、この発明は上記実施形態に限定されるものではない。例えば、前記実施形態では同行度のしきい値として0.35と0.45の2つの値を用いたが、これらの値は他の値であってもよい。また、合成誤差距離のしきい値についても30mに限らず他の値を使用してもよい。 The present invention is not limited to the above embodiment. For example, in the above embodiment, two values of 0.35 and 0.45 are used as the threshold value of the accompaniment degree, but these values may be other values. Further, the threshold value of the composite error distance is not limited to 30 m, and other values may be used.
さらに、前記実施形態では位置計測手段としてGPSを用いた場合を例にとって説明した。しかし、それに限定されるものではなく、例えば移動通信網の基地局から提供される位置座標データとその精度を表すデータを用いて本発明の同行判定を実施するようにしてもよい。 Further, in the above embodiment, the case where GPS is used as the position measuring means has been described as an example. However, the present invention is not limited to this. For example, the accompanying determination of the present invention may be performed using position coordinate data provided from a base station of a mobile communication network and data representing the accuracy thereof.
その他、端末の種類とその構成、同行判定処理の手順とその内容、同行判定結果の用途等についても、この発明の要旨を逸脱しない範囲で種々変形して実施できる。
要するにこの発明は、上記実施形態そのままに限定されるものではなく、実施段階ではその要旨を逸脱しない範囲で構成要素を変形して具体化できる。また、上記実施形態に開示されている複数の構成要素の適宜な組み合せにより種々の発明を形成できる。例えば、実施形態に示される全構成要素から幾つかの構成要素を削除してもよい。さらに、異なる実施形態に亘る構成要素を適宜組み合せてもよい。
In addition, the type and configuration of the terminal, the procedure and contents of the accompanying determination process, the use of the accompanying determination result, and the like can be implemented with various modifications without departing from the gist of the present invention.
In short, the present invention is not limited to the above-described embodiment as it is, and can be embodied by modifying the constituent elements without departing from the scope of the invention in the implementation stage. Further, various inventions can be formed by appropriately combining a plurality of constituent elements disclosed in the embodiment. For example, some components may be deleted from all the components shown in the embodiment. Furthermore, you may combine suitably the component covering different embodiment.
10,20…携帯端末、11,21…受信装置、12,22…計算装置、13,23…記録装置、14,24…データ変換装置、15,25…通信装置、16,26…同行判定装置、17,27…表示装置、110…CPU、120…バス、130…プログラムメモリ、131…入出力制御プログラム、132…位置計測制御プログラム、133…距離算出プログラム、134…同行度算出プログラム、135…変換GPSデータ導出プログラム、136…同行データ導出プログラム、137…同行判定プログラム、140…データメモリ、141…位置情報記録エリア、142…距離情報記録エリア、143…生GPSデータ記録エリア、144…変換GPSデータ記録エリア、145…同行データ記録エリア、146…同行判定記録エリア、150…GPS受信機、151…GPS受信用のアンテナ、160…通信インタフェース、161…通信インタフェース用のアンテナ、170…入出力インタフェース、180…入力デバイス、190…表示デバイス。
DESCRIPTION OF
Claims (3)
前記第1及び第2の移動体間の距離をその各位置情報履歴をもとに算出する手段と、
前記位置計測手段が有する計測精度をもとに前記各位置情報履歴に含まれる誤差距離を算出し、この算出された各誤差距離の合計値を合成誤差距離として算出する手段と、
前記算出された第1及び第2の移動体間の距離と、前記算出された合成誤差距離とをもとに、前記第1及び第2の移動体の同行度を算出する手段と、
前記算出された同行度及び合成誤差距離を、予め設定した同行度及び合成誤差距離のしきい値と比較して、前記第1及び第2の移動体が同行しているか否かを判定する手段と
を具備することを特徴とする同行判定装置。 A companion determination device for determining whether or not the first and second moving bodies are accompanied on the basis of position information histories of the first and second moving bodies obtained by the position measuring means,
Means for calculating the distance between the first and second moving bodies based on their respective position information histories;
Means for calculating an error distance included in each position information history based on the measurement accuracy of the position measurement means, and calculating a total value of the calculated error distances as a combined error distance;
Means for calculating the degree of accompaniment of the first and second moving bodies based on the calculated distance between the first and second moving bodies and the calculated combined error distance;
Means for determining whether or not the first and second moving bodies are accompanied by comparing the calculated degree of accompaniment and the combined error distance with a preset threshold of the degree of accompaniment and the combined error distance. The accompanying determination apparatus characterized by comprising.
前記第1及び第2の移動体間の距離をその各位置情報履歴をもとに算出する過程と、
前記位置計測手段が有する計測精度をもとに前記各位置情報履歴に含まれる誤差距離を算出し、この算出された各誤差距離の合計値を合成誤差距離として算出する過程と、
前記算出された第1及び第2の移動体間の距離と、前記算出された合成誤差距離とをもとに、前記第1及び第2の移動体の同行度を算出する過程と、
前記算出された同行度及び合成誤差距離を、予め設定した同行度及び合成誤差距離のしきい値と比較して、前記第1及び第2の移動体が同行しているか否かを判定する過程と
を具備することを特徴とする同行判定方法。 A accompanying determination method for determining whether or not the first and second moving bodies are accompanied on the basis of position information histories of the first and second moving bodies obtained by the position measuring means,
Calculating the distance between the first and second moving bodies based on their respective position information histories;
Calculating the error distance included in each position information history based on the measurement accuracy of the position measurement means, and calculating the total value of the calculated error distances as a combined error distance;
Calculating the degree of accompaniment of the first and second moving bodies based on the calculated distance between the first and second moving bodies and the calculated combined error distance;
A step of comparing the calculated degree of accompaniment and the combined error distance with a preset threshold of the degree of accompaniment and the combined error distance to determine whether or not the first and second moving bodies are accompanied. The accompaniment determination method characterized by comprising.
前記第1及び第2の移動体間の距離をその各位置情報履歴をもとに算出する処理と、
前記位置計測手段が有する計測精度をもとに前記各位置情報履歴に含まれる誤差距離を算出し、この算出された各誤差距離の合計値を合成誤差距離として算出する処理と、
前記算出された第1及び第2の移動体間の距離と、前記算出された合成誤差距離とをもとに、前記第1及び第2の移動体の同行度を算出する処理と、
前記算出された同行度及び合成誤差距離を、予め設定した同行度及び合成誤差距離のしきい値と比較して、前記第1及び第2の移動体が同行しているか否かを判定する処理と
を、前記コンピュータに実行させることを特徴とするプログラム。 A program for determining whether or not the first and second moving bodies are accompanied by using a computer based on the position information histories of the first and second moving bodies obtained by the position measuring means. And
A process for calculating the distance between the first and second moving bodies based on their respective position information histories;
A process of calculating an error distance included in each position information history based on the measurement accuracy of the position measurement unit, and calculating a total value of the calculated error distances as a combined error distance;
Processing for calculating the degree of accompaniment of the first and second moving bodies based on the calculated distance between the first and second moving bodies and the calculated combined error distance;
A process of comparing the calculated degree of accompaniment and the combined error distance with a preset threshold of the degree of accompaniment and the combined error distance to determine whether or not the first and second moving bodies are accompanied. Is executed by the computer.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008267664A JP4932809B2 (en) | 2008-10-16 | 2008-10-16 | Accompanying determination device, method and program thereof |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008267664A JP4932809B2 (en) | 2008-10-16 | 2008-10-16 | Accompanying determination device, method and program thereof |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010096633A true JP2010096633A (en) | 2010-04-30 |
| JP4932809B2 JP4932809B2 (en) | 2012-05-16 |
Family
ID=42258422
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008267664A Expired - Fee Related JP4932809B2 (en) | 2008-10-16 | 2008-10-16 | Accompanying determination device, method and program thereof |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4932809B2 (en) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012010103A (en) * | 2010-06-24 | 2012-01-12 | Fujitsu Ltd | Position monitoring device, position monitoring program, and position monitoring method |
| JP2012034313A (en) * | 2010-08-03 | 2012-02-16 | National Institute Of Information & Communication Technology | Portable terminal transmission radio wave measuring apparatus, and measuring method thereof |
| JP2012123702A (en) * | 2010-12-10 | 2012-06-28 | Kddi Corp | Accompaniment determination device for estimating accompaniment state of multiple mobile terminals, mobile terminal, program, and method |
| JP2015005103A (en) * | 2013-06-20 | 2015-01-08 | ヤフー株式会社 | Accompanying determination device, accompanying determination method, and program |
| JP2015090354A (en) * | 2013-11-07 | 2015-05-11 | 富士通株式会社 | Determination device, determination program and determination method |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003021674A (en) * | 2001-07-09 | 2003-01-24 | Tomomi Makino | System for guiding operator of node to present position of another node |
| JP2007102357A (en) * | 2005-09-30 | 2007-04-19 | Toyota Central Res & Dev Lab Inc | Vehicle control system |
| JP2008113184A (en) * | 2006-10-30 | 2008-05-15 | Nec Corp | Position monitoring system, position monitoring device, and position monitoring method, and mobile terminal |
-
2008
- 2008-10-16 JP JP2008267664A patent/JP4932809B2/en not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003021674A (en) * | 2001-07-09 | 2003-01-24 | Tomomi Makino | System for guiding operator of node to present position of another node |
| JP2007102357A (en) * | 2005-09-30 | 2007-04-19 | Toyota Central Res & Dev Lab Inc | Vehicle control system |
| JP2008113184A (en) * | 2006-10-30 | 2008-05-15 | Nec Corp | Position monitoring system, position monitoring device, and position monitoring method, and mobile terminal |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012010103A (en) * | 2010-06-24 | 2012-01-12 | Fujitsu Ltd | Position monitoring device, position monitoring program, and position monitoring method |
| JP2012034313A (en) * | 2010-08-03 | 2012-02-16 | National Institute Of Information & Communication Technology | Portable terminal transmission radio wave measuring apparatus, and measuring method thereof |
| JP2012123702A (en) * | 2010-12-10 | 2012-06-28 | Kddi Corp | Accompaniment determination device for estimating accompaniment state of multiple mobile terminals, mobile terminal, program, and method |
| JP2015005103A (en) * | 2013-06-20 | 2015-01-08 | ヤフー株式会社 | Accompanying determination device, accompanying determination method, and program |
| JP2015090354A (en) * | 2013-11-07 | 2015-05-11 | 富士通株式会社 | Determination device, determination program and determination method |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4932809B2 (en) | 2012-05-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10044851B2 (en) | Methods, systems, and computer program products for schedule management based on locations of wireless devices | |
| US9386409B2 (en) | LBS-based prompt information output method and system, and storage medium | |
| US10061854B2 (en) | Trusted maps: updating map locations using trust-based social graphs | |
| KR101497778B1 (en) | Determination of time zone and dst participation | |
| US20130225196A1 (en) | Geo-Fence Generation and Updating Based on Device Movement Patterns | |
| JP4932809B2 (en) | Accompanying determination device, method and program thereof | |
| US8660587B2 (en) | Method for providing position information using time period | |
| JP4074277B2 (en) | Communication service system, mobile communication terminal and server | |
| JP5169674B2 (en) | POSITION INFORMATION ACQUISITION SYSTEM, POSITION INFORMATION ACQUISITION METHOD, MOBILE COMMUNICATION TERMINAL, AND PROGRAM | |
| EP1932321A1 (en) | System and method of obtaining directions to scheduling events | |
| EP2571232B1 (en) | Information processing device, information processing method, and program | |
| CA2814547A1 (en) | Device and method for creating data records in a data-store based on messages | |
| CN102656871A (en) | Method, apparatus and computer program to perform location specific information retrieval using a gesture-controlled handheld mobile device | |
| TW201445172A (en) | Methods and apparatuses for characterizing and affecting mobile device location accuracy and/or uncertainty | |
| JP2016519283A (en) | Mobile device positioning in response to externally generated region candidate positioning mode selection | |
| KR20210031166A (en) | Apparatus for precise positioning compensation using positioning difference and method thereof | |
| JP2017138262A (en) | Position estimation system | |
| CN103036953A (en) | Method and device for providing dynamic location information for users | |
| JP2017531784A (en) | Method for detecting position of mobile computing device and mobile computing device performing the same | |
| CN103900601A (en) | Event reminding method and device based on navigation map | |
| CN108093374B (en) | Stroke management method and device, storage medium and terminal equipment | |
| CN111292148A (en) | Order information processing method, device, server, terminal and storage medium | |
| JP2016099820A (en) | Information processing system, information processing terminal, and program | |
| US20110009131A1 (en) | Permission-Based Mobile-Device Positioning System and Method Thereof | |
| JP5308374B2 (en) | Schedule management apparatus and program |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110105 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120207 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120208 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120215 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 4932809 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150224 Year of fee payment: 3 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |