JP2010065666A - タービン動翼組立体およびこれを備えるタービン - Google Patents
タービン動翼組立体およびこれを備えるタービン Download PDFInfo
- Publication number
- JP2010065666A JP2010065666A JP2008235556A JP2008235556A JP2010065666A JP 2010065666 A JP2010065666 A JP 2010065666A JP 2008235556 A JP2008235556 A JP 2008235556A JP 2008235556 A JP2008235556 A JP 2008235556A JP 2010065666 A JP2010065666 A JP 2010065666A
- Authority
- JP
- Japan
- Prior art keywords
- turbine
- contact surface
- surface portion
- contact
- blade
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images














Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F01—MACHINES OR ENGINES IN GENERAL; ENGINE PLANTS IN GENERAL; STEAM ENGINES
- F01D—NON-POSITIVE DISPLACEMENT MACHINES OR ENGINES, e.g. STEAM TURBINES
- F01D5/00—Blades; Blade-carrying members; Heating, heat-insulating, cooling or antivibration means on the blades or the members
- F01D5/12—Blades
- F01D5/22—Blade-to-blade connections, e.g. for damping vibrations
- F01D5/225—Blade-to-blade connections, e.g. for damping vibrations by shrouding
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Turbine Rotor Nozzle Sealing (AREA)
Abstract
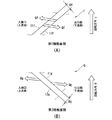
【解決手段】相隣接するタービン動翼11、12…のシュラウド16は、タービンの回転方向Uに対し鋭角αをなし相対する平坦な接触面11f、12f…を備えた第1接触面部Fと、タービンの回転方向に対し鈍角βをなし相対する平坦な接触面11g、12g…を備えた第2接触面部Gとを有し、タービン回転数の上昇過程で、第2接触面部が接触状態から分離状態に移行して第1接触面部及び第2接触面部が分離状態となり、その後、第1接触面部が分離状態から接触状態へ移行し得るよう構成されたものである。
【選択図】 図2
Description
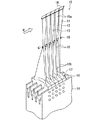
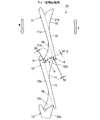
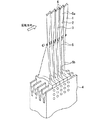
図1は、本発明に係るタービン動翼組立体における第1の実施の形態の一部を拡大し、各タービン動翼の組付け状態を示す一部拡大斜視図である。図2は、図1のタービン動翼組立体のうち、複数のシュラウドにおけるタービン停止状態を半径方向外側から見た正面図である。図3は、図1のタービン動翼組立体のうち、複数のシュラウドにおけるタービン回転数上昇中の状態を半径方向外側から見た正面図である。図4は、図1のタービン動翼組立体のうち、複数のシュラウドにおけるタービン定格回転状態を半径方向外側から見た正面図である。
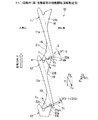
図10は、本発明に係るタービン動翼組立体における第2の実施の形態のうち、複数のシュラウドのタービン停止状態を半径方向外側から見た正面図である。図11は、図10の複数のシュラウドにおけるタービン定格回転状態を半径方向外側から見た正面図である。この第2の実施の形態において、前記第1の実施の形態と同様な部分については、同一の符号を付すことにより説明を簡略化し、または省略する。
図10及び図12に示すように、タービン動翼11、12…の組付け状態においては、隣接翼近接面部Hは、第1接触面部F及び第2接触面部Gと共に、タービン動翼11、12…の外表面に表れているので、第1接触面部F、第2接触面部G、隣接翼近接面部Hのそれぞれの間隙値を簡単に測定でき、これらの第1接触面部F、第2接触面部G、隣接翼近接面部Hの組付け時のばらつきを容易に発見できる。その結果に基づいて修正作業を適正に行うことにより、第1接触面部F、第2接触面部G、隣接翼近接面部Hの各間隙のばらつきを最小に抑えた、より信頼性の高いタービンを提供することが可能となる。
11、12…タービン動翼
11a、12a… 翼部先端
11b、12b… 前縁スナッバ
11c、12c… 後縁スナッバ
11f、12f… 接触面
11g、12g… 接触面
16 シュラウド
20 タービン動翼組立体
21b、22b… 前縁スナッバ
21c、22c、… 後縁スナッバ
21f、22f…接触面
21ga 後縁腹側面
22g 突出部先端面
21h 突出部先端面
22h 前縁背側面
F 第1接触面部
G 第2接触面部
H 隣接翼近接面部
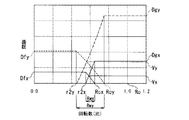
Df 間隙
Dg 間隙
Dh 間隙
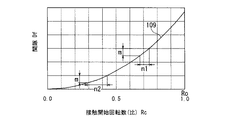
Rc 接触開始回転数
r2 分離回転数
α 鋭角
β 鈍角
Claims (7)
- 断面形状が根元から先端に向かって捻れて形成された翼部と、前記翼部の翼部先端に一体に形成されたシュラウドとを備えるタービン動翼を回転軸の周方向に複数配設し、各前記タービン動翼の前記翼部先端と前記シュラウドとを含む先端部に設けられた結合手段を用いて、これらの周方向に配設された複数の前記タービン動翼を一群に結合可能としたタービン動翼組立体であって、
相隣接する前記タービン動翼のそれぞれの前記先端部に設けられる前記結合手段は、前記回転軸の軸方向下流側へ向かってタービンの回転方向に対し鋭角をなし、周方向に隣接する前記タービン動翼の前記先端部と相対する平坦な接触面を備えた第1接触面部と、前記回転軸の軸方向下流側へ向かってタービンの回転方向に対し鈍角をなし、周方向に隣接する前記タービン動翼の前記先端部と相対する平坦な接触面を備えた第2接触面部とを有し、
前記タービンが停止した状態で前記タービン動翼ぞれぞれの前記第2接触面が、周方向に隣接する前記タービン動翼の第2接触面部と接触状態におかれるとともに、
前記タービンの回転数の上昇過程で、前記タービン動翼のぞれぞれの前記第2接触面部が接触状態から分離状態に移行して前記第1接触面部及び第2接触面部が分離状態となり、その後前記第1接触面部が分離状態から、周方向に隣接する前記タービン動翼の前記第1接触面部との接触状態へ移行し得るよう構成されたことを特徴とするタービン動翼組立体。 - 前記第1接触面部は、前記第2接触面部に対して前記回転軸の軸方向下流側に設けられたことを特徴とする請求項1に記載のタービン動翼組立体。
- 前記第1接触面部は、前記第2接触面部に対して前記回転軸の軸方向上流側に設けられたことを特徴とする請求項1に記載のタービン動翼組立体。
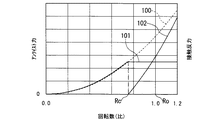
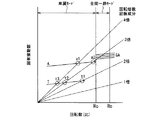
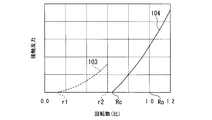
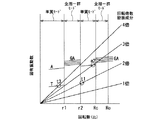
- 前記タービン回転数の上昇過程で、第1接触面部が接触状態へ移行する接触開始回転数は定格回転数の60%から75%の回転数に設定され、また、第2接触面部が接触状態から分離状態に移行する分離回転数は、前記第1接触面部の前記接触開始回転数よりも、定格回転数の5%から20%低く設定されたことを特徴とする請求項1に記載のタービン動翼組立体。
- 前記タービン動翼のそれぞれにおける前記シュラウドは、前記翼部先端の背側から突出する前縁スナッバと、腹側から突出する後縁スナッバとを備え、
前記第1接触面部は、前記前縁スナッバの前縁側と後縁スナッバの後縁側に設けられ、
前記第2接触面部は、前記前縁スナッバに設けられた前記第1接触面部における前記回転軸の軸方向下流側と、前記翼部先端の後縁側における腹側に設けられたことを特徴とする請求項3に記載のタービン動翼組立体。 - 前記タービン動翼のそれぞれにおける前記シュラウドは、前記翼部先端の背側から突出する前縁スナッバと、腹側から突出する後縁スナッバとを備え、
前記後縁スナッバに設けられた前記第1接触面部の前記回転軸の軸方向上流側には、周方向に隣接する前記タービン動翼の前記先端部と間隙を有して相対する隣接翼近接面部が設けられたことを特徴とする請求項3または5に記載のタービン動翼組立体。 - ケーシングと、
前記ケーシング内に回転可能に収納される回転軸であるタービンロータとを備え、
前記タービンロータに請求項1から6のいずれか1項に記載のタービン動翼組立体を設けたことを特徴とするタービン。
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008235556A JP4940209B2 (ja) | 2008-09-12 | 2008-09-12 | タービン動翼組立体およびこれを備えるタービン |
| US12/467,578 US8186959B2 (en) | 2008-09-12 | 2009-05-18 | Turbine moving blade assembly and turbine having the same |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008235556A JP4940209B2 (ja) | 2008-09-12 | 2008-09-12 | タービン動翼組立体およびこれを備えるタービン |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2010065666A true JP2010065666A (ja) | 2010-03-25 |
| JP2010065666A5 JP2010065666A5 (ja) | 2010-12-09 |
| JP4940209B2 JP4940209B2 (ja) | 2012-05-30 |
Family
ID=42007400
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008235556A Active JP4940209B2 (ja) | 2008-09-12 | 2008-09-12 | タービン動翼組立体およびこれを備えるタービン |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US8186959B2 (ja) |
| JP (1) | JP4940209B2 (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013148070A (ja) * | 2012-01-23 | 2013-08-01 | Toshiba Corp | タービン動翼および蒸気タービン |
| JP2013249842A (ja) * | 2012-05-31 | 2013-12-12 | Alstom Technology Ltd | プレツイステッド翼用のシュラウド |
| WO2017179711A1 (ja) * | 2016-04-14 | 2017-10-19 | 三菱日立パワーシステムズ株式会社 | 蒸気タービン動翼、蒸気タービン、及び、蒸気タービン動翼の製造方法 |
| JPWO2017179711A1 (ja) * | 2016-10-28 | 2019-04-25 | 三菱日立パワーシステムズ株式会社 | 蒸気タービン動翼、蒸気タービン、及び、蒸気タービン動翼の製造方法 |
| JP2022136620A (ja) * | 2021-03-08 | 2022-09-21 | 株式会社東芝 | タービン動翼 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP2963245A1 (de) * | 2014-07-03 | 2016-01-06 | Siemens Aktiengesellschaft | Zeitweiliges Koppeln von benachbart zueinander angeordneten Laufschaufeln |
| EP2977549B1 (fr) * | 2014-07-22 | 2017-05-31 | Safran Aero Boosters SA | Aubage de turbomachine axiale et turbomachine associée |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0216303A (ja) * | 1988-07-04 | 1990-01-19 | Toshiba Corp | タービン動翼の結合装置 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2895157B2 (ja) | 1990-04-20 | 1999-05-24 | 三菱重工業株式会社 | インテグラルシュラウド翼 |
| JP3178327B2 (ja) | 1996-01-31 | 2001-06-18 | 株式会社日立製作所 | 蒸気タービン |
-
2008
- 2008-09-12 JP JP2008235556A patent/JP4940209B2/ja active Active
-
2009
- 2009-05-18 US US12/467,578 patent/US8186959B2/en active Active
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0216303A (ja) * | 1988-07-04 | 1990-01-19 | Toshiba Corp | タービン動翼の結合装置 |
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013148070A (ja) * | 2012-01-23 | 2013-08-01 | Toshiba Corp | タービン動翼および蒸気タービン |
| JP2013249842A (ja) * | 2012-05-31 | 2013-12-12 | Alstom Technology Ltd | プレツイステッド翼用のシュラウド |
| WO2017179711A1 (ja) * | 2016-04-14 | 2017-10-19 | 三菱日立パワーシステムズ株式会社 | 蒸気タービン動翼、蒸気タービン、及び、蒸気タービン動翼の製造方法 |
| CN108884718A (zh) * | 2016-04-14 | 2018-11-23 | 三菱日立电力系统株式会社 | 汽轮机动叶片、汽轮机及汽轮机动叶片的制造方法 |
| CN108884718B (zh) * | 2016-04-14 | 2021-01-05 | 三菱动力株式会社 | 汽轮机动叶片、汽轮机及汽轮机动叶片的制造方法 |
| JPWO2017179711A1 (ja) * | 2016-10-28 | 2019-04-25 | 三菱日立パワーシステムズ株式会社 | 蒸気タービン動翼、蒸気タービン、及び、蒸気タービン動翼の製造方法 |
| JP2022136620A (ja) * | 2021-03-08 | 2022-09-21 | 株式会社東芝 | タービン動翼 |
| JP7434199B2 (ja) | 2021-03-08 | 2024-02-20 | 株式会社東芝 | タービン動翼 |
Also Published As
| Publication number | Publication date |
|---|---|
| US8186959B2 (en) | 2012-05-29 |
| JP4940209B2 (ja) | 2012-05-30 |
| US20100068061A1 (en) | 2010-03-18 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4940209B2 (ja) | タービン動翼組立体およびこれを備えるタービン | |
| RU2635734C2 (ru) | Лопатка ротора турбомашины | |
| US6033185A (en) | Stress relieved dovetail | |
| EP0985801B1 (en) | Blade configuration for steam turbine | |
| JP4713509B2 (ja) | タービン動翼 | |
| JP4058906B2 (ja) | 蒸気タービン | |
| GB2138078A (en) | Dynamic response modification and stress reduction in blade root dovetail | |
| CA2390580C (en) | Shroud integral type moving blade of a gas turbine | |
| US5829955A (en) | Steam turbine | |
| US5120197A (en) | Tip-shrouded blades and method of manufacture | |
| EP3208467B1 (en) | Compressor rotor for supersonic flutter and/or resonant stress mitigation | |
| EP1942252B1 (en) | Airfoil tip for a rotor assembly | |
| JP4335771B2 (ja) | タービン動翼及びタービン設備 | |
| US11035385B2 (en) | Fan rotor with flow induced resonance control | |
| US10634169B2 (en) | Fan rotor with flow induced resonance control | |
| WO2007105380A1 (ja) | 軸流流体機械用翼 | |
| US7513747B2 (en) | Rotor for a compressor | |
| EP3456919B1 (en) | Rotor, corresponding gas turbine engine and method of forming a rotor | |
| US20140234110A1 (en) | Turbine blade tip shroud and mid-span snubber with compound contact angle | |
| US7306434B2 (en) | Reduction of co-efficient of friction to reduce stress ratio in bearings and gas turbine parts | |
| EP2910737A1 (en) | A rotor for a turbo-machine and a related method | |
| JP2567044B2 (ja) | タービン動翼の結合装置 | |
| JP7235536B2 (ja) | 回転機械 | |
| WO2005026501A1 (ja) | タービン動翼 | |
| GB2455431A (en) | Split shank rotor blade |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| RD04 | Notification of resignation of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7424 Effective date: 20100424 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101022 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20101022 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20111013 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111018 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111110 |
|
| RD01 | Notification of change of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7421 Effective date: 20111217 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20120131 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20120227 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150302 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4940209 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20150302 Year of fee payment: 3 |