以下、本発明の実施形態に係る神経刺激システムの一例を、図面を参照しながら説明する。しかしながら、本発明は以下の例に限定されるものではない。
[神経刺激システムの構成]
まず、本実施形態の神経刺激システムの構成について説明する。図1に、本実施形態の神経刺激システムの概略ブロック構成を示す。なお、本実施形態では、頭痛(片頭痛や群発頭痛等)を緩和する神経刺激システムを例に挙げて説明する。
神経刺激システム100は、体内に植え込まれるリードレスタイプの神経刺激装置10と、神経刺激装置10の動作を通信により操作して制御するコントローラ20とで構成される。なお、神経刺激装置10は生体適合性を有したケースに密封され、そのケース上に刺激電極が設けられる。そして、神経刺激装置10は、患者(不図示)の頚背部の後頭神経近くの皮下に植え込まれ、この神経刺激装置10が植え込まれている部位の皮膚上にコントローラ20を置くことで通信することができる。以下、神経刺激システム100を構成する各部の機能及び動作を簡単に説明する。各部の詳細な処理動作は、後述する神経刺激システム100の動作説明で述べる。
神経刺激装置10は、第1送受信部11、コマンド受信部12(制御信号受信部)、制御部13及び刺激信号発生部14を含む。なお、図1に示す神経刺激装置10では、主に本発明の効果を奏するために必要な構成部分を示しており、その他の構成部分は省略している。
第1送受信部11と後述するコントローラ20の第2送受信部21は通信用のコイル(不図示)をそれぞれ備えており、第1送受信部11は、コントローラ20の第2送受信部21との間で、所定の信号を電磁誘導等の作用により送受信する。なお、後述するように、神経刺激装置10とコントローラ20と間の通信状況(両者の間で通信が確立されているか否か)は、第1送受信部11及び第2送受信部21で監視する。
コマンド受信部12は、その入力端子が第1送受信部11に接続されており、第1送受信部11で受信する受信信号のうち、コントローラ20から送信される刺激強度の調節に関する各種制御信号(後述する第1及び第2コマンド)を受信する。そして、コマンド受信部12は、その出力端子が制御部13に接続されており、受信した制御信号を制御部13に出力する。
制御部13は、その出力端子が刺激信号発生部14に接続されており、入力された制御信号に基づいて、刺激信号発生部14から発生される神経刺激信号の強度(刺激強度)を制御する。なお、制御部13は、クロック信号発生部(不図示)やパラメータ調節部(不図示)等から構成される。クロック信号発生部は、刺激強度の調節モード(後述する第1調節モード及び第2調節モード)に基づいて、後述する第1期間や第2期間の計時を行う。また、パラメータ調節部は、規則的に変化させる刺激強度に対応するパラメータを演算して、そのパラメータを刺激信号発生部14に出力する。刺激強度に対応するパラメータとしては、神経刺激信号のパルス間周期、パルス幅、パルス電流及びパルス電圧のうち少なくとも一つを用いることができる。
刺激信号発生部14は、制御部13から入力された信号(刺激強度に対応するパラメータ)に基づいて、それに対応した神経刺激信号を発生する。そして、刺激信号発生部14は、その出力端子が刺激電極(不図示)に接続されており、発生した神経刺激信号が後頭神経に印加される。
一方、コントローラ20は、第2送受信部21、コマンド送信部22(制御信号送信部)、クロック信号発生部23、パラメータコード特定部24、表示部25、インジケータ部26、入力部27及び最適強度決定部28を含む。なお、図1に示すコントローラ20では、主に本発明の効果を奏するために必要な構成部分を示しており、その他の構成部分は省略している。
第2送受信部21は、神経刺激装置10の第1送受信部11との間で、それぞれの通信コイル(不図示)を介して、所定の信号を電磁誘導等の作用により送受信する。また、第2送受信部21は、クロック信号発生部23に接続されており、神経刺激装置10とコントローラ20との間の通信の途絶を検出した際には、クロック信号発生部23内の後述する第2期間計時部31を選択して第2期間の計時を開始する旨の命令信号を出力する。
コマンド送信部22は、その入力端子が入力部27に接続されており、患者から入力部27を介して入力される刺激強度の調節に関する各種信号(例えば、刺激強度の調節の開始を示す信号)を取得する。そして、その取得信号に基づいて各種制御信号(後述する第1及び第2コマンド)を生成して第2送受信部21を介して神経刺激装置10に送信する。
また、コマンド送信部22はクロック信号発生部23に接続されている。コマンド送信部22は、第1コマンドを神経刺激装置10に送信した際には、クロック信号発生部23内の後述する第1期間計時部30を選択し且つ第1期間の計時を開始する旨の命令信号をクロック信号発生部23に出力する。また、コマンド送信部22は、第2コマンドを神経刺激装置10に送信した際には、クロック信号発生部23内の後述する第2期間計時部31を選択し且つ第2期間の計時を開始する旨の命令信号をクロック信号発生部23に出力する。
クロック信号発生部23は、第1期間計時部30及び第2期間計時部31を有する。また、クロック信号発生部23は、コントローラ20で刺激強度の調節過程をモニタする際に必要となる時間情報を得るために、クロック信号を発生して、そのクロック信号に基づいて刺激強度を維持する期間を計時する。より具体的には、第1期間計時部30は、後述するように刺激強度を段階的に増加させる過程で、クロック信号を発生して、そのクロック信号に基づいて刺激強度の増加過程の各段階の時間間隔(第1期間)を計時する。一方、第2期間計時部31は、後述するように刺激強度を段階的に減少させる過程で、クロック信号を発生して、そのクロック信号に基づいて刺激強度の減少過程の各段階の時間間隔(第2期間)を計時する。
また、クロック信号発生部23は、第2送受信部21、コマンド送信部22、パラメータコード特定部24及び最適強度決定部28に接続されている。そして、これらのいずれかから入力される信号に基づいて、クロック信号発生部23の動作、具体的には第1期間計時部30及び第2期間計時部31の選択動作、並びに、クロック信号の発生及び停止動作が制御される。なお、第1期間計時部30及び第2期間計時部31の出力端子は、後述するパラメータコード特定部24の演算部32に接続されており、計時している時間が第1または第2期間に達した際には、刺激強度を増加または減少させる旨の命令信号を演算部32に出力する。
パラメータコード特定部24は、演算部32、第1〜第3記憶部33〜35及びエンコード部36を有し、クロック信号発生部23から入力された信号に基づいて、調節中の刺激強度に対応するパラメータコードをリアルタイムで特定する。
第1記憶部33には、神経刺激装置10で実際に調節される刺激強度の調節過程、具体的には、刺激強度の初期値、下限値及び上限値が記憶される。第2記憶部34には、刺激強度を段階的に増加させる際の刺激強度の増分値が記憶される。そして、第3記憶部35には、刺激強度を段階的に減少させる際の刺激強度の減分値が記憶される。なお、図1の例では、第1〜第3記憶部33〜35を個別に設けた例を示しているが、本発明はこれに限定されず、第1〜第3記憶部33〜35が一つの記憶部に含まれていてもよい。
演算部32は、クロック信号発生部23及び第1〜第3記憶部33〜35に接続されている。演算部32は、クロック信号発生部23から入力される命令信号及び第1〜第3記憶部33〜35に記憶されている刺激強度の調節過程に関する各種情報に基づいて、調節中の刺激強度をリアルタイムで演算し、その演算した刺激強度に対応するパラメータコードを特定する。また、演算部32は、エンコード部36に接続されており、特定したパラメータコードをエンコード部36に出力する。
エンコード部36は、演算部32から入力されたパラメータコードをそれに対応する刺激強度の値、例えば電圧値等に変換する。そして、エンコード部36は、表示部25及びインジケータ部26に接続されており、変換した刺激強度の値を表示部25及びインジケータ部26に出力する。
表示部25は、入力された刺激強度の値を数値として表示する。一方、インジケータ部26は、刺激強度が増減した際に音を発生するとともに光を点灯させて、刺激強度が増減したことを患者に知らせる。なお、インジケータ部26で刺激強度の増減を患者に知らせる際には、音だけ発生させてもよいし、光だけを点灯させてもよい。
また、入力部27は、例えば患者が操作可能なキー、ボタン、ダイヤル等により構成される。また、入力部27は、コマンド送信部22または最適強度決定部28に接続されており、患者の所定操作を検出した際にその操作に対応する所定の命令信号をコマンド送信部22または最適強度決定部28に出力する。例えば、患者が刺激強度の調節開始を行う操作を入力部27に与えた際には、その操作を知らせる命令信号をコマンド送信部22に出力する。また、患者が最適な刺激強度を特定する操作を入力部27に与えた際には、その操作を知らせる命令信号を最適強度決定部28に出力する。なお、例えば、入力部27が複数の操作ボタンを備えている場合、刺激調節の開始等の命令信号を送る際に操作するボタンは、最適な刺激強度を決定する際に操作する操作ボタンと同じであっても良いし、異なっていてもよい。
最適強度決定部28は、入力部27、パラメータコード特定部24の出力端子及びクロック信号発生部23に接続されている。患者が最適な刺激強度と判断して入力部27に対して所定操作を行った際には、入力部27からその操作に対応する命令信号が最適強度決定部28に入力される。最適強度決定部28は、この命令信号が入力された際には、そのときのパラメータコード特定部24から出力される刺激強度の値を取得し、その値を最適刺激強度として保持する。また、その際、最適強度決定部28は、クロック信号発生部23にクロック信号の発生停止コマンドを出力する。
[刺激強度の調節モード]
次に、本実施形態の神経刺激システムにおける刺激強度の調節モードの概要を説明する。ここでは、2つの調節モードの例を説明する。1つ目の調節モードは、刺激強度を段階的に増加する過程の途中で患者が不快感または違和感を感じた場合に、その刺激強度を上限値として、その後は段階的に刺激強度を減少させる調節モード(以下、この調節モードを第1調節モードという)である。2つ目の調節モードは、刺激強度が予め設定された所定の上限値に達した場合に、その後は段階的に刺激強度を減少させる調節モード(以下、この調節モードを第2調節モードという)である。
まず、第1調節モードについて説明する。図2に、第1調節モードにおける刺激強度の調節過程を示す。具体的には、図2には、神経刺激装置10から患者に与えられるパルス状の神経刺激信号(図2中のパルス状の実線群)の時間変化の様子と、その神経刺激装置10の動作に対応するコントローラ20の動作変化を示す。
まず、患者は、神経刺激装置10が植え込まれた部位の皮膚上にコントローラ20を配置し、入力部27に対して所定の操作を行い(例えば、専用のボタン等を押して)、刺激強度調節を開始する。これによりコントローラ20から神経刺激装置10に調節開始を知らせる第1コマンド(第1の制御信号)が送信される(図2中のコントローラ20の動作M1)。この際、コントローラ20の表示部25は、刺激強度の初期値に対応するパラメータ、ここでは、電圧値を表示し、インジケータ部26は、音を発生するとともに光を点灯する。また、この際、神経刺激装置10は、所定の初期電圧値に対応する神経刺激信号を発生する。なお、図2の例では、初期電圧値は0.5Vであるが、初期電圧値はこれに限定されず、医師等により適宜設定される。例えば、初期電圧値を0Vとしてもよい。
その後、その初期電圧値を、所定の第1期間(例えば、約3秒)保持する。この間、予め定められたパルス間周期、パルス幅で神経刺激信号が発せられる。次いで、第1期間が経過すると、神経刺激装置10は、電圧値を所定の値(図2の例では0.5V)だけ増加する。この際、コントローラ20の演算部32は、調節中の刺激強度に対応する電圧値をリアルタイムで演算して求めている(モニタしている)ので、電圧値が増加した時点で、表示部25はその増加した電圧値を表示し、インジケータ部26は音を発生するとともに光を所定時間点灯する(動作M2)。
神経刺激装置10及びコントローラ20は上記動作を、電圧値を段階的に増加させながら(ここでは、0.5Vずつ上昇させながら)繰り返す(図2中の増加過程:動作M3〜M6)。なお、刺激強度の増加過程中は、コントローラ20を神経刺激装置10上に配置し続け、神経刺激装置10及びコントローラ20間で通信が確立した状態で行う。また、刺激強度の増加過程における第1期間及び電圧の増分値は、上述した例に限定されず、医師等により適宜設定される。
そして、刺激強度(電圧値)の増加過程中(電圧値が所定の上限値に達する前)に、患者が不快感または違和感を感じた場合には(図2の例では電圧値3.0Vのとき)、患者は、コントローラ20の入力部27に対して所定の操作を行い、刺激強度の増加停止を行う旨の第2コマンド(第2の制御信号)を神経刺激装置10に送信する、または、コントローラ20を神経刺激装置10から離して、両者の通信を途絶する(動作M7)。
第2コマンドを受信した、または、通信の途絶を検出した神経刺激装置10は、刺激強度の増加を停止し、その後、停止した時点の刺激強度を上限値として、その刺激強度から所定時間(第2期間)ごとに段階的に(規則的に)電圧値(刺激強度)を所定値ずつ下げる。図2の例では、電圧値の減少過程中は、0.25Vずつ下げ、各段階の期間(第2期間)は、増加過程の各段階の第1期間より長くする。例えば、第2期間は約10秒とする。この期間は制御部13の図示しないクロック信号発生部により計時される。患者は、この電圧値の減少過程において最適な刺激強度を決定するので、この減少過程では、増加過程時より、ゆっくり且つ細かく電圧値を変化させる。なお、刺激強度の減少過程における第2期間及び電圧の減分値は、上述した例に限定されず、医師等により適宜設定される。
この電圧値の減少過程においても、コントローラ20(演算部32)は、その内部で調節中の刺激強度に対応する電圧値を演算して求め続ける。この演算は、制御部13の図示しないクロック信号発生部と同時に計時を開始することにより同期されたクロック信号発生部23の出力に基づいて行なわれる。また、コントローラ20は、減少過程で電圧値が下がった時点で、表示部25はその減少した電圧値を表示し、インジケータ部26は音を発生するとともに光を点灯する(動作M8〜M10)。
また、刺激強度の減少過程中では、コントローラ20によりリアルタイムで演算(モニタ)しており、コントローラ20から神経刺激装置10に通信を介して制御信号を送信することはないので、患者は、コントローラ20を神経刺激装置10から離してよい。すなわち、刺激強度の減少過程中は、神経刺激装置10及びコントローラ20間において、通信が途絶した状態にしてもよい。この場合、患者がコントローラ20を神経刺激装置10上に保持する時間が短縮され、患者の負担が低減される。
そして、電圧値の減少過程中に、患者が最適な刺激強度と判定した場合には、患者は入力部27に対して所定の操作を行い、最適な刺激強度を確定する(動作M11)。この際、コントローラ20(最適強度決定部28)は、その最適な刺激強度を保持するとともに、刺激強度のモニタを終了する(具体的にはクロック信号発生部23でのクロック信号の発生を停止する)。なお、神経刺激装置10は、コントローラ20で最適な刺激強度を決定した後も、電圧値を、所定の下限値(図2の例では0.25V)まで段階的に下げ続ける。
そして、電圧値が所定の下限値に達した際には、神経刺激装置10は、その下限値を維持してもよいし、神経刺激信号の発生を停止してもよい。なお、電圧値の下限値は上述した例に限定されず、医師等により適宜設定される。例えば、下限値は0Vであってもよい。第1調節モードでは、上述のようにして、最適な刺激強度を決定する。
次に、第2調節モードについて説明する。図3に、第2調節モードにおける刺激強度の調節過程を示す。具体的には、図3には、神経刺激装置10から患者に与えられるパルス状の神経刺激信号(図3中のパルス状の実線群)の時間変化の様子と、その神経刺激装置10の動作に対応するコントローラ20の動作変化を示す。
まず、患者は、神経刺激装置10が植え込まれた部位の皮膚上にコントローラ20を配置し、入力部27に対して所定の操作を行い、刺激強度調節を開始する。これによりコントローラ20から神経刺激装置10に調節開始を知らせる第1コマンドが送信される(図3中のコントローラ20の動作M21)。この際、コントローラ20の表示部25は、刺激強度の初期値に対応するパラメータ(電圧値)を表示し、インジケータ部26は、音を発生するとともに光を点灯する。また、この際、神経刺激装置10は、所定の初期電圧値に対応する神経刺激信号を発生する。なお、図3の例では、初期電圧値は0.5Vであるが、初期電圧値はこれに限定されず、医師等により適宜設定される。例えば、初期電圧値を0Vとしてもよい。
その後、第1調節モードと同様に、その初期電圧値を、所定の第1期間保持する。次いで、第1期間が経過すると、神経刺激装置10は、電圧値を所定の値(図3の例では0.5V)だけ増加する。この際、コントローラ20の表示部25は、電圧値が増加した時点で、その増加した電圧値を表示し、インジケータ部26は音を発生させるとともに光を点灯する(動作M22)。
神経刺激装置10及びコントローラ20は上記動作を、電圧値を段階的に(ここでは、0.5Vずつ上昇させながら)繰り返す(動作M22〜M25)。なお、刺激強度の増加過程中は、コントローラ20を神経刺激装置10上に配置し続け、神経刺激装置10及びコントローラ20間で通信が確立した状態で行う。また、刺激強度の増加過程における第1期間及び電圧の増分値は、上述した例に限定されず、医師等により適宜設定される。
そして、予め設定された上限値(図3では電圧値5.0Vのとき)に到達するまで、患者が不快感または違和感を感じない場合には、その後、上限値から段階的に電圧値を所定値ずつ下げる。図3の例では、この電圧値の減少過程中は、0.25Vずつ下げ、各段階の第2期間は、電圧値の増加過程における各段階の第1期間より長くする。なお、刺激強度が上限値に達した際には、刺激強度が最大であることを患者に知らせるために、インジケータ部26から発生させる音及び光の形態をそれ以外の場合の形態と異ならせる(動作M26)。また、電圧値の上限値は、通常、医師が決める。
次いで、電圧値の減少過程中(動作M27以降)に、患者が最適な刺激強度と判定した場合には、患者は入力部27に対して所定の操作を行い、最適な刺激強度を決定する(動作M30)。この際、コントローラ20(最適強度決定部28)は、その最適な刺激強度を保持するとともに、刺激強度のモニタを終了する(具体的にはクロック信号発生部23でのクロック信号の発生を停止する)。一方、神経刺激装置10は、コントローラ20で最適な刺激強度を確定させた後も、電圧値を、所定の下限値まで段階的に下げ続ける。
そして、電圧値が所定の下限値に達した際には、神経刺激装置10は、その下限値を維持してもよいし、神経刺激信号の発生を停止してもよい。なお、刺激強度の減少過程における第2期間及び電圧の減分値は、上述した例に限定されず、医師等により適宜設定される。第2調節モードでは、上述のようにして、最適な刺激強度を決定する。
本実施形態の第2調節モードでは、最適な刺激強度を決定するまで、コントローラ20を神経刺激装置10上に配置し続け、神経刺激装置10及びコントローラ20間で通信が確立した状態で行う。ただし、第2調節モードでは、調節中の刺激強度は、コントローラ20によりリアルタイムで演算(モニタ)しており、また、特に電圧値の減少過程ではコントローラ20から神経刺激装置10に通信を介して制御信号を送信することはない。それゆえ、刺激強度が最大強度であることをコントローラ20が検出した後、すなわち、電圧値が減少過程に入った時点で、コントローラ20を神経刺激装置10から離すこともできる。この場合、患者がコントローラ20を神経刺激装置10上に保持する時間が短縮されるので、患者の負担が低減される。
また、患者が経験的に、あるいは病院の検査などによって、不快感または違和感を感じる刺激強度の値が明確であれば、この値に基づいて上限値(不快感または違和感を感じる刺激強度よりも若干小さい値に上限値)を定めてもよい。この場合には、第2調節モードのみを使用して、刺激強度の増加過程において、第2コマンドの受信、または、通信の途絶の検出を行うことなく上限値まで刺激強度を増加させることができる。それゆえ、この場合には、刺激強度の調節を開始した直後からコントローラ20を神経刺激装置10から離すことも可能であり、患者の負担をさらに低減することができる。
上述した調節モードの例では、刺激強度の調節過程として、最初、所定の初期値から段階的に刺激強度を増加させ、ある刺激強度(第2制御信号の受信、通信の断絶を検出、あるいは所定の上限値)以降は刺激強度を段階的に減少させる例を説明したが、本発明はこれに限定されない。例えば、患者が経験的に、あるいは病院の検査などによって刺激強度の上限値が明確で、かつその上限値の強度の刺激が突然開始しても不快感または違和感を感じることがなければ、調節時の初期値を上限値に設定して、そこから下限値まで規則的に減少し続けるように刺激強度を制御しても良い。また、調節時の初期値を所定の下限値に設定して、そこから上限値まで規則的に増加し続けるように刺激強度を制御しても良い。また、刺激強度の増加過程及び減少過程の各段階の期間も一定でなく、例えば、各段階の期間が刺激強度の増減とともに、規則的に増減させてもよい。
[神経刺激システムの刺激強度の調節処理]
次に、刺激強度調節時における神経刺激システム100の処理手順を、図面を参照しながら詳細に説明する。なお、以下の説明では、上述した第1及び第2調節モードの両方に対応可能な刺激強度の調節処理を説明する。また、神経刺激装置10の処理動作と、コントローラ20の処理動作とを個別に説明する。
(1)神経刺激装置の処理
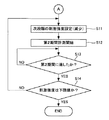
最初に、神経刺激装置10における刺激強度の調節処理について、図4及び図5を参照しながら説明する。図4及び図5は、神経刺激装置10の刺激強度調節時の処理手順を示すフローチャートである。
まず、神経刺激装置10の第1送受信部11は、コントローラ20との通信リンクが確立されているか否かを判定する(ステップS1)。コントローラ20との通信リンクが確立されていない場合、例えば、神経刺激装置10とコントローラ20とが離れている場合には、ステップS1はNO判定となり、ステップS1を繰り返す。
一方、コントローラ20との通信リンクが確立されている場合、例えば、患者がコントローラ20を神経刺激装置10が植え込まれた部位の皮膚上に配置した場合には、ステップS1はYES判定となる。この場合には、コマンド受信部12は、コントローラ20から送信される刺激強度の調節開始を知らせる第1コマンド(第1の制御信号)を受信したか否かを判定する(ステップS2)。
ここで、コマンド受信部12が第1コマンドを受信していない場合、すなわち、ステップS2でNO判定となった場合には、ステップS2を繰り返す。一方、コマンド受信部12が第1コマンドを受信した場合、すなわち、ステップS2でYES判定となった場合には、制御部13は、刺激強度を所定の初期値に設定する(ステップS3)。
次いで、制御部13は、刺激信号発生部14を制御して所定の初期値の刺激強度信号を患者に与えて、刺激強度の調節を開始する(ステップS4)。そして、制御部13は、刺激強度の増加過程における各段階での第1期間(刺激強度一定の期間)の計時を開始する(ステップS5)。
次いで、第1送受信部11は、コントローラ20との通信リンクが途絶したか否かを判定する(ステップS6)。
刺激強度の増加過程中(刺激強度が所定の上限値に達する前)に、例えば、患者が不快感または違和感を感じ、刺激強度の増加を停止するために患者がコントローラ20を神経刺激装置10から離して両者の通信を途絶した場合等には、ステップS6はYES判定となる。この場合には、図5のステップS11に移って刺激強度の減少過程を開始する。すなわち、ステップS6でYES判定となった場合には、刺激強度の調節モードは第1調節モードとなる。
一方、コントローラ20との通信リンクが確立されている場合、すなわち、ステップS6がNO判定の場合には、コマンド受信部12は、コントローラ20から送信される刺激強度の増加停止を知らせる第2コマンド(第2の制御信号)を受信したか否かを判定する(ステップS7)。
刺激強度の増加過程中に、例えば、患者が不快感または違和感を感じて、患者がコントローラ20の入力部27を操作して刺激強度の増加停止を知らせる第2コマンドを神経刺激装置10に送信した場合には、ステップS7はYES判定となる。この場合には、図5のステップS11に移って刺激強度の減少過程を開始する。すなわち、ステップS7でYES判定となった場合にも、刺激強度の調節モードは第1調節モードとなる。
一方、コマンド受信部12が第2コマンドを受信していない場合、すなわち、ステップS7でNO判定となった場合には、制御部13は、現在の刺激強度の継続時間が第1期間に達したか否かを判定する(ステップS8)。
ここで、現在の刺激強度の継続時間が第1期間に達していない場合、すなわち、ステップS8でNO判定となった場合には、ステップS6に戻り、ステップS6〜S8を繰り返す。
一方、現在の刺激強度の継続時間が第1期間に達した場合、すなわち、ステップS8でYES判定となった場合には、制御部13は、現在の刺激強度が上限値であるか否かを判定する(ステップS9)。
ここで、現在の刺激強度が上限値である場合、すなわち、ステップS9でYES判定の場合には、図5のステップS11に移って刺激強度の減少過程を開始する。すなわち、ステップS9でYES判定となった場合には、刺激強度の調節モードは第2調節モードとなる。
一方、現在の刺激強度が上限値でない場合、すなわち、ステップS9でNO判定の場合には、制御部13は、次の段階の刺激強度を設定する(ステップS10)。具体的には、刺激強度(電圧値)を所定量だけ増加する。ここで、この所定量は、コントローラ20の第2記憶部34に記憶されている増分値に対応する量である。
次いで、ステップS10で刺激強度を増加した後は、ステップS5に戻る。そして、神経刺激装置10では、ステップS6、S7及びS9のいずれかで、YES判定となるまで、ステップS5〜S10を繰り返す。
次に、ステップS6、S7及びS9のいずれかで、YES判定となった場合には、刺激強度の減少過程を開始し、制御部13は、次の段階の刺激強度を設定する(ステップS11)。そして、刺激強度(電圧値)を、コントローラ20の第3記憶部35に記憶されている減分値に対応する所定量だけ減少する。その後、制御部13は、刺激強度の減少過程における各段階での第2期間(刺激強度一定の期間)の計時を開始する(ステップS12)。
次いで、制御部13は、現在の刺激強度の継続時間が第2期間に達したか否かを判定する(ステップS13)。ここで、現在の刺激強度の継続時間が第2期間に達していない場合、すなわち、ステップS13でNO判定となった場合には、ステップS13を繰り返す。
一方、現在の刺激強度の継続時間が第2期間に達した場合、すなわち、ステップS13でYES判定の場合には、制御部13は、現在の刺激強度が下限値であるか否かを判定する(ステップS14)。ここで、現在の刺激強度が下限値でない場合、すなわち、ステップS14でNO判定の場合には、ステップS11に戻る。その後は、ステップS14でYES判定となるまで、ステップS11〜S14を繰り返す。
また、現在の刺激強度が下限値である場合、すなわち、ステップS14でYES判定の場合には、上述した刺激強度の調節を終了する。なお、この際、神経刺激装置10は、刺激強度をその下限値を維持してもよいし、神経刺激信号の発生を停止してもよい。本実施形態では、上述のようにして、神経刺激装置10は刺激強度の調節処理を行う。
(2)コントローラの処理
次に、コントローラ20における刺激強度の調節処理について、図6及び図7を参照しながら説明する。図6及び7は、コントローラ20の刺激強度調節時の処理手順を示すフローチャートである。
まず、コントローラ20の第2送受信部21は、神経刺激装置10との通信リンクが確立されているか否かを判定する(図6中のステップS21)。神経刺激装置10との通信リンクが確立されていない場合、例えば、神経刺激装置10とコントローラ20とが離れている場合には、ステップS21はNO判定となり、ステップS21を繰り返す。
一方、神経刺激装置10との通信リンクが確立されている場合、例えば、患者がコントローラ20を神経刺激装置10が植え込まれた部位の皮膚上に配置した場合には、ステップS21はYES判定となる。この場合には、コマンド送信部22は、刺激強度の調節開始を知らせる第1コマンド(第1の制御信号)を神経刺激装置10に送信する旨の命令信号が患者の入力部27への所定操作により入力されたか否かを判定する(ステップS22)。
第1コマンドを送信する旨の命令信号がコマンド送信部22に入力されていない場合、すなわち、ステップS22でNO判定の場合には、ステップS22を繰り返す。一方、第1コマンドを送信する旨の命令信号がコマンド送信部22に入力された場合、すなわち、ステップS22でYES判定の場合には、コマンド送信部22は、第1コマンドを神経刺激装置10に送信する(ステップS23)。
第1コマンドが送信されると、パラメータコード特定部24内の演算部32は、第1記憶部33に記憶されている刺激強度の初期値を読み出して、刺激強度をその初期値に設定する(ステップS24)。次いで、演算部32は、求めた(設定した)刺激強度に対応するパラメータコードをエンコード部36に出力する。エンコード部36は、演算部32から入力されたパラメータコードをそれに対応する刺激強度の値、例えば電圧値等に変換して、その変換したパラメータ値を表示部25及びインジケータ部26に出力する。
そして、インジケータ部26は、エンコード部36から入力されたパラメータ値に基づいて、音を発生するとともに光を所定時間点灯する(ステップS25)。また、この際、表示部25は、入力された刺激強度の値を数値として表示する(ステップS26)。上記ステップS23〜S26の処理工程は、図2中のコントローラ20の動作M1または図3中の動作M21に対応する。
また、第1コマンドが送信されると、コマンド送信部22は、第1コマンドを送信したことを知らせる信号をクロック信号発生部23に出力する。クロック信号発生部23は、コマンド送信部22から入力されたこの信号に基づいて、クロック信号の発生及び刺激強度の継続時間を計時する計時部として第1期間計時部30を選択する。そして、第1期間計時部30は、クロック信号の発生を開始するとともにそのクロック信号に基づいて刺激強度の継続時間の計時を開始する(ステップS27)。
次いで、コマンド送信部22は、刺激強度の増加停止を知らせる第2コマンド(第2の制御信号)を送信する旨の命令信号が患者の入力部27への所定操作により入力されたか否かを判定する(ステップS28)。
第2コマンドを送信する旨の命令信号がコマンド送信部22に入力されている場合、すなわち、ステップS28でYES判定となった場合には、コマンド送信部22は、第2コマンドを神経刺激装置10に送信する(ステップS29)。次いで、第2コマンドが送信されると、演算部32は、第3記憶部35に記憶されている刺激強度の減分値を読み出し、現在の刺激強度からその減分値を差し引いた刺激強度を算出する(ステップS30)。
そして、演算部32は、算出した刺激強度に対応するパラメータコードをエンコード部36に出力する。エンコード部36は、演算部32から入力されたパラメータコードをそれに対応する刺激強度の値、例えば電圧値等のパラメータ値に変換して、その変換したパラメータ値を表示部25及びインジケータ部26に出力する。次いで、図7中の後述するステップS38以降の刺激強度の減少過程の処理を行う。上記ステップS29〜S30、後述するステップS38及びS39の処理は、図2中のコントローラ20の動作M7に対応する。すなわち、ステップS28でYES判定となった場合には、刺激強度の調節モードは第1調節モードとなる。
一方、コマンド送信部22に第2コマンドを送信する旨の命令信号が入力されていない場合、すなわち、ステップS28でNO判定の場合には、ステップS31に移り、第2送受信部21は、神経刺激装置10との通信リンクが途絶しているか否かを判定する(ステップS31)。
神経刺激装置10との通信リンクが途絶している場合、例えば、神経刺激装置10とコントローラ20とが離れている場合には、ステップS31はYES判定となり、上述したステップS30を行う。その後は、図7中の後述するステップS38以降の減少過程の処理を行う。すなわち、ステップS31でYES判定となった場合にも、刺激強度の調節モードは第1調節モードとなる。
一方、神経刺激装置10との通信リンクが確立されている場合、例えば、患者がコントローラ20を神経刺激装置10上に配置している場合には、ステップS31はNO判定となる。この場合、第1期間計時部30は、現在の刺激強度の継続時間が第1期間に達したか否かを判定する(ステップS32)。
ここで、現在の刺激強度の継続時間が第1期間に達していない場合、すなわち、ステップS32でNO判定となった場合には、ステップS28に戻り、その後は、ステップS28以降の処理を行う。一方、現在の刺激強度の継続時間が第1期間に達している場合、すなわち、ステップS32でYES判定となった場合には、演算部32は、第2記憶部34に記憶されている刺激強度の増分値を読み出し、現在の刺激強度にその増分値を足し合わせた刺激強度を算出する(図7中のステップS33)。
次いで、演算部32は、第1記憶部33から刺激強度の上限値を読み出し、ステップS33で算出した刺激強度とその上限値を比較して、算出した刺激強度が上限値以上であるか否かを判定する(ステップS34)。
ここで、算出した刺激強度が上限値未満である場合、すなわち、ステップS34でNO判定となった場合には、上述した図6中のステップS25に戻る。この際、演算部32は、算出した刺激強度に対応するパラメータコードをエンコード部36に出力する。そして、エンコード部36は、演算部32から入力されたパラメータコードをそれに対応する刺激強度の値、例えば電圧値等のパラメータ値に変換して、その変換したパラメータ値を表示部25及びインジケータ部26に出力する。その後は、ステップS28、S31及びS34のいずれかで、YES判定となるまで、ステップS25〜S34を繰り返す。このステップS25〜S34の一連の処理は、図2中の動作M2〜M6または図3中の動作M22〜M25に対応する。
一方、算出した刺激強度が上限値以上である場合、すなわち、ステップS34でYES判定となった場合には、演算部32は、算出した刺激強度が上限値であるか否かを判定する(ステップS35)。なお、ステップS34でYES判定となった場合には、コントローラ20が第2コマンドを送信する旨の命令信号が入力部27からなく、または、神経刺激装置10との通信の途絶を検出することなく、刺激強度がその上限値に達しているので、刺激強度の調節モードは第2調節モードとなる。
ステップS35で、算出した刺激強度が上限値であると判定された場合、すなわち、ステップS35でYES判定となった場合、演算部32は、刺激強度の上限値に対応するパラメータコードをエンコード部36に出力する。エンコード部36は、演算部32から入力された刺激強度の上限値を、例えば電圧値等のパラメータ値に変換して、その変換したパラメータ値を表示部25及びインジケータ部26に出力する。次いで、インジケータ部26は、エンコード部36から入力されたパラメータ値に基づいて、音を発生するとともに光を所定時間点灯する(ステップS36)。
ただし、ステップS36では、刺激強度が上限値に達したことを患者により確実に知らせるために、音の発生形態及び光の点灯形態を、通常時(刺激強度が上限値でない場合)の形態とは変える。例えば、音を大きくしたり、音色を変えたり、光の強度を強くしたり、または、光の点滅パターンを変えたりする。その後は図6中のステップS26に戻って、ステップS26以降の処理を行う。なお、このステップS36の処理が図3中のコントローラ20の動作M26に対応する。
一方、ステップS35で、算出した刺激強度が上限値でないと判定された場合(上限値の刺激が第1期間行われた後に、算出した刺激強度が上限値+増分値となった場合)、すなわち、ステップS35でNO判定となった場合、演算部32は、第3記憶部35に記憶されている刺激強度の減分値を読み出し、刺激強度の上限値からその減分値を差し引いた刺激強度を算出する(ステップS37)。
次いで、演算部32は、算出した刺激強度に対応するパラメータコードをエンコード部36に出力する。エンコード部36は、演算部32から入力されたパラメータコードをそれに対応する刺激強度の値、例えば電圧値等のパラメータ値に変換して、その変換したパラメータ値を表示部25及びインジケータ部26に出力する。そして、インジケータ部26は、エンコード部36から入力されたパラメータ値に基づいて、音を発生するとともに光を所定時間点灯する(ステップS38)。また、この際、表示部25は、入力された刺激強度の値を数値として表示する(ステップS39)。
また、ステップS35でNO判定となった場合には、パラメータコード特定部24は、刺激強度の減少過程を開始したことを知らせる信号をクロック信号発生部23に出力する。クロック信号発生部23は、この入力信号に基づいて、クロック信号の発生及び刺激強度の継続時間を計時する計時部として第2期間計時部31を選択する。そして、第2期間計時部31は、クロック信号の発生を開始するとともにそのクロック信号に基づいて刺激強度の継続時間の計時を開始する(ステップS40)。上記ステップS37〜S40の処理は、図3中のコントローラ20の動作M27に対応する。
次いで、最適強度決定部28は、刺激強度の減少過程中に、最適強度を保持する旨の命令信号が患者の入力部27への所定操作により入力されたか否かを判定する(ステップS41)。
ここで、刺激強度の減少過程中に、患者が最適な刺激強度を決定するために入力部27に対して所定操作を行った場合、すなわち、ステップS41でYES判定となった場合には、最適強度決定部28は、クロック発生停止の命令信号をクロック信号発生部23に出力する(ステップS42)。また、この際、最適強度決定部28は、パラメータコード特定部24から出力されるパラメータコード(最適刺激強度に対応するパラメータコード)を保持し(ステップS43)、刺激強度の調節動作を終了する。このステップS42〜S43の一連の処理は、図2中のコントローラの動作M11または図3中の動作M30に対応する。
一方、最適強度決定部28に、最適強度を保持する旨の命令信号が入力されていない場合、すなわち、ステップS41でNO判定となった場合、第2期間計時部31は、現在の刺激強度の継続時間が第2期間に達したか否かを判定する(ステップS44)。
ここで、現在の刺激強度の継続時間が第2期間に達していない場合、すなわち、ステップS44でNO判定となった場合には、ステップS41に戻り、その後は、ステップS41以降の処理を行う。一方、現在の刺激強度の継続時間が第2期間に達している場合、すなわち、ステップS44でYES判定となった場合には、演算部32は、第3記憶部35に記憶されている刺激強度の減分値を読み出して、現在の刺激強度から減分値を差し引いた刺激強度を算出する(ステップS45)。
次いで、演算部32は、第1記憶部33に記憶されている刺激強度の下限値を読み出して、算出した刺激強度と下限値とを比較し、算出した刺激強度が下限値であるか否かを判定する(ステップS46)。
ここで、算出した刺激強度が下限値でない場合、すなわち、ステップS46でNO判定となった場合には、ステップS38に戻り、その後は、ステップS41及びS46のいずれかで、YES判定となるまで、ステップS38〜S46を繰り返す。このステップS38〜S46の一連の処理は、図2中の動作M8〜M10または図3中の動作M28,M29に対応する。
一方、算出した刺激強度が下限値である場合、すなわち、ステップS46でYES判定となった場合には、コントローラ20は刺激強度の調節過程のモニタを終了する。本実施形態では、上述のようにして、コントローラ20により刺激強度の調節過程をモニタし、最適な刺激強度を決定する。
その後、患者は、コントローラ20で決定した最適な刺激強度を神経刺激装置10の刺激強度としてプログラミングする。その方法としては、患者は、神経刺激装置10が植え込まれている皮膚上に、コントローラ20を配置し、入力部27に対して所定のボタン操作等を行うことにより、保持した最適な刺激強度の情報を神経刺激装置10にプログラミングする。また、コントローラ20の表示部25に表示されている最適な刺激強度を基準として、コントローラ20上で刺激強度を微調整した後にプログラミングすることも可能である。この場合、例えば、決定した最適な刺激強度よりも若干小さい刺激強度とすることにより、神経刺激装置10を駆動している電池の寿命を延ばすことができる。また、逆に、決定した最適な刺激強度よりも若干大きい刺激強度とすることにより、痛みの強度が変動したときにその都度刺激強度を変更する必要がなくなり、患者の痛みの性状やライフスタイルに応じた微調整を簡単に行うことができる。
上述のように、本実施形態の神経刺激システム100では、刺激強度の調節が開始された後、コントローラ20は、神経刺激装置10と通信することなく、調節中の刺激強度をリアルタイムでモニタすることができる。また、刺激強度の調節中には、コントローラ20は神経刺激装置10上に配置するだけであり、従来のように、コントローラ20を神経刺激装置10上においた状態で操作して刺激強度を調節する必要はない。また、神経刺激システム100の設定次第では、刺激強度の調節過程の途中(例えば減少過程)からコントローラ20を神経刺激装置10から離すことも可能である。すなわち、刺激調節中の患者の負担が低減される。それゆえ、本実施形態によれば、最適な刺激強度の設定する際の刺激強度の調節を細やかに且つ容易に行うことができる。
上記実施形態では、第1及び第2調節モードの両方に対応可能な処理手順を説明したが、本発明はこれに限定されない。患者が、第1及び第2調節モードのいずれかを選択し、第1及び第2調節モードを個別に処理する構成にしてもよい。
また、上記実施形態では、コントローラで刺激強度に対応するパラメータコードを求める(モニタする)際に、演算部で刺激強度を演算して求める例を説明したが、本発明はこれに限定されない。例えば、刺激強度の調節を開始してからの経過時間と調節する刺激強度のパラメータの関係を表すテーブルを予め記憶させておき、クロック信号発生部で発生するクロック信号をカウントし、そのカウント量(経過時間)に対応する刺激強度を所定のテーブルから選択して、調節中の刺激強度をモニタしてもよい。
上記実施形態では、頭痛を緩和するためリードレスタイプの神経刺激システムについて説明したが、本発明はこれに限定されず、本発明は、頭痛以外の様々な痛みの治療にも適用可能であり、また、従来の電極リードを用いた神経刺激システムにも適用可能である。
10…神経刺激装置、11…第1送受信部、12…コマンド受信部(制御信号受信部)、13…制御部、14…刺激信号発生部、20…コントローラ、21…第2送受信部、22…コマンド送信部(制御信号送信部)、23…クロック信号発生部、24…パラメータコード特定部、25…表示部、26…インジケータ部、27…入力部、28…最適強度決定部、30…第1期間計時部、31…第2期間計時部、32…演算部、33…第1記憶部、34…第2記憶部、35…第3記憶部、36…エンコード部、100…神経刺激システム