JP2010000142A - Ultrasonic volume data processor - Google Patents
Ultrasonic volume data processor Download PDFInfo
- Publication number
- JP2010000142A JP2010000142A JP2008159536A JP2008159536A JP2010000142A JP 2010000142 A JP2010000142 A JP 2010000142A JP 2008159536 A JP2008159536 A JP 2008159536A JP 2008159536 A JP2008159536 A JP 2008159536A JP 2010000142 A JP2010000142 A JP 2010000142A
- Authority
- JP
- Japan
- Prior art keywords
- volume data
- data
- interpolation
- local
- coordinate system
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images





Landscapes
- Ultra Sonic Daignosis Equipment (AREA)
Abstract
Description
本発明は超音波ボリュームデータ処理装置に関し、特に三次元画像処理技術に関する。 The present invention relates to an ultrasonic volume data processing apparatus, and more particularly to a three-dimensional image processing technique.
本発明は、平成17年度厚生労働科学研究費補助金による研究成果である(研究課題名:ハイリスク胎児の子宮内手術におけるナノインテリジェント技術デバイスの開発研究)。 The present invention is the result of a research funded by the 2005 Health and Labor Sciences Research Grant (Research title: Development research on nano-intelligent technology devices in intrauterine surgery of high-risk fetuses).
近時、医療の分野において、三次元超音波診断が普及しつつある。三次元超音波診断では、生体内の三次元空間に対して超音波が送受波され、これにより得られたボリュームデータに基づいて三次元超音波画像が形成される。ボリュームデータを取得するために従来から幾つかの方法が提案されている。 Recently, three-dimensional ultrasonic diagnosis is becoming popular in the medical field. In the three-dimensional ultrasonic diagnosis, ultrasonic waves are transmitted / received to / from a three-dimensional space in a living body, and a three-dimensional ultrasonic image is formed based on the volume data obtained thereby. Several methods have been proposed for obtaining volume data.
第1の方法は、1Dアレイ振動子とそれを機械的に走査する機構とを備えたプローブを利用する方法である。第2の方法は、2Dアレイ振動子を備えたプローブを利用する方法である。第1及び第2の方法では、形成される三次元空間が比較的小さいため、大きな組織(例えば妊娠後期における胎盤や胎児)の全体を1つの三次元画像として表現することは困難である。その代替案として、プローブ内に大きな振動子及び大きな走査機構を設け、これにより大きな三次元計測空間を形成することが考えられる。しかし、その場合には、プローブが大型化し重量化し、操作性が著しく低下してしまう。同時に、患者に対して違和感あるいは圧迫感を与えてしまう。 The first method uses a probe including a 1D array transducer and a mechanism for mechanically scanning the transducer. The second method uses a probe provided with a 2D array transducer. In the first and second methods, since the formed three-dimensional space is relatively small, it is difficult to represent the entire large tissue (for example, the placenta or fetus in the late pregnancy) as one three-dimensional image. As an alternative, it is conceivable to provide a large transducer and a large scanning mechanism in the probe, thereby forming a large three-dimensional measurement space. However, in that case, the probe becomes large and heavy, and the operability is significantly reduced. At the same time, the patient feels uncomfortable or oppressive.
第3の方法として、1Dアレイ振動を備えたプローブを体表上において手動で走査するものがある。この場合、プローブの位置及び姿勢(つまり、各ビーム走査面の座標情報)は、エンコーダ、磁気センサ、光学的センサ等の測位システムにより計測される。しかし、手動走査方式の場合には、ボリュームデータを構成するビーム走査面の配列が崩れやすいし、また、ボリュームデータを構成する際にビーム走査面を高速で移動させることが困難である。 A third method is to manually scan a probe with 1D array vibration on the body surface. In this case, the position and orientation of the probe (that is, coordinate information of each beam scanning plane) are measured by a positioning system such as an encoder, a magnetic sensor, or an optical sensor. However, in the case of the manual scanning method, the arrangement of the beam scanning planes constituting the volume data is likely to be lost, and it is difficult to move the beam scanning planes at a high speed when configuring the volume data.
以上から、医療の分野において、より的確な診断のために、あるいは、より正確な組織の計測のために、ビーム走査面の電子的走査又は機械的走査を用いつつも、大きな組織の三次元超音波画像を形成できる、新しい方法が切望されている。なお、上記特許文献1には、MR装置、CT装置、US装置等においてそれぞれ取得された複数のデータをグローバル座標系に従って保存する技術が記載されている。しかし、各データは保存後も互いに独立しており、それらは統合されていない。
From the above, in the medical field, for more accurate diagnosis or for more accurate tissue measurement, the electronic scanning or mechanical scanning of the beam scanning surface is used, but the 3D New methods that can form sonic images are eagerly desired.
本発明の目的は、大きな組織の三次元画像を形成することにある。あるいは、本発明の目的は、ビーム走査面を電子的走査又は機械的走査する小型のプローブを利用しつつも、大きな三次元画像化空間を形成できるようにすることにある。 An object of the present invention is to form a three-dimensional image of a large tissue. Alternatively, an object of the present invention is to make it possible to form a large three-dimensional imaging space while using a small probe that electronically or mechanically scans the beam scanning plane.
本発明は、複数のローカルボリュームデータに基づいて統合ボリュームデータを生成する手段であって、前記各ローカルボリュームデータを規定するローカル座標系と前記統合ボリュームデータを規定するグローバル座標系との間の関係を表す関係情報に基づいて、前記複数のローカルボリュームデータを統合する処理を実行することにより、前記統合ボリュームデータを生成する統合手段と、前記統合ボリュームデータに基づいて三次元画像を形成する画像形成手段と、を含むことを特徴とする超音波ボリュームデータ処理装置に関するものである。 The present invention is a means for generating integrated volume data based on a plurality of local volume data, the relationship between a local coordinate system defining each local volume data and a global coordinate system defining the integrated volume data An integration unit that generates the integrated volume data by executing a process of integrating the plurality of local volume data based on the relationship information representing the image, and an image formation that forms a three-dimensional image based on the integrated volume data And an ultrasonic volume data processing apparatus.
上記構成によれば、複数のローカルボリュームデータを、それぞれに対応付けられた関係情報を利用して統合し、これによって統合ボリュームデータを構築できる。つまり、1回の取り込みではカバーできない大きさをもった三次元範囲を表す大型ボリュームデータを取得できる。よって、今まで特定組織の一部分しか三次元画像に表示できなかった場合でも、上記手法を利用することにより、特定組織の全体を三次元画像として表示することが可能である。勿論、そのような特定組織について三次元形状の計測(例えば体積演算)を行うことも可能となる。上記の手法は、プローブを移動させながら、同時に、複数のフレームデータを取得する従来方法とは異なり、各ローカルボリュームデータの取得時においては、基本的に、プローブを静止状態におけるので、1つのローカルボリュームデータを構成する走査面の配列の崩れという問題が生じ難い。また、この手法によれば、走査面の電子走査又は機械走査により、1つのボリュームデータを高速に取得できるという利点も得られる。しかも、広範囲にわたる統合ボリュームデータを構築できるので、今まで形成することが困難であった三次元画像を提供でき、また、今まで計測することが困難であった組織計測を実現できる。 According to the above configuration, a plurality of local volume data can be integrated using the relationship information associated with each of them, and thereby integrated volume data can be constructed. That is, large volume data representing a three-dimensional range having a size that cannot be covered by a single capture can be acquired. Therefore, even when only a part of the specific tissue can be displayed on the three-dimensional image until now, the whole of the specific tissue can be displayed as a three-dimensional image by using the above method. Of course, it is also possible to measure a three-dimensional shape (such as volume calculation) for such a specific tissue. Unlike the conventional method of acquiring a plurality of frame data at the same time while moving the probe, the above method is basically in a stationary state because each probe is in a stationary state when acquiring each local volume data. The problem that the arrangement of the scanning planes constituting the volume data is not likely to occur. Further, according to this method, there is an advantage that one volume data can be acquired at high speed by electronic scanning or mechanical scanning of the scanning surface. Moreover, since a wide range of integrated volume data can be constructed, it is possible to provide a three-dimensional image that has been difficult to form and to realize tissue measurement that has been difficult to measure.
ローカルボリュームデータは、2Dアレイ振動子を備えた3Dプローブ、又は、1Dアレイ振動子とその機械走査を行う機構とを備えた3Dプローブを用いて取得することが可能である。関係情報は、グローバル座標系とローカル座標系との関係を定義するものであり、それはプローブの座標情報そのものであってもよいし、その座標情報を変換等することによって生成される情報であってもよい。統合処理は、個々のローカルボリュームデータの取得と同時進行で行うこともできるし、複数のローカルボリュームデータの取得が完結した以降に行うこともできる。前者に関し、段階的に成長する統合ボリュームデータに基づいて段階的に成長する三次元画像を表示するようにすれば、次にどの部位に対して超音波の送受波を行えばよいのかの判断が容易となる。また、そのような構成によれば、画質不足の部分に対して新しいローカルボリュームデータをあてがって、その部分の画質を向上させる等の操作が容易となる。超音波ボリュームデータ処理装置は、超音波診断装置により構成されてもよいし、汎用コンピュータにより構成されてもよい。ローカルボリュームデータは望ましくは組織画像形成用のデータであるが、それが血流画像形成用のドプラデータであってもよい。 The local volume data can be acquired using a 3D probe including a 2D array transducer or a 3D probe including a 1D array transducer and a mechanism for performing mechanical scanning thereof. The relationship information defines the relationship between the global coordinate system and the local coordinate system, and may be the coordinate information itself of the probe, or information generated by converting the coordinate information. Also good. The integration process can be performed simultaneously with the acquisition of individual local volume data, or can be performed after the acquisition of a plurality of local volume data is completed. Regarding the former, if a three-dimensional image that grows in stages is displayed based on the integrated volume data that grows in stages, it is possible to determine which part should be subjected to ultrasonic wave transmission and reception next. It becomes easy. Further, according to such a configuration, an operation such as assigning new local volume data to a portion with insufficient image quality and improving the image quality of the portion becomes easy. The ultrasonic volume data processing apparatus may be configured by an ultrasonic diagnostic apparatus or a general-purpose computer. The local volume data is preferably data for tissue image formation, but it may be Doppler data for blood flow image formation.
望ましくは、前記複数のローカルボリュームデータを順番に取得するプローブと、前記各ローカルボリュームデータを取得する際に前記プローブについての座標情報を取得する手段と、を含み、前記複数のローカルボリュームデータは、相互に部分的に重複した関係にあり、且つ、相互に時間的に異なる関係にあり、前記関係情報は、前記座標情報であり又は前記座標情報に基づいて生成される。上記構成によれば、プローブが可搬型の送受波器として構成され、ユーザー操作によって生体表面へのプローブの当接位置や当接姿勢を任意に変更可能である。関係情報によって統合ボリュームデータが構成されるので、ローカルボリュームデータの位置や姿勢を厳密に定める必要はない。本発明は、複数のローカルボリュームデータが相互に離間又は隣接した状態であっても適用できるものであるが、複数のローカルボリュームデータ間において部分的なオーバーラップが生じるように各三次元送受波空間(各ローカル座標系)を定めるのが望ましい。但し、上記構成は、スキャナあるいはロボットによって支持されるプローブを利用する場合においても適用することが可能である。なお、例えば2つのローカルボリュームデータが完全に重複していても、関係情報を利用して統合処理が行われるので、格別の支障が生じるものではない。そのような重複した取り込みは寧ろ画質向上に寄与するものである。対象となる組織は静的な組織であるのが望ましく、そのような組織であれば、統合ボリュームデータを構成する際における時相ずれの問題を解消又は軽減できる。もっとも、心電信号等の同期信号に基づいて特定時相で複数のローカルボリュームデータを取得し、それらを統合することも可能である。 Preferably, the probe includes a probe that sequentially acquires the plurality of local volume data, and a unit that acquires coordinate information about the probe when the local volume data is acquired. They are in a partially overlapping relationship with each other and in a mutually different relationship in time, and the relationship information is the coordinate information or is generated based on the coordinate information. According to the said structure, a probe is comprised as a portable transducer, and the contact position and contact attitude | position of a probe to the biological body surface can be arbitrarily changed by user operation. Since the integrated volume data is configured by the relationship information, it is not necessary to strictly determine the position and orientation of the local volume data. The present invention can be applied even when a plurality of local volume data are separated from each other or adjacent to each other, but each three-dimensional transmission / reception space has a partial overlap between the plurality of local volume data. It is desirable to define (each local coordinate system). However, the above configuration can also be applied when using a probe supported by a scanner or a robot. For example, even if two local volume data are completely duplicated, since the integration process is performed using the relationship information, no particular trouble occurs. Rather, such overlapping capture contributes to improving image quality. It is desirable that the target organization is a static organization, and such an organization can solve or reduce the problem of time lag when configuring the integrated volume data. However, it is also possible to acquire a plurality of local volume data at a specific time phase based on a synchronization signal such as an electrocardiogram signal and integrate them.
望ましくは、前記統合手段は、前記複数のローカルボリュームデータに対する補間処理により、前記グローバル座標系にマッピングする補間データ群を生成する補間処理部を有し、前記統合ボリュームデータは前記補間データ群により構成される。グローバル座標系とローカル座標系との間においては、一般に、データ配列に相違があるので、その相違に対応するために補間処理を適用するのが望ましい。補間処理としては三次元補間処理を適用するのが望ましいが、二次元補間処理等の他の補間処理を適用するようにしてもよいし、近傍値の選択及び代入という簡便な補間処理を適用するようにしてもよい。 Preferably, the integration unit includes an interpolation processing unit that generates an interpolation data group to be mapped to the global coordinate system by an interpolation process on the plurality of local volume data, and the integrated volume data is configured by the interpolation data group. Is done. Since there is generally a difference in data arrangement between the global coordinate system and the local coordinate system, it is desirable to apply an interpolation process in order to cope with the difference. As the interpolation processing, it is desirable to apply the three-dimensional interpolation processing, but other interpolation processing such as two-dimensional interpolation processing may be applied, or simple interpolation processing such as selection and substitution of neighboring values is applied. You may do it.
望ましくは、前記統合手段は、更に、前記グローバル座標系における同一アドレスに複数の補間データが与えられて競合状態が生じた場合に調停処理を実行する調停処理部を有する。複数のローカルボリュームデータ間に重複部分があるため、その重複部分において一般に上記調停処理が必要となる。望ましくは、前記調停処理部は、前記競合状態にある複数の補間データに対して平均処理を適用する。望ましくは、前記調停処理部は、前記複数のボリュームデータの取得順序に応じて、前記競合状態にある複数の補間データに対して重み付け平均処理を適用する。望ましくは、前記調停処理部は、前記競合状態にある複数の補間データの中から、最新のボリュームデータから生成された最新の補間データを選択する。 Preferably, the integration unit further includes an arbitration processing unit that executes an arbitration process when a plurality of interpolation data is given to the same address in the global coordinate system and a race condition occurs. Since there is an overlapping portion between a plurality of local volume data, the arbitration process is generally required at the overlapping portion. Preferably, the arbitration processing unit applies an average process to the plurality of interpolation data in the competitive state. Preferably, the arbitration processing unit applies a weighted average process to the plurality of interpolated data in the competing state according to the acquisition order of the plurality of volume data. Preferably, the arbitration processing unit selects the latest interpolation data generated from the latest volume data from the plurality of interpolation data in the competitive state.
望ましくは、前記補間処理部は、前記複数のローカルボリュームデータの取得順序で前記各ローカルボリュームデータに対して個別的に補間処理を適用し、これにより、2番目以降の各ローカルボリュームデータが取得される都度、前記統合ボリュームデータが更新され、前記画像形成手段は、前記統合ボリュームデータの更新に応じて前記三次元画像を更新する。この構成によれば、ローカルボリュームデータに取得に伴って統合ボリュームデータがリフレッシュされ、また三次元画像もリフレッシュされるので、過去の送受波結果を直ちに評価できる、次の送受波位置を定めやすい、等の利点を得られる。 Preferably, the interpolation processing unit individually applies interpolation processing to the local volume data in the order of acquiring the plurality of local volume data, whereby second and subsequent local volume data are acquired. Each time the integrated volume data is updated, the image forming unit updates the three-dimensional image in response to the update of the integrated volume data. According to this configuration, the integrated volume data is refreshed as the local volume data is acquired, and the three-dimensional image is also refreshed, so that it is possible to immediately evaluate the past transmission / reception results, and to easily determine the next transmission / reception wave position. Etc. can be obtained.
望ましくは、前記補間処理部は、前記複数のローカルボリュームデータの取得が完結した後に前記補間処理を実行し、前記補間処理部は、前記複数のローカルボリュームデータに跨って存在する参照データセットに基づいて前記グローバル座標系における注目座標に与える補間データを生成する機能を有する。 Preferably, the interpolation processing unit executes the interpolation processing after acquisition of the plurality of local volume data is completed, and the interpolation processing unit is based on a reference data set existing across the plurality of local volume data. A function of generating interpolation data to be given to the target coordinate in the global coordinate system.
望ましくは、前記統合ボリュームデータは、1つのローカルボリュームデータ内に入りきらないサイズをもった大型組織を包含するサイズを有し、前記三次元画像は前記大型組織を表す画像である。望ましくは、前記大型組織は、胎児又は胎盤である。特に妊娠後期における胎児又は胎盤を1つのボリュームデータに収めるのは従来困難であったが、上記構成によれば、そのような組織を1つの統合ボリュームデータ内に包含できることから、今まで提供できなかった三次元画像及び全体計測データの提供を行えるという利点が得られる。 Preferably, the integrated volume data has a size including a large tissue having a size that does not fit in one local volume data, and the three-dimensional image is an image representing the large tissue. Preferably, the large tissue is a fetus or placenta. In particular, it has been difficult in the past to fit a fetus or placenta in late pregnancy into a single volume data, but according to the above configuration, such a tissue can be included in a single integrated volume data, and thus cannot be provided so far. In addition, an advantage is provided that three-dimensional images and whole measurement data can be provided.
本発明によれば、大きな組織の三次元超音波画像を形成できる。あるいは、ビーム走査面を電子的走査又は機械的走査する一般的なプローブを利用しつつも、大きな三次元計測空間を形成できる。 According to the present invention, a three-dimensional ultrasonic image of a large tissue can be formed. Alternatively, a large three-dimensional measurement space can be formed while using a general probe that electronically scans or mechanically scans the beam scanning surface.
以下、本発明の好適な実施形態を図面に基づいて説明する。 DESCRIPTION OF EXEMPLARY EMBODIMENTS Hereinafter, preferred embodiments of the invention will be described with reference to the drawings.
本願実施形態においては、3Dプローブを生体表面上の任意の位置に位置決めし、その状態で二次元ビーム走査を実行して得られる三次元データを“ローカルボリュームデータ”と称することにする。それは“ローカル座標系”によって規定されるものである。生体に対する3Dプローブの位置を変更しつつ、各位置において二次元ビーム走査を繰り返せば、その都度、ローカルボリュームデータが得られる。それらのローカルボリュームデータは互いに異なるローカル座標系によって規定されるものであり、一般には、相互に時間的に相違し且つ部分的にオーバーラップしている関係にある。また、複数のローカルボリュームデータを統合して得られる大きな三次元データを“統合ボリュームデータ”と称することにする。それは“グローバル座標系”によって規定されるものである。 In the present embodiment, three-dimensional data obtained by positioning a 3D probe at an arbitrary position on the surface of a living body and executing two-dimensional beam scanning in this state is referred to as “local volume data”. It is defined by the “local coordinate system”. If two-dimensional beam scanning is repeated at each position while changing the position of the 3D probe with respect to the living body, local volume data is obtained each time. These local volume data are defined by different local coordinate systems, and are generally in a temporally different and partially overlapping relationship. Large three-dimensional data obtained by integrating a plurality of local volume data is referred to as “integrated volume data”. It is defined by the “global coordinate system”.
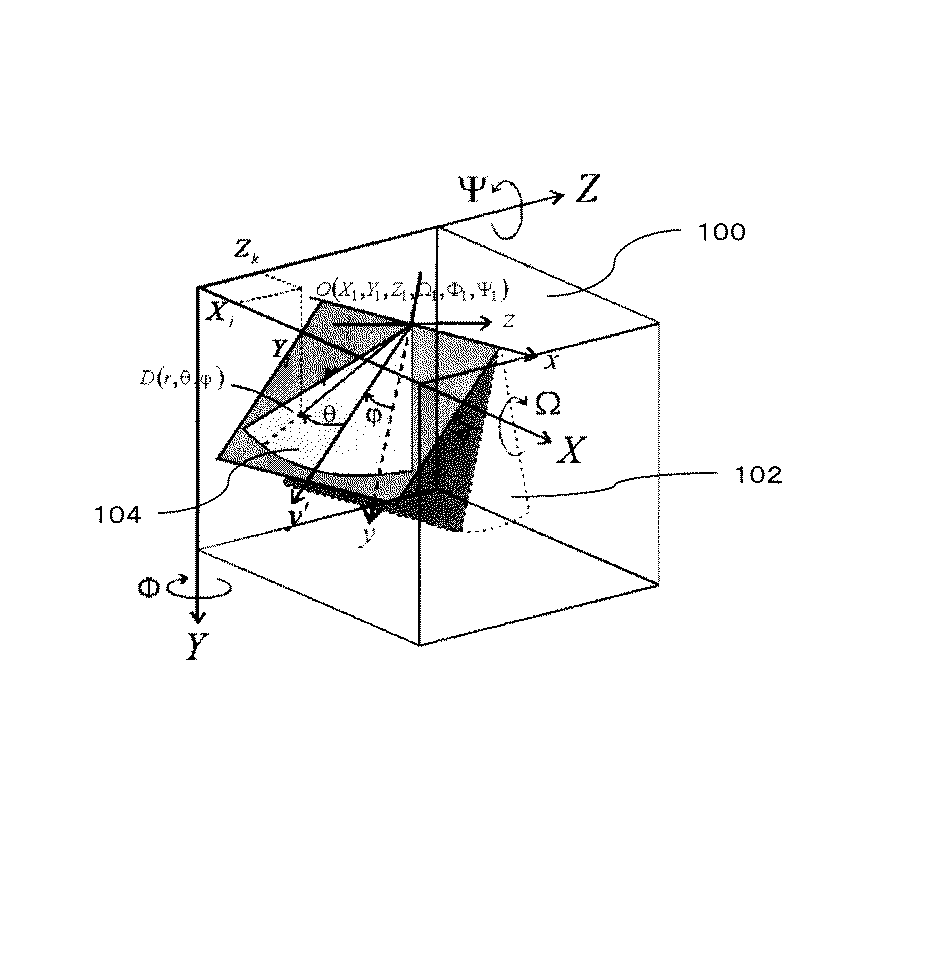
図1を用いて、上記で説明したグローバル座標系とローカル座標系との関係を説明する。図1において、符号100はグローバル座標系により規定される空間(統合ボリュームデータ空間)を示しており、符号102はローカル座標系により規定される空間(ローカルボリュームデータ空間)を示している。また、符号104は超音波ビームの一次元走査によって構成される二次元の走査面を表している。
The relationship between the global coordinate system described above and the local coordinate system will be described with reference to FIG. In FIG. 1,
グローバル座標系は絶対座標系であり、図1においては、当該グローバル座標系は、互いに直交するX軸,Y軸,Z軸で定義される直交座標系である。その空間内の注目点の座標は(Xi,Yj,Zk)で表され、その注目点の輝度値(ボクセル値)はD(Xi,Yj,Zk) で表される。ただし、1≦i,j,k≦Nである。ここで、Nはグローバル座標系の1辺の長さを表す。一方、ローカル座標系は、絶対座標系に対して相対的に運動する相対座標系であり、図1において、ローカル座標系は、x軸、y軸、z軸で定義される直交座標系である。また、ローカル座標系は以下のように極座標系として捉えることもできる。 The global coordinate system is an absolute coordinate system. In FIG. 1, the global coordinate system is an orthogonal coordinate system defined by an X axis, a Y axis, and a Z axis that are orthogonal to each other. The coordinates of the point of interest in the space are represented by (X i , Y j , Z k ), and the luminance value (voxel value) of the point of interest is represented by D (X i , Y j , Z k ). However, 1 ≦ i, j, k ≦ N. Here, N represents the length of one side of the global coordinate system. On the other hand, the local coordinate system is a relative coordinate system that moves relative to the absolute coordinate system. In FIG. 1, the local coordinate system is an orthogonal coordinate system defined by the x axis, the y axis, and the z axis. . The local coordinate system can also be regarded as a polar coordinate system as follows.
x軸,y軸,z軸が交わる点Oを、ローカル座標系の原点とし、同時にそれをr,θ,φで定義される極座標の原点とした場合、ローカルボリュームデータ内の注目点(注目ボクセル)は、ある走査面104上の点であり、その走査面104はxy平面をx軸回りに角度φ回転させた面である。当該注目点は、その走査面104上の中心軸であるy’軸から角度θだけ偏向した方位における、原点Oから距離rだけ離れた点である。つまり、当該注目点の座標は(r,θ,φ)として表され、その輝度はD(r,θ,φ)で表される。
When the point O where the x-axis, y-axis, and z-axis intersect is the origin of the local coordinate system and at the same time the origin of the polar coordinates defined by r, θ, and φ, the point of interest in the local volume data (target voxel) ) Is a point on a
グローバル座標系とローカル座標系との関係は、本実施形態では、グローバル座標系に対する、ローカル座標系の原点Oの属性として特定される。すなわち、その原点Oは、グローバル座標系において、O(X1,Y1,Z1,Ω1,Φ1,Ψ1)と定義される。ここで、前半のX1,Y1,Z1は原点Oの座標値を表し、後半のΩ1,Φ1,Ψ1は、ローカル座標系についてのX軸、Y軸、Z軸回りの回転角度を表すものである。2つの座標系の関係を表す情報としては各種のものが考えられる。ちなみに、ビームデータは超音波ビーム(受信ビーム)1本分に相当し、原点Oから深さ方向に並ぶ複数のエコーデータ(ボクセル値の列)により構成される。走査面に相当するフレームデータは複数のビームデータにより構成され、ローカルボリュームデータは複数のフレームデータにより構成される。 In this embodiment, the relationship between the global coordinate system and the local coordinate system is specified as an attribute of the origin O of the local coordinate system with respect to the global coordinate system. That is, the origin O is defined as O (X 1 , Y 1 , Z 1 , Ω 1 , Φ 1 , Ψ 1 ) in the global coordinate system. Here, X 1 , Y 1 , Z 1 in the first half represent the coordinate values of the origin O, and Ω 1 , Φ 1 , Ψ 1 in the second half represent rotations about the X, Y, and Z axes about the local coordinate system It represents an angle. Various types of information representing the relationship between the two coordinate systems can be considered. Incidentally, the beam data corresponds to one ultrasonic beam (received beam), and is constituted by a plurality of echo data (sequence of voxel values) arranged in the depth direction from the origin O. The frame data corresponding to the scanning plane is composed of a plurality of beam data, and the local volume data is composed of a plurality of frame data.
統合ボリュームデータは、複数のローカルボリュームデータを統合することにより構築されるものである。具体的には、グローバル座標系を構成する各座標点の値が、1又は複数のローカルボリュームデータに基づいて生成される。複数のローカルボリュームデータをグローバル座標系に反映させる方法としては、幾つかの方法が考えられる。第1の方法は、グローバル座標系の各座標点を順次選択し、その選択された座標点にマッピングするデータを、1又は複数のローカルボリュームデータから順次生成する方法である。第2の方法は、各ローカルボリュームデータを構成する各データを順次選択し、その選択されたデータをグローバル座標系に順次マッピングする方法である。いずれの場合でも、グローバルボリュームデータの構築時に、各ローカル座標系とグローバル座標系との間の関係(座標系関係情報)が利用される。グローバル座標系上の各座標点に与えるデータを決定する際には、望ましくは三次元補間処理が適用され、それに代替するものとして、例えば、近傍座標値の選択処理があげられる。座標系関係情報は、座標変換のためのデータ列又は関数式として構成し得る。 The integrated volume data is constructed by integrating a plurality of local volume data. Specifically, the value of each coordinate point constituting the global coordinate system is generated based on one or a plurality of local volume data. Several methods are conceivable as a method of reflecting a plurality of local volume data in the global coordinate system. The first method is a method of sequentially selecting each coordinate point in the global coordinate system and sequentially generating data to be mapped to the selected coordinate point from one or a plurality of local volume data. The second method is a method of sequentially selecting each data constituting each local volume data and sequentially mapping the selected data to the global coordinate system. In either case, the relationship between each local coordinate system and the global coordinate system (coordinate system relationship information) is used when constructing the global volume data. When determining the data to be given to each coordinate point on the global coordinate system, preferably, a three-dimensional interpolation process is applied. As an alternative, for example, a process for selecting a neighboring coordinate value is given. The coordinate system relation information can be configured as a data string or a function expression for coordinate conversion.
以下に、図2に示す工程図を用いて、上記第1の方法について詳細な説明を行う。以下の例では、1つのボリュームデータ内から選択された参照データセットに基づいて1つの補間データが生成されているが、勿論、複数のボリュームデータに跨って存在する参照データセットに基づいて1つの補間データが生成されてもよい。また、複数の補間データに対して更に補間処理を適用して多重補間データを生成するようにしてもよい。 Hereinafter, the first method will be described in detail with reference to the process chart shown in FIG. In the following example, one interpolation data is generated based on a reference data set selected from one volume data. Of course, one interpolation data is generated based on a reference data set existing across a plurality of volume data. Interpolated data may be generated. Further, multiple interpolation data may be generated by further applying interpolation processing to a plurality of interpolation data.
さて、S101では、グローバル座標系において、いずれか1つの座標点(注目点)が指定される。この座標点の指定順序は予め定められている。S102では、対象となっているローカル座標系において、S101で指定された座標点に対応する対応点(本実施形態では極座標点)が演算される。次に、S103で、その対応点が、対象となっているローカルボリュームデータ内に(つまり有効範囲内に)属するのか否かが判断される。S103の判断結果がNOであれば処理がS109へ移行する。一方、S103の判断結果がYESであれば、S104において、対応点の近傍に存在する8個の座標点(8個の参照点)上の8個のデータ(8個の参照データ)が特定される。ここで、対応点がローカル座標系上のいずれかの座標点に一致すれば、補間処理を省略してもよい。あるいは、最も近い座標点のデータをそのまま対応点の補間データとして利用することもできる。S108では、対応点について重みパラメータα,β,γが特定される。これについては後に説明する。S106では、重みパラメータα,β,γを利用しつつ、8個の参照データからなる参照データセットに基づいて、対応点の値が演算される。これは公知のトライリニア法であり、その手法の具体的内容については後に説明する。 In S101, any one coordinate point (point of interest) is designated in the global coordinate system. The order in which the coordinate points are specified is determined in advance. In S102, the corresponding point (polar coordinate point in this embodiment) corresponding to the coordinate point specified in S101 is calculated in the local coordinate system that is the object. Next, in S103, it is determined whether or not the corresponding point belongs to the target local volume data (that is, within the effective range). If the determination result in S103 is NO, the process proceeds to S109. On the other hand, if the determination result in S103 is YES, eight data (eight reference data) on eight coordinate points (eight reference points) existing in the vicinity of the corresponding point are specified in S104. The Here, the interpolation processing may be omitted if the corresponding point matches any coordinate point on the local coordinate system. Alternatively, the data of the nearest coordinate point can be used as the interpolation data of the corresponding point as it is. In S108, the weight parameters α, β, γ are specified for the corresponding points. This will be described later. In S106, the value of the corresponding point is calculated based on the reference data set composed of the eight reference data while using the weight parameters α, β, γ. This is a known trilinear method, and the specific contents of the method will be described later.
S107では、グローバル座標系上における、S101で指定された座標点に既にデータが格納されているか否かが判断され、その判断結果がNOであれば、処理がS109へ移行する。S107の判断結果がYESであればS108で調停処理が実行される。例えば、既に格納されているデータを、上記S106で演算された新しいデータに置き換える処理が実行される。S107の処理を省略し、常に上書きを行うようにしてもよい。調停処理において、単純加算平均、重み付け加算平均等を行えば、複数の補間データを考慮した補間値を求めることができる。S109では、グローバル座標系におけるすべての座標点について上記処理が完了したのか否かが判断され、処理が未了の座標点があれば、S101以降の各工程が再び実行される。 In S107, it is determined whether data is already stored at the coordinate point specified in S101 on the global coordinate system. If the determination result is NO, the process proceeds to S109. If the determination result in S107 is YES, the arbitration process is executed in S108. For example, a process of replacing the already stored data with the new data calculated in S106 is executed. The process of S107 may be omitted and overwriting may be always performed. In the arbitration process, if simple addition averaging, weighted addition averaging, or the like is performed, an interpolation value considering a plurality of interpolation data can be obtained. In S109, it is determined whether or not the above processing has been completed for all coordinate points in the global coordinate system. If there is a coordinate point for which processing has not been completed, each step after S101 is executed again.
本実施形態では、S108において調停処理が実行されており、つまり、グローバル座標系における同一座標点に複数の補間データが競合して与えられた場合に、それらの補間データに基づいて実際に格納するデータが決定されている。調停処理において、時間軸上で後に取得されたローカルボリュームデータから生成される補間データを優先的に選択すれば、最新の情報を統合ボリュームデータに反映させることができるという利点を得られる。その一方、それらの補間データから平均値を求めれば、複数の補間データが考慮されたデータを生成できるので、S/N比を向上できるという利点がある。その場合に、ローカルデータ取得順序に応じて複数の補間データの重み付け平均処理を適用すれば、最新データを優先させつつも過去のデータにより大きな重みを与えてそれを考慮できるという利点が得られる。 In the present embodiment, the arbitration process is executed in S108, that is, when a plurality of pieces of interpolation data are given in competition to the same coordinate point in the global coordinate system, they are actually stored based on the interpolation data. Data has been determined. In the arbitration process, if interpolation data generated from local volume data acquired later on the time axis is preferentially selected, the latest information can be reflected in the integrated volume data. On the other hand, if an average value is obtained from these interpolation data, data in which a plurality of interpolation data is taken into account can be generated, and there is an advantage that the S / N ratio can be improved. In that case, if weighted average processing of a plurality of interpolation data is applied in accordance with the local data acquisition order, there is an advantage that it is possible to give consideration to a larger weight given to past data while giving priority to the latest data.
上記S103における具体的な判定方法について説明する。η回目のローカルボリュームデータ取得時に、ローカル座標系の原点座標Oη(X,Y,Z)及びx軸,y軸,z軸が特定される。ここで、ηは、1≦η≦ηMAXで定義され、ηMAXは超音波診断装置あるいはボリュームデータ処理装置の記憶容量によって制限される最大値である。ローカル座標系は一般に3Dプローブを基準として定義される運動座標系であり、その原点座標は例えば送受波原点である。グローバル座標系とローカル座標系との間を定義する関係情報は、3Dプローブの位置(及び姿勢)を検出することにより容易に取得できる。その場合には三次元磁気計測、三次元光学計測、等の手法を利用すればよい。グローバル座標系における各座標点は次の(1)式によりローカル座標系上の対応点に変換される。但し、(T)は後に説明するR-1に相当する。 A specific determination method in S103 will be described. During the eta-th local volume data acquisition, the origin coordinates O eta of the local coordinate system (X, Y, Z) and the x-axis, y-axis, z-axis is identified. Here, η is defined by 1 ≦ η ≦ η MAX , and η MAX is a maximum value limited by the storage capacity of the ultrasonic diagnostic apparatus or the volume data processing apparatus. The local coordinate system is a motion coordinate system generally defined with reference to a 3D probe, and the origin coordinate is, for example, a transmission / reception origin. Relation information defining the global coordinate system and the local coordinate system can be easily obtained by detecting the position (and orientation) of the 3D probe. In that case, methods such as three-dimensional magnetic measurement and three-dimensional optical measurement may be used. Each coordinate point in the global coordinate system is converted into a corresponding point on the local coordinate system by the following equation (1). However, (T) corresponds to R -1 described later.
この変換よって得られた対応点の極座標は(ri,θj,φk)で表される。ここでは、r,θ,φを具体化するためにそれらに添字i,j,kを与えた。この時、0<ri≦rMAX且つ−θMAX≦θj≦θMAXかつ−φMAX≦φk≦φMAXが満たされるならば、対応点はローカルボリュームデータ内につまり有効範囲内に存在すると判断できる。ここで、θの範囲は走査面上のビーム走査範囲を示しており、φの範囲は走査面の揺動角度範囲を示している。但し、適用される電子走査方式又は機械走査方式に応じてボリュームデータの形状及び範囲は変動するので、座標系の定義も変わりうる。 The polar coordinates of the corresponding points obtained by this conversion are represented by (r i , θ j , φ k ). Here, subscripts i, j, and k are given to embody r, θ, and φ. At this time, if 0 <r i ≦ r MAX and −θ MAX ≦ θ j ≦ θ MAX and −φ MAX ≦ φ k ≦ φ MAX are satisfied, the corresponding point exists in the local volume data, that is, in the effective range. It can be judged. Here, the range of θ indicates the beam scanning range on the scanning plane, and the range of φ indicates the swing angle range of the scanning plane. However, since the shape and range of the volume data vary depending on the applied electronic scanning method or mechanical scanning method, the definition of the coordinate system can also change.
上記S106における8点の参照点は具体的には以下のように特定される。すなわち、図3に示すように、上記の(1)式による変換で得られた対応点を基準として、対応点よりも原点側に存在する直前の4つの参照点が特定される。図3においては、それらがMRN1-MRN4で表されている。同様に、対応点よりも奥側に存在する直後の4つの参照点が特定される。図3においては、それらがMRN5-MRN8で表されている。上記S106においては、図3に示す関係を前提として、以下の(2)式に従って重みパラメータである比率αが特定され、同様に、以下の(3)式に従って重みパラメータである比率βが特定され、更に以下の(4)式に従って重みパラメータである比率γが特定される。 Specifically, the eight reference points in S106 are specified as follows. That is, as shown in FIG. 3, the four reference points immediately before the corresponding point are specified with reference to the corresponding point obtained by the conversion by the above equation (1). In FIG. 3, they are represented by MRN1-MRN4. Similarly, four reference points immediately after the corresponding point are specified. In FIG. 3, they are represented by MRN5-MRN8. In S106 described above, on the assumption of the relationship shown in FIG. 3, the ratio α as the weight parameter is specified according to the following equation (2), and similarly the ratio β as the weight parameter is specified according to the following equation (3). Further, the ratio γ, which is a weight parameter, is specified according to the following equation (4).
そして、M1,M2,MM1の各点の値は、重み付けパラメータα,βを利用して以下の(5)-(7)式から求められ、更に、M3,M4,MM2の各点の値も、重み付けパラメータα,βを利用して以下の(8)-(10)式から求められる。最終的に、対応点に相当する補間値(補間データ)Dが以下の(11)式から演算される。 The values of the points M1, M2, and MM1 are obtained from the following equations (5) to (7) using the weighting parameters α and β, and the values of the points M3, M4, and MM2 are also calculated. Using the weighting parameters α and β, the following equations (8) to (10) are obtained. Finally, an interpolation value (interpolation data) D corresponding to the corresponding point is calculated from the following equation (11).
ちなみに、x,y,zとr,θ,φとの関係は以下の(12)式で表される。 Incidentally, the relationship between x, y, z and r, θ, φ is expressed by the following equation (12).
次に、X,Y,Zとx,y,zの関係は以下の(13)-(16)式で表され、(16)式中のR-1は上記(1)式の(T)であり、(16)式と(1)式は同一である。 Next, the relationship between X, Y, Z and x, y, z is expressed by the following equations (13)-(16), and R -1 in equation (16) is (T) in the above equation (1). (16) and (1) are the same.
なお、x,y,zからr,θ,φを求めるには以下の(17)-(19)式を使えばよい。 In order to obtain r, θ, and φ from x, y, and z, the following equations (17) to (19) may be used.
以上説明した本実施形態の方法によれば、3Dプローブを用いて1回のスキャンで取得できる1つのローカルボリュームデータが小さくても、3Dプローブの位置を変えて取得された複数のローカルボリュームデータを統合することにより、大きな統合ボリュームデータを構成でき、それに基づいて三次元画像を生成することが可能となる。よって、この方法によれば、大型機構を用いなくても、例えば、胎児、胎盤、乳房といった比較的大きな組織を三次元画像として表すことが可能となる。絶対空間内における(グローバル座標系における)3Dプローブの位置及び姿勢を表す座標データは、関係情報として、ローカルボリュームデータに付随する情報としてメモリ上に格納される。複数のボリュームデータの統合処理は、ソフトウエア処理によって実現することができ、それは医療用の超音波診断装置に搭載され、あるいは、コンピュータに搭載されるものである。 According to the method of the present embodiment described above, a plurality of local volume data acquired by changing the position of the 3D probe is obtained even if one local volume data that can be acquired by one scan using the 3D probe is small. By integrating, large integrated volume data can be constructed, and a three-dimensional image can be generated based on the integrated volume data. Therefore, according to this method, it is possible to represent a relatively large tissue such as a fetus, placenta, and breast as a three-dimensional image without using a large mechanism. Coordinate data representing the position and orientation of the 3D probe in the absolute space (in the global coordinate system) is stored on the memory as information associated with the local volume data as relation information. The integration processing of a plurality of volume data can be realized by software processing, which is mounted on a medical ultrasonic diagnostic apparatus or mounted on a computer.
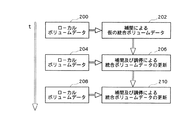
図4には、上述した第1の方法が概念図として示されている。複数のローカルボリュームデータ200,204,208は時系列順で取得される。最初のローカルボリュームデータに対して個別的な補間処理を適用することにより、符号202に示すように、仮の統合ボリュームデータが生成される。但し、この段階においては厳密な意味で統合処理は未だ行われていない。次に、ローカルボリュームデータ204が取得されると、符号206で示すように、当該データに対して個別的に補間処理が適用され、また、必要な調停処理が施されて、更新された統合ボリュームデータが構成される。それに基づいて直ちに三次元画像が形成され、表示内容が更新される。次のローカルボリューデータ208が取得されると、それに対して個別的に補間処理が適用され、また、必要な調停処理が施されて、更新された統合ボリュームデータが構成される。それに基づいて三次元画像が形成され、表示内容が更新される。つまり、ローカルボリュームデータの取得と同時進行で統合処理及び画像形成が行われる。
FIG. 4 shows the above-described first method as a conceptual diagram. A plurality of
図5には上述した第2の方法が概念図として示されている。複数のローカルボリュームデータ200,204,206の取得が完了した時点で、符号212に示すように補間処理が適用されるが、その際、必要に応じて、重複部分については複数のローカルボリュームデータに跨って存在する参照データセットを利用して補間データが生成される。その場合には補間処理が調停処理を兼ねることになる。勿論、補間処理を個別的に行った上で必要に応じて調停処理を適用するようにしてもよい。補間処理212により生成される統合ボリュームデータ214に基づいて三次元画像が形成される。
FIG. 5 shows a conceptual diagram of the second method described above. When the acquisition of the plurality of
図6には、上記において説明した処理を行なえる超音波診断装置の好適な実施形態が示されている。図6は超音波診断装置の全体構成を示すブロック図である。 FIG. 6 shows a preferred embodiment of an ultrasonic diagnostic apparatus capable of performing the processing described above. FIG. 6 is a block diagram showing the overall configuration of the ultrasonic diagnostic apparatus.
被検体10の体表面12上には可搬性送受波器としての3Dプローブ16が当接される。被検体10内には診断対象となる組織14が存在している。この組織14は、例えば妊娠後期における胎児又は胎盤である。そのような組織として、他には羊水、肝臓、乳房等の組織を挙げることができる。
A
3Dプローブ16は本実施形態において2Dアレイ振動子を有している。2Dアレイ振動子は二次元配列された複数の振動素子により構成される。その2Dアレイ振動子により超音波ビームが形成され、その超音波ビームは二次元走査される。超音波ビームの電子走査方式としては電子セクタ走査、電子リニア走査等が知られている。3Dプローブ16に、1Dアレイ振動子を機械的に走査する走査機構を設け、これによって三次元データ取込空間を形成するようにしてもよい。腹部の三次元超音波診断を行う場合には、コンベックス走査方式が適用される3Dプローブを用いるのが望ましい。
The
3Dプローブ16はユーザーによって体表面12上の任意の位置に当接されるものであり、またその当接姿勢も任意に設定することができる。図6には、プローブ16を移動させた後の状態が符号16A及び符号16Bで示されている。複数の位置で順番に三次元超音波診断を行えば、図6に示されるように、複数のローカルボリュームデータ18,18A,18Bを順番に取得することができる。図6においては、各ローカルボリュームデータ18,18A,18Bが二次元的な領域として図示されているが、各ローカルボリュームデータ18,18A,18Bはそれぞれ三次元空間に相当するものである。それらのローカルボリュームデータ18,18A,18Bは互いに部分的に重複した関係を有しており、また、時間的にも互いに異なっている。図示されるように、対象となる組織14の全体が3つのローカルボリュームデータ18,18A,18Bによってカバーされるように3Dプローブ16の当接位置等が定められている。
The
送受信部28は、送信ビームフォーマ及び受信ビームフォーマとして機能するものである。送信時において、送受信部28から複数の送信信号が2Dアレイ振動子に供給される。これによって送信ビームが形成される。生体内からの反射波は、2Dアレイ振動子にて受波され、これによって複数の受信信号が送受信部28へ出力される。送受信部28では複数の受信信号に対する整相加算処理が実行され、これによって整相加算後の受信信号としてビームデータが生成される。そのビームデータは受信ビームに対応したものである。体表面12上に3Dプローブ16を当接した状態を維持しつつ、つまり3Dプローブを移動させないで複数のローカルボリュームデータが取得されてもよい。
The transmission /
測位システム20は、本実施形態において、磁場発生器22、磁気センサユニット24及び座標データ演算部26により構成される。磁場発生器22は三次元磁場を生成するものであり、磁気センサユニット24は三次元磁場を検知し、検知された情報を座標データ演算部26へ出力する。座標データ演算部26は、磁気センサユニットからの情報に基づいて3Dプローブ16の三次元座標データを生成する。その三次元座標データは、3Dプローブ16についての各座標軸上における座標値と各軸周りの回転角度とを表すものである。このように生成された座標データをそのまま座標間関係情報として利用するようにしてもよいし、座標データに基づいて3Dプローブ16の原点についての座標データを再構成し、その際構成された座標データを座標間関係情報として利用するようにしてもよい。いずれにしても、生成された座標データが3Dメモリ32へ出力される。測位方式には各種のもの(例えば光学式センサ等)がある。
In this embodiment, the
一方、ビームデータ処理部30は、送受信部28から出力される各ビームデータに対して信号処理を実行する。その信号処理には検波処理、対数変換処理等が含まれる。ビームデータ処理部30から出力されたビームデータは3Dメモリ32に格納される。
On the other hand, the beam
3Dメモリ32は、複数個のローカルボリュームデータを格納する記憶容量を有している。3Dメモリ32において、各ローカルボリュームデータを構成するエコーデータはローカル座標系に従って特定されるものである。各エコーデータに対する座標変換は補間処理の際に実行されることになる。もちろん、3Dメモリ32のデータの書き込み段階において必要な座標変換処理が行なわれるようにしてもよい。本実施形態では、各ローカルボリュームデータごとにその取得を行った際の座標間関係情報が対応付けられて記憶されている。
The
補間処理部36は、図6に示す構成例において、各ローカルボリュームデータについてそれに対応する座標間関係情報に基づき個別的に補間処理を実行するモジュールである。調停処理部38は3D統合メモリ40上における特定のアドレスに既に補間データが書き込まれており、そのアドレスに現在取得されたローカルボリュームデータに基づく補間データが与えられて競合状態が生じた場合に、それを調停する処理を実行する。上述したように調停処理としては、単純加算平均処理、重み付け加算平均処理、近傍値選択処理等が挙げられる。
In the configuration example shown in FIG. 6, the
3D統合メモリ40は、グローバル座標系により規定される統合ボリュームデータを格納するメモリである。本実施形態では、各ローカルボリュームデータが取得される都度、補間処理及び調停処理が実行され、3D統合メモリ40の内容が更新されることになる。
The 3D integrated
3D画像形成部42は、3D統合メモリ40内に格納された統合ボリュームデータに基づいて三次元画像を構築するモジュールである。三次元画像の構築方法としては、ボリュームレンダリング法、サーフェイスレンダリング法等が知られている。そのように形成された三次元画像の画像データが表示部44に送られる。表示部44には三次元画像が表示される。
The 3D
なお、3D統合メモリ40内に格納された統合ボリュームデータに基づいて、対象組織についての体積等を演算するようにしてもよい。図6には、制御部及び操作パネル等の周辺構成については図示省略されている。
Note that the volume of the target tissue may be calculated based on the integrated volume data stored in the 3D integrated
図6に示す構成例によれば、今まで構築できなかった大型組織についての三次元画像を表示できるという利点がある。しかも、統合ボリュームデータの構築にあたって、ユーザは3Dプローブの当接位置や当接姿勢について厳密な調整は不要であり、対象組織の全体がおよそカバーされるように複数回にわたって三次元超音波診断を行えばよいので、ユーザーの負担は大幅に緩和される。各ローカルボリュームデータの取得の際には3Dプローブ16を動かす必要はないので、従来同様の良好な操作性を維持できる。また、表示部44に表示される三次元画像を観察しながら不足している部分についての三次元診断を速やかに行って所望の三次元画像を迅速に構築できるという利点が得られる。上記実施形態においては、体表面上に当接される3Dプローブが用いられていたが、体腔内に挿入される3Dプローブについても上記同様の手法を適用することが可能である。
According to the configuration example shown in FIG. 6, there is an advantage that a three-dimensional image of a large tissue that could not be constructed until now can be displayed. Moreover, when constructing the integrated volume data, the user does not need to strictly adjust the contact position and contact posture of the 3D probe, and three-dimensional ultrasonic diagnosis is performed multiple times so that the entire target tissue is roughly covered. The user's burden is greatly eased. Since it is not necessary to move the
10 被検体、12 体表面、16 3Dプローブ、18 ローカルボリュームデータ、20 測位システム、32 3Dメモリ、34 統合処理部、36 補間処理部、38 調停処理部、40 3D統合メモリ、42 3D画像形成部、100 統合ボリュームデータ空間、102 ローカルボリュームデータ空間、104 走査面。 10 subjects, 12 body surfaces, 16 3D probe, 18 local volume data, 20 positioning system, 32 3D memory, 34 integration processing unit, 36 interpolation processing unit, 38 arbitration processing unit, 40 3D integration memory, 42 3D image forming unit , 100 integrated volume data space, 102 local volume data space, 104 scan plane.
Claims (11)
前記統合ボリュームデータに基づいて三次元画像を形成する画像形成手段と、
を含むことを特徴とする超音波ボリュームデータ処理装置。 A means for generating integrated volume data based on a plurality of local volume data, wherein the relationship information represents a relationship between a local coordinate system defining each local volume data and a global coordinate system defining the integrated volume data An integration unit for generating the integrated volume data by executing a process for integrating the plurality of local volume data,
Image forming means for forming a three-dimensional image based on the integrated volume data;
An ultrasonic volume data processing apparatus comprising:
前記複数のローカルボリュームデータを順番に取得するプローブと、
前記各ローカルボリュームデータを取得する際に前記プローブについての座標情報を取得する手段と、
を含み、
前記複数のローカルボリュームデータは、相互に部分的に重複した関係にあり、且つ、相互に時間的に異なる関係にあり、
前記関係情報は、前記座標情報であり又は前記座標情報に基づいて生成される、ことを特徴とする超音波ボリュームデータ処理装置。 The apparatus of claim 1.
A probe for sequentially acquiring the plurality of local volume data;
Means for acquiring coordinate information about the probe when acquiring each local volume data;
Including
The plurality of local volume data are in a partially overlapping relationship with each other, and in a temporally different relationship with each other,
The ultrasonic volume data processing apparatus, wherein the relation information is the coordinate information or is generated based on the coordinate information.
前記統合手段は、前記複数のローカルボリュームデータに対する補間処理により、前記グローバル座標系にマッピングする補間データ群を生成する補間処理部を有し、
前記統合ボリュームデータは前記補間データ群により構成される、ことを特徴とする超音波ボリュームデータ処理装置。 The apparatus according to claim 1 or 2,
The integration unit includes an interpolation processing unit that generates an interpolation data group to be mapped to the global coordinate system by an interpolation process for the plurality of local volume data.
The ultrasonic volume data processing apparatus, wherein the integrated volume data is constituted by the interpolation data group.
前記統合手段は、更に、前記グローバル座標系における同一アドレスに複数の補間データが与えられて競合状態が生じた場合に調停処理を実行する調停処理部を有する、ことを特徴とする超音波ボリュームデータ処理装置。 The apparatus of claim 3.
The integration unit further includes an arbitration processing unit that executes an arbitration process when a plurality of interpolation data is given to the same address in the global coordinate system and a race condition occurs. Processing equipment.
前記調停処理部は、前記競合状態にある複数の補間データに対して平均処理を適用する、ことを特徴とする超音波ボリュームデータ処理装置。 The apparatus of claim 4.
The ultrasonic volume data processing apparatus, wherein the arbitration processing unit applies an average process to the plurality of interpolation data in the competitive state.
前記調停処理部は、前記複数のローカルボリュームデータの取得順序に応じて、前記競合状態にある複数の補間データに対して重み付け平均処理を適用する、ことを特徴とする超音波ボリュームデータ処理装置。 The apparatus of claim 4.
The ultrasonic volume data processing apparatus, wherein the arbitration processing unit applies a weighted average process to the plurality of interpolation data in the competing state according to an acquisition order of the plurality of local volume data.
前記調停処理部は、前記競合状態にある複数の補間データの中から、最新のローカルボリュームデータから生成された最新の補間データを選択する、ことを特徴とする超音波ボリュームデータ処理装置。 The apparatus of claim 4.
The ultrasonic volume data processing apparatus, wherein the arbitration processing unit selects the latest interpolation data generated from the latest local volume data from the plurality of interpolation data in the competitive state.
前記補間処理部は、前記複数のローカルボリュームデータの取得順序で前記各ローカルボリュームデータに対して個別的に補間処理を適用し、これにより、2番目以降の各ローカルボリュームデータが取得される都度、前記統合ボリュームデータが更新され、
前記画像形成手段は、前記統合ボリュームデータの更新に応じて前記三次元画像を更新する、ことを特徴とする超音波ボリュームデータ処理装置。 The apparatus of claim 3.
The interpolation processing unit individually applies interpolation processing to each local volume data in the order of obtaining the plurality of local volume data, and thereby each second and subsequent local volume data is acquired, The integrated volume data is updated,
The ultrasonic volume data processing apparatus, wherein the image forming unit updates the three-dimensional image in accordance with the update of the integrated volume data.
前記補間処理部は、前記複数のローカルボリュームデータの取得が完結した後に前記補間処理を実行し、
前記補間処理部は、前記複数のローカルボリュームデータに跨って存在する参照データセットに基づいて前記グローバル座標系における注目座標に与える補間データを生成する機能を有する、ことを特徴とする超音波ボリュームデータ処理装置。 The apparatus of claim 3.
The interpolation processing unit executes the interpolation processing after the acquisition of the plurality of local volume data is completed,
The ultrasonic volume data, wherein the interpolation processing unit has a function of generating interpolation data to be given to a target coordinate in the global coordinate system based on a reference data set existing across the plurality of local volume data Processing equipment.
前記統合ボリュームデータは、1つのローカルボリュームデータ内に入りきらないサイズをもった大型組織を包含するサイズを有し、
前記三次元画像は前記大型組織を表す画像である、ことを特徴とする超音波ボリュームデータ処理装置。 The apparatus of claim 1.
The integrated volume data has a size including a large organization having a size that cannot fit within one local volume data,
The ultrasonic volume data processing apparatus, wherein the three-dimensional image is an image representing the large tissue.
前記大型組織は、胎児又は胎盤である、ことを特徴とする超音波ボリュームデータ処理装置。 The apparatus of claim 10.
The ultrasonic volume data processing apparatus, wherein the large tissue is a fetus or a placenta.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008159536A JP5182932B2 (en) | 2008-06-18 | 2008-06-18 | Ultrasonic volume data processor |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008159536A JP5182932B2 (en) | 2008-06-18 | 2008-06-18 | Ultrasonic volume data processor |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2010000142A true JP2010000142A (en) | 2010-01-07 |
| JP5182932B2 JP5182932B2 (en) | 2013-04-17 |
Family
ID=41582361
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008159536A Expired - Fee Related JP5182932B2 (en) | 2008-06-18 | 2008-06-18 | Ultrasonic volume data processor |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP5182932B2 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5177606B1 (en) * | 2012-10-25 | 2013-04-03 | 国立大学法人 岡山大学 | Three-dimensional ultrasonic image creation method and program |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006055506A (en) * | 2004-08-23 | 2006-03-02 | Toshiba Corp | Ultrasonic diagnostic apparatus and method for processing image |
| WO2006085571A1 (en) * | 2005-02-09 | 2006-08-17 | Hitachi Medical Corporation | Ultrasonographic device and ultrasonographic method |
-
2008
- 2008-06-18 JP JP2008159536A patent/JP5182932B2/en not_active Expired - Fee Related
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006055506A (en) * | 2004-08-23 | 2006-03-02 | Toshiba Corp | Ultrasonic diagnostic apparatus and method for processing image |
| WO2006085571A1 (en) * | 2005-02-09 | 2006-08-17 | Hitachi Medical Corporation | Ultrasonographic device and ultrasonographic method |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5177606B1 (en) * | 2012-10-25 | 2013-04-03 | 国立大学法人 岡山大学 | Three-dimensional ultrasonic image creation method and program |
| WO2014064905A1 (en) * | 2012-10-25 | 2014-05-01 | 国立大学法人 岡山大学 | Method for creating three-dimensional ultrasonic image, and program |
Also Published As
| Publication number | Publication date |
|---|---|
| JP5182932B2 (en) | 2013-04-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US6413219B1 (en) | Three-dimensional ultrasound data display using multiple cut planes | |
| EP3448264B1 (en) | 3d image compounding for ultrasound fetal imaging | |
| JP5462598B2 (en) | Ultrasound diagnostic system | |
| JP4847334B2 (en) | Ultrasonic imaging apparatus and projection image generation method | |
| JP2009535152A (en) | Extended volume ultrasonic data display and measurement method | |
| JP2009045252A (en) | Ultrasonic diagnostic apparatus | |
| JP2007289685A (en) | System and method for automatically acquiring ultrasonic imaging surface on basis of specific data of patient | |
| EP1795129B1 (en) | Apparatus and method for displaying an ultrasound image | |
| JP2013123582A (en) | Ultrasonic diagnostic apparatus and image display method | |
| JP5862571B2 (en) | Ultrasonic image generation apparatus and ultrasonic image generation method | |
| JP5766443B2 (en) | Ultrasound system and method for providing slice images | |
| JP2005152346A (en) | Ultrasonic diagnostic system | |
| JP4276595B2 (en) | Ultrasonic diagnostic equipment | |
| JP3263131B2 (en) | Ultrasound diagnostic equipment | |
| KR102321853B1 (en) | Method and system for enhanced visualization of moving structures with cross-plane ultrasound images | |
| JP2001157677A (en) | Ultrasonic diagnostic apparatus | |
| JP5630967B2 (en) | Image processing apparatus and control method thereof | |
| JP5182932B2 (en) | Ultrasonic volume data processor | |
| KR101300646B1 (en) | Apparatus and method for processing a 3-dimensional ultrasound image | |
| JP5331313B2 (en) | Ultrasonic diagnostic equipment | |
| JP2008289548A (en) | Ultrasonograph and diagnostic parameter measuring device | |
| JP5665304B2 (en) | Ultrasonic system and method for providing volume information of a periodically moving object | |
| WO2018079344A1 (en) | Ultrasound image processing device and program | |
| WO2015099835A1 (en) | System and method for displaying ultrasound images | |
| WO2020246151A1 (en) | Three-dimensional ultrasonic image generation device, method, and program |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A712 Effective date: 20100423 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110323 |
|
| RD03 | Notification of appointment of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7423 Effective date: 20110511 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20110512 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20120918 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121002 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20121127 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20121218 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130111 |
|
| R150 | Certificate of patent or registration of utility model |
Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20160125 Year of fee payment: 3 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313117 |
|
| S533 | Written request for registration of change of name |
Free format text: JAPANESE INTERMEDIATE CODE: R313533 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| LAPS | Cancellation because of no payment of annual fees |