JP2010016119A - 電子部品実装方法 - Google Patents
電子部品実装方法 Download PDFInfo
- Publication number
- JP2010016119A JP2010016119A JP2008173688A JP2008173688A JP2010016119A JP 2010016119 A JP2010016119 A JP 2010016119A JP 2008173688 A JP2008173688 A JP 2008173688A JP 2008173688 A JP2008173688 A JP 2008173688A JP 2010016119 A JP2010016119 A JP 2010016119A
- Authority
- JP
- Japan
- Prior art keywords
- axis
- drive mechanism
- motor
- offset
- axis drive
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images






Landscapes
- Supply And Installment Of Electrical Components (AREA)
Abstract
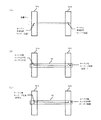
【解決手段】搭載ヘッド10をX軸に沿って移動させるX軸駆動機構12と、該搭載ヘッドをX軸駆動機構12と一体で、対向配置された第1Y軸駆動機構14a、第2Y軸駆動機構14bにそれぞれ設置されている第1モータ16a、第2モータ16bを同時駆動し、各軸毎に設定されている基準位置を基準に移動させるY軸駆動機構を備えた実装装置を使用し、前記搭載ヘッドにより保持した電子部品を基板上に搭載する電子部品実装方法において、前記第1モータ、第2モータを同時駆動する際に設定するオフセットを、予め両モータを駆動してX軸駆動機構および搭載ヘッド10をY方向に移動させた際にA〜Eの各位置で取得された負荷率に基づいて設定する。
【選択図】図1
Description
…(1)
12…X軸駆動機構
14a…第1Y軸駆動機構
14b…第2Y軸駆動機構
16a…第1モータ
16b…第2モータ
Claims (3)
- 搭載ヘッドをX軸に沿って移動させるX軸駆動機構と、該搭載ヘッドをX軸駆動機構と一体で、対向配置された第1Y軸、第2Y軸に沿って各軸にそれぞれ設置されている第1モータ、第2モータを同時駆動し、各軸毎に設定されている基準位置を基準に移動させるY軸駆動機構を備えた実装装置を使用し、前記搭載ヘッドにより保持した電子部品を基板上に搭載する電子部品実装方法において、
前記第1モータ、第2モータを同時駆動する際に設定するオフセットを、予め両モータを駆動してX軸駆動機構をY軸方向に移動させた際の負荷率に基づいて設定することを特徴とする電子部品実装方法。 - 最初に仮オフセットを設定し、X軸駆動機構をY軸方向に移動させた際にY軸上の複数位置で負荷率を取得し、取得された負荷率がY軸駆動機構全体で最小となるように前記仮オフセットを微調整して、前記オフセットを設定することを特徴とする請求項1に記載の電子部品実装方法。
- 前記負荷率が、モータ駆動時の電流検出値、軸の歪量及び軸の偏差量の少なくとも1つであることを特徴とする請求項1に記載の電子部品実装方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008173688A JP5241346B2 (ja) | 2008-07-02 | 2008-07-02 | 電子部品実装方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008173688A JP5241346B2 (ja) | 2008-07-02 | 2008-07-02 | 電子部品実装方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010016119A true JP2010016119A (ja) | 2010-01-21 |
| JP5241346B2 JP5241346B2 (ja) | 2013-07-17 |
Family
ID=41701969
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008173688A Expired - Fee Related JP5241346B2 (ja) | 2008-07-02 | 2008-07-02 | 電子部品実装方法 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5241346B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012114325A (ja) * | 2010-11-26 | 2012-06-14 | Panasonic Corp | 部品実装装置および部品実装装置におけるモータ制御方法 |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006313839A (ja) * | 2005-05-09 | 2006-11-16 | Juki Corp | 部品実装装置 |
-
2008
- 2008-07-02 JP JP2008173688A patent/JP5241346B2/ja not_active Expired - Fee Related
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006313839A (ja) * | 2005-05-09 | 2006-11-16 | Juki Corp | 部品実装装置 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2012114325A (ja) * | 2010-11-26 | 2012-06-14 | Panasonic Corp | 部品実装装置および部品実装装置におけるモータ制御方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5241346B2 (ja) | 2013-07-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9152142B2 (en) | Servo controller for correcting position error when moving member reverses | |
| US7788820B2 (en) | Method and device for contacting a surface point on a workpiece | |
| KR102086357B1 (ko) | 복수에 절대 엔코더 값과 감속비를 이용한 절대 위치 판단 및 위치 판단에 요구되는 엔코더 분해능 | |
| EP2299237A2 (en) | Gantry stage orthogonality error measurement method and error compensation method | |
| US10081151B2 (en) | Servo press and control method | |
| US20230040955A1 (en) | Transfer apparatus and transfer method | |
| KR101050164B1 (ko) | 리니어 모터 및 그 제어방법 | |
| JP5241346B2 (ja) | 電子部品実装方法 | |
| JP2008241338A (ja) | 位置検出装置 | |
| US9151589B2 (en) | Surface texture measurement device, controller for surface texture measurement device, and method for controlling the same | |
| JP2008148412A (ja) | モータ制御装置 | |
| CN212300247U (zh) | 光栅尺动态误差的检测系统 | |
| KR101226807B1 (ko) | 시편이송 스테이지 장치 및 그 구동방법 | |
| KR101448510B1 (ko) | 스테이지의 직각도 측정 시스템 및 이를 이용한 스테이지의 홈 포지셔닝 방법 | |
| JP2010148070A (ja) | 画像読取装置及びその制御方法 | |
| JP2008041011A (ja) | 工作機械における位置補正方法 | |
| CN108983701A (zh) | 同步驱动装置及驱动方法 | |
| CN114995296A (zh) | 一种多轴样品台闭环控制方法、存储介质及系统 | |
| JP2006313839A (ja) | 部品実装装置 | |
| JP2006192558A (ja) | テーブル装置及びその制御方法 | |
| KR102927547B1 (ko) | 듀얼 엔코더를 구비한 볼스크류 액츄에이터 시스템 및 그 동작 방법 | |
| JP2011036065A (ja) | モータ制御方法およびモータ制御装置 | |
| KR100529904B1 (ko) | 정밀 스테이지의 원점 설정방법 | |
| KR20070103610A (ko) | 엔코더를 구비하는 리니어 가이드 및 리니어 모터 | |
| JP5064725B2 (ja) | 形状測定方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110629 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120925 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120928 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121122 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130115 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130213 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130312 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130402 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160412 Year of fee payment: 3 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 Ref document number: 5241346 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| LAPS | Cancellation because of no payment of annual fees |