以下、本発明の実施形態に係る装置を図面を参照して説明する。
(実施形態1)
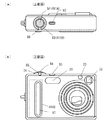
実施形態1に係るデジタルカメラの構成を図1に示す。
実施形態1に係るデジタルカメラ1は、レンズ機構部11と、レンズ鏡筒駆動部12と、焦点レンズ駆動部13と、撮像素子14と、CDS/AGC回路15と、タイミング制御部16と、A/D変換回路(図中、「A/D回路」と記す。)17と、AWB回路(図中、「AWB」と記す。)18と、信号処理回路(図中、「信号処理」と記す。)19と、絞り駆動部20と、ストロボ21と、ストロボ駆動部22と、AF補助光ライト23と、電源制御部24と、HDD記憶装置25と、HDD・IF26と、表示モニタ27と、表示駆動部28と、操作部29と、タッチ検出回路30と、画像バッファメモリ31と、画像処理部32と、圧縮符号化/伸長復号化部33と、画像メモリ34と、外部メモリインタフェース(インタフェースを、図中、「IF」と記す。)35と、LANコネクタ36と、LAN通信インタフェース37と、USBコネクタ38と、USB通信インタフェース39と、制御部40と、を備える。
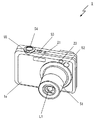
このデジタルカメラ1は、図2に示すように、第1レンズ群L1を備え、レンズ鏡筒51は、この第1レンズ群L1を支持する。
さらに、レンズ鏡筒51の内部には、後述する第2レンズ群L2、第3レンズ群L3が備えられ、レンズ鏡筒51は、この第2レンズ群L2、第3レンズ群L3を支持する。
このレンズ鏡筒51は、伸縮可能なものであり、デジタルカメラ1は、表示モニタ27に撮影前の画像を表示させて操作者であるユーザが撮影を行う撮影状態においてレンズ鏡筒51を繰り出し、撮影を行う前の非撮影状態において、カメラ本体1aにレンズ鏡筒51を沈胴させる。
また、このデジタルカメラ1は、ユーザの手又は指を検出して、ユーザが撮影を行う撮影状態か、撮影を行う前の非撮影状態であるかを判定してレンズ鏡筒51の繰り出し、沈胴を制御する。
さらに、このデジタルカメラ1は、操作部29の操作情報に基づいて、ユーザが撮影を行う撮影状態に移行するか、撮影を行う前の非撮影状態を維持するか、ユーザの操作を事前予測する。
そして、デジタルカメラ1は、この予測に基づいて、レンズ鏡筒51の繰り出し、沈胴を制御する。このようにして、このデジタルカメラ1は、衝撃による第1レンズ群L1、第2レンズ群L2、第3レンズ群L3及びレンズ鏡筒51の損傷を防止する。
図1に示すレンズ機構部11は、焦点距離が可変のズームレンズ光学系である。このレンズ機構部11には、例えば、特許第177932号公報に開示されたものが用いられる。
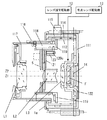
図3は、レンズ鏡筒51が繰り出している状態を示し、図4は、レンズ鏡筒51が沈胴している状態を示す。
この図3、図4に示すように、レンズ機構部11は、前述の第1レンズ群L1と、第2レンズ群L2と、第3レンズ群L3と、絞りSと、ローパスフィルタFと、撮像素子枠111と、固定筒112と、回転環114と、ピニオン115と、外側直進筒116と、内側直進筒117と、カム環118と、直進案内リング119と、退避レンズ群支持枠120と、退避レンズ枠121と、第3レンズ枠122と、トーションばね123と、を備える。
第1レンズ群L1と第2レンズ群L2とは、ズーム用のレンズ群であり、第3レンズ群L3は、フォーカシング用のレンズ群である。絞りSは、露光量を調節するためのものである。
ローパスフィルタFは、偽色、色モアレを低減させるためのものであり、撮像素子14の前面に配置される。
撮像素子枠111は、ローパスフィルタFと撮像素子14とを固定する固定部材である。
尚、Z1軸は、第1レンズ群L1、第2レンズ群L2、第3レンズ群L3、撮像素子14の中心軸であり、Z2軸は、固定筒112、回転環114、外側直進筒116、内側直進筒117の回転中心軸である。
図5(a),(b)は、それぞれ、退避時、撮影時の第2レンズ群L2及び各部の位置関係を示す図であり、この図5(a),(b)に示すように、この撮像素子枠111には、位置制御カム111aが形成されている。
この位置制御カム111aは、退避レンズ枠121の位置を制御するものであり、退避位置保持面と移行傾斜面とを有し、撮像素子枠111のベース部111bから回転中心軸Z2と平行な方向に突出している。
固定筒112は、筒状の固定部材であり、その外周面には径方向突起(図示せず)が形成され、内周面には、Z1軸と平行に直進案内溝(図示せず)が形成されている。
回転環114は、固定筒112の外周に位置し、その内周面には、周方向溝(図示せず)と回転伝達溝(図示せず)とが形成され、外周面にはギア(図示せず)が形成されている。
回転環114の回転伝達溝は、回転中心軸Z2と平行に形成される。また、周方向溝は、固定筒112の径方向突起と係合する溝であり、固定筒112の径方向突起と回転環114の周方向溝とが係合することにより、回転環114は、光軸方向の移動が規制され、固定筒112に回転可能に支持される。
ピニオン115は、回転環114を回転駆動するものであり、回転環114の外周面に形成されたギアと噛み合う。ピニオン115は、正方向又は逆方向に回転可能なものであり、ピニオン115が正方向に回転すると、レンズ鏡筒51が繰り出され、逆方向に回転すると、レンズ鏡筒51が沈胴する。
外側直進筒116は、固定筒112の内側に位置して、固定筒112に支持される。外側直進筒116の外周面には、直進案内突起(図示せず)が突設され、内周面には周方向溝(図示せず)が形成される。
外側直進筒116の直進案内突起は、固定筒112の内周面に形成された直進案内溝に嵌る突起であり、直進案内突起が直進案内溝に嵌ることにより、外側直進筒116は、固定筒112に支持されつつ、回転中心軸Z2方向への進退が可能となる。
内側直進筒117は、第1レンズ群L1を支持するものであり、外側直進筒116の内側に位置し、外側直進筒116に支持される。
内側直進筒117の外周面には、直進案内突起(図示せず)が形成され、内周面には、フォロアピン(図示せず)が突出するように形成されている。外周面の直進案内突起は、外側直進筒116の内周面に形成された直進案内溝に嵌る突起であり、直進案内溝に直進案内突起が嵌ることにより、内側直進筒117は、外側直進筒116に対して回転中心軸Z2方向に直進する。
カム環118は、固定筒112の内側に位置する環状部材である。カム環118の外周面には、フォロアピンとカム溝と径方向突起とが設けられている(いずれも図示せず)。また、内周面には、カム溝と周方向溝とが設けられている(いずれも図示せず)。
フォロアピンは、回転環114の内周面に形成された回転伝達溝に嵌るピンであり、径方向に突出している。フォロアピンが回転伝達溝に嵌って回転環114が回転することにより、カム環118も回転する。
径方向突起は、外側直進筒116の内周面に設けられた周方向溝に対して摺動可能に嵌る突起である。この径方向突起が外側直進筒116の周方向溝に嵌って、カム環118は、回転可能となり、外側直進筒116と結合して光軸方向に移動する。
このカム環118は、回転して最大突出位置まで移動し、最大突出位置に到達するとこの位置で規制される。
直進案内リング119は、カム環118の内側に位置する環状部材である。直進案内リング119の外縁には、直進案内突起(図示せず)が形成され、外周面には、径方向突起(図示せず)が形成されている。また、直進案内リング119には、光軸Z1と平行に延びる複数の直進ガイドバー(図示せず)が備えられている。
直進案内リング119外縁の直進案内突起は、固定筒112の直進案内溝に嵌る突起である。この直進案内突起が固定筒112の直進案内溝に嵌ることにより直進案内リング119は、光軸方向にのみ移動可能となる。
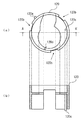
退避レンズ群支持枠120は、退避レンズ枠121を支持するためのものであり、直進案内リング119の内側に位置する。図6(a),(b)は、それぞれ、この退避レンズ群支持枠120の平面図、図6(a)のA−A断面図であり、図6(a)に示すように、退避レンズ群支持枠120の外周面には、フォロア突起120aが、突出するように形成されている。
このフォロア突起120aは、カム環118の内周面に形成されたカム溝に嵌る突起であり、カム環118のカム溝に嵌って、カム環118が回転中心軸Z2方向に移動すると、退避レンズ群支持枠120も回転中心軸Z2方向に進退する。
この退避レンズ群支持枠120には、直進ガイド溝120bが形成されている。この直進ガイド溝120bは直進案内リング119の直進ガイドバーに係合する溝であり、外周面の光軸Z1と平行に形成される。
直進ガイド溝120bと直進案内リング119の直進ガイドバーとが係合することにより、退避レンズ群支持枠120は、直進案内リング119によって、回転中心軸Z2方向に直進案内される。
また、図6(b)に示すように、退避レンズ群支持枠120の内側には、偏心軸120cとストッパ120dとが形成されている。偏心軸120cは、退避レンズ枠121の回動中心となる軸であり、ストッパ120dは、退避レンズ枠121の回動を停止させるためのものである。
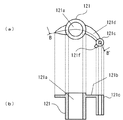
退避レンズ枠121は、第2レンズ群L2を支持するものである。図7(a),(b)は、それぞれ、この退避レンズ枠121の平面図、図7(a)のB−B’断面図である。この図7(a),(b)に示すように、退避レンズ枠121には、レンズ筒121aが形成され、第2レンズ群L2は、レンズ筒121aによって支持される。
また、退避レンズ枠121には、図7(a),(b)に示すように、揺動中心筒121cが形成されている。この揺動中心筒121cは、揺動の中心となる退避レンズ群支持枠120の偏心軸120cに回転自在に嵌る筒であり、レンズ筒121aと揺動中心筒121cとは、揺動アーム121bを介して連結されている。
レンズ筒121aの外周面には、ストッパアーム121dが形成されている。このストッパアーム121dは、レンズ筒121aの突出端の位置を規制するものである。
揺動中心筒121cには、位置制御突起121fが形成されている。この位置制御突起121fは、撮像素子枠111の位置制御カム111aと係合する突起である。
図3、図4に戻り、第3レンズ枠122は、第3レンズ群L3を支持するものである。
トーションばね123は、退避レンズ枠121の揺動中心筒121cと偏心軸120cとの間に介挿され、レンズ筒121aが光軸Z1上に位置するように、退避レンズ枠121を付勢するばねである。
図1に戻り、レンズ鏡筒駆動部12は、レンズ鏡筒51を繰り出したり、沈胴させたりするものであり、このようにレンズ鏡筒51を駆動するモータ(図示せず)を備える。
レンズ鏡筒駆動部12は、制御部40から、レンズ鏡筒51を繰り出す制御信号が供給されてレンズ機構部11のピニオン115を正方向に回転駆動する。
また、レンズ鏡筒駆動部12は、制御部40から、レンズ鏡筒51を沈胴させる制御信号が供給されて、レンズ機構部11のピニオン115を逆方向に回転駆動する。
焦点レンズ駆動部13は、焦点レンズとして第3レンズ群L3の位置を調整するためのものであり、第3レンズ群L3の位置を調整するためのモータ(図示せず)を備える。
撮像素子14は、受光した光の光信号を電気信号に変換して画像信号を出力するものであり、例えば、CCD(Charge Coupled Device;電荷結合素子)又はCMOS(Complementary Metal Oxide Semiconductor)によって構成される。
CDS(Correllated Double Sampling;相関二重サンプリング)/AGC(Automatic Gain Control;自動ゲイン制御)回路15は、撮像素子14が出力した画像信号に含まれる基準レベルと信号レベルとの差分をサンプリングして、出力する画像信号の利得を制御するものである。
タイミング制御部16は、駆動タイミングを設定した駆動パルス、露出値に基づいてシャッタタイミングを設定したシャッタパルス等を、撮像素子14、CDS/AGC回路15に供給することにより、これらの撮像素子14、CDS/AGC回路15を駆動するものである。
A/D変換回路17は、CDS/AGC回路15が出力したアナログの画像信号をデジタルの画像データに変換する回路であり、変換した画像データをAWB回路18に供給する。
AWB(Auto White Balance)回路18は、A/D変換回路17から供給された画像データに対し、白色を基準にして全体の画像の色合いを調整する回路であり、調整した画像データを信号処理回路19に供給する。
信号処理回路19は、AWB回路18から供給された画像データに対して、補間処理、輪郭強調、γ補正、RGBマトリクス処理等の信号処理を行う回路である。信号処理回路19は、信号処理を行った画像データを制御部40に供給する。
絞り駆動部20は、レンズ機構部11の絞りSを駆動するためのものである。
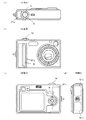
ストロボ21は、光を発する発光源であり、図2、図8(b)に示すようにカメラ本体1aの前面に配置される。
ストロボ駆動部22は、ストロボ21に電圧を印加してストロボ21を発光させるものである。
AF(Auto Focus)補助光ライト23は、暗い場所でピント合わせを行うときに補助光を発光させるものであり、図2、図8(b)に示すようにカメラ本体1aの前面に配置される。
電源制御部24は、デジタルカメラ1の電力源としての電池71から、電力の供給を制御するものである。
HDD(Hard Disk Drive)記憶装置25は、データを記憶するためのものである。
HDD・IF26は、HDD記憶装置25と制御部40との間のデータの入出力を行うものである。
表示モニタ27は、画像を表示する電子ファインダ表示部であり、例えば、図8(c)に示すように、デジタルカメラ1の背面の光学ファインダ52の下に設けられる。
表示駆動部28は、表示モニタ27を表示駆動するものであり、表示メモリ28aを備える。表示メモリ28aは、制御部40から供給されたデータを一時的に記憶するメモリである。
操作部29は、ユーザがデジタルカメラ1を操作するためのボタン、キーからなるものである。操作部29は、このようなボタン、キーとして、図2、図8(a)〜(c)に示すように、電源スイッチ53と、シャッタボタン54と、ズームレバー55と、撮影モードボタン56と、再生モードボタン57と、メニューボタン58と、コントロール部59と、を備える。
電源スイッチ53は、デジタルカメラ1の電源をオン(駆動電力の供給)、オフ(駆動電力の供給停止)するときに操作されるボタンであり、図2、図8(a),(b)に示すように、デジタルカメラ1の上面に配置される。
シャッタボタン54は、ユーザが撮影を行うときに押下されるボタンであり、図2、図8(a)〜(c)に示すように、カメラ本体1aの上部に配置される。
撮影モードボタン56、再生モードボタン57は、それぞれ、モードを撮影モード、再生モードに切り替えるためのボタンである。この撮影モードは、第1レンズ群L1、第2レンズ群L2、第3レンズ群L3を通して得られる画像を、実際に撮影が行われる前に表示モニタ27に表示させるモードである。
再生モードは、撮影によって得られた画像を表示モニタ27に表示させるモードである。撮影モードボタン56、再生モードボタン57は、図8(c)に示すように、デジタルカメラ1の背面に設けられる。
メニューボタン58は、撮影条件又は再生条件を設定するときに操作されてメニュー画面を表示するためのキーであり、例えば、図8(c)に示すように、デジタルカメラ1の背面に設けられる。メニュー画面に表示されるメニューには、EV補正メニュー、AE制御メニューがある。
コントロール部59は、デジタルカメラ1の機能を選択、設定するためのものであり、図8(c)に示すように、デジタルカメラ1の背面に設けられる。このコントロール部59は、アップキー59Uと、ダウンキー59Dと、左キー59Lと、右キー59Rと、セットキー59Sと、からなる。
アップキー59U、ダウンキー59D、左キー59L、右キー59Rは、それぞれ、表示モニタ27に表示された画像、メニュー項目を上下左右に移動させて画像、メニュー項目を選択するためのキーである。セットキー59Sは、選択された画像、メニュー項目を指定するためのキーである。尚、右キー59Rも選択された画像、メニュー項目を指定するためにも用いられる。
ズームレバー55は、画角の拡大、縮小を行うためのレバーキーであり、例えば、図2、図8(a),(b)に示すように、ベゼル部(bezel)83に直結されている。
ベゼル部83は、シャッタボタン54の周囲に形成されてシャッタボタン54を上下動可能なように保持しつつ、誤ってシャッタボタン54が押下されるのを防止するためのものであり、シャッタボタン54を中心に回動するようになっている。ズームレバー55が操作されると、ベゼル部83も回動して画角が拡大、縮小される。
操作部29は、これらのキー、ボタンが操作されると、この操作情報を制御部40に供給する。
また、操作部29は、図9に示すように、シャッタ機構部81と、シャッタ信号検出部82と、を備える。
シャッタ機構部81は、シャッタボタン54の押下によりシャッタ信号を生成するためのものであり、シャッタボタン54と、ベゼル部83と、スプリング84と、電極85a,85b,85c,85dと、パッド85e,85fと、シャッタ信号検出部82と、を備える。
スプリング84は、シャッタボタン54とカメラ本体1aとの間に介挿されて、シャッタボタン54を押し上げる方向に付勢するものである。
電極85a,85b,85c,85dは、シャッタボタン54が押下されたときにシャッタ信号を取り出すための導電性の電極であり、電極85a,85cは、それぞれ、端子p1,p2を介してシャッタ信号検出部82に接続される。電極85b,85dは、端子p3を介してシャッタ信号検出部82に接続される。
電極85aと電極85bとは、シャッターボタン54の半押し(ハーフシャッタ)検出用の電極であり、電極85cと電極85dとは、シャッターボタン54の全押し検出用の電極である。
パッド85e,85fは、それぞれ、電極85a,85cを付勢するためのものである。
シャッタボタン54には、鍔部54aが形成され、パッド85eは、シャッタボタン54が押下されることにより、この鍔部84aによって付勢され、電極85aを付勢する。
パッド85fは、シャッタボタン54がさらに押下されることにより、シャッタボタン54の下端部54bによって付勢され、電極85dを付勢する。
シャッタ信号検出部82は、シャッタ信号を検出するためのものである。電極85aがパッド85eによって付勢され、電極85aと電極85bとが接触すると、シャッタ信号検出部82は、端子p1と端子p3との短絡を検出する。
シャッタ信号検出部82が端子p1と端子p3との短絡を検出すると、操作部29は、シャッタボタン54が半押しされた旨の操作情報を制御部40に供給する。
シャッタ信号検出部82は、電極85cがパッド85fによって付勢され、電極85cと電極85dとが接触すると、シャッタ信号検出部82は、端子p2と端子p3との短絡を検出する。
シャッタ信号検出部82が端子p2と端子p3との短絡を検出すると、操作部29は、シャッタボタン54が全押しされた旨の操作情報を制御部40に供給する。
図1に示すタッチ検出回路30は、ユーザの指のシャッタボタン54への接触を検出する回路である。タッチ検出回路30は、図9に示すように、シャッタボタン54とベゼル部83との静電容量の変化を検出することにより、ユーザの指のシャッタボタン54への接触を検出する。
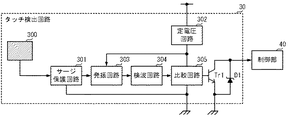
タッチ検出回路30は、図10に示すように、タッチ電極300と、サージ保護回路301と、定電圧回路302と、発振回路303と、検波回路304と、比較回路305と、トランジスタTr1と、ツェナーダイオードD1と、を備える。
このタッチ検出回路30は、シャッタボタン54とベゼル部83との静電容量の変化を、発振信号の周波数の変化として検出するように構成されている。
電極300は、図9に示すシャッタボタン54、ベゼル部83に組み込まれた電極であり、露出した電極である。
サージ保護回路301、定電圧回路302、発信回路303、検波回路304、比較回路305、トランジスタTr1、ツェナーダイオードD1は、ユーザの指の電極300への接触を検出し、人体検出信号を出力するものである。
サージ保護回路301は、電極300にユーザ(人体)の指が触れたとき、帯電した静電気によって発生するサージからタッチ検出回路30を保護するためのものである。
定電圧回路302は、発振回路303と検波回路304と比較回路305とトランジスタTr1とに定電圧を印加して、各回路を動作させるための回路である。
発振回路303は、合成容量Cxに基づいた周波数で発振させた発振信号を生成するものである。
検波回路304は、発振回路303が生成した発振信号を検波し、合成容量Cxに対応する電圧の検波信号を生成するものである。
比較回路305は、検波回路304が生成した検波信号の信号レベルと、予め設定された設定信号レベルと、を比較してトランジスタTr1をオン、オフするものである。
トランジスタTr1は、NPNバイポーラトランジスタであり、そのべース端子が比較回路305の出力端に接続され、エミッタは接地され、コレクタ端子が出力端子となる。
トランジスタTr1は、比較回路305からトランジスタTr1のベース端子に供給された信号に基づいてオン、オフする。
ツェナーダイオードD1は、トランジスタTr1のコレクタ−エミッタ間電圧をツェナー電圧に制限するためのものである。
シャッタボタン54とベゼル部83との静電容量が増えると、発振回路303で発生させた発振信号の周波数は低くなり、比較回路305がトランジスタTr1のベース端子に印加する電圧も低下する。
ユーザの指がシャッタボタン54に接触しないときは、トランジスタTr1がオンし、接触したときは、オフするように、各部が構成されるものとする。
このように構成されると、ユーザの指がシャッタボタン54に接触したときに、トランジスタTr1がオフし、コレクタ電圧がハイレベルとなる。タッチ検出回路30は、ユーザの指がシャッタボタン54に接触したことを示す人体検出信号として、ハイレベルのセンサ信号を制御部40に供給する。
図1に戻り、画像バッファメモリ31は、画像データを一時的に記憶するためのものである。
画像処理部32は、画像データに対して画像処理を施すためのものである。
圧縮符号化/伸長復号部33は、画像データを圧縮符号化するとともに、圧縮符号化された画像データを伸長復号化するものである。
画像メモリ34は、静止画の画像データと動画の画像データとを記憶するためのものである。
外部メモリ72は、デジタルカメラ1に装着されて画像データ等を記憶するものであり、外部メモリインタフェース部35は、制御部40と外部メモリ72との間のデータの入出力を行うためのものである。
LANコネクタ36は、LANコードを接続するためのものであり、LAN通信インタフェース37は、LANコード、LANコネクタ36を介してデータを送受信するためのものである。
USBコネクタ38は、USBコード、USB機器を接続するためのものであり、USB通信インタフェース39は、USBコネクタ38を介してUSB機器との間でデータを送受信するためのものである。
制御部40は、ユーザの操作に従ってデジタルカメラ1全体を制御するものであり、CPU(Central Processing Unit)とROM(Read Only Memory)とRAM(Random Access Memory)とを備える(いずれも図示せず)。尚、ROMは、プログラムデータ、メニュー処理に用いる画像データ等を記憶する。
制御部40は、デジタルカメラ1の電源がオフしているときに、操作部29から電源スイッチ53が押下された旨の操作情報が供給されると、デジタルカメラ1の電源をオンし、ROMからカメラ制御処理のプログラムデータを読み出して、カメラ制御処理を実行する。
このカメラ制御処理において、レンズ鏡筒駆動部12に制御信号を供給して、レンズ鏡筒51の繰り出し、沈胴を制御する。
尚、制御部40は、レンズ鏡筒51の繰り出しているか、沈胴しているかを判定するため、レンズ鏡筒駆動部12に制御信号を供給する毎にこの制御内容をRAMに記憶する。
また、制御部40は、レンズ鏡筒51を繰り出している時間を計測する時計部(図示せず)を備え、内蔵するROMは、この計測時間に対して予め設定された設定時間を記憶する。この設定時間は、レンズ鏡筒51が繰り出している時間を制限するための時間である。
次に実施形態1に係るデジタルカメラ1の動作を説明する。
電源スイッチ53又は撮影モードボタン56が押下されると、制御部40は、内蔵するROMに記憶されたカメラ制御処理のプログラムデータを読み出し、図11に示すフローチャートに従い、このカメラ制御処理を実行する。
制御部40は、レンズ鏡筒駆動部12に、レンズ鏡筒51を繰り出す制御信号を供給し、この制御内容をRAMに記憶する(ステップS11)。
制御部40は、時間の計測を開始する(ステップS12)。
制御部40は、タッチ検出回路30から供給されたセンサ信号に基づいてシャッタボタン54に指が接触したか否かを判定する(ステップS13)。
制御部40は、タッチ検出回路30からハイレベルのセンサ信号が供給されたとき、シャッタボタン54に指が接触したと判定する(ステップS13;Yes)。この場合、制御部40は、シャッタボタン操作処理を実行する(ステップS14)。
制御部40は、図12に示すフローチャートに従って、このシャッタボタン操作処理を実行する。
制御部40は、時間の計測を停止する(ステップS31)。
制御部40は、RAMに記憶した制御内容を参照してレンズ鏡筒51が繰り出し済みか否かを判定する(ステップS32)。
レンズ鏡筒51が繰り出し済みではないと判定した場合(ステップS32;No)、制御部40は、レンズ鏡筒駆動部12に、レンズ鏡筒51を繰り出す制御信号を供給し、この制御内容をRAMに記憶する。
制御部40は、撮影準備処理を実行する(ステップS34)。
一方、レンズ鏡筒51が繰り出し済みと判定した場合(ステップS32;Yes)、制御部40は、レンズ鏡筒駆動部12には制御信号を供給せずに、撮影準備処理を実行する(ステップS34)。
制御部40は、撮影準備処理として、撮影条件を設定し、設定した撮影条件を、表示駆動部28の表示メモリ28aに供給する。
また、制御部40は、信号処理回路19から供給された画像データをスルー画像として表示駆動部28の表示メモリ28aに供給する。
また、制御部40は、信号処理回路19から供給された画像データの画素毎の輝度値を積分することにより測光処理を行う。
また、制御部40は、信号処理回路19から供給された画像データの色合いに基づいてAWB回路18を制御することにより、AWB処理を行う。
また、制御部40は、操作部29から、ズームレバー55が操作された旨の操作情報が供給されると、レンズ鏡筒駆動部12に、ズームを行う制御信号を供給する。
また、制御部40は、信号処理回路19から供給された画像データのコントラストに基づいて、焦点レンズ駆動部13を制御することにより、AF(Auto Focus)処理を行う。
制御部40は、このように、撮影準備処理を実行すると、タッチ検出回路30から供給されたセンサ信号に基づいてシャッタボタン54から指が離れたか否かを判定する(ステップS35)。
タッチ検出回路30から供給されたセンサ信号がハイレベルであり、シャッタボタン54から指が離れていないと判定した場合(ステップS35;No)、制御部40は、操作部29から供給された操作情報に基づいてシャッタボタン54が半押しされたか否かを判定する(ステップS36)。
シャッタボタン54が半押しされたと判定した場合(ステップS36;Yes)、制御部40は、AFロック処理を行う(ステップS37)。
制御部40は、操作部29から供給された操作情報に基づいてシャッタボタン54が全押しされたか否かを判定する(ステップS38)。
シャッタボタン54が全押しされたと判定した場合(ステップS38;Yes)、制御部40は、撮影処理を実行する(ステップS39)。
制御部40は、撮影処理として、測光処理を行い、露出値を設定し、設定した露出値をタイミング制御部16に供給する。また、制御部40は、撮影が行われた結果、信号処理回路19から画像データが供給されると、この画像データを表示駆動部28の表示メモリ28aに供給する。
また、制御部40は、この画像データを、HDD・IF26を介してHDD記憶装置25に書き込み、外部メモリIF35を介して外部メモリ72にも書き込む。
制御部40は、このように撮影処理を実行すると、計測時間をリセットして時間の計測を開始する(ステップS40)。そして、制御部40は、処理をカメラ制御処理に戻す。
一方、シャッタボタン54が半押しされなかったと判定した場合(ステップS36;No)、制御部40は、再度、撮影準備処理を実行し(ステップS34)、シャッタボタン54から指が離れたか否かを判定する(ステップS35)。
また、シャッタボタン54が全押しされなかったと判定した場合(ステップS38;No)も、制御部40は、再度、撮影準備処理を実行し(ステップS34)、シャッタボタン54から指が離れたか否かを判定する(ステップS35)。
タッチ検出回路30から、ローレベルのセンサ信号が供給されたとき、制御部40は、指がシャッタボタン54から離れたと判定する(ステップS35;Yes)。
この場合、制御部40は、撮影処理を行わずに計測時間をリセットし、時間の計測を開始する(ステップS40)。そして、制御部40は、処理をカメラ制御処理に戻す。
また、タッチ検出回路30から、ローレベルのセンサ信号が供給されて、シャッタボタン54に指が接触していないと判定した場合(ステップS13;No)、制御部40は、操作部29から供給された操作情報に基づいてメニューが選択されたか否かを判定する(ステップS15)。
制御部40は、操作部29から、メニューボタン58が押下された旨の操作情報が供給されると、メニューが選択されたと判定し(ステップS15;Yes)、非撮影状態を維持するとユーザの操作を事前予測する。このように判定すると、制御部40は、メニュー選択処理を実行する(ステップS16)。
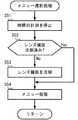
制御部40は、図13に示すフローチャートに従って、このメニュー選択処理を実行する。
制御部40は、時間の計測を停止する(ステップS51)。
制御部40は、RAMに記憶した制御内容を参照してレンズ鏡筒51が沈胴済みか否かを判定する(ステップS52)。
レンズ鏡筒51が沈胴済みではないと判定した場合(ステップS52;No)、制御部40は、予測に基づいて、レンズ鏡筒駆動部12に、レンズ鏡筒51を沈胴させる制御信号を供給して、この制御内容をRAMに記憶し(ステップS53)、メニュー処理を実行する(ステップS54)。
一方、レンズ鏡筒51が沈胴済みと判定した場合(ステップS52;Yes)、制御部40は、レンズ鏡筒駆動部12に制御信号を供給せずに、メニュー処理を実行する(ステップS54)。
制御部40は、メニュー処理として、内蔵するROMからメニュー画面の画像データを読み出して、この画像データを表示駆動部28の表示メモリ28aに供給する。制御部40は、メニュー処理を実行すると、処理をカメラ制御処理に戻す。
メニューが選択されていないと判定した場合(ステップS15;No)、制御部40は、操作部29から供給された操作情報に基づいて再生モードが選択されたか否かを判定する(ステップS17)。
制御部40は、操作部29から、再生モードボタン57が押下された旨の操作情報が供給されると、再生モードが選択されたと判定し(ステップS17;Yes)、非撮影状態を維持するとユーザの操作を事前予測する。このように判定すると、制御部40は、再生モード選択処理を実行する(ステップS18)。
制御部40は、図14に示すフローチャートに従って、この再生モード選択処理を実行する。
制御部40は、時間の計測を停止する(ステップS61)。
制御部40は、RAMに記憶した制御内容を参照してレンズ鏡筒51が沈胴済みか否かを判定する(ステップS62)。
レンズ鏡筒51が沈胴済みではないと判定した場合(ステップS62;No)、制御部40は、予測に基づいて、レンズ鏡筒駆動部12に、レンズ鏡筒51を沈胴させる制御信号を供給して、この制御内容をRAMに記憶する(ステップS63)。
制御部40は、再生処理を実行する(ステップS64)。
一方、レンズ鏡筒51が沈胴済みと判定した場合(ステップS62;Yes)、制御部40は、レンズ鏡筒駆動部12に、制御信号を供給せずに、再生処理を実行する(ステップS64)。
制御部40は、HDD記憶装置25又は外部メモリ72から画像データを読み出して、表示駆動部28の表示メモリ28aに、この画像データを供給する。制御部40は、このように再生処理を実行すると、処理をカメラ制御処理に戻す。
再生モードが選択されていないと判定した場合(ステップS17;No)、制御部40は、操作部29から供給された操作情報に基づいて撮影モードが選択されたか否かを判定する(ステップS19)。
制御部40は、操作部29から、撮影モードボタン56が押下された旨の操作情報が供給されると、撮影モードが選択されたと判定し(ステップS19;Yes)、撮影状態に移行するとユーザの操作を事前予測する。このように判定すると、制御部40は、撮影モード選択処理を実行する(ステップS20)。
制御部40は、図15に示すフローチャートに従って、撮影モード選択処理を実行する。
制御部40は、時間の計測を停止する(ステップS71)。
制御部40は、RAMに記憶した制御内容を参照してレンズ鏡筒51が繰り出し済みか否かを判定する(ステップS72)。
レンズ鏡筒51が繰り出し済みではないと判定した場合(ステップS72;No)、制御部40は、予測に基づいて、レンズ鏡筒駆動部12に、レンズ鏡筒51を繰り出す制御信号を供給し、この制御内容をRAMに記憶する(ステップS73)。
そして、制御部40は、計測時間をリセットし、時間の計測を開始する(ステップS74)。
一方、レンズ鏡筒51が繰り出し済みと判定した場合(ステップS72;Yes)、制御部40は、レンズ鏡筒駆動部12に制御信号を供給せずに、計測時間をリセットし、時間の計測を開始する(ステップS74)。制御部40は、時間の計測を開始すると、処理をカメラ制御処理に戻す。
撮影モードが選択されていないと判定した場合(ステップS19;No)、制御部40は、操作部29から供給された操作情報に基づいて電源オフか否かを判定する(ステップS21)。
制御部40は、操作部29から、電源スイッチ53が押下された旨の操作情報が供給されると、電源オフと判定する(ステップS21;Yes)。このように判定すると、制御部40は、電源オフ操作処理を実行する(ステップS23)。
制御部40は、図16に示すフローチャートに従って、この電源オフ操作処理を実行する。
制御部40は、RAMに記憶した制御内容を参照してレンズ鏡筒51が沈胴済みか否かを判定する(ステップS81)。
レンズ鏡筒51が沈胴済みではないと判定した場合(ステップS81;No)、制御部40は、レンズ鏡筒駆動部12に、レンズ鏡筒51を沈胴させる制御信号を供給して(ステップS82)、電源をオフする(ステップS83)。
一方、レンズ鏡筒51が沈胴済みと判定した場合(ステップS81;Yes)、制御部40は、レンズ鏡筒駆動部12に制御信号を供給せずに、電源をオフする(ステップS83)。制御部40は、電源オフ操作処理を実行すると、処理をカメラ制御処理に戻し、このカメラ制御処理を終了させる。
電源オフではないと判定した場合(ステップS21;No)、制御部40は、無操作処理を実行する(ステップS22)。
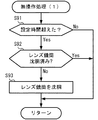
制御部40は、図17に示すフローチャートに従って、この無操作処理(1)を実行する。
制御部40は、レンズ鏡筒51を繰り出している計測時間とROMに記憶された設定時間とを比較して、計測時間が設定時間を超えたか否かを判定する(ステップS91)。
計測時間が設定時間を超えていないと判定した場合(ステップS91;No)、制御部40は、処理をカメラ制御処理に戻す。
計測時間が設定時間を超えたと判定した場合(ステップS91;Yes)、制御部40は、RAMに記憶した制御内容を参照してレンズ鏡筒51が沈胴済みか否かを判定する(ステップS92)。
レンズ鏡筒51が沈胴済みではないと判定した場合(ステップS92;No)、制御部40は、レンズ鏡筒駆動部12に、レンズ鏡筒51を沈胴させる制御信号を供給して、この制御内容をRAMに記憶し(ステップS93)、処理をカメラ制御処理に戻す。
一方、レンズ鏡筒51が沈胴済みと判定した場合(ステップS92;Yes)、制御部40は、レンズ鏡筒駆動部12に制御信号を供給せずに、処理をカメラ制御処理に戻す。
次に、制御部40がこのようなカメラ制御処理を実行したときの各部の動作について説明する。
デジタルカメラ1の電源がオフしているとき、レンズ鏡筒51は沈胴し、図5(a)に示すように、退避レンズ枠121は、退避レンズ群支持枠120の偏心軸120cを中心に回動し、第2レンズ群L2は、その中心が退避光軸Z1’に対応するように退避している。
第2レンズ群L2は、この退避位置で、ローパスフィルタFや撮像素子14の横にオーバーラップし、カメラ本体1aに収納される。
また、外側直進筒116、内側直進筒117、カム環118及び直進案内リング119は、すべてカメラ本体1a内に収納され、レンズ鏡筒51の長さが短くなる。
ユーザが電源スイッチ53を押下すると、レンズ鏡筒駆動部12は、制御部40から、レンズ鏡筒51を繰り出す制御信号が供給されて(ステップS11の処理)、ピニオン115を正方向に回転駆動する。
ピニオン115が正方向に回転すると、回転環114は、所定角度だけレンズ繰り出し方向に回転する。
この回転環114が回転すると、カム環118も回転し、カム環118は、最大突出位置まで突出する。
カム環118が最大突出位置まで突出するのに従い、外側直進筒116、内側直進筒117、カム環118及び直進案内リング119はカメラ本体1aから外部に突出する。
直進案内リング119及び外側直進筒116は、カム環118と一緒に前方に直進移動し、内側直進筒117と退避レンズ群支持枠120とは、光軸方向前方のW(ワイド)端位置に移動する。
退避レンズ群支持枠120が前方に移動すると、図5(b)に示すように、退避レンズ枠121の位置制御突起121fは、位置制御カム111aの退避位置保持面から移行傾斜面に係合する。
退避レンズ枠121の位置制御突起121fが移行傾斜面に係合すると、退避レンズ枠121は、偏心軸120cを中心に、トーションばね123の力によって回動し、第2レンズ群L2が光軸Z1軸上に突出する。
位置制御突起121fは移行傾斜面よりも前方へ移動し、退避レンズ枠121のストッパアーム121dの突出端が退避レンズ群支持枠120のストッパ120dに当接して、退避レンズ枠121の位置が規制される。レンズ鏡筒51は、このようにして繰り出され、デジタルカメラ1は、撮影可能な状態となる。
この位置がワイド端になり、ズームレバー55が操作されると、ズーミングが行われる。レンズ鏡筒駆動部12はピニオン115を回転駆動し、カム環118は光軸Z1方向に移動することなく回動する。
退避レンズ群支持枠120と内側直進筒117とは、カム環118のカム溝に沿って、光軸Z1方向に、設定された軌跡で移動する。そして、ズームレバー55の操作量に対応するように、第2レンズ群L2が位置が設定される。
ユーザがメニューボタン58を押下すると、操作部29は、この操作情報を制御部40に供給し、制御部40は、メニューが選択されたと判定する(ステップS15;Yes)。この場合、制御部40は、ユーザが非撮影状態を維持するとユーザの操作を事前予測して、非時間の計測を停止する(ステップS51の処理)。
レンズ鏡筒51が沈胴済みではないため、制御部40は、レンズ鏡筒51を沈胴させる制御信号をレンズ鏡筒駆動部12に供給し(ステップS26の処理)、レンズ鏡筒駆動部12は、ピニオン115を逆方向に回転する。
カム環118はワイド端から後方に移動する。カム環118が後方に移動すると、退避レンズ群支持枠120、内側直進筒117も後方に移動する。
退避レンズ群支持枠120が後方に移動すると、退避レンズ枠121の位置制御突起121fが撮像素子枠111の位置制御カム111aの移行傾斜面に係合する。
退避レンズ枠121は、トーションばね123の付勢力に抗して退避レンズ群支持枠120の偏心軸120cを中心に回動し、第2レンズ群L2は光軸Z1から退避する。
そして、退避レンズ枠121の位置制御突起121fが位置制御カム111aの退避位置保持面に係合すると、第2レンズ群L2は、その中心が退避光軸Z1’に対応するように退避する。
カム環118はさらに後退し、内側直進筒117と第1レンズ群L1とが後退する。同時に、退避レンズ群支持枠120は、カム溝に従って後退し、退避レンズ枠121の位置制御突起121fは、撮像素子枠111の位置制御カム111aの退避位置保持面との係合状態を維持して後退する。このようにして、レンズ鏡筒51は、図4に示すような沈胴状態になる。
レンズ鏡筒51が沈胴状態になると、制御部40は、メニュー処理を実行する(ステップS54の処理)。
メニュー処理を実行した後に、ユーザが撮影モードボタン56を押下すると、操作部29は、この操作情報を制御部40に供給し、制御部40は、レンズ鏡筒51が繰り出し済みではないと判定する(ステップS72;No)。
制御部40は、このように判定すると、ユーザが撮影状態に移行させるとユーザの操作を事前予測し、レンズ鏡筒駆動部12に、レンズ鏡筒51を繰り出す制御信号を供給する(ステップS73の処理)。レンズ鏡筒駆動部12は、ピニオン115を正方向に回転駆動し、レンズ鏡筒51を繰り出す。
ユーザの指がシャッタボタン54に触れると、タッチ検出回路30は、ハイレベルのセンサ信号を制御部40に供給する。制御部40は、このハイレベルのセンサ信号が供給されて、ユーザの指がシャッタボタン54に触れたと判定する(ステップS13;Yes)。
制御部40は、このように判定すると、レンズ鏡筒51が既に繰り出されているため、レンズ鏡筒駆動部12には制御信号を供給せずに撮影準備処理を行う(ステップS34の処理)。
ユーザが、このまま、シャッタボタン54を半押しすると(ステップS36;Yes)、制御部40は、AFロック処理を行う(ステップS37の処理)。
ユーザがシャッタボタン54を全押しすると、制御部40は、AFロックした状態で撮影処理を実行する(ステップS39の処理)。
撮影が終了すると、制御部40は、計測時間をリセットして時間の計測を開始する(ステップS40の処理)。
ユーザが再生モードボタン57を押下すると、制御部40は、ユーザが非撮影状態を維持するとユーザの操作を事前予測して、時間の計測を停止する(ステップS61の処理)。そして、制御部40は、レンズ鏡筒駆動部12に、レンズ鏡筒51を沈胴させる制御信号を供給する(ステップS63)。レンズ鏡筒駆動部12は、ピニオン115を逆方向に回転駆動し、レンズ鏡筒51は沈胴する。
撮影終了後、ユーザが電源スイッチ53を押下した場合、制御部40は、電源オフと判定し(ステップS21;Yes)、レンズ鏡筒51が沈胴していれば、レンズ鏡筒駆動部12には制御信号を供給せず、制御部40は、電源をオフする(ステップS40の処理)。
レンズ鏡筒駆動部12は、ピニオン115を逆方向に回転駆動し、レンズ鏡筒51を沈胴させる。そして、制御部40は、電源のオフ処理を実行する(ステップS41の処理)。
ユーザが、電源スイッチ53を押下した後、計測時間が設定時間を超えるまでに、何も操作を行わなかったとき(ステップS21;No)、レンズ鏡筒51が繰り出されている場合(ステップS92;No)、制御部40は、レンズ鏡筒駆動部12に、レンズ鏡筒51を沈胴させる制御信号を供給する(ステップS93の処理)。レンズ鏡筒駆動部12は、ピニオン115を逆方向に回転駆動し、レンズ鏡筒51は沈胴する。
以上説明したように、本実施形態1によれば、ユーザの指がシャッタボタン54に接触しなかった場合、メニューボタン58、再生モードボタン57、電源スイッチ53が押下された場合、デジタルカメラ1は、撮影状態ではないと判定して、レンズ鏡筒51を沈胴させるようにした。
従って、不意の落下等により衝撃が加わる前に、レンズ鏡筒51がカメラ本体1a内に収納され、外力が加わったとしても沈胴状態で外力が加わるため、外力等による第1レンズ群L1等、レンズ鏡筒51の損傷を防止することができる。
また、ユーザの指がシャッタボタン54に接触した場合、デジタルカメラ1は、直ちに、レンズ鏡筒51を繰り出す。また、撮影モードボタン56が押下された場合、デジタルカメラ1は、ユーザが撮影状態に移行させるとユーザの操作を事前予測して、レンズ鏡筒51を繰り出す。
このため、レンズ鏡筒51を手動で繰り出すような操作が不要となり、撮影状態であるときには、支障なく撮影を行うことができる。そして、シャッタチャンスを逃すこともない。
一方、再生モードボタン57、メニューボタン58が押下されると、デジタルカメラ1は、ユーザが非撮影状態を維持するとユーザの操作を事前予測して、レンズ鏡筒51を沈胴させる。
このため、撮影状態に移行しないと予測されるときには、すぐにレンズ鏡筒51が沈胴し、落下等の不測の事態による第1レンズ群L1等、レンズ鏡筒51の損傷を防止することができる。
また、ユーザの指の電極への接触を検出することにより、加速度センサ等により、落下、衝撃を検出するよりは、迅速に落下、衝撃に対応することができる。また、タッチ検出回路30の構成も簡易であり、タッチ検出回路30を容易にデジタルカメラ1に組み込むことができる。
(実施形態2)
実施形態2に係るデジタルカメラは、カメラ本体に指を触れたときの筋電位を検出することにより、撮影状態を判別し、レンズ鏡筒の繰り出し、沈胴を制御するようにしたものである。
筋肉は、それを支配する運動神経の興奮によって収縮する。神経の興奮は、神経筋接合部を介して筋繊維に伝わって活動電位を生じさせる。この活動電位が筋電位である。
ユーザが指でシャッタボタン54を押下しようとするとき、あるいは、シャッタボタン54から指を離そうとするとき指の筋電位が変化する。この筋電位の変化を検出することにより、シャッタボタン54がオン、オフされる前に、ユーザの操作を判別することができる。
実施形態2に係るデジタルカメラ1は、図18に示すように、実施形態1のタッチ検出回路30の代わりに、筋電位検出回路41を備え、この指の筋電位の変化を検出する。
筋電位を検出するには、皮膚表面に固定した表面電極を用いて表面の筋電位を検出するのが一般的である。但し、針電極を用いた場合と異なり、皮膚表面が、筋電位の発生源である筋から離れているため、さまざまな電位、周波数、位相の交流信号が時間的に変化しながら加算され、(表面)筋電位は、連続雑音のような電位として観察される。
この(表面)筋電位は、数μV〜数mV程度と非常に低い。筋電位を検出する筋電計は、このようなノイズが重畳した信号から筋電位信号を検出するため、筋電計には、双極誘導法が利用されている。
双極誘導法は、2個の測定電極、1個の参照電極の計3個の電極を設けて表面筋電位を計測する方法である。この参照電極は、不感電極、接地電極とも呼ばれるものである。
この筋電位検出回路41も筋電計と同様に双極誘導法を利用してセンサ信号(筋電位信号)を検出するように構成され、図19に示すように、電極411A,411Bと、参照電極411Cと、差動増幅回路412と、によって構成される。
電極411A,411Bは、筋電計と同様の表面電極であり、それぞれ、図20(a)に示すようなシャッタボタン54、ベゼル部83に相当する。参照電極411Cは、筋電計と同様の参照電極であり、図20(b)に示すように、ユーザがデジタルカメラ1を把持する把持部として、グリップ部60近傍に配置される。
電極411A,411B、参照電極411Cのような表面電極には、電極材として、銀(Ag)を基材として表面に塩化銀(AgCl)を付着させた銀/塩化銀(Ag/AgCl)電極等が用いられる。
このような電極材であれば、汗により電極411A,411B、参照電極411Cの金属との間に分極電位が生じても分極電位が数100μV程度と小さくなるため、筋電位は、安定して検出される。
また、筋電位を計測する場合、電極411A,411B、参照電極411Cには、皮膚表面の湿潤度、皮膚角化層の厚さ等の影響を受けないように、微細な孔が多数設けられた金属、電解質等を含ませた金属等が用いられる。
さらに、電極411A、411Bには、その抵抗値、面積等がほぼ同じものが用いられる。
これは、双極誘導の2個の電極411A,411Bで皮膚との間の抵抗値、面積等が異なると、同相信号がうまく打ち消されず同相ノイズが漏れ、同相信号除去比CMRRが低下するためである。
差動増幅回路412は、電極411A,411Bで検出された筋電位を増幅して、電極411A,411Bに接触したユーザの指の筋電位を検出し、人体検出信号を出力するものである。
差動増幅回路412は、3つの412a,412b,412cと、抵抗Ra,Rb,Rg,R11〜R14と、を備える。この差動増幅回路412は、参照電極411Cの電位に対して電圧+V,−Vでバイアスされる。
オペアンプ412aは、電極411Aの筋電位を増幅するものであり、+(非反転)入力端子は、電極411Aに接続され、−(反転)入力端子は、負帰還抵抗としての抵抗Raを介して出力端子に接続される。
オペアンプ412bは、電極411Bの筋電位を増幅するものであり、+入力端子は、電極411Bに接続され、−(反転)入力端子は、抵抗Rbを介して出力端子に接続される。
抵抗Rgは、利得(ゲイン)を調整するための抵抗であり、抵抗Raと抵抗Rbとの間に接続される。
オペアンプ412cは、オペアンプ412a,412bの出力信号を差動増幅するものであり、その−入力端子は、抵抗R11を介してオペアンプ412aの出力端子に接続され、抵抗R12を介して出力端子に接続される。
オペアンプ412cの+入力端子は、抵抗R13を介してオペアンプ412bの出力端子に接続される。また、オペアンプ412cの+入力端子は、抵抗R14を介して参照電極411Cに接続され、オペアンプ412cは、参照電極411Cの参照電圧Vrefを参照する。
筋電位検出回路41は、オペアンプ412cが出力した電圧を出力電圧Voutとして出力する。
表面筋電位計測に使用する差動増幅器には、数μV〜数mVの信号を増幅するため、十分なダイナミックレンジと100〜10000倍のゲインが要求され、最低感度も10μV程度が要求され、同相信号除去比CMRR(Common Mode Rejection Ratio)は、60〜80dB以上が要求される。また、周波数帯域は、数Hz〜数10kHz程度であり、位相変位が少ないこと等が要求される。
この筋電位検出回路41に用いる差動増幅回路412にも、このような性能を有するものが用いられる。
この差動増幅回路412が出力する信号の電位差eoは、次の式(1)によって表される。
eo=-(r12/r11){1+(ra+rb)/rg}×ei
但し、r12/r1=r14/r13
r11,r12,r13,r14,ra,rb,rg;
それぞれ、抵抗R11,R12,R13,R14,
Ra,Rb,Rgの抵抗値
ei;電極411A−411B間の入力電位差
・・・・(1)
このとき、抵抗値r11〜r14の誤差を±Δとすると、同相信号除去比CMRR(Common Mode Rejection Ratio)は、次の式(2)によって表される。
CMRR≒{1+(ra+rb)/rg}×{1+(r12/r11)}/(4×Δ)
・・・(2)
電極411Aと参照電極411Cとの間に生じる(表面)筋電位、電極411Bと参照電極411Cとの間に生じる筋電位により、オペアンプ412a,412bのそれぞれの出力信号の信号レベルe1,e2の位相差は180度となり、信号レベルe1,e2の位相は、互いに逆相となる。これに対して、筋電位信号にノイズが重畳した場合、このノイズは同相になる。
従って、差動増幅回路412が信号レベルe1と信号レベルe2との差を増幅することにより、同相のノイズは打ち消され、筋電位検出回路41は、逆相の筋電位のみを取得することになる。
図21(a),(b)は、それぞれ、重量300gのデジタルカメラ1x、重量900gのデジタルカメラ1yを示す。また、図22(a)は、ユーザがデジタルカメラ1xを把持して持ち上げたときの筋電位と、グリップ力Fg、ロード力Frと、の変化を示し、図22(b)は、ユーザがデジタルカメラ1yを把持して持ち上げたときの筋電位と、グリップ力Fg、ロード力Frと、の変化を示す。尚、グリップ力Fg、ロード力Fgは、それぞれ、図22(c)に示すように、物を把持する力、物を持ち上げる力を示す。
図22(a),(b)に示すように、筋電位は、デジタルカメラ1x,1yを把持するとき、あるいは、デジタルカメラ1x,1yを離すときに指2を動かすため、変化する。
また、重量が900gのデジタルカメラ1yでは、重量が300gのデジタルカメラ1xと比較して、そのグリップ力Fg、ロード力Fgは大きく、筋電位も大きく変化する。
また、指がシャッタボタン54から離れている場合、ユーザは指を動かしてシャッタボタン54を押下するため、シャッタボタン54を押下するタイミングは、この筋電位が変化した後になる。
制御部40は、筋電位検出回路41から、この筋電位による電位差eoのセンサ信号が供給される。制御部40は、供給されたセンサ信号の電位差eoの変化量を取得し、この変化量と、この変化量に対して予め設定された閾値と、を比較する。尚、閾値は、デジタルカメラ1の重量等に基づいて設定され、ROMに記憶される。
そして、変化量が閾値以下のときは、制御部40は、ユーザの指がカメラ本体1aには触れていないと判定し、変化量が閾値を超えたときは、ユーザの指がカメラ本体1aには触れたと判定する。制御部40は、このように判定してレンズ鏡筒駆動部12を制御する。
以上説明したように、本実施形態2によれば、デジタルカメラ1は、ユーザがカメラ本体1aに指を触れたとき、あるいは、シャッタボタン54から指が離れたときの筋電位を検出することにより、撮影状態を判別するようにした。
従って、シャッタボタン54が実際にオン、オフする前に、撮影状態あるいは撮影動作中か否かを判別することができ、レンズ鏡筒51の繰り出しや沈胴を早めに行うことができる。このため、レンズ鏡筒51の保護を、より確実に行うことができる。
(実施形態3)
実施形態3に係るデジタルカメラは、ユーザがカメラ本体を把持したときの圧力を検出して、撮影状態を判別し、レンズ鏡筒の繰り出し、沈胴を制御するようにしたものである。
実施形態3に係るデジタルカメラ1の構成を図23に示す。このデジタルカメラ1は、感圧回路42を備える。感圧回路42は、人がカメラ本体1aの把持したときの圧力を検出する回路であり、図24(a)に示すように、感圧シート部421(a〜e)と、抵抗値検出部422と、を備える。
感圧シート部421(a〜e)は、図24(b)に示すような感圧センサ421sを複数備えたものである。
この感圧センサ421sは、圧力を検出するものであり、圧力が加わると電気抵抗が減少する特性を有する。各感圧センサ421sは、抵抗値検出部422に接続される。
感圧シート部421a〜421eは、裏面(デジタルカメラ1側)に接着剤等が塗布されて貼付可能なものであり、いずれも、ユーザがカメラ本体1aを把持したときの圧力が加わる箇所に貼付される。
感圧シート部421aは、例えば、図25(a)に示すように、デジタルカメラ1の上面のシャッタボタン54とベゼル部83との近傍に貼付される。
感圧シート部421bは、例えば、図25(b)に示すように、デジタルカメラ1の前面のグリップ部60近傍に貼付される。
感圧シート部421cは、例えば、図25(c)に示すように、デジタルカメラ1の背面のメニューボタン58、コントロール部59の近傍に貼付される。
感圧シート部421d,eは、例えば、図25(d)に示すように、いずれもデジタルカメラ1の側面に貼付される。
抵抗値検出部422は、各感圧センサ421sの抵抗値を検出するものである。感圧回路42は、抵抗値検出部422が検出した抵抗値の変化を示すセンサ信号を制御部40に供給する。
制御部40は、感圧回路42から供給されたセンサ信号に基づいて撮影状態か否かを判別し、判別結果に基づいてレンズ鏡筒駆動部12に制御信号を供給する。
以上説明したように、本実施形態3によれば、感圧シート部421a〜421eをカメラ本体1aの各部に貼付し、デジタルカメラ1は、ユーザがカメラ本体1aを把持したときの圧力を検出して、撮影状態を判別するようにした。
従って、感圧シート部421a〜421eをカメラ本体1aの各部に貼付するだけで、シャッタボタン54等の構造やカメラ本体1aの基本構成を変えたり、デザイン上の制約を大きくしたりすることなく、容易にレンズ保護機能を追加することができる。
(実施形態4)
実施形態4に係るデジタルカメラは、カメラ本体の把持、指掛かりを検出し、検出結果に基づいて沈胴位置を調整するようにしたものである。
ユーザの指がシャッタボタン54に触れていなくても、撮影状態に移行することが予測される場合には、レンズ鏡筒51を収納状態と繰り出し状態との間の状態にしておけば、非撮影状態から撮影状態に移行するとき、すぐにレンズ鏡筒51を繰り出すことができる。
一方、撮影状態になることが全く予測されない場合、レンズ鏡筒51を収納状態にしておけば、レンズ鏡筒51をより確実に保護することができる。
実施形態4に係るデジタルカメラ1は、このような観点から、ユーザの指のカメラ本体1aへの接触位置を検出し、その結果に基づいて沈胴位置を調整するように構成されている。
実施形態4に係るデジタルカメラ1の構成を図26に示す。
実施形態4に係るデジタルカメラ1は、把持検出回路43と指掛かり検出回路44とを備える。
把持検出回路43は、グリップ部60近傍に設けられ、カメラ本体1aを把持するユーザの手を検出する回路である。指掛かり検出回路44は、シャッタボタン54近傍に設けられ、シャッタボタン54近傍へのユーザの指の指掛かりを検出する回路である。
把持検出回路43、指掛かり検出回路44は、ともに、図27に示すように、人体検出部431と、抵抗R11,R12,R13と、スイッチSw1と、を備える。
スイッチSW1は、把持検出回路43、指掛かり検出回路44の動作又は動作の停止を設定するためのスイッチであり、その一端は、電源に接続される。
抵抗R11〜R13は、電流制限抵抗であり、抵抗R11の一端は、スイッチSW1の一端に接続され、抵抗R12の一端は、抵抗R11の他端に接続され、抵抗R12の他端は接地される。また、抵抗R13の一端は、電源に接続される。
人体検出部431は、ユーザの手又は指を検出するものであり、発光ダイオードD2と、フォトトランジスタTr2とによって構成される。
発光ダイオードD2は、発光源として、赤外線を発する発光素子であり、そのアノードは、抵抗R11と抵抗R12との接続点に接続され、カソードは、接地される。
フォトトランジスタTr2は、反射した赤外光を受光して、この受光した赤外光による光電流を増幅するフォトトランジスタである。フォトトランジスタTr2のコレクタは、抵抗R13の他端に接続され、エミッタは、接地される。
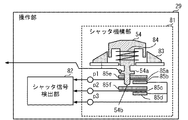
把持検出回路43の人体検出部431は、図28(b)に示すように、カメラ本体1aのグリップ部60近傍に設けられ、指掛かり検出回路44の人体検出部431は、図28(a)に示すように、カメラ本体1aの上面のシャッタボタン54とベゼル部83との近傍に設けられる。
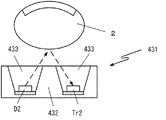
把持検出回路43、指掛かり検出回路44のそれぞれの発光ダイオードD2とフォトトランジスタTr2とは、図29に示すように、赤外光不透過性の樹脂432の凹部に載置され、赤外光透過性の樹脂433によって覆われる。
樹脂432の凹部は、すり鉢状の形状を有し、これにより、発光ダイオードD2の赤外光が、近接したユーザの指2又は手に照射され、フォトトランジスタTr2は、指2又は手で反射した赤外光を受光する。
ユーザの指2又は手が人体検出部431に近接すると、フォトトランジスタTr2は指2又は手で反射した赤外光を受光し、フォトトランジスタTr2のコレクタ電圧はローレベルとなる。従って、指2又は手が近接したとき、把持検出回路43、指掛かり検出回路44は、それぞれ、ローレベルのセンサ信号を制御部40に供給する。
制御部40は、実施形態1と同様にカメラ制御処理を実行し、操作が行われなかったと判定した場合、無操作処理(2)を実行する。
制御部40は、この処理において、把持検出回路43、指掛かり検出回路44から供給されたセンサ信号に基づいて、ユーザの指2又は手がカメラ本体1aに触れたか否かを判定し、制御部40は、図30に示すような制御を行う。
この図30に示すように、把持検出回路43、指掛かり検出回路44から、ともにハイレベルのセンサ信号が供給された場合、あるいは、それぞれ、ハイレベル、ローレベルのセンサ信号が供給された場合、制御部40は、少なくともユーザがカメラ本体1aを把持していないと判定する。
この場合、制御部40は、撮影状態ではないと判定し、レンズ鏡筒51を沈胴させる制御信号をレンズ鏡筒駆動部12に供給して、第2レンズ群L2の中心が退避光軸Z1’に対応するまで第2レンズ群L2を退避させる。この第2レンズ群L2の中心が退避光軸Z1’に対応する位置を収納位置とする。
把持検出回路43、指掛かり検出回路44から、それぞれ、ローレベル、ハイレベルのセンサ信号が供給された場合、制御部40は、ユーザがカメラ本体1aを把持したと判定する。
この場合、制御部40は、まだ、撮影状態ではないものの、すぐに撮影状態になる可能性ありと判定し、レンズ鏡筒51を沈胴させる制御信号をレンズ鏡筒駆動部12に供給し、レンズ鏡筒を繰り出す繰り出し位置とカメラ本体1a内に収納する収納位置との中間位置として、光軸方向前方のW端位置まで第2レンズ群L2を退避させる。この第2レンズ群L2を退避させる光軸方向前方のW端位置を後退位置とする。
把持検出回路43、指掛かり検出回路44から、いずれもハイレベルのセンサ信号が供給された場合、制御部40は、撮影状態になったか、あるいは撮影状態が継続していると判定する。
この場合、制御部40は、レンズ鏡筒51を繰り出し状態とする。即ち、制御部40は、レンズ鏡筒51が沈胴している場合、レンズ鏡筒駆動部12に、レンズ鏡筒51を繰り出す制御信号を供給し、レンズ鏡筒51が繰り出されている場合、現状態を維持する。
次に実施形態4に係るデジタルカメラ1の動作を説明する。
電源スイッチ53又は撮影モードボタン56が押下されると、制御部40は、内蔵するROMに記憶されたカメラ制御処理のプログラムデータを読み出し、図11に示すフローチャートに従い、このカメラ制御処理を実行する。
制御部40は、操作部29から供給された操作情報に基づいて、電源オフではないと判定した場合(ステップS21;No)、制御部40は、図31に示すフローチャートに従って、この無操作処理(2)を実行する。
制御部40は、RAMに記憶した制御内容を参照してレンズ鏡筒51が繰り出し状態か否かを判定する(ステップS101)。
レンズ鏡筒51が繰り出し状態と判定した場合(ステップS101;Yes)、制御部40は、指掛かり検出回路44から供給されたセンサ信号に基づいてカメラ本体1aの上部から指が離れたか否かを判定する(ステップS102)。
カメラ本体1aの上部から指が離れていないと判定した場合(ステップS102;No)、制御部40は、処理をカメラ制御処理に戻す。
カメラ本体1aの上部から指が離れたと判定した場合(ステップS102;Yes)、制御部40は、把持検出回路43から供給されたセンサ信号に基づいて、カメラ本体1aが把持されているか否かを判定する(ステップS103)。
カメラ本体1aが把持されていると判定した場合(ステップS103;Yes)、制御部40は、レンズ鏡筒駆動部12に、レンズ鏡筒51を後退位置まで沈胴させる制御信号を供給し、この制御内容をRAMに記憶する(ステップS104)。そして、制御部40は、処理をカメラ制御処理に戻す。
カメラ本体1aが把持されていないと判定した場合(ステップS103;No)、制御部40は、レンズ鏡筒駆動部12に、レンズ鏡筒51を収納位置まで沈胴させる制御信号を供給して電源をオフし、この制御内容をRAMに記憶する(ステップS105)。
制御部40は、時間の計測を停止して(ステップS106)、電源をオフし、処理をカメラ制御処理に戻す。
一方、レンズ鏡筒51が繰り出し状態ではないと判定した場合(ステップS101;No)、即ち、レンズ鏡筒51が沈胴していると判定した場合、制御部40は、把持検出回路43から供給されたセンサ信号に基づいて、カメラ本体1aが把持されているか否かを判定する(ステップS107)。
カメラ本体1aが把持されていないと判定した場合(ステップS107;No)、制御部40は、処理をカメラ制御処理に戻す。
カメラ本体1aが把持されていると判定した場合(ステップS107;Yes)、制御部40は、指掛かり検出回路44から供給されたセンサ信号に基づいて、カメラ本体1aの上部に指が掛かったか否かを判定する(ステップS108)。
カメラ本体1aの上部に指が掛かっていると判定した場合(ステップS108;Yes)、制御部40は、レンズ鏡筒駆動部12に、レンズ鏡筒51を繰り出す制御信号を供給し、この制御内容をRAMに記憶する(ステップS109)。
制御部40は、計測時間をリセットして時間の計測を開始する(ステップS110)。そして、制御部40は、処理をカメラ制御処理に戻す。
一方、カメラ本体1aの上部に指が掛かっていないと判定した場合(ステップS108;No)、制御部40は、RAMに記憶した制御内容を参照してレンズ鏡筒51が後退位置まで沈胴しているか否かを判定する(ステップS111)。
レンズ鏡筒51が後退位置まで沈胴していないと判定した場合(ステップS111;No)、即ち、レンズ鏡筒51が収納位置まで沈胴していると判定した場合、制御部40は、処理をカメラ制御処理に戻す。
レンズ鏡筒51が後退位置まで沈胴していると判定した場合(ステップS111;Yes)、制御部40は、計測時間が設定時間を超えたか否かを判定する(ステップS112)。
計測時間が設定時間を超えていないと判定した場合(ステップS112;No)、制御部40は、処理をカメラ制御処理に戻す。
計測時間が設定時間を超えたと判定した場合(ステップS112;Yes)、制御部40は、レンズ鏡筒駆動部12に、レンズ鏡筒51を収納位置まで沈胴させる制御信号を供給して電源をオフし、この制御内容をRAMに記憶し(ステップS113)、処理をカメラ制御処理に戻す。
このように、制御部40が無操作処理(2)を実行することにより、レンズ鏡筒51は状況に応じて段階的に沈胴する。
例えば、ユーザがデジタルカメラ1の電源スイッチ53をオンし、撮影モードを選択すると、レンズ鏡筒駆動部12は、レンズ鏡筒51を繰り出す。
ユーザがカメラ本体1aの上部から指を離すと、指掛かり検出回路44は、ローレベルのセンサ信号を制御部40に供給する。
ユーザがカメラ本体1aを把持したままでいれば、把持検出回路43は、ローレベルのセンサ信号を制御部40に供給し、制御部40は、レンズ鏡筒駆動部12に、レンズ鏡筒51を後退位置まで沈胴させる制御信号を供給する(ステップS104の処理)。
レンズ鏡筒駆動部12は、この制御信号が供給されてレンズ鏡筒51を後退位置まで沈胴させる。
ユーザがカメラ本体1aの上部から指を離した状態で、計測時間が設定時間を超えると、制御部40は、レンズ鏡筒駆動部12に、レンズ鏡筒51を収納位置まで沈胴させる制御信号を供給し(ステップS113の処理)、レンズ鏡筒駆動部12は、レンズ鏡筒51を収納位置まで沈胴させる。また、電源もオフする。
また、ユーザが、撮影モードを選択したまま、デジタルカメラ1から手を離し、デジタルカメラ1を机に載置したり、デジタルカメラ1を首にかけたりすると、指掛かり検出回路44、把持検出回路43は、ともにハイレベルのセンサ信号を制御部40に供給する。
制御部40は、このようなセンサ信号が供給されて、レンズ鏡筒駆動部12に、レンズ鏡筒51を収納位置まで沈胴させる制御信号を供給する(ステップS105の処理)。レンズ鏡筒駆動部12は、この制御信号が供給されてピニオン115を逆方向に回転駆動し、レンズ鏡筒51を収納位置まで沈胴させる。
このように、ユーザが撮影モードを選択したにもかかわらず、デジタルカメラ1から手を離した場合、レンズ鏡筒51が収納位置まで沈胴しているので、デジタルカメラ1が落下しても、レンズ鏡筒51の破損は防止される。
次に、ユーザが、机からデジタルカメラ1を取り上げて、カメラ本体1aのグリップ部60を把持すると、把持検出回路43は、ローレベルのセンサ信号を制御部40に供給する。
また、ユーザが、カメラ本体1aの上部に指をかけると、指掛かり検出回路44は、この指掛かりを検出して、制御部40に、ローレベルのセンサ信号を供給する。
制御部40は、このセンサ信号が供給されて、レンズ鏡筒駆動部12に、レンズ鏡筒51を繰り出す制御信号を供給し(ステップS109の処理)、レンズ鏡筒駆動部12は、ピニオン115を正方向に回転駆動してレンズ鏡筒51を繰り出す。従って、レンズ鏡筒51は、ユーザがシャッタボタン54に触れる前に繰り出され、迅速に撮影状態に移行することができる。
以上説明したように、本実施形態4によれば、デジタルカメラ1は、カメラ本体1aの把持、指掛かりを検出し、ユーザの指がカメラ本体1aの上部から離れたときは、レンズ鏡筒51を後退位置まで沈胴させるようにした。
従って、ユーザの指がシャッタボタン54に触れていない場合でも、ユーザの指がシャッタボタン54に触れることを早期に検出することができ、ユーザの指がカメラ本体1aの上部に触れれば、すぐに撮影することができ、起動時間を短縮することができる。
また、デジタルカメラ1は、レンズ鏡筒51を後退位置まで沈胴させたまま、計測時間が設定時間を超えると、レンズ鏡筒51を収納位置まで沈胴させ、電源もオフとなるので、節電することもできる。
尚、本発明を実施するにあたっては、種々の形態が考えられ、上記実施形態に限られるものではない。
例えば、レンズ機構部11は、図3〜図7に示すような構成のものに限られるものではなく、沈胴式のものであれば、どのようなものであってもよい。
また、シャッタ機構部81は、図9に示すようなものに限られるものではなく、例えば、図32に示すようなシャッタ機構部81であってもよい。
このシャッタ機構部81のシャッタボタン54、ベゼル部83は、それぞれ、電極54e、電極84eを備える。この電極54e、電極84eは、タッチ検出回路30に接続される。
次に、上記実施形態1のタッチ検出回路30は、図10に示すようなものに限られるものではなく、シャッタボタン54、ベゼル部83と、タッチ検出回路30aの接地側端子と、の間の静電容量の変化を検出することにより、ユーザの指のカメラ本体1aへの接触を検出するように構成されてもよい。
図33は、このようなタッチ検出回路30aを示すものである。タッチ電極300(シャッタボタン54とベゼル部83)とタッチ検出回路30aの接地側端子との間の静電容量をCx1、タッチ検出回路30aと接地大地との間の容量をC11、ユーザの指と接地大地との間の容量をC12、ユーザの指とタッチ電極300との間の容量をC13とすると、各容量間の関係は、次の式(3)で表される。
1/Cx1=(1/C11)+(1/C12)+1/C13) ・・・(3)
一般に、容量C11は数100pF、容量C12は約100〜300pF程度であるのに対し、容量C13は、数pFであり、ユーザの指がタッチ電極300に触れたときの容量C13の変化は、ごくわずかである。また、この容量C11〜C13は、安定的ではなく、湿度や環境等の変化によっても大きく変動する。
しかし、容量C13は、容量C11や容量C12と比較して十分に小さいため、容量C11〜C13が同じ割合で変化した場合、静電容量Cx1に対して容量C13の変化が支配的になる。このため、タッチ検出回路30aは、この静電容量Cx1の変化を計測することにより、指がタッチ電極300に触れたことを検出することができる。
また、タッチ検出回路30は、図34に示すように構成されたタッチ検出回路30bであってもよい。このタッチ検出回路30bは、電圧計測部306と、抵抗Rcと、コンデンサCcと、コンデンサCrと、を備える。
電圧計測部306は、タッチ電極300の電圧を計測するものである。電圧計測部306は、端子Aと端子Bとを備え、端子Bはタッチ電極300に接続される。
コンデンサCcは、電圧計測部306の端子A,B間に接続される。抵抗RcとコンデンサCcとは、コンデンサCrに電圧を印加するためのものであり、抵抗Rcの一端は、電圧計測部306の端子Aに接続される。コンデンサCcの一端は、抵抗Rcの他端に接続され、コンデンサCcの他端は、接地される。
タッチ検出回路30bの端子Aに印加される電圧をVa、端子Bに印加される電圧をVbとする。また、静電容量Cx2は、タッチ電極300(シャッタボタン54とベゼル部83)と接地大地との間の静電容量を示す。
このように構成された回路は、図35(a)に示す回路と等価になる。この電圧Vbは、次の式(4)によって表される。
Vb=Va×(cr/(cr+cx2))
但し、cr:静電容量Crの容量値
cx2:静電容量Cx2の容量値
・・・(4)
静電容量Cx2の容量値cx2が変化することにより、電圧Vbも図35(b)に示すように変化し、cx2=crになったとき、電圧Vbは、電圧Vaの1/2になる。
式(4)を変形すると、静電容量cx2は、次の式(5)によって表される。
cx2=cr×((Va-Vb)/Vb) ・・・(5)
従って、この式(5)により、タッチ検出回路30bは、電圧Va,Vbを計測することにより、静電容量Cx2の容量値cx2を取得することができる。
タッチ検出回路30bは、取得した静電容量Cx2の容量値cx2を制御部40に供給し、制御部40は、供給された容量値cx2と予め設定された閾値とを比較して、静電容量cx2が、この閾値を超えたとき、ユーザの指がタッチ電極300に触れたと判定する。
また、タッチ検出回路30は、図36(a),(b)に示すように、2つのタッチ電極300a,300b間の静電容量を充電する時間を計測することによって、ユーザの指2がタッチ電極300a,300bに触れたことを検出するように構成されたタッチ検出回路30cであってもよい。
タッチ電極300a,300bは、シャッタボタン54、ベゼル部83に対応するものであり、金属等の導電性部材によって形成される。このタッチ電極300a,300bは、樹脂等の誘電体物質によって形成されたカバー層315によって覆われているものとする。
図36(b)に示すように、ユーザの指2がカバー層315に触れると、ユーザの指2とタッチ電極300aとの間の静電容量C31、ユーザの指2とタッチ電極300bとの間の静電容量C32は増大する。
図36(a),(b)に示すタッチ検出回路30cは、図37に示すように、定電流源311と、コンパレータ312と、放電スイッチSW2と、パルス幅変調器313と、タイマ314と、を備え、この2つのタッチ電極300a,300b間の静電容量の充電時間を計測する。
図37に示す静電容量Csは、タッチ電極300a,300b間の静電容量C31,C32を含むものである。尚、タッチ電極300bは接地される。
定電流源311は、電圧Vddの電源に接続されて、この静電容量Csに定電流を供給するものである。タッチ電極300aは、定電流源311と静電容量Csとの間に接続される。
放電スイッチSW2は、静電容量Csを放電するためのスイッチであり、その一端は、コンパレータ312の一端に接続され、他端は、接地される。
コンパレータ312は、定電流源311と静電容量Csとの間の電圧Vcと予め設定された基準電圧Vbgとを比較して、比較結果に基づいて放電スイッチSW2をオン、オフ制御するものである。コンパレータ312の一端は、タッチ電極300aに接続され、他端には、基準電圧Vbgが印加される。
パルス幅変調器313は、コンパレータ312から出力されたパルス信号Scのパルス数をカウントすることによりパルス幅変調を行うものである。パルス幅変調器313には、カウント値の上限を設定する上限値iが供給される。
タイマ314は、パルス幅変調器313が出力した出力信号Spが立ち上がっている時間をカウントするものである。タイマ314がカウントしたカウント値をCountとして、タイマ314は、このカウント値Countを制御部40に供給する。
タイマ314には、図38(a)に示すようなシステムクロックCLKが供給される。
尚、図38(b1)〜(f1)は、ユーザの指2がタッチ電極300a,300bに触れていないときの各部の信号波形を示し、図38(b2)〜(f2)は、ユーザの指2がタッチ電極300a,300bに触れたときの各部の信号波形を示す。
図38(b1)、(b2)に示すように、コンパレータ312は、電極300aの電圧Vcが基準電圧Vbgを超えたときは、放電スイッチSW2をオンし、基準電圧Vbg以下になったときは、放電スイッチSW2をオフする。
静電容量Csは、放電スイッチSW2がオンしたときに、放電スイッチSw2を介して放電し、放電スイッチSW2がオフして定電源源311により充電される。
コンパレータ312は、放電スイッチSW2をオン、オフすることにより、図38(c1)、(c2)に示すようなパルス信号Scを出力する。尚、コンパレータ312が放電スイッチ2をオン、オフしてから静電容量Csが充放電されるまでには、タイムラグがある。
パルス幅変調器313は、図38(d1)、(d2)に示すように、リセットされて出力信号Spを立ち上げ、パルス信号Scのパルス数をカウントし、そのカウント値が上限値iになると出力信号Spを立ち下げる。
タイマ314は、図38(f1)、(f2)に示すように、出力信号Spが立ち上がっている間、システムクロックCLKの数をカウントする。
図36(b)に示すように、ユーザの指2がタッチ電極300a,300bに触れると、図38(b2)、(c2)に示すように、静電容量C31,C32により、電圧Vc、パルス信号Scの周期は、それぞれ、ユーザの指2がタッチ電極300a,300bに触れていないときと比較して、大きくなる。
このため、ユーザの指2がタッチ電極300a,300bに触れたときのカウント値Count=n2は、図38(f2)に示すように、ユーザの指2がタッチ電極300a,300bに触れなかったときのカウント値Count=n1よりも大きくなる。
制御部40が内蔵するROMには、このカウント値Countに対して予め設定されたカウント閾値が記憶され、制御部40は、カウント値Countとカウント閾値とを比較する。そして、制御部40は、カウント値Countがカウント閾値を超えると、ユーザの指2がタッチ電極300a,300bに近接したと判定する。
次に、実施形態2に示す筋電位検出回路41は、必ずしも双極誘導法を利用したものでなくてもよく、参照電極を省略したものであってもよい。
図39に示すように、この筋電位検出回路41aは、ボルテージフォロア回路414と、差動増幅回路415と、HPF(ハイパスフィルタ)416と、LPF(ローパスフィルタ)417と、ノッチフィルタ418と、によって構成される。
ボルテージフォロア回路414は、ゲイン1のインピーダンス変換回路であり、オペアンプ414a,414bを備える。
オペアンプ414aの−端子(反転入力端子)は出力端子に接続され、+端子は、電極411Aに接続される。また、オペアンプ414aの−端子は出力端子に接続され、+端子は、電極411Bに接続される。
差動増幅回路415は、電極411Aの電圧と電極411Bの電圧との差を増幅するものであり、オペアンプ415aと、抵抗R21〜R24と、を備える。ボルテージフォロア回路414のオペアンプ414aの出力端子は、抵抗R21を介してこのオペアンプ415aの−入力端子に接続される。また、ボルテージフォロア回路414のオペアンプ414bの出力端子は、抵抗R22を介してこのオペアンプ415aの+入力端子に接続される。
抵抗R23は負帰還抵抗であり、その一端は、オペアンプ415aの−端子に接続され、他端は、オペアンプ415aの+端子に接続される。抵抗R24の一端は、オペアンプ415aの+入力端子に接続され、他端は接地される。
HPF416、LPF417、ノッチフィルタ418は、電極411A,411B、あるいは、配線に用いられるリード線(図示せず)の位置が変化することによるノイズを除去するフィルタである。
HPF416は、数Hz以下の低周波ノイズを除去し、LPF417は、数kHz以上の高周波ノイズを除去する。ノッチフィルタ418は、50Hz、60Hzの交流ノイズを除去する。
この差動増幅回路415の出力電圧eoは、次の式(6)によって表される。
eo=−(r22/r21)×ei
但し、(r24/r21)=(r24/r23)
r21,r22,r23,r24:それぞれ、抵抗R21,R22,R23,R24の抵抗値
・・・(6)
また、CMRRは、次の式(7)によって表される。
CMRR≒(r22/r21){1+(r24/r23)}/((r24/r23)−(r22/r21))
但し、((r24/r23)−(r22/r21))は絶対値
・・・(7)
このように、筋電位検出回路41aでは、1電源方式として参照電極が不要となり、またボルテージフォロア回路414を設けることにより、入力インピーダンスが高くなるため、電解ペースト等も不要となる。
このため、電極411A,411Bに、Ag/AgCl電極等の特殊電極を用いる必要もなく、これ以外の金属電極が用いられても筋電位の発生の有無を安定して検出できる。
また、上記実施形態2における筋電位検出回路41の電極411A,411B,411Cは、同等に触れるような隣接位置に配置されるのであれば、必ずしも同心円状の2重電極である必要はなく、デジタルカメラ1の構成、意匠デザイン等に合わせた形状であってもよい。例えば、方形、異なる形のものとしてもよい。但し、この場合でも、2個の電極の電気抵抗、面積等は、ほぼ同じとする。
また、電極411A,411Bは、シャッタボタン54の表面や周辺に設ける代わりに、シャッタボタン54が押下されるときの指の根元に近いカメラ本体1aの側面上部等に設けられてもよい。
次に、実施形態3における感圧回路42は、図24に示すような構成のものに限られるものではなく、例えば、図40に示すような感圧回路42aであってもよい。
この感圧回路42aは、感圧センサ423と、電圧検出回路424と、を備える。
感圧センサ423は、図24に示す感圧センサ151sと同様、圧力を検知するものであり、感圧シート部421には、複数の感圧センサ423が配置される。
感圧センサ423は、図40に示すように、圧電素子423a,423bと、電極層423c,423d,423eと、によって構成される。
圧電素子423a,423bは、両側から圧力が加えられると電荷を発生させるものであり、例えばポリフッ化ビニリデン等の高分子圧電材、窒化アルミニウムの薄膜等によって形成される。圧電素子423a,423bは、それぞれ、電極層423cと電極層423dとの間、電極層423dと電極層423eとの間に介挿される。
電極層423c,423d,423eは、圧電素子423a,423bに発生した電荷により生成された電位を取得するためのものであり、導体によって形成される。
電極層423c,423eは、ともに接地され、電極層423dは、電圧検出回路424に接続される。
電圧検出回路424は、感圧センサ423の電極層423dの電位と接地電位との間の電圧を検出するものである。電圧検出回路424は、検出電圧を制御部40に供給する。
また、このような感圧センサ423の代わりに、図41に示すような感圧センサ425が用いられてもよい。この感圧センサ425は、図41(a),(b)に示すように、シート材425aと、表面電極425bと、裏面電極425cと、によって構成される。
シート材425aは、例えば、ゴムのように、弾力性を有する誘電体物質によって形成されたものである。
表面電極425b、裏面電極425cは、ともに導電性部材によって形成され、一定方向に延びる電極である。
図41(b)に示すように、シート材425aの表面には、複数の表面電極425bが密着し、各表面電極425bは、一定間隔で平行に配置されている。
図41(b)に示すように、シート材425aの裏面には、複数の裏面電極425cが密着し、各裏面電極425cは、表面電極425bとは異なる方向に延びるように一定間隔で平行に配置されている。
図41(c)に示すように、感圧センサ425がユーザの指によって押されると、押された点におけるシート材425aの容量が変化する。
シート材425aの容量は押下されることにより変化し、表面電極425bと裏面電極425cとが重なった各位置の容量は、感圧値として、図41(d)に示すような2次元パターンとして得られる。感圧回路42は、この2次元パターンの感圧値を制御部40に供給する。
次に、デジタルカメラ1は、三脚に固定支持された場合、レンズ鏡筒51が損傷する可能性が少ないため、沈胴処理をオフするように構成されてもよい。
この場合、デジタルカメラ1は、三脚のネジ穴部に、三脚が取り付けられたことを検出し、三脚検出信号を出力するスイッチ(図示せず)を備え、制御部40は、三脚が取り付けられてこのスイッチがオンして、このことを示す信号を出力したとき、レンズ鏡筒駆動部12の制御を停止する。
また、デジタルカメラ1は、レンズ鏡筒駆動部12の制御又は制御の停止の選択を受け付けて上記保護機能をオン、オフするように構成されてもよい。この場合、制御部40が内蔵するROMは、図42(a)〜(d)に示すようなメニューの画像データを予め記憶する。
撮影モードが設定されて表示モニタ27が、図42(a)に示すような画像を表示しているときに、メニューボタン58が押下されると、操作部29は、この操作情報を制御部40に供給する。
制御部40は、この操作情報が供給されて、図42(a)に示すような画像データをROMから読み出し、読み出した画像データを表示駆動部28の表示メモリ28aに供給する。
表示モニタ27は、この画像データを表示メモリ28aから読み出してこのメニューを表示する。このメニューには、撮影設定タブ、画質設定タブ、設定タブが含まれ、各タブを指定することにより、各メニューが指定される。
ユーザによってコントロール部59の右キー59R又は左キー59Lが操作されて設定タブが選択され、セットキー59S又は右キー59Rが押下されてこの項目が指定されると、操作部29は、この操作情報を制御部40に供給する。
制御部40は、この操作情報が供給されて、図42(c)に示すような設定メニューの画像データをROMから読み出し、読み出した画像データを表示駆動部28の表示メモリ28aに供給する。
表示モニタ27は、この画像データを表示メモリ28aから読み出してこの設定メニューを表示する。
この設定メニューは、3頁からなるものとして、ユーザによってコントロール部59のアップキー59U又はダウンキー59Dが押下されて2/3頁が選択されると、操作部29は、この操作情報を制御部40に供給する。
制御部40は、この操作情報が供給されて、図42(d)に示すような2/3頁の設定メニューの画像データをROMから読み出し、読み出した画像データを表示駆動部28の表示メモリ28aに供給する。
表示モニタ27は、この画像データを表示メモリ28aから読み出して2/3頁の設定メニューを表示する。この設定メニューには、レンズ保護機能の項目が含まれている。
ユーザによって、コントロール部59のアップキー59U又はダウンキー59Dが操作されてレンズ保護機能が選択され、セットキー59S又は右キー59Rが押下されてこの項目が指定されると、操作部29は、この操作情報を制御部40に供給する。
制御部40は、この操作情報が供給されて、レンズ保護機能の各項目の画像データをROMから読み出し、読み出した画像データを表示駆動部28の表示メモリ28aに供給する。
表示モニタ27は、この画像データを表示メモリ28aから読み出して、レンズ保護機能の「オート」、「カスタム1」、「カスタム設定」、「切」の各項目を開いた画像を表示する。
ユーザによってコントロール部59のアップキー59U又はダウンキー59Dが操作されて「オート」又は「カスタム1」が選択され、セットキー59S又は右キー59Rが押下されてこの項目が指定されると、操作部29は、この操作情報を制御部40に供給する。
制御部40は、この操作情報が供給されて、この選択を受け付け、レンズ保護機能をオンし、レンズ鏡筒51の繰り出し、沈胴制御を行う。
一方、ユーザによってコントロール部59のアップキー59U又はダウンキー59Dが操作されて「切」が選択され、セットキー59S又は右キー59Rが押下されてこの項目が指定されると、操作部29は、この操作情報を制御部40に供給する。
制御部40は、この操作情報が供給されて、この選択を受け付け、レンズ保護機能をオフし、レンズ鏡筒駆動部12の制御を停止させ、レンズ鏡筒51の繰り出し、沈胴制御を停止する。
上記実施形態4では、把持検出回路43と指掛かり検出回路44とに、図27に示す回路を備えるようにした。しかし、把持検出回路43と指掛かり検出回路44とは、このような構成に限られるものではなく、例えば、図10、図33、図34、図37にそれぞれ示すタッチ検出回路30、30a,30b,30c、図19、図39にそれぞれ示す筋電位検出回路41,41a、図24、図40にそれぞれ示す感圧回路42、42aを用いてもよい。さらに、把持検出回路43と指掛かり検出回路44とは、これらを組み合わせたものであってもよい。
また、上記実施形態1〜4に示す検出回路に限らず、人体を検出できるものであれば、焦電(熱線)センサ、視線検出センサ等が用いられてもよい。
1・・・デジタルカメラ、11・・・レンズ機構部、30・・・タッチ検出回路、40・・・制御部、41・・・筋電位検出回路、42・・・感圧回路、43・・・把持検出回路、44・・・指掛かり検出回路、51・・・レンズ鏡筒、54・・・シャッタボタン