JP2009165244A - Power supply system - Google Patents
Power supply system Download PDFInfo
- Publication number
- JP2009165244A JP2009165244A JP2007341286A JP2007341286A JP2009165244A JP 2009165244 A JP2009165244 A JP 2009165244A JP 2007341286 A JP2007341286 A JP 2007341286A JP 2007341286 A JP2007341286 A JP 2007341286A JP 2009165244 A JP2009165244 A JP 2009165244A
- Authority
- JP
- Japan
- Prior art keywords
- voltage
- fuel cell
- boost converter
- power
- battery
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images































Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E60/00—Enabling technologies; Technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02E60/10—Energy storage using batteries
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02E—REDUCTION OF GREENHOUSE GAS [GHG] EMISSIONS, RELATED TO ENERGY GENERATION, TRANSMISSION OR DISTRIBUTION
- Y02E60/00—Enabling technologies; Technologies with a potential or indirect contribution to GHG emissions mitigation
- Y02E60/30—Hydrogen technology
- Y02E60/50—Fuel cells
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02T—CLIMATE CHANGE MITIGATION TECHNOLOGIES RELATED TO TRANSPORTATION
- Y02T10/00—Road transport of goods or passengers
- Y02T10/60—Other road transportation technologies with climate change mitigation effect
- Y02T10/70—Energy storage systems for electromobility, e.g. batteries
Landscapes
- Electric Propulsion And Braking For Vehicles (AREA)
- Fuel Cell (AREA)
- Charge And Discharge Circuits For Batteries Or The Like (AREA)
- Secondary Cells (AREA)
Abstract
Description
本発明は、駆動装置に電力を供給する電力供給システム、例えば電気化学反応にて電力を発電する燃料電池からの電力を駆動装置に供給するシステムに関するものである。 The present invention relates to a power supply system that supplies power to a drive device, for example, a system that supplies power to a drive device from a fuel cell that generates power by an electrochemical reaction.
近年、運転効率および環境性に優れる電源として燃料電池が注目されている。燃料電池は燃料ガスの供給量を制御して要求に応じた電力を出力するが、ガス供給量の応答遅れに起因して、出力電力の応答性が低くなる場合がある。そこで、燃料電池とバッテリ等の蓄電装置とを並列に接続して電源を構成する技術が開示されており、そこでは、燃料電池の出力電圧をDC−DCコンバータで変換することにより、バッテリと燃料電池の併用を図っている(例えば、特許文献1〜4を参照)。
In recent years, a fuel cell has attracted attention as a power source excellent in operating efficiency and environmental performance. Although the fuel cell controls the supply amount of the fuel gas and outputs the electric power according to the request, the responsiveness of the output power may be lowered due to the delay in the response of the gas supply amount. Therefore, a technique for configuring a power source by connecting a fuel cell and a power storage device such as a battery in parallel is disclosed, in which the battery and the fuel are converted by converting the output voltage of the fuel cell by a DC-DC converter. The battery is used together (for example, see
一方、燃料電池は、耐久性向上のため、特に触媒のシンタリング現象を回避することが必要とされる(例えば、下記特許文献1参照)。シンタリング現象を抑制するには、燃料電池出力電圧を開放端子電圧(OCVともいう)に近い高電圧状態に近づけない制御が有効とされる。そして、DC−DCコンバータは、そのような燃料電池の出力電圧制御手段としても機能する(例えば、下記特許文献2参照)。
しかしながら、DC−DCコンバータを介して駆動装置に電力を供給する場合、リアクトルのヒステリシスに伴う鉄損、半導体素子のスイッチング動作に伴うスイッチング損失等(以下、これらを含めてスイッチング損失という)の損失が問題となる。このようなスイッチング損失は、損失が電流に比例する銅損とは異なり、供給される電力、電圧、電流等への依存が少ない。そのため、特に低負荷領域では、スイッチング損失が目立つことになる。そのような低負荷領域でのスイッチング損失を低減するため、可能な限りDC−DCコンバータの動作を停止させることが望ましい。 However, when power is supplied to the drive device via the DC-DC converter, there are losses such as iron loss associated with the hysteresis of the reactor, switching loss associated with the switching operation of the semiconductor element (hereinafter referred to as switching loss). It becomes a problem. Such switching loss is less dependent on supplied power, voltage, current, etc., unlike copper loss, where loss is proportional to current. Therefore, the switching loss is particularly noticeable in the low load region. In order to reduce the switching loss in such a low load region, it is desirable to stop the operation of the DC-DC converter as much as possible.
その場合、上記シンタリングの原因となり、燃料電池の耐久性に影響を与える高電位状態を回避した制御との両立をとることが重要となる。本発明の課題は、燃料電池システムからDC−DCコンバータを介して駆動装置に電力を供給する場合に、効率向上と耐久性の向上という2つの要求に配慮した電力供給システムを提供することにある。 In that case, it is important to achieve both the control that avoids the high potential state which causes the sintering and affects the durability of the fuel cell. An object of the present invention is to provide a power supply system that takes into account two requirements of improving efficiency and improving durability when supplying power from a fuel cell system to a drive device via a DC-DC converter. .
本発明は前記課題を解決するために、以下の手段を採用した。すなわち、本発明は、移動体に搭載され、負荷回路を通じて前記移動体の駆動装置に電力を供給する電力供給システムである。本電力供給システムは、負荷回路に電力を供給する燃料電池スタックと、電力を蓄積するとともに、負荷回路に電力を供給可能な蓄電装置と、燃料電池スタックと負荷回路との間に設けられ燃料電池スタックの端子電圧を負荷回路の入力電圧に変換する第1の電圧変換器と、蓄電装置の端子電圧を前記負荷回路の入力電圧に変換する第2の電圧変換器と、制御部とを備える。 The present invention employs the following means in order to solve the above problems. That is, the present invention is a power supply system that is mounted on a moving body and supplies power to the driving device of the moving body through a load circuit. The power supply system includes a fuel cell stack that supplies power to a load circuit, a power storage device that accumulates power and can supply power to the load circuit, and a fuel cell provided between the fuel cell stack and the load circuit. A first voltage converter that converts a terminal voltage of the stack into an input voltage of the load circuit, a second voltage converter that converts a terminal voltage of the power storage device into an input voltage of the load circuit, and a control unit.
そして、制御部は、駆動装置の駆動に伴う負荷回路の要求電圧を算出する手段と、燃料
電池スタックの端子電圧が負荷回路の要求電圧を超える場合に、第1の電圧変換器を停止させて燃料電池スタックの出力電力を負荷回路に伝達する手段と、第2の電圧変換器を通じて負荷回路の入力電圧を制御することによって燃料電池スタックの端子電圧を所定の基準電圧以下に制限する第1の電圧制限手段と、を有する。
Then, the control unit stops the first voltage converter when the terminal voltage of the fuel cell stack exceeds the required voltage of the load circuit and the means for calculating the required voltage of the load circuit accompanying the driving of the driving device. First means for limiting the terminal voltage of the fuel cell stack to a predetermined reference voltage or lower by controlling the input voltage of the load circuit through the second voltage converter and means for transmitting the output power of the fuel cell stack to the load circuit Voltage limiting means.
本電力供給システムでは、燃料電池スタックの端子電圧が負荷回路の要求電圧を超える場合には、第1の電圧変換器を停止させる。したがって、不必要に、第1の電圧変換器を動作させず、特に、負荷回路の要求電圧が低いときに、電力供給の効率を向上できる。一方、第2の電圧変換器によって燃料電池スタックの端子電圧を制御し、基準電圧以下に制限することができる。 In the power supply system, when the terminal voltage of the fuel cell stack exceeds the required voltage of the load circuit, the first voltage converter is stopped. Therefore, the first voltage converter is not operated unnecessarily, and the power supply efficiency can be improved particularly when the required voltage of the load circuit is low. On the other hand, the terminal voltage of the fuel cell stack can be controlled by the second voltage converter and limited to a reference voltage or less.
また、第2の電圧変換器が昇圧回路である場合、制御部は、第2の電圧変換器の蓄電装置側の電圧に対して負荷回路側の電圧が昇圧された関係にないときに第2の電圧変換器を停止する手段と、第2の電圧変換器が停止したときに第1の電圧変換器を動作させて、燃料電池スタックの端子電圧を基準電圧以下に制限する第2の電圧制限手段と、を有する。 Further, when the second voltage converter is a booster circuit, the control unit may select the second when the voltage on the load circuit side is not boosted with respect to the voltage on the power storage device side of the second voltage converter. And a second voltage limiter that operates the first voltage converter when the second voltage converter stops to limit the terminal voltage of the fuel cell stack to a reference voltage or lower. Means.
本電力供給システムによれば、第2の電圧変換器が昇圧回路であって、昇圧の条件が充足されないときに、第1の電圧変換器を動作させて、燃料電池スタックの端子電圧を制限することができる。
蓄電装置の充電状態を検知する充電センサをさらに備え、制御部は、蓄電装置の充電状態とその充電状態で蓄電装置において放電すべき電力との関係を記録した放電要求マップを保持する手段と、負荷に供給すべき要求電力を算出する手段と、充電状態が許容レベルを超えたときに、要求電力から蓄電装置において放電すべき電力を除外した燃料電池スタック要求電力を算出する手段と、燃料電池スタック要求電力を燃料電池スタックから出力させるために前記燃料電池スタックの端子電圧の目標値を設定する手段と、端子電圧の目標値が基準電圧を越える場合に、目標値を前記基準電圧以下の値に再設定する手段と、燃料電池スタックの端子電圧が目標値となるにように前記第1の電圧変換器を制御する手段とをさらに備える。
According to the power supply system, when the second voltage converter is a booster circuit and the boosting condition is not satisfied, the first voltage converter is operated to limit the terminal voltage of the fuel cell stack. be able to.
A charge sensor that detects a charge state of the power storage device; and a controller that holds a discharge request map that records a relationship between a charge state of the power storage device and power to be discharged in the power storage device in the charge state; Means for calculating required power to be supplied to the load; means for calculating fuel cell stack required power excluding power to be discharged from the power storage device when the state of charge exceeds an allowable level; and a fuel cell Means for setting the target value of the terminal voltage of the fuel cell stack to output the stack required power from the fuel cell stack, and when the target value of the terminal voltage exceeds the reference voltage, the target value is a value equal to or less than the reference voltage. And means for controlling the first voltage converter so that the terminal voltage of the fuel cell stack becomes a target value.
本電力供給システムによれば、蓄電装置の充電状態を反映して、燃料電池の分担出力を決定するとともに、燃料電池の端子電圧の目標値が基準電圧を越える場合に、目標値を前記基準電圧未満の値に再設定し、制御する。したがって、燃料電池と蓄電装置の負担割合を蓄電装置の充電状態から決定するとともに、燃料電池の端子電圧の目標値が基準電圧以下となるように制御できる。 According to this power supply system, the shared output of the fuel cell is determined reflecting the state of charge of the power storage device, and when the target value of the terminal voltage of the fuel cell exceeds the reference voltage, the target value is set to the reference voltage. Reset to a value less than and control. Therefore, the burden ratio between the fuel cell and the power storage device can be determined from the state of charge of the power storage device, and the target value of the terminal voltage of the fuel cell can be controlled to be equal to or lower than the reference voltage.
また、制御部は、移動体の移動を指令する操作レバーの位置を検知する手段と、操作レバーの位置が停止を指令している場合に、第1の電圧変換器および第2の電圧変換器を停止する手段と、第1の電圧変換器および第2の電圧変換器が停止し、かつ、燃料電池スタックの端子電圧が基準電圧から所定の範囲に近づいたときに、補機を通じて前記燃料電池スタックの電力を消費する手段とをさらに備える。 Further, the control unit detects the position of the operating lever that commands the movement of the moving body, and the first voltage converter and the second voltage converter when the position of the operating lever commands stop. And when the first voltage converter and the second voltage converter are stopped, and the terminal voltage of the fuel cell stack approaches a predetermined range from the reference voltage, the fuel cell is passed through the auxiliary device. And means for consuming the power of the stack.
本電力供給システムによれば、不必要な第1の電圧変換器および第2の電圧変換器の動作を抑制するとともに、燃料電池スタックの端子電圧が基準電圧から所定の範囲から遠ざける方向に、補機を通じて制御できる。なお、第2の電圧変換器を昇降圧可能な電圧変換器としてもよく、その場合には、第1の電圧変換器を停止させたいときに、いつでも停止させることが可能になる。 According to the power supply system, unnecessary operations of the first voltage converter and the second voltage converter are suppressed, and the terminal voltage of the fuel cell stack is compensated in a direction away from a predetermined range from the reference voltage. It can be controlled through the machine. Note that the second voltage converter may be a voltage converter capable of step-up / step-down, and in that case, when the first voltage converter is desired to be stopped, it can be stopped at any time.
本発明によれば、燃料電池システムからDC−DCコンバータを介して駆動装置に電力を供給する場合に、効率向上と耐久性の向上という2つの要求に対応できる。 ADVANTAGE OF THE INVENTION According to this invention, when supplying electric power from a fuel cell system to a drive device via a DC-DC converter, it is possible to meet two requirements of improving efficiency and improving durability.
《第1実施形態》
図1は、本発明に係る燃料電池システム10の概略構成および、該燃料電池システム10より供給される電力を駆動源とする移動体の車両1を概略的に示す。車両1は、駆動輪2が駆動モータ(以下、単に「モータ」という。)16によって駆動されることで自走し、移動可能となる。このモータ16は、いわゆる三相交流モータであって、インバータ15から交流電力の供給を受ける。更に、このインバータ15へは、燃料電池システム10のメイン電力源である燃料電池(以下、「FC」ともいう。)11と、二次電池であるバッテリ13から直流電力が供給され、それがインバータ15で交流へ変換されている。
<< First Embodiment >>
FIG. 1 schematically shows a schematic configuration of a
ここで、燃料電池11は、水素タンク17に貯蔵されている水素ガスとコンプレッサ18によって圧送されてくる空気中の酸素との電気化学反応にて発電を行い、該燃料電池11とインバータ15との間には、昇圧型のDC−DCコンバータであるFC昇圧コンバータ12が電気的に接続されている。これにより、燃料電池11からの出力電圧は、FC昇圧コンバータ12によって制御可能な範囲で任意の電圧に昇圧され、インバータ15に印加される。また、このFC昇圧コンバータ12の昇圧動作によって燃料電池11の端子電圧を制御することも可能となる。尚、FC昇圧コンバータ12の詳細な構成については、後述する。また、バッテリ13は、充放電が可能な蓄電装置であって、該バッテリ13とインバータ15との間に該インバータ15に対して上記FC昇圧コンバータ12と並列になるように、昇圧型のバッテリ昇圧コンバータ14が電気的に接続されている。これにより、バッテリ13からの出力電圧は、バッテリ昇圧コンバータ14によって制御可能な範囲で任意の電圧に昇圧され、インバータ15に印加される。また、このバッテリ昇圧コンバータ14の昇圧動作によってインバータ15の端子電圧を制御することも可能となる。尚、図1中に示すように、燃料電池システム10においては、昇圧型のバッテリ昇圧コンバータ14に代えて、昇圧動作および降圧動作が可能な昇降圧型のコンバータも採用可能である。以下の実施例では、主にバッテリ昇圧コンバータ14を昇圧型のコンバータとして説明を進めていくが、これには昇降圧型のコンバータの採用を制限する意図は無く、その採用に際しては適宜調整が行われる。そして、昇降圧型コンバータを採用することにより更に特筆すべき事実については適切にその開示を行っていく。
Here, the
また車両1には、電子制御ユニット(以下、「ECU」という。)20が備えられ、上述した各制御対象に電気的に接続されることで、燃料電池11の発電やモータ16の駆動等が制御されることになる。例えば、車両1には、ユーザからの加速要求を受けるアクセルペダルが設けられ、その開度がアクセルペダルセンサ21によって検出され、その検出信号がECU20に電気的に伝えられる。また、ECU20は、モータ16の回転数を検出するエンコーダにも電気的に接続され、これによりECU20でモータ16の回転数が検出される。ECU20は、これらの検出値等に基づいて、各種の制御が可能である。
Further, the
このように構成される燃料電池システム10では、車両1のユーザが踏んだアクセルペダルの開度がアクセルペダルセンサ21によって検出され、ECU20がそのアクセル開度とモータ16の回転数等に基づいて、燃料電池11の発電量やバッテリ13からの充放電量が適宜制御される。ここで、移動体である車両1の燃費を向上させるために、モータ16が高電圧低電流仕様のPMモータとなっている。従って、モータ16は、低電流で高トルクを発揮することが可能となるため、モータ内部の巻線やその他の配線での発熱を軽減することが可能となり、またインバータ15の定格出力を小さくすることが可能となる。具体的には、モータ16では低電流で比較的大きなトルク出力を可能とするためにその逆起電圧が比較的高く設定される一方で、その高逆起電圧に抗して高回転数での駆動が可能となるように、燃料電池システム10からの供給電圧が高く設定される。このとき、燃料電池11とインバータ15の間にFC昇圧コンバータ12を設け、バッテリ13とイン
バータ15との間にもバッテリ昇圧コンバータ14を設けることで、インバータ15への供給電圧の高電圧化が図られる。繰り返しにはなるが、このバッテリ昇圧コンバータ14に代えて昇降圧型のコンバータも採用可能である。
In the
このように燃料電池システム10をFC昇圧コンバータ12を含む構成とすることで、燃料電池11自体の出力電圧(端子間電圧)が低くても、FC昇圧コンバータ12の昇圧動作によりモータ16を駆動することが可能となるので、燃料電池11のセル積層枚数を低減する等してその小型化を図ることも可能となる。その結果、車両1の重量を低減でき、その燃費向上を更に促進することができる。
In this way, by configuring the
ここで、燃料電池システム10においては、発電可能な燃料電池11がモータ16に対するメイン電力源となっている。従って、燃料電池システム10の効率を向上させるためには、燃料電池11とインバータ15との間に介在するFC昇圧コンバータ12での電力損失を低減することが、システム全体の効率向上に大きく寄与すると考えられる。もちろん、バッテリ13とインバータ15との間のバッテリ昇圧コンバータ14にも原則的に同様のことが当てはまる。
Here, in the
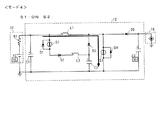
ここで、図2に基づいて、FC昇圧コンバータ12の電気回路の特徴について説明する。図2は、FC昇圧コンバータ12を中心として、燃料電池システム10の電気的構成を示す図であるが、説明を簡便にするためにバッテリ13およびバッテリ昇圧コンバータ14の記載は省略している。
Here, the characteristics of the electric circuit of the
FC昇圧コンバータ12は、DC−DCコンバータとしての昇圧動作を行うための主昇圧回路12aと、後述するソフトスイッチング動作を行うための補助回路12bとで構成されている。主昇圧回路12aは、スイッチ素子S1とダイオードD4で構成されるスイッチング回路のスイッチ動作によって、コイルL1に蓄えられたエネルギをモータ16側(インバータ15側)にダイオードD5を介して解放することで燃料電池11の出力電圧を昇圧する。具体的には、コイルL1の一端が燃料電池11の高電位側の端子に接続される。そして、スイッチ素子S1の一端の極が、コイルL1の他端に接続されるとともに、該スイッチ素子S1の他端の極が、燃料電池の低電位側の端子に接続されている。また、ダイオードD5のカソード端子がコイルL1の他端に接続され、更に、コンデンサC3が、ダイオードD5のアノード端子とスイッチ素子S1の他端との間に接続されている。尚、この主昇圧回路12aにおいて、コンデンサC3は、昇圧電圧の平滑コンデンサとして機能する。尚、主昇圧回路12aには、燃料電池11側に平滑コンデンサC1も設けられ、これにより燃料電池11の出力電流のリップルを低減することが可能となる。この平滑コンデンサC3にかかる電圧VHは、FC昇圧コンバータ12の出口電圧となる。また、図2では、燃料電池11の電源電圧をVLで示し、これは平滑コンデンサC1にかかる電圧であって、且つFC昇圧コンバータ12の入口電圧となる。
The
次に、補助回路12bには、先ずスイッチ素子S1に並列に接続された、ダイオードD3と、それに直列に接続されたスナバコンデンサC2とを含む第一直列接続体が含まれる。この第一直列接続体では、ダイオードD3のカソード端子がコイルL1の他端に接続され、そのアノード端子がスナバコンデンサC2の一端に接続されている。更に、該スナバコンデンサC2の他端は、燃料電池11の低電位側の端子に接続されている。更に、補助回路12bには、誘導素子であるコイルL2と、ダイオードD2と、スイッチ素子S2及びダイオードD1で構成されるスイッチング回路とが直列に接続された第二直列接続体が含まれる。この第二直列接続体では、コイルL2の一端が、第一直列接続体のダイオードD3とスナバコンデンサC2との接続部位に接続される。更に、ダイオードD2のカソード端子が、コイルL2の他端に接続されるとともに、そのアノード端子が、スイッチ素子S2の一端の極に接続される。また、スイッチ素子S2の他端は、コイルL1の一端側に
接続される。尚、この第二直列接続体の回路トポロジーについては、コイルL2、ダイオードD2、スイッチ素子S2等によるスイッチング回路の直列順序は、適宜入れ替えた形態も採用し得る。特に、図2に示す状態に代えて、コイルL2とスイッチ素子S2等によるスイッチング回路の順序を入れ替えることで、実際の実装回路ではコイルL1とコイルL2は一体化でき、半導体素子のモジュール化が容易となる。
Next, the
このように構成されるFC昇圧コンバータ12は、スイッチ素子S1のスイッチングデューティ比を調整することで、FC昇圧コンバータ12による昇圧比、即ちFC昇圧コンバータ12に入力される燃料電池11の出力電圧に対する、インバータ15にかけられるFC昇圧コンバータ12の出力電圧の比が制御される。また、このスイッチ素子S1のスイッチング動作において補助回路12bのスイッチ素子S2のスイッチング動作を介在させることで、後述するいわゆるソフトスイッチングが実現され、FC昇圧コンバータ12でのスイッチングロスを大きく低減させることが可能となる。
The
次に、FC昇圧コンバータ12におけるソフトスイッチングについて、図3、4A〜4Fに基づいて説明する。図3は、ソフトスイッチング動作を介したFC昇圧コンバータ12での昇圧のための一サイクルの処理(以下、「ソフトスイッチング処理」という。)のフローチャートである。当該ソフトスイッチング処理は、S101〜S106の各処理がECU20によって順次行われて一サイクルを形成するが、各処理によるFC昇圧コンバータ12での電流、電圧の流れるモードをそれぞれモード1〜モード6として表現し、その状態を図4A〜4Fに示す。以下、これらの図に基づいて、FC昇圧コンバータ12でのソフトスイッチング処理について説明する。尚、図4A〜図4Fにおいては、図面の表示を簡潔にするため、主昇圧回路12aと補助回路12bの参照番号の記載は省略しているが、各モードの説明においては、各回路を引用する場合がある。また、各図中、太矢印で示されるのは、回路を流れる電流を意味している。
Next, soft switching in the
尚、図3に示すソフトスイッチング処理が行われる初期状態は、燃料電池11からインバータ15およびモータ16に電力が供給されている状態、即ちスイッチ素子S1、S2がともにターンオフされることで、コイルL1、ダイオードD5を介して電流がインバータ15側に流れている状態である。従って、当該ソフトスイッチング処理の一サイクルが終了すると、この初期状態と同質の状態に至ることになる。
The initial state in which the soft switching process shown in FIG. 3 is performed is a state where electric power is supplied from the
ソフトスイッチング処理において、先ずS101では図4Aに示されるモード1の電流・電圧状態が形成される。具体的には、スイッチ素子S1はターンオフの状態でスイッチ素子S2をターンオンする。このようにすると、FC昇圧コンバータ12の出口電圧VHと入口電圧VLの電位差によって、コイルL1及びダイオードD5を介してインバータ15側に流れていた電流が、補助回路12b側に徐々に移行していく。尚、図4A中には、その電流の移行の様子を白抜き矢印で示している。
In the soft switching process, first, in S101, the current / voltage state of
次に、S102では、S101の状態が所定時間継続すると、ダイオードD5を流れる電流がゼロとなり、代わってスナバコンデンサC2と燃料電池11の電圧VLとの電位差により、スナバコンデンサC2に蓄電されていた電荷が補助回路12b側に流れ込んでいく(図4Bに示すモード2の状態)。このスナバコンデンサC2は、スイッチ素子S1にかかる電圧を決定する機能を有している。スイッチ素子S1をターンオンするときに該スイッチ素子S1に印加される電圧に影響を与えるスナバコンデンサC2の電荷が、モード2では補助回路12bに流れ込むことで、スナバコンデンサC2にかかる電圧が低下していく。このとき、コイルL2とスナバコンデンサC2の半波共振により、スナバコンデンサC2の電圧がゼロとなるまで、電流は流れ続ける。この結果、後述するS103でのスイッチ素子S1のターンオン時のその印加電圧を下げることが可能となる。
Next, in S102, when the state of S101 continues for a predetermined time, the current flowing through the diode D5 becomes zero, and instead, the electric charge stored in the snubber capacitor C2 due to the potential difference between the snubber capacitor C2 and the voltage VL of the
更に、S103においては、スナバコンデンサC2の電荷が抜け切ったら、スイッチ素子S1が更にターンオンされ、図4Cに示されるモード3の電流・電圧状態が形成される。即ち、スナバコンデンサC2の電圧がゼロとなった状態ではスイッチ素子S1にかかる電圧もゼロとなり、そして、その状態でスイッチ素子S1をターンオンすることにより、スイッチ素子S1をゼロ電圧状態にした上でそこに電流を流し始めることになるため、スイッチ素子S1におけるスイッチング損失を理論上、ゼロとすることができる。 Further, in S103, when the electric charge of the snubber capacitor C2 is completely discharged, the switch element S1 is further turned on, and the mode 3 current / voltage state shown in FIG. 4C is formed. That is, when the voltage of the snubber capacitor C2 is zero, the voltage applied to the switch element S1 is also zero, and the switch element S1 is turned on in that state to bring the switch element S1 to the zero voltage state. Therefore, the switching loss in the switch element S1 can theoretically be zero.
そして、S104では、S103の状態が継続することで、コイルL1に流れ込んでいく電流量を増加させて、コイルL1に蓄えられるエネルギを徐々に増やしていく。この状態が、図4Dに示されるモード4の電流・電圧状態である。その後、コイルL1に所望のエネルギが蓄えられると、S105において、スイッチ素子S1及びS2がターンオフされる。すると、上記モード2で電荷が抜かれて低電圧状態となっているスナバコンデンサC2に電荷が充電され、FC昇圧コンバータ12の出口電圧VHと同電圧に至る。この状態が、図4Eに示されるモード5の電流・電圧状態である。そして、スナバコンデンサC2が電圧VHまで充電されると、S106においてコイルL1に蓄えられたエネルギがインバータ15側に解放される。この状態が、図4Fに示されるモード6の電流・電圧状態である。尚、このモード5が行われるとき、スイッチ素子S1にかかる電圧はスナバコンデンサC2により電圧の立ち上がりを遅らせられるため、スイッチ素子S1におけるテール電流によるスイッチング損失をより小さくできる。
In S104, the state of S103 continues, increasing the amount of current flowing into the coil L1, and gradually increasing the energy stored in the coil L1. This state is the current / voltage state of mode 4 shown in FIG. 4D. Thereafter, when desired energy is stored in the coil L1, the switch elements S1 and S2 are turned off in S105. Then, the electric charge is extracted in the
上述のようにS101〜S106の処理を一サイクルとしてソフトスイッチング処理を行うことで、FC昇圧コンバータ12におけるスイッチング損失を可及的に抑制した上で、燃料電池11の出力電圧を昇圧しインバータ15に供給可能となる。その結果、高電圧低電流モータであるモータ16を効率的に駆動することが可能となる。
As described above, the soft switching process is performed with the processes of S101 to S106 as one cycle, so that the switching loss in the
ここで、燃料電池システム10においては、上記ソフトスイッチング処理に加えて、FC昇圧コンバータ12の間欠運転制御を行うことで、システム効率を向上させる。説明を簡潔にするために、燃料電池11とインバータ15及びモータ16との関係に着目すると、モータ16に対するメイン電力源である燃料電池11からの電力は、FC昇圧コンバータ12を介してインバータ15側へ供給される。そして、メイン電力源である燃料電池11がモータ16の駆動に際してインバータ15に印加すべき電圧は、モータ16の逆起電力に十分に抵抗できる電圧でなければならない。従って、上記FC昇圧コンバータ12が備えられていない従来の燃料電池システムでは、図5に示すように、車両1の採り得る速度範囲(0〜VSmax)において、LV1で示される燃料電池によって印加される電圧が、常にモータ駆動に必要な、インバータ15に印加すべき電圧(以下、「モータ必要電圧」という。)を超えた状態としなければならない。そのため、インバータに印加されるべき電圧を大きく超えた電圧がインバータに印加されることになり、インバータのスイッチング損失が大きくなっていた。そして、特に車両1の速度が低い領域では、インバータのスイッチング損失が顕著となり得る。
Here, in the
ここで、本発明に係る燃料電池システム10では、FC昇圧コンバータ12が設けられているため、燃料電池11からの電圧を昇圧してインバータ15に印加することは可能である。しかし、このFC昇圧コンバータ12による昇圧動作では、スイッチ素子による何らかのスイッチング損失が発生するため、当該昇圧動作はシステムの効率を低下させる一因となる。一方で、上述したように、モータ16は高電圧低電流仕様のモータであるため、その回転数の上昇に伴い発生する逆起電圧も大きくなっていき、FC昇圧コンバータ12による昇圧動作は不可欠となる。
Here, since the
そこで、燃料電池11からの出力電圧とインバータ15に印加すべきモータ必要電圧の相関を、図6においてそれぞれLV1、LV2で示す。図6のLV2で示すように、モー
タ16の逆起電圧は、車両1の速度が上昇していくに従い、増加していくため、モータ必要電圧も車両速度の増加とともに増加していく。ここで、燃料電池11の出力電圧LV1とモータ必要電圧LV2との相関において、両者が交差するときの車両1の速度VS0が、ユーザによる車両1の通常操縦を概ね賄う速度となるように、燃料電池11の電圧特性とモータ16の電圧特性とを決定すればよい。本実施例においては、車両運転法規やユーザの通常操縦の傾向等から、VS0を110km/hと設定する。そして、この速度VS0での車両1の走行を可能とするモータ16の駆動時の最大出力を算出し、当該最大出力の発揮が可能となるように、インバータ15に印加すべき電圧(モータ必要電圧)を導出する。そして、このモータ必要電圧が、FC昇圧コンバータ12を介さずに燃料電池11から直接に出力可能となるように、燃料電池11の設計(例えば、複数のセルが積層されて形成される燃料電池では、その積層セル数が調整される等)が行われる。
Therefore, the correlation between the output voltage from the
このように設計された燃料電池11を含む燃料電池システム10では、車両1の速度がVS0に至るまでの間は、燃料電池11からの出力電圧が、モータ16を駆動するためのモータ必要電圧よりも高いため、たとえモータ16が高電圧低電流仕様のモータであっても、FC昇圧コンバータ12の昇圧動作が無くとも燃料電池11からの直接の出力電圧によって該モータ16を駆動することが可能となる。換言すると、この条件下では、FC昇圧コンバータ12によるスイッチング動作を停止させて、燃料電池11からの出力電圧をインバータ15に印加することで、モータ16の駆動を確保できることになる。これにより、FC昇圧コンバータ12でのスイッチング損失を、完全に排除することができる。更には、FC昇圧コンバータ12が停止することでインバータ15に印加される電圧が過度に高くならないため、即ち、図5に示す状態よりもLV1とLV2との電圧差を小さくする抑えることができるため、インバータ15でのスイッチング損失を低く抑えることができる。
In the
一方で、車両1の車両速度がVS0以上となると、逆にモータ16を駆動するためのモータ必要電圧が、燃料電池11からの出力電圧よりも高くなるため、FC昇圧コンバータ12による昇圧動作が必要となる。この場合、上述したソフトスイッチング処理を行うことで、FC昇圧コンバータ12でのスイッチング損失を可及的に抑えることが可能となる。
On the other hand, when the vehicle speed of the
上記までは、説明の簡便化のために、燃料電池11とモータ16との相関にのみ着目しているが、図1に示すように燃料電池システム1においては、モータ16に対してバッテリ13からの電力供給も可能である。バッテリ13から電力供給される場合は、バッテリ13からの出力電圧がバッテリ昇圧コンバータ14によって昇圧された上で、インバータ15に印加されることになる。ここで、バッテリ昇圧コンバータ14は、いわゆる昇圧コンバータであるため、バッテリ13からインバータ15に電力供給を行うためには、バッテリ昇圧コンバータ14の出口電圧(インバータ15側の電圧であり、FC昇圧コンバータ12の出口電圧と同等)が、その入口電圧(バッテリ13側の電圧)と比較して同じか、又はより高い状態でなければならない。
Up to the above, only the correlation between the
そこで、バッテリ13の出力電圧と燃料電池11の出力電圧の相関について、図7Aおよび図7Bに基づいて説明する。両図では、ともにバッテリ13のIV特性(図中、点線LBTで示される。)と、燃料電池11のIV特性(図中、実線LFCで示される。)とが示されている。ここで、図7Aで、燃料電池11のIV特性LFCがバッテリ13のIV特性LBTより高い領域においては、FC昇圧コンバータ12を停止させたとしてもバッテリ13の出力電圧がFC昇圧コンバータ12の出口電圧より低い状態となるので、バッテリ昇圧コンバータ14が昇圧動作可能となり、以てバッテリ13からモータ16への電力供給ができる。従って、この状態ではFC昇圧コンバータ12の動作停止が許容される。一方で、バッテリ13のIV特性LBTが、燃料電池11のIV特性LFCより高い
領域においては、FC昇圧コンバータ12を停止させるとバッテリ13の出力電圧がFC昇圧コンバータ12の出口電圧より高い状態となるので、バッテリ昇圧コンバータ14の昇圧動作による燃料電池11とバッテリ13の出力分配制御が不可能となる。従って、この状態ではFC昇圧コンバータ12の動作停止が許容されない。
Therefore, the correlation between the output voltage of the
即ち、バッテリ昇圧コンバータ14によってバッテリ13からの出力電圧を昇圧して、モータ16に電圧を印加する場合には、FC昇圧コンバータ12の出口電圧が、バッテリ13の出力電圧(バッテリ昇圧コンバータ14の入口電圧)より高い状態を形成する必要があり、そのためにFC昇圧コンバータ12の動作停止が許容されない場合がある。例えば、図7Aに示すように、比較的低電流領域で、燃料電池11のIV特性LFCがバッテリ13のIV特性LBTより低くなる場合には、バッテリ昇圧コンバータ14の昇圧動作を確保するために、FC昇圧コンバータ12の動作停止は許容されず、その結果、上述したスイッチング損失の低減を図る可能性が低下する。一方で、例えば、図7Bに示すように、燃料電池11のIV特性LFCがバッテリ13のIV特性LBTより常に上にある場合には、バッテリ昇圧コンバータ14の昇圧動作確保の観点から、FC昇圧コンバータ12の動作停止が制限されることはない。
That is, when boosting the output voltage from the
尚、上述までのバッテリ昇圧コンバータ14の昇圧動作確保に関するFC昇圧コンバータ12の動作制限は、図1に示す燃料電池システム10に含まれるバッテリ昇圧コンバータ14が昇圧型のコンバータ(即ち、降圧動作を行えないコンバータ)であることに起因する。従って、燃料電池システム10において、バッテリ昇圧コンバータ14に代えて、昇圧動作および降圧動作が可能な昇降圧型のコンバータを採用する場合は、FC昇圧コンバータ12は上記の動作制限に縛られることはなく、燃料電池11、バッテリ13からの出力電圧を選択的にモータ16に印加できる。
The operation limitation of the
以上より、本実施例においては、想定される車両1の駆動に基づいて必要なバッテリ13のIV特性と燃料電池11のIV特性を決定し、両IV特性の相関および燃料電池11の出力電圧とモータ必要電圧との関係から、図8Aおよび図8Bのマップに示すようなFC昇圧コンバータ12の昇圧動作のための制御領域を画定した。以下に、FC昇圧コンバータ12の昇圧動作について、詳細に説明する。
As described above, in this embodiment, the necessary IV characteristics of the
図8Aおよび図8Bは、FC昇圧コンバータ12の入口電圧を横軸とし、その出口電圧を縦軸として形成される動作領域に対して、該FC昇圧コンバータ12において実行される処理を関連付けて表示したマップである。尚、図8Aは、燃料電池システム10に含まれるバッテリ昇圧コンバータ14が昇圧型のコンバータであるときのマップであり、図8Bは、該昇圧型のバッテリ昇圧コンバータ14に代えて、昇降圧型のコンバータを採用したときのマップである。先ず、図8Aに示すマップについて説明する。ここで、当該マップには、FC昇圧コンバータ12による昇圧比が1であること、即ち該入口電圧と該出口電圧との比が1:1であることを意味する直線LR1と、その昇圧比が2近傍の値(図中では、昇圧比を単に「2」と示す。)であることを意味する直線LR2と、その昇圧比が10であることを意味する直線LR3と、該FC昇圧コンバータ12の最高出力電圧を意味する直線LR4が記載されている。直線LR2については、図9、図10A、10Bに基づいて後述する。また、直線LR3は、FC昇圧コンバータ12による最大昇圧比を示している。従って、FC昇圧コンバータ12の動作範囲は、直線LR1、LR3、LR4で囲まれる領域であることが分かる。
8A and 8B show the processing executed in the
ここで、車両1の想定速度範囲で、最もモータ16にかかる負荷が低い場合、即ち道路の摩擦抵抗程度の負荷がかかる場合(図中、負荷率=R/L (Road Load))のFC昇圧コンバータ12の入口電圧とその出口電圧との関係が、一点鎖線LL1で示されている。一方で、同じように車両1の想定速度範囲で、最もモータ16にかかる負荷が高い場合、即
ち車両1のアクセル開度が100%である場合(図中、負荷率=100%)のFC昇圧コンバー
タ12の入口電圧とその出口電圧との関係が、一点鎖線LL2で示されている。従って、車両1に搭載される燃料電池システム10は、車両1を駆動させるという観点からは、一点鎖線LL1とLL2とで挟まれた領域で示される昇圧動作を、FC昇圧コンバータ12に行わせることになる。
Here, in the assumed speed range of the
図8Aに示すマップでは、FC昇圧コンバータ12の動作領域をRC1〜RC4の4つの領域に区分している。これらの領域では、それぞれFC昇圧コンバータ12の動作に関し特徴的な動作が行われ、以下に各領域でのFC昇圧コンバータ12の動作を説明する。先ず、昇圧比1を示す直線LR1以下の領域として、領域RC1が画定されている。この領域RC1では、モータ16を駆動するために必要とされる昇圧比が1以下であるので(現実にはFC昇圧コンバータ12は昇圧コンバータであるので、昇圧比を1以下にすること、即ち降圧はできないことに注意されたい。)、結果的にはFC昇圧コンバータ12を停止させて、燃料電池11の出力電圧を直接インバータ15に印加することが可能となる。そこで、FC昇圧コンバータ12の入口電圧となる燃料電池11の出力電圧が、燃料電池11の最大電圧のVfcmaxと、バッテリ13の開放電圧(OCV: Open Circuit Voltage)と同値のVfcbとの間の範囲であって、且つ直線LR1および一点鎖線LL1とで
囲まれて画定される領域RC1においては、FC昇圧コンバータ12の昇圧動作を完全に停止させる。これにより、FC昇圧コンバータ12におけるスイッチング損失を抑えることが可能となる。このように、電圧Vfcbを境界としてFC昇圧コンバータ12の動作停止が制約を受けるのは、上述の通りバッテリ昇圧コンバータ14が昇圧型のコンバータでありその昇圧動作確保のためである。
In the map shown in FIG. 8A, the operation region of the
次に、領域RC2について説明する。この領域は、FC昇圧コンバータ12の入口電圧が上記のVfcb以下であって、且つ該FC昇圧コンバータ12の出口電圧がバッテリ13のOCV以下、即ちVfcbと同値の電圧以下である領域として画定される。即ち、この領域RC2においては、FC昇圧コンバータ12の昇圧動作を行わないとバッテリ昇圧コンバータ14の出口電圧が入口電圧より低くなり該バッテリ昇圧コンバータ14の昇圧動作が不可能となる領域であり、また仮にFC昇圧コンバータ12の昇圧動作を行ったとしても、その昇圧比が低いため同様にバッテリ昇圧コンバータ14の昇圧動作が不可能となる領域でもある。
Next, the region RC2 will be described. This region is defined as a region where the inlet voltage of the
このように画定される領域RC2では、領域RC1と同様に、FC昇圧コンバータ12を停止させて、そのスイッチング損失が発生しないようにする。そして、バッテリ昇圧コンバータ14にて制御可能な最低電圧に燃料電池11の端子電圧を制御する。尚、図では、理想的な昇圧コンバータを使用した場合にその電圧はバッテリ13のOCVに等しいと仮定して、上記Vfcbを設定している。この状態は、バッテリ13の放電電力が許す限り継続される。
In the region RC2 defined in this way, the
尚、この領域RC2は、モータ16の駆動状態が変遷する中で、FC昇圧コンバータ12の動作領域が上記領域RC1から、後述する領域RC3に移行する際に介在する過渡的な領域である。従って、バッテリ昇圧コンバータ14が昇圧型のコンバータである場合には、この過渡的な領域RC2が可能な限り小さくなるように、図7A、7Bに基づいて説明した燃料電池11のIV特性とバッテリ13のIV特性との相関を適切に調整するのが好ましい。
This region RC2 is a transitional region that is interposed when the operation region of the
ここで、直線LR1より下の領域に関して、図8Bに示すマップ、即ち燃料電池システム10においてバッテリ昇圧コンバータ14に代えて昇降圧型のコンバータが採用されたときのマップについて説明する。この場合、昇降圧型のコンバータによってバッテリ13の出力電圧を降圧することが可能であるから、上述したようにFC昇圧コンバータ12の
動作停止について上記電圧Vfcbによる制約を受けることがなくなる。従って、図8Bに示すように、直線LR1よりも下の領域については、FC昇圧コンバータ12の動作を制約無く停止しシステムの効率を向上させることが容易となる。従って、この結果、図8Bにおいては上記領域RC2に相当する領域が存在しないことになる。ここで、以下に示すマップの説明は、図8Aおよび図8Bに共通に当てはまるため、その説明はまとめて行う。
Here, regarding the region below the straight line LR1, the map shown in FIG. 8B, that is, the map when the step-up / step-down converter is employed instead of the
上述までの領域RC1、RC2以外の動作領域では、FC昇圧コンバータ12を駆動させて、燃料電池11の出力電圧の昇圧動作を行うことになる。この昇圧動作においては、図4A〜4Fに基づいて説明したソフトスイッチング処理が実行されることで、FC昇圧コンバータ12でのスイッチング損失を可及的に抑制する。ここで、このソフトスイッチング処理が行われる動作領域は、直線LR2で準ソフトスイッチ領域RC3とソフトスイッチ領域RC4とに区分けされる。以下に、準ソフトスイッチ領域RC3とソフトスイッチ領域RC4とについて、詳細に説明する。
In the operation region other than the regions RC1 and RC2 described above, the
先ず、直線LR2の技術的意義について説明する。上述したように、直線LR2は、FC昇圧コンバータ12による昇圧比が2近傍の値となることを意味する直線である。本発明に係るFC昇圧コンバータ12の電気的構造は、図2に示すとおりであるが、上述したソフトスイッチング処理の一連のフローにおけるモード2の動作において、補助回路12bのコイルL2とスナバコンデンサC2による半波共振を利用したスナバコンデンサC2の放電が行われる。このモード2の動作においてFC昇圧コンバータ12内で実際に稼動している部分のみを抜き出すと、図9に示す回路構成となる。
First, the technical significance of the straight line LR2 will be described. As described above, the straight line LR2 is a straight line that means that the boost ratio by the
そして、図9に示す回路構成において、スナバコンデンサC2内に充電されている電荷を完全に放電しなければ、その後のモード3の動作で、スイッチ素子S1に電圧がかかった状態で、スイッチ素子S1のターンオンによる電流が流れるため、結果としてスイッチング損失が発生することになる。従って、このモード2におけるスナバコンデンサC2の電荷を完全に放電することが重要であることが理解されるが、そのためにはモード1の動作時点でコイルL2に蓄えられているエネルギがスナバコンデンサC2に蓄えられているエネルギよりも大きくなければならない。換言すると、FC昇圧コンバータ12の出口電圧VHが、その入口電圧VLよりも所定量以上高くならなければならない。
In the circuit configuration shown in FIG. 9, unless the electric charge charged in the snubber capacitor C2 is completely discharged, the switch element S1 is in a state where a voltage is applied to the switch element S1 in the subsequent operation of mode 3. As a result, a current is generated due to the turn-on, resulting in a switching loss. Therefore, it is understood that it is important to completely discharge the electric charge of the snubber capacitor C2 in this
そこで、該出口電圧と該入口電圧との比VH/VLと、上記放電時のスナバコンデンサC2に残る電圧との関係を、図10Aおよび10Bに基づいて説明する。尚、図10Aが比VH/VLが2を超える場合のスナバコンデンサC2の電圧推移を示し、図10Bが比VH/VLが2未満の場合のスナバコンデンサC2の電圧推移を示している。図10Aに示す場合は、VH−VLの値はVLよりも大きくなるため、半波共振が生じるとスナバコンデンサC2の電圧は、ダイオードD2の作用もありゼロとなる。一方で、図10Bに示す場合では、VH−VLの値はVLよりも小さくなるため、半波共振が生じたとしてもスナバコンデンサC2の電圧は、一定値以上残ることになる。従って、このような場合に上記ソフトスイッチング処理を行っても幾分かのスイッチング損失が発生することになる。以上より、ソフトスイッチング処理によるスイッチング損失の抑制が効果的に行われ得るか否かを判断する基準として、直線LR2が存在することになる。 Therefore, the relationship between the ratio VH / VL between the outlet voltage and the inlet voltage and the voltage remaining in the snubber capacitor C2 during the discharge will be described with reference to FIGS. 10A and 10B. 10A shows the voltage transition of the snubber capacitor C2 when the ratio VH / VL exceeds 2, and FIG. 10B shows the voltage transition of the snubber capacitor C2 when the ratio VH / VL is less than 2. In the case shown in FIG. 10A, the value of VH−VL becomes larger than VL. Therefore, when half-wave resonance occurs, the voltage of the snubber capacitor C2 becomes zero due to the action of the diode D2. On the other hand, in the case shown in FIG. 10B, since the value of VH−VL is smaller than VL, even if half-wave resonance occurs, the voltage of the snubber capacitor C2 remains above a certain value. Therefore, in such a case, even if the soft switching process is performed, some switching loss occurs. As described above, the straight line LR2 exists as a reference for determining whether or not the switching loss can be effectively suppressed by the soft switching process.
尚、理論的には比VH/VLが2倍以上あれば、放電後のスナバコンデンサC2の電圧はゼロとなるが、実際にはダイオードや配線内でのエネルギ損失が発生するため、比VH/VLは2倍を超える値(例えば、2.3等)が好ましい。そして、一点鎖線LL1とLL2で挟まれた動作領域中、領域RC1、RC2を除いた領域を、直線LR2が二つに分割し、直線LR2より下に位置する領域を、上記理由によりソフトスイッチング処理を行ってもスイッチング損失を効率的に抑制するのが難しい準ソフトスイッチ領域RC3とし
、直線LR2より上に位置する領域を、ソフトスイッチング処理によるスイッチング損失の抑制が効率的に行われるソフトスイッチ領域RC4とする。
Theoretically, if the ratio VH / VL is twice or more, the voltage of the snubber capacitor C2 after discharge becomes zero, but in reality, energy loss occurs in the diode and the wiring, so the ratio VH / VL The value of VL is preferably more than twice (for example, 2.3). Then, in the operation region sandwiched between the alternate long and short dash lines LL1 and LL2, the region excluding the regions RC1 and RC2 is divided into two by the straight line LR2, and the region located below the straight line LR2 is subjected to the soft switching process. The quasi-soft switch region RC3 in which it is difficult to efficiently suppress the switching loss even if the switching is performed, and the region located above the straight line LR2 is the soft switch region RC4 in which the switching loss is efficiently suppressed by the soft switching process. And
このように、FC昇圧コンバータ12の動作領域は、所定の領域RC1〜RC4に区分けできるが、準ソフトスイッチ領域RC3では、上述したようにFC昇圧コンバータ12のスイッチング損失を十分に抑制することができないため、燃料電池システム10の効率化の観点から、この領域でFC昇圧コンバータ12が昇圧動作を行うことは可及的に回避するが好ましい。そこで、燃料電池システム10の効率化を促進するための、FC昇圧コンバータ12の制御の一例について、図11に基づいて説明する。図11に示すFC昇圧コンバータ制御は、ECU20によって、燃料電池11で発電された電力がモータ16に供給されるときに実行される。尚、上記準ソフトスイッチ領域RC3における昇圧動作については、燃料電池システム10のより良い効率のために可及的に回避することが好ましいのは上述の通りであるが、本発明に係る燃料電池システム10は当該昇圧動作を完全に排除するものではなく、必要に応じて当該昇圧動作を利用してもよい。
As described above, the operation region of the
先ず、S201では、エンコーダによって検出されたモータ16の実際の回転数に対応する、該モータ16が最大出力し得る最大トルクを算出する。具体的には、モータ16の回転数とそれに対応した最大トルクとが関連付けられているマップをECU20が有しており、検出された回転数に従って該マップにアクセスすることでモータ16の最大トルクが算出される。S201の処理が終了すると、S202へ進む。
First, in S201, the maximum torque that the
S202では、アクセルペダルセンサ21によって検出されたアクセルペダルの開度に基づいて、モータ16に出力要求されている要求トルクが算出される。アクセルペダルの全開が、モータ16の現時点での回転数における最大トルクを要求していると定義すると、全開時の係数を100%、全閉時の係数を0%として、以下の式に従って要求トルクが算出される。S202の処理が終了すると、S203へ進む。
(要求トルク)=(上記最大トルク)×(アクセルペダルの開度に応じた係数)
In S202, the required torque requested to be output to the
(Required torque) = (Maximum torque) x (Coefficient according to accelerator pedal opening)
S203では、S201とS202での算出結果に基づいて、モータ16に要求されている出力である要求出力が、以下の式に従って算出される。S203の処理が終了すると、S204へ進む。
(要求出力)=(要求トルク)×(モータの回転数)
In S203, based on the calculation results in S201 and S202, a required output that is an output required for the
(Request output) = (Request torque) x (Motor speed)
S204では、S203で算出された要求出力とモータ16の回転数に基づいて、必要な電力がモータ16に供給されるように、インバータ15に印加されるべき電圧であるモータ必要電圧(Vmot)が算出される。具体的には、モータ16の回転数(rpm)と上記要求出力(P)で形成される関数Fと、モータ必要電圧とが関連付けられているモータ必要電圧マップをECU20が有しており、モータの回転数と要求出力とに従ってこのマップにアクセスすることで、モータ必要電圧が算出される。モータ必要電圧マップは、実験等によって予め決定され得るもので、その一例としては、モータ16の回転数が高くなるに従いその逆起電圧が高くなるため要求電圧値は高くなるべきであり、要求出力が高くなるとその出力をより少ない電流で達成するために要求電圧値は高くなるべきであるので、これらの点が関数Fとモータ必要電圧との相関に反映されている。S204の処理が終了すると、S205へ進む。S204の処理を実行するECU20が、要求電圧を算出する手段に相当する。
In S204, the required motor voltage (Vmot), which is a voltage to be applied to the
S205では、アクセルペダルセンサ21によって検出されたアクセルペダルの開度に従って発電が行われている燃料電池11の出力電圧(Vfc)が検出される。この検出は、図示されない電圧センサを介して行われる。S205の処理が終了すると、S206へ進む。S206では、S204で算出されたモータ必要電圧を、S205で検出された燃
料電池11の出力電圧で除して暫定昇圧比Rt(=Vmot/Vfc)が算出される。S206の処理が終了すると、S207へ進む。
In S205, the output voltage (Vfc) of the
S207では、FC昇圧コンバータ12を停止させることが可能か否かが判定される。即ち、FC昇圧コンバータ12の動作領域が、上記領域RC1もしくはRC2の何れかに属するか否かが判定される。具体的には、S206で算出された暫定昇圧比が1未満で、且つ燃料電池11の出力電圧がVfcmaxとVfcbの間であるときは、FC昇圧コンバータ12の動作領域はRC1であり、また燃料電池11の出力電圧がVfcb以下であって且つ該FC昇圧コンバータ12の出口側電圧がVfcbと同値の電圧以下であるときは、FC昇圧コンバータ12の動作領域はRC2であると判定される。尚、Vfcb、Vfcmaxの値は、実際の燃料電池11およびバッテリ13の仕様に従って予め決定しておけばよい。また、FC昇圧コンバータ12の出口側の電圧は、図示されない電圧センサを介して検出される。
In S207, it is determined whether or not the
そして、S207で肯定判定される場合は、S208へ進み、FC昇圧コンバータ12が停止され、燃料電池11からの出力電圧は、インバータ15に直接印加される。これにより、FC昇圧コンバータ12でのスイッチング損失を抑制することができる。尚、上述したように、FC昇圧コンバータ12の動作領域がRC1に属する場合には、バッテリ13からインバータ15への昇圧後の印加も可能だが、該動作領域がRC2に属する場合には、バッテリ昇圧コンバータ14にて制御可能な最低電圧に燃料電池11の端子電圧を制御する。一方で、S207で否定判定されると、S209へ進む。
If the determination in step S207 is affirmative, the process proceeds to step S208, where the
S209では、S206で算出された暫定昇圧比Rtが2を超えるか否かが判定される。即ち、FC昇圧コンバータ12の動作領域がソフトスイッチ領域RC4にあるか、準ソフトスイッチ領域RC3にあるかが判定される。S209で肯定判定されると、FC昇圧コンバータ12の動作領域がソフトスイッチ領域RC4にあることを意味するのでS210へ進み、FC昇圧コンバータ12の目標の出力電圧がモータ必要電圧Vmotとなるように図3で示したソフトスイッチング処理が実行される。尚、スイッチ素子S1のデューティ比は、暫定昇圧比Rtに従って決定される。一方で、S209で否定判定されると、FC昇圧コンバータ12の動作領域が準ソフトスイッチ領域RC3にあることを意味する。そこでこの場合はS211に進む。
In S209, it is determined whether or not the provisional boost ratio Rt calculated in S206 exceeds 2. That is, it is determined whether the operation region of the
S211では、燃料電池システム10においてS206で算出された暫定昇圧比Rtによる電圧昇圧に加えて、更に追加的な電圧昇圧(以下、単に「追加的電圧昇圧」という。)が許容されるか否かが判定される。言い換えると、S209で否定判定されるということは、FC昇圧コンバータ12の動作領域が現時点では準ソフトスイッチ領域RC3にあることを意味するので、その動作領域をソフトスイッチ領域RC4に移行することが可能か否かが判定される。即ち、当該動作領域を準ソフトスイッチ領域RC3からソフトスイッチ領域RC4に移行させるために追加的電圧昇圧を行おうとすると、インバータ15に印加される電圧が必要なモータ必要電圧よりも高くなる。その結果、インバータ15内でのスイッチング損失が大きくはなるが、FC昇圧コンバータ12のスイッチング損失の減少分と、インバータ15のスイッチングロスの増加分とを比較したとき、前者の減少分が大きい場合もあり得、その場合この追加的電圧昇圧は、システム効率の観点から非常に有用である。そこで、S211では、この追加的電圧昇圧が許容されるか否かが判定されることになる。S211で肯定判定されると、S212へ進み、追加的電圧昇圧のための追加昇圧比Raが決定される。この追加昇圧比Raは、FC昇圧コンバータ12による最終的な昇圧比(Rt×Raによる昇圧比)が、直線LR2で決められる昇圧比(例えば、昇圧比2)を超えるようにするために必要な追加的な昇圧比である。そして、S212の処理後、S213へ進み、FC昇圧コンバータ12の目標の出力電圧が燃料電池11の出力電圧Vfcに昇圧比Rtと追加昇圧比Raを掛け合わせて算出される電圧となるように図
3で示したソフトスイッチング処理が実行される。尚、スイッチ素子S1のデューティ比は、暫定昇圧比Rtと追加昇圧比Raの積に従って決定される。
In S211, in addition to the voltage boost based on the temporary boost ratio Rt calculated in S206 in the
このように、S209で否定判定された時点では、本来的にはFC昇圧コンバータ12の動作領域は準ソフトスイッチ領域RC3であり、その状態でソフトスイッチング処理を行っても上述したように、スイッチング損失を十分に抑制することが困難である。この場合には、FC昇圧コンバータ12による昇圧比に上記追加昇圧比Raを考慮することで、本来的にモータ16の駆動に要する電圧よりも更に電圧を上げてFC昇圧コンバータ12の動作領域をソフトスイッチ領域RC4とする。その結果、スイッチング損失を効果的に抑制することが可能となる。
Thus, when the negative determination is made in S209, the operation region of the
一方で、S211で否定判定されると、S214へ進み、FC昇圧コンバータ12の動作領域がRC3の状態で、上記ソフトスイッチング処理が行われる。燃料電池11が上記追加的電圧昇圧が許容されない状態にあるとき、即ち上述のように電圧を追加的に昇圧させることでインバータ15におけるスイッチング損失が顕著になる状態では、S212及びS213の処理は行われない。
On the other hand, if a negative determination is made in S211, the process proceeds to S214, and the soft switching process is performed in a state where the operation region of the
この図11に示すFC昇圧コンバータ制御によれば、モータ16の駆動を確保することを前提に、FC昇圧コンバータ12の昇圧動作を可能な限り停止することができ、以てスイッチング損失を抑えることができる。また、FC昇圧コンバータ12を昇圧動作させる場合であっても、その動作領域を可能な限りソフトスイッチ領域RC4とした上でソフトスイッチング処理が行われるため、FC昇圧コンバータ12のスイッチング損失を可及的に抑制することが可能となる。
According to the FC boost converter control shown in FIG. 11, the boost operation of the
<高電位回避制御>
以下、燃料電池の高電位回避制御について説明する。燃料電池では、Pt触媒の表面での水(およびプロトンに対する)に対する酸化還元により、Pt触媒が凝集するシンタリング現象が誘発される場合がある。この酸化還元反応は、燃料電池セルの出力電圧が開放電圧(OCV)に近い、比較的高電位で引き起こされることが知られている。そこで、燃料電池システム10は、FC昇圧コンバータ12、あるいは、バッテリ昇圧コンバータ14を通じて、FC出力電圧を制御し、シンタリングの原因となる燃料電池の高電位での発電を抑制する。
<High potential avoidance control>
Hereinafter, the high potential avoidance control of the fuel cell will be described. In a fuel cell, a sintering phenomenon in which the Pt catalyst aggregates may be induced by redox against water (and against protons) on the surface of the Pt catalyst. It is known that this oxidation-reduction reaction is caused at a relatively high potential in which the output voltage of the fuel cell is close to the open circuit voltage (OCV). Therefore, the
図12に、FC昇圧コンバータ12を停止し、燃料電池11から直接電力を供給する場合の処理(図11のS208)の詳細を例示する。この処理では、ECU20は、燃料電池11の図示しない出力端子の出力電圧(以下、FC端子電圧という)を監視している(S2082)。なお、図12では、S2081の処理とS2082の処理とは、シリアルに実行されているが、これは、図面上の表現である。すなわち、S2082でのFC端子電圧の監視は、S2081を実行する処理と並行した処理(並行プロセス、マルチタスク)で実現すればよい。以下、他の監視処理も、同様に、基本的には、ECU20による他の制御とは並行して実行される。
FIG. 12 illustrates details of the process (S208 in FIG. 11) when the
そして、ECU20は、FC端子電圧が、基準値(Vfc_OCV_REF)に近づいたか否か
を判定する(S2083)。この場合、近づいたか否かは、FC端子電圧と基準値(Vfc
_OCV_REF)との差異が、許容値未満になったか否かで判定すればよい。また、この場合の基準値(Vfc_OCV_REF)とは、シンタリング現象を誘発するFCセルの酸化還元反応
電位をFCの端子電圧に換算した値である。換算は、例えば、実験的(または理論的)にFCセルの各酸化還元反応電位を求め、直列に接続されるFCセル数分加算した値を基に、安全率を反映して得られている。
Then, the
(_OCV_REF) may be determined based on whether or not the difference is less than the allowable value. The reference value (Vfc_OCV_REF) in this case is a value obtained by converting the oxidation-reduction reaction potential of the FC cell that induces the sintering phenomenon into the terminal voltage of the FC. The conversion is obtained, for example, by reflecting the safety factor based on a value obtained by experimentally (or theoretically) calculating each oxidation-reduction reaction potential of the FC cell and adding the number of FC cells connected in series. .
そして、FC端子電圧が、基準値(Vfc_OCV_REF)に近づいた場合には、ECU20
は、バッテリ昇圧コンバータ14の出力電圧を基準値(Vfc_OCV_REF)より小さくなる
ように維持する。図1のように、バッテリ昇圧コンバータ14の出力端子は、FC昇圧コンバータ12の出力端子と並列に、インバータ15に接続されている。また、FC昇圧コンバータ12は、停止しているため、直流的に、リアクトルを通じて、インバータ15に接続されている。したがって、バッテリ昇圧コンバータ14の出力電圧が、基準値(Vfc
_OCV_REF)よりも、小さくなるように維持することで、直接、FC端子電圧が基準値(Vfc_OCV_REF)より十分に小さく維持できる。
When the FC terminal voltage approaches the reference value (Vfc_OCV_REF), the
Maintains the output voltage of the
By keeping it smaller than (_OCV_REF), the FC terminal voltage can be directly kept sufficiently smaller than the reference value (Vfc_OCV_REF).
次に、ECU20は、FC昇圧コンバータ12に対して、再起動が要求されているか否かを判定する(S2083)。再起動が要求されているとは、図11のS207での判定条件が満たされなくなった場合をいう。例えば、FC昇圧コンバータ12に要求される暫定昇圧比が1以上となった場合である。
Next, the
FC昇圧コンバータ12に対して再起動が要求されていない場合には、ECU20は、制御をS2081に戻す。一方、FC昇圧コンバータ14に対して再起動が要求されている場合には、ECU20は、リターンする。
If the
以上述べたように、本実施形態の燃料電池システム10によれば、FC昇圧コンバータ12が停止可能な場合には、停止するとともに、FC端子電圧を監視する。そして、FC端子電圧がシンタリング現象を回避するための上限値である基準値(Vfc_OCV_REF)に
近づいた場合には、ECU20が、バッテリ昇圧コンバータ14を通じて、FCの端子電圧が、基準値(Vfc_OCV_REF)以下になるように制御する。これによって、FC昇圧コ
ンバータ12が停止中であっても、バッテリ昇圧コンバータ14により、FCの高電位状態を回避でき、シンタンリング現象の誘発を抑制できる。
As described above, according to the
<バッテリ昇圧コンバータ停止処理>
今、何らかの原因でバッテリ13の端子電圧が上昇した場合を考える。図1の構成では、FC昇圧コンバータ12、バッテリ昇圧コンバータ14ともに、昇圧コンバータを使用している。また、燃料電池11自体は、シンタリングを回避するための基準値(Vfc_OCV_REF)未満に制御する必要がある。
<Battery boost converter stop processing>
Consider a case where the terminal voltage of the
そのような条件で、さらに、何らかの理由でバッテリ13の端子電圧が上昇し、上記基準値(Vfc_OCV_REF)に近づいた場合を考える。何らかの理由とは、例えば、バッテリ
13のSOCが満充電に近づいた場合、バッテリが劣化した場合、バッテリが低温下に置かれた場合等で、バッテリの出力電圧が上昇した場合である。
Consider a case where the terminal voltage of the
この場合には、バッテリ昇圧コンバータ14の入力側(バッテリ13の端子側)と、出力側(インバータ15の入力側、FC昇圧コンバータの出力側)とで、昇圧比が1以下となる。したがって、この場合には、もはや、バッテリ昇圧コンバータ14の動作を継続できず、ECU20は、バッテリ昇圧コンバータ14を停止させる。そして、FC端子電圧を基準値(Vfc_OCV_REF)以下にする制御は、FC昇圧コンバータ12によって実行す
る。
In this case, the boost ratio is 1 or less on the input side of battery boost converter 14 (terminal side of battery 13) and on the output side (input side of
その場合のECU20による制御を図13に示す。この制御は、バッテリ昇圧コンバータ14の昇圧比(バッテリ13側の電圧に対するインバータ15側の電圧の比)が1以下のときに実行される。図13の処理は、例えば、図11のS210、S213、あるいは、S214の処理と並行して実行すればよい。
The control by ECU20 in that case is shown in FIG. This control is executed when the boost ratio of the battery boost converter 14 (ratio of the voltage on the
この処理では、ECU20は、バッテリ端子電圧を監視している(S2101)。なお
、この場合も、監視処理は、ECU20の制御と並行して実行すればい。そして、ECU20は、バッテリ端子電圧が、インバータ15の要求電圧以上か否かを判定する(S2102)。
In this process, the
バッテリ端子電圧が、インバータ15の要求電圧以上の場合、ECU20は、バッテリ昇圧コンバータを停止し、FC昇圧コンバータ12の制御を実行する(S2103)。すなわち、ECU20は、図11のS203、S204と同様の処理によって、ユーザ要求トルクおよびモータ回転数によって定まる、ユーザ要求出力およびモータ必要電圧を算出する。さらに、ECU20は、ユーザ要求出力から、バッテリ13にて出力すべきバッテリ要求出力(WB)を除外したFC要求出力(WF)を算出する。なお、バッテリ要求出力は、現在のSOCに対して、出力すべき電力を保持したマップを参照して決定すればよい。例えば、SOCが満充電に近い場合には、バッテリ要求出力は大きな値に設定される。一方、SOCが空き状態に近い場合には、バッテリ要求出力は小さな値に設定される。
When the battery terminal voltage is equal to or higher than the required voltage of the
また、ECU20は、出力電力(P)と出力電流(I)との関係を示すPIマップをメモリに保持している。ECU20は、PIマップを参照し、FC要求出力(WF)を達成するための燃料電池11の出力電流を決定する。さらに、ECU20は、燃料電池11のIV特性をマップとして保持している。ECU20は、IV特性から出力電流を出力するときの端子電圧(V)を決定する。そして、ECU20は、燃料電池11の端子電圧(V)とモータ必要電圧との関係から、FC昇圧コンバータ12の昇圧比を設定し、制御する。その結果、燃料電池11の端子電圧が、目標値に制御され、FC要求出力(WF)に相当する電力がFCからインバータ15に供給される。さらに、ユーザ要求出力に対する不足分であるバッテリ要求出力(WB)がバッテリ13からインバータ15に供給される。
Further, the
さらに、ECU20は、FC端子電圧を監視している(S2104)。そして、FC端子電圧が、上記基準値(Vfc_OCV_REF)に近づいたか否かを判定する(S2105)。
FC端子電圧が、上記基準値(Vfc_OCV_REF)に近づいた場合には、ECU20は、F
C昇圧コンバータ12によって、FC端子電圧を上記基準値(Vfc_OCV_REF)よりも小
さく低下する方向に制御する。
Further, the
When the FC terminal voltage approaches the reference value (Vfc_OCV_REF), the
The
この場合、バッテリ昇圧コンバータ14は、停止状態であり、バッテリ出力端子は、直流的にFC昇圧コンバータ12の出力側に接続されている。したがって、FC昇圧コンバータ12によって、FC端子電圧を上記基準値(Vfc_OCV_REF)よりも小さく低下する
方向に制御することによって、FC昇圧コンバータ12の出力端子側は、バッテリ13の端子電圧より低くなり得る。したがって、燃料電池11で発電された電力は、バッテリ13の充電には供給できない場合があり得る。この場合、燃料電池11で発電された電力は、第1には、インバータ15を通じて、モータ16に供給される。さらに、余剰の電力が発生した場合には、補機を通じて、余剰電力が消費されることになる。
In this case, the
以上述べたように、バッテリ13の端子電圧が何らかの理由で上昇した場合には、バッテリ昇圧コンバータ14を停止し、バッテリ端子電圧を直流的に、FC昇圧コンバータの出力側(インバータ15の入力側)に接続すればよい。そして、FC端子電圧を、シンタリングを回避するための基準値(Vfc_OCV_REF)より小さく制御すればよい。このよう
な制御によって、可能な限り効率を向上させた上で、燃料電池11でのシンタリング現象を低減できる。
As described above, when the terminal voltage of the
<FC昇圧コンバートとバッテリ昇圧コンバータの協調制御>
図12では、FC昇圧コンバータ12を停止した場合の燃料電池システム10の制御について説明した。また、図13では、バッテリ昇圧コンバータ14を停止した場合の燃料電池システム10の制御について説明した。ここでは、さらに、FC昇圧コンバータ12
とバッテリ昇圧コンバータ14とが協調して、システムの燃料効率の向上と、シンタリングの回避とを実現するための制御について説明する。
<Coordinated control of FC boost converter and battery boost converter>
In FIG. 12, the control of the
The control for realizing the improvement of the fuel efficiency of the system and the avoidance of the sintering in cooperation with the
FC昇圧コンバータ12とバッテリ昇圧コンバータ14とが稼働中の場合に、インバータ15の入力電圧は、例えば、バッテリ昇圧コンバータ14の昇圧比によって設定される。そして、FC昇圧コンバータ12の昇圧比を設定することによって、燃料電池11とバッテリ13との負担割合が決定され、インバータ15に電力が供給される。
When the
この場合、燃料電池11からインバータ15を通じてモータ16の逆起電圧に釣り合った出力電圧が、供給される。さらに、十分な電力がインバータ15に供給され、かつ、余剰の電力がある場合には、バッテリ昇圧コンバータを通じて、バッテリ13が充電されることになる。
In this case, an output voltage balanced with the counter electromotive voltage of the
しかし、バッテリのSOCが満充電に近く、バッテリ許容入力電力に余裕がない場合には、もはや、バッテリ13を充電できない。その場合、特に、モータ回転数が大きく、逆起電圧が高い一方、要求トルクが大きくない状態では、FC端子電圧とシンタリング現象回避のための基準値(Vfc_OCV_REF)との調整が問題となる。すなわち、通常通り、モ
ータ回転数と要求トルクにしたがって、FC昇圧コンバータ12を制御した場合、燃料電池11で発電された電力が消費されず、FC端子電圧が基準値(Vfc_OCV_REF)を越え
てしまう場合が生じ得る。そこで、ECU20は、特に、低負荷、かつ、高速回転に対応したシンタリング現象に至る高電位回避のための制御を実行する。
However, when the SOC of the battery is close to full charge and the battery allowable input power has no margin, the
図14に、FC昇圧コンバータ12とバッテリ昇圧コンバータ14との協調制御処理を示す。この制御は、S210、S213、S214等のソフトスイッチングと並行して実行される処理である。ただし、図14において、ソフトスイッチングは、省略されている。
FIG. 14 shows a cooperative control process between the
この処理では、ECU20は、バッテリSOCを監視している(S2111)。この監視処理も、ECU20の制御と並列して実行すればよい。そして、ECU20は、バッテリ13の充電許容電力が十分か否かを判定する(S2112)。この基準値は、バッテリ13の容量の限度として設定される。この判定は、例えば、バッテリの満充電容量に対する現在の充電量の比率を基に実行される。現在の充電量の比率は、例えば、バッテリ13の端子電圧を基にして、バッテリ端子電圧と、充電量の関係を示すマップを参照して決定される。この処理を実行するECU20とバッテリ13の図示しない電圧センサが充電センサに相当する。
In this process, the
そして、ECUは、バッテリ13の充電許容電力が十分S211Aに制御を進める。バッテリ13の充電許容電力が十分であるとは、バッテリの充電率が所定値(例えば、20%)未満であるような場合である。
Then, the ECU advances the control to S211A where the allowable charging power of the
一方、バッテリ13の充電許容電力が十分でない場合には、まず、モータ回転数、要求トルクから、モータ要求電力WMを算出する(S2113)。さらに、ECU20は、バッテリ許容電力マップを参照し、バッテリ放電要求電力を読み出す(S2114)。図15に、バッテリ許容電力マップ(放電要求マップに相当)を示す。このマップは、SOCと、バッテリ放電要求電力と、充電許容電力との関係を示すマップである。マップは、ECU20内のメモリ(放電要求マップを保持する手段に相当)に格納されている。図15において、SOCは、充電率で示されている。
On the other hand, if the charging allowable power of the
例えば、充電率が80%の場合には、30(図15では、無単位、例えば、KW)の放電要求電力となり、充電率が60%の場合には、25の放電要求電力であり、充電率が2
0%の場合には、放電要求がないことを示す。放電要求電力がある場合が、許容レベルを超えたときに相当する。ただし、図15は、一例であり、許容レベルが20%(あるいは40%)に限定されるわけではない。
For example, when the charging rate is 80%, the required discharge power is 30 (in FIG. 15, no unit, for example, KW), and when the charging rate is 60%, the required discharge power is 25. Rate is 2
In the case of 0%, there is no discharge request. The case where there is a required discharge power corresponds to when the allowable level is exceeded. However, FIG. 15 is an example, and the allowable level is not limited to 20% (or 40%).
また、例えば、充電率が20%の場合には、30(図15では、無単位、例えば、KW)の電力の受け入れが可能であり、充電率が40%の場合には、20の電力の受け入れが可能であり、充電率が80%の場合には、電力を受け入れることができないことを示す。 Also, for example, when the charging rate is 20%, 30 (no unit, for example, KW in FIG. 15) power can be accepted, and when the charging rate is 40%, the power of 20 If it can be accepted and the charging rate is 80%, it indicates that power cannot be accepted.
次に、モータ要求電力から、バッテリ放電要求電力を減算して、FC分担出力電力を算出する(S2115)。この処理を実行するECU20が、放電すべき電力を除外した燃料電池スタック要求電力を算出する手段に相当する。
Next, the battery sharing request power is subtracted from the motor request power to calculate the FC shared output power (S2115). The
さらに、ECU20は、PIマップを参照して、FC分担出力電力を出力するために必要な電流値を決定する(S2116)。PIマップは、FCの出力電力と、出力電流との関係を実験的に求めたテーブルである。
Further, the
さらに、ECU20は、現在のFCのIV特性マップから、上記電流値を出力するために制御すべきFCの目標端子電圧VFCを決定する(S2117)。この処理を実行するECU20が、燃料電池スタックの端子電圧の目標値を設定する手段に相当する。ここで、FCのIV特性マップは、FC端子電圧とFC出力電流との関係を求めたマップである。
Further, the
なお、S2116の処理でPIマップを参照し、S2117の処理でIV特性マップを参照するのは、単に、処理上の都合である。すなわち、FCの出力電力と、出力電流が決定されれば、当然に端子電圧Vは、V=P/Iによって決定できる。しかしながら、本実施形態では、PIマップ、およびそのPIマップの電力の値(P)と電流の値(I)から決定されるVの値について、別途IV特性マップを有している。そして、ECU20は、まず、S2116の処理でPIマップを参照して、電流値(I)を決定する。さらに、ECU20は、S2117の処理でIV特性マップを参照し、FCの端子電圧の値(V)を決定する。
Note that referring to the PI map in the process of S2116 and referring to the IV characteristic map in the process of S2117 is merely a processing convenience. That is, if the FC output power and the output current are determined, the terminal voltage V can naturally be determined by V = P / I. However, in the present embodiment, a separate IV characteristic map is provided for the PI map and the V value determined from the power value (P) and the current value (I) of the PI map. The
また、FCの出力特性(PとIとVとの関係、あるいは、IV特性)は、運転時に、刻々更新されている。例えば、ECU20は、FC端子電圧を検出するセンサとFC出力電流を検出するセンサとを刻々監視し、刻々FCのIV特性を更新している。
Further, the FC output characteristics (relationship between P, I and V, or IV characteristics) are constantly updated during operation. For example, the
そして、ECU20は、FC目標端子電圧VFCが、シンタリング現象回避のための基準値(Vfc_OCV_REF)より小さいか否かを判定する。FC目標端子電圧VFCが、シン
タリング現象回避のための基準値(Vfc_OCV_REF)より小さい場合、ECU20は、制
御をS211Aに進める。
Then, the
一方、FC目標端子電圧VFCが、シンタリング現象回避のための基準値(Vfc_OCV_REF)より小さくない場合、すなわち、FC目標端子電圧VFCが、基準値(Vfc_OCV_REF)に近づいた場合には、ECU20は、FC目標端子電圧VFCを基準値(Vfc_OCV_REF)以下の所定値に設定し、FC昇圧コンバータを制御する(S2119)。この処理
を実行するECU20が、基準電圧未満の値に再設定する手段に相当する。また、この処理を実行するECU20が、第1の電圧変換器を制御する手段に相当する。
On the other hand, when the FC target terminal voltage VFC is not smaller than the reference value (Vfc_OCV_REF) for avoiding the sintering phenomenon, that is, when the FC target terminal voltage VFC approaches the reference value (Vfc_OCV_REF), the
この場合に、FC目標端子電圧VFCを目標値より低く制御するため、究極的には、モータ要求電力から算出されるFC分担電力よりも多くの電力が出力される。しかし、その余剰電力は、バッテリに蓄積できない。S2112の判定で、バッテリ充電許容電力が十
分ではないからである。そこで、余剰電力は、補機で消費されることになる。
In this case, since the FC target terminal voltage VFC is controlled to be lower than the target value, ultimately, more power is output than the FC shared power calculated from the motor required power. However, the surplus power cannot be stored in the battery. This is because the battery charging allowable power is not sufficient in the determination of S2112. Therefore, surplus power is consumed by the auxiliary equipment.
一方、S211Aの処理では、モータ回転数、要求トルクにしたがったバッテリ昇圧コンバータ12の制御が実行される。
以上述べた処理によれば、FC昇圧コンバータ12およびバッテリ昇圧コンバータ14の両方を使用し、燃料電池11とバッテリ13の状態に応じて、モータ16に電力を供給できる。特に、バッテリ13のSOCが高い充電率であり、モータの逆起電力が高く、かつ、モータ要求電力が大きくない場合であっても、本実施形態の電力供給システムによれば、燃料電池11の高電位状態を回避した上、燃料電池11とバッテリ13によるモータ16への電力供給システムを実現できる。
On the other hand, in the process of S211A, control of the
According to the processing described above, both the
<FC昇圧コンバートとバッテリ昇圧コンバータの双方を停止する処理>
モータ逆起電力が低い場合(例えば、停車中)には、FC昇圧コンバータ12およびバッテリ昇圧コンバータ14の双方を停止してもよい。その場合に、燃料電池11の高電位回避制御は、上記2つの昇圧コンバータによる制御によってはなされない。しかし、ECU20は、燃料電池11の端子電圧を監視して、燃料電池11の電力を消費することによって、高電位を回避する。その場合の処理を図16に示す。この処理では、ECU20は、まず、FC昇圧コンバータ12およびバッテリ昇圧コンバータ14の双方を停止する(S2211)。
<Process to stop both FC boost converter and battery boost converter>
When the motor back electromotive force is low (for example, when the vehicle is stopped), both the
次に、ECU20は、FC端子電圧を監視する(S2212)。そして、ECU20は、FC端子電圧が、高電位の基準値(Vfc_OCV_REF)に近づいたか否かを判定する(S
2213)。この判定は、図12のS2083と同様である。
Next, the
2213). This determination is the same as S2083 in FIG.
そして、FC端子電圧が、基準値(Vfc_OCV_REF)に近づいた場合には、ECU20
は、補機によるFC電力の消費を促進する(S2214)。さらに、ECU20は、FC昇圧コンバータ12およびバッテリ昇圧コンバータ14のいずれか、または双方の起動が必要か否かを判定する(S2215)。これらの起動が必要ない場合には、ECU20は、制御をS221に戻す。一方、これらの起動が必要である場合には、ECU20は、リターンする。したがって、FC昇圧コンバータ12およびバッテリ昇圧コンバータ14の双方停止処理が終了する。
When the FC terminal voltage approaches the reference value (Vfc_OCV_REF), the
Promotes the consumption of FC power by the auxiliary machine (S2214). Further, the
以上述べた処理によれば、モータの逆起電力が十分小さい場合には、FC昇圧コンバータ12およびバッテリ昇圧コンバータ14の双方を停止し、電力損失を低減するとともに、補機によるFC電力の消費を促進することで、バッテリの高電位状態を回避できる。
According to the processing described above, when the back electromotive force of the motor is sufficiently small, both the
《第2実施形態》
図17から図20の図面を参照して、本発明の第2実施形態に係る燃料電池システムを説明する。上記第1実施形態では、ソフトスイッチングを行う補助回路を備えた燃料電池システムについて説明した。しかし、本発明の実施は、そのような構成に限定されるわけではない。ここでは、補助回路のない構成にて、電力効率の向上と、高電位回避を実行する燃料電池システムを説明する。他の構成および作用は、第1実施形態と同様である。そこで、第1実施形態と同一の構成要素については、同一の符号を付して、その説明を省略する。
<< Second Embodiment >>
A fuel cell system according to a second embodiment of the present invention will be described with reference to FIGS. In the first embodiment, the fuel cell system including the auxiliary circuit that performs soft switching has been described. However, the implementation of the present invention is not limited to such a configuration. Here, a fuel cell system that performs power efficiency improvement and high potential avoidance with a configuration without an auxiliary circuit will be described. Other configurations and operations are the same as those in the first embodiment. Therefore, the same components as those in the first embodiment are denoted by the same reference numerals, and description thereof is omitted.
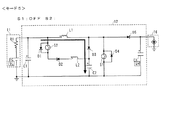
図17は、燃料電池システム10Aの構成図である。ただし、図17では、第2実施形態と直接関係のない構成、例えば、モータ16、水素タンク17、コンプレッサ18等は、図示されていない。また、ECU10も、図示を省略した。
FIG. 17 is a configuration diagram of the
図17のように、燃料電池システム10Aは、燃料電池11(燃料電池スタックに相当
)と、燃料電池11の電圧を変換して、インバータ15に伝達するFC昇圧コンバータ12A(第1の電圧変換器に相当)と、バッテリ13(蓄電装置に相当)と、バッテリ13の電圧を変換して、インバータ15に伝達するバッテリ昇圧コンバータ14A(第2の電圧変換器に相当)と、図示しないモータに電力を供給するインバータ15(負荷回路に相当)とを有している。
As shown in FIG. 17, the
本実施形態では、FC昇圧コンバータ12Aとして、スルーモードつき直流チョッパ回路を使用する。すなわち、スルーモード動作では、燃料電池11の端子電圧は、ダイオード(図17中のDIODE)を通じて、直接インバータ15に伝達される。なお、直流チョッパ回路は、図17のIGBT(Insulated Gate Bipolar Transistor)により直流か
らスイッチング波形を発生させ、さらに、リアクトルの両端に高電圧を発生させ、コンデンサで平滑化して、直流電圧を変換する。そのような動作は周知であるので、ここでは、その説明を省略する。
In this embodiment, a DC chopper circuit with a through mode is used as the
また、本実施形態では、バッテリ昇圧コンバータ14AとしてハーフブリッジタイプのDCDCコンバータを使用する。ハーフブリッジタイプのDCDCコンバータの動作も、同様であるので、ここでは、その説明を省略する。
In the present embodiment, a half-bridge type DCDC converter is used as the
さらに、図17では、各端子の電圧を測定する電圧センサおよび電流を測定する電流センサを明示した。本実施形態では、燃料電池11の端子電圧を電圧センサ61で測定する。また、燃料電池11から出力される電流を電流センサ62で測定する。また、バッテリ13の端子電圧を電圧センサ63で測定する。また、バッテリ13から出力される電流を電流センサ64で測定する。さらにまた、インバータ15に入力される入力電圧を電圧センサ65で測定する。また、インバータ15に入力される電流を電流センサ66で測定する。図示しないECU(図1のECU20)は、これら電圧センサおよび電流センサの検出値を制御プロセスと並行して監視している。
Further, FIG. 17 clearly shows a voltage sensor that measures the voltage of each terminal and a current sensor that measures current. In the present embodiment, the terminal voltage of the
図18に、燃料電池11のIV特性によって、燃料電池システム10Aの制御ロジックの概要を示す。図18において、出力制御域(1)で示されるのは、出力電力の小さい低負荷領域である。また、出力制御域(2)で示されるのは、出力電力の大きい高負荷領域である。
FIG. 18 shows an outline of the control logic of the
低負荷か、高負荷かは、モータ要求電圧によって決定されるシステム電圧+所定の許容値αが、燃料電池11の端子電圧を越えるか否かで決定される。すなわち、モータの回転数が小さく、かつ、ユーザの要求トルクが小さい間は、モータ逆起電力が小さく、燃料電池11に要求される要求出力も小さい。その結果、燃料電池11の端子電圧は、モータ要求電圧を上回る。これが、出力制御域(1)の領域である。
Whether the load is low or high is determined by whether the system voltage determined by the motor required voltage + the predetermined allowable value α exceeds the terminal voltage of the
そして、モータの回転数が上昇し、モータ逆起電力が大きくなり、かつ、燃料電池11の出力電流の増加に伴って燃料電池11の端子電圧が低下すると、出力制御域(2)となる。
When the motor speed increases, the motor back electromotive force increases, and the terminal voltage of the
燃料電池システム10Aは、出力制御域(1)では、基本的には、バッテリ昇圧コンバータ14Aを用いて、燃料電池11の端子電圧およびインバータ15の入力電圧(これをシステム電圧ともいう)を制御する。このとき、FC昇圧コンバータ12Aは、停止する。そして、燃料電池11の出力電力は、ダイオード(DIODE)を通じて、インバータ15に供給する。ただし、図18では、省略しているが、図7Aに示したように、バッテリ13のIV特性との関係で、バッテリ13のIV特性LBTが、燃料電池11のIV特性LFCより高い領域においてはFC昇圧コンバータ12の動作停止が許容されない。
In the output control region (1), the
一方、出力制御域(2)では、バッテリ昇圧コンバータ14Aによって、インバータ15の入力電圧(システム電圧)を制御する一方、FC昇圧コンバータ12Aによって、FC13の端子電圧を制御する。これによって、バッテリ13と燃料電池11とのインバータ15への供給電力の配分を制御する。
On the other hand, in the output control region (2), the input voltage (system voltage) of the
なお、図18には、明示していないが、車両1のシフトレバーがP(駐車)レンジに入っている等、停車中は、基本的には、FC昇圧コンバータ12Aと、バッテリ昇圧コンバータ14Aとは、ともに、停止する。しかし、いずれの制御状態であっても、ECU20は、FC10の端子電圧を監視し、あるいは、端子電圧の制御の目標値を監視し、高電位状態を回避する処理を実行する。
Although not explicitly shown in FIG. 18, the
図19は、燃料電池システム10Aにおける制御手順を例示するフローチャートである。本実施形態では、図1に示したECU20にて制御プログラムを実行することによって、図19の制御が実現される。この制御は、ECU20での、無限に繰り返されるループとして実現される。
FIG. 19 is a flowchart illustrating a control procedure in the
ここでは、図19のS101の処理から説明を開始する。すなわち、ECU20は、車両1が停車中か否かを判定する(S400)。停車中か否かは、車両1の操作レバーが、Pレンジにあるか否かで判定される。なお、図示しないが、操作レバーの状態は、センサを通じてECU20に通知されている。この処理を実行するECU20が、検知する手段に相当する。
Here, the description starts from the processing of S101 in FIG. That is, the
車両1が停車中の場合、ECU20は、FC昇圧コンバータ12Aと、バッテリ昇圧コンバータ14Aをともに停止する(S401)。モータ16(図1参照)に電力を供給する必要がないからである。この処理を実行するECU20が、第1の電圧変換器および第2の電圧変換器を停止する手段に相当する。
When the
ただし、FC昇圧コンバータ12Aと、バッテリ昇圧コンバータ14Aをともに停止しても、ECU20は、電圧センサ61をによって、燃料電池11の端子電圧を監視している。そして、ECU20は、高電位回避が必要か否かを判定する(S402)。この判定は、第1実施形態と同様、FC端子電圧と基準値(Vfc_OCV_REF)との差異が、許容値
未満になったか否かで判定すればよい。
However, even if both the
そして、高電位回避が必要でない場合、ECU20は、制御をS101に戻す。一方、S102の判定で、高電位回避が必要な場合、ECU20は、補機に燃料電池11の電力を供給し、電力を消費する(S403)。例えば、コンプレッサ18を起動する、車両1の図示しないエアコンを起動する、照明を点灯する等である。この処理を実行するECU20が、燃料電池スタックの電力を消費する手段に相当する。
And when high potential avoidance is not required, ECU20 returns control to S101. On the other hand, when it is determined in S102 that high potential avoidance is necessary, the
さらに、ECU20は、補機の電力消費によって高電位回避が可能か否かを判定する(S404)。この判定は、補機の電力消費によって、FC端子電圧と基準値(Vfc_OCV_REF)との差異が、許容値より大きくなったか否かで判定すればよい。補機の電力消費に
よって高電位回避が可能な場合には、ECU20は、制御をS102に戻す。一方、補機の電力消費によって高電位回避が可能でない場合、ECU20は、バッテリ昇圧コンバータ14Aを起動する。そして、ECU20は、バッテリ昇圧コンバータ14Aによって、燃料電池11の端子電圧を低下させる(S405)。この場合には、燃料電池11で発電された電力は、例えば、補機の他、停車中の車両1のモータ16で消費され、あるいは、バッテリ13を充電するのに使用される。その後、ECU20は、制御をS100に戻す。
Further, the
次に、例えば、操作レバーがPレンジからD(駆動)レンジ、R(バック)レンジ等の駆動を指示するレンジになると、ECU20は、燃料電池11の端子電圧から、モータ16の負荷が図18の出力制御域(1)にあるか否かを判定する(S406)。上述のように、制御が図18の出力制御域(1)にある場合は、低負荷の状態である。
Next, for example, when the operation lever changes from the P range to the D (drive) range, R (back) range, or the like instructing driving, the
出力制御域(1)にある場合、ECU20は、FC昇圧コンバータ12Aを停止し、バッテリ昇圧コンバータ14Aで出力制御を行う(S407)。低負荷でのFC昇圧コンバータ12Aの効率が低いためである。この処理を実行するECU20が、第1の電圧変換器を停止させて燃料電池スタックの出力電力を負荷回路に伝達する手段に相当する。
When in the output control range (1), the
ただし、この場合も、ECU20は、燃料電池11の端子電圧を監視し、高電位回避が必要か否かを判定する(S408)。そして、高電位回避が必要な場合、ECU20は、バッテリ昇圧コンバータ14Aおよび停止中のFC昇圧コンバータ12Aを通じて、燃料電池11の端子電圧を低下させる(S409)。この処理を実行するECU20が、第1の電圧制限手段に相当する。
However, also in this case, the
具体的には、システム電圧、すなわち、インバータ15の入力電圧を低下させる。その結果、燃料電池11のIV特性にしたがい、出力電流が増加し、発電される電力が増加する。燃料電池11の端子電圧がモータ要求電力より高いので、増加した電力は、モータ16で消費される。また、余剰電力は、バッテリ13に蓄積されることになる。その後、ECU20は、制御をS106に戻す。
Specifically, the system voltage, that is, the input voltage of the
また、S106の判定で、高負荷、すなわち、図18の出力制御域(2)になったと判定されると、ECU20は、FC昇圧コンバータ12Aと、バッテリ昇圧コンバータ14Aの協調制御を実行する(S410)。この処理は、図14の場合と同様である。
If it is determined in S106 that the load is high, that is, the output control range (2) in FIG. 18 is reached, the
ただし、バッテリ昇圧コンバータ14Aの協調制御とともに、ECU20は、バッテリ昇圧コンバータ14Aの昇圧比を監視している。昇圧比は、バッテリの端子を測定する電圧センサ64と、インバータ15の入力電圧を監視する電圧センサ66の測定値の比によって検知できる。ただし、インバータ15の入力電圧は、測定値に代えて、インバータ要求電圧を用いてもよい。そして、ECU20は、バッテリ昇圧コンバータ14Aの昇圧比が1以下か否かを判定する(S411)。
However, along with the cooperative control of the
昇圧比が1以下の場合に、ECU20は、バッテリ昇圧コンバータ14Aを停止する(S412)。バッテリ昇圧コンバータ14Aによる昇圧ができないからである。この処理を実行するECU20が、第2の電圧変換器を停止する手段に相当する。そして、ECU20は、FC昇圧コンバータ12Aによって、燃料電池11の出力を制御する(S413)。また、このとき、ECU20は、燃料電池11の端子電圧が、基準値(Vfc_OCV_REF)に近づいたか否かを判定する。そして、燃料電池11の端子電圧が、基準値(Vfc_OCV_REF)に近づいた場合に、ECU20は、FC昇圧コンバータ12Aにより、燃料電池11の端子電圧を基準値(Vfc_OCV_REF)より小さくなるように維持する。この処理を
実行するECU20が、第2の電圧制限手段に相当する。
When the boost ratio is 1 or less, the
そして、ECU20は、さらに、モータ16の負荷が出力制御域(2)にあるか否かを判定する(S414)。この判定は、燃料電池11の端子電圧が、インバータ要求電圧より高いか、否かにより判定できる。負荷が出力制御域(2)にある場合、ECU20は、制御をS110に戻し、協調制御を継続する。この場合には、低負荷ではないと判定されたからである。一方、低負荷となり、図18の出力制御域(1)に戻った場合には、ECU20は、制御をS100に戻す。
The
以上述べたように、本実施形態の燃料電池システム10Aによれば、停車中は、FC昇圧コンバータ12Aと、バッテリ昇圧コンバータ14Aを停止するとともに、燃料電池11の端子電圧が高電位になるのを回避する。さらに、ECU20は、FC昇圧コンバータ12Aの効率が悪い低負荷の領域では、極力FC昇圧コンバータ12Aを停止するとともに、燃料電池11の端子電圧が高電位になるのを回避する。そして、高負荷の領域では、FC昇圧コンバータ12Aと、バッテリ昇圧コンバータ14Aとの協調制御によって、燃料電池11の端子電圧が高電位になるのを回避しつつ、燃料電池11およびバッテリ13からインバータ15およびモータ16への供給電力の分担を制御する。
As described above, according to the
以上のように、燃料電池システム10Aは、停車中、低負荷、および高負荷に渡るそれぞれの領域で、電圧変換効率の向上と、燃料電池11の高電位状態の回避とが両立する方向に制御することができる。
As described above, the
《第3実施形態》
本発明に係る燃料電池システムの第3実施形態について、図21〜23に基づいて説明する。本実施形態に係る燃料電池システムと上述の第1実施形態に係る燃料電池システムとの相違点は、FC昇圧コンバータ12内の補助回路12bおよびそれに関連する技術である。そこで、本実施形態では、当該相違点に着目して説明を行う。
<< Third Embodiment >>
A third embodiment of the fuel cell system according to the present invention will be described with reference to FIGS. The difference between the fuel cell system according to the present embodiment and the fuel cell system according to the first embodiment described above is the
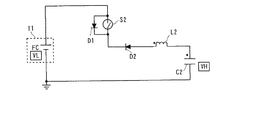
図21は、図2と同様に、FC昇圧コンバータ12を中心として、燃料電池システム10の電気的構成を示す図である。ここで、図21に示すFC昇圧コンバータ12の補助回路12bには、スイッチ素子S3とダイオードD6とで構成されるスイッチング回路が更に設けられている。具体的には、スイッチ素子S3の一端がダイオードD2のアノード端子側に接続され、該スイッチ素子S3の他端が燃料電池11の低電位側の端子に接続されている。このスイッチ素子S3は、先のソフトスイッチング処理におけるモード2の動作での、スナバコンデンサC2に蓄えられた電荷の放電をサポートするものである。そこで、本実施形態においては、スイッチ素子S3のスイッチング動作を含めた、新たなソフトスイッチング処理を図22及び図23に基づいて説明する。
FIG. 21 is a diagram showing an electrical configuration of the
図22は、図3と同様にFC昇圧コンバータ12におけるソフトスイッチング処理の流れを示すフローチャートである。図3に示すソフトスイッチング処理との違いは、図22に示す処理では、S102とS103の処理の間、即ちモード2とモード3の各動作の間に、スイッチ素子S3のスイッチング動作による新たな処理S301が設定されている点である。そこで、この相違点を重点的に説明し、他の処理については、図3と同一の参照番号を付すことでその詳細な説明は省略する。
FIG. 22 is a flowchart showing the flow of the soft switching process in the
ここで、S102の処理によりモード2の動作が行われているとき、FC昇圧コンバータ12では、スイッチ素子S3はターンオフ状態となっている。また、スイッチ素子S3のスイッチング動作の効果を明確に示すために、FC昇圧コンバータ12の出口電圧VHとその入口電圧VLの関係を、FC昇圧コンバータ12の電気的状態を表すパラメータである比VH/VLについて、該比が2未満であると設定する。この場合、コイルL2とスナバコンデンサC2の半波共振によって、該スナバコンデンサC2の電荷は抜けていくが、図10Bに示すようにスナバコンデンサC2の電圧はゼロとはならないことになる。
Here, when the
ここで、本実施形態では、上記半波共振によるスナバコンデンサC2の電圧変動が底値となるタイミングで、S301の処理によりスイッチ素子S3をターンオンする。すると、図23に示すように、スナバコンデンサC2において半波共振によっても抜けきらなかった電荷が、スイッチ素子S3を介して補助回路12b内に分散されていくため、スナバコンデンサC2の電圧を更に低下させることができる。その結果、S301後のS103の処理において、スイッチ素子S1をターンオンするとき、該スイッチ素子S1にかかっ
ている電圧を可及的に下げることができ、以てスイッチング損失をより確かに抑制することができる。尚、FC昇圧コンバータ12の出口電圧VHとその入口電圧VLの関係において、比VH/VLが所定値を超える場合(本実施形態では2を超える場合)は、スナバコンデンサC2の電荷はモード2の動作により抜けきっているため、S301の処理を必ずしも行う必要はない。
Here, in the present embodiment, the switch element S3 is turned on by the process of S301 at the timing when the voltage fluctuation of the snubber capacitor C2 due to the half-wave resonance reaches the bottom. Then, as shown in FIG. 23, the electric charge that could not be removed due to the half-wave resonance in the snubber capacitor C2 is dispersed in the
《その他の変形例》
<回生電力の燃料電池側への逆流の防止>
本燃料電池システム10には、回生電力を発生させる回生ブレーキを採用してもよい。その場合に、回生電力は、スナバコンデンサC2(図2参照)に蓄積されることになる。そして、ソフトスイッチング時、スナバコンデンサC2に蓄えられた回生電力がFCへ入力されないようにするため、スナバコンデンサC2からFCへ流れる電気回路上に回生電力を抑える素子を設け、あるいは、スナバコンデンサC2に蓄えられた回生電力が二次バッテリへ流れるようにしてもよい。FCへ流れる回生電力を抑える方法としては、例えば、スナバコンデンサC2からFCへ流れる電路上に、一端が接地された平滑コンデンサ、ツェナダイオード、又はバリスタを設けることで係る電路の電圧が規定以上になるのを抑制し、あるいは、スナバコンデンサC2からFCへ回生電力が逆流するのを防止するダイオードを設ける方法が挙げられる。また、回生電力を二次バッテリへ流れるようにする方法としては、例えば、S2の下流側をFCではなく二次バッテリへ繋ぐ回路構成にする方法が挙げられる。
<< Other modifications >>
<Preventing backflow of regenerative power to the fuel cell>
The
<衝突時の燃料電池出力遮断>
また、本燃料電池システム10は、車両1の衝突時に,燃料電池11の出力を遮断するシステムとしてもよい。具体的には、燃料電池システム10のFC昇圧コンバータ12の下流側には,インバータ15及びバッテリ昇圧コンバータ14との電気的な接続をON/OFFするためのリレー回路が設けてもよい。なお、既に説明した構成から明らかなように,燃料電池システム10は、FC昇圧コンバータ12の下流側に流れる電流量が比較的に少ないものとなっている。このため、燃料電池システム10は、上記リレー回路として、既存の同種のシステムでは燃料電池の直後に設けられているリレー回路よりも,小型のもの(低電流用のもの)を採用したシステムとなっている。
<Fuel cell output shut off at the time of collision>
The
そして、燃料電池システム10のECU20は、車両1に設けられている衝突検出センサの出力に基づき,衝突の有無を常時監視し、衝突したことを検出した場合には、リレー回路を制御することにより,FC昇圧コンバータ12とインバータ15及びバッテリ昇圧コンバータ14との間の電気的な接続を切断するユニットとすればよい。
The
<要求出力算出手順の変形>
さらに、上記実施形態で説明したように、図11に示すFC昇圧コンバータ制御における処理S205では、アクセルペダルセンサ21によって検出されたアクセルペダルの開度に従って発電が行われている燃料電池11の出力電圧が検出される。本変形例では、燃料電池11の出力電圧の検出について、該燃料電池11の出力(以下、FC出力という)に基づいて、燃料電池11の出力電圧を算出することとする。ここで、FC出力は、以下の式(1)に従って算出される。
(FC出力)=(要求出力)+(補機要求出力)+(バッテリ充電(放電)出力)・・・(1)
<Modification of required output calculation procedure>
Further, as described in the above embodiment, in the process S205 in the FC boost converter control shown in FIG. 11, the output voltage of the
(FC output) = (Request output) + (Auxiliary machine request output) + (Battery charge (discharge) output) (1)
補機要求出力は、水素タンク17やコンプレッサ18等の補機に要求されている出力であり、バッテリ充電出力は、充電時におけるバッテリ13に要求されている出力であり、バッテリ放電出力は放電時におけるバッテリ13の出力である。バッテリ13の残蓄電量がSOC閾値未満であれば、バッテリ充電出力を上記式(1)に算入し、FC出力を算出
する。バッテリ13の残蓄電量がSOC閾値以上であれば、バッテリ放電出力を上記(1)にマイナス分として算入し、FC出力を算出する。そして、上記式(1)で算出したFC出力に基づいて、燃料電池11の出力電圧が算出される。具体的には、FC出力と燃料電池11の出力電流とが関連付けられているIP特性MAP及び燃料電池11の出力電流と燃料電池11の出力電圧とが関連付けられているIV特性マップをECU20が有しており、FC出力に従ってこれらのマップにアクセスし、燃料電池11の出力電圧が算出される。本変形例によれば、補機に要求されている出力やバッテリ13の残蓄電量を加味して、FC出力を算出することにより、補機に要求されている出力やバッテリ13の残蓄電量を考慮して、燃料電池11の出力電圧を算出することができる。
The auxiliary machine required output is an output required for auxiliary machines such as the hydrogen tank 17 and the
また、上記式(1)を以下に示す式(2)のように変形してもよい。
(FC出力)=(要求出力)+(補機要求出力)+(バッテリ充電(放電)出力)+(F
C昇圧コンバータ12のスイッチング損失)+(バッテリ昇圧コンバータ14のスイッチ
ング損失)・・・(2)
このように変形することにより、FC昇圧コンバータ12のスイッチング損失やバッテリ昇圧コンバータ14のスイッチング損失を更に加味して、FC出力を算出することにより、FC昇圧コンバータ12のスイッチングの損失分やバッテリ昇圧コンバータ14のスイッチングの損失分を考慮して、燃料電池11の出力電圧を算出することができる。
Moreover, you may deform | transform said Formula (1) like Formula (2) shown below.
(FC output) = (Request output) + (Auxiliary machine request output) + (Battery charge (discharge) output) + (F
Switching loss of C boost converter 12) + (switching loss of battery boost converter 14) (2)
By modifying in this way, the switching loss of the
FC昇圧コンバータ12のスイッチング損失は、FC昇圧コンバータ12の出入口に、電流センサ及び電圧センサを設け、FC昇圧コンバータ12の出入口側の電流及び電圧を測定することにより算出する。また、バッテリ昇圧コンバータ14のスイッチング損失は、バッテリ昇圧コンバータ14の出入口に、電流センサ及び電圧センサを設け、バッテリ昇圧コンバータ14の出入口側の電流及び電圧を測定することにより算出する。ここで、FC昇圧コンバータ12及びバッテリ昇圧コンバータ14がともに昇圧動作を行っている場合には、FC昇圧コンバータ12のスイッチング損失及びバッテリ昇圧コンバータ14のスイッチング損失を加味してFC出力を算出する。一方、バッテリ昇圧コンバータ14のみが昇圧動作を行っている場合には、バッテリ昇圧コンバータ14のスイッチング損失のみを加味してFC出力を算出する。
The switching loss of the
また、モータ16を駆動するためのインバータ15への電圧印加について、該モータ16の駆動効率を考慮するのが好ましい。例えば、上記実施例で説明したように、燃料電池11からモータ16への電力供給時に、FC昇圧コンバータ12を停止させない場合、インバータ15に印加される電圧をFC昇圧コンバータ12によって昇圧させる。本変形例では、インバータ15に印加される電圧を、要求トルクとモータ16の回転数とに基づいて、インバータ15、モータ16を含む負荷の効率特性とインバータ15に印加される電圧とを関連付けたマップから決定する。そして、FC昇圧コンバータ12の昇圧動作により、燃料電池11の出力電圧を上記決定した電圧に昇圧させ、インバータ15に印加する。例えば、インバータ15の効率特性はインバータ15に印加される電圧に対するインバータ15の変換効率であり、モータ16の効率特性はモータ16に印加される電圧に対するモータ16の駆動効率である。
In addition, it is preferable to consider the driving efficiency of the
本変形例では、負荷の効率特性を決定し、要求トルクとモータ16の回転数との関係から、図24A、図24B及び図24Cに示すような負荷の効率特性の領域を画定する。図24A、図24B及び図24Cは、要求トルクを縦軸とし、モータ16の回転数を横軸として、負荷の効率特性の領域を効率の高低により段階的に区分して表示したマップである。図24Aは、インバータ15に印加する電圧が高である場合における負荷の効率特性の領域を表示したマップである。図24Bは、インバータ15に印加する電圧が中である場合における負荷の効率特性の領域を表示したマップである。図24Cは、インバータ15に印加する電圧が低である場合における負荷の効率特性の領域を表示したマップである。
図24A、図24B及び図24Cにおける点Aは、要求トルクT1とモータ16の回転数R1とに基づいて決定されたものであり、点Bは、要求トルクT2とモータ16の回転数R2とに基づいて決定されたものである。
In this modification, the load efficiency characteristics are determined, and regions of the load efficiency characteristics as shown in FIGS. 24A, 24B, and 24C are defined from the relationship between the required torque and the rotation speed of the
In FIG. 24A, FIG. 24B and FIG. 24C, point A is determined based on the required torque T1 and the rotational speed R1 of the
図24Cにおける点Aは、負荷の効率特性が高効率である領域に含まれているが、図24A及び図24Bにおける点Aは、負荷の効率特性が高効率である領域に含まれていない。したがって、要求トルクT1及びモータ16の回転数R1では、インバータ15に印加する電圧が低である場合、負荷の効率特性が高いことがわかる。図24Bにおける点Bは、負荷の効率特性が高効率である領域に含まれているが、図24A及び図24Cにおける点Bは、負荷の効率特性が高効率である領域に含まれていない。したがって、要求トルクT2及びモータ16の回転数R2では、インバータ15に印加する電圧が中である場合、負荷の効率特性が高いことがわかる。本変形例では、以上のようなマップをECU20が有しており、インバータ15に印加する電圧を負荷の効率特性の観点から決定することによって、最適電圧をインバータ15に印加することができる。
The point A in FIG. 24C is included in the region where the load efficiency characteristic is high efficiency, but the point A in FIGS. 24A and 24B is not included in the region where the load efficiency characteristic is high efficiency. Therefore, it can be understood that the load efficiency characteristic is high when the voltage applied to the
1・・・・車両
10・・・・燃料電池システム
11・・・・燃料電池(FC)
12・・・・FC昇圧コンバータ
12a・・・・メイン昇圧回路
12b・・・・補助回路
13・・・・バッテリ
14・・・・バッテリ昇圧コンバータ
15・・・・インバータ
16・・・・モータ
20・・・・ECU
21・・・・アクセルペダルセンサ
S1、S2、S3・・・・スイッチ素子
C1、C3・・・・平滑コンデンサ
C2・・・・スナバコンデンサ
L1、L2、L3・・・・コイル
D1、D2、D3、D4、D5・・・・ダイオード
1 ....
12 ....
21 ... Accelerator pedal sensor S1, S2, S3 ... Switch elements C1, C3 ... Smoothing capacitor C2 ... Snubber capacitors L1, L2, L3 ... Coils D1, D2, D3 , D4, D5... Diode
Claims (4)
前記負荷回路に電力を供給する燃料電池スタックと、
電力を蓄積するとともに、前記負荷回路に電力を供給可能な蓄電装置と、
前記燃料電池スタックと前記負荷回路との間に設けられ前記燃料電池スタックの端子電圧を前記負荷回路の入力電圧に変換する第1の電圧変換器と、
前記蓄電装置の端子電圧を前記負荷回路の入力電圧に変換する第2の電圧変換器と、
制御部と、を備え、
前記制御部は、前記駆動装置の駆動に伴う前記負荷回路の要求電圧を算出する手段と、
前記燃料電池スタックの端子電圧が前記負荷回路の要求電圧を超える場合に、前記第1の電圧変換器を停止させて前記燃料電池スタックの出力電力を前記負荷回路に伝達する手段と、
前記第2の電圧変換器を通じて前記負荷回路の入力電圧を制御することによって前記燃料電池スタックの端子電圧を所定の基準電圧以下に制限する第1の電圧制限手段と、を有する電力供給システム。 A power supply system that is mounted on a mobile body and supplies power to a drive device of the mobile body through a load circuit,
A fuel cell stack for supplying power to the load circuit;
A power storage device capable of storing power and supplying power to the load circuit;
A first voltage converter provided between the fuel cell stack and the load circuit and converting a terminal voltage of the fuel cell stack into an input voltage of the load circuit;
A second voltage converter that converts a terminal voltage of the power storage device into an input voltage of the load circuit;
A control unit,
The control unit calculates a required voltage of the load circuit accompanying driving of the driving device;
Means for stopping the first voltage converter and transmitting the output power of the fuel cell stack to the load circuit when the terminal voltage of the fuel cell stack exceeds the required voltage of the load circuit;
A power supply system comprising: a first voltage limiting unit configured to limit a terminal voltage of the fuel cell stack to a predetermined reference voltage or less by controlling an input voltage of the load circuit through the second voltage converter;
前記制御部は、
前記第2の電圧変換器の蓄電装置側の電圧に対して前記負荷回路側の電圧が昇圧された関係にないときに前記第2の電圧変換器を停止する手段と、
前記第2の電圧変換器が停止したときに第1の電圧変換器を動作させて、前記燃料電池スタックの端子電圧を前記基準電圧以下に制限する第2の電圧制限手段と、を有する請求項1に記載の電力供給システム。 The second voltage converter is a booster circuit;
The controller is
Means for stopping the second voltage converter when the voltage on the load circuit side is not boosted with respect to the voltage on the power storage device side of the second voltage converter;
2. A second voltage limiting unit configured to operate the first voltage converter when the second voltage converter stops and limit a terminal voltage of the fuel cell stack to the reference voltage or less. The power supply system according to 1.
前記制御部は、
蓄電装置の充電状態とその充電状態で蓄電装置において放電すべき電力との関係を記録した放電要求マップを保持する手段と、
前記負荷に供給すべき要求電力を算出する手段と、
前記充電状態が許容レベルを超えたときに、前記要求電力から前記蓄電装置において放電すべき電力を除外した燃料電池スタック要求電力を算出する手段と、
前記燃料電池スタック要求電力を前記燃料電池スタックから出力させるために前記燃料電池スタックの端子電圧の目標値を設定する手段と、
前記端子電圧の目標値が前記基準電圧を越える場合に、前記目標値を前記基準電圧以下の値に再設定する手段と、
前記燃料電池スタックの端子電圧が前記目標値となるにように前記第1の電圧変換器を制御する手段とをさらに備える請求項1または2に記載の電力供給システム。 A charge sensor for detecting a charge state of the power storage device;
The controller is
Means for holding a discharge request map that records a relationship between a charged state of the power storage device and power to be discharged in the power storage device in the charged state;
Means for calculating required power to be supplied to the load;
Means for calculating fuel cell stack required power excluding power to be discharged in the power storage device from the required power when the state of charge exceeds an allowable level;
Means for setting a target value of a terminal voltage of the fuel cell stack in order to output the fuel cell stack required power from the fuel cell stack;
Means for resetting the target value to a value below the reference voltage when the target value of the terminal voltage exceeds the reference voltage;
The power supply system according to claim 1, further comprising means for controlling the first voltage converter so that a terminal voltage of the fuel cell stack becomes the target value.
前記移動体の移動を指令する操作レバーの位置を検知する手段と、
前記操作レバーの位置が停止を指令している場合に、第1の電圧変換器および第2の電圧変換器を停止する手段と、
第1の電圧変換器および第2の電圧変換器が停止し、かつ、前記燃料電池スタックの端子電圧が前記基準電圧から所定の範囲に近づいたときに、補機を通じて前記燃料電池スタックの電力を消費する手段と、をさらに備える請求項1から3のいずれか一項に記載の電力供給システム。 The controller is
Means for detecting a position of an operation lever that commands movement of the moving body;
Means for stopping the first voltage converter and the second voltage converter when the position of the operation lever is commanding to stop;
When the first voltage converter and the second voltage converter are stopped, and the terminal voltage of the fuel cell stack approaches a predetermined range from the reference voltage, the power of the fuel cell stack is supplied through an auxiliary device. The power supply system according to any one of claims 1 to 3, further comprising: means for consuming.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007341286A JP4844556B2 (en) | 2007-12-28 | 2007-12-28 | Power supply system |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007341286A JP4844556B2 (en) | 2007-12-28 | 2007-12-28 | Power supply system |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2009165244A true JP2009165244A (en) | 2009-07-23 |
| JP4844556B2 JP4844556B2 (en) | 2011-12-28 |
Family
ID=40967204
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007341286A Expired - Fee Related JP4844556B2 (en) | 2007-12-28 | 2007-12-28 | Power supply system |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP4844556B2 (en) |
Cited By (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2010143247A1 (en) * | 2009-06-08 | 2010-12-16 | トヨタ自動車株式会社 | Fuel cell system and power control method thereof |
| JP2011097669A (en) * | 2009-10-27 | 2011-05-12 | Ricoh Co Ltd | Charging circuit and charging method |
| JP2011205735A (en) * | 2010-03-24 | 2011-10-13 | Toyota Motor Corp | Fuel cell vehicle |
| WO2013001343A2 (en) | 2011-06-28 | 2013-01-03 | Toyota Jidosha Kabushiki Kaisha | Fuel cell system and control method therefor |
| JP2013062153A (en) * | 2011-09-14 | 2013-04-04 | Honda Motor Co Ltd | Fuel battery vehicle |
| JP2013169076A (en) * | 2012-02-15 | 2013-08-29 | Toyota Motor Corp | Operation method of moving body and moving body |
| JP2013180645A (en) * | 2012-03-01 | 2013-09-12 | Toyota Motor Corp | Notification device, vehicle and method for controlling notification device |
| JP2014166103A (en) * | 2013-02-27 | 2014-09-08 | Honda Motor Co Ltd | Electric power system and fuel cell vehicle |
| JP2014166104A (en) * | 2013-02-27 | 2014-09-08 | Honda Motor Co Ltd | Electric power system and fuel cell vehicle |
| JP2015035840A (en) * | 2013-08-07 | 2015-02-19 | スズキ株式会社 | Fuel cell vehicle |
| JP2015038882A (en) * | 2014-10-20 | 2015-02-26 | トヨタ自動車株式会社 | Fuel battery system |
| JP2016010268A (en) * | 2014-06-25 | 2016-01-18 | 本田技研工業株式会社 | Two-power source load drive fuel cell system and fuel cell vehicle |
| JP2016091648A (en) * | 2014-10-30 | 2016-05-23 | 本田技研工業株式会社 | Control method for fuel cell system and fuel cell automobile |
| JP2016091647A (en) * | 2014-10-30 | 2016-05-23 | 本田技研工業株式会社 | Control method for fuel cell system and fuel cell automobile |
| JP2016092893A (en) * | 2014-10-30 | 2016-05-23 | 本田技研工業株式会社 | Fuel cell system control method and fuel cell vehicle |
| JP2016207435A (en) * | 2015-04-22 | 2016-12-08 | 株式会社デンソー | Fuel cell vehicle |
| JP2017139150A (en) * | 2016-02-04 | 2017-08-10 | トヨタ自動車株式会社 | Fuel cell system |
| JP2018121393A (en) * | 2017-01-23 | 2018-08-02 | 株式会社Subaru | Control device of electric vehicle and electric vehicle |
| JP2018198213A (en) * | 2018-07-26 | 2018-12-13 | 株式会社デンソー | Fuel cell vehicle |
| JP2021118064A (en) * | 2020-01-23 | 2021-08-10 | 株式会社豊田自動織機 | Fuel cell system |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| EP3338102A4 (en) * | 2015-08-19 | 2019-09-11 | FCA Fiat Chrysler Automóveis Brasil Ltda. | System and method of battery monitoring |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000036308A (en) * | 1998-07-16 | 2000-02-02 | Toyota Motor Corp | Fuel cell system |
| JP2003229138A (en) * | 2002-02-05 | 2003-08-15 | Equos Research Co Ltd | Fuel cell system |
| JP2004187332A (en) * | 2002-11-29 | 2004-07-02 | Honda Motor Co Ltd | Controller for fuel cell vehicle |
| JP2006340419A (en) * | 2005-05-31 | 2006-12-14 | Toshiba Corp | Hybrid vehicle |
| JP2007318938A (en) * | 2006-05-26 | 2007-12-06 | Honda Motor Co Ltd | Power system for fuel-cell vehicle |
-
2007
- 2007-12-28 JP JP2007341286A patent/JP4844556B2/en not_active Expired - Fee Related
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2000036308A (en) * | 1998-07-16 | 2000-02-02 | Toyota Motor Corp | Fuel cell system |
| JP2003229138A (en) * | 2002-02-05 | 2003-08-15 | Equos Research Co Ltd | Fuel cell system |
| JP2004187332A (en) * | 2002-11-29 | 2004-07-02 | Honda Motor Co Ltd | Controller for fuel cell vehicle |
| JP2006340419A (en) * | 2005-05-31 | 2006-12-14 | Toshiba Corp | Hybrid vehicle |
| JP2007318938A (en) * | 2006-05-26 | 2007-12-06 | Honda Motor Co Ltd | Power system for fuel-cell vehicle |
Cited By (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8996182B2 (en) | 2009-06-08 | 2015-03-31 | Toyota Jidosha Kabushiki Kaisha | Fuel cell system and power control method therefor |
| WO2010143247A1 (en) * | 2009-06-08 | 2010-12-16 | トヨタ自動車株式会社 | Fuel cell system and power control method thereof |
| JP2011097669A (en) * | 2009-10-27 | 2011-05-12 | Ricoh Co Ltd | Charging circuit and charging method |
| JP2011205735A (en) * | 2010-03-24 | 2011-10-13 | Toyota Motor Corp | Fuel cell vehicle |
| WO2013001343A2 (en) | 2011-06-28 | 2013-01-03 | Toyota Jidosha Kabushiki Kaisha | Fuel cell system and control method therefor |
| US9083266B2 (en) | 2011-06-28 | 2015-07-14 | Toyota Jidosha Kabushiki Kaisha | Fuel cell system and control method therefor |
| JP2013062153A (en) * | 2011-09-14 | 2013-04-04 | Honda Motor Co Ltd | Fuel battery vehicle |
| US8557461B2 (en) | 2011-09-14 | 2013-10-15 | Honda Motor Co., Ltd | Fuel cell vehicle |
| JP2013169076A (en) * | 2012-02-15 | 2013-08-29 | Toyota Motor Corp | Operation method of moving body and moving body |
| JP2013180645A (en) * | 2012-03-01 | 2013-09-12 | Toyota Motor Corp | Notification device, vehicle and method for controlling notification device |
| JP2014166104A (en) * | 2013-02-27 | 2014-09-08 | Honda Motor Co Ltd | Electric power system and fuel cell vehicle |
| JP2014166103A (en) * | 2013-02-27 | 2014-09-08 | Honda Motor Co Ltd | Electric power system and fuel cell vehicle |
| JP2015035840A (en) * | 2013-08-07 | 2015-02-19 | スズキ株式会社 | Fuel cell vehicle |
| JP2016010268A (en) * | 2014-06-25 | 2016-01-18 | 本田技研工業株式会社 | Two-power source load drive fuel cell system and fuel cell vehicle |
| JP2015038882A (en) * | 2014-10-20 | 2015-02-26 | トヨタ自動車株式会社 | Fuel battery system |
| JP2016091647A (en) * | 2014-10-30 | 2016-05-23 | 本田技研工業株式会社 | Control method for fuel cell system and fuel cell automobile |
| JP2016091648A (en) * | 2014-10-30 | 2016-05-23 | 本田技研工業株式会社 | Control method for fuel cell system and fuel cell automobile |
| JP2016092893A (en) * | 2014-10-30 | 2016-05-23 | 本田技研工業株式会社 | Fuel cell system control method and fuel cell vehicle |
| JP2016207435A (en) * | 2015-04-22 | 2016-12-08 | 株式会社デンソー | Fuel cell vehicle |
| JP2017139150A (en) * | 2016-02-04 | 2017-08-10 | トヨタ自動車株式会社 | Fuel cell system |
| JP2018121393A (en) * | 2017-01-23 | 2018-08-02 | 株式会社Subaru | Control device of electric vehicle and electric vehicle |
| US11007893B2 (en) | 2017-01-23 | 2021-05-18 | Subaru Corporation | Control device for electric vehicle and electric vehicle |
| JP2018198213A (en) * | 2018-07-26 | 2018-12-13 | 株式会社デンソー | Fuel cell vehicle |
| JP2021118064A (en) * | 2020-01-23 | 2021-08-10 | 株式会社豊田自動織機 | Fuel cell system |
| JP7370880B2 (en) | 2020-01-23 | 2023-10-30 | 株式会社豊田自動織機 | fuel cell system |
Also Published As
| Publication number | Publication date |
|---|---|
| JP4844556B2 (en) | 2011-12-28 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP4844556B2 (en) | Power supply system | |
| JP4561827B2 (en) | Fuel cell system and boost converter for fuel cell | |
| KR101229337B1 (en) | Fuel cell system | |
| JP2009165245A (en) | Fuel cell system and dc-dc converter | |
| KR101143438B1 (en) | Vehicle power control device | |
| CN104802788B (en) | Motor vehicle driven by mixed power | |
| CN108454419B (en) | Control device for battery system and battery system | |
| JP2009254169A (en) | Power supply system | |
| JP2009165243A (en) | Fuel cell system | |
| JP2020202605A (en) | Power supply system | |
| JP6104635B2 (en) | Electric power system and fuel cell vehicle | |
| JP4930369B2 (en) | Fuel cell system | |
| JP5390765B2 (en) | Fuel cell system | |
| JP6104637B2 (en) | Dual power load drive system and fuel cell vehicle | |
| JP6133623B2 (en) | Dual power load drive system and fuel cell vehicle | |
| JP4556989B2 (en) | Fuel cell power supply | |
| JP6054918B2 (en) | Dual power load drive fuel cell system and fuel cell vehicle | |
| JP2009232548A (en) | Fuel cell system | |
| JP2009165242A (en) | Fuel cell system and dc-dc converter | |
| CN110696752B (en) | Energy efficiency improving method for low-voltage electrical system of pure electric vehicle |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100125 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20101111 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101124 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20110121 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20110913 |
|
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20110926 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141021 Year of fee payment: 3 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 4844556 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| FPAY | Renewal fee payment (event date is renewal date of database) |
Free format text: PAYMENT UNTIL: 20141021 Year of fee payment: 3 |
|
| LAPS | Cancellation because of no payment of annual fees |