JP2010002409A - カンチレバー装置及びカンチレバー制御方法 - Google Patents
カンチレバー装置及びカンチレバー制御方法 Download PDFInfo
- Publication number
- JP2010002409A JP2010002409A JP2008299838A JP2008299838A JP2010002409A JP 2010002409 A JP2010002409 A JP 2010002409A JP 2008299838 A JP2008299838 A JP 2008299838A JP 2008299838 A JP2008299838 A JP 2008299838A JP 2010002409 A JP2010002409 A JP 2010002409A
- Authority
- JP
- Japan
- Prior art keywords
- cantilever
- feedback
- deflection angle
- self
- vibration source
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images













Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01Q—SCANNING-PROBE TECHNIQUES OR APPARATUS; APPLICATIONS OF SCANNING-PROBE TECHNIQUES, e.g. SCANNING PROBE MICROSCOPY [SPM]
- G01Q10/00—Scanning or positioning arrangements, i.e. arrangements for actively controlling the movement or position of the probe
- G01Q10/04—Fine scanning or positioning
- G01Q10/06—Circuits or algorithms therefor
- G01Q10/065—Feedback mechanisms, i.e. wherein the signal for driving the probe is modified by a signal coming from the probe itself
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10—TECHNICAL SUBJECTS COVERED BY FORMER USPC
- Y10S—TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y10S977/00—Nanotechnology
- Y10S977/84—Manufacture, treatment, or detection of nanostructure
- Y10S977/849—Manufacture, treatment, or detection of nanostructure with scanning probe
- Y10S977/86—Scanning probe structure
- Y10S977/863—Atomic force probe
Landscapes
- Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- General Health & Medical Sciences (AREA)
- General Physics & Mathematics (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Length Measuring Devices With Unspecified Measuring Means (AREA)
Abstract
【解決手段】自励発振回路40は、たわみ角計測機構により検出したカンチレバーのたわみ角信号を積分器42により積分し、その積分値にゲイン発生器44により発生した線形フィードバックゲインKlinを乗算することにより、それに対応する出力を生成すると共に、たわみ角信号をアナログ乗算器46及びアナログ乗算器48により3乗し、積分器50及び積分器52により積分し、その積分値にゲイン発生器54により発生した非線形フィードバックゲインKnonを乗算することにより、それに対応する出力を生成し、これらの出力を加算器56により加算し、ピエゾ素子に対する電圧信号VCを生成する。
【選択図】図7
Description
すなわち、ファンデルポール型自励振動には、その非線形性によって有限振幅を持った定常振動状態が存在することが知られている。この振幅特性を利用すれば、カンチレバーの共振状態での振幅制御が可能となり、測定試料への接触の問題点を解決できる。

さらに本発明の請求項2に係るカンチレバー装置は、請求項1記載のカンチレバー装置において、前記制御部によって生成されるフィードバック制御信号VCが、下記式(10)により表されることを特徴とする。
さらに本発明の請求項8に係るカンチレバー制御方法は、請求項7記載のカンチレバー制御方法において、前記制御部は、下記式(16)により求められるフィードバック制御信号VCに基づいて前記振動源を制御することを特徴とする。
(カンチレバー解析モデル)
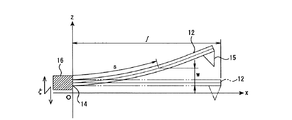
図1には、本発明の実施形態に係るAFMカンチレバーの解析モデルが示されている。このAFMカンチレバー(以下、単に「カンチレバー」という。)12をオイラーベルヌーイ梁と見做し運動方程式を導出する。カンチレバー12の長手方向に沿ってx軸、たわみ方向に沿ってz軸をとる。カンチレバー12は、z−x平面内を運動するものとする。カンチレバー12は長さがlであり、固定端14から中立面のある任意の点pまでの距離をs、このp点のx軸方向に沿った変位をu、z軸方向に沿った変位をwとする。カンチレバー12の固定端14は、圧電アクチュエータであるピエゾ素子16に連結されており、ピエゾ素子16は、固定端14にz軸方向に沿った変位入力ζを与えることができ、この変位入力ζがカンチレバー12に対する制御入力となる。また、カンチレバー12には、先端部の下面側に探針15が配置されている。
(モデルの理論解析)
まず、カンチレバーの運動エネルギTとポテンシャルエネルギVは、式(17)及び式(18)によりそれぞれ表される。
なお、圧電定数d33については、例えば「C.R.Fuller, S.E1liot, and P.Nelson, Active Control of Vibration,(1996),pp.115‐120,Academic Press, London.」に記載されている。
式(27)の無次元運動方程式を、多重尺度法を用いて解析する。微小パラメータε(0<ε≪1)を用いて、z軸方向に沿った変位wを、べき級数展開し、多重時間尺度を式(32)及び式(33)のように導入する。
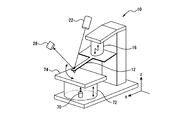
図3には、本実施形態に係るAFM装置の構成が模式的に示され、図4には、図3に示されるAFM装置に用いられた光てこ法を用いたたわみ角計測機構の構成が示されている。
フォトディテクタ28は、図4(B)に示されるように、4個の受光領域28A〜28Dを有する分割構造を有しており、上側の受光領域28A及び28Bにおける受光光量と下側の受光領域28C及び28Dにおける受光光量との差(光量比)により入射角の変化を検出する。また、図3にて、70は微小変位計、72はチューブスキャナ、74はサンプルステージである。
またAFM装置10では、カンチレバー12の振動源として接触型ならばピエゾ素子16を用いていたが、このような振動源以外にも、例えば、非接触型ならば電磁力を用いたボイスコイル型の振動源や、静電気力を用いた静電アクチュエータをカンチレバー12の振動源として用いても良い。
図6のブロック図に示されるように、AFM装置10は、制御部であるコントローラ70を備えている。コントローラ70は、たわみ角計測機構20により検出したカンチレバー12のたわみ角信号に基づいて、フィードバック制御信号である電圧信号を生成し、この電圧信号を制御電圧VCとして振動源であるピエゾ素子16に出力する。これにより、ピエゾ素子16は、制御電圧VCに対応する振動変位をカンチレバー12に伝達して、カンチレバー12を自励振動させる。
ファンデルポール型自励発振回路(以下、単に「自励発振回路」という。)40は、式(25)により表されたカンチレバー12のたわみ角に比例する線形フィードバック及び、たわみ角の3乗に比例するよう非線形フィードバックを実現するためのアナログ制御回路である。
なお、本実施形態では、自励発振回路40をコントローラ70によりアナログ制御回路として実現したが、このような自励発振回路をコントローラ74によりディジタル制御回路として実現することも可能である。
ここで、A/D変換器74は、たわみ角計測機構20から出力されたカンチレバー12のたわみ角のアナログ信号をディジタル信号に変換し、コントローラ74へ出力する。またD/A変換器76は、コントローラ70から出力されたディジタルの電圧信号Voutをアナログ電圧信号である制御電圧VCに変換し、ピエゾ素子16に出力する。
AFM装置10では、上記のようにコントローラ74により自励発振回路をディジタル制御回路として構成し、この自励発振回路、A/D変換器74及びD/A変換器76により制御電圧VCを生成した場合でも、当然、アナログの自励発振回路40により制御電圧VCを生成した場合と基本的に同一の制御結果が得られる。
次に、本実施形態に係るAFM装置10(図3参照)を用いて自励発振の実験を行った結果について説明する。
AFM装置10には、カンチレバー12として長さ450μm、幅50μm、厚さ4μm、1次モードの固有振動数23〜31kHz(セイコーインスツル製、SI-DF3)のものを取り付けた。
(a)カンチレバーの振幅測定法
本実験では、AFM装置で一般的に利用される1次モードの固有振動数において自励発振を実現することを考える。カンチレバー12に線形フィードバックの制御成分のみを加えると、カンチレバー12は自励発振した。このとき、カンチレバー12の振幅の測定には光てこ方式のたわみ角計測機構20を用いた。レーザBをカンチレバー12の先端付近に照射し、その出力信号を測定した。たわみ角計測機構20からの出力信号をFFT(高速フーリエ変換)解析することにより、そのカンチレバー12の先端付近での振幅と振動数を測定した。
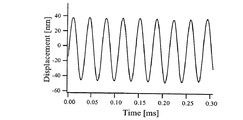
図9には、線形フィードバックゲインに対応する制御入力電圧のみをピエゾ素子に加えた場合の時刻歴波形が示されている。また図10には、線形フィードバックゲイン及び非線形フィードバックゲインに対応する制御入力電圧をピエゾ素子に加えた場合の時刻歴波形が示されている。
図11、図12及び図13には、自励発振の定常振幅の大きさと線形フィードバックゲインとの関係が示されている。これらの図にて、横軸は線形フィードバックゲインKlin、縦軸は自励発振の定常振幅astである.また、黒丸「●」は線形フィードバックゲインを増加させているときのプロットであり、白丸「○」は線形フィードバックゲインを減少させているときのプロットである。線形フィードバックのみの場合は、図11に示されるように、臨界ゲインKlin-crを超えるとすぐに発散してしまうのに対し、線形フィードバック及び非線形フィードバックの場合は、図12に示されるように、非線形フィードバックゲインの効果によって振幅が制御されている様子がわかる。
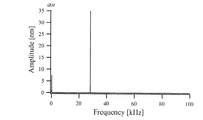
また、図12中で最大振幅をとる線形フィードバックゲインKlin=1.79×106[V/s]のときの光てこ出力及び、周波数スペクトルをそれぞれ図14及び図15に示す。これらからは、28kHz付近での定常振幅を持った自励発振を確認できる。
図16には、自励発振振動数Ωと線形フィードバックゲインKlinとの関係が示されている。この図16からは、線形フィードバックゲインKlinが増加する、すなわち応答振幅astが増加するとともにΩが低下している様子がわかる。このことは、理論解析で示した自励発振振動数Ωを表す式(52)から得られる考察と一致する。
(a)カンチレバーホルダの構成
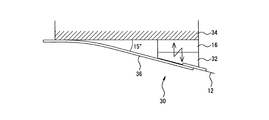
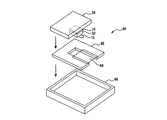
図17及び図18には、本実施形態に係る制御方法を用いて生体試料の液中観察を行うために液中観察用のカンチレバーホルダの構成が示されている。カンチレバーホルダ60では、液体Fの環境を一定に保つためにシャーレ66に入っている液体Fをステンレスの蓋62で覆ってある。蓋62はカンチレバーホルダ30に固定されている。またたわみ角測機構20でカンチレバー12のたわみ角を測定するため、レーザBの光路にあたる部分はステンレスでなくガラスカバー64を用いている。このカンチレバーホルダ60により、既存の試AFM装置のカンチレバーホルダと交換するだけで液体F中での試料観察が可能になる。さらに、AFM装置10では、ピエゾ素子16を液体Fから守るためピエゾ素子16の表面をシリコーンで覆って耐水性を持たせた。
シャーレ66に液体F(本実施形態では、蒸留水を用いた。)を入れ、線形フィードバックのみで自励発振しているカンチレバー12を着水させると、発振が停止した。その後さらに線形フィードバックゲインを増加させるとカンチレバー12は再び発振を始めた。そのときのたわみ角計測機構20からの出力をFFT解析した結果を図19に示す。図19からは、180kHz付近で自励発振している様子がわかる。本実施形態では、大気中での自励発振で支配的であった1次の固有振動数(約29kHz)での発振は見られなかった。
(a)制御演算式の一般化
以上説明した本実施形態に係るAFM装置10では、式(25)に示されるように、コントローラ70、72がカンチレバー12のたわみ角の時間tに関する積分に比例する線形フィードバックに、カンチレバー12のたわみ角の3乗の時間tに関する積分に比例するよう非線形フィードバックを加算し、制御電圧VCを生成している。これにより、AFM装置10では、自励振動するカンチレバー12がいわゆるファンデルポール型の振動子となるように制御している。
この結果、適切なフィードバックゲインKlin及びKnonの値をより一層容易に選定でき、かつコントローラ70、72における入力信号に対する乗算回数も最小にできるので、制御電圧VCを生成する回路も簡単なものにできる。
また、本実施形態に係るAFM装置10では、たわみ角計測機構20によりカンチレバー12のたわみ角を検出し、このたわみ角計測機構20により出力されたカンチレバー12のたわみ角信号に基づいて自励発振回路40が制御電圧VCを生成していたが、たわみ角計測機構20に代わるたわみ量計測機構又は変位計測機構については、例えば、レーザードップラー式振動計やピエゾ素子を用い、カンチレバー12のたわみ量又は変位を測定するものを用いても良い。
コントローラ70、72は、たわみ量計測機構又は変位計測機構によりカンチレバー12のたわみ量又は変位を測定する場合には、式(59)に従って制御電圧VCを生成する。
12 カンチレバー
14 固定端
16 ピエゾ素子
20 たわみ角計測機構
22 レーザダイオード
24 プリズム
26 折返しミラー
28 フォトディテクタ
28A、28B、28C、28D 受光領域
30 カンチレバーホルダ
32 支持台
34 フレーム部材
40 自励発振回路
42 積分器
44 ゲイン発生器
46 アナログ乗算器
48 アナログ乗算器
50 積分器
52 積分器
54 ゲイン発生器
56 加算器
60 カンチレバーホルダ
62 蓋
64 ガラスカバー
66 シャーレ
70,72 コントローラ
74 A/D(アナログ/ディジタル)変換器
76 D/A(ディジタル/アナログ)変換器
80 線形ゲインアンプ
82、84 乗算器
86 積分器
88 非線形ゲインアンプ
90 加算器
ast 応答振幅
B レーザ
Clin 線形粘性減衰項
d33 圧電定数
F 液体
Klin 線形フィードバックゲイン
Knon 非線形フィードバックゲイン
VC フィードバック制御信号(制御電圧)
λ ラグランジュの未定常数
ω 固有振幅数
Ω 自励発振振動数
Claims (8)
- 測定対象物の表面形状を測定する原子間力顕微鏡に用いられるカンチレバー装置であって、
先端部に探針が設けられ振動可能とされたカンチレバーと、
前記カンチレバーを自励振動させる振動源と、
前記カンチレバーのたわみ角を検出する検出機構と、
前記カンチレバーのたわみ角に基づいて前記振動源をフィードバック制御する制御部と、を備え、
前記制御部によって生成されるフィードバック制御信号VCが、下記式(1)により表されることを特徴とするカンチレバー装置。
- 前記制御部によって生成されるフィードバック制御信号VCが、下記式(2)により表されることを特徴とする請求項1記載のカンチレバー装置。
- 測定対象物の表面形状を測定する原子間力顕微鏡に用いられるカンチレバー装置であって、
先端部に探針が設けられ振動可能とされたカンチレバーと、
前記カンチレバーを自励振動させる振動源と、
前記カンチレバーのたわみ量又は変位を検出する検出機構と、
前記カンチレバーのたわみ量又は変位に基づいて前記振動源をフィードバック制御する制御部と、を備え、
前記制御部によって生成されるフィードバック制御信号VCが、下記式(3)により表されることを特徴とするカンチレバー装置。
- 前記制御部によって生成されるフィードバック制御信号VCが、下記式(4)により表されることを特徴とする請求項3記載のカンチレバー装置。
- 測定対象物の表面形状を測定する原子間力顕微鏡に用いられ、先端部に探針が設けられ振動可能とされたカンチレバー、前記カンチレバーを自励振動させる振動源、前記カンチレバーのたわみ角を検出する検出機構及び、前記カンチレバーのたわみ角に基づいて前記振動源をフィードバック制御する制御部を備えるカンチレバー装置に用いられるカンチレバー制御方法であって、
前記制御部は、下記式(5)により求められるフィードバック制御信号VCに基づいて前記振動源を制御することを特徴とするカンチレバー制御方法。
- 前記制御部は、下記式(6)により求められるフィードバック制御信号VCに基づいて前記振動源を制御することを特徴とする請求項5記載のカンチレバー制御方法。
- 測定対象物の表面形状を測定する原子間力顕微鏡に用いられ、先端部に探針が設けられ振動可能とされたカンチレバー、前記カンチレバーを自励振動させる振動源、前記カンチレバーのたわみ量又は変位を検出する検出機構及び前記カンチレバーのたわみ量又は変位に基づいて前記振動源をフィードバック制御する制御部を備えるカンチレバー装置に用いられるカンチレバー制御方法であって、
前記制御部は、下記式(7)により求められるフィードバック制御信号VCに基づいて前記振動源を制御することを特徴とするカンチレバー制御方法。
- 前記制御部は、下記式(8)により求められるフィードバック制御信号VCに基づいて前記振動源を制御することを特徴とする請求項7記載のファンデルポール型カンチレバー制御方法。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008299838A JP5146964B2 (ja) | 2008-05-23 | 2008-11-25 | カンチレバー装置及びカンチレバー制御方法 |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008135738 | 2008-05-23 | ||
| JP2008135738 | 2008-05-23 | ||
| JP2008299838A JP5146964B2 (ja) | 2008-05-23 | 2008-11-25 | カンチレバー装置及びカンチレバー制御方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010002409A true JP2010002409A (ja) | 2010-01-07 |
| JP5146964B2 JP5146964B2 (ja) | 2013-02-20 |
Family
ID=41343090
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008299838A Expired - Fee Related JP5146964B2 (ja) | 2008-05-23 | 2008-11-25 | カンチレバー装置及びカンチレバー制御方法 |
Country Status (2)
| Country | Link |
|---|---|
| US (1) | US7886366B2 (ja) |
| JP (1) | JP5146964B2 (ja) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011086879A1 (ja) * | 2010-01-18 | 2011-07-21 | 独立行政法人産業技術総合研究所 | 粘度の測定方法および粘度測定装置 |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20100257643A1 (en) * | 2009-02-19 | 2010-10-07 | University Of Louisville Research Foundation, Inc. | Ultrasoft atomic force microscopy device and method |
| US20110060562A1 (en) * | 2009-09-08 | 2011-03-10 | Bekir Sami Yilbas | Method of determining the elastic modulus of coatings |
| CN105007042B (zh) * | 2015-05-20 | 2018-07-24 | 天津大学 | 一种九阶广义Van der Pol振子非线性电路 |
| CN109916366B (zh) * | 2019-03-25 | 2021-04-20 | 西安电子科技大学 | 一种实时监测管道形变与姿态的系统及方法 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3817589B2 (ja) * | 2005-01-26 | 2006-09-06 | 独立行政法人産業技術総合研究所 | カンチレバー制御装置 |
-
2008
- 2008-11-20 US US12/274,511 patent/US7886366B2/en not_active Expired - Fee Related
- 2008-11-25 JP JP2008299838A patent/JP5146964B2/ja not_active Expired - Fee Related
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2011086879A1 (ja) * | 2010-01-18 | 2011-07-21 | 独立行政法人産業技術総合研究所 | 粘度の測定方法および粘度測定装置 |
| US8893544B2 (en) | 2010-01-18 | 2014-11-25 | National Institute Of Advanced Industrial Science And Technology | Viscosity measuring device and viscosity measuring method |
| JP5674159B2 (ja) * | 2010-01-18 | 2015-02-25 | 独立行政法人産業技術総合研究所 | 粘度の測定方法および粘度測定装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US7886366B2 (en) | 2011-02-08 |
| US20090293161A1 (en) | 2009-11-26 |
| JP5146964B2 (ja) | 2013-02-20 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Miller et al. | Effective quality factor tuning mechanisms in micromechanical resonators | |
| JP6138250B2 (ja) | マイクロ電気機械システムおよびマイクロ電気機械システムの使用 | |
| Kiracofe et al. | On eigenmodes, stiffness, and sensitivity of atomic force microscope cantilevers in air versus liquids | |
| Marques et al. | Modelling the electrostatic actuation of MEMS: state of the art 2005 | |
| JP5146964B2 (ja) | カンチレバー装置及びカンチレバー制御方法 | |
| Pallay et al. | A parametric electrostatic resonator using repulsive force | |
| Mahmoodi et al. | Subharmonics analysis of nonlinear flexural vibrations of piezoelectrically actuated microcantilevers | |
| Algre et al. | MEMS ring resonators for laserless AFM with sub-nanoNewton force resolution | |
| Keyvani et al. | Minimizing tip-sample forces and enhancing sensitivity in atomic force microscopy with dynamically compliant cantilevers | |
| JP5118586B2 (ja) | タッピングモードにおける衝撃力を低減化した原子間力顕微鏡の操作方法 | |
| JPWO2006129561A1 (ja) | 走査型プローブ顕微鏡およびカンチレバー駆動装置 | |
| Gurjar et al. | Toward ultrasmall mass detection using adaptive self-sensing piezoelectrically driven microcantilevers | |
| Napoli et al. | A capacitive microcantilever: Modelling, validation, and estimation using current measurements | |
| Fantner et al. | DMCMN: In depth characterization and control of AFM cantilevers with integrated sensing and actuation | |
| Gubbi et al. | Bio-inspired acoustic MEMS sensor with tunable resonance frequency | |
| Kilpatrick et al. | Frequency modulation atomic force microscopy in ambient environments utilizing robust feedback tuning | |
| Moore et al. | AFM cantilever design for multimode Q control: arbitrary placement of higher order modes | |
| Pruchnik et al. | Study of the efficiency of microcantilevers: cases of electrothermal and electromagnetic actuation | |
| Kuter-Arnebeck et al. | Estimating damping in microresonators by measuring thermomechanical noise using laser Doppler vibrometry | |
| JP3817589B2 (ja) | カンチレバー制御装置 | |
| JP2008241619A (ja) | カンチレバー、バイオセンサ、及びプローブ顕微鏡 | |
| Bücken et al. | Time-Domain Analysis of a Novel Co-Resonant Cantilever MEMS Sensor and Derivation of a New Measurement Concept Based on Beating | |
| Brunetto et al. | A small scale viscometer based on an IPMC actuator and an IPMC sensor | |
| Gotszalk et al. | Parallel SPM cantilever arrays for large area surface metrology and lithography | |
| Leahy et al. | Doubling the quality factor of cantilevers in liquid through fluid coupling-based actuation |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20111124 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111124 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121018 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121030 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20121120 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20151207 Year of fee payment: 3 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| LAPS | Cancellation because of no payment of annual fees |