JP2010035618A - 検体採取装置 - Google Patents
検体採取装置 Download PDFInfo
- Publication number
- JP2010035618A JP2010035618A JP2008198666A JP2008198666A JP2010035618A JP 2010035618 A JP2010035618 A JP 2010035618A JP 2008198666 A JP2008198666 A JP 2008198666A JP 2008198666 A JP2008198666 A JP 2008198666A JP 2010035618 A JP2010035618 A JP 2010035618A
- Authority
- JP
- Japan
- Prior art keywords
- sample
- sample collection
- load
- collection device
- unit
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images




Landscapes
- Sampling And Sample Adjustment (AREA)
Abstract
【解決手段】検体採取装置は、検体を採取する検体採取部1を一端に有する検体採取部材2と、検体採取部材2を支持するとともに、検体の採取時に保持の対象となる保持部4と、検体の採取時に、検体の表面に対する押圧に起因して検体採取部1に発生する押圧荷重が略一定の荷重になるように、押圧荷重を制御する荷重制御部3と、を備える。
【選択図】図2
Description
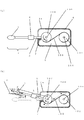
本発明の第1の実施形態における検体採取装置を図1、2に示す。図1は検体採取装置を側面から見た概略図、図2は検体採取装置を側面から見た断面図である。
図2(b)に示すように、検体の採取時には、ユーザが保持部4を保持し、検体採取部1を採取対象の表面10に圧接させる。これにより、図中に示された矢印Bの向きにシャフト部5が動き、シャフト部5がストッパー7から離間して、第2プーリ102にかかっている一定モーメントMがシャフト部5の検体採取部1に働き、検体採取部1には一定の荷重がかかることになる。このとき、第1プーリ101と第2プーリ102と定荷重ばね103は、図中に示された破線の矢印の向きに動くことになる。なお、回転軸100から検体採取部1までの長さをLとすると、第2プーリ102にかかっているモーメントMにより、検体採取部1にかかる荷重は、F(=M/L)となる。
本発明の第2の実施形態における検体採取装置を図3に示す。本実施形態の検体採取装置は、検体採取部1、検体採取部材2、荷重制御部3、保持部4、シャフト部5、連結部6とを有して構成される。なお、第1の実施形態における検体採取装置と同一部分については、説明を省略または簡略化する。
図3(b)に示すように、検体の採取時には、ユーザが保持部4を保持し、検体採取部1を検査対象の表面10に圧接させる。この圧接により、矢印の方向に、ばね定数Kの弾性板200が変位uだけ変位したとする。この場合、弾性板200の他端で発生する荷重(ばね荷重)F0は、Kuと表され、検体採取部1で発生する荷重F(押圧荷重)は、F0とモーメントの釣り合いから求まる値となる。このとき、弾性板200のばね定数Kを十分小さくしておけば、荷重Fの変化は十分小さくすることができ、略定荷重とみなすことができる。なお、略定荷重とは、設定した荷重の±30%程度の範囲の値をしめす。なお、弾性板200にストッパ7で初期変位を与えて初期荷重をかけておくことで、設定した荷重からの変化をより小さくすることができる。
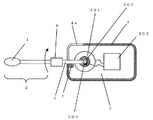
本発明の第3の実施形態における検体採取装置を図4に示す。本実施形態の検体採取装置は、検体採取部1、検体採取部材2、荷重制御部3、保持部4、シャフト部5、連結部6とを有して構成される。なお、第1の実施形態における検体採取装置と同一部分については、説明を省略または簡略化する。
図4に示すように、検体の採取時には、ユーザが保持部4を保持し、検体採取部1を検査対象の表面10に圧接させる。荷重制御部3は、シャフト5に伝わった荷重を力検出器302で検出し、その検出信号から制御部303で設定した荷重になるように制御部303がモータ301を制御する。
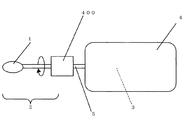
本発明の第4の実施形態の検体採取装置を図5に示す。本実施形態の検体採取装置は、検体採取部1、検体採取部材2、荷重制御部3、保持部4、シャフト部5、シャフト部5と検体採取部材2とをつなぐ回転部400とを有して構成される。なお、第1の実施形態における検体採取装置と同一部分については、説明を省略または簡略化する。
本実施形態では、検体の採取時には、ユーザが保持部4を保持し、検体採取装置が、回転部400の回転機構により、検体採取部1を定荷重で圧接させた状態で回転させて検体を採取する。これにより、検体採取装置が検体採取部1を圧接させる動作をとることのみで容易に採取することができる。
本発明の第5の実施形態における検体採取装置を図6に示す。本実施形態の検体採取装置は、検体採取部1、検体採取部材2、荷重制御部3、保持部4、シャフト部5、連結部6とを有して構成される。なお、第1の実施形態における検体採取装置と同一部分については、説明を省略または簡略化する。
本実施形態では、検体の採取時には、ユーザが保持部4を保持し、検体採取部1を検査対象の表面10に圧接させる。検査者(ユーザ)が保持部4を手で保持する場合に、図6(b)に示すように、手首の角度θ1が0度から90度の範囲にあれば、検体採取装置による採取動作を行う上で自然な角度にあるといえる。
この比較例では、図7を用い、従来の検体採取部を保持部に固定した検体採取部で検体から採取した場合と、第1の実施形態で説明した検体採取装置を使用し、押圧荷重を定荷重として検体から採取した場合とにおいて、採取された検体としての菌の濃度を測定した結果について説明する。
2 検体採取部材
3 荷重制御部
4 保持部
4a 開口部
5 シャフト部
6 連結部
7 ストッパ
10 検査対象の表面
20 検査者の手
100 回転軸
101 第1プーリ
102 第2プーリ
103 定荷重ばね
200 弾性板
300 回転軸
301 モータ
302 力検出部
303 制御部
400 回転部
Claims (8)
- 検体を採取する検体採取部を一端に有する検体採取部材と、
当該検体採取部材を支持するとともに、前記検体の採取時に保持の対象となる保持部と、
前記検体の採取時に、前記検体の表面に対する押圧に起因して前記検体採取部に発生する押圧荷重が略一定の荷重になるように、当該押圧荷重を制御する荷重制御部と、
を備える検体採取装置。 - 請求項1の検体採取装置であって、
前記検体採取部材は、着脱可能である
検体採取装置。 - 請求項1または2に記載の検体採取装置であって、
前記荷重制御部は、二つのプーリおよび当該二つのプーリ間を接続する定荷重ばねを有する
検体採取装置。 - 請求項1または2に記載の検体採取装置であって、
前記荷重制御部は、弾性板を備え、前記弾性板のばね定数および前記弾性板の変位に基づくばね荷重に基づいて、前記押圧荷重を制御する
検体採取装置。 - 請求項1または2に記載の検体採取装置であって、
前記荷重制御部は、
前記押圧荷重を制御するモータと、
前記押圧荷重を検出する押圧荷重検出部と、
前記押圧荷重検出部による検出結果に基づいて、前記モータを制御するモータ制御部と
を備える検体採取装置。 - 請求項1または2に記載の検体採取装置であって、
前記検体採取部材は、前記押圧荷重が作用する方向により定義される面内で、回動する
検体採取装置。 - 請求項1または2に記載の検体採取装置であって、
前記検体採取部材は、前記押圧荷重が作用する方向により定義される面における前記押圧荷重が作用する方向と垂直な方向を軸として、回転する
検体採取装置。 - 請求項1または2に記載の検体採取装置であって、
前記検体採取部材は、前記押圧荷重が作用する方向により定義される面内で、前記保持部に対して所定の角度をもって配置された
検体採取装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008198666A JP5274143B2 (ja) | 2008-07-31 | 2008-07-31 | 検体採取装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008198666A JP5274143B2 (ja) | 2008-07-31 | 2008-07-31 | 検体採取装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010035618A true JP2010035618A (ja) | 2010-02-18 |
| JP5274143B2 JP5274143B2 (ja) | 2013-08-28 |
Family
ID=42008784
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008198666A Active JP5274143B2 (ja) | 2008-07-31 | 2008-07-31 | 検体採取装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5274143B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111297405A (zh) * | 2020-03-23 | 2020-06-19 | 广州医科大学附属第一医院 | 一种可提示压力范围的手持式采样夹持装置 |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20250153493A (ko) | 2024-04-18 | 2025-10-27 | 한국기계연구원 | 직렬 탄성 구동기 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003334059A (ja) * | 2002-05-16 | 2003-11-25 | Kao Corp | 微生物採取装置及び微生物採取方法 |
| JP2009079968A (ja) * | 2007-09-26 | 2009-04-16 | Panasonic Corp | 試料採取方法及びそれを用いた試料採取装置 |
-
2008
- 2008-07-31 JP JP2008198666A patent/JP5274143B2/ja active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2003334059A (ja) * | 2002-05-16 | 2003-11-25 | Kao Corp | 微生物採取装置及び微生物採取方法 |
| JP2009079968A (ja) * | 2007-09-26 | 2009-04-16 | Panasonic Corp | 試料採取方法及びそれを用いた試料採取装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111297405A (zh) * | 2020-03-23 | 2020-06-19 | 广州医科大学附属第一医院 | 一种可提示压力范围的手持式采样夹持装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5274143B2 (ja) | 2013-08-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4632962B2 (ja) | 同軸度・直角度測定装置及びその方法 | |
| Tholey et al. | Design, development, and testing of an automated laparoscopic grasper with 3-D force measurement capability | |
| RU188751U1 (ru) | Устройство для определения трибологических характеристик материалов | |
| US8079273B2 (en) | Power detecting device | |
| JP2017512299A (ja) | ロボット外科手術システムのための入力デバイスアセンブリ | |
| JP5274143B2 (ja) | 検体採取装置 | |
| JP2011117920A (ja) | 弾力計測装置 | |
| RU2381481C1 (ru) | Машина для испытания материалов на трение и износ | |
| CN103616105B (zh) | 可检测传动力并进行传动的装置 | |
| CN211668621U (zh) | 一种钢筋重量偏差测量装置 | |
| CN104237073A (zh) | 具有应变装置的双电动机流变仪 | |
| WO2022154113A1 (ja) | 力学的測定装置 | |
| CN106596310A (zh) | 一种用于分析对偶材料摩擦性能的测试系统 | |
| GB2479971A (en) | Measuring device for external diameters | |
| RU104313U1 (ru) | Устройство для измерения сил трения между колесом и рельсом | |
| CN207095756U (zh) | 数显张力计 | |
| JP2006250557A5 (ja) | ||
| RU86299U1 (ru) | Устройство для измерения момента трения | |
| CN202041511U (zh) | 用于超声波探伤斜探头的使用力度检测装置 | |
| JP2013096892A (ja) | 簡易型振子式摩擦係数測定器 | |
| RU2695042C1 (ru) | Машина для испытания на трение и изнашивание | |
| JP2006071557A (ja) | 摩擦試験方法および装置 | |
| CN209377595U (zh) | 一种关节测力计 | |
| CN209751023U (zh) | 诊脉装置及诊脉调位机构 | |
| JP2009293965A (ja) | トラクション計測用試験装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110610 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130416 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130514 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5274143 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |