JP2010051061A - サーボ解析機能を備えたシミュレーションシステム - Google Patents
サーボ解析機能を備えたシミュレーションシステム Download PDFInfo
- Publication number
- JP2010051061A JP2010051061A JP2008210945A JP2008210945A JP2010051061A JP 2010051061 A JP2010051061 A JP 2010051061A JP 2008210945 A JP2008210945 A JP 2008210945A JP 2008210945 A JP2008210945 A JP 2008210945A JP 2010051061 A JP2010051061 A JP 2010051061A
- Authority
- JP
- Japan
- Prior art keywords
- real
- transfer function
- model
- block
- time simulator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
- 238000004088 simulation Methods 0.000 title claims abstract description 20
- 238000004458 analytical method Methods 0.000 title claims abstract description 15
- 238000012546 transfer Methods 0.000 claims abstract description 48
- 238000005259 measurement Methods 0.000 claims abstract description 28
- 238000010586 diagram Methods 0.000 description 13
- 238000004364 calculation method Methods 0.000 description 9
- 238000013178 mathematical model Methods 0.000 description 5
- 238000012937 correction Methods 0.000 description 2
- 238000013480 data collection Methods 0.000 description 2
- 230000005284 excitation Effects 0.000 description 1
- 238000000034 method Methods 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 238000001228 spectrum Methods 0.000 description 1
Images





Landscapes
- Feedback Control In General (AREA)
- Control Of Electric Motors In General (AREA)
Abstract
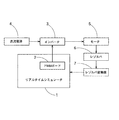
【解決手段】サーボ解析機能を備えたシミュレーションシステムは、制御器と等価な応答を実時間で演算して出力するモデルベースなリアルタイムシミュレータ1を備え、リアルタイムシミュレータ1を実機からなるモータ5(制御対象)に接続し、制御シミュレーションを行うシミュレーションシステムにおいて、リアルタイムシミュレータ1のモデル内に伝達関数計測ブロックモデル100を配置して構成される。
【選択図】図2
Description
図5に示すように、OxとOy間の伝達関数を計算する。
(2) Loop=1、Ctrl=1
図6に示すように、CxとCy間の伝達関数を計算する。
(3) Loop=0or1、Ctrl=0
図7に示すように、MxとMy間の伝達関数を計算する。
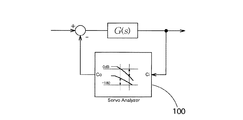
伝達関数計測ブロックモデル100は、図4に設定画面の一例として示すように、パラメトリックに伝達関数計測構造を変更可能に構成され、多種多様な態様で伝達関数の計測を行うことができる。
5 モータ(制御対象)
100 伝達関数計測ブロックモデル
Claims (2)
- 制御器と等価な応答を実時間で演算して出力するモデルベースなリアルタイムシミュレータを備え、該リアルタイムシミュレータを実機からなる制御対象に接続し、制御シミュレーションを行うシミュレーションシステムにおいて、
前記リアルタイムシミュレータのモデル内に伝達関数計測ブロックモデルを配置することを特徴とするサーボ解析機能を備えたシミュレーションシステム。 - 前記伝達関数計測ブロックモデルは、パラメトリックに伝達関数計測構造を変更可能に構成されることを特徴とする請求項1に記載のサーボ解析機能を備えたシミュレーションシステム。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008210945A JP5361280B2 (ja) | 2008-08-19 | 2008-08-19 | サーボ解析機能を備えたシミュレーションシステム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008210945A JP5361280B2 (ja) | 2008-08-19 | 2008-08-19 | サーボ解析機能を備えたシミュレーションシステム |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010051061A true JP2010051061A (ja) | 2010-03-04 |
| JP5361280B2 JP5361280B2 (ja) | 2013-12-04 |
Family
ID=42067676
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008210945A Active JP5361280B2 (ja) | 2008-08-19 | 2008-08-19 | サーボ解析機能を備えたシミュレーションシステム |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5361280B2 (ja) |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102890451A (zh) * | 2012-09-29 | 2013-01-23 | 浙江大学 | 用于车载控制器测试的半实物仿真平台 |
| JP5405685B1 (ja) * | 2013-04-22 | 2014-02-05 | ディエスピーテクノロジ株式会社 | モータ制御装置およびモータ制御方法 |
| EP3220217A1 (en) * | 2016-03-14 | 2017-09-20 | Omron Corporation | Method and device for simulation of a mechanical system |
| EP3220216A1 (en) * | 2016-03-14 | 2017-09-20 | Omron Corporation | Method and device for simulation of a mechanical system |
| JP6316518B1 (ja) * | 2017-02-06 | 2018-04-25 | 三菱電機株式会社 | 仮想検証システムおよび駆動制御器 |
| CN109521755A (zh) * | 2019-01-21 | 2019-03-26 | 苏州华兴源创科技股份有限公司 | 一种仿真系统、旋变测试系统和旋变测试方法 |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN104571086B (zh) * | 2014-12-24 | 2018-06-29 | 上海理工大学 | 基于传递函数的温度控制器仿真测试方法 |
| CN108073087B (zh) * | 2017-10-31 | 2020-08-28 | 北京精密机电控制设备研究所 | 一种多学科综合仿真平台环境下的机电伺服系统控制方法 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0772933A (ja) * | 1993-06-03 | 1995-03-17 | Takeshi Yasui | 位置決め制御方法及びその装置 |
| JP2006149033A (ja) * | 2004-11-17 | 2006-06-08 | Toyota Macs Inc | シミュレーション方法及びシミュレーションプログラム |
| JP2006236035A (ja) * | 2005-02-25 | 2006-09-07 | Ricoh Co Ltd | 駆動制御系設計支援装置、駆動制御系設計支援プログラム、駆動機構設計支援装置、駆動機構設計支援プログラム及び記録媒体 |
-
2008
- 2008-08-19 JP JP2008210945A patent/JP5361280B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH0772933A (ja) * | 1993-06-03 | 1995-03-17 | Takeshi Yasui | 位置決め制御方法及びその装置 |
| JP2006149033A (ja) * | 2004-11-17 | 2006-06-08 | Toyota Macs Inc | シミュレーション方法及びシミュレーションプログラム |
| JP2006236035A (ja) * | 2005-02-25 | 2006-09-07 | Ricoh Co Ltd | 駆動制御系設計支援装置、駆動制御系設計支援プログラム、駆動機構設計支援装置、駆動機構設計支援プログラム及び記録媒体 |
Cited By (17)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN102890451A (zh) * | 2012-09-29 | 2013-01-23 | 浙江大学 | 用于车载控制器测试的半实物仿真平台 |
| CN102890451B (zh) * | 2012-09-29 | 2014-11-05 | 浙江大学 | 用于车载控制器测试的半实物仿真平台 |
| JP5405685B1 (ja) * | 2013-04-22 | 2014-02-05 | ディエスピーテクノロジ株式会社 | モータ制御装置およびモータ制御方法 |
| CN107193219A (zh) * | 2016-03-14 | 2017-09-22 | 欧姆龙株式会社 | 仿真装置、仿真方法、控制程序以及记录介质 |
| US10909278B2 (en) | 2016-03-14 | 2021-02-02 | Omron Corporation | Simulation device, simulation method, control program and recording medium |
| JP2017167591A (ja) * | 2016-03-14 | 2017-09-21 | オムロン株式会社 | シミュレーション装置、シミュレーション方法、制御プログラム、および記録媒体 |
| JP2017167592A (ja) * | 2016-03-14 | 2017-09-21 | オムロン株式会社 | シミュレーション装置、シミュレーション方法、制御プログラム、および記録媒体 |
| CN107193218A (zh) * | 2016-03-14 | 2017-09-22 | 欧姆龙株式会社 | 仿真装置、仿真方法、控制程序以及记录介质 |
| EP3220217A1 (en) * | 2016-03-14 | 2017-09-20 | Omron Corporation | Method and device for simulation of a mechanical system |
| US10909277B2 (en) | 2016-03-14 | 2021-02-02 | Omron Corporation | Simulation device, simulation method, control program and recording medium |
| EP3220216A1 (en) * | 2016-03-14 | 2017-09-20 | Omron Corporation | Method and device for simulation of a mechanical system |
| WO2018142612A1 (ja) * | 2017-02-06 | 2018-08-09 | 三菱電機株式会社 | 仮想検証システムおよび駆動制御器 |
| KR20190061093A (ko) * | 2017-02-06 | 2019-06-04 | 미쓰비시덴키 가부시키가이샤 | 가상 검증 시스템 및 구동 제어기 |
| CN110140292A (zh) * | 2017-02-06 | 2019-08-16 | 三菱电机株式会社 | 虚拟验证系统及驱动控制器 |
| KR102115957B1 (ko) | 2017-02-06 | 2020-05-27 | 미쓰비시덴키 가부시키가이샤 | 가상 검증 시스템 및 구동 제어기 |
| JP6316518B1 (ja) * | 2017-02-06 | 2018-04-25 | 三菱電機株式会社 | 仮想検証システムおよび駆動制御器 |
| CN109521755A (zh) * | 2019-01-21 | 2019-03-26 | 苏州华兴源创科技股份有限公司 | 一种仿真系统、旋变测试系统和旋变测试方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5361280B2 (ja) | 2013-12-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5361280B2 (ja) | サーボ解析機能を備えたシミュレーションシステム | |
| Yu et al. | Fractional order modeling and control for permanent magnet synchronous motor velocity servo system | |
| CN103402855B (zh) | 用于校准电气控制系统的系统 | |
| CN107943121B (zh) | 一种考虑非线性特性的永磁同步电动机模拟器及其控制方法 | |
| JP6212068B2 (ja) | 機械の周波数特性をオンラインで取得する機能を有するサーボ制御装置 | |
| JP4669859B2 (ja) | 模擬レゾルバ、モータシミュレータ、及び、モータシミュレーション方法 | |
| CN104205614B (zh) | 三相交流感应电机的控制装置以及三相交流感应电机的控制方法 | |
| Rodriguez-Resendiz et al. | Adjustable speed drive project for teaching a servo systems course laboratory | |
| CN111857197A (zh) | 三相交流电机及其负载的模拟方法及装置 | |
| CN103607144A (zh) | 无刷直流电动机模拟器 | |
| JP4207810B2 (ja) | Pmモータの評価試験装置 | |
| Lange et al. | Measurement-parameterized synchronous machine model with spatial-harmonics | |
| Babel et al. | Parametric sensitivity in the analysis and control of permanent magnet synchronous machines | |
| Calis et al. | LabVIEW based laboratory typed test setup for the determination of induction motor performance characteristics | |
| Pramod et al. | Position sensing induced parasitic torques in permanent magnet synchronous motor drives | |
| JP6790448B2 (ja) | シミュレーション装置 | |
| CN106227184B (zh) | 直驱风机阻抗硬件在环测试系统及方法 | |
| Özyurt | Parameter and speed estimation on induction motors from manufactures data and measurements | |
| Otava et al. | PMSM stator winding faults modelling and measurement | |
| TWI409486B (zh) | Measurement of motor parameters | |
| EP2112753A1 (en) | Method and device for determining the rotor rotation speed of an asynchronous electric induction motor | |
| Betz et al. | A dynamic dynamometer for testing of mining dc motors | |
| CN112269127A (zh) | 用于三相逆变器、马达和驱动设计的dq0和反dq0变换 | |
| Ruba et al. | Real-time FPGA model in the loop analysis of Permanent Magnet Synchronous Machine for LEV | |
| CN104571237A (zh) | 用于补偿逆变器输出电压中的相位误差的装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110218 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121128 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130108 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130227 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130806 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130903 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5361280 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |