JP2008086659A - Image processing method and panoramic image photographing device - Google Patents
Image processing method and panoramic image photographing device Download PDFInfo
- Publication number
- JP2008086659A JP2008086659A JP2006273302A JP2006273302A JP2008086659A JP 2008086659 A JP2008086659 A JP 2008086659A JP 2006273302 A JP2006273302 A JP 2006273302A JP 2006273302 A JP2006273302 A JP 2006273302A JP 2008086659 A JP2008086659 A JP 2008086659A
- Authority
- JP
- Japan
- Prior art keywords
- image
- panoramic image
- cross
- template
- gain
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
- 238000003672 processing method Methods 0.000 title claims description 9
- 238000000034 method Methods 0.000 claims description 69
- 230000008569 process Effects 0.000 claims description 54
- 238000003384 imaging method Methods 0.000 claims description 35
- 238000012545 processing Methods 0.000 claims description 33
- 230000033001 locomotion Effects 0.000 claims description 21
- 238000003860 storage Methods 0.000 claims description 14
- 230000001172 regenerating effect Effects 0.000 claims 1
- 238000003325 tomography Methods 0.000 claims 1
- 210000004513 dentition Anatomy 0.000 description 80
- 230000036346 tooth eruption Effects 0.000 description 80
- 238000005259 measurement Methods 0.000 description 59
- 238000005457 optimization Methods 0.000 description 48
- 230000008707 rearrangement Effects 0.000 description 23
- 238000004364 calculation method Methods 0.000 description 15
- 230000002093 peripheral effect Effects 0.000 description 14
- 230000006870 function Effects 0.000 description 11
- 230000008859 change Effects 0.000 description 10
- 238000013507 mapping Methods 0.000 description 10
- 230000004044 response Effects 0.000 description 10
- 238000001514 detection method Methods 0.000 description 9
- 230000007246 mechanism Effects 0.000 description 9
- 230000005540 biological transmission Effects 0.000 description 7
- 210000000214 mouth Anatomy 0.000 description 6
- 238000004891 communication Methods 0.000 description 5
- 238000003745 diagnosis Methods 0.000 description 5
- 239000010408 film Substances 0.000 description 5
- 238000012805 post-processing Methods 0.000 description 5
- 230000007423 decrease Effects 0.000 description 4
- 238000002360 preparation method Methods 0.000 description 4
- 238000012937 correction Methods 0.000 description 3
- 238000013480 data collection Methods 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 230000003902 lesion Effects 0.000 description 3
- 238000012986 modification Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 230000005855 radiation Effects 0.000 description 3
- 230000000694 effects Effects 0.000 description 2
- 210000003128 head Anatomy 0.000 description 2
- 230000006872 improvement Effects 0.000 description 2
- 230000002452 interceptive effect Effects 0.000 description 2
- 239000000463 material Substances 0.000 description 2
- 238000002601 radiography Methods 0.000 description 2
- 238000011282 treatment Methods 0.000 description 2
- 229910004613 CdTe Inorganic materials 0.000 description 1
- 208000001132 Osteoporosis Diseases 0.000 description 1
- 208000028911 Temporomandibular Joint disease Diseases 0.000 description 1
- 238000010521 absorption reaction Methods 0.000 description 1
- NIXOWILDQLNWCW-UHFFFAOYSA-N acrylic acid group Chemical group C(C=C)(=O)O NIXOWILDQLNWCW-UHFFFAOYSA-N 0.000 description 1
- 210000003484 anatomy Anatomy 0.000 description 1
- 210000000988 bone and bone Anatomy 0.000 description 1
- 210000001715 carotid artery Anatomy 0.000 description 1
- 238000006243 chemical reaction Methods 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 238000013170 computed tomography imaging Methods 0.000 description 1
- 239000000470 constituent Substances 0.000 description 1
- 235000021403 cultural food Nutrition 0.000 description 1
- 230000003247 decreasing effect Effects 0.000 description 1
- 238000009826 distribution Methods 0.000 description 1
- 229940079593 drug Drugs 0.000 description 1
- 239000003814 drug Substances 0.000 description 1
- 230000001747 exhibiting effect Effects 0.000 description 1
- 210000001061 forehead Anatomy 0.000 description 1
- 208000019622 heart disease Diseases 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000001788 irregular Effects 0.000 description 1
- 238000012423 maintenance Methods 0.000 description 1
- 239000011159 matrix material Substances 0.000 description 1
- 239000002184 metal Substances 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 210000001738 temporomandibular joint Anatomy 0.000 description 1
- 239000010409 thin film Substances 0.000 description 1
- 238000013519 translation Methods 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
Images






































Landscapes
- Apparatus For Radiation Diagnosis (AREA)
Abstract
Description
本発明は、被検体の特定部位、例えば歯列などのパノラマ画像を撮影するパノラマ画像撮影装置及びパノラマ撮影における画像処理方法に係り、とくに、デジタル量のX線透過データからパノラマ画像を生成すると共に、そのパノラマ画像をテンプレートを用いて読影するようにした画像処理方法、及び、その画像処理方法を実施するパノラマ画像撮影装置に関する。 The present invention relates to a panoramic image photographing apparatus for photographing a panoramic image of a specific part of a subject, for example, a dentition, and an image processing method in the panoramic photographing, and particularly generates a panoramic image from digital X-ray transmission data. The present invention relates to an image processing method in which the panoramic image is read using a template, and a panoramic image photographing apparatus that performs the image processing method.
近年の食文化や生活スタイルの変化も相俟ってか、歯の治療を受ける人は益々多くなってきており、歯科の専門家からは、歯の定期健診や早期治療の必要性が頻繁に勧告されている。歯の治療を行なう場合、多くは、歯(歯列)や歯茎の状態を調べるためのX線撮影を行う。このX線撮影は、従来では、X線フィルムを使って歯茎部分の局所的な投影像を得るものが多かったが、これに代わる方法として、或いは、その併用として、X線CTスキャナや歯科専用の歯科用パノラマ画像撮影装置などが使用されている。 With the recent changes in food culture and lifestyle, the number of people receiving dental treatments is increasing, and dental specialists frequently require regular dental examinations and early treatment. Has been recommended. In the case of treating teeth, in many cases, X-ray imaging is performed to check the state of teeth (dentition) and gums. Conventionally, this X-ray imaging has often obtained a local projection image of the gum part using an X-ray film. However, as an alternative method or a combination thereof, an X-ray CT scanner or a dedicated dentistry is used. A dental panoramic image photographing apparatus is used.
X線CTスキャナは、一般化されているCT撮影法を単に顎部分の撮影に適用するものであって、このスキャナによる収集画像から再構成した歯列に沿ったパノラマ画像の解像度はそれほど高いものにならず、またメタルアーチファクトの影響が大きく、歯列の全体を診るためといった利用法に止まっている。 The X-ray CT scanner simply applies a generalized CT imaging method to the imaging of the jaw part, and the resolution of the panoramic image along the dentition reconstructed from the acquired image by this scanner is so high In addition, the influence of metal artifacts is large, and the usage is limited to examining the entire dentition.
一方、歯科用パノラマ画像撮影装置は、X線源及びX線検出器の対を被験者の顎部分を挟むように位置させ、その対を顎部分の周囲で動かしてX線透過データを収集し、このデータから歯列に対する所定断面に沿ったパノラマ画像を生成するものである。この歯科用パノラマ画像撮影装置の一例として、引用文献1に記載の装置が知られている。
On the other hand, the dental panoramic imaging apparatus positions the pair of the X-ray source and the X-ray detector so as to sandwich the jaw part of the subject, and moves the pair around the jaw part to collect the X-ray transmission data, A panoramic image along a predetermined cross section for the dentition is generated from this data. As an example of this dental panoramic image photographing apparatus, an apparatus described in the cited
この引用文献1には、デジタル式のパノラマ画像撮影装置(発明の名称は「デジタルパノラマX線撮影装置」)の例が示されている。このパノラマ画像撮影装置は、被験者を挟んで対向して配置したX線源とX線像検出部とを被験者の周りに一体的に旋回させる旋回駆動手段を備える。X線源は、X線管と、このX線管から曝射されたX線をスリットビーム状に絞るコリメータとを備える。X線像検出部は、入射X線量に応じたデジタル量の電気信号を出力するX線CCDセンサなどのX線検出器を備える。さらに、このパノラマ画像撮影装置は、X線検出器により収集された画像情報をフレーム画像として逐次記憶する記憶手段と、この記憶手段から所定の時間間隔で画像情報を順次読み出し、連続する画像情報の中を像が移動する方向に関して、読み出した画像情報を所定距離ずつシフトさせながら加算し、画像情報の読出し間隔とシフト量に応じた任意断面のパノラマ画像を形成する画像処理手段とを備えている。これにより、X線フィルムを使用しなくても、患者の歯列に沿った断面のパノラマ画像をパソコンなどのモニタ上に診断用の画像として提供できる。
This cited
しかしながら、このパノラマ画像撮影装置の場合、標準として予め定めた歯列に沿った馬蹄形の標準面(標準断面)に焦点が合うように撮影がなされるだけであるので、その標準面以外の断面を診たい場合、また撮影を再度、実行する必要がある。再撮影は患者の負担になるばかりか、X線被曝量も多くなる。また、医師にとっても、操作上の負担が多くなるばかりか、患者スループットも低下する。 However, in the case of this panoramic image photographing device, since photographing is performed so as to focus on a horseshoe-shaped standard surface (standard cross section) along a predetermined dentition as a standard, a cross section other than the standard surface is taken. If you want to see it again, you will need to take the picture again. Re-imaging not only burdens the patient but also increases the amount of X-ray exposure. In addition, for the doctor, not only the operational burden increases, but the patient throughput also decreases.
そこで、近年、撮影前に、予め用意された複数の標準面の中からその患者に最適と思われる標準面を選択し、その選択した標準面に焦点を合わせてX線撮影系を移動させるデジタル形のパノラマ画像撮影装置も臨床に使用されるようになっている。
一方、歯列の撮影画像を表示する技術の一つとして、引用文献2に記載されているテンプレートの使用がある。これは、口内撮影装置で撮影した被験者の歯列に関する複数の複数の部分的な画像を、その歯列の配置に対応させて作成した複数のテンプレートに配置して読影、保存、及び管理の便宜を図ろうとするものである。
Therefore, in recent years, a digital plane that selects a standard plane that seems to be optimal for the patient from a plurality of standard planes prepared in advance and moves the X-ray imaging system while focusing on the selected standard plane before imaging. Shaped panoramic imaging devices are also being used clinically.
On the other hand, as one of the techniques for displaying a photographed image of a dentition, there is a use of a template described in
しかしながら、上述した引用文献1に記載された装置を初めとする各種の歯科用パノラマ画像撮影装置によるデジタルパノラマ撮影を以ってしても、焦点が最適化されたボケの少ない断面像を迅速に提供するという点で、解決しなければならない点が多い。つまり、被験者の歯列について、観察したい断面の位置を3次元的に自在に変更し、その変更された位置の断面像に焦点を最適化させたボケのより少ない状態で提供して欲しいというニーズがあるが、それには全く程遠いことである。標準面とは異なる断面の画像を診たいときには、再度、撮影を実行することが必要になり、前述した患者の負担、X線被曝量の増加、歯科医の負担増、及び患者スループットの低下の面から難がある。
However, even with digital panoramic imaging using various dental panoramic imaging apparatuses such as the apparatus described in the above-mentioned cited
一方、前述した引用文献2に記載されたテンプレートについてはそれ自体では有効性を発揮している。つまり、このテンプレートはそれぞれの歯科医または歯科診療所でカスタマイズ可能である。このため、このカスタマイズされたテンプレートに、口内撮影装置で撮影したデジタル断面画像を納めて読影(観察)、保存、及び管理することができる。しかしながら、このテンプレートの場合、撮影したデジタル断面画像を貼り付けて使用するだけの機能に終始しており、機能不足が指摘されている。
On the other hand, the template described in the cited
本発明は、上述した従来のデジタルパノラマ撮影が抱えている状況に鑑みてなされたもので、患者の歯列に沿った任意断面に沿ってX線撮影したデジタル量のパノラマ画像のデータを用いて、その歯列の観察したい断面の位置を3次元的に自在に変更し、その変更された位置の断面像に焦点を最適化させたボケのより少ない状態で提供するとともに、それらの断面像の持つ3次元的な位置情報の有用性を倍化させて、単なる画像保管に止まらないテンプレート機能を持たせたパノラマ画像撮影装置を提供することを、その目的とする。 The present invention has been made in view of the situation of the above-described conventional digital panoramic radiography, and uses digital panoramic image data obtained by X-ray radiography along an arbitrary cross section along a patient's dentition. The position of the cross section of the dentition can be freely changed three-dimensionally, and the cross-sectional image of the changed position is provided with less blur with optimized focus, and An object of the present invention is to provide a panoramic image photographing apparatus having a template function that is not limited to simple image storage by doubling the usefulness of the three-dimensional position information possessed.
また、本発明は、上述した焦点を最適化したボケの少ない断面像を提供するとともに、その断面像の持つ3次元的な位置情報の有用性を倍化させて、単なる画像保管に止まらないテンプレート機能を発揮することができる画像処理方法を提供することをも、その目的とする。 In addition, the present invention provides a cross-sectional image with less blur that optimizes the focus described above, and doubles the usefulness of the three-dimensional position information of the cross-sectional image, so that the template is not limited to mere image storage. Another object of the present invention is to provide an image processing method capable of exhibiting a function.
上述した目的を達成するため、本発明に係るパノラマ撮影装置の一態様によれば、X線を曝射するX線源と、入射するX線に応じたデジタル量の電気信号を一定のフレームレートで出力する検出器と、前記X線源及び前記検出器の対を、対象物を挟んで互いに対向させた状態で当該対象物の周りを移動させる移動駆動手段と、この移動駆動手段が前記X線源及び前記検出器を前記対象物の周りを移動させることに伴って当該検出器が前記フレームレートで出力する電気信号をフレームデータとして順次記憶する記憶手段と、この記憶手段に記憶されている前記フレームデータに基づいて、予め指定された所望断層面のパノラマ画像を生成するパノラマ画像生成手段と、前記パノラマ画像のデータから、前記所望断層面のパノラマ画像のうちの指定された複数の部分領域それぞれの、前記移動駆動手段によって前記X線源及び前記検出器が移動される空間上の位置に応じた最適焦点の部分断面像を生成する部分断面像生成手段と、前記対象物の撮影部位の属性に関連付けて2次元的に所定のフォーマットで配置された複数の貼付け領域から成るテンプレートを有し、当該テンプレートの前記複数の貼付け領域に前記複数の部分断面像を貼り付けて表示及び保存するテンプレート処理手段と、を備えたことを特徴とする。 In order to achieve the above-described object, according to one aspect of the panoramic imaging apparatus according to the present invention, an X-ray source that emits X-rays and a digital electric signal corresponding to the incident X-rays at a constant frame rate. And a moving drive means for moving the X-ray source and the detector pair around the object in a state where the X-ray source and the detector pair are opposed to each other with the object sandwiched therebetween, Storage means for sequentially storing, as frame data, electrical signals output by the detector at the frame rate as the radiation source and the detector are moved around the object, and stored in the storage means Panorama image generation means for generating a panoramic image of a desired tomographic plane designated in advance based on the frame data; and from the panoramic image data, A partial cross-sectional image generating means for generating a partial cross-sectional image of an optimum focus corresponding to a position in a space where the X-ray source and the detector are moved by the movement driving means for each of the plurality of defined partial areas; A template comprising a plurality of pasting areas that are two-dimensionally arranged in a predetermined format in association with the attribute of the imaging region of the object, and the plurality of partial cross-sectional images are pasted on the plurality of pasting areas of the template; And a template processing means for displaying and saving.
また、本発明に係るパノラマ画像撮影装置の画像処理方法によれば、X線を曝射するX線源と、入射するX線に応じたデジタル量の電気信号を一定のフレームレートで出力する検出器との対を、対象物を挟んで互いに対向させた状態で当該対象物の周りを移動させ、この移動に伴って前記検出器が所定のフレームレートで出力する電気信号をフレームデータとして順次記憶し、この記憶した前記フレームデータに基づいて、予め指定された所望断層面のパノラマ画像を生成するパノラマ画像撮影装置の画像処理方法であり、前記パノラマ画像のデータから、前記所望断層面のパノラマ画像のうちの指定された複数の部分領域それぞれの、前記移動駆動手段によって前記X線源及び前記検出器が移動される空間上の位置に応じた最適焦点の部分断面像を生成し、前記対象物の撮影部位の属性に関連付けて2次元的に所定のフォーマットで配置された複数の貼付け領域から成るテンプレートの当該複数の貼付け領域に前記複数の部分断面像を貼り付けて表示及び保存する、ことを特徴とする。 In addition, according to the image processing method of the panoramic image photographing apparatus according to the present invention, an X-ray source that emits X-rays, and a detection that outputs a digital signal corresponding to the incident X-rays at a constant frame rate. A pair of detectors are moved around the object in a state of facing each other with the object interposed therebetween, and electrical signals output by the detector at a predetermined frame rate along with the movement are sequentially stored as frame data. And a panoramic image photographing apparatus image processing method for generating a panoramic image of a desired tomographic plane designated in advance based on the stored frame data. The panoramic image of the desired tomographic plane is obtained from the panoramic image data. Of each of a plurality of designated partial regions of the lens according to the optimum focal point corresponding to the position on the space where the X-ray source and the detector are moved by the movement driving means. A surface image is generated, and the plurality of partial cross-sectional images are pasted on the plurality of pasting regions of a template including a plurality of pasting regions that are two-dimensionally arranged in a predetermined format in association with the attribute of the imaging region of the object. It is characterized by being attached and displayed.
以下、添付図面を参照して、本発明を実施するための最良の形態(実施形態)を説明する。 The best mode (embodiment) for carrying out the present invention will be described below with reference to the accompanying drawings.
図1〜39を参照して、本発明に係るパノラマ画像撮影装置の一実施形態を説明する。 With reference to FIGS. 1 to 39, an embodiment of a panoramic image photographing apparatus according to the present invention will be described.
図1に、この実施形態に係るパノラマ画像撮影装置1の外観を示す。同図に示すように、このパノラマ画像撮影装置1は、被験者(患者)Pからパノラマ画像生成のためのグレイレベルの原画像データを例えば被験者の立位の姿勢で収集する筐体11と、この筐体11が行うデータの収集を制御し、その収集したデータを取り込んでパノラマ画像を生成し、かつ、操作者(医師、技師)との間でインターラクティブにパノラマ画像の後処理を行うための、コンピュータで構成される制御・演算装置12とを備える。
FIG. 1 shows an external appearance of a panoramic
筐体11は、スタンド部13と、このスタンド部13に対して上下動可能な撮影部14とを備える。スタンド部13は、床上に固定して置かれるベース21と、このベース21に立設された支柱部22とを備える。この支柱部22は、本実施形態にあっては、角柱状に形成されており、その側面の1つに、撮影部14が所定範囲で上下動可能に取り付けられている。
The
ここで、説明の便宜のため、支柱部22の長手方向、すなわち上下方向をZ軸とするXYZ直交座標系を設定する。なお、後述する2次元のパノラマ画像については、その横方向をx軸、縦方向をy軸と表記する。
Here, for convenience of explanation, an XYZ orthogonal coordinate system is set in which the longitudinal direction of the
撮影部14は、側面からみて、略コ字状を成す上下動ユニット23と、この上下動ユニット23に回転(回動)可能に支持された回転ユニット24とを備える。上下動ユニット23は、支柱部22の内部に設置された駆動機構31(例えば、モータ及びラック&ピニオン)を介して、高さ方向の所定範囲に渡ってZ軸方向(縦方向)に移動可能になっている。この移動のための指令が、制御・演算装置12から駆動機構31に出される。
The imaging unit 14 includes a
上下動ユニット23は、前述したように、その一方の側面からみて略コ字状を成し、上下それぞれの側の上側アーム23A及び下側アーム23Bと、その上側、下側アーム23A,23Bを繋ぐ縦アーム23Cとが一体に形成されている。縦アーム23Cが、前述した支柱部22に上下動可能に支持されている。このアーム23A〜23Cのうち、上側アーム23Aと縦アーム23Cとが協働し内部空間を画成している。上側アーム23Aの内部には、回転駆動用の回転駆動機構30(例えば、電動モータ及び減速ギヤなど)が設置されている。この回転駆動機構30は、制御・演算装置12から回転駆動用の指令を受ける。回転駆動機構30の出力軸、すなわち電動モータの回転軸は、上側アーム23Aから下側(Z軸方向下側)に突出するように配置されており、この回転軸に、回転ユニット24が回転可能に結合されている。つまり、回転ユニット24は、上下動ユニット23に垂下されており、回転駆動機構30の駆動に付勢されて回転する。
As described above, the
一方、下側アーム23Bは、上側アーム23Aと同一方向に所定長さを有して延設されており、その先端部にチンレスト25が形成されている。このチンレスト25には、マウスピース26が着脱自在に取り付けられる。このマウスピース26を、被験者Pが咥える。このため、チンレスト25及びマウスピース26が被験者Pの口腔部の固定機能を果たす。
On the other hand, the lower arm 23B is extended to have a predetermined length in the same direction as the
回転ユニット24は、その使用状態において、その一方の側面からみて略コ字状に形成された外観を有し、その開放端側を下側に向けて回転自在に上側アーム23Aのモータ出力軸に取り付けられている。詳しくは、横方向、すなわちXY平面内で略平行に回転(回動)する横アーム24Aと、この横アーム24Aの両端部から下方(Z軸方向)に伸びた左右の縦アーム(第1の縦アーム、第2の縦アーム)24B,24Cとを一体に備える。この横アーム24及び左右の第1、第2アーム24B,24Cはデータ収集に重要な役割を担っており、そのために必要な機構、部品は、それらのアーム24A〜24Cが画成する内部空間に装備されており、制御・演算装置12の制御下で駆動及び動作するようになっている。
The rotating
具体的には、第1の縦アーム24Bの内部の下端部に放射線源としてのX線管31が装備されており、その出射窓からX線を第2の縦アーム24Cに向けて曝射可能になっている。一方、第2の縦アーム24Cの内部の下端部に放射線検出手段としての、X線検出素子を2次元スリット状(例えば、64×1500のマトリクス状)に配置したデジタル形X線検出器32が装備されており、この入射窓から入射するX線を検出する。この検出器32は、一例として、CdTeライン検出器(例えば、横6.4mm×縦150mm)で構成されている。この検出器32は、その縦方向をZ軸方向に一致させて縦方向に配置される。この検出器32の入射口IWには、検出器32への散乱X線を遮断して入射X線を実際の収集用の窓(例えば3.5mm幅の窓;したがって、検出器32の横方向の有効幅は約3.5mm)に絞るスリット状のコリメータ33(検出器32の入射面32Aに対応する)が装着されている。これにより、例えば300fpsのフレームレート(1フレームは、例えば、64×1500画素)で入射X線を、当該X線の量に応じたデジタル電気量の画像データとして収集することができる。以下、この収集データを「フレームデータ」と呼ぶ(原フレームデータとも呼ばれる)。
Specifically, an
このため、撮影時には、X線管31及び検出器32の対は、被験者Pの口腔部を挟んで互いに対峙するように位置し、その対毎、一体に口腔部の周りを回転するように駆動される。このとき、X線管31及び検出器32の対は、口腔部の歯列に沿った所望断面(正確には、後述する標準面(標準断層面))に所定の焦点を合わせて且つその標準面を追従するように回転駆動される。この標準面をZ軸方向から見たときの形状は、略馬蹄形を成す。この標準面に追従する際、X線管31及び検出器32は必ずしも同一の角速度で回転するわけではなく、上位概念としては「円弧に沿った移動」とも呼ぶことができる回転になっている。なお、標準面は検出器32の検出面32A(図2参照)に平行な面となる。本実施形態では、検出面32AはZ軸方向と一致するように位置決めされている。
For this reason, at the time of imaging, the pair of the
図2に、このパノラマ画像撮影装置の制御及び処理のための電気的なブロック図を示す。同図に示す如く、X線管31は高電圧発生器41及び通信ライン42を介して制御・演算装置12に接続され、検出器32は通信ライン43を介して制御・演算装置12に接続されている。高電圧発生器41は、支柱部22、上下動ユニット23、又は回転ユニット24に備えられ、制御・演算装置12からの制御信号により、X線管31に対する管電流及び管電圧などのX線曝射条件、並びに、曝射タイミングのシーケンスに応じて制御される。
FIG. 2 shows an electrical block diagram for control and processing of this panoramic image photographing apparatus. As shown in the figure, the
制御・演算装置12は、例えば大量の画像データを扱うため、大容量の画像データを格納可能な、例えばパーソナルコンピュータで構成される。つまり、制御・演算装置12は、その主要な構成要素して、内部バス50を介して相互に通信可能に接続されたインターフェース51,52,62、バッファメモリ53、画像メモリ54、フレームメモリ55、画像プロセッサ56、コントローラ(CPU)57、及びD/A変換器59を備える。コントローラ57には操作器58が通信可能に接続され、また、D/A変換器59はモニタ60にも接続されている。
The control /
このうち、インターフェース51,52はそれぞれ高電圧発生器41、検出器32に接続されており、コントローラ57と高電圧発生器41、検出器32との間で交わされる制御情報や収集データの通信を媒介する。また、別のインターフェース62は、内部バス50と通信ラインとを結ぶもので、コントローラ57が外部の装置と通信可能になっている。これにより、コントローラ57は、外部に在る口内X線撮影装置により撮影された口内画像をも取り込めるとともに、本撮影装置で撮影したパノラマ画像やその画像に基づく焦点最適化画像(後述する)を例えばDICOM(Digital Imaging and Communications in Medicine)規格により外部のサーバに送出できるようになっている。
Of these, the
バッファメモリ53は、インターフェース52を介して受信した、検出器32からのデジタル量のフレームデータを一時的に記憶する。
The
また、画像プロセッサ56は、コントローラ57の制御下に置かれ、患者の歯列に沿った標準面のパノラマ画像の生成及びそのパノラマ画像の後利用のための処理を操作者との間でインターラクティブに実行する機能を有する。この機能を実現するためのプログラムは、ROM61に予め格納されている。この標準面は、本実施形態では、予め用意した複数の断層面から選択された断層面である。つまり、この標準面の位置は、歯列の奥行き方向の一定範囲で変更可能になっている。このパノラマ画像の生成及び読影のための後処理は、このパノラマ画像撮影装置の特徴の中核を成すものの1つであるので、後で項を分けて詳述する。
The
画像プロセッサ56により処理される又は処理途中のフレームデータ及び画像データは画像メモリ54に読出し書込み可能に格納される。画像メモリ54には、例えばハードディスクなどの大容量の記録媒体(不揮発性且つ読出し書込み可能)が使用される。また、フレームメモリ55は、生成されたパノラマ画像データ、及び/又は、後処理されたパノラマ画像データを表示するために使用される。フレームメモリ55に記憶される画像データは、所定周期でD/A変換器59に呼び出されてアナログ信号に変換され、モニタ60の画面に表示される。
Frame data and image data processed by the
コントローラ57は、ROM61に予め格納されている制御及び処理の全体を担うプログラムに沿って、装置の構成要素の全体の動作を制御する。かかるプログラムは、操作者から所定事項についてインターラクティブに操作情報を受け付けるように設定されている。このため、コントローラ57は、後述するように、標準面のパノラマ画像の生成、及び、そのパノラマ画像の焦点最適化(すなわち画像のボケをより減らす処理)を担う再構成に必要なパラメータ(後述するゲイン)の設定、フレームデータの収集(スキャン)、操作器58から出力される、操作者の操作情報を加味してインターラクティブに制御可能になっている。
The
このため、患者は、図1に示すように、立位又は座位の姿勢でチンレスト25の位置に顎を置いてマウスピース26を咥えるともに、ヘッドレスト28に額を押し当てる。これにより、患者の頭部(顎部)の位置が回転ユニット24の回転空間のほぼ中央部で固定される。この状態で、コントローラ57の制御の元、回転ユニット24が患者頭部の周りをXY面に沿って、及び/又は、XY面にオブリークな面に沿って回転する(図1中の矢印参照)。
For this reason, as shown in FIG. 1, the patient places the jaw at the position of the
この回転の最中に、コントローラ57からの制御の元で、高電圧発生器41が所定周期のパルスモードで曝射用の高電圧(指定された管電圧及び管電流)をX線管31に供給し、X線管31をパルスモードで駆動する。これにより、X線管31から所定周期でパルス状X線が曝射される。このX線は、撮影位置に位置する患者の顎部(歯列部分)を透過してラインセンサ形の検出器32に入射する。検出器32は、前述したように、非常に高速のフレームレート(例えば300fps)で入射X線を検出し、対応する電気量の2次元のデジタルデータ(例えば64×1500画素)として順次出力する。このデジタルデータは前述したフレームデータとして扱われ、通信ライン43を介して、制御・演算装置12のインターフェース52を介してバッファメモリ53に一時的に保管される。この一時保管されたフレームデータは、その後、画像メモリ53に転送されて保管される。
During this rotation, under the control of the
このため、画像プロセッサ56は、画像メモリ53に保管されたフレームデータを用いた再構成により歯列に沿った標準面に沿ったパノラマ画像を生成するとともに、そのパノラマ画像上で指定される関心領域(ROI)を成すフレームデータを用いた再構成により焦点最適化画像を生成する。ここで付言したきは、パノラマ画像そのものも焦点を最適化しようとの意図を以って生成する標準面の全体の断面像である。しかしながら、実際には、被検体それぞれの歯列の形状に違いがあるため、標準面だけでは個々の領域について焦点ボケが最も少ない(焦点が一番合った、すなわち焦点が最適化された)画像を得ることは難しい。このため、本実施例形態では、標準面のパノラマ画像(少なくとも歯列全体をカバーする断面像)をベースにして、内部構造をより明瞭に(ボケの少ない、焦点の合った)示す断面像を得るための再構成を行なう。この後付けの再構成は通常、ベースとなるパノラマ画像の一部の領域を対象にすることが多く、この一部領域の断面像をここでは焦点最適化画像と呼ぶ。
For this reason, the
このようにパノラマ画像の生成及び焦点最適化画像の生成は共に再構成と呼ばれる処理を伴う。この再構成は後で詳述するが、簡単には、フレームデータ(画素値)を互いに重ね合わせて加算する処理である。なお、パノラマ画像上に設定される関心領域は、通常、パノラマ画像の一部を成す局地領域として当該パノラマ画像上に指定されるが、パノラマ画像全体を関心領域として設定することも可能である。勿論、焦点最適化画像は医師などが欲した場合に生成される。 Thus, both the generation of the panoramic image and the generation of the focus optimized image involve a process called reconstruction. As will be described in detail later, this reconstruction is simply a process of superimposing and adding frame data (pixel values) to each other. Note that the region of interest set on the panorama image is normally specified on the panorama image as a local region that forms a part of the panorama image, but the entire panorama image can also be set as the region of interest. . Of course, the focus optimization image is generated when a doctor or the like desires.
パノラマ画像及び/又は焦点最適化像は、そのデータが画像メモリ54に保管されるともに、適宜な態様で、モニタ60に表示される。このうち、少なくとも、標準面の選択、関心領域の設定、断面位置の変更、表示態様などについて、操作器58から与える操作者の意思が反映される。
The panorama image and / or the focus optimized image is stored in the
このパノラマ画像撮影装置1を用いたパノラマ画像の撮影及び読影は、大略、上述のようであるが、標準面のパノラマ画像及び指定領域の焦点最適化画像の生成には、「ゲイン」と呼ばれる考え方が導入されている。この「ゲイン」は、本実施形態にあっては、事前にキャリブレーションにより設定されており、そのゲインデータがルックアップテーブルLUTとして予め画像メモリ54の所定領域に格納されている。
The panoramic image capturing and interpretation using the panoramic
そこで、上述した「ゲイン」の考え方及び「ファントムを用いたゲインの設定」を含めて、このパノラマ画像撮影装置1で実行される歯列全体のパノラマ画像の生成及び指定領域の焦点最適化画像の生成に必要な事項をその項目毎に詳述する。
Therefore, including the above-described concept of “gain” and “setting of gain using phantom”, panorama image generation of the entire dentition and focus optimization image of the designated region executed by the panorama
(ゲインの考え方)
このパノラマ画像撮影装置1では、指定(又は、後述するように選択)された歯列に沿った標準面(所望断層面)のパノラマ画像は、高速(例えば300fps)に収集されたフレームデータ(細長い2次元のスリット状で、実際には、ライン状と見做すX線透過データのセット)を、位置をずらしながら相互に重ね合わせて加算することで生成される。この重ね合わせが「再構成」の中核を成す処理である。つまり、重ね合わせにより画素値の濃淡の程度差が強まって、構造物(歯、歯茎など)がその他の部位よりも高い濃度で描出されることを利用している。ここでは、複数セットのフレームデータを相互に重ね合わせて加算するときに、それぞれのセットのフレームデータをどの程度位置をずらせて重ねるかという重ね合わせの程度を示す量、すなわち、「フレームデータ間の重ね合わせの量」をゲインと呼んでいる。
(Gain concept)
In this panoramic
このゲインが小さいときには重ね合わせの程度が密であり、ゲインが大きいときには重ね合わせの程度が粗になる。このフレームデータの重ね合わせの様子を図12中の(A)(B)に模式的に示す。同図(A)はゲインが小さいとき、同図(B)はゲインが大きいときの重ね合わせを夫々示す。このように、ゲインの大小に伴う重ね合わせの程度(粗密)概念は、通常の電気回路のそれとは反対になる。これは、後述するように、フレームデータを横軸とし且つメモリ空間上でフレームデータ同士を相互に加算する位置(写像位置、すなわち、再構成されたパノラマ画像の画素位置)を横軸とした座標上のカーブ(スピードカーブと呼ばれる)の「傾きに相当する」ことに因る。このスピードカーブについては、後述する。 When this gain is small, the degree of superposition is dense, and when the gain is large, the degree of superposition is coarse. The manner of superimposing the frame data is schematically shown in FIGS. FIG. 6A shows superposition when the gain is small, and FIG. 4B shows superposition when the gain is large. As described above, the concept of the degree of superposition (dense / dense) accompanying the magnitude of the gain is opposite to that of a normal electric circuit. As will be described later, this is a coordinate with the horizontal axis as the position where the frame data is the horizontal axis and the frame data are mutually added in the memory space (mapped position, that is, the pixel position of the reconstructed panoramic image). This is due to the “equivalent to the slope” of the upper curve (called the speed curve). This speed curve will be described later.
さらに、上述のように、ゲイン、つまりフレームデータの重ね合わせ量を加減すると、画像濃淡が生成する画像間で変わる。つまり、再構成す断面を変えていくと、そのままでは濃淡が画像間で変わり、読影し難くなる。このため、使用するゲインに比例又は正比例した係数を再構成画像の画素値に掛けて、画像間で見かけ上の濃淡を同じすることが必要である。 Furthermore, as described above, when the gain, that is, the amount of overlap of frame data is adjusted, the image density changes between images to be generated. In other words, if the cross-section to be reconstructed is changed, the shade changes between images as it is, making it difficult to interpret. For this reason, it is necessary to multiply the pixel value of the reconstructed image by a coefficient proportional to or directly proportional to the gain to be used, so that the apparent shading is the same between the images.
このゲインの一例を、簡単化した図3のモデルを用いて説明する。同図に示すように、X線管31と検出器32が、互いのオブジェクトOB(患者の顎部の歯列)に対する距離D1とD2(それぞれ、歯列の各点においてスキャン中のX線管と検出器とを結ぶ直線に沿った方向(以下、奥行き方向と呼ぶ)の距離)の相対的な比を一定に保持し且つ相対的な動作速度をある値に保持して動くと、オブジェクトOBがぼけない(つまり焦点が合っている)フレームデータの重ね合わせの量(ゲイン)が決まる。
An example of this gain will be described using the simplified model of FIG. As shown in the figure, the
換言すれば、上述のようにスキャンすると、相対的な動作速度とゲインとで焦点面(焦点が合った連続する断面)が確定する。この焦点面は、距離D1,D2の比に対応するので、焦点面は各奥行き方向において検出器32から平行移動した面に位置する。
In other words, when scanning is performed as described above, a focal plane (a continuous cross-section in focus) is determined based on the relative operation speed and gain. Since this focal plane corresponds to the ratio of the distances D1 and D2, the focal plane is located on a plane translated from the
一般的には、ゲインが小さくなるほど、焦点位置は各奥行き方向DdpにおいてX線管31により近くなり、ゲインが大きくなるほど、焦点位置は各奥行き方向DdpにおいてX線管31から遠ざかる。このため、奥行き方向それぞれにおけるX線管31と検出器32との距離間隔が定量的に分かるファントム(後述する)を用いて、ゲインをいくらにすれば焦点が合うのかという定量的な計測(設定)を、奥行き方向それぞれに沿った直線上の各位置について事前に行なっておく。つまり、各位置(標準面からの各距離)とゲインとの関係を事前に計測して、その関係情報を例えば前述したようにルックアップテーブルLUTとして持っておけばよい。
In general, as the gain decreases, the focal position becomes closer to the
この事前計測のためのスキャンは、チンレスト25の位置にファントムを置いてX線管31と検出器32の対を回転させて行うが、この回転の軌跡及び速度は、被験者Pに対する実際の撮影(スキャン)のそれと同一に設定される。
This pre-measurement scan is performed by placing a phantom at the position of the
また、ゲインの特性から、縦方向、すなわち検出器32の検出面32A(X線が入射する面:図2参照)に平行な方向(Z軸方向)のゲインは、XY面の位置毎に一定である。すなわち、検出器32がある位置に在るときの、その検出器32を通る奥行き方向の(XY面の)各位置のゲインは、位置毎には異なるが、その位置を通る検出面32と平行な方向(Z軸方向)において全て同一値を採る。
Further, from the characteristics of the gain, the gain in the vertical direction, that is, the direction (Z-axis direction) parallel to the
勿論、上述したテーブル参照に拠る手法の他に、ンとの関係を演算式で保有し、奥行き方向それぞれの位置が与えられる毎に、演算によってゲインを求めてもよい。また、ゲインは、奥行き方向それぞれの各位置について求めるとしたが、この求めたゲインを用いて、最終的には、かかる位置の全体を含むスキャン空間(歯列を含む空間)のゲインを極座標や直交座標で表現した値に変換し、この変換ゲインを用いるようにしてもよい。 Of course, in addition to the method based on the above-described table reference, the relationship between the values may be held by an arithmetic expression, and the gain may be obtained by calculation each time a position in the depth direction is given. In addition, the gain is obtained for each position in the depth direction, but finally, using this obtained gain, the gain of the scan space (the space including the dentition) including the whole of the position is converted into polar coordinates and It may be converted into a value expressed in rectangular coordinates, and this conversion gain may be used.
このため、かかるルックアップテーブルLUTを参照することで、最初に再構成する標準面とは異なる断層面に焦点を合わせるときの、当該断層面に沿った各写像位置のゲインを得ることができる。このゲインを用いてフレームデータを相互に重ね合わせることで、かかる標準面の各写像位置のパノラマ画像の画素値を得ることができる。なお、かかる面は、XY面に垂直な面が基本であるが、XY面(且つYZ面及び/又はXZ面)に斜めのオブリーク面であってもよい。 Therefore, by referring to the lookup table LUT, it is possible to obtain the gain of each mapping position along the tomographic plane when focusing on a tomographic plane different from the standard plane to be reconstructed first. By superimposing the frame data on each other using this gain, the pixel value of the panoramic image at each mapping position on the standard plane can be obtained. Such a plane is basically a plane perpendicular to the XY plane, but may be an oblique plane oblique to the XY plane (and the YZ plane and / or the XZ plane).
(事前計測に用いるファントム)
上述した如く、奥行き方向の距離とゲインの関係を事前に定量計測しておくには、本実施形態ではファントムを用いている。
(Phantom used for pre-measurement)
As described above, in order to quantitatively measure the relationship between the distance in the depth direction and the gain in advance, a phantom is used in this embodiment.
一般的に歯の並び、すなわち歯列は馬蹄形であるので、その曲率に応じた複数のスキャン領域(前歯領域か、奥歯領域か)に分けて、前述した距離D1,D2を変えながら、かかる馬蹄形に沿った設定される標準面をなぞるようにスキャンを行なう。これにより、ファントムを用いて、歯列に沿った方向で所定間隔(例えば、図4において、奥行き方向のi番目とi+1番目との距離が10mm)毎に各奥行方向の距離とゲインとの関係を定量的に計測することが望ましい。 Generally, since the tooth arrangement, that is, the dentition is a horseshoe shape, it is divided into a plurality of scan regions (anterior tooth region or back tooth region) according to the curvature, and the horseshoe shape while changing the distances D1 and D2 described above. Scan to follow the set standard plane along Thus, using the phantom, the distance and gain in each depth direction at predetermined intervals in the direction along the dentition (for example, the distance between the i-th and i + 1-th in the depth direction in FIG. 4 is 10 mm). It is desirable to quantitatively measure this relationship.
この事前計測に用いるファントムの例を図5〜7に示す。図5,6に最初のファントムFT1を例示する。このファントムFT1は、好適には、鉛板などのX線吸収が少なく丈夫な板体であって略馬蹄形に形成されて成るベース71(図6参照)と、このベース71の一端部から所定角度θ(例えば45度)をもって斜め上方に延設されるアクリル板などから成る複数個の測定板72(図5参照)と、ベース部71の他端部から下方に伸びるチンレスト固定部73と、各測定板72の一方の面にその長手方向の所定距離(水平面(XY面)上の所定距離範囲R1(例えば20mm)に対応した距離)の範囲に渡って所定距離(水平面(XY面)上の微小距離R2(例えば5mm)に対応した距離)だけ隔てて配設された鉛ボールなどから成る複数のファントム体74と、を備える。
Examples of phantoms used for this preliminary measurement are shown in FIGS. 5 and 6 illustrate the first phantom FT1. The phantom FT1 is preferably a base 71 (see FIG. 6), which is a strong plate with little X-ray absorption, such as a lead plate, and has a substantially horseshoe shape, and a predetermined angle from one end of the
このうち、ベース71に対する測定板72の角度θは、X線投影方向に対して角度θだけ傾斜させるための角度である。また、複数個の測定板72は、仮想的に歯列(図6中の点線L1を参照)を横断するように当該歯列に沿って配設されるとともに、その相互間を奥歯付近で所定ピッチP1(例えば10mm)程度に設定されている。(図6参照)。ファントム体74は、微小距離R2よりは小さく、ボケを十分に目視観測できる程度の径(例えば直径1mm)を有する。このため、微小距離R2は、隣接する2つのファントム体74それぞれの中心位置間の処理である。また、所定処理範囲R1は、歯列の馬蹄形断面として観測したい範囲に設定される。
Among these, the angle θ of the
なお、ベース71に対する測定板72の取り付け位置は、ネジ止めの位置をずらすなどして、奥行き方向に対して調整機構ADにより調整可能なことが望ましい。
It should be noted that the mounting position of the
図7には、別のファントムFT2を例示する。このファントムFT2は、前述したファントムFT1の測定板72に配設したファントム体74の代わりに、硬鉛から成る短冊状で且つ薄膜状のファントム体74Aを配設したものである。このファントム体74Aのサイズは、一例として、幅5mm、長さ21.2mm(所定距離範囲R1)、厚さ0.5mm程度であり、バリが無く、精度の良いサイズで加工される。このファントム体74Aの長手方向の各位置は、そのファントム体74Aの一方の端面と測定板72の一方の端面との間の距離が既知であれば、線形性に因って決定できる。その他の構造は、図5,6に示すものと同様である。
FIG. 7 illustrates another phantom FT2. In this phantom FT2, instead of the
これら何れのファントムFT1,FT2を用いた場合でも、焦点のボケと距離とを計測することができる。つまり、第1のファントムFT1の場合、事前計測のためのスキャンで収集したパノラマ画像から各測定板72上の複数のファントム体74を成す鉛ボールの像のボケ具合を目視で観測する。他方の第2のファントムFT2の場合、同様のパノラマ画像から各測定板72上のファントム体74Aを成す短冊状の鉛板と測定板72そのものの端面のボケ具合を目視で観測する。この観測結果に基づいて、各測定板72の各ファントム体74について、又は、各測定板72のファントム体74Aの長手方向について、ボケが在る場合には、ゲインを試行錯誤的に調整して画像を観測し、ボケが最も少ないときのゲインを、その奥行き方向における、その位置における焦点最適化ゲインとして決定する。つまり、このゲインは、そのボケが最も少ない画像を提供しているフレームデータの重ね合わせ程度である。画像プロセッサ56は、各ファントム体の位置における重ね合わせ程度を認識しており、その程度を示す量をゲインとしてコントローラ57に渡す。
Even when any of these phantoms FT1, FT2 is used, it is possible to measure the focal blur and distance. That is, in the case of the first phantom FT1, the degree of blurring of the lead ball image forming the plurality of
なお、ファントムFTは、板状のX線を透過しない物体を周期的に歯列に沿い並べて構成してもよい。この構造の場合、奥行き方向の距離目安を透過しない材料で形成する。この場合には、透過しない板材と透過部との境の見え方がシャープにボケないゲインを探る方法を採る。 The phantom FT may be configured by periodically arranging objects that do not transmit plate-like X-rays along the dentition. In the case of this structure, it is made of a material that does not transmit the distance guide in the depth direction. In this case, a method of searching for a gain in which the appearance of the boundary between the non-transmitting plate material and the transmitting portion is sharply blurred is adopted.
(ルックアップテーブル)
上述の如く、歯列の各位置に交差する奥行き方向それぞれの位置(距離)における焦点最適化ゲインは、本実施形態にあっては、ルックアップテーブルLUTとして画像メモリ54の所定領域に保管される。このようにしてルックアップテーブルLUTを保有しておけば、歯列に沿った任意断面を、ルックアップテーブルLUTの持つ自由度を以って再構成することができる。
(Lookup table)
As described above, the focus optimization gain at each position (distance) in the depth direction intersecting each position of the dentition is stored in a predetermined area of the
ところで、上述した事前計測を行なった位置は、スキャン中のX線管と検出器とを結ぶ直線上、すなわち、スキャン中の奥行き方向それぞれにおいて標準面からの距離として定義されている。このため、3次元のボクセル空間に適合したルックアップテーブルLUTを作成するには、このボクセル空間の各サンプル点の前述したゲインをその周辺の既知のゲインから補間によって作成しておけばよい(キャリブレーション)。この結果、図8に示すように、馬蹄形の歯列に沿った所定距離の範囲R1に応じた馬蹄形の3次元ボクセルでゲインが設定される、XY面上の同一馬蹄形断面内で例えば等間隔にゲインが設定される。なお、前述したが、各サンプル位置(例えば(N−1,S−D)の位置)においてZ軸方向(縦方向)のゲインの値は同じであるので、その分の演算は省略することができる。このため、ルックアップテーブルLUTは、図8で示す位置(標準面からの距離としての位置)及びその位置に対応するゲインの対応関係を示す情報を有している。 By the way, the position where the above-mentioned pre-measurement is performed is defined as a distance from the standard plane on a straight line connecting the X-ray tube and the detector during scanning, that is, in each depth direction during scanning. For this reason, in order to create a look-up table LUT adapted to a three-dimensional voxel space, the above-described gain of each sample point in this voxel space may be created by interpolation from known gains in the vicinity (calibration). ) As a result, as shown in FIG. 8, the gain is set by the horseshoe-shaped three-dimensional voxel corresponding to the range R1 of the predetermined distance along the horseshoe-shaped dentition, for example, at equal intervals in the same horseshoe section on the XY plane. Gain is set. As described above, the gain value in the Z-axis direction (vertical direction) is the same at each sample position (for example, the position of (N−1, SD)), and therefore the calculation for that amount may be omitted. it can. Therefore, the look-up table LUT has information indicating the correspondence relationship between the position shown in FIG. 8 (position as a distance from the standard surface) and the gain corresponding to the position.
また、このルックアップテーブルLUTについては、如何に最適な数で且つ詳細なサンプル点の(サンプル点の間のピッチを細かく)のゲインを決めるかということが、画質と演算時間の両立という観点から重要である。基本的には、できるだけ詳細なサンプル点のゲインを有し、このゲインを使って、2段階の断面再構成を行なうとよい。1段階目では比較的、粗く設定したゲインで標準面のパノラマ画像を再構成し、迅速に歯列の全体を観測できるようにし、2段階目で、この全体のパノラマ画像から関心のある領域を例えばマニュアルで指定可能にし、予め設定してある、より詳細なゲインでその関心領域のパノラマ画像を再構成する。これにより、精度を上げた補間演算によるゲイン設定を行い、その上で、全体観測の後の高精度ゲインに拠る局所領域をより詳細に観測することができる。 For this lookup table LUT, how to determine the optimal number of gains of detailed sample points (finely the pitch between sample points) is determined from the viewpoint of achieving both image quality and calculation time. is important. Basically, it is preferable to have a sample point gain as detailed as possible, and to perform two-stage cross-sectional reconstruction using this gain. In the first stage, the panoramic image of the standard surface is reconstructed with a relatively coarse gain so that the entire dentition can be observed quickly. In the second stage, the region of interest is extracted from the entire panoramic image. For example, it is possible to specify manually, and a panoramic image of the region of interest is reconstructed with a preset detailed gain. Thereby, the gain can be set by the interpolation calculation with higher accuracy, and then the local region based on the high accuracy gain after the overall observation can be observed in more detail.
なお、この2段階の再構成の手法を採る場合でも、1段階目で、より適切な断面の位置でパノラマ画像(歯列全体像)を得ることは重要である。それは、病変部などの部位を最初から把握して見過ごしを防ぐためである。このため、患者個々の歯列の形状やサイズになるべく合わせた歯列断面(標準面)を指定することが重要である。 Even when this two-stage reconstruction method is employed, it is important to obtain a panoramic image (entire dentition image) at a more appropriate cross-sectional position in the first stage. This is to prevent the oversight by grasping a site such as a lesion from the beginning. For this reason, it is important to specify the dentition cross section (standard surface) that matches the shape and size of each patient's dentition as much as possible.
(スピードカーブ)
次に、上述したゲインを用いて馬蹄形の歯列に沿った断面の画像を再構成する手法を説明する。その基本を成す考えが図9に示すスピードカーブである。
(Speed curve)
Next, a method for reconstructing a cross-sectional image along a horseshoe-shaped dentition using the above-described gain will be described. The basic idea is the speed curve shown in FIG.
図9において、横軸はフレームデータのフレーム番号(例えば1〜4096)、縦軸はメモリ空間上でフレームデータを加算する位置を示す。曲線CAは、本実施形態に係る検出器32から出力される、標準面として指定した断面でのフレームデータのフレーム番号に対して、パノラマ画像再構成をした後の写像したメモリ空間上の位置をドットしたスピードカーブの標準パターンである。
In FIG. 9, the horizontal axis indicates the frame number (for example, 1 to 4096) of the frame data, and the vertical axis indicates the position where the frame data is added in the memory space. A curve CA indicates the position in the memory space mapped after the panoramic image reconstruction with respect to the frame number of the frame data in the cross section designated as the standard plane output from the
このグラフCAから分かるように、標準面では、歯列の側面(奥歯部分)と前面とではグラフの傾き(すなわちゲイン)が異なり、側面の方の傾きが約−1.5で、前面の方のそれが約−0.657に設計されている。
この標準パターンはあくまで事前にプリセットされたもので、実際に人間の歯列の所望の収集位置の場合、歯形の個体差や所望位置のバラツキなどにより、最適に焦点が合っていない画像となる可能性がある。例えばある個体で焦点が最適化された画像を得るためには、図9の曲線CBで示すように、スキャンする位置により微妙にスピードを変えながら収集すればよいが、そのようなスキャン制御は非常に複雑になる。そこで、本実施形態では、そのような複雑なスキャン制御に代えて、収集するフレームデータの重ね合わせ程度(つまり、ゲイン)を調整する。この基本となるのが上述したスピードカーブである。フレームデータの重ね合わせ量を、曲線CBの如く、指定した所望の曲線で表される断面に沿って実際の収集スピードを変えたのと等価なパノラマ画像再構成を後処理として行なうことができる。
As can be seen from this graph CA, in the standard surface, the inclination (that is, gain) of the graph is different between the side surface (back tooth portion) of the dentition and the front surface, and the inclination of the side surface is about −1.5, It is designed at about -0.657.
This standard pattern is preset in advance, and in the case of a desired collection position of a human dentition, an image that is not optimally focused can be obtained due to individual differences in tooth profile or variations in the desired position. There is sex. For example, in order to obtain an image in which the focus is optimized in an individual, as shown by a curve CB in FIG. 9, it is only necessary to collect while slightly changing the speed depending on the scanning position. It becomes complicated. Therefore, in this embodiment, instead of such complicated scan control, the degree of superimposition (that is, gain) of collected frame data is adjusted. The basis of this is the speed curve described above. A panoramic image reconstruction equivalent to changing the actual collection speed along the cross-section represented by the designated desired curve, such as the curve CB, can be performed as post-processing for the overlay amount of the frame data.
(焦点最適化の基本的な考え)
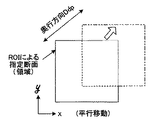
まず、図10に示すように、読影者が装置上で指定又は選択することで標準的に用意された、歯列に沿った標準面のパノラマ画像(ベース画像)が基本となる。この読影者は、このパノラマ画像を歯列の全体状況を把握するために用いる。読影者は、このパノラマ画像を観察しながら、その画像上に、焦点をもっと合わせたい(焦点最適化したい)関心のある局所的な領域をROI(関心領域:以下、この関心領域を「ROI」と呼ぶ)として設定する。図10には、2つのROI(ROI1、ROI2)を示している。
ROI1は、x軸及びy軸の両方について真に診たい部分のみをカバーする、より小さい領域を指定している。このROI1のサイズは、従来の口内撮影法で用いるX線フィルムとほぼ同一値に設定することもできる。また、口内撮影法で側歯を撮影する場合において歯列がX線フィルムに程よく入るように設定するが、本実施形態においてもこれを考慮し、側歯が程よくROI内の収まるように、ROI1で指定される断面をx軸及びy軸に平行なパノラマ画像の面から回転(傾斜)させることも好適である。この小さい領域の大きさを有する様々な方向や角度からの断面(平行移動させた断面、傾斜(回転)させた断面、それらの平行移動、傾斜(回転)を適宜に組み合わせた断面、更には、個々の歯の湾曲形状に合わせた湾曲断面)の画像を後述するように焦点最適化の処理に付すことになる。
これに対し、ROI2は、歯列の全域に渡って焦点を最適化させる場合に指定される、より大きな範囲指定を例示している。いずれにしても、このようにROIを指定することで、この処理すべき領域を限定することができるため、後述する焦点を最適化するための演算量を減らして、処理時間を短縮することができる。
また、このようにROI〈ROI1、RO2〉をベース画像上に指定するときには、そのROIのy軸(縦)方向の範囲を限定することが望ましい。理由は、最適化の必要のない縦方向の領域のデータを焦点最適化のための演算から除外して、演算量を減らすためであり、これにより演算速度を上げることができる。
(Basic idea of focus optimization)
First, as shown in FIG. 10, a panoramic image (base image) of a standard surface along a dentition, which is standardly prepared by designating or selecting on the apparatus by an image interpreter, is basic. This image interpreter uses this panoramic image to grasp the entire state of the dentition. While observing the panoramic image, the image interpreter selects an ROI (region of interest: hereinafter referred to as “ROI”) as a local region of interest on which the focus is more desired (focus optimization is desired). Set as). FIG. 10 shows two ROIs (ROI1, ROI2).
ROI1 specifies a smaller area that covers only the portion that is truly desired for both the x-axis and the y-axis. The size of this
On the other hand, ROI2 exemplifies a larger range specification that is specified when the focus is optimized over the entire dentition. In any case, since the region to be processed can be limited by specifying the ROI in this way, the amount of calculation for optimizing the focus, which will be described later, can be reduced and the processing time can be shortened. it can.
In addition, when specifying ROI <ROI1, RO2> on the base image in this way, it is desirable to limit the range of the ROI in the y-axis (vertical) direction. The reason is that data in the vertical direction that does not need to be optimized is excluded from the calculation for the focus optimization to reduce the calculation amount, thereby increasing the calculation speed.
このようにROIの指定の後、そのROIで決まる大きさを有する様々な断面がインターラクティブに指定される。装置は、そのように指定される断面の画像のみを焦点最適化の処理に付す。この処理は、操作者からの断面の取り方の指令に応答して自動的に行なわれる。これにより、ROIに対応する局所的断面画像を、その焦点を最適化された状態でモニタ60に表示させることができ、詳細観察に使用することができる。
As described above, after the ROI is designated, various cross sections having sizes determined by the ROI are designated interactively. The apparatus applies only the image of the cross-section so designated to the focus optimization process. This process is automatically performed in response to a command from the operator for taking a cross section. As a result, the local cross-sectional image corresponding to the ROI can be displayed on the
なお、この最適化されたROI画像、すなわち局所的断面画像をモニタ60に表示する際、従来のX線フィルムによる口内撮影法に拠る馴れに対する違和感を軽減する表示法が好適である。具体的には、かかる局所的断面画像の縦横のサイズを実距離に合わせて表示すると好都合である。
In addition, when displaying this optimized ROI image, that is, a local cross-sectional image, on the
(焦点最適化の概要)
この焦点最適化の処理は画像プロセッサ56により、図11に示す如く、実行される。
(Overview of focus optimization)
This focus optimization process is executed by the
焦点最適化の指令を受けると、画像プロセッサ56は標準面のスピードカーブCAを読み出し、このスピードカーブCAと指定されたROIとを参照して、そのROIの横方向(フレームデータの時系列方向)におけて中心となるフレームデータFDcを図12に模式的に示す如く特定する(ステップA1)。次いで、画像プロセッサ56は、そのフレームデータFDcを中心として、スピードカーブCAからROIの全領域に相当する複数のフレームデータFDb´〜FDe´を図12に模式的に示す如く特定する(ステップA2)。このとき、検出器32には使用有効幅があるため、その有効幅分のフレームデータFDb、FDeをフレームデータFDb´〜FDe´の群の左右にそれぞれ加算することが望ましい。
When receiving a focus optimization command, the
次いで、画像プロセッサ56は、標準面のスピードカーブCAに従って特定したフレームデータFDb〜FDeを重ね合わせて加算(再構成)する(ステップA3)。つまり、これらのフレームデータFDb〜FDeのそれぞれをスピードカーブCAに従ってROI内の写像位置(図12の縦軸)それぞれに写像させる(写像方向P1,P2参照)。この写像の際、各フレームデータの中心位置の画素値を零(0)とし、重ね合わせ時の画素値のオフセットを排除する。なお、写像位置は実際には2次元の位置であるが、分かり易くするため、1次元で説明する。
Next, the
かかる写像によって、写像位置(画素位置)のそれぞれには、複数のフレームデータからのデータが重畳させるので、それらのデータを加算する。これにより、写像位置それぞれの画素値が演算され、部分断面画像(この場合には、標準面のパノラマ画像の一部)が生成される。この結果、ROIを形成するそれぞれの画素にスピードカーブCAの傾き、すなわちゲインに応じた濃淡が形成され、歯列の構造がパノラマ画像上に出現する。 By such mapping, data from a plurality of frame data is superimposed on each mapping position (pixel position), and these data are added. Thereby, the pixel value at each mapping position is calculated, and a partial cross-sectional image (in this case, a part of the panoramic image of the standard plane) is generated. As a result, the gradient of the speed curve CA, that is, the shade corresponding to the gain is formed in each pixel forming the ROI, and the dentition structure appears on the panoramic image.
次いで、画像プロセッサ56は再構成する位置情報(この場合、指定されたROIにより画成される領域の奥行き方向の位置のみならず、その角度も含む)を変更するか否かインターラクティブに判断する(ステップA4)。位置変更がある場合、ルックアップテーブルLUTから、変更された位置情報に応じたゲインを読み出す(ステップA5)。この読み出したゲインをフレームデータの中心画素方向に積分して、修正されたスピードカーブCBを演算する(ステップA6)。
Next, the
このとき、ROIのサイズは固定値であるから、新しい位置の再構成に必要なフレームデータのフレーム数は異なる。そこで、前述したステップA1で特定した、中心となるフレームデータFDcが修正位置における領域においても中心位置になるように、その領域の再構成に必要なフレームデータを特定する(ステップA7)。なお、修正位置の新しい領域のサイズが、最初のROIのサイズと同じになるように、フレームデータの数を修正位置に応じて増減させてもよい。 At this time, since the size of the ROI is a fixed value, the number of frames of frame data necessary for reconstruction of a new position is different. Therefore, the frame data necessary for reconstruction of the area is specified so that the frame data FDc as the center specified in step A1 described above also becomes the center position in the area at the correction position (step A7). Note that the number of frame data may be increased or decreased according to the correction position so that the size of the new area at the correction position is the same as the size of the first ROI.
この準備が整うと、画像プロセッサ56は、前述と同様に、ステップA6で求めたスピードカーブCBとステップA7で特定した複数のフレームデータに基づいて、前述と同様に(ステップA3参照)、変更された部分領域の断面画像を再構成する(ステップA8)。このとき再構成のときに使われるスピードカーブCBは、図12の例えば仮想線で示す如く表される。
When this preparation is completed, the
さらに、再構成に使用したゲイン(断面位置に相当)に比例又は正比例した係数を、再構成により生成された断面画像の画素値それぞれに乗じる(ステップS9)。これにより、画像間の見かけ上の濃淡の差を殆ど解消することができ、断面画像が変わっても見易く、読影作業を容易にすることができる。 Further, a coefficient proportional to or directly proportional to the gain (corresponding to the cross-sectional position) used for reconstruction is multiplied by each pixel value of the cross-sectional image generated by the reconstruction (step S9). Thereby, it is possible to almost eliminate the difference in apparent shading between images, and even if the cross-sectional image changes, it is easy to see and the interpretation work can be facilitated.
このように生成された断面画像は、標準面に沿ったパノラマ画像の一部では無いが、そのパノラマ画像上で指定されたROIに基づいて変更された部分的な位置の断面画像である。この断面画像が読影医にとって所望のものであれば、その断面画像の画像データとその画像の位置情報(奥行き方向の位置、角度の情報)を記憶する(ステップA10,A11)。所望のものでない場合には、その処理はステップA4に戻される(ステップA10)。 The cross-sectional image generated in this way is not a part of the panoramic image along the standard plane, but is a cross-sectional image at a partial position changed based on the ROI specified on the panoramic image. If the cross-sectional image is desired by the interpreting doctor, the image data of the cross-sectional image and the position information (depth direction position and angle information) of the image are stored (steps A10 and A11). If not, the process returns to step A4 (step A10).
次に、図13〜図18を参照して、本実施形態に係るパノラマ画像撮影装置1により実行されるゲイン事前計測、パノラマ撮影、及び画像読影に係る処理の一例を説明する。
Next, an example of processing related to gain pre-measurement, panorama shooting, and image interpretation executed by the panoramic
(ゲイン事前計測)
最初に、図13を参照して、ゲイン事前計測(ゲインが既に設定されている場合には、ゲインのキャリブレーションとなる)を説明する。
(Gain pre-measurement)
First, referring to FIG. 13, gain pre-measurement (when the gain has already been set, gain calibration will be described).
前述したように、ゲインとは、フレームデータを相互に重ね合わせて加算するときの「重ね合わせの程度」を意味する量であって、ボケがない最適な焦点位置となるためのゲインは、歯列に交差する奥行き方向それぞれにおける各位置(距離)に応じて変わる。ゲインが小さくなるほど、焦点位置は各奥行き方向においてX線管31により近くなり、ゲインが大きくなるほど、焦点位置は各奥行き方向においてX線管31から遠ざかる。
As described above, the gain is an amount that means “the degree of superposition” when frame data are overlapped and added to each other, and the gain for achieving an optimal focal position without blur is the tooth It changes according to each position (distance) in each depth direction intersecting the column. As the gain decreases, the focal position becomes closer to the
このゲインを事前に設定して保有しておくために、制御・演算装置12のコントローラ57は図13に大略示す処理を、操作者との間でインターラクティブに行う。
In order to set and hold the gain in advance, the
このゲイン事前計測に際し、被験者の代わりに、ファントムFTがチンレスト25(図1参照)の位置に固定される。この固定されるファントムFTの位置は、後述するように、被験者Pの歯列を実際に撮影するときの、歯列の標準的な位置として定めた空間位置に対応している。このファントムFTには、前述したように図5又は図7に示すものが使用される。なお、ファントムFTのZ軸方向の位置に合わせて、ファントムFTがX線管31の照射X線の、コリメータで絞られた断面がスリット状のビーム内に位置するように、上下動ユニット23の高さが調整される。
In the prior gain measurement, the phantom FT is fixed at the position of the chin rest 25 (see FIG. 1) instead of the subject. The position of the fixed phantom FT corresponds to a spatial position determined as a standard position of the dentition when the dentition of the subject P is actually photographed, as will be described later. As the phantom FT, the one shown in FIG. 5 or 7 is used as described above. In accordance with the position of the phantom FT in the Z-axis direction, the
このファントムFTの固定配置が終ると、制御・演算装置12は操作者からのX線照射条件(管電圧、管電流、スキャン時間など)を受け付ける(ステップS1)。
When the fixed arrangement of the phantom FT is completed, the control /
この条件設定が終わると、操作者からの指令に応答して回転ユニット24(つまり、X線管31及び検出器32の対)をXY面に沿ってファントムFTの周りに移動(スキャン)させながら、X線管31にX線を照射させる一方で、検出器32に高速フレームの透過X線の検出をさせて、フレームデータの収集が行われる(ステップS2)。つまり、検出器32から、一例として、300fpsといった高速フレームレートでフレームデータが出力され、このフレームデータがバッファメモリ53を介して画像メモリ54に転送されて保存される。
When the condition setting is completed, the rotary unit 24 (that is, the pair of the
次いで、コントローラ57は、画像プロセッサ56に、収集したフレームデータを用いて、予め定めてある空間位置における歯列断面(所定面)のパノラマ画像を再構成するように指令する(ステップS3)。この所定面は、図14に示すように、被験者の標準的な歯列(つまり、それぞれの歯が標準的サイズの馬蹄形の軌跡上に並んでいる歯列)の中心線STに沿っている。この所定面は、後述する実際の撮影において選択可能なように用意されている複数の標準面のうちの基準となる面に一致させている。
Next, the
この所定面上の各位置Pn(すなわち、各奥行き方向Ddpと標準面とが交差する位置)に対するゲインGは、前述した図9の曲線CAで示す標準面のスピードカーブの傾きとして、予め決められている。そこで、画像プロセッサ56は、画像メモリ54から、前述したように、収集した全部のフレームデータを呼び出し、それらのフレームデータをスピードカーブCAに応じて決まる写像位置に足し込む(すなわち、重ね合わせて加算する)ことで、標準面のパノラマ画像が再構成される。
The gain G for each position Pn on the predetermined plane (that is, the position where each depth direction Ddp intersects the standard plane) is determined in advance as the slope of the speed curve of the standard plane indicated by the curve CA in FIG. ing. Therefore, the
次いで、コントローラ57は、この再構成した標準面のパノラマ画像をモニタ60に表示する(ステップS4)。この表示例を図15に示す。同図に示すように、ファントムFTに45度の所定傾斜角で設置してある5つの左端部測定板72L、左中間部測定板72LC、中心部測定板72C、右中間部測定板72RC、右端部測定板72Rが写り込んだ標準面のパノラマ画像が表示される。各測定板上には、複数個のファントム体74が移り込んでいるが、図には模式的にしか画けないが、標準面に相当する板長手方向(奥行き方向)の中心領域の空間位置に在る1つ又は複数のファントム体74のボケが最も少ない状態、すなわち、最も焦点が合っている状態になっている。
Next, the
ここでは、板長手方向を、ゲイン事前計測の都合上、奥行き方向を最外周領域Rotm、外周領域Rot、中心領域Rc、内周領域Rin、最内周領域Rinmの5種類に大まかに分けており(図15参照)、標準面は中心領域に属するように設定されている。つまり、前述した図5に示すファントムFT1の例で言えば、ベース71(XY面)に投影した所定距離範囲R1(例えば20mm)の領域を5領域に分けている。この所定距離範囲R1は、歯列の断面を自在に動かして診たい奥行き方向それぞれの範囲である。 Here, the longitudinal direction of the plate is roughly divided into five types: the outermost peripheral region Rotm, the outer peripheral region Rot, the central region Rc, the inner peripheral region Rin, and the innermost peripheral region Rinm, for the convenience of gain pre-measurement. (See FIG. 15), the standard plane is set to belong to the central region. That is, in the example of the phantom FT1 shown in FIG. 5 described above, the region of the predetermined distance range R1 (for example, 20 mm) projected onto the base 71 (XY plane) is divided into five regions. The predetermined distance range R1 is a range in the depth direction in which the section of the dentition is freely moved to be examined.
ここで、奥行き方向において標準面の前後に2つの領域、すなわち、2つの断面を設定でき、標準面と合わせて5種類の断面を計測することができる。これを図14に模式的に示す。最外周の仮想線が最外周断面OTMを、その次の内側の仮想線が外周断面OTを、その次に内側の仮想線が標準面STを、その次に内側の仮想線が内周断面INを、そして最も内側の仮想線が最内周断面INMをそれぞれ示す。それぞれの断面間の奥行き方向の間隔は、例えば4mmに設定されている。 Here, two regions, that is, two cross sections, can be set before and after the standard plane in the depth direction, and five types of cross sections can be measured together with the standard plane. This is schematically shown in FIG. The outermost virtual line is the outermost peripheral section OTM, the next inner virtual line is the outer peripheral section OT, the inner virtual line is the standard plane ST, and the inner virtual line is the inner peripheral section IN. , And the innermost imaginary line indicates the innermost circumferential section INM. The distance in the depth direction between the cross sections is set to 4 mm, for example.
このため、奥行き方向それぞれを5領域に大まかに分けた理由は、歯列の奥行き方向においては20mm程度の断面範囲を確保できれば十分で使用に耐えられ、また、後述するように、最終的にはゲインを補間する。したがって、演算量や演算時間との妥協を図ると、この段階でのゲインの基点データとしては、各奥行き方向に5点(5つの領域でのゲイン)を収集すれば十分である。 For this reason, the reason why the depth direction is roughly divided into 5 regions is sufficient if the cross-sectional area of about 20 mm can be secured in the depth direction of the dentition, and it is sufficient to withstand the use. Interpolate the gain. Therefore, when a compromise is made between the calculation amount and the calculation time, it is sufficient to collect five points (gains in five regions) in each depth direction as the gain base data at this stage.
次いで、操作者は、このパノラマ画像を目視・観察しながら、標準面以外の奥行き方向の前後の断面(位置)のゲインのインターラクティブな設定作業に移行する。具体的には、まず操作者はファントムFTのうちの最初の測定板72を選択して、その測定板72の画像を拡大して表示させる(ステップS5;図16参照)。この拡大表示は、その測定板72上の複数のファントム体74をより見易くして、ゲインを極力精度良く設定させるためである。この拡大表示を、中心部測定板72Cを例に説明する。なお、この拡大表示の測定板毎の順番は任意である。
Next, the operator shifts to an interactive setting operation of gains of cross sections (positions) before and after the depth direction other than the standard plane while visually observing and observing the panoramic image. Specifically, first, the operator selects the
次いで、コントローラ57は、拡大表示されている中心部測定板72Cを目視している操作者からの操作情報を受け付けて、その中心部測定板72C上の板長手方向の中心領域以外の領域を指定する(ステップS6)。この領域指定に応答して、コントローラ57は、指定された領域の奥行き方向の位置を演算し、その位置座標情報を記憶する(ステップS7)。このステップS6,S7の処理を介して、最初に、例えば中心部測定板72Cの最外周領域Rotmが、すなわち、中心部測定板72Cが置かれている方向に沿った奥行き方向における最外周断面OTMの位置が指定される。
Next, the
次いで、コントローラ57は、操作者からの操作情報を受け付けて、いま観測対象となっている最外周領域Rotmに属する1つ又は複数のファントム体74にボケ無し(殆どボケ無し又はボケが最も少ない状態を含む)、すなわち、目視している限りにおいて焦点が最高に合っている状態か(最適焦点の状態か)否かについて判定する(ステップS8)。いま、ファントム体74は丸い鉛ボールであるので、丸く且つその輪郭がくっきり現われている場合に、操作者は最適焦点の状態であると判断できる。その場合には、モニタ画面上の最適焦点の状態を示すボタン(図示せず)を押せばよい。未だ最適焦点の状態になっていないと判断できる場合、操作者は、モニタ画面上の未最適焦点の状態を示すボタンを押し、これに応答してモニタ画面上に現れるゲイン変更(ゲイン上げる、ゲイン下げる)のボタン操作を行なう〈ステップS9〉。
Next, the
このゲイン変更が行なわれると、かかる変更されたゲインGを用いて変更された断面、すなわち変更された奥行き方向の位置に対応したパノラマ画像の再構成を行なう(ステップS10)。このとき、いま行なっている拡大表示(領域指定されている)に係る中心部測定板72Cの部分のみを再構成することで、演算時間を短縮できる。この新しく再構成されたパノラマ画像は再度、表示(拡大表示像)される(ステップS11)。
When this gain change is performed, a panorama image corresponding to the changed cross-section, that is, the changed position in the depth direction is reconstructed using the changed gain G (step S10). At this time, the calculation time can be shortened by reconstructing only the portion of the
この後、コントローラ57の処理はステップS8に移され、前述したと同様に、中心部測定板72Cの最外周領域Rotmに属するファントム体74のボケの有無が判断される。この判断がNOとなるときには、未だ最適焦点化の余地があるので、コントローラ57は操作者からの指令に応じてゲインを変更し、パノラマ画像の再構成及びその表示を行なう(ステップS9〜S11)。このように試行錯誤的にゲインが変更されてボケ無しのパノラマ画像が得られると(ステップS8でYESの判断)、操作者は、そのときのゲインが中心部測定板72Cの奥行き方向に沿った最外周断面OTMの位置における最適な焦点を得るためのゲインであると認識できる。このため、コントローラ57は、このときのゲインを焦点最適化ゲインであるとして、操作者の操作に応答して画像メモリ54に保存する(ステップS12)。
Thereafter, the process of the
次いで、コントローラ57は、その処理をステップS13に移行させて、現在の測定板72上の長手方向の全ての領域に対して、かかるゲイン計測が終了したか否かを判断する。この判断でNO(ステップS13、NO)となる場合、コントローラ57は、ステップS6に戻って別の領域について上述と同様に実行する。これにより、例えば、中心部測定板72Cの奥行き方向に沿った外周領域Rotに対応した外周断面OTの位置における焦点最適化ゲインを計測することができる。
Next, the
ステップS13でYESの判断が得られる場合、コントローラ57は更に全ての測定板について前述と同様の焦点最適化ゲインの計測が済んだか否かを判断する(ステップS14)。この判断でNOとなる場合、未だ計測すべき測定板が残っているので、コントローラ57は、ステップS5に処理を戻して別の測定板、例えば右中間部測定板72RCについて前述と同様に処理を施す。これにより、その測定板の長手方向の中心領域Rc以外の領域に対応した断面の位置のゲインが計測される。一方、このステップS14でYESの判断が下されるときには、5枚全ての計測板72を用いて、最外周、外周、内周、最内周それぞれの断面位置の合計20点のゲインと基準面の5点のゲインとによる合計25点の位置(図17の黒丸の位置)のゲインを基準データとして得たことになる。
If YES is obtained in step S13, the
次いで、コントローラ57は、XY面上で標準面STを中心とし、この面STに沿って所定距離範囲R1を幅とする2次元領域(図17の斜線部参照)にマッピングされる合計25点の基準となるゲインに適宜な補間法を適用して、空間的に基準データを有する位置の間を埋める位置(図17の×印の位置)ゲインデータを演算する(ステップS15)。この補間が終ると、この馬蹄形を成す2次元領域の各点(黒丸及び×印の位置)のゲインの値がルックアップテーブルLUTとして画像メモリ54に保管される(ステップS16)。このルックアップテーブルLUTは、標準面STに交差する位置、その各交差位置を通る奥行き方向に沿って点在する各位置、及び、その各点在位置におけるゲイン値から成る。
Next, the
なお、この2次元領域に直交する上下方向(Z軸方向)のゲイン値は、前述した如く、各点において同一値を有する。このため、かかる2次元のルックアップテーブルLUTは、3次元のゲインに対するルックアップテーブルを示している。 The gain value in the vertical direction (Z-axis direction) orthogonal to the two-dimensional region has the same value at each point as described above. Therefore, the two-dimensional lookup table LUT indicates a lookup table for a three-dimensional gain.
このように図13に示す一連の処理を通じて、標準面STを中心とする奥行き方向の所定距離R1によって決まる馬蹄形状の2次元領域を有する3次元領域の各位置のゲインが事前に計測されたことになる。このゲイン事前計測は、工場出荷時又は装置の据付時に行なえば十分であるが、定期的な又は不定期の保守管理時のみならず、毎回の装置起動時にキャリブレーションとして実行するようにしてもよい。キャリブレーションの場合、それまで保有していたルックアップテーブルLUTの内容がその都度、新規のゲインデータに更新されることなる。 As described above, through the series of processes shown in FIG. 13, the gains at the respective positions of the three-dimensional area having the horseshoe-shaped two-dimensional area determined by the predetermined distance R1 in the depth direction centered on the standard surface ST are measured. become. It is sufficient that this gain pre-measurement is performed at the time of factory shipment or at the time of installation of the apparatus, but it may be performed as a calibration at the time of starting the apparatus not only at regular or irregular maintenance management. . In the case of calibration, the contents of the lookup table LUT held so far are updated to new gain data each time.
この事前計測やキャリブレーションに使用するファントムは、その測定板が多いほど、より詳細な基準となるゲインデータを計測できるが、操作者の操作上の負担も増えるので、その負担と計測すべきゲインの精度などとを比較して測定板の数や配置位置を決めればよい。 The more phantoms used for this pre-measurement and calibration, the more detailed the gain data that can be measured, the more it can measure the gain data. The number of measurement plates and the arrangement position may be determined by comparing the accuracy of the measurement.
(撮影)
次に、図18を参照して、撮影、すなわち実際のデータ収集について説明する。
(photograph)
Next, imaging, that is, actual data collection will be described with reference to FIG.
この撮影に際し、操作者は患者ID、患者氏名、撮影日時などの患者情報を制御・演算装置12に入力する(ステップS21)。この入力に応答して、コントローラ57は、その患者情報を画像メモリの所定領域に記録し、例えば患者IDをキー情報として、後からの収集するフレームデータとの関連付けを行なう。
At the time of photographing, the operator inputs patient information such as patient ID, patient name, photographing date and time to the control / calculation device 12 (step S21). In response to this input, the
次いで、被験者P(患者)を図1に説明するように位置決めする。つまり、操作者は、上下動ユニット13の高さを調節した後、被験者Pにマウスピース26を咥えさせた状態で、チンレスト25及びヘッドレスト28の部分を使って被験者の口腔部を所定の撮影位置に位置決めさせる。なお、この位置決めは患者情報の入力前に行なってもよいし、後述するX線照射条件の設定後に行なってもよい。
Next, the subject P (patient) is positioned as described in FIG. That is, the operator adjusts the height of the
コントローラ57は、操作者からの操作情報に基づいて実際の撮影に用いる標準面をインターラクティブに設定する(ステップS22)。この標準面の設定は、予め幾つかの標準面が装置に用意されているので、これを選択することで行なう。これについては後述する。
The
さらに、コントローラ57は、操作者からの操作情報に基づいて、前述したゲイン事前計測時と同様に、X線照射条件(X線の管電圧、管電流、スキャン時間、スキャン軌道など)を設定する(ステップS23)。
Furthermore, the
このように準備が済むと、コントローラ57は、操作者からの指令に応答して回転ユニット24(つまり、X線管31及び検出器32の対)をXY面に沿って被験者Pの口腔部の周りに移動(スキャン)させながら、X線管31にX線を照射させる一方で、検出器32に高速フレームの透過X線の検出をさせる。これにより、フレームデータの収集が行われる(ステップS24)。つまり、検出器32から、一例として、300fpsといった高速フレームレートでフレームデータが出力され、このフレームデータがバッファメモリ53を介して画像メモリ54に転送されて保存される。
When the preparation is completed in this way, the
なお、上述したフレームデータの収集の前又は後に、必要に応じて、外部の口内X線撮影装置で撮影された画像データを受信して、画像メモリ54に保存するようにしてもよい。
Note that image data captured by an external intraoral X-ray imaging apparatus may be received and stored in the
このスキャンが済むと、被験者Pは装置から解放される。 After this scan is completed, the subject P is released from the apparatus.
(読影(観察))
上述のスキャンによってフレームデータの収集が完了すると、医師は、後処理として、そのフレームデータを用いて読影を行なうことができる。
(Interpretation (observation))
When the collection of the frame data is completed by the above-described scan, the doctor can perform interpretation using the frame data as post-processing.
この読影に供するコントローラ57の一連の処理を図19〜23のフローチャートに、その読影に伴う動作例を図21〜39の説明図に示す。なお、このコントローラ57は、格別には言及しないが、パノラマ画像の生成や部分断面画像の生成などの画像生成に関わる処理については、かかる処理を画像プロセッサ56と共同して実行する。
A series of processes of the
図19に示すように、コントローラ57は、操作者からの指令に応答して、患者、すなわち読影対象の入力を受け付ける(ステップS31)。これにより、例えば患者ID、撮影日時などの読影対象を特定する情報が入力されると、コントローラ57はかかる情報で特定される被験者Pのフレームデータを画像メモリ56から自分のワークエリアに読み出す(ステップS32)。
As shown in FIG. 19, the
次いで、コントローラ57は、画像プロセッサ56に標準面のパノラマ画像の再構成及び当該パノラマ画像のモニタ60への表示を指令する(ステップS33,S34)。これにより、図21に模式的に示すように、被験者Pの歯列の標準面のパノラマ画像Ppanoがモニタ60に表示される。このパノラマ画像Ppanoは、X線透過像と同様に標準面に沿った断面構造を描出している。
これらの処理は、前述したゲインの事前計測のときの処理と同様である(図13、ステップS3,S4参照)。ここまの処理は、読影作業の準備段階に相当する。なお、標準面は予め選択的に指定できることが望ましい。
Next, the
These processes are the same as the processes at the time of the prior gain measurement (see steps S3 and S4 in FIG. 13). The processing up to this point corresponds to the preparation stage of the interpretation work. It is desirable that the standard surface can be selectively specified in advance.
コントローラ57は、次いで、現在表示されているパノラマ画像上で、医学的に興味のある部分領域を更に焦点を最適化して観察したいか否かについて、操作器58を経由した操作者からの情報に基づいて判断する(ステップS35)。この判断がYES、すなわち、部分(局地)領域に絞って焦点ボケのより少ない画像(歯及び歯茎の部分断面像)を観察したい場合であると判断されるときには、コントローラ57はステップS36以降の処理に移る。一方で、NOの判断のとき、すなわち読影処理を中止するか、又は、別の処理に移行する場合には、コントローラ57はその処理を図示しないルーチンに移行させる。
Next, the
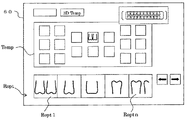
上述したステップS35で部分領域の焦点最適化を実施すると判断した場合(YES)、コントローラ57は次いでモニタ60の画面にパノラマ画像と最適化画像域のウィンドウを分割表示させる(ステップS36)。この分割表示では、図24に例示するように、歯茎部分を含む歯列全体のパノラマ画像のウィンドウが画面上側に表示され、その下側に最適化画像域Roptのウィンドウが表示される。最適化画像域Roptは複数枚の部分領域の焦点最適化画像Popt1〜Poptnを収納可能になっている。つまり、後述するように、本実施形態では、部分領域の焦点最適化を複数回、実施して複数枚の焦点最適化画像を得ることができるようになっている。なお、1回の読影作業に際して可能な焦点最適化の回数(焦点最適化画像の枚数)は任意でよい。
If it is determined in step S35 described above that the focus optimization of the partial area is to be performed (YES), the
次いで、コントローラ57は、操作者が操作器58を使って、上述した部分領域を指定するためのROI(region of interest)を画面上に設定したか否か判断する(ステップS37)。この判断は、ROIの情報が操作者によって与えられるまで繰り返し実行される。このROIを指定する情報が入力されると、コントローラ57はそのROIをパノラマ画像Ppano上に重畳表示する(ステップS38)。このROIは、例えば図25に示すように設定される。ここでは矩形状のROIで表しているが、形状は任意である。また、図26(A),(B)に示すように、ROIの設定の仕方も様々で、1つの歯のみに注目してもよいし、複数の歯を含むように設定してもよい。
Next, the
さらに、コントローラ57は、設定したROIの位置がそれで良いのか否か、操作者とインターラクティブに検討する。すなわち、ROIの位置の確定操作の情報を操作者に入力させて位置確定か否かを判断し(ステップS39)、位置確定であれば(ステップS39、YES)、確定した部分領域の画像を拡大表示するか否かを操作情報から判断する(ステップS40)。拡大表示を示す操作情報が入力されると(ステップS40、YES)、パノラマ画像Ppanoに指定拡大率の拡大画像を重畳表示する(ステップS41)。この拡大の概要を図27に示す。この拡大表示が終わると、又は、拡大表示をしない場合(ステップS40、NO)、コントローラ57は次いで、操作情報を収集してかかるROIの指定作業を中止するか否かを判断し(ステップS41)、中止する場合には次いで、部分領域の焦点最適化の作業そのものを終了するのか否か、操作者に問う(ステップS42)。ROIの指定作業を中止するが焦点最適化作業は中止しない場合、すなわちROIの指定作業をやり直す場合には(ステップS42、YES;ステップS43、NO)、その後の処理はステップS27に戻される。焦点最適化の作業も中止する場合(ステップS43、YES)、コントローラ57は一連の処理を終了する。
Further, the
これに対し、ROIの指定作業を中止しない場合(ステップS42,NO)、部分領域の指定作業が終わり、その領域が位置的に最終的に確定したことになる。この状態になると、後述するように、部分領域の焦点最適化やテンプレートを用いた読影などの様々な処理に移行する。 On the other hand, when the ROI designation work is not stopped (step S42, NO), the partial area designation work is completed, and the area is finally finally determined. In this state, as will be described later, the process shifts to various processes such as focus optimization of a partial region and interpretation using a template.
一方、上述したステップS39がNOの判断のときには、操作者はROIの位置を更に変更したいと欲している場合である。このときには、コントローラ57から操作器58を介して操作者からのROIの位置を変更する情報を受け付ける(ステップS44〜S46)。この位置変更には、本実施形態では3つの態様を用意している。1つ目の態様は、パノラマ画像Ppano上の2次元的位置そのものの変更である。このときには、ROIの別の指定位置を、操作者が欲する変更位置として受け付ける(ステップS44)。
On the other hand, when the above-described step S39 is NO, the operator wants to further change the position of the ROI. At this time, information for changing the position of the ROI from the operator is received from the
2つ目の態様は、指定したROIの位置はOKであるが、歯列の奥行き方向の前側又は奥側(後ろ側)の別の平行な断面位置を見たいときに使用される。「歯列の奥行き方向」とは歯列(すなわち、システム的には予め設定した標準面)に直交する方向を言う。図28に、この奥行き方向DdpにおけるROI指定に係る部分断面の移動の概念を示す。この場合には、予めゲインを計測してある奥行き方向の所定範囲について、その距離情報の入力で変更指定される。例えば、歯列の正面側から見て奥側に「5mm移動」、手前側に「3mm移動」といった距離情報の入力が行なわれる。 The second mode is used when the position of the designated ROI is OK, but it is desired to see another parallel cross-sectional position on the front side or the back side (back side) in the depth direction of the dentition. The “depth direction of the dentition” refers to a direction orthogonal to the dentition (that is, a standard surface preset in terms of system). FIG. 28 shows the concept of movement of a partial cross section related to ROI designation in the depth direction Ddp. In this case, a predetermined range in the depth direction in which the gain is measured in advance is designated to be changed by inputting the distance information. For example, distance information such as “5 mm movement” on the back side and “3 mm movement” on the front side when viewed from the front side of the dentition is input.
さらに、3つ目の態様は、指定したROIの位置の部分断面の角度を変更して見たい、すなわちROIが指定する断面を視野とするが、視野を持ちながらも、指定断面の傾斜させた新しい断面の観察を欲するときに使用される。なお、この傾斜の処理は、断面を傾斜(回転)させる分だけ、投影方向を斜めに変えることを意味する。傾斜(回転)させる角度としては、通常、数度から数十度である。 Furthermore, in the third mode, the angle of the partial cross section at the position of the designated ROI is to be changed, that is, the cross section designated by the ROI is used as the field of view, but the designated section is inclined while having the field of view. Used when wanting to observe a new section. This tilting process means that the projection direction is changed diagonally by the amount of tilting (rotating) the cross section. The angle for tilting (rotating) is usually several degrees to several tens of degrees.
図29に、このROIで指定された断面の傾斜(回転)の概念を説明する。なお、これらの断面の傾斜は、中心軸の位置、傾斜方向、及び傾斜角度で決まるものである。このため、断面の「傾斜」は、断面の中心軸を中心とした「回転(回動)」であるとも言えるので、以下、用語「傾斜」で代表させる。図29(A)〜(C)に示す図は、ROIで指定された断面の縦方向(Z軸)方向の中心位置、上端位置、及び下端位置を中心として、その断面を所望角度だけ傾斜させるものである。また、図29(D)〜(F)に示す状態は、ROIで指定された断面の横方向(x方向)の中心位置、左端位置、及び右端位置を中心として、その断面を所望角度だけ傾斜させるものである。なお、ROIで指定された局所的な断面を傾斜させる限度は、その断面がゲインを事前設定してある奥行き方向の範囲内とする。これにより、読影の意味が出てくる。 FIG. 29 explains the concept of the inclination (rotation) of the cross section designated by this ROI. Note that the inclination of these cross sections is determined by the position of the central axis, the inclination direction, and the inclination angle. For this reason, it can be said that the “inclination” of the cross section is “rotation (rotation)” about the central axis of the cross section, and therefore, the term “inclination” will be represented below. 29 (A) to 29 (C) incline the cross section by a desired angle around the center position, the upper end position, and the lower end position in the vertical direction (Z-axis) direction of the cross section specified by the ROI. Is. In addition, the states shown in FIGS. 29D to 29F are obtained by inclining the cross section by a desired angle with respect to the center position, the left end position, and the right end position in the horizontal direction (x direction) of the cross section specified by the ROI. It is something to be made. The limit for inclining the local cross section designated by the ROI is within the range in the depth direction in which the gain is preset for the cross section. As a result, the meaning of image interpretation comes out.
なお、ROIで指定された断面を、奥行き方向の位置も変更し(平行移動)、かつ、傾斜させた断面で観察したい場合には、上述したステップS45、S46の処理が併用される。 Note that when the cross section specified by the ROI is also changed in the depth direction (translation) and it is desired to observe the tilted cross section, the processes of steps S45 and S46 described above are used together.
このようにして焦点最適化の対象となる部分断面が決まると、コントローラ57はコントラスト強調処理を行う(ステップS47)。このコントラスト強調処理は、従来から知られている様々手法を用いて実行すればよい。これには、例えば、米国特許第5,467,404号公報、米国特許第5,960,123号公報に記載のものが知られている。
When the partial cross section targeted for focus optimization is determined in this way, the
次いで、コントローラ57は、コントラストの強調処理が終わった部分断面について、前述したと同様に、焦点最適化の処理を実行する(ステップS48)。
Next, the
この焦点最適化の処理(再構成)が施されてボケが改善された部分断面の画像が最適化画像として、その断面の位置情報(標準断面の位置及び角度に対する、奥行き方向の位置及び角度)と共に、元のパノラマ画像Ppano上に重畳して表示される(ステップS49)。この表示例を図30に示す。なお、同図において、焦点が最適化された画像上の歯などの構造物は少し太めの線を用いて表示し、焦点最適化の処理に付されたことを模式的に示している。他の画像図も同様である。
この最適化された画像自体は、X線透過像の同様の画像状態を呈しており、歯茎に植設されたそれぞれの歯の内部構造を表している。焦点が最適化されているので、歯茎や歯の断面の構造がコントラスト良く描出されており、それらの構造物や病変部の描出能も高まっている。
The partial cross-section image that has been subjected to this focus optimization processing (reconstruction) and has improved blur is used as the optimized image, and the position information of the cross-section (the position and angle in the depth direction with respect to the position and angle of the standard cross-section) At the same time, it is displayed superimposed on the original panoramic image Ppano (step S49). This display example is shown in FIG. In the figure, structures such as teeth on the image with optimized focus are displayed using a slightly thicker line, and schematically show that they have been subjected to focus optimization processing. The same applies to other image diagrams.
This optimized image itself exhibits a similar image state of an X-ray transmission image and represents the internal structure of each tooth implanted in the gums. Since the focus is optimized, the structures of the gums and the cross-section of the teeth are depicted with good contrast, and the ability to depict these structures and lesions is also enhanced.
この部分断面の最適化画像(再構成画像)は、例えば操作者のドラッグ・アンド・ドロップ操作に応じて、最適化画像域Roptの最初の領域に焦点最適化画像Popt1として、例えば図31に示すように貼り付けられる(ステップS50)。このように手動で貼り付ける場合、最適化画像域Roptのどの領域に貼り付けるかは操作者の自由である。例えば焦点最適化の処理順に端の領域から順に貼り付けていってもよいし、最適化画像域Ropt内で意味を持たせて自由に貼付け領域を選択してもよい。 This optimized image (reconstructed image) of the partial cross section is shown as, for example, in FIG. 31 as a focus optimized image Popt1 in the first area of the optimized image area Ropt in accordance with the drag and drop operation of the operator, for example. (Step S50). When manually pasting in this way, it is up to the operator which region of the optimized image region Ropt to paste. For example, it may be pasted in order from the end region in the focus optimization processing order, or the pasted region may be freely selected with meaning in the optimized image region Ropt.
コントローラ57は、次いで、操作者の操作器58を介した操作情報から再び次のROIの指定、すなわち次の部分断面の指定があるか否かを判断する(ステップS51)。この判断がYESとなるときには、操作者が次に焦点最適化したい部分断面を指定した場合であるので、処理を前述したステップS37に移行させる。
Next, the
これに対して、ステップS51でNOの判断が下される場合、部分断面の指定及びその断面の焦点最適化の処理が終わったときである。このときの例を図32に示す。次いで、コントローラ57は操作者とインターラクティブに交信して、最適化画像域Roptに貼り付けた1枚又は複数の焦点最適化画像Popt1〜Poptnの同領域Ropt内で画像の並び替えを行なうか否か判断する(ステップS52)。並び替えが希望されていると判断した場合にのみ(ステップS52,YES)、コントローラ57は手動操作に応じて任意の順に又はROI設定順に自動的に焦点最適化画像Popt1〜Poptnの最適化画像域Ropt内での並び替えを行なう(ステップS53)。この並び替えの処理については更に後述する。
On the other hand, when the determination of NO is made in step S51, it is when the designation of the partial cross section and the focus optimization processing for the cross section are finished. An example at this time is shown in FIG. Next, the
次いで、コントローラ57は操作者情報に応じて最適化画像域Roptに貼り付けた焦点最適化画像Popt1〜Poptnを画像メモリ54に保存(格納)するか否かを判断する(ステップS54)。この判断がYESとなる場合、その保存を実行する(ステップS55)。
Next, the
(3次元テンプレートの使用)
次いで、コントローラ57は、操作者からの情報に基づいて、歯列の医学的形態(構造)と結び付けた部分断面の焦点最適化画像の配列パターンを有するテンプレートを用いて読影を実施するか否かを判断する(ステップS56)。なお、このテンプレートは従来のものとは違うので、本発明者は、このテンプレートを3次元(3D)テンプレートと呼んでいる。このように、テンプレートに「3次元(3D)」と冠して呼ぶ理由は、貼り付ける画像情報が単にパノラマ画像から切り出した部分断面の画像であることのみならず、歯列に沿った標準面に直交する方向(奥行き方向)の部分断面の画像情報がその位置情報と共に提示されることに拠る。なお、この3Dテンプレートの配列パターンなどの画像の構成及び位置は、ユーザの好みによって自在にカスタマイズできるようになっている。
(Use of 3D templates)
Next, based on information from the operator, the
操作者が3Dテンプレートを使用することを指令した場合(ステップS56,YES)、その3Dテンプレートの背景としてパノラマ画像を使うか否かを操作者情報から決める(ステップS57)。パノラマ画像Ppanoを使用しない場合(ステップS57,NO)、モニタ60の画面上に3Dテンプレートの画面のみが表示される。つまり、3Dテンプレートのデータが画像メモリ24から読み出され、そのデータに拠り3DテンプレートTempがモニタ60の画面上側のそれまでパノラマ画像Ppanoが表示されていた領域にこれに代わって単独で表示されるとともに、これと最適化画像域Roptとが分割して表示される。この状態を図33に概念的に示す。
When the operator instructs to use the 3D template (YES in step S56), it is determined from the operator information whether to use the panoramic image as the background of the 3D template (step S57). When the panoramic image Ppano is not used (step S57, NO), only the 3D template screen is displayed on the screen of the
これに対して、パノラマ画像を使う場合(ステップS57,YES)、先に収集しているパノラマ画像を背景として、この背景像上に3Dテンプレートの画面がモニタ60に重畳表示される。つまり、3Dテンプレートのデータが画像メモリ24から読み出され、そのデータに拠り3DテンプレートTempがパノラマ画像Ppano上に重畳するととともに、これと最適化画像域Roptとが分割して表示される(ステップS59)。この状態を図34に概念的に示す。
On the other hand, when a panoramic image is used (YES in step S57), the 3D template screen is superimposed and displayed on the
次いで、コントローラ57は、操作者からの指令に応答して、このように用意した3DテンプレートTempに、焦点を最適化した部分画像(焦点最適化画像)Popt1〜Poptnを貼り付ける(ステップS60:図35、36参照)。この貼付け処理は後に詳述する。
Next, in response to a command from the operator, the
この貼付けが終わると、コントローラ57は、貼付けられた焦点最適化画像Popt1〜Poptnを3Dテンプレートのデータと共に画像メモリ24に保存する(ステップS61)。このため、次回、必要に応じて、3DテンプレートTempに貼付け保存されている焦点最適化画像Popt1〜Poptnを画像メモリ24から即座に読み出して、テンプレート保存画像として容易に表示させることができる。
When the pasting is finished, the
なお、上述し3DテンプレートTempの一部には、焦点最適化画像Popt1〜Poptnと同等に、画像メモリ54に保存されている別体である口内X線撮影装置からの画像を貼り付けるようにしてもよい。この貼付け制御もコントローラ57の制御の元で実行できる。
It should be noted that an image from a separate intraoral X-ray imaging apparatus stored in the
(パノラマ画像の再焦点最適化)。 (Refocus optimization of panoramic images).
さらに、コントローラ57は、操作者からの操作情報に基づいて既に収集している、基礎となる標準面のパノラマ画像Ppanoを、上述のように焦点最適化画像Popt1〜Poptnが持つ3次元の位置情報を用いて再度、その全体の焦点を最適化(再構成)するか否かを判断する(ステップS62)。このパノラマ画像Ppanoに対する再度の焦点最適化は、部分的に焦点最適化した画像Popt1〜Poptnが有する位置情報を有効に利用しようとするものである。つまり、パノラマ画像Ppanoは、標準面に沿って画一的に焦点最適化しただけでは臨床の要求を満たすことができないことが多い。このため、少しでも被検体の個体差に応じた実際の歯列断面に沿って焦点最適化した、全体でボケの少ないパノラマ画像を提供しようとする意図がある。
Further, the
このため、ステップS62でYESの判断となる場合、焦点最適化した画像Popt1〜Poptnが有する位置情報を利用して、パノラマ画像全体の焦点を最適化する処理(再構成)が再度、実行される(ステップS63)。この再度の焦点最適化は後述する。 For this reason, when the determination in step S62 is YES, the processing (reconstruction) for optimizing the focus of the entire panoramic image using the position information of the focus optimized images Popt1 to Poptn is executed again. (Step S63). This second focus optimization will be described later.
なお、この再焦点最適化の処理は、3DテンプレートTempの使用とは別に、単独で、パノラマ画像Ppanoと組み合わせて実行するようにしてもよい。これにより、パノラマ画像Ppanoに写っている歯列全体に対して半自動最適化焦点化の処理を施すことができる。このため、比較的簡単な手法で、パノラマ画像Ppanoの表示構造物の全体の焦点ボケを簡便的に改善することができる。このとき、ROIの設定箇所と設定数が多いほど、最適化によるボケ除去の精度は高くなる。 Note that this refocus optimization processing may be executed independently and in combination with the panoramic image Ppano separately from the use of the 3D template Temp. Thereby, the process of semiautomatic optimization focusing can be performed with respect to the whole dentition shown in the panoramic image Ppano. For this reason, it is possible to easily improve the overall defocus of the display structure of the panoramic image Ppano by a relatively simple method. At this time, the greater the number of ROI setting locations and the number of settings, the higher the accuracy of blur removal by optimization.
(焦点最適化画像の並び替え処理)
前述したコントローラ57の一連の処理において、ステップS53では、最適化画像域Roptに貼り付けた1枚又は複数の焦点最適化画像Popt1〜Poptnについて並び替えが実行される。この処理を図21のサブルーチンに示す。
(Focus optimized image rearrangement process)
In the above-described series of processing of the
この並び替え処理には、3つの並び替えモード1〜3が用意されている。並び替えモード1は、歯列の構造の属性に応じて自動的に並べ替えるモードであり、その属性の設定の仕方はカスタマイズできる。並び替えモード2は、基礎となるパノラマ画像Ppano上で部分領域を規定するためにするROIの指定時のその指定順に自動的に並び替えるモードである。もう1つの並び替えモード3は、最適化画像域Roptに貼り付けられている1枚又は複数の焦点最適化画像Popt1〜Poptnを操作者からのドラッグ・アンド・ドロップなどの操作情報に応じて手動で任意に並び替えるものである。
In this rearrangement process, three
このため、コントローラ57は操作情報が並び替えモード=並び替えモード1〜3の何れを指しているか否かを判断する(ステップS5301〜S5303)。
Therefore, the
これが並び替えモード1であると判断される場合(ステップS5301)、コントローラ57は貼り付けてある焦点最適化画像Popt1〜Poptnを提供している部分断面の3次元位置を、その焦点最適化に用いたゲイン(すなわち標準面からの3次元的な距離情報)を元に、標準面からの距離差として演算する(ステップS5304)。そして、この距離差情報からそれぞれの部分断面の標準面からの断面姿勢のずれ(標準面に直交する各奥行き方向の標準面からの距離及び標準面からの傾斜角度)を認識して、そのずれ情報を記憶する(ステップS5305)。図37(A)には歯の標準面からの距離のずれを概念的に示し、図37(B)には歯の標準面に対する角度の傾斜を概念的に示す。なお、図37(C)には、歯の形状が標準面に対して湾曲している状態を示す。この湾曲状態の場合にも、湾曲面に沿って認識されるゲインからそのずれ情報を、湾曲面の位置の関数としての距離情報を求めることができる
次いで、コントローラ57は、距離のずれや傾斜角度からそれらの焦点最適化画像Popt1〜Poptnが被検体の歯列のどの部分から収集されたものであるのか、予め記憶している位置と角度の記憶テーブルを参照するなどして、推定する(ステップS5306)。この後、コントローラ57は、最適化画像域Ropt内において焦点最適化画像Popt1〜Poptnを自動的に並び替えながら貼り付ける(ステップS5307)。例えば、最適化画像域Roptの画像領域が例えば画面に対面して左側から、患者の右側の奥歯から前歯、そして左側の奥歯(例えば上側、下側の歯列別に)の順に自動的に並べ替えられる。
If it is determined that this is the rearrangement mode 1 (step S5301), the
ただし、焦点最適化画像Popt1〜Poptnの歯列における収集位置の推定精度によっては、必ずしも順番にならないことも有り得るので、その場合には後述する手動の並び替えを行なって整理すればよい。いずれにしても、この並び替えモード1によれば、その並び替えの少なくとも大半を自動的にシステム側で行なってくれる。したがって、その操作性は良好である。
However, depending on the estimation accuracy of the collection position in the dentition of the focus optimized images Popt1 to Poptn, the order may not necessarily be in order, and in this case, manual rearrangement described later may be performed and rearranged. In any case, according to the
並び替え処理が並び替えモード2で実行されると判断される場合(ステップS5302)、コントローラ57は、焦点最適化画像Popt1〜Poptnを生成したときのROIの指定順情報を画像メモリ24から読み出す(ステップS5308)。次いで、その指定順情報にしたがって焦点最適化画像Popt1〜Poptnを、最適化画像域Ropt内において例えば片側から指定順になるように自動的に並び替える(ステップS5309)。
When it is determined that the rearrangement process is executed in the rearrangement mode 2 (step S5302), the
さらに、並び替え処理が並び替えモード2で実行されると判断される場合(ステップS5302)、コントローラ57は、操作者からの順番指定情報を入力して(ステップS5310)、焦点最適化画像Popt1〜Poptnを、最適化画像域Ropt内において例えば片側から指定順になるように並び替える(ステップS5311)。
Further, when it is determined that the rearrangement process is executed in the rearrangement mode 2 (step S5302), the
このように何れかのモード1(〜3)で、焦点最適化画像Popt1〜Poptnを並び替えることによって、最適化画像域Roptの貼付け画像群に一定の規則性ができる。このため、最適化画像域Roptの貼付け画像Popt1〜Poptnを観察するときに読影者の歯列の3次元的な把握がし易くなり、読影作業の能率向上にも寄与する。また、保存した貼付け画像Popt1〜Poptnを再び読み出して保存するときに整理がし易くなるなどの作用効果がある。 As described above, by rearranging the focus optimized images Popt1 to Poptn in any mode 1 (to 3), a certain regularity can be formed in the pasted image group in the optimized image region Ropt. For this reason, when observing the pasted images Popt1 to Poptn in the optimized image area Ropt, it becomes easy to grasp the dentition of the interpreter three-dimensionally, which contributes to the improvement of the efficiency of the interpretation work. In addition, there is an effect that the stored pasted images Popt1 to Poptn are read out and stored again, and are easily organized.
(焦点最適化画像の3Dテンプレートへの貼付け処理)
前述したコントローラ57の一連の処理において、別のステップS60では、最適化画像域Roptに貼り付けた1枚又は複数の焦点最適化画像Popt1〜Poptnを3Dテンプレートに貼り付ける処理が実行される。この処理を図22のサブルーチンに示す。
(Focus optimization image pasting process to 3D template)
In a series of processes of the
コントローラ57は、まず、操作者の操作情報から操作者が自動的な貼付け作業を望んでいるか又は手動の貼付け作業を望んでいるかについて判断する(ステップS6001)。この判断が自動貼付けの希望を示している場合(ステップS6001,YES)、コントローラ57は、上述した並び替え時の演算法と同様に、貼り付けてある焦点最適化画像Popt1〜Poptnを提供している部分断面の3次元位置を、その焦点最適化に用いたゲイン(すなわち標準面からの3次元的な距離情報)を元に、標準面からの距離差として演算し、それらの演算情報を一次記憶する(ステップS6001)。なお、この演算は並び替え時に既に行なっている場合にはそれを流用してもよい。そして、この演算情報を用いて焦点最適化画像Popt1〜Poptnを提供している部分断面の歯列における位置を推定する(ステップS6002)。
First, the
次いで、コントローラ57は、この推定結果に基づいて、3Dテンプレートにおける対応する画像位置を特定する(ステップS6003)。3Dテンプレートを構成する各画像領域IM1、IM2、…の位置は、例えば図38などに模式的に示すように、上側歯列、下側歯列、左側奥歯、前歯、右側奥歯の如く、視覚的に歯列全体構造を把握し易くするように配置してある。このため、焦点最適化画像Popt1〜Poptnを提供している部分断面の歯列における位置と3Dテンプレートの画像位置との対応表を例えば記憶テーブルの形で画像メモリ24に予め記憶させ、この記憶テーブルを参照することで、3Dテンプレートにおける対応する画像位置を特定することができる。
Next, the
この特定結果に応じてコントローラ57は、3Dテンプレートの各画像領域IM1、IM2、…の対応箇所に焦点最適化画像Popt1〜Poptnを自動的に貼り付ける(ステップS6004)。したがって、この自動貼付けの場合には、図33に示した画面状態から図36に示した画面状態に直接、即座に変換される(図33→図36)。
In accordance with this identification result, the
これに対して、ステップS6001の判断結果がNO(手動貼付け)となる場合、コントローラ57はステップS6005〜S6008)の処理を行う。すなわち、コントローラ57は操作者から焦点最適化画像Popt1〜Poptnのうちの1つを指定する情報を受け付け(ステップS6005)、次いで、3Dテンプレートのうちの所望の画像位置を指定する情報を受け付ける(ステップS6006)。このため、コントローラ57は、操作者からの操作情報に応答して、指定される焦点最適化画像Popt1(〜Poptn)を、3Dテンプレートの指定される画像位置IM1(〜IMn)に貼り付ける。コントローラ57は貼付け完了か否かを操作情報から判断しており、操作者がその旨を設定するまで上述したステップS6005〜S6007の処理を繰り返してインターラクティブに実行する。これにより、操作者の意図を反映した手動操作に伴う3DテンプレートTempへの画像が貼り付けられる。
On the other hand, when the determination result of step S6001 is NO (manual pasting), the
このように自動貼付けであるか手動操作を伴う貼付けであるかを問わず、3DテンプレートTempに焦点最適化画像Popt1〜Poptnを貼り付けて保存することができる。前述した如く、3DテンプレートTempは歯科医毎に又は歯科医院(病院)毎にカスタマイズでき、かつ、画像位置に歯列の構造に対応した意味つけを持たせた3DテンプレートTempとして形成可能になっている。このため、焦点最適化画像Popt1〜Poptnを最適化したパターンで保存でき、過去に収集・生成した焦点最適化画像Popt1〜Poptnの読出しや読影もより効率的にできる。 In this way, regardless of whether it is automatic pasting or pasting with manual operation, the focus optimized images Popt1 to Poptn can be pasted and stored on the 3D template Temp. As described above, the 3D template Temp can be customized for each dentist or for each dental clinic (hospital), and can be formed as a 3D template Temp having a meaning corresponding to the structure of the dentition at the image position. Yes. Therefore, the focus optimized images Popt1 to Poptn can be stored in an optimized pattern, and the focus optimized images Popt1 to Poptn collected and generated in the past can be read and interpreted more efficiently.
(パノラマ画像全体の再焦点最適化処理)
前述したコントローラ57の一連の処理において、別のステップS63では、複数の焦点最適化画像Popt1〜Poptnが持つ位置情報に基づいて読影の原画像として機能したパノラマ画像の全体を再度、焦点最適化の処理に付すことができる。この処理を、図23のサブルーチンに示す。
(Refocus optimization process for the entire panoramic image)
In the above-described series of processing of the
コントローラ57は、パノラマ画像Ppano上に複数のROIが設定されており、かつ、それらのROIで特定される部分断面の画像の焦点が最適化されている状態か否かを判断する(ステップS6301)。このとき、それぞれの部分断面の位置は、標準面の位置と同じことも違うこともある。上述の状態が判断できると、コントローラ57は、各ROIの横方向の中心位置が標準面からどの程度ずれているのか、その記憶しているゲインからずれ量を把握する(ステップS6302)。
The
次いで、コントローラ57は、把握したずれ量を用いて標準面の位置を補正して実際に最適化したい断面を決める(ステップS6303)。このとき、部分断面の位置に由来するずれ量を用いて補間しながら、実際の最適化断面を決める(図39の上段、波形DM参照)。この後、補正した標準面の位置情報をルックアップテーブルLUTに参照させて、対応するゲインのデータをゲインカーブとして得る(ステップS6304:(図39の中段参照))。次いで、このゲインカーブを積分してスピードカーブを補正する(ステップS6305:(図39の下段参照))。さらに、先に収集していたフレームデータを読み出す(ステップS6306)。
Next, the
このように準備が整うと、補正したスピードカーブとフレームデータとを用いて再構成を実行し、前述した如く、再度、パノラマ画像全体を生成する(ステップS6307)。このパノラマ画像は表示するとともに、必要に応じて、そのデータを保存する(ステップ6308)。この表示の際、最初のパノラマ画像と比較するように表示してもよい。 When preparation is completed in this way, reconstruction is executed using the corrected speed curve and frame data, and the entire panoramic image is generated again as described above (step S6307). The panoramic image is displayed and the data is saved as necessary (step 6308). In this display, the image may be displayed so as to be compared with the first panoramic image.
このように、本実施形態によれば、最初のパノラマ画像(ベース画像)上でのROI設定で得た複数の焦点最適化画像Popt1〜Poptnが持つ位置情報を有効に活用して、パノラマ画像全体のコントラストを向上させることができる。 As described above, according to the present embodiment, the entire panoramic image is obtained by effectively using the position information of the plurality of focus optimized images Popt1 to Poptn obtained by the ROI setting on the first panoramic image (base image). The contrast can be improved.
以上のように、本実施形態に係るデジタル型の歯科用パノラマ画像撮影装置によれば、従来のものとは異なり、歯科医の要求に十分に応えるパノラマ画像を提供することができる。 As described above, the digital dental panoramic image photographing apparatus according to this embodiment can provide a panoramic image that sufficiently meets the demands of a dentist, unlike the conventional one.
具体的には、1回の撮影によって収集した同一のフレームデータを使って、診断的に診たい局所的部位の断面について平行移動を行なったり、傾斜(回転)によって投影方向を変えたりした画像を何度でも再構成することができる。この断面を平行に移動する距離や傾斜(回転)させる角度は、読影医師が定量的に指定することができる。つまり、読影医師は、表示した標準面のパノラマ像を見ながらインターラクティブに局所的断面を動かして、その断面の表示される歯や歯茎の画像を観察することができる。これにより、例えば、1つの歯の更に奥側がように痛んでいるのか、病巣が歯茎のどの位まで及んでいるのかといった情報を3次元的に得ることができる。しかも、その局所的部位の断面の位置を決めるベース画像となる標準面のパノラマ画像についても、予め設定してある数種類の標準断面の中から、被検体の実際の歯列の状況になるべく合致した断面を標準面として選択することができる。 Specifically, using the same frame data collected by one imaging, an image obtained by translating a cross-section of a local part to be diagnosed diagnostically or changing the projection direction by tilting (rotation) is used. It can be reconfigured any number of times. The interpretation doctor can quantitatively specify the distance to move the cross section in parallel and the angle to tilt (rotate) it. That is, the image interpretation doctor can move the local cross section interactively while viewing the displayed panoramic image of the standard surface, and observe the image of the tooth or gum on which the cross section is displayed. Thereby, for example, information such as whether the further back side of one tooth hurts or how far the lesion extends to the gum can be obtained three-dimensionally. In addition, the standard plane panorama image that serves as the base image that determines the position of the cross-section of the local part also matches the actual dentition of the subject from several preset standard cross-sections as much as possible. The cross section can be selected as the standard plane.
このため、撮影位置(断面)を患者の歯列に沿った最適な断面に設定することが重要ではあるとしても、それにはそれほど神経質になる必要はない。つまり、数種類の予め用意されている標準面の中からベストなものを選択して撮影に臨むだけでよい。この撮影によって収集されたフレームデータを使って、上述したように、その後の読影を自在に行なうことができるのである。これにより、従来指摘されていた、最適断面の設定に対する操作者の負担が著しく軽減されるので、操作者に要求される熟練度は緩和される。 For this reason, even if it is important to set the imaging position (cross section) to an optimal cross section along the patient's dentition, it does not need to be so nervous. That is, it is only necessary to select the best one from several types of standard surfaces prepared in advance and start shooting. As described above, the subsequent interpretation can be freely performed using the frame data collected by this photographing. As a result, the operator's burden on the setting of the optimum cross section, which has been pointed out in the past, is remarkably reduced, and the skill level required of the operator is alleviated.
このように、適度な最適さで収集した断面(標準面)のパノラマ画像上で指定される局所的断面の画像、及び、この断面を3次元的に位置変更した別の断面の画像は、常に、予め事前計測して保管されているゲインを使って、ボケの少ない最適焦点化画像として再構成される。したがって、ボケが少ない分、歯や歯茎の構造情報も豊富で且つ精度が良い。それだけ歯科医の診断上の負担も軽減される。 As described above, the image of the local cross section specified on the panoramic image of the cross section (standard plane) collected with the appropriate optimization and the image of another cross section obtained by repositioning the cross section three-dimensionally are always used. Then, it is reconstructed as an optimally focused image with less blur using a gain that has been measured in advance and stored. Therefore, since there is little blur, the structure information of teeth and gums is abundant and accurate. The diagnosis burden on the dentist is reduced accordingly.
また、インターラクティブにROI指定した断面の画像は、位置情報と共に表示される。例えば、ROIで指定した断面を標準面よりも5mm奥側に平行移動させた断面である旨の位置情報、ROIで指定した断面をその縦方向の中心を通る軸の周りに下側が手前になるように20度傾けた(回転させた)断面である旨の位置情報などと共に表示される。このため、読影医は、歯や歯茎の内部構造の距離(感)を把握しながら、読影を行なうことができる。これにより、読影医は、歯列の形状などの個人差を考慮して、「少し奥の部分を又は手前の部分を診たい」、「斜めの歯に沿ってその断面を診たい」、「歯の厚さ方向に沿った断面を診たい」、などの、従来では殆ど困難であった断面観察を自在に行なうことができ、診断に有効な情報をより多く得ることができ、診断の精度向上に大きく寄与する。 In addition, an image of a cross section designated by ROI interactively is displayed together with position information. For example, position information indicating that the cross section designated by the ROI is a cross section translated 5 mm behind the standard plane, and the cross section designated by the ROI is on the lower side around an axis passing through the center in the vertical direction. The position information indicating that the section is tilted (rotated) by 20 degrees is displayed. For this reason, the image interpretation doctor can perform image interpretation while grasping the distance (feel) of the internal structure of the teeth and gums. In this way, the interpreting doctor considers individual differences such as the shape of the dentition, “I want to examine the part slightly behind or the front part”, “I want to examine the cross section along the diagonal teeth”, “ `` I want to examine the cross-section along the thickness direction of the tooth '', etc., and can perform cross-section observation that was almost difficult in the past, can obtain more information useful for diagnosis, and the accuracy of diagnosis Greatly contributes to improvement.
このように、1回の撮影で収集したフレームデータを使って歯列の内部情報を容易に且つ豊富に得ることができるので、従来のように、パノラマ画像を補完する別の撮影は殆ど不要になる。したがって、診断までの時間や手間が少なくて済み、患者スループットも良くなり、患者のX線被曝量の増大を抑えることができる。 In this way, the internal information of the dentition can be easily and abundantly obtained using the frame data collected in one imaging, so that there is almost no need for another imaging to complement the panoramic image as in the past. Become. Therefore, the time and effort required for diagnosis are reduced, patient throughput is improved, and increase in the patient's X-ray exposure can be suppressed.
さらに、本実施形態に係るパノラマ画像撮影装置は、従来の口内撮影装置のテンプレートと同様に、デジタル化し保存されるテンプレート画像の一部または、全部の画像をボケを極力抑えた画像を作成し、その画像を口内撮影装置の画像と置き換えて、テンプレート画像を作成可能なことを特徴とする。また、それぞれパノラマ画像から切り出されてテンプレートに貼り付けられた画像は、標準面(装置の軌道で設定された標準断層面)あるいは、所望の断面からのズレ量(距離)を把握できる構造とすることにより、解剖学的な歯列の構造あるいは、歯列以外の部位の位置関係を把握できる。 Furthermore, the panoramic image photographing apparatus according to the present embodiment creates an image in which blurring is suppressed as much as possible for part or all of the template image that is digitized and stored, as with the template of the conventional intraoral photographing apparatus, A template image can be created by replacing the image with an image of the intraoral photographing apparatus. Each image cut out from the panoramic image and pasted on the template has a standard plane (a standard tomographic plane set by the trajectory of the apparatus) or a structure that can grasp a deviation (distance) from a desired cross section. This makes it possible to grasp the anatomical structure of the dentition or the positional relationship of parts other than the dentition.
また、このようなテンプレート機能はカスタマイズできるから、各歯科診療所のニーズに応じて保管できるようにできる。また、ROIの中の焦点ボケを押さえられることから、従来パノラマ画像では取扱いが難しかった顎関節や頚動脈、歯槽骨、などの歯列以外の部位も鮮明に描出できるようになる。このため、患者情報の管理としてこれらの画像情報も含めてテンプレート化して保存することもでき、顎関節症、心疾患、骨粗鬆症などの診断情報などの新たな臨床情報を提供できる可能性が強い。 Moreover, since such a template function can be customized, it can be stored according to the needs of each dental clinic. In addition, since defocusing in the ROI can be suppressed, parts other than the dentition such as the temporomandibular joint, the carotid artery, and the alveolar bone, which have been difficult to handle with conventional panoramic images, can be clearly depicted. For this reason, it is possible to create a template including these image information for management of patient information and store it, and there is a strong possibility that new clinical information such as diagnostic information on temporomandibular disorders, heart disease, osteoporosis and the like can be provided.
また、別の態様として、各ROI画像が標準断層面あるいは所望の断層面からズレ量が把握できるため、例えば選択したROI画像から全体のパノラマ画像のズレ量を推定し補間することにより、よりボケないパノラマ画像を再構成することが可能であり、多忙を極めパノラマ画像のみしか保管しないような場合にも、ROI内画像を利用して良好な画像を提供することができる。 Further, as another aspect, since each ROI image can grasp the deviation amount from the standard tomographic plane or a desired tomographic plane, for example, by estimating and interpolating the deviation amount of the entire panoramic image from the selected ROI image, it is possible to further blur. It is possible to reconstruct a panoramic image that does not exist, and even when only the panoramic image is kept extremely busy, a good image can be provided using the image in the ROI.
このように、従来のテンプレートに比べて、本実施形態のものは、多断面断層機能を有し、しかも、パノラマ画像からボケ画像を修正したものをテンプレートに貼り付けるという基本的な相違がある。 As described above, compared with the conventional template, the present embodiment has a basic difference in that it has a multi-section tomographic function and a pasted image obtained by correcting a blurred image from a panoramic image is pasted on the template.
なお、この制御・演算装置12については、そのパノラマ画像を後処理する機能を有する部分については、別の制御・演算装置をスタンドアロン形式又はオンライン形式で用いるようにしてもよい。また、コントローラ57と画像プロセッサ56は同一のCPUで実行してもよい。
As for the control /
その他の付随する効果として、検出器32の有効幅(横幅)とその位置を装置の外部、すなわち操作器58からプリセット制御できるようにするとよい。これにより、従来のパノラマ断層軌道上で、歯の重なりが観測される場所において、等価的に検出器32の横幅とその位置を制御すれば、X線管31と検出器32のジオメトリが歯の重なりを可能な限り避けられるように設定することにより、従来診断の難しかった歯の重なりのある部分のパノラマ画像上での重なりを極力減らすことができ、診断を容易にすることもできる。
As another accompanying effect, it is preferable that the effective width (horizontal width) and the position of the
なお、前述した実施形態ではパノラマ画像Ppano上に設定するROIは一例として矩形状であって、そのROIを画像上で上側に真っ直ぐ立てた状態で設定するとしたが、このROIは、その形状は任意でよいことは勿論のこと、斜めに設定してもよい。この一例を、図40(A)に示すと、歯の形態などに合わせて斜めにROIobを設定している。この場合には、画像プロセッサ56は、同図(B)に示すように、斜めのROIobとその斜めのROIobを真っ直ぐ立てたときのROIn-obとの両方を含む例えば矩形状の大きいROIallを確定させる。これに応答して、画像プロセッサ56は、一番大きな矩形状のROIallを前述と同様に最適化し、その最適化した画像から斜めROIobを切り出し、その切り出した斜めROIobの画像を回転させて真っ直ぐ上向きのROIn-obの画像を最適化画像として得る。これにより、必ずしも上側に真っ直ぐ立ったROIを設定しなくても済むので、奥歯など複雑に入り組んだ構造の対しても、なるべく最適化したい部位のみを最初から選択して最適化に付することができる。
In the above-described embodiment, the ROI set on the panoramic image Ppano is rectangular as an example, and the ROI is set upright on the image. However, this ROI has an arbitrary shape. Of course, it may be set obliquely. An example of this is shown in FIG. 40A, in which the ROIob is set obliquely in accordance with the tooth form and the like. In this case, the
なお、本発明は上述した実施形態及び変形例で示す構成に限定されるものではなく、特許請求の範囲に記載の本発明の要旨を逸脱しない範囲で、さらに適宜に変形して実施可能であり、それらの変形も本発明の概念に含まれるものである。 It should be noted that the present invention is not limited to the configurations shown in the above-described embodiments and modifications, and can be implemented with appropriate modifications without departing from the spirit of the present invention described in the claims. These modifications are also included in the concept of the present invention.
1 パノラマ画像撮影装置
11 筐体
12 コンピュータ
14 撮影部
23 上下動ユニット
24 回転ユニット
30 回転駆動機構
31 X線管
32 検出器
41 高電圧発生器
53 バッファメモリ
54 画像メモリ
55 フレームメモリ
56 画像プロセッサ
57 コントローラ
58 操作器
60 モニタ
P 被験者
DESCRIPTION OF
Claims (9)
入射するX線に応じたデジタル量の電気信号を一定のフレームレートで出力する検出器と、
前記X線源及び前記検出器の対を、対象物を挟んで互いに対向させた状態で当該対象物の周りを移動させる移動駆動手段と、
この移動駆動手段が前記X線源及び前記検出器を前記対象物の周りを移動させることに伴って当該検出器が前記フレームレートで出力する電気信号をフレームデータとして順次記憶する記憶手段と、
この記憶手段に記憶されている前記フレームデータに基づいて、予め指定された所望断層面のパノラマ画像を生成するパノラマ画像生成手段と、
前記パノラマ画像のデータから、前記所望断層面のパノラマ画像のうちの指定された複数の部分領域それぞれの、前記移動駆動手段によって前記X線源及び前記検出器が移動される空間上の位置に応じた最適焦点の部分断面像を生成する部分断面像生成手段と、
前記対象物の撮影部位の属性に関連付けて2次元的に所定のフォーマットで配置された複数の貼付け領域から成るテンプレートを有し、当該テンプレートの前記複数の貼付け領域に前記複数の部分断面像を貼り付けて表示及び保存するテンプレート処理手段と、を備えたことを特徴とするパノラマ画像撮影装置。 An X-ray source that emits X-rays;
A detector that outputs a digital quantity of electrical signals corresponding to incident X-rays at a constant frame rate;
Moving drive means for moving the X-ray source and the detector around the object in a state of being opposed to each other with the object interposed therebetween;
Storage means for sequentially storing, as frame data, electrical signals output by the detector at the frame rate as the movement driving means moves the X-ray source and the detector around the object;
Panorama image generating means for generating a panoramic image of a desired tomographic plane designated in advance based on the frame data stored in the storage means;
Based on the panoramic image data, each of a plurality of designated partial areas of the panoramic image of the desired tomographic plane is in accordance with the position on the space where the X-ray source and the detector are moved by the movement driving means. Partial cross-sectional image generating means for generating a partial cross-sectional image of the optimal focus,
A template comprising a plurality of pasting areas that are two-dimensionally arranged in a predetermined format in association with the attribute of the imaging region of the object, and the plurality of partial cross-sectional images are pasted on the plurality of pasting areas of the template; A panoramic image photographing device comprising: a template processing means for displaying and storing the attached image.
前記テンプレート処理手段は、手動で操作する操作手段と、この操作手段に対してなされる手動操作情報に応じて前記複数の部分断面像を前記テンプレートの前記複数の貼付け領域に貼り付ける処理を行う貼付け処理手段と、を備えるパノラマ画像撮影装置。 The panoramic image photographing device according to claim 1,
The template processing unit is an operation unit that is manually operated, and a pasting process for pasting the plurality of partial cross-sectional images to the plurality of pasting regions of the template according to manual operation information performed on the operation unit. And a panoramic image photographing apparatus.
前記テンプレート処理手段は、前記パノラマ画像における前記複数の部分断面像の位置を認識する位置認識手段と、この位置認識手段により認識された位置に応じて前記複数の部分断面像を前記テンプレートの前記複数の貼付け領域に自動的に貼り付ける処理を行う貼付け処理手段と、を備えるパノラマ画像撮影装置。 The panoramic image photographing device according to claim 1,
The template processing means recognizes positions of the plurality of partial cross-sectional images in the panoramic image, and displays the plurality of partial cross-sectional images according to the positions recognized by the position recognition means. A panorama image photographing apparatus comprising: an attaching processing unit that automatically attaches to the attaching area of the image processing apparatus.
前記テンプレート処理手段は、前記テンプレートの前記複数の貼付け領域と当該複数の貼付け領域に貼り付けられる前記複数の部分断面像との予め定めた対応情報を記憶した記憶手段と、この記憶手段が記憶している対応情報に応じて前記複数の部分断面像を前記テンプレートの前記複数の貼付け領域に自動的に貼り付ける処理を行う貼付け処理手段と、を備えるパノラマ画像撮影装置。 The panoramic image photographing device according to claim 1,
The template processing means stores storage means storing predetermined correspondence information between the plurality of pasting areas of the template and the plurality of partial cross-sectional images pasted to the plurality of pasting areas, and the storage means stores the information. A panoramic image photographing apparatus comprising: a pasting processing unit configured to automatically paste the plurality of partial cross-sectional images to the plurality of pasting regions of the template according to corresponding correspondence information.
口内X線撮影装置で撮影された画像を、前記部分断面像生成手段により生成される複数の部分断面像と同等に扱う画像として取り込む手段を備えるパノラマ画像撮影装置。 In the panoramic image photographing device according to any one of claims 1 to 4,
A panoramic image photographing apparatus comprising means for capturing an image photographed by an intraoral X-ray photographing apparatus as an image treated in the same manner as a plurality of partial sectional images generated by the partial sectional image generating means.
前記テンプレート処理手段は、前記複数の部分断面像のそれぞれの前記所望断層面からの空間的な姿勢のずれを認識する姿勢ずれ認識手段と、この姿勢ずれ認識手段により認識される姿勢のずれの情報を前記複数の部分断面像のそれぞれと共に表示する姿勢ずれ情報表示手段と、を備えるパノラマ画像撮影装置。 In the panoramic image photographing device according to any one of claims 1 to 4,
The template processing means includes posture deviation recognition means for recognizing a spatial posture deviation of each of the plurality of partial sectional images from the desired tomographic plane, and information on posture deviation recognized by the posture deviation recognition means. A panoramic image photographing apparatus comprising: a posture deviation information display unit configured to display the information together with each of the plurality of partial cross-sectional images.
前記姿勢ずれ認識手段は、前記複数の部分断面像のそれぞれについて前記所望断層面からの平行方向の位置のずれ、当該所望断層面に対する角度のずれ、及び、当該所望断層面からの当該部分断面像の形状面全体のずれのうちの、少なくとも何れか1つのずれの情報を認識する手段であるパノラマ画像撮影装置。 The panoramic image photographing device according to claim 6,
The posture deviation recognizing means is configured such that, for each of the plurality of partial sectional images, a positional deviation in a parallel direction from the desired tomographic plane, an angular deviation with respect to the desired tomographic plane, and the partial sectional image from the desired tomographic plane A panoramic image photographing apparatus which is means for recognizing information on at least one of the deviations of the entire shape surface.
前記部分断面像生成手段により生成された前記複数の部分断面像のうちの2つ以上の部分断面像の、前記所望断層面からの位置のずれを認識する位置ずれ認識手段と、
この位置ずれ認識手段により認識された位置のずれの情報から前記パノラマ画像の全体の焦点距離のずれを推定する焦点距離ずれ推定手段と、
この焦点距離ずれ推定手段により推定された焦点距離のずれの情報に基づいて当該ずれを修正した断層面のパノラマ画像を前記記憶手段に記憶してある前記フレームデータから生成するパノラマ画像再生成手段と、を備えるパノラマ画像撮影装置。 The panoramic image photographing device according to claim 1,
A positional deviation recognizing means for recognizing a positional deviation of two or more partial sectional images of the plurality of partial sectional images generated by the partial sectional image generating means from the desired tomographic plane;
A focal length deviation estimation means for estimating a deviation of the overall focal length of the panoramic image from information on the positional deviation recognized by the positional deviation recognition means;
Panorama image regenerating means for generating a panoramic image of a tomographic plane in which the deviation is corrected based on information on the focal length deviation estimated by the focal distance deviation estimating means from the frame data stored in the storage means; A panoramic image photographing device.
前記パノラマ画像のデータから、前記所望断層面のパノラマ画像のうちの指定された複数の部分領域それぞれの、前記移動駆動手段によって前記X線源及び前記検出器が移動される空間上の位置に応じた最適焦点の部分断面像を生成し、
前記対象物の撮影部位の属性に関連付けて2次元的に所定のフォーマットで配置された複数の貼付け領域から成るテンプレートの当該複数の貼付け領域に前記複数の部分断面像を貼り付けて表示及び保存する、ことを特徴とするパノラマ画像撮影装置の画像処理方法。 A pair of an X-ray source that emits X-rays and a detector that outputs a digital signal corresponding to the incident X-rays at a constant frame rate in a state of facing each other with an object interposed therebetween An electric signal output by the detector at a predetermined frame rate is sequentially stored as frame data by moving around the object, and a desired tomography designated in advance based on the stored frame data. In an image processing method of a panoramic image photographing device that generates a panoramic image of a plane,
Based on the panoramic image data, each of a plurality of designated partial areas of the panoramic image of the desired tomographic plane is in accordance with the position on the space where the X-ray source and the detector are moved by the movement driving means. A partial cross-sectional image of the optimal focus
The plurality of partial cross-sectional images are pasted and displayed and stored in the plurality of pasting regions of the template including a plurality of pasting regions that are two-dimensionally arranged in a predetermined format in association with the attribute of the imaging region of the object. An image processing method for a panoramic image photographing apparatus, characterized by:
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006273302A JP2008086659A (en) | 2006-10-04 | 2006-10-04 | Image processing method and panoramic image photographing device |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006273302A JP2008086659A (en) | 2006-10-04 | 2006-10-04 | Image processing method and panoramic image photographing device |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2008086659A true JP2008086659A (en) | 2008-04-17 |
| JP2008086659A5 JP2008086659A5 (en) | 2009-12-10 |
Family
ID=39371430
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006273302A Pending JP2008086659A (en) | 2006-10-04 | 2006-10-04 | Image processing method and panoramic image photographing device |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2008086659A (en) |
Cited By (22)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010011910A (en) * | 2008-07-01 | 2010-01-21 | Yoshida Dental Mfg Co Ltd | Digital panoramic imaging apparatus and panoramic image processing program |
| JP2010046360A (en) * | 2008-08-22 | 2010-03-04 | Morita Mfg Co Ltd | X-ray image display method and radiography apparatus |
| JP2010051349A (en) * | 2008-08-26 | 2010-03-11 | Hitachi Medical Computer Systems Inc | Medical image diagnosis supporting apparatus and medical image diagnosis supporting program |
| WO2011013771A1 (en) * | 2009-07-30 | 2011-02-03 | 株式会社テレシステムズ | Radiation image pickup device and image pickup method by radiation |
| WO2011037202A1 (en) * | 2009-09-24 | 2011-03-31 | 株式会社アイキャット | Two-dimensional image display device |
| JP2011083499A (en) * | 2009-10-17 | 2011-04-28 | Tele Systems:Kk | Radiation imaging apparatus, and phantom device used therein |
| JP2011251119A (en) * | 2010-05-13 | 2011-12-15 | Carestream Health Inc | Method and system for computed radiography |
| KR101146862B1 (en) | 2010-12-02 | 2012-05-16 | 이준호 | Method to change from two-dimensional panorama picture to three-dimensional picture and the recorded media thereof |
| JP2013116318A (en) * | 2011-11-02 | 2013-06-13 | Morita Mfg Co Ltd | Panoramic tomography x-ray apparatus and image processing device |
| WO2013172676A1 (en) * | 2012-05-16 | 2013-11-21 | 주식회사 바텍 | Method and apparatus for providing panorama image data |
| JP2014226439A (en) * | 2013-05-24 | 2014-12-08 | 朝日レントゲン工業株式会社 | X-ray imaging apparatus |
| KR20150022826A (en) * | 2012-05-16 | 2015-03-04 | 주식회사바텍 | Apparatus and method for reconstruting X-ray panoramic image |
| JP5840738B1 (en) * | 2014-06-18 | 2016-01-06 | 株式会社モリタ製作所 | Display method, display device, and X-ray imaging apparatus |
| KR20160004890A (en) * | 2014-07-03 | 2016-01-13 | 이화여자대학교 산학협력단 | Method of measuring subcutaneous fat by chest computed tomography |
| KR20180042782A (en) * | 2016-10-18 | 2018-04-26 | 주식회사바텍 | Panoramic X-ray Image Processing Apparatus |
| US9993217B2 (en) | 2014-11-17 | 2018-06-12 | Vatech Co., Ltd. | Producing panoramic radiograph |
| US10674971B2 (en) | 2016-10-18 | 2020-06-09 | Vatech Co., Ltd. | X-ray image display apparatus and method for X-ray image display |
| EP3685752A1 (en) * | 2019-01-23 | 2020-07-29 | DENTSPLY SIRONA Inc. | Method and apparatus for generating a 2d panoramic image |
| CN111833244A (en) * | 2019-04-11 | 2020-10-27 | 深圳市深图医学影像设备有限公司 | Dental panoramic image generation method and device and computer readable storage medium |
| US10861150B2 (en) | 2016-10-18 | 2020-12-08 | Vatech Co., Ltd. | Producing panoramic radiograph |
| KR20210138324A (en) * | 2020-05-12 | 2021-11-19 | 주식회사 에이치디엑스윌 | Panoramic x-ray image display apparatus and method |
| KR20230022614A (en) * | 2021-08-09 | 2023-02-16 | 오스템임플란트 주식회사 | Method, device and recording medium for obtaining panoramic images of a plurality of teeth |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04144548A (en) * | 1990-10-05 | 1992-05-19 | Morita Mfg Co Ltd | Digital panorama x-ray photographing device |
| JPH04144549A (en) * | 1990-10-05 | 1992-05-19 | Morita Mfg Co Ltd | Digital panorama x-ray photographing device |
| US5179579A (en) * | 1991-06-17 | 1993-01-12 | Board Of Regents, The University Of Texas System | Radiograph display system with anatomical icon for selecting digitized stored images |
| JP2001333898A (en) * | 2000-05-26 | 2001-12-04 | Morita Mfg Co Ltd | Method of displaying x-ray image including dental, gnathic, and facial area, displaying device, and storing medium with stored program to carry out displaying method |
| JP2004313576A (en) * | 2003-04-18 | 2004-11-11 | Asahi Roentgen Kogyo Kk | Position correction processing method for panoramic tomogram, device with position correction processing function, and recording medium for computer processing equipped with position correction processing program |
-
2006
- 2006-10-04 JP JP2006273302A patent/JP2008086659A/en active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04144548A (en) * | 1990-10-05 | 1992-05-19 | Morita Mfg Co Ltd | Digital panorama x-ray photographing device |
| JPH04144549A (en) * | 1990-10-05 | 1992-05-19 | Morita Mfg Co Ltd | Digital panorama x-ray photographing device |
| US5179579A (en) * | 1991-06-17 | 1993-01-12 | Board Of Regents, The University Of Texas System | Radiograph display system with anatomical icon for selecting digitized stored images |
| JP2001333898A (en) * | 2000-05-26 | 2001-12-04 | Morita Mfg Co Ltd | Method of displaying x-ray image including dental, gnathic, and facial area, displaying device, and storing medium with stored program to carry out displaying method |
| JP2004313576A (en) * | 2003-04-18 | 2004-11-11 | Asahi Roentgen Kogyo Kk | Position correction processing method for panoramic tomogram, device with position correction processing function, and recording medium for computer processing equipped with position correction processing program |
Cited By (42)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010011910A (en) * | 2008-07-01 | 2010-01-21 | Yoshida Dental Mfg Co Ltd | Digital panoramic imaging apparatus and panoramic image processing program |
| JP2010046360A (en) * | 2008-08-22 | 2010-03-04 | Morita Mfg Co Ltd | X-ray image display method and radiography apparatus |
| JP2010051349A (en) * | 2008-08-26 | 2010-03-11 | Hitachi Medical Computer Systems Inc | Medical image diagnosis supporting apparatus and medical image diagnosis supporting program |
| US9629590B2 (en) | 2009-07-30 | 2017-04-25 | Takara Telesystems Corp. | Radiation imaging apparatus and imaging method using radiation |
| WO2011013771A1 (en) * | 2009-07-30 | 2011-02-03 | 株式会社テレシステムズ | Radiation image pickup device and image pickup method by radiation |
| JP5731386B2 (en) * | 2009-07-30 | 2015-06-10 | 株式会社テレシステムズ | Radiation imaging apparatus and imaging method using radiation |
| US9113799B2 (en) | 2009-07-30 | 2015-08-25 | Telesystems Co., Ltd. | Radiation imaging apparatus and imaging method using radiation |
| WO2011037202A1 (en) * | 2009-09-24 | 2011-03-31 | 株式会社アイキャット | Two-dimensional image display device |
| JP2011067302A (en) * | 2009-09-24 | 2011-04-07 | Icat:Kk | Two-dimensional image display device |
| JP2011083499A (en) * | 2009-10-17 | 2011-04-28 | Tele Systems:Kk | Radiation imaging apparatus, and phantom device used therein |
| US9245161B2 (en) | 2010-05-13 | 2016-01-26 | Carestream Health, Inc. | Method and system for computed radiography using a radio frequency identification device |
| JP2011251119A (en) * | 2010-05-13 | 2011-12-15 | Carestream Health Inc | Method and system for computed radiography |
| KR101146862B1 (en) | 2010-12-02 | 2012-05-16 | 이준호 | Method to change from two-dimensional panorama picture to three-dimensional picture and the recorded media thereof |
| JP2013116318A (en) * | 2011-11-02 | 2013-06-13 | Morita Mfg Co Ltd | Panoramic tomography x-ray apparatus and image processing device |
| US9486174B2 (en) | 2012-05-16 | 2016-11-08 | Vatech Co., Ltd. | Apparatus and method for reconstructing panoramic X-ray image |
| KR20150022826A (en) * | 2012-05-16 | 2015-03-04 | 주식회사바텍 | Apparatus and method for reconstruting X-ray panoramic image |
| KR101664166B1 (en) | 2012-05-16 | 2016-10-10 | 주식회사바텍 | Apparatus and method for reconstruting X-ray panoramic image |
| KR101389841B1 (en) | 2012-05-16 | 2014-04-29 | 주식회사바텍 | Panorama image data providing method and apparatus |
| US9514516B2 (en) | 2012-05-16 | 2016-12-06 | Vatech Co., Ltd. | Method and apparatus for providing panorama image data |
| WO2013172676A1 (en) * | 2012-05-16 | 2013-11-21 | 주식회사 바텍 | Method and apparatus for providing panorama image data |
| US9763637B2 (en) | 2012-05-16 | 2017-09-19 | Vatech Co., Ltd. | Apparatus and method for reconstructing panoramic X-ray image |
| US9852525B2 (en) | 2012-05-16 | 2017-12-26 | Vatech Co., Ltd. | Method and apparatus for providing panorama image data |
| US10181206B2 (en) | 2012-05-16 | 2019-01-15 | Vatech Co., Ltd. | Method and apparatus for providing panorama image data |
| JP2014226439A (en) * | 2013-05-24 | 2014-12-08 | 朝日レントゲン工業株式会社 | X-ray imaging apparatus |
| JP5840738B1 (en) * | 2014-06-18 | 2016-01-06 | 株式会社モリタ製作所 | Display method, display device, and X-ray imaging apparatus |
| KR20160004890A (en) * | 2014-07-03 | 2016-01-13 | 이화여자대학교 산학협력단 | Method of measuring subcutaneous fat by chest computed tomography |
| KR101700485B1 (en) | 2014-07-03 | 2017-01-26 | 이화여자대학교 산학협력단 | Method of measuring subcutaneous fat by chest computed tomography |
| US9993217B2 (en) | 2014-11-17 | 2018-06-12 | Vatech Co., Ltd. | Producing panoramic radiograph |
| US11373297B2 (en) | 2016-10-18 | 2022-06-28 | Vatech Co., Ltd. | Producing panoramic radiograph |
| KR102079576B1 (en) * | 2016-10-18 | 2020-02-20 | 주식회사 바텍 | Panoramic X-ray Imaging Apparatus And Method Thereof |
| US10674971B2 (en) | 2016-10-18 | 2020-06-09 | Vatech Co., Ltd. | X-ray image display apparatus and method for X-ray image display |
| US11783482B2 (en) | 2016-10-18 | 2023-10-10 | Vatech Co., Ltd. | Producing panoramic radiograph |
| KR20180042782A (en) * | 2016-10-18 | 2018-04-26 | 주식회사바텍 | Panoramic X-ray Image Processing Apparatus |
| US10861150B2 (en) | 2016-10-18 | 2020-12-08 | Vatech Co., Ltd. | Producing panoramic radiograph |
| WO2020152278A1 (en) * | 2019-01-23 | 2020-07-30 | Dentsply Sirona Inc. | Method and apparatus for generating a 2d panoramic image |
| EP3685752A1 (en) * | 2019-01-23 | 2020-07-29 | DENTSPLY SIRONA Inc. | Method and apparatus for generating a 2d panoramic image |
| CN111833244A (en) * | 2019-04-11 | 2020-10-27 | 深圳市深图医学影像设备有限公司 | Dental panoramic image generation method and device and computer readable storage medium |
| CN111833244B (en) * | 2019-04-11 | 2024-06-11 | 深圳市深图医学影像设备有限公司 | Dental panoramic image generation method and device and computer readable storage medium |
| KR20210138324A (en) * | 2020-05-12 | 2021-11-19 | 주식회사 에이치디엑스윌 | Panoramic x-ray image display apparatus and method |
| KR102366018B1 (en) | 2020-05-12 | 2022-02-23 | 주식회사 에이치디엑스윌 | Panoramic x-ray image display apparatus and method |
| KR20230022614A (en) * | 2021-08-09 | 2023-02-16 | 오스템임플란트 주식회사 | Method, device and recording medium for obtaining panoramic images of a plurality of teeth |
| KR102551167B1 (en) | 2021-08-09 | 2023-07-05 | 오스템임플란트 주식회사 | Method, device and recording medium for obtaining panoramic images of a plurality of teeth |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2008086659A (en) | Image processing method and panoramic image photographing device | |
| JP4844886B2 (en) | Panoramic image photographing apparatus and panoramic image photographing method | |
| US20230371804A1 (en) | Dental imaging with photon-counting detector | |
| JP5878121B2 (en) | X-ray tomography system | |
| JP7382042B2 (en) | Fixed intraoral tomosynthesis imaging system, method, and computer-readable medium for three-dimensional dental imaging | |
| JP4997635B2 (en) | Panoramic image photographing apparatus and image processing method in panoramic photographing | |
| JP4015366B2 (en) | Local irradiation X-ray CT imaging method and apparatus | |
| JP6437914B2 (en) | Panorama image photographing apparatus and image diagnostic method used in the apparatus | |
| JP6007386B2 (en) | Data processing device for radiation imaging | |
| WO2007046458A1 (en) | Panoramic image capturing device and image processing method for panoramic image capturing | |
| EP2609864B1 (en) | A single sensor multi-functional dental extra-oral x-ray imaging system and method | |
| JP5696305B2 (en) | Radiation imaging apparatus and imaging method using radiation | |
| US20160317107A1 (en) | Digital tomosynthesis systems, methods, and computer readable media for intraoral dental tomosynthesis imaging | |
| US20150004558A1 (en) | Dental imaging with photon-counting detector | |
| JP5805688B2 (en) | Medical X-ray equipment | |
| US20170319160A1 (en) | Stationary intraoral tomosynthesis imaging systems, methods, and computer readable media for three dimensional dental imaging | |
| JPWO2002028285A1 (en) | Medical X-ray CT image display method, display device, medical X-ray CT device, and recording medium storing a program for implementing the display method | |
| JP5944012B2 (en) | Dental imaging with a photon count detector | |
| JP6040502B2 (en) | Dental X-ray equipment | |
| JP5830753B2 (en) | X-ray CT imaging apparatus and X-ray CT image display method | |
| US20220361830A1 (en) | Method and a system for obtaining operating parameters for x ray data acquisition | |
| JP5618292B2 (en) | X-ray CT imaging apparatus and X-ray CT image display method | |
| JP7022404B2 (en) | X-ray imaging device and image processing method in X-ray imaging | |
| JP5528052B2 (en) | Radiation imaging apparatus and phantom device used in the same |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090930 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20090930 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20101130 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20110915 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20110927 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20111128 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20120807 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20130212 |