JP2009196170A - Optical scanner, image forming apparatus, controlling method and program - Google Patents
Optical scanner, image forming apparatus, controlling method and program Download PDFInfo
- Publication number
- JP2009196170A JP2009196170A JP2008038919A JP2008038919A JP2009196170A JP 2009196170 A JP2009196170 A JP 2009196170A JP 2008038919 A JP2008038919 A JP 2008038919A JP 2008038919 A JP2008038919 A JP 2008038919A JP 2009196170 A JP2009196170 A JP 2009196170A
- Authority
- JP
- Japan
- Prior art keywords
- illuminance
- laser
- value
- image
- image carrier
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



















Landscapes
- Laser Beam Printer (AREA)
- Mechanical Optical Scanning Systems (AREA)
- Exposure Or Original Feeding In Electrophotography (AREA)
- Cleaning In Electrography (AREA)
- Control Or Security For Electrophotography (AREA)
- Facsimile Scanning Arrangements (AREA)
Abstract
Description
本発明は、レーザビームにより像担持体を走査する光学走査装置、画像形成装置、制御方法、及びプログラムに関する。 The present invention relates to an optical scanning apparatus that scans an image carrier with a laser beam, an image forming apparatus, a control method, and a program.
従来、原稿から読み取った画像データに応じたレーザビーム(以下レーザ)により感光ドラム上を走査して潜像を形成し、潜像を現像した可視像を用紙に転写することで画像形成を行う電子写真方式の画像形成装置がある。電子写真方式の画像形成装置では、原稿読取部の移動方向(または原稿の移動方向)に直交する主走査方向における感光ドラム上のレーザ量(像面照度分布)が異なる特性を有する場合がある。像面照度分布が異なる特性の画像形成装置の場合、レーザの光量を主走査方向で補正することにより感光ドラム上の像面照度分布が一定になるようにしている。 Conventionally, a latent image is formed by scanning a photosensitive drum with a laser beam (hereinafter referred to as a laser) corresponding to image data read from an original, and a visible image obtained by developing the latent image is transferred to a sheet to form an image. There is an electrophotographic image forming apparatus. In an electrophotographic image forming apparatus, the amount of laser (image surface illuminance distribution) on the photosensitive drum in the main scanning direction orthogonal to the moving direction (or moving direction of the original) of the original reading unit may have different characteristics. In the case of an image forming apparatus having different image plane illuminance distributions, the image plane illuminance distribution on the photosensitive drum is made constant by correcting the amount of laser light in the main scanning direction.
上記の関連技術としては以下のような技術が提案されている(例えば、特許文献1参照)。特許文献1記載の技術では、レーザを所定の発光強度にした状態で感光ドラムの像面照度を測定し、像面照度が最低の照度となる像高を求め、該像高での照度とそれ以外の像高での照度との差分を補正値とする。更に、レーザの所定の発光強度以外では、所定の発光強度に対する比率を前記補正値に乗算することにより像面照度分布を算出する。尚、像高とは、感光ドラムの長手方向における潜像の形成位置(レーザ照射位置)である。
しかしながら、上述した従来技術においては次のような課題がある。画像形成装置でレーザにより感光ドラムを走査する際のレーザ/光学特性においては、レーザの発光強度に対するFFP(ファーフィールドパターン)のばらつき、レーザの光軸のばらつきといった光学特性差を有している。例えば図10にレーザの発光強度に対するFFP(水平)プロポーションの変動を示す。レーザの発光強度の低下に伴い、FFPプロポーションが発光強度の変化量に相関性なく細ることが分かる。 However, the above-described conventional technique has the following problems. In the laser / optical characteristics when the photosensitive drum is scanned with a laser in the image forming apparatus, there are optical characteristic differences such as variations in FFP (far field pattern) with respect to the emission intensity of the laser and variations in the optical axis of the laser. For example, FIG. 10 shows the fluctuation of the FFP (horizontal) proportion with respect to the laser emission intensity. It can be seen that as the emission intensity of the laser decreases, the FFP proportion decreases without correlation to the amount of change in emission intensity.
図22は、100%光量設定時の像面照度分布測定結果を示す図である。図23は、図22の像高Aに対応する背景技術の補正値算出方法を用いた補正値と実際に必要な補正値との特性を示す図である。 FIG. 22 is a diagram showing the measurement result of the image plane illuminance distribution when 100% light intensity is set. FIG. 23 is a diagram illustrating characteristics of a correction value using the correction value calculation method of the background art corresponding to the image height A in FIG. 22 and a correction value actually necessary.
図22において、横軸が像高を示し、縦軸が照度を示す。水平方向の矢印で示すラインが100%光量設定時の最低照度であり、垂直方向の矢印で示す範囲が補正量である。また、図23において、横軸が光量設定値を示し、縦軸が補正値を示す。斜めの実線が100%光量の補正値に対して比率を乗じて算出した補正値特性(1次近似補正値)であり、垂直方向の矢印で示す範囲が実際に必要な補正値と1次近似補正値との差である。 In FIG. 22, the horizontal axis indicates the image height, and the vertical axis indicates the illuminance. The line indicated by the horizontal arrow is the minimum illuminance when the 100% light quantity is set, and the range indicated by the vertical arrow is the correction amount. In FIG. 23, the horizontal axis represents the light amount setting value, and the vertical axis represents the correction value. The oblique solid line is a correction value characteristic (primary approximation correction value) calculated by multiplying the correction value for the 100% light quantity by the ratio, and the range indicated by the vertical arrow indicates the actually required correction value and the primary approximation. This is the difference from the correction value.
感光ドラム上の像面照度分布が一定となるように補正を行う際に、図23に示すように実際に必要な補正値と1次近似補正値とに差が生じる。そのため、補正後の像面照度分布の補正残差(目標とする補正値からのずれ)が、レーザの発光強度によって大きくなる場合が発生する。即ち、従来技術では、感光ドラム上の像面照度分布が一定となるように補正を行う際の照度補正精度が充分でないという課題がある。 When the correction is performed so that the image plane illuminance distribution on the photosensitive drum is constant, as shown in FIG. 23, there is a difference between the actually required correction value and the primary approximate correction value. For this reason, the correction residual (deviation from the target correction value) of the corrected image plane illuminance distribution may increase depending on the emission intensity of the laser. That is, the prior art has a problem that the illuminance correction accuracy is not sufficient when correction is performed so that the image plane illuminance distribution on the photosensitive drum is constant.
本発明の目的は、感光ドラム上の像面照度分布が一定となるように補正を行う際の照度補正精度を向上させることを可能とした光学走査装置、画像形成装置、制御方法、及びプログラムを提供することにある。 An object of the present invention is to provide an optical scanning apparatus, an image forming apparatus, a control method, and a program capable of improving the illuminance correction accuracy when performing correction so that the image plane illuminance distribution on the photosensitive drum is constant. It is to provide.
上述の目的を達成するために、本発明は、レーザ発光手段により射出したレーザを像担持体に照射することで前記像担持体に潜像を形成する光学走査装置において、前記レーザ発光手段による前記像担持体に対する複数のレーザ照射位置におけるレーザの照度を測定する測定手段と、前記レーザ発光手段から射出するレーザにおける複数の光量設定値に対する、前記測定手段により測定された複数のレーザ照射位置の照度の測定値をn次近似したn次近似式(n≧2)を算出する第1の算出手段と、前記第1の算出手段により算出された前記n次近似式を用いて、前記測定手段により測定された前記像担持体に対する任意のレーザ照射位置の照度と、前記像担持体に対する少なくとも1つ以上の他のレーザ照射位置の照度との照度差を、前記複数の光量設定値について算出する第2の算出手段と、前記第2の算出手段により算出された照度差に基づいて、照度補正値を算出する第3の算出手段と、前記第3の算出手段により算出された照度補正値に基づいて、前記レーザ発光手段により射出するレーザの光量を制御する制御手段と、を備えることを特徴とする。 In order to achieve the above-mentioned object, the present invention provides an optical scanning apparatus for forming a latent image on the image carrier by irradiating the image carrier with a laser emitted by the laser light emitter, and the laser light emitter means Measuring means for measuring the illuminance of the laser at a plurality of laser irradiation positions on the image carrier, and the illuminance at the plurality of laser irradiation positions measured by the measuring means for a plurality of light quantity setting values in the laser emitted from the laser emitting means The first calculating means for calculating the n-th order approximation formula (n ≧ 2) obtained by n-order approximation of the measured value of n and the n-th order approximation formula calculated by the first calculating means, The illuminance difference between the measured illuminance at an arbitrary laser irradiation position on the image carrier and the illuminance at at least one other laser irradiation position on the image carrier is calculated as follows. Second calculating means for calculating a number of light quantity setting values, third calculating means for calculating an illuminance correction value based on the illuminance difference calculated by the second calculating means, and the third calculating means. Control means for controlling the amount of laser light emitted by the laser light emitting means based on the illuminance correction value calculated by the above.
上述の目的を達成するために、本発明は、レーザ発光手段により射出したレーザを像担持体に照射することで前記像担持体に潜像を形成する光学走査装置において、前記レーザ発光手段による前記像担持体に対する複数のレーザ照射位置におけるレーザの照度を測定する測定手段と、前記レーザ発光手段から射出するレーザにおける複数の光量設定値に対する、前記測定手段により測定された複数のレーザ照射位置の照度の測定値をn次近似したn次近似式(n≧2)を算出し、前記n次近似式を微分した式を算出する第1の算出手段と、前記第1の算出手段により算出された前記n次近似式を微分した式を用いて、前記測定手段により測定された前記像担持体に対する任意のレーザ照射位置の照度と、前記像担持体に対する少なくとも1つ以上の他のレーザ照射位置の照度との照度差を、前記複数の光量設定値について算出する第2の算出手段と、前記第2の算出手段により算出された照度差に基づいて、照度補正値を算出する第3の算出手段と、前記第3の算出手段により算出された照度補正値に基づいて、前記レーザ発光手段により射出するレーザの光量を制御する制御手段と、を備えることを特徴とする。 In order to achieve the above-mentioned object, the present invention provides an optical scanning apparatus for forming a latent image on the image carrier by irradiating the image carrier with a laser emitted by the laser light emitter, and the laser light emitter means Measuring means for measuring the illuminance of the laser at a plurality of laser irradiation positions on the image carrier, and the illuminance at the plurality of laser irradiation positions measured by the measuring means for a plurality of light quantity setting values in the laser emitted from the laser emitting means Calculated by an n-order approximation formula (n ≧ 2) obtained by n-order approximation of the measured value, and a first calculation means for calculating an expression obtained by differentiating the n-order approximation formula, and the first calculation means. The illuminance at an arbitrary laser irradiation position with respect to the image carrier measured by the measuring means using an expression obtained by differentiating the n-th order approximate expression, and at least one for the image carrier. An illuminance correction value based on the illuminance difference calculated by the second calculating means and the second calculating means for calculating the illuminance difference from the illuminance at the other laser irradiation position above with respect to the plurality of light amount setting values. And a control means for controlling the amount of laser light emitted by the laser light emitting means based on the illuminance correction value calculated by the third calculating means. To do.
本発明によれば、レーザにおける実際の各光量設定値に対する照度特性に適する照度補正値を算出することができ、算出した照度補正値を用いてレーザ光量を制御することが可能となる。これにより、像担持体の像面照度分布が一定となるように補正を行う際の照度補正精度を向上させることを可能となる。 According to the present invention, it is possible to calculate an illuminance correction value suitable for the illuminance characteristics for each actual light amount setting value in the laser, and to control the laser light amount using the calculated illuminance correction value. This makes it possible to improve the illuminance correction accuracy when performing correction so that the image plane illuminance distribution of the image carrier is constant.
以下、本発明の実施の形態を図面に基づいて説明する。 Hereinafter, embodiments of the present invention will be described with reference to the drawings.
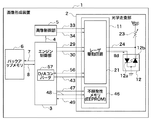
図1は、本発明の実施の形態に係る画像形成装置の主要部の構成を示すブロック図である。図2は、画像形成装置の光学走査部(光学走査装置)の構成を示す概略図である。 FIG. 1 is a block diagram showing a configuration of a main part of an image forming apparatus according to an embodiment of the present invention. FIG. 2 is a schematic diagram illustrating a configuration of an optical scanning unit (optical scanning device) of the image forming apparatus.
図1、図2において、画像形成装置1は、光学走査部2、エンジン制御部3、画像制御部5、バックアップメモリ6、ポリゴンミラー15、スキャナモータユニット16、f−θレンズ17、反射ミラー18、感光ドラム19、ビーム検出センサ20を備える。
1 and 2, the
光学走査部2は、レーザ駆動部11(第1の算出手段、第2の算出手段、第3の算出手段、補正手段、制御手段)、半導体レーザ12(レーザ発光手段)、コリメートレンズ13を有するレーザユニットを備える。レーザ駆動部11は、レーザ駆動回路21、不揮発性メモリ46を備える。エンジン制御部3は、D/Aコンバータ57を備える。尚、画像形成装置1の上記以外の構成(原稿読取部、現像部、転写部、定着部、搬送部等)の図示及び説明は省略する。
The
光学走査部2は、レーザにより感光ドラム19(像担持体)を走査することで感光ドラム19上に潜像を形成する。レーザ駆動部11のレーザ駆動回路21は、半導体レーザ12を駆動しレーザを射出させる。不揮発性メモリ46は、後述の照度補正値を格納する。エンジン制御部3は、光学走査部2を含む画像形成エンジンを制御する。画像制御部5は、エンジン制御部3の制御に基づき、後述の非反転データ信号33、反転データ信号34を光学走査部2に出力する。バックアップメモリ6は、バックアップ用のデータを記憶する。レーザ駆動部11等の詳細は図3により後述する。
The
まず、光学走査部2の動作を、感光ドラム19の非画像領域(レーザが照射されない領域)について説明する。光学走査部2のレーザユニット内の半導体レーザ12から射出されたレーザL1は、シリンドリカルレンズ14に入射し透過した後、ポリゴンミラー15に到達する。更に、レーザL1は、スキャナモータユニット16により等角速度で回転しているポリゴンミラー15により偏向され、f−θレンズ17により感光ドラム19の回転方向に直交する方向へ等速で走査するよう変換される。その後、レーザL1は、反射ミラー18により反射され、BDセンサ20に受光される。
First, the operation of the
次に、光学走査部2の動作を、感光ドラム19の画像領域(レーザが照射される領域)について説明する。光学走査部2のレーザユニット内の半導体レーザ12から射出されたレーザL2は、レーザL1と同様にf−θレンズ17を透過し、反射ミラー18により反射された後、感光ドラム19を照射する。これにより、感光ドラム19上に潜像が形成され、現像部(不図示)により潜像がトナーで現像される。その後、用紙にトナー像が転写され定着されることで画像形成が行われる。
Next, the operation of the
図3は、光学走査部2のレーザ駆動部11の詳細構成を示すブロック図である。
FIG. 3 is a block diagram illustrating a detailed configuration of the
図3において、レーザ駆動部11のレーザ駆動回路21は、半導体レーザ12の駆動電流を制御することにより、半導体レーザ12を所定光量(強度)で一定に発光させる。半導体レーザ12は、レーザダイオード(以下LD)12aと、このLD12aから出力されるレーザをモニタ(検出)するフォトダイオード(以下PD)12bから構成される。半導体レーザ12のPD12bは、LD12aから出力されるレーザの光量に応じたPD電流22を出力する。
In FIG. 3, the
光量調整可変抵抗23は、半導体レーザ12のLD12aが所定の光量で発光するように調整する抵抗である。半導体レーザ12のPD12bから出力される、レーザの光量に応じたPD電流22は、光量調整可変抵抗23により電圧変換され、PD電圧信号24として出力される。PD電圧信号24は、基準電圧発生回路(Vref)25により生成される基準電圧26と共に、サンプル/ホールド回路(光量制御回路:APC CTL)27に入力される。
The light amount adjusting
サンプル/ホールド回路27は、エンジン制御部3から入力されるサンプル/ホールド(以下S/H)制御信号29がサンプル要求を示している時は、PD電圧信号24と基準電圧26を比較する。PD電圧信号24が基準電圧26より低い場合は、ホールドコンデンサ51に充電が行われる。PD電圧信号24が基準電圧26より高い場合は、ホールドコンデンサ51から放電が行われる。このように、電流に応じた電圧値28を加減制御することにより半導体レーザ12のLD12aを所定光量とする。サンプル/ホールド回路27は、S/H制御信号29がホールド要求を示している時は、サンプル要求時に得られた結果に基づいた電流に応じた電圧値28を保持する。
The sample /
カレントミラー回路31は、トランジスタ31a、トランジスタ31bから構成される。ここで、例えばカレントミラー回路31のミラー比が約40倍であるとする。感光ドラム19に潜像を形成するデータ出力要求時は、エンジン制御部3から入力されるS/H制御信号29により、サンプル/ホールド回路27から出力される電流に応じた電圧値28がオペアンプ52のプラス入力端子に入力されている。そのため、トランジスタ53のエミッタから出力される電流が抵抗54を流れる。尚、抵抗54で発生する電圧値は、オペアンプ55を介してDAC基準信号56としてエンジン制御部3へ出力されている。
The
カレントミラー回路31のミラー比が約40倍であるため、カレントミラー回路31のトランジスタ31aのコレクタ側から出力される電流値であるレーザ駆動電流32は、抵抗54を流れる電流値の約40倍となる。
Since the mirror ratio of the
差動レシーバ(LVDS)35は、差動入力を有し、画像制御部5から入力される非反転データ(以下DATA)信号33、反転データ(以下/DATA)信号34を受信する。出力選択回路38は、S/H制御信号29またはデータ出力制御信号30により決定されたスイッチング信号a・39及びスイッチング信号b・40を出力する。
The differential receiver (LVDS) 35 has a differential input, and receives a non-inverted data (hereinafter DATA)
電流ドライバ41は、トランジスタ41a及びトランジスタ41bのエミッタ端子を接続した差動増幅の構成を有する。電流ドライバ41のトランジスタ41aは、スイッチング信号a・39に基づいて、レーザ駆動電流32により半導体レーザ12のLD12aをスイッチング駆動する。同様に、電流ドライバ41のトランジスタ41bは、スイッチング信号b・40に基づいて、レーザ駆動電流32により負荷抵抗42をスイッチング駆動する。
The current driver 41 has a differential amplification configuration in which the emitter terminals of the
レーザ駆動電流32は、半導体レーザ12のLD12aに全て流れるわけではない。エンジン制御部3から出力される補正データ電圧信号43がオペアンプ44のプラス入力端子に入力されるため、トランジスタ45のエミッタには補正データ電圧信号43と同じ電圧値が出力される。従って、レーザ駆動電流32は、トランジスタ45のエミッタに出力された前記電圧値と抵抗50とに基づき算出される電流分だけ低い電流値となるのである。
The laser drive current 32 does not all flow through the
ここで、上記の補正データ電圧信号43について説明する。レーザ駆動回路21は、抵抗54に発生する電圧値を、オペアンプ55を介してエンジン制御部3へDAC基準信号56として出力している。エンジン制御部3では、DAC基準信号56をD/Aコンバータ57に入力しD/Aコンバータ57の基準電圧とするので、0からDAC基準信号56までの電圧値を出力できるようになる。エンジン制御部3のD/A制御部から8bitのデータが所定タイミングで出力され、その8bitのデータに対応した電圧値がレーザ駆動回路21に出力される。この信号が補正データ電圧信号43である。
Here, the correction
バイアス電流決定部51は、半導体レーザ12のLD12aに対するバイアス電流値が変化しないよう、補正データ電圧信号43の値に応じて半導体レーザ12のLD12aへ電流を出力している。よって、補正データ電圧信号43により変化可能な半導体レーザ12のLD12aに通電する電流値の範囲は、図4に示す半導体レーザ12のLD12aの電流−光量特性(レーザI−L特性)の電流可変範囲(電流スイッチング最大範囲)となる。尚、図4で、α×Ithは電流可変範囲の下限値、Iopは電流可変範囲の上限値、(Iop−α×Ith)/2は電流可変範囲の中間値である。
The bias
次に、上記の抵抗50の抵抗値について説明する。カレントミラー回路31のミラー比が40倍である場合には、抵抗50の抵抗値は、抵抗54の抵抗値の1/40に設定する。抵抗50の抵抗値が、抵抗54の抵抗値の1/40にする理由を式を用いて説明する。各部の抵抗値、電流値、電圧値を以下のように設定する。
Next, the resistance value of the
抵抗50の抵抗値:R50。抵抗50に流れる電流値:I50。抵抗50に発生する電圧値:V50。抵抗54の抵抗値:R54。抵抗54に流れる電流値:I54。抵抗54に発生する電圧値:V54。バイアス電流決定部51から流れる電流値:Ib。カレントミラー回路31のミラー比:40倍。半導体レーザ12のLD12aへ流れる電流値:Ild。上記の抵抗値、電流値、電圧値との間には、下記の式が成立する。
Resistance value of the resistor 50: R50. Current value flowing through the resistor 50: I50. Voltage value generated in the resistor 50: V50. Resistance value of the resistor 54: R54. Current value flowing through the resistor 54: I54. Voltage value generated in the resistor 54: V54. Current value flowing from the bias current determination unit 51: Ib. Mirror ratio of current mirror circuit 31: 40 times. The value of current flowing to the
I54 = V54/R54
Ild = 40×V54/R54+Ib
レーザ駆動回路21に補正データ電圧信号43を入力し、半導体レーザ12のLD12aに流す電流として図4のα×Ithまで電流を減少させたい場合、エンジン制御部3でD/A制御部からD/Aコンバータ57へ出力する8bitの設定値はFFhとする。その場合にD/Aコンバータ57から出力される補正データ電圧信号43は、抵抗54に発生する電圧値であるV54と等しい。抵抗50に流れる電流値I50は下記の式で表される。
I54 = V54 / R54
Ild = 40 × V54 / R54 + Ib
When the correction
I50 = V50/R50 = 40×V54/R54
エンジン制御部3でD/A制御部からD/Aコンバータ57へ出力する8bitの設定値をFFhとした時の補正データ電圧信号43と、抵抗50に発生する電圧値V50とが等しいことを考慮すると、抵抗50の抵抗値R50は下記の式で表される。
I50 = V50 / R50 = 40 × V54 / R54
Consider that the correction
R50 = R54/40
これにより、抵抗50の抵抗値が、抵抗54の抵抗値の1/40とする必要があることが分かる。
R50 = R54 / 40
This shows that the resistance value of the
レーザ駆動部11の不揮発性メモリ(以下EEPROM)46には、補正データ電圧信号43を生成するためのデータが格納されている。エンジン制御部3は、レーザ駆動部11のEEPROM46と通信を行い、EEPROM46に格納されたデータをシリアルデータ出力信号(DO)49を経由して読み出す。
Data for generating the correction
図5は、画像形成装置の画像形成時におけるレーザ駆動部11のレーザ駆動回路21の状態遷移を示すタイムチャートである。
FIG. 5 is a time chart showing the state transition of the
図5において、レーザ駆動回路21の動作は、BDセンサ20の出力信号の立ち下がりエッジを基準に以下の順でシーケンシャルに制御される。光量制御(APC)→レーザ強制消灯(OFF)→データ出力(DATA OUT)→レーザ強制消灯(OFF)→光量制御(APC)。出力選択回路38の出力状態は、データ出力、停止、強制出力、停止、データ出力、停止、強制出力、停止、データ出力・・・となっている。
In FIG. 5, the operation of the
サンプル/ホールド回路27の動作状態は、ホールド、サンプル、ホールド、サンプル、ホールド・・・となっている。レーザ駆動回路21の動作状態は、DATA OUT(データ出力)、OFF(レーザ強制消灯)、APC(光量制御)、OFF、DATA OUT、OFF、APC、OFF、DATA OUT・・・となっている。画像制御部5からレーザ駆動部11のレーザ駆動回路21に出力されるデータは、印刷対象の用紙の印字範囲となる感光ドラム19の画像領域(レーザ照射領域)に形成される潜像に対応する。
The operation state of the sample /
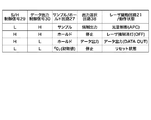
図6は、レーザ駆動回路21の動作機能表を示す図である。
FIG. 6 is a diagram showing an operation function table of the
図6において、S/H制御信号29がL、データ出力制御信号30がH、サンプル/ホールド回路27がサンプル状態、出力選択回路38が強制出力状態の時は、レーザ駆動回路21は光量制御(APC)状態となる。また、S/H制御信号29がH、データ出力制御信号30がH、サンプル/ホールド回路27がホールド状態、出力選択回路38が停止状態の時は、レーザ駆動回路21はレーザ強制消灯(OFF)状態となる。
In FIG. 6, when the S /
また、S/H制御信号29がH、データ出力制御信号30がL、サンプル/ホールド回路27がホールド状態、出力選択回路38がデータ出力状態の時は、レーザ駆動回路21はデータ出力(DATA OUT)状態となる。また、S/H制御信号29がL、データ出力制御信号30がL、サンプル/ホールド回路27が0(初期値)状態、出力選択回路38が停止状態の時は、レーザ駆動回路21はリセット状態となる。
When the S /
次に、レーザ駆動部11のレーザ駆動回路21の動作を、光量制御(APC)、レーザ強制消灯(OFF)、データ出力(DATA OUT)、リセット状態の順で説明する。
Next, the operation of the
「光量制御(APC)」
レーザ駆動回路21において、サンプル/ホールド回路27がサンプル状態の場合、出力選択回路38は次の制御を行う。出力選択回路38は、レシーバ非反転出力信号36、レシーバ反転出力信号37の出力の如何によらず、半導体レーザ12のLD12aが発光するよう強制的にONデータを出力する。レーザ駆動回路21は、PD電圧信号24と基準電圧26との差分に応じた信号により、半導体レーザ12のLD12aの発光光量を所定光量とする制御を行う。即ち、以下のようにPD電圧信号24と基準電圧26との大小関係に応じた制御を行う。
"Light control (APC)"
In the
PD電圧信号24>基準電圧26の場合:レーザ駆動回路21は、半導体レーザ12のLD12aの発光光量が所定光量より大きいと判断し、ホールドコンデンサ51の電荷を放電する。これにより、電流に応じた電圧値28を低下させ、レーザ駆動電流32を減少させることで、半導体レーザ12のLD12aの発光光量を低下させる。
When
PD電圧信号24<基準電圧26の場合:レーザ駆動回路21は、半導体レーザ12のLD12aの発光光量が所定光量より小さいと判断し、ホールドコンデンサ51に電荷を充電する。これにより、電流に応じた電圧値28を増加させ、レーザ駆動電流32を増加させることで、半導体レーザ12のLD12aの発光光量を上昇させる。
When
PD電圧信号24=基準電圧26の場合:レーザ駆動回路21は、半導体レーザ12のLD12aの発光光量が所定光量と同一である判断し、ホールドコンデンサ51の電荷を充放電しない。これにより、電流に応じた電圧値28とレーザ駆動電流32は共に増加も減少もしない。
When
「レーザ強制消灯(OFF)」
サンプル/ホールド回路27は、設定された電流に応じた電圧値28を保持する。出力選択回路38は、レシーバ非反転出力信号36、レシーバ反転出力信号37の出力の如何によらず、半導体レーザ12のLD12aが消灯するよう強制的にOFFデータを出力する。
“Laser forced extinction (OFF)”
The sample /
「データ出力(DATA OUT)」
サンプル/ホールド回路27にて設定された電流に応じた電圧値28に基づき、出力選択回路38は、レシーバ非反転出力信号36、レシーバ反転出力信号37に応じた信号を出力する。これにより、半導体レーザ12のLD12aもしくは抵抗42に電流を流す。
"Data output (DATA OUT)"
Based on the
「リセット状態」
レーザ駆動回路21はリセット状態となり、サンプル/ホールド回路27は、設定された電流値を初期化する。且つ、出力選択回路38は、半導体レーザ12のLD12aが消灯するよう強制的にOFFデータを出力する。
"Reset state"
The
次に、本実施の形態の画像形成装置において、3種類のレーザ光量に対する像面照度データから照度補正値を生成する処理について、(1)光量調整、(2)像面照度測定、(3)補正前近似式の算出、(4)補正値算出、(5)補正値格納、の順で説明する。 Next, in the image forming apparatus of the present embodiment, (1) light amount adjustment, (2) image surface illuminance measurement, and (3) processing for generating illuminance correction values from image surface illuminance data for three types of laser light amounts. Description will be made in the order of calculation of the approximate expression before correction, (4) correction value calculation, and (5) correction value storage.
図7は、画像形成装置の像面照度測定部61の構成を示す概略図である。
FIG. 7 is a schematic diagram illustrating a configuration of the image plane
図7において、像面照度測定部61(測定手段)は、光学ユニット62、測定用フォトダイオード(以下APD)63、光学駆動部64から構成される。APD63は、アバランシェ・フォトダイオード(APD)として構成されると共に光学ユニット62の上面に固定されており、感光ドラム19のレーザ照射位置に相当する箇所に配置される。光学駆動部64は、光学ユニット62を矢印で示す主走査方向(感光ドラム19の回転方向に対し直交する方向)に駆動する。尚、像面照度測定に使用する光学走査部2のレーザユニット内の半導体レーザ12のLD12aから射出するレーザL2は、走査光或いは静止光の何れでもよい。
In FIG. 7, the image plane illuminance measurement unit 61 (measurement means) includes an
照度測定用制御ユニット66は、APD制御部67、A/D(アナログ/デジタル)変換器69、電流制御部71から構成される。APD制御部67は、測定用フォトダイオード制御信号線65を介してAPD63に接続されており、APD63に電源を供給すると共に、APD63から出力される電流を電圧信号に変換する。A/D変換器69は、APD制御部67から出力されるAPD電圧信号68を所定のサンプリングレート及び分解能により量子化する。
The illuminance
電流制御部71は、半導体レーザ12のLD12aを所定の光量となるように、レーザ駆動回路制御信号線72を介してレーザ駆動11のレーザ駆動回路21を制御する。レーザ駆動回路制御信号線72を流れる信号は、S/H制御信号29、データ出力(DATA OUT)制御信号30、及び補正データ電圧信号43から構成される。半導体レーザ12のLD12aを所定の光量とする設定値を補正データ電圧信号43によりレーザ駆動回路21へ転送する。像面照度測定部61における制御方法は、感光ドラム19を用いた画像形成時の制御方法と同一のため説明は省略する。
The
(1)光量調整
まず、感光ドラム19の画像領域(レーザ照射領域)における長手方向の一方の端部から他方の端部に対応する画像領域内像高(±150mm)を等間隔(25mm)に分割した計13箇所の位置について、像面照度測定部61により像面照度を測定する。尚、本実施の形態では像高の各位置の間隔を等間隔とする場合を例に挙げているが、等間隔に限定されるものではなく非等間隔としてもよい。
(1) Light quantity adjustment First, the image height (± 150 mm) in the image area corresponding to the other end from the one end in the longitudinal direction in the image area (laser irradiation area) of the
上記の13箇所の像高での照度を測定し、最低照度となる像高を検出し、その像高での照度が所定値となるようレーザ駆動回路21を光量調整モードにし、光量調整可変抵抗23により光量を調整する。以上により得られた光量を100%光量と定義し、この時に設定されるレーザ駆動電流32を100%光量駆動電流とする。尚、エンジン制御部3でD/A制御部からD/Aコンバータ57へ出力する8bitデータは00hである。
The illuminance at the image heights at the 13 positions is measured, the image height that is the minimum illuminance is detected, and the
(2)像面照度測定(3種類の光量)
次に、複数のレーザ量(3種類の光量)に対する像面照度分布(感光ドラム上のレーザ光量)を測定する。調整された半導体レーザ12における出力可能なレーザの最大光量100%に対して光量設定値(D/A値)を75%、50%、25%相当に設定し、像面照度測定部61により像面照度を測定する。100%光量駆動電流を3/4倍、1/2倍、1/4倍(図4の電流可変範囲の3/4倍、1/2倍、1/4倍)にするために、次の設定を行う。エンジン制御部3でD/A制御部からD/Aコンバータ57へ出力する8bitデータは、40h、80h、C0hを設定する。
(2) Image surface illuminance measurement (3 types of light intensity)
Next, the image plane illuminance distribution (laser light amount on the photosensitive drum) with respect to a plurality of laser amounts (three kinds of light amounts) is measured. The light amount setting value (D / A value) is set to 75%, 50%, or 25% with respect to the maximum
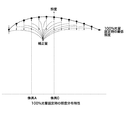
上記の設定を行った状態で、像面照度測定部61の光学駆動部64により光学ユニット62のAPD63を移動し、複数箇所(13箇所)の像高における像面照度を測定する。3種類の光量に対する像面照度測定を実施し、測定結果をグラフ化したものを図8に示す(横軸:像高、縦軸:光量)。図8では、75%光量設定時、50%光量設定時、25%光量設定時のそれぞれの照度分布特性を示している。
In the state where the above setting is performed, the
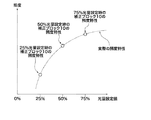
また、その測定結果を像高−25(補正ブロック10)について横軸を光量設定値とし縦軸を照度としてグラフ化したものを図9に示す(横軸:光量設定値、縦軸:照度)。図9では、75%光量設定時、50%光量設定時、25%光量設定時の補正ブロック10のそれぞれの照度特性を示しており、破線は実際の照度特性を示している。
FIG. 9 is a graph showing the measurement results of the image height of −25 (correction block 10) with the horizontal axis representing the light amount setting value and the vertical axis representing the illuminance (horizontal axis: light amount setting value, vertical axis: illuminance). . FIG. 9 shows the illuminance characteristics of the
光量設定値(D/A値)を40h、80h、C0h(75%光量設定、50%光量設定、25%光量設定)とリニアにしたにも関わらず、図9のような非線形特性となる理由は次の通りである。レーザ/光学特性において、発光強度に対するFFPのばらつき、光軸のばらつきといった光学特性差を有しているためである。 The reason why the non-linear characteristic is as shown in FIG. 9 even though the light amount setting value (D / A value) is linear with 40h, 80h, C0h (75% light amount setting, 50% light amount setting, 25% light amount setting). Is as follows. This is because the laser / optical characteristics have optical characteristic differences such as FFP variations and optical axis variations with respect to emission intensity.
レーザの発光強度に対するFFP(水平)プロポーションの変動を図10に示す。図10では、100%発光時、75%発光時、50%発光時、25%発光時のそれぞれのFFPプロポーションを示している。図10に示すように、レーザの発光強度の低下に伴い、FFPプロポーションが発光強度の変化量に相関性なく細ることが分かる。その影響により、光量設定値をリニアに変化させても光量はリニアに変動しない現象や、像面照度分布のプロファイルが光量により変動する現象などが発生する。 FIG. 10 shows the variation of the FFP (horizontal) proportion with respect to the laser emission intensity. FIG. 10 shows the FFP proportions at 100% emission, 75% emission, 50% emission, and 25% emission. As shown in FIG. 10, it can be seen that the FFP proportion decreases with no correlation to the amount of change in emission intensity as the emission intensity of the laser decreases. As a result, a phenomenon in which the light quantity does not change linearly even when the light quantity setting value is changed linearly, a phenomenon in which the profile of the image plane illuminance distribution fluctuates depending on the light quantity, or the like occurs.
(3)補正前近似式の算出
次に、それぞれの光量設定値に対する補正前像面照度データの近似式の算出を行う。エンジン制御部3のD/Aコンバータ57の設定値を40h、80h、C0hとし、像面照度測定で得られる13箇所の像高における像面照度の測定値から4次近似式(n次近似式(n≧2))を生成する。以上の3種類の光量に対する像面照度測定を実施し、それぞれの光量に対する像面照度の測定値を4次近似したグラフを図11に示す(横軸:像高、縦軸:光量)。図11では、75%光量設定時、50%光量設定時、25%光量設定時のそれぞれの照度分布より近似された4次近似曲線と最低照度を示している。
(3) Calculation of approximate expression before correction Next, an approximate expression of image surface illuminance data before correction for each light quantity setting value is calculated. A set value of the D /
(4)補正値算出
次に、補正値算出(図11参照)の方法について説明する。画像領域内像高(±150mm)を12.5mm等間隔で計25の補正ブロックで照度補正値(以下補正値)の算出を行うこととする。図11に示すように4次近似式から、最低照度となる補正ブロックに対する他の24の補正ブロックの像面照度差(ΔP0H〜ΔP23H、ΔP0M〜ΔP23M、ΔP0L〜ΔP23L)を、それぞれの光量設定値(75%、50%、25%)について算出する。
(4) Correction Value Calculation Next, a correction value calculation (see FIG. 11) method will be described. It is assumed that the illuminance correction value (hereinafter referred to as correction value) is calculated with a total of 25 correction blocks at regular intervals of 12.5 mm for the image height in the image area (± 150 mm). As shown in FIG. 11, from the fourth-order approximation, the image plane illuminance differences (ΔP0H to ΔP23H, ΔP0M to ΔP23M, ΔP0L to ΔP23L) of the other 24 correction blocks with respect to the correction block having the lowest illuminance are set as the respective light amount setting values. (75%, 50%, 25%) are calculated.
図11のそれぞれの光量設定値(75%、50%、25%)に対する25の補正ブロックの像面照度差データを図12に示す。図12では、75%光量設定値(D/A値 40h)、50%光量設定値(D/A値 80h)、25%光量設定値(D/A値 C0h)のそれぞれの像面照度差データ(単位:μW)を示している。また、図12で、補正ブロック0〜24の各々に対応付けられた像高−150〜150は、感光ドラム19の画像領域(レーザ照射領域)における長手方向の一方の端部から他方の端部に対応する。
FIG. 12 shows image plane illuminance difference data of 25 correction blocks with respect to the respective light amount setting values (75%, 50%, 25%) in FIG. In FIG. 12, the image plane illuminance difference data of 75% light intensity setting value (D / A
また、図11のそれぞれの光量設定値に対する4次近似式から、25の補正ブロックの像面照度データを算出する。図11のそれぞれの光量設定値(75%、50%、25%)に対する25の補正ブロックの4次近似式から算出した像面照度データを図13に示す。図13では、75%光量設定値(D/A値 40h)、50%光量設定値(D/A値 80h)、25%光量設定値(D/A値 C0h)のそれぞれの像面照度データ(単位:μW)を示している。
Further, the image plane illuminance data of 25 correction blocks is calculated from the fourth-order approximation formula for each light quantity setting value in FIG. FIG. 13 shows image plane illuminance data calculated from the fourth-order approximation formula of 25 correction blocks for the respective light quantity setting values (75%, 50%, 25%) in FIG. In FIG. 13, image plane illuminance data (75% light intensity setting value (D / A
図11における補正ブロック10の像面照度差(ΔP10H、ΔP10M、ΔP10L)と像面照度データ(PH10、PM10、PL10)を用いて補正値の算出方法を説明する。
A correction value calculation method will be described using the image plane illuminance differences (ΔP10H, ΔP10M, ΔP10L) and the image plane illuminance data (PH10, PM10, PL10) of the
最初に、エンジン制御部3のD/Aコンバータ57の設定値40h(75%相当光量設定値)の補正値C10Hの算出方法を説明する。エンジン制御部3のD/Aコンバータ57の設定値40hの時の補正ブロック10の像面照度差ΔP10Hは、図12より26.4μW(設定値40hの時の像高−25の光量から像高150の光量を差し引いた値)である。像面照度データPH10は、図13より176.8μWである。
First, a method of calculating the correction value C10H of the
D/Aコンバータ57の設定値40h(75%相当光量設定値)の像面照度データPH10と、D/Aコンバータ57の設定値80h(50%相当光量設定値)の像面照度データPM10から、光量変化量P1LSBHを算出する。光量変化量P1LSBHは、D/A値が1h変化した時の第1の光量変化の傾きである。
From the image plane illuminance data PH10 of the
像面照度データPH10とPM10の光量設定値の差は40h(decimal(以下dec)値で64)であるので、計算式は、
P1LSBH =(PH10−PM10)/64
=(176.8−117.5)/64 = 0.927
となる。
Since the difference between the light amount setting values of the image plane illuminance data PH10 and PM10 is 40h (decimal (hereinafter, dec) value is 64), the calculation formula is
P1LSBH = (PH10-PM10) / 64
= (176.8-117.5) / 64 = 0.927
It becomes.
補正ブロック10の補正値C10Hは、像面照度差ΔP10HとD/A値が1h変化した時の光量変化量P1LSBHとから算出される。計算式は、
C10H = ΔP10H/P1LSBH
= 26.4/0.927 = 28.4 ≒ 28
となる。実際の補正ブロック10の補正値C10Hは“1Ch”となる。
The correction value C10H of the
C10H = ΔP10H / P1LSBH
= 26.4 / 0.927 = 28.4 ≒ 28
It becomes. The actual correction value C10H of the
次に、エンジン制御部3のD/Aコンバータ57の設定値C0h(25%相当光量設定値)の補正値C10Lの算出方法を説明する。D/Aコンバータ57の設定値C0hの時の補正ブロック10の像面照度差ΔP10Lは、図12より7.2μW(設定値40hの時の像高−25の光量から像高150の光量を差し引いた値)である。像面照度データPL10は、図13より47.8μWである。
Next, a method of calculating the correction value C10L of the set value C0h (25% equivalent light amount set value) of the D /
D/Aコンバータ57の設定値C0h(25%相当光量設定値)の像面照度データPL10と、D/Aコンバータ57の設定値80h(50%相当光量設定値)の像面照度データPM10から、光量変化量P1LSBLを算出する。光量変化量P1LSBLは、D/A値が1h変化した時の第2の光量変化の傾きである。
From the image plane illuminance data PL10 of the set value C0h (25% equivalent light amount set value) of the D /
像面照度データPL10とPM10の光量設定値の差は40h(dec値で64)であるので、計算式は、
P1LSBL = (PM10−PL10)/64
= (117.5−47.8)/64 = 1.089
となる。
Since the difference between the light intensity setting values of the image plane illuminance data PL10 and PM10 is 40h (dec value is 64), the calculation formula is
P1LSBL = (PM10-PL10) / 64
= (117.5-47.8) / 64 = 1.089
It becomes.
補正ブロック10の補正値C10Lは、像面照度差ΔP10LとD/A値が1h変化した時の光量変化量P1LSBLとから算出される。計算式は、
C10L = ΔP10L/P1LSBL
= 7.2/1.089 = 6.6 ≒ 7
となる。実際の補正ブロック10の補正値C10Lは“07h”となる。
The correction value C10L of the
C10L = ΔP10L / P1LSBL
= 7.2 / 1.089 = 6.6 ≒ 7
It becomes. The actual correction value C10L of the
次に、エンジン制御部3のD/Aコンバータ57の設定値80h(50%相当光量設定値)の補正値C10Mの算出方法を説明する。D/Aコンバータ57の設定値80hの時の補正ブロック10の像面照度差ΔP10Mは、図12より17.7μW(設定値40hの時の像高−25の光量から像高150の光量を差し引いた値)である。
Next, a method of calculating the correction value C10M of the
D/Aコンバータ57の設定値80hの時、補正値C10Mを算出する際のD/A値が1h変化した時の光量変化量P1LSBMを算出する。算出する際に用いる値は、光量変化量P1LSBHと光量変化量P1LSBLである。これらの値を用いてD/Aコンバータ57の設定値80hの時のD/A値が1h変化した時の光量変化量P1LSBMを算出する。計算式は、
P1LSBM = (P1LSBH+P1LSBL)/2
= (0.927+1.089)/2 = 1.008
とし、光量変化量P1LSBHと光量変化量P1LSBLの平均とする。
When the setting
P1LSBM = (P1LSBH + P1LSBL) / 2
= (0.927 + 1.089) / 2 = 1.008
And the average of the light quantity change amount P1LSBH and the light quantity change amount P1LSBL.
補正ブロック10の補正値C10Mは、像面照度差とD/A値が1h変化した時の光量変化量P1LSBLとから算出される。計算式は、
C10L = ΔP10L/P1LSBL
= 17.7/1.008 = 17.5 ≒ 18
となる。実際の補正ブロック10の補正値C10Lは“12h”となる。
The correction value C10M of the
C10L = ΔP10L / P1LSBL
= 17.7 / 1.008 = 17.5 ≒ 18
It becomes. The actual correction value C10L of the
以上のように算出された3つの補正値を用いてレーザの1走査の光量を主走査方向で補正することにより、感光ドラム19上の像面照度分布が一定になるようにしている。例えば、補正ブロック10の40h設定時のD/A値は、
40h+1Ch = 5Ch
となる。また、80h設定時及びC0h設定時も同様に、
80h+12h = 92h
C0h+07h = C7h
となる。
By correcting the light quantity of one scanning of the laser in the main scanning direction using the three correction values calculated as described above, the image plane illuminance distribution on the
40h + 1Ch = 5Ch
It becomes. Similarly, when setting 80h and setting C0h,
It becomes.
補正ブロック10の光量設定として40h、80h、C0h設定時以外の補正値は、40h、80h、C0h設定時の補正値を、横軸をD/A設定値とし縦軸を補正値としたグラフにプロットし、それぞれを結んだ直線上の値とする。例えば、補正ブロック10の40hと80hの間の60h設定時の補正値は、40h設定時の補正値と80h設定時の補正値を結ぶ直線の式を考える。
The correction values other than those when 40h, 80h and C0h are set as the light intensity setting of the
Bを補正値としAをD/A設定値として10進数で考えると、D/A設定値が40hの時の(A、B)座標は(64、28)であり、80hの時の(A、B)座標は(128、18)である。従って、式は、
B = −5/32A+38
となる。60h設定時の補正値は、Aに96を代入すると、
B = 23 = 17h
となる。よって、60h設定時のD/A設定値は、
60h+17h = 77h
となる。
Considering a decimal value with B as a correction value and A as a D / A set value, the (A, B) coordinates when the D / A set value is 40h are (64, 28), and (A , B) The coordinates are (128, 18). Therefore, the formula is
B = −5 / 32A + 38
It becomes. The correction value at the time of setting 60h is 96 when A is substituted.
B = 23 = 17h
It becomes. Therefore, the D / A setting value at 60h setting is
It becomes.
(5)補正値格納
上記(1)〜(4)で算出された各光量設定値(00h、20h、40h、60h、80h、A0h、C0h、E0h)及び各補正ブロック(補正ブロック0〜24)に対する補正値を、エンジン制御部3においてD/A制御部からD/Aコンバータ57に入力する。これにより、補正が実行される。エンジン制御部3で以上の処理により得られた補正データは、シリアルデータ入力信号(DI)48を経由してレーザ駆動部11のEEPROM46に格納する。
(5) Correction value storage Each light quantity setting value (00h, 20h, 40h, 60h, 80h, A0h, C0h, E0h) calculated in the above (1) to (4) and each correction block (correction blocks 0 to 24) A correction value is input to the D /
上記のように3種類の光量における照度分布測定を実施した際に得られる補正ブロック10の光量設定値と照度との関係は、図9に丸印で示す75%、50%、25%光量設定時の照度特性となるが、実際には破線で示す照度特性となるのである。
As described above, the relationship between the light intensity setting value of the
従来例にて算出された図9の照度特性に対する補正値は、図14に示すように光量設定値と補正値との関係を示す特性における75%、50%、25%光量設定時の補正値とそれらを結ぶ直線上の値となる。しかし、図9の破線の照度特性に対する補正値は図14の破線上の補正値でないと、レーザの光量設定値によっては補正残差が大きくなる場合が発生する。 The correction values for the illuminance characteristics shown in FIG. 9 calculated in the conventional example are correction values at the time of setting 75%, 50%, and 25% light quantities in the characteristics indicating the relationship between the light quantity setting values and the correction values as shown in FIG. And the value on the straight line connecting them. However, if the correction value for the illuminance characteristic indicated by the broken line in FIG. 9 is not the correction value on the broken line in FIG. 14, the correction residual may increase depending on the light amount setting value of the laser.
次に、本実施の形態の画像形成装置において、8種類の像面照度データから照度補正値を生成する処理について、(1)光量調整、(2)像面照度測定、(3)補正前近似式の算出、(4)補正値算出、(5)補正値格納、の順で説明する。即ち、補正の精度を向上させるための2次近似式を用いた補正値算出方法を以下に説明する。 Next, in the image forming apparatus according to the present embodiment, the processing for generating an illuminance correction value from eight types of image plane illuminance data includes (1) light amount adjustment, (2) image plane illuminance measurement, and (3) approximation before correction. The calculation will be described in the order of calculating the equation, (4) calculating the correction value, and (5) storing the correction value. That is, a correction value calculation method using a quadratic approximate expression for improving the correction accuracy will be described below.
補正データを生成する際の仕様は以下の表に示す通りである。 The specifications for generating the correction data are as shown in the following table.

(1)光量調整
上述した3種類の光量に対する像面照度データから照度補正値を生成する場合の方法と同様に調整を行う。
(1) Light quantity adjustment Adjustment is performed in the same manner as in the case of generating an illuminance correction value from the image plane illuminance data for the three types of light quantities described above.
(2)像面照度測定(8種類の光量)
まず、エンジン制御部3のD/Aコンバータ57の設定値を40hにした時の像面照度測定(75%相当光量設定値)について説明する。100%光量駆動電流を3/4(図4の電流可変範囲の3/4)にするために、エンジン制御部3でD/A制御部からD/Aコンバータ57へ出力する8bitデータは40hを設定する。その状態で、光学駆動部64により光学ユニット62上のAPD63を上記仕様に則って移動し、13箇所の像高における像面照度を測定する。
(2) Image surface illuminance measurement (8 types of light intensity)
First, image plane illuminance measurement (75% equivalent light amount setting value) when the setting value of the D /
次に、エンジン制御部3のD/Aコンバータ57の設定値を80hにした時の像面照度測定(50%相当光量設定値)について説明する。100%光量駆動電流を1/2(図4の電流可変範囲の1/2)にするために、エンジン制御部3でD/A制御部からD/Aコンバータ57へ出力する8bitのデータを80hに設定した時の補正データ電圧信号43を駆動回路21に入力する。尚、補正データ電圧信号43はDAC基準信号56の1/2である。その状態で、75%光量の像面照度測定と同様に像面照度を測定する。
Next, image plane illuminance measurement (50% equivalent light amount setting value) when the setting value of the D /
次に、エンジン制御部3のD/Aコンバータ57の設定値をC0hにした時の像面照度測定(25%相当光量設定値)について説明する。100%光量駆動電流を1/4(図4の電流可変範囲の1/4)にするために、エンジン制御部3でD/A制御部からD/Aコンバータ57へ出力する8bitのデータをC0hに設定した時の補正データ電圧信号43を駆動回路21に入力する。その状態で、75%光量の像面照度測定と同様に像面照度を測定する。
Next, image plane illuminance measurement (25% equivalent light amount setting value) when the setting value of the D /
エンジン制御部3のD/Aコンバータ57のその他の設定値に関する像面照度測定についても同様に、それぞれ00h、20h、60h、A0h、E0hと設定し、像面照度を測定する。以上の8種類の光量に対する像面照度測定を実施し、その測定結果をグラフ化したものを図15に示す(横軸:像高、縦軸:光量)。図15では、100%、87.5%、75%、62.5%、50%、37.5%、25%、12.5%光量設定時の照度分布特性を示している。
Similarly, the image plane illuminance measurement for other set values of the D /
(3)補正前近似式の算出
エンジン制御部3のD/Aコンバータ57の設定値を00h、20h、40h、60h、80h、A0h、C0h、E0hとし、像面照度測定で得られる図15に示す13箇所の像高における像面照度の測定値から4次近似式を生成する。以上の8種類の光量に対する像面照度測定を実施し、それぞれの光量に対する像面照度の測定値を4次近似したグラフを図16に示す(横軸:像高、縦軸:光量)。図16では、100%、87.5%、75%、62.5%、50%、37.5%、25%、12.5%光量設定時の照度分布より近似された4次近似曲線と最低照度を示している。
(3) Calculation of approximate expression before correction The set values of the D /
(4)補正値算出(図16参照)
例えば、画像領域内像高(±150mm)を12.5mm等間隔で計25の補正ブロックについて照度補正値(以下補正値)の算出を行う。像高に対する補正ブロックの配置方法は像面照度測定時の像高と一致しなくともよい。図16に示すように、4次近似式から、最低照度となる補正ブロックに対する他の24の補正ブロックの像面照度差をそれぞれの光量設定値について図11の場合と同様に算出する。
(4) Correction value calculation (see FIG. 16)
For example, an illuminance correction value (hereinafter referred to as a correction value) is calculated for a total of 25 correction blocks at an image area in-image height (± 150 mm) at equal intervals of 12.5 mm. The arrangement method of the correction block with respect to the image height may not coincide with the image height at the time of image plane illuminance measurement. As shown in FIG. 16, the image plane illuminance difference of the other 24 correction blocks with respect to the correction block having the lowest illuminance is calculated from the fourth-order approximation formula in the same manner as in FIG.
それぞれの光量設定値(100%、87.5%、75%、62.5%、50%、37.5%、25%、12.5%)についての25の補正ブロックの像面照度差データを図17に示す。図17では、100%光量設定値(D/A値 00h)〜12.5%光量設定値(D/A値 E0h)のそれぞれの像面照度差データ(単位:μW)を示している。
Image plane illuminance difference data of 25 correction blocks for each light quantity setting value (100%, 87.5%, 75%, 62.5%, 50%, 37.5%, 25%, 12.5%) Is shown in FIG. FIG. 17 shows image plane illuminance difference data (unit: μW) of each of the 100% light intensity setting value (D / A
また、図16のそれぞれの光量設定値に対する4次近似式から、補正ブロックに対応する25の補正ブロックの像面照度データを算出する。それぞれの光量設定値(100%、87.5%、75%、62.5%、50%、37.5%、25%、12.5%)についての25の補正ブロックの4次近似式から算出した像面照度データを図18に示す(単位:μW)。図18では、100%光量設定値(D/A値 00h)〜12.5%光量設定値(D/A値 E0h)のそれぞれの像面照度データ(単位:μW)を示している。
Also, the image plane illuminance data of 25 correction blocks corresponding to the correction blocks are calculated from the fourth-order approximation formulas for the respective light intensity setting values in FIG. From the fourth-order approximation formula of 25 correction blocks for each light quantity setting value (100%, 87.5%, 75%, 62.5%, 50%, 37.5%, 25%, 12.5%) The calculated image plane illuminance data is shown in FIG. 18 (unit: μW). FIG. 18 shows image plane illuminance data (unit: μW) of 100% light intensity setting value (D / A
図17の補正ブロック10(像高−25)に注目し、その補正ブロック10の像面照度差と像面照度データを用いて補正値の算出方法を説明する。図18の補正ブロック10について、横軸をD/A設定値(dec)とし縦軸を照度とした時のグラフを図19に示す。図19のグラフは2次近似が実施可能である。図19のグラフのデータを2次近似し、2次近似式を算出したグラフを図20に示す。
Focusing on the correction block 10 (image height −25) in FIG. 17, a correction value calculation method will be described using the image plane illuminance difference and the image plane illuminance data of the
2次近似式は、Yを照度とし、XをD/A設定値(dec)とすると、
Y = −9.172×10-4X2−7.773×10-1X+231.2 ・・・式1
となる。上記の式1(2次近似式)を微分した式2は、
Y1 = −18.344×10-4X−7.773×10-1 ・・・式2
となる。
In the quadratic approximation, when Y is illuminance and X is D / A set value (dec),
Y = −9.172 × 10 −4 X 2 −7.773 × 10 −1 X + 231.2
It becomes.
Y1 = −18.344 × 10 −4 X−7.773 × 10 −1
It becomes.
Y1は、2次式に対するD/A設定値(dec)がXの時の傾き(D/A値が1h変化した時の照度の変化量)となる。例えば、補正ブロック10の87.5%光量設定値(D/A値 20h)のD/A設定値(dec)である“32”を上記の式2に代入すると、Y1は下記の値となる。
Y1 is the slope when the D / A set value (dec) for the quadratic expression is X (the amount of change in illuminance when the D / A value changes for 1 h). For example, if “32”, which is the D / A setting value (dec) of the 87.5% light intensity setting value (D / A
Y1(20h) = −18.344×10-4×32−7.773×10-1
≒ −0.836
D/A値が1h変化した時の光量の変化量が0.836μWであることを算出できる。
Y1 (20h) = − 18.344 × 10 −4 × 32−7.773 × 10 −1
≒ -0.836
It can be calculated that the amount of change in the amount of light when the D / A value changes for 1 h is 0.836 μW.
上記の式2と図17の像面照度差データとから補正値を算出できることとなる。例えば、補正ブロック10の87.5%光量設定値(D/A値20h)の補正値の算出方法は、次のようになる。D/A値が1h変化した時の光量の変化量が0.836μWであり、図18から像面照度差データは30.9μWであるので、ブロック10の87.5%光量設定値(D/A値 20h)の補正値は、下記の値となる。
The correction value can be calculated from
30.9/0.836 = 36.9 ≒ 37(dec) = 25h
その他の補正ブロックの光量設定値においても、上記と同様に、D/A値と照度の関係の2次近似式を算出し、その2次近似式(n次近似式(n≧2))を微分した式からD/A値が1h変化した時の照度の変化量を算出する。そして、図17の像面照度差データと、D/A値が1h変化した時の照度の変化量とから、それぞれ補正値を算出する。
30.9 / 0.836 = 36.9 ≒ 37 (dec) = 25h
Also for the light intensity setting values of the other correction blocks, a quadratic approximate expression of the relationship between the D / A value and the illuminance is calculated as described above, and the quadratic approximate expression (n-order approximate expression (n ≧ 2)) is calculated. The amount of change in illuminance when the D / A value changes for 1 h is calculated from the differentiated expression. Then, correction values are calculated from the image plane illuminance difference data of FIG. 17 and the amount of change in illuminance when the D / A value changes for 1 h.
上記の方法で算出される補正値は、光量設定値が00h、20h、40h、60h、80h、A0h、C0h、E0hにおける補正値である。光量設定値(00h、20h、40h、60h、80h、A0h、C0h、E0h)以外の補正値の算出方法は、次の通りである。それぞれの光量設定値(00h、20h、40h、60h、80h、A0h、C0h、E0h)の補正値を、横軸をD/A設定値とし縦軸を補正値としたグラフにプロットし、それぞれを結んだ直線上の値とする。そのグラフを図21に示す(横軸:D/A設定値(dec)、縦軸:補正値)。 The correction values calculated by the above method are correction values when the light intensity setting values are 00h, 20h, 40h, 60h, 80h, A0h, C0h, and E0h. A method for calculating correction values other than the light amount setting values (00h, 20h, 40h, 60h, 80h, A0h, C0h, E0h) is as follows. The correction values of the respective light intensity setting values (00h, 20h, 40h, 60h, 80h, A0h, C0h, E0h) are plotted on a graph with the horizontal axis as the D / A setting value and the vertical axis as the correction value. The value on the connected straight line. The graph is shown in FIG. 21 (horizontal axis: D / A set value (dec), vertical axis: correction value).
例えば、補正ブロック10の光量設定として20h設定時(87.5%光量設定値)と、40h設定時(75%光量設定値)との間の、30h設定時(81.25%光量設定値)の補正値の算出方法を説明する。補正ブロック10の30h設定時の補正値を算出するには、図21に示す20h設定時の補正値と40h設定時の補正値を結ぶ直線の式を考える。
For example, when the light amount of the
Bを補正値としAをD/A設定値として10進数で考えると、D/A設定値が20hの時の(A、B)座標は次のようになる。20hを10進数で表すと32である。また、補正ブロック10の20h設定時の補正値は、上記で算出したように25hであり、25hを10進数で表すと37である。従って、(A、B)座標は(32、37)となる。
Considering a decimal value with B as a correction value and A as a D / A set value, the coordinates (A, B) when the D / A set value is 20h are as follows. When 20h is expressed as a decimal number, it is 32. The correction value when the
次に、補正ブロック10の40h設定時の(A、B)座標を算出する。40hを10進数で表すと64である。補正ブロック10の40h設定時の補正値は、式2と図18の像面照度差データとから下記のように算出される。
Next, (A, B) coordinates when the
Y1(40h) = −18.344×10-4×64−7.773×10-1
≒ −0.895
26.4/0.895 = 29.4 ≒ 29(dec) = 1Dh
補正値が1Dhであり、1Dhを10進数で表すと29である。よって、補正ブロック10の40h設定時の(A、B)座標は(64、29)である。よって、20hと40h補正値の直線の式は、
B = −1/4A+45
となる。補正ブロック10の30h設定値の補正値は、30hを10進数で表すと48となるので、Aに48を代入すると、
B = −1/4×48+45 = 33 = 21h
となる。よって、補正ブロック10の30h設定時のD/A設定値は、
30h+21h = 51h
となる。
Y1 (40h) = − 18.344 × 10 −4 × 64−7.773 × 10 −1
≒ -0.895
26.4 / 0.895 = 29.4 ≒ 29 (dec) = 1Dh
The correction value is 1Dh, and 1Dh is 29 in decimal. Accordingly, the (A, B) coordinates when the
B = -1 / 4A + 45
It becomes. The correction value of the 30h set value of the
B = −1 / 4 × 48 + 45 = 33 = 21h
It becomes. Therefore, the D / A set value when the
30h + 21h = 51h
It becomes.
(5)補正値格納
上述した3種類の光量に対する像面照度データから照度補正値を生成する場合の方法と同様に格納を行う。
(5) Correction value storage The storage is performed in the same manner as the method for generating the illuminance correction value from the image plane illuminance data for the three types of light amounts described above.
以上説明したように本実施の形態によれば、3種類のレーザ光量に対する像面照度データから照度補正値を生成する処理では、レーザの複数の光量設定値に対する、感光ドラム19の複数の像高の照度の測定値を4次近似した4次近似式を算出する。次に、4次近似式を用いて感光ドラム19の任意の像高の照度と、少なくとも1つ以上の他の像高の照度との照度差を、複数の光量設定値について算出する。次に、照度差に基づき照度補正値を算出し、照度補正値に基づき半導体レーザ12から射出するレーザの光量を制御する。
As described above, according to the present embodiment, in the process of generating the illuminance correction value from the image plane illuminance data for the three types of laser light amounts, the plurality of image heights of the
また、8種類の像面照度データから照度補正値を生成する処理では、レーザの複数の光量設定値に対する、感光ドラム19の複数の像高の照度の測定値を2次近似した2次近似式を算出し、2次近似式を微分した式を算出する。次に、2次近似式を微分した式を用いて感光ドラム19の任意の像高の照度と、少なくとも1つ以上の他の像高の照度との照度差を、複数の光量設定値について算出する。次に、照度差に基づき照度補正値を算出し、照度補正値に基づき半導体レーザ12から射出するレーザの光量を制御する。
Further, in the process of generating the illuminance correction value from the eight types of image plane illuminance data, a quadratic approximation formula that secondarily approximates the measured values of the illuminances at the plurality of image heights of the
上記制御により、レーザにおける実際の各光量設定値(D/A値)に対する照度特性に適する照度補正値を算出することができ、算出した照度補正値を用いてレーザ光量を制御することが可能となる。これにより、感光ドラム上の像面照度分布が一定となるように補正を行う際の照度補正精度を向上させることが可能となる。 With the above control, it is possible to calculate an illuminance correction value suitable for the illuminance characteristics for each actual light amount setting value (D / A value) in the laser, and it is possible to control the laser light amount using the calculated illuminance correction value. Become. This makes it possible to improve the illuminance correction accuracy when performing correction so that the image plane illuminance distribution on the photosensitive drum is constant.
[他の実施の形態]
また、本発明の目的は、以下の処理を実行することにより達成される。即ち、上述した実施形態の機能を実現するソフトウェアのプログラムコードを記録した記憶媒体を、システム或いは装置に供給し、そのシステム或いは装置のコンピュータ(又はCPUやMPU等)が記憶媒体に格納されたプログラムコードを読み出す処理である。
[Other embodiments]
The object of the present invention is achieved by executing the following processing. That is, a storage medium that records a program code of software that realizes the functions of the above-described embodiments is supplied to a system or apparatus, and a computer (or CPU, MPU, etc.) of the system or apparatus is stored in the storage medium. This is the process of reading the code.
この場合、記憶媒体から読み出されたプログラムコード自体が前述した実施の形態の機能を実現することになり、そのプログラムコード及び該プログラムコードを記憶した記憶媒体は本発明を構成することになる。 In this case, the program code itself read from the storage medium realizes the functions of the above-described embodiments, and the program code and the storage medium storing the program code constitute the present invention.
また、プログラムコードを供給するための記憶媒体としては、次のものを用いることができる。例えば、フロッピー(登録商標)ディスク、ハードディスク、光磁気ディスク、CD−ROM、CD−R、CD−RW、DVD−ROM、DVD−RAM、DVD−RW、DVD+RW、磁気テープ、不揮発性のメモリカード、ROM等である。または、プログラムコードをネットワークを介してダウンロードしてもよい。 Moreover, the following can be used as a storage medium for supplying the program code. For example, floppy (registered trademark) disk, hard disk, magneto-optical disk, CD-ROM, CD-R, CD-RW, DVD-ROM, DVD-RAM, DVD-RW, DVD + RW, magnetic tape, nonvolatile memory card, ROM or the like. Alternatively, the program code may be downloaded via a network.
また、コンピュータが読み出したプログラムコードを実行することにより、上記実施の形態の機能が実現される場合も本発明に含まれる。加えて、そのプログラムコードの指示に基づき、コンピュータ上で稼動しているOS(オペレーティングシステム)等が実際の処理の一部または全部を行い、その処理により前述した実施形態の機能が実現される場合も含まれる。 Further, the present invention includes a case where the function of the above-described embodiment is realized by executing the program code read by the computer. In addition, an OS (operating system) running on the computer performs part or all of the actual processing based on an instruction of the program code, and the functions of the above-described embodiments are realized by the processing. Is also included.
更に、前述した実施形態の機能が以下の処理により実現される場合も本発明に含まれる。即ち、記憶媒体から読み出されたプログラムコードが、コンピュータに挿入された機能拡張ボードやコンピュータに接続された機能拡張ユニットに備わるメモリに書き込まれる。その後、そのプログラムコードの指示に基づき、その機能拡張ボードや機能拡張ユニットに備わるCPU等が実際の処理の一部または全部を行う場合である。 Furthermore, the present invention includes a case where the functions of the above-described embodiment are realized by the following processing. That is, the program code read from the storage medium is written in a memory provided in a function expansion board inserted into the computer or a function expansion unit connected to the computer. Thereafter, based on the instruction of the program code, the CPU or the like provided in the function expansion board or function expansion unit performs part or all of the actual processing.
1 画像形成装置
2 光学走査部
3 エンジン制御部
5 画像制御部
11 レーザ駆動部
21 レーザ駆動回路
61 像面照度測定部
DESCRIPTION OF
Claims (9)
前記レーザ発光手段による前記像担持体に対する複数のレーザ照射位置におけるレーザの照度を測定する測定手段と、
前記レーザ発光手段から射出するレーザにおける複数の光量設定値に対する、前記測定手段により測定された複数のレーザ照射位置の照度の測定値をn次近似したn次近似式(n≧2)を算出する第1の算出手段と、
前記第1の算出手段により算出された前記n次近似式を用いて、前記測定手段により測定された前記像担持体に対する任意のレーザ照射位置の照度と、前記像担持体に対する少なくとも1つ以上の他のレーザ照射位置の照度との照度差を、前記複数の光量設定値について算出する第2の算出手段と、
前記第2の算出手段により算出された照度差に基づいて、照度補正値を算出する第3の算出手段と、
前記第3の算出手段により算出された照度補正値に基づいて、前記レーザ発光手段により射出するレーザの光量を制御する制御手段と、
を備えることを特徴とする光学走査装置。 In an optical scanning device that forms a latent image on the image carrier by irradiating the image carrier with a laser emitted by a laser emitting unit,
Measuring means for measuring the illuminance of the laser at a plurality of laser irradiation positions on the image carrier by the laser emitting means;
An nth-order approximation formula (n ≧ 2) is calculated by nth-order approximation of measured values of illuminance at a plurality of laser irradiation positions measured by the measurement unit with respect to a plurality of light amount setting values in a laser emitted from the laser emitting unit. First calculating means;
Using the nth-order approximation calculated by the first calculation means, the illuminance at an arbitrary laser irradiation position on the image carrier measured by the measurement means, and at least one or more of the image carrier A second calculating means for calculating an illuminance difference with the illuminance at another laser irradiation position for the plurality of light amount setting values;
Third calculation means for calculating an illuminance correction value based on the illuminance difference calculated by the second calculation means;
Control means for controlling the amount of laser light emitted by the laser light emitting means based on the illuminance correction value calculated by the third calculating means;
An optical scanning device comprising:
前記レーザ発光手段による前記像担持体に対する複数のレーザ照射位置におけるレーザの照度を測定する測定手段と、
前記レーザ発光手段から射出するレーザにおける複数の光量設定値に対する、前記測定手段により測定された複数のレーザ照射位置の照度の測定値をn次近似したn次近似式(n≧2)を算出し、前記n次近似式を微分した式を算出する第1の算出手段と、
前記第1の算出手段により算出された前記n次近似式を微分した式を用いて、前記測定手段により測定された前記像担持体に対する任意のレーザ照射位置の照度と、前記像担持体に対する少なくとも1つ以上の他のレーザ照射位置の照度との照度差を、前記複数の光量設定値について算出する第2の算出手段と、
前記第2の算出手段により算出された照度差に基づいて、照度補正値を算出する第3の算出手段と、
前記第3の算出手段により算出された照度補正値に基づいて、前記レーザ発光手段により射出するレーザの光量を制御する制御手段と、
を備えることを特徴とする光学走査装置。 In an optical scanning device that forms a latent image on the image carrier by irradiating the image carrier with a laser emitted by a laser emitting unit,
Measuring means for measuring the illuminance of the laser at a plurality of laser irradiation positions on the image carrier by the laser emitting means;
An nth-order approximation formula (n ≧ 2) is obtained by nth-order approximation of measured values of illuminance at a plurality of laser irradiation positions measured by the measuring unit with respect to a plurality of light amount setting values in a laser emitted from the laser emitting unit. First calculating means for calculating an expression obtained by differentiating the n-th order approximation expression;
Using an expression obtained by differentiating the n-th order approximate expression calculated by the first calculation means, the illuminance at an arbitrary laser irradiation position with respect to the image carrier measured by the measurement means, and at least the image carrier Second calculating means for calculating an illuminance difference with illuminance at one or more other laser irradiation positions for the plurality of light amount setting values;
Third calculation means for calculating an illuminance correction value based on the illuminance difference calculated by the second calculation means;
Control means for controlling the amount of laser light emitted by the laser light emitting means based on the illuminance correction value calculated by the third calculating means;
An optical scanning device comprising:
前記レーザ発光手段による前記像担持体に対する複数のレーザ照射位置におけるレーザの照度を測定する測定ステップと、
前記レーザ発光手段から射出するレーザにおける複数の光量設定値に対する、前記測定ステップにより測定された複数のレーザ照射位置の照度の測定値をn次近似したn次近似式(n≧2)を算出する第1の算出ステップと、
前記第1の算出ステップにより算出された前記n次近似式を用いて、前記測定ステップにより測定された前記像担持体に対する任意のレーザ照射位置の照度と、前記像担持体に対する少なくとも1つ以上の他のレーザ照射位置の照度との照度差を、前記複数の光量設定値について算出する第2の算出ステップと、
前記第2の算出ステップにより算出された照度差に基づいて、照度補正値を算出する第3の算出ステップと、
前記第3の算出ステップにより算出された照度補正値に基づいて、前記レーザ発光手段により射出するレーザの光量を制御する制御ステップと、を有することを特徴とする制御方法。 In a control method of an optical scanning device for forming a latent image on the image carrier by irradiating the image carrier with a laser emitted by a laser emitting unit,
A measurement step of measuring the illuminance of the laser at a plurality of laser irradiation positions on the image carrier by the laser emitting means;
An nth-order approximation formula (n ≧ 2) is calculated by nth-order approximation of measured values of illuminance at a plurality of laser irradiation positions measured in the measurement step with respect to a plurality of light amount setting values in a laser emitted from the laser emitting unit. A first calculation step;
Using the n-th order approximate expression calculated in the first calculation step, the illuminance at an arbitrary laser irradiation position on the image carrier measured in the measurement step, and at least one or more on the image carrier A second calculation step of calculating an illuminance difference from the illuminance at another laser irradiation position for the plurality of light amount setting values;
A third calculation step for calculating an illuminance correction value based on the illuminance difference calculated in the second calculation step;
And a control step of controlling the amount of laser light emitted by the laser light emitting means based on the illuminance correction value calculated in the third calculation step.
前記レーザ発光手段による前記像担持体に対する複数のレーザ照射位置におけるレーザの照度を測定する測定ステップと、
前記レーザ発光手段から射出するレーザにおける複数の光量設定値に対する、前記測定ステップにより測定された複数のレーザ照射位置の照度の測定値をn次近似したn次近似式(n≧2)を算出し、前記n次近似式を微分した式を算出する第1の算出ステップと、
前記第1の算出ステップにより算出された前記n次近似式を微分した式を用いて、前記測定ステップにより測定された前記像担持体に対する任意のレーザ照射位置の照度と、前記像担持体に対する少なくとも1つ以上の他のレーザ照射位置の照度との照度差を、前記複数の光量設定値について算出する第2の算出ステップと、
前記第2の算出ステップにより算出された照度差に基づいて、照度補正値を算出する第3の算出ステップと、
前記第3の算出ステップにより算出された照度補正値に基づいて、前記レーザ発光手段により射出するレーザの光量を制御する制御ステップと、を有することを特徴とする制御方法。 In a control method of an optical scanning device for forming a latent image on the image carrier by irradiating the image carrier with a laser emitted by a laser emitting unit,
A measurement step of measuring the illuminance of the laser at a plurality of laser irradiation positions on the image carrier by the laser emitting means;
An nth-order approximation formula (n ≧ 2) is obtained by nth-order approximation of measured values of illuminance at a plurality of laser irradiation positions measured in the measurement step with respect to a plurality of light amount setting values in a laser emitted from the laser emitting unit. A first calculation step for calculating an expression obtained by differentiating the n-th order approximation expression;
Using an expression obtained by differentiating the nth-order approximate expression calculated in the first calculation step, the illuminance at an arbitrary laser irradiation position on the image carrier measured in the measurement step, and at least the image carrier A second calculation step of calculating an illuminance difference with illuminance at one or more other laser irradiation positions for the plurality of light amount setting values;
A third calculation step for calculating an illuminance correction value based on the illuminance difference calculated in the second calculation step;
And a control step of controlling the amount of laser light emitted by the laser light emitting means based on the illuminance correction value calculated in the third calculation step.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008038919A JP2009196170A (en) | 2008-02-20 | 2008-02-20 | Optical scanner, image forming apparatus, controlling method and program |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008038919A JP2009196170A (en) | 2008-02-20 | 2008-02-20 | Optical scanner, image forming apparatus, controlling method and program |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009196170A true JP2009196170A (en) | 2009-09-03 |
| JP2009196170A5 JP2009196170A5 (en) | 2011-05-06 |
Family
ID=41140256
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2008038919A Pending JP2009196170A (en) | 2008-02-20 | 2008-02-20 | Optical scanner, image forming apparatus, controlling method and program |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2009196170A (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010099974A (en) * | 2008-10-24 | 2010-05-06 | Canon Inc | Image forming device and its control method |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005131961A (en) * | 2003-10-30 | 2005-05-26 | Fuji Xerox Co Ltd | Image forming apparatus |
| JP2005262485A (en) * | 2004-03-16 | 2005-09-29 | Canon Inc | Image forming device and control method therefor |
| JP2007168309A (en) * | 2005-12-22 | 2007-07-05 | Canon Inc | Optical scanning device |
-
2008
- 2008-02-20 JP JP2008038919A patent/JP2009196170A/en active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2005131961A (en) * | 2003-10-30 | 2005-05-26 | Fuji Xerox Co Ltd | Image forming apparatus |
| JP2005262485A (en) * | 2004-03-16 | 2005-09-29 | Canon Inc | Image forming device and control method therefor |
| JP2007168309A (en) * | 2005-12-22 | 2007-07-05 | Canon Inc | Optical scanning device |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010099974A (en) * | 2008-10-24 | 2010-05-06 | Canon Inc | Image forming device and its control method |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5754955B2 (en) | Image forming apparatus | |
| US9841699B2 (en) | Optical scanning apparatus and image forming apparatus | |
| JP2007329429A (en) | Image forming apparatus and method of correcting quantity of laser light | |
| US8957932B2 (en) | Exposure apparatus and image forming apparatus | |
| US8665303B2 (en) | Image forming apparatus provided with laser drive apparatus for controlling light amount of laser beam scanned by scanning unit | |
| JP5791282B2 (en) | Image forming apparatus | |
| KR930000694B1 (en) | Optical beam scanning device | |
| US20130162746A1 (en) | Optical scanning apparatus and image forming apparatus | |
| JP2009196170A (en) | Optical scanner, image forming apparatus, controlling method and program | |
| JP4908979B2 (en) | Laser light quantity control device | |
| JP2008012852A (en) | Image forming device | |
| JP4158568B2 (en) | Light source control device | |
| JP2010201728A (en) | Light output device and image forming device including the same | |
| US8593495B2 (en) | Image forming apparatus that forms image by scanning photosensitive member with multiple beams | |
| JP5848598B2 (en) | Optical scanning apparatus and image forming apparatus | |
| US6891560B2 (en) | Method of reducing consumption of developer used in electrophotographic processor, and electrophotographic processor performing the method | |
| JP2007168309A (en) | Optical scanning device | |
| JP5705195B2 (en) | Image forming apparatus | |
| JP2009090525A (en) | Image forming apparatus and its adjusting method | |
| JP5219405B2 (en) | Correction value determination device, correction value determination method, and optical scanning device | |
| US20060238831A1 (en) | Electrophotographic image forming apparatus and image forming method | |
| JP3728090B2 (en) | Image forming apparatus | |
| JP2021016955A (en) | Optical scanner and image formation apparatus including the same | |
| JP2021186974A (en) | Image formation device | |
| JP2011235578A (en) | Ld (laser diode) control device and image forming apparatus |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20110218 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110323 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20121029 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20121106 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20130416 |