JP2007257366A - Diagnostic device and diagnostic method - Google Patents
Diagnostic device and diagnostic method Download PDFInfo
- Publication number
- JP2007257366A JP2007257366A JP2006081628A JP2006081628A JP2007257366A JP 2007257366 A JP2007257366 A JP 2007257366A JP 2006081628 A JP2006081628 A JP 2006081628A JP 2006081628 A JP2006081628 A JP 2006081628A JP 2007257366 A JP2007257366 A JP 2007257366A
- Authority
- JP
- Japan
- Prior art keywords
- neuron
- abnormal
- similarity
- state
- neuron set
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images









Abstract
Description
本発明は、ニューラルネットワークの教師なし学習の手法を用いて、各種機械をはじめとする、動植物,微生物等の生命体、天候や天体の運動等の自然現象など種々の対象体の状態を診断するための診断装置及び診断方法に関し、特に、油圧ショベル等の作業機械に生じる異常状態を診断するのに用いて好適な診断装置及び診断方法に関する。 The present invention uses an unsupervised learning technique of a neural network to diagnose the state of various objects such as various machines, life forms such as animals and plants, microorganisms, and natural phenomena such as weather and celestial motion. In particular, the present invention relates to a diagnostic apparatus and a diagnostic method suitable for use in diagnosing an abnormal state occurring in a work machine such as a hydraulic excavator.
従来の機械類のメンテナンスでは、機械類に故障が発生してから修復する事後保全や、機械類の使用時間を基準にした画一的な予防保全が一般に行われている。事後保全では、修理に大幅な時間やコストがかかってしまい、また、予防保全では、画一的な処理のため、不必要な部品やオイルの廃棄が発生し顧客の費用負担が増大し、また、労働集約型からくる高コスト化という問題があったが、今後はこうした従来のメンテナンスから脱却して、予知保全への転換を図っていく必要がある。 In conventional maintenance of machinery, post-maintenance that is repaired after a failure occurs in the machinery and uniform preventive maintenance based on the usage time of the machinery are generally performed. Subsequent maintenance takes a significant amount of time and cost for repairs.In preventive maintenance, because of uniform processing, unnecessary parts and oil are discarded, increasing the cost burden on customers. However, there has been a problem of increased costs due to labor-intensive types, but in the future it will be necessary to move away from such conventional maintenance and switch to predictive maintenance.
予知保全とは、稼動時の負荷・環境情報、過去のメンテナンス歴データベース、故障物理の理解などから、推論により健全度を診断して劣化・余寿命を予測することで、機械の異常を早期に発見して安全な動作環境を提供するものである。
例えば、特許文献1には、バッチプラントや連続系プラント等の固定機械設備の異常検出装置に関し、自己組織化モデルを用いて対象プラントの異常を検出する技術が開示されている。すなわち、対象プラントが正常状態であるときの正常データを予め収集しておき、この正常データをもとに自己組織化マップ(Self-Organizing Map)を用いて正常データの特徴を抽出するとともに、これをもとに自己組織化マップの出力層における各出力ユニット間の距離関係を表す特徴マップを形成して正常状態モデルとして記憶しておき、この正常状態モデルと未知の入力データ(入力ベクトル)とに基づいて対象プラントの異常を検出するものである。
Predictive maintenance means early diagnosis of machine abnormalities by diagnosing soundness and predicting deterioration and remaining life from inference based on load / environment information during operation, past maintenance history database, understanding of failure physics, etc. Discover and provide a safe operating environment.
For example,
自己組織化マップとは、複雑な多次元変数の持つ特徴を保持させたままその変数の次元を削減することを目的として適用される自己組織化モデルの一つである。例えば、特許文献1に記載の技術では、正常状態モデルが、多次元データである正常データを可視化して2次元マップに変換したものとして異常検出装置の内部に記憶されている。そして、未知の入力データと正常状態モデルとを対比して同等の特徴を有するとみなされる場合に、入力データが正常データであると判断する。このような構成により、多次元の入力データに関する総合的な異常検知をリアルタイムに実現することができる。
The self-organizing map is one of self-organizing models applied for the purpose of reducing the dimension of a variable while retaining the characteristics of a complex multidimensional variable. For example, in the technique described in
しかし、この技術では、入力データが正常データであるか否かの判定にかかる正常状態モデルが一つしかないため、例えば、機械の運転モードが多数存在するような場合には適用が難しい。すなわち、一つの2次元自己組織化マップ内にこれらの運転モード数と略同数のクラスタが形成されることになるため、各クラスタの面積が小さくなっていき隣接するクラスタとのオーバーラップが強くなり境界が不明確になってしまう。 However, since this technique has only one normal state model for determining whether or not the input data is normal data, it is difficult to apply, for example, when there are many operation modes of the machine. In other words, since approximately the same number of clusters as these operation modes are formed in one two-dimensional self-organizing map, the area of each cluster becomes smaller and the overlap with adjacent clusters becomes stronger. The boundary will be unclear.
このように、特許文献1に記載の技術は、正常状態モデルの特徴が複数存在する機械に対して、正確な診断を行うことができない。また、どの計測データ、即ちどのパラメータにどの程度の劣化や異常の兆候が生じているのかを予測することまでは困難である。
上記のような課題に対し、特許文献2には、複数の運転動作(運転モード)で動作しうる機械等の対象体の各動作を判定する技術であって、それぞれの運転モード毎に、個別の分離モデルとしての自己組織化マップを形成したものが開示されている。
As described above, the technique described in
In order to solve the above-described problems,
例えば、油圧ショベル等の作業機械の場合、「バケットで土砂をすくい始めてからすくい終わるまでの動作(運転モード1)」、「土砂をすくった後、車体を旋回させて、土砂を保持したバケットをトラックのベッセルの上方まで運ぶ動作(運転モード2)」、「バケットを開いて土砂のベッセル上への移載を開始してから土砂の移載が完了するまでの動作(運転モード3)」、「バケットを堆積した土砂の位置まで戻して運転モード1に入るまでの動作(運転モード4)」といった4つの運転モードを想定しておく。一方、作業機械から検出されるエンジンの回転数,油圧ポンプの吐出圧,油圧回路内の油温,車体の前進・後進・旋回を制御する作動圧,バケットを制御するバケットシリンダの作動圧,スティックを制御するスティックシリンダの作動圧,ブームを制御するブームシリンダの作動圧等のパラメータのうち、同時刻に検出されたものをまとめて一つの多次元パラメータとして扱い、各運転モードに対応する多次元パラメータの自己組織化マップを個別に形成しておく。このような構成により、作業機械の各動作モードを正確に認識することができ、あるいは、各モードの何れにも当てはまらない場合には、未知モード,異常モードであることを確認することができる。
しかしながら、特許文献2に記載の技術では、「正常ではない」ことを以て未知又は異常であると判定しているに過ぎず、その異常がいかなる内容の異常であるかを診断することはできない。例えば、作業機械の動作モードの判定結果が運転モード1〜4の何れにも当てはまらない場合、少なくとも「正常ではない」ことは把握できても、具体的にどのような措置を取るべきかを判断することができず、その結果、従来のメンテナンスと同様に画一的な予防保全措置を取らざるを得ない。
However, the technique described in
このように、従来の技術によれば、劣化や異常を予測することはできても、劣化や異常の種類までは予測することができず、予知保全の観点からより正確な状態判定が望まれている。
本発明は、このような課題に鑑みてなされたもので、対象体の状態をより正確に診断できるようにした、診断装置及び診断方法を提供することを目的とする。
As described above, according to the conventional technology, although deterioration and abnormality can be predicted, the type of deterioration and abnormality cannot be predicted, and more accurate state determination is desired from the viewpoint of predictive maintenance. ing.
The present invention has been made in view of such a problem, and an object of the present invention is to provide a diagnostic apparatus and a diagnostic method that can more accurately diagnose the state of an object.
上記目的を達成するため、請求項1記載の本発明の診断装置は、対象体の状態を診断するための診断装置であって、該対象体の該状態に応じて変動する複数のパラメータからなるデータを検出する検出手段と、正常状態にある該対象体から該検出手段によって検出された複数の該データをデータセットとして、ニューラルネットワークの教師なし学習により圧縮した正常ニューロンセットを記憶する正常ニューロンセット記憶手段と、異常状態にある該対象体から該検出手段によって検出された複数の該データをデータセットとして、ニューラルネットワークの教師なし学習により圧縮した異常ニューロンセットを、該異常状態の種類とともに複数組記憶する異常ニューロンセット記憶手段と、該対象体の該状態が未確定であるときに該検出手段によって検出される複数の該データを実データセットとして、該実データセットと該正常ニューロンセット記憶手段に記憶された該正常ニューロンセットとに基づいて、該対象体が正常状態にあるか否かを判定するとともに、該実データセットと該異常ニューロンセット記憶手段に記憶された該異常ニューロンセットとに基づいて、該対象体における該異常状態の種類を診断する診断手段とを備えたことを特徴としている。
In order to achieve the above object, a diagnostic apparatus according to
請求項2記載の本発明の診断装置は、請求項1記載の診断装置において、該診断手段が、該実データセットと該異常ニューロンセットとのユークリッド距離が小さいほど、該実データセットの該異常ニューロンセットに対する類似度が高いと判定する類似度判定手段と、該類似度判定手段により該実データセットとの類似度が最も高いと判定された異常ニューロンセットを選択する類似ニューロンセット選択手段と、該対象体における該異常状態を、該類似ニューロンセット選択手段で選択された該異常ニューロンセットに対応する種類の該異常状態であると診断する状態診断手段とを有することを特徴としている。
The diagnostic device of the present invention according to
また、請求項3記載の本発明の診断装置は、請求項1記載の診断装置において、該対象体の該状態が未確定であるときに該検出手段で検出される複数の該データを実データセットとして、ニューラルネットワークの教師なし学習により実ニューロンセットへと圧縮する圧縮手段を備え、該診断手段が、該圧縮手段で圧縮された実ニューロンセットと該異常ニューロンセットとのユークリッド距離が小さいほど、該実ニューロンセットの該異常ニューロンセットに対する類似度が高いと判定する類似度判定手段と、該類似度判定手段により類似度が最も高いと判定された異常ニューロンセットを選択する類似ニューロンセット選択手段と、該対象体における該異常状態を、該類似ニューロンセット選択手段で選択された該異常ニューロンセットに対応する種類の該異常状態であると診断する状態診断手段とを有することを特徴としている。 According to a third aspect of the present invention, there is provided the diagnostic device according to the first aspect, wherein the plurality of data detected by the detecting means when the state of the object is uncertain is actual data. As a set, comprising compression means for compressing into a real neuron set by unsupervised learning of a neural network, the diagnostic means, the smaller the Euclidean distance between the real neuron set compressed by the compression means and the abnormal neuron set, Similarity determination means for determining that the similarity of the real neuron set to the abnormal neuron set is high, and similar neuron set selection means for selecting the abnormal neuron set determined to be the highest by the similarity determination means The abnormal neuron set selected by the similar neuron set selection means as the abnormal state in the object Is characterized by having a condition diagnosis means for diagnosing that the the abnormal state of the corresponding type.
また、請求項2記載の診断装置において、該類似度判定手段が、該実データセットを構成する各データと該異常ニューロンセットを構成する各ニューロンとの間のユークリッド距離の平均値を演算して該類似度を判定することが好ましい(請求項4)。
また、請求項2記載の診断装置において、該異常ニューロンセット記憶手段が、該異常ニューロンセットへの圧縮時に各ニューロン毎のウェイトを演算するとともに、該類似度判定手段が、該実データセットを構成する各データと該異常ニューロンセットを構成する各ニューロンとの間のユークリッド距離の平均値及び該ウェイトに基づいて該類似度を判定することが好ましい(請求項5)。
3. The diagnostic apparatus according to
3. The diagnostic apparatus according to
また、請求項2記載の診断装置において、該類似度判定手段が、該実データセットを構成する各データと該異常ニューロンセットを構成する各ニューロンとの間の最小ユークリッド距離の平均値を演算して該類似度を判定することが好ましい(請求項6)。
また、請求項2記載の診断装置において、該異常ニューロンセット記憶手段が、該異常ニューロンセットへの圧縮時に各ニューロン毎のウェイトを演算するとともに、該類似度判定手段が、該実データセットを構成する各データと該異常ニューロンセットを構成する各ニューロンとの間の最小ユークリッド距離の平均値及び該ウェイトに基づいて該類似度を判定することが好ましい(請求項7)。
3. The diagnostic apparatus according to
3. The diagnostic apparatus according to
また、請求項2記載の診断装置において、該類似度判定手段が、該実データセットの重心と該異常ニューロンセットの重心とのユークリッド距離を演算して該類似度を判定することが好ましい(請求項8)。
また、請求項3記載の診断装置において、該類似度判定手段が、該実ニューロンセットを構成する各ニューロンと異常ニューロンセットを構成する各ニューロンとの全てのペアのユークリッド距離の平均値を演算して該類似度を判定することが好ましい(請求項9)。
Further, in the diagnosis apparatus according to
The diagnostic apparatus according to
また、請求項3記載の診断装置において、該圧縮手段が、該実ニューロンセットへの圧縮時に各ニューロン毎の第1ウェイトを演算し、該異常ニューロンセット記憶手段が、該異常ニューロンセットへの圧縮時に各ニューロン毎の第2ウェイトを演算するとともに、該類似度判定手段が、該実ニューロンセットを構成する各ニューロンと異常ニューロンセットを構成する各ニューロンとの全てのペアのユークリッド距離の平均値,該第1ウェイト及び該第2ウェイトに基づいて該類似度を判定することが好ましい(請求項10)。
4. The diagnostic apparatus according to
また、請求項3記載の診断装置において、該類似度判定手段が、該実ニューロンセットを構成する各ニューロンから該異常ニューロンセットを構成する各ニューロンまでの最小ユークリッド距離の平均値を演算して該類似度を判定することが好ましい(請求項11)。
また、請求項3記載の診断装置において、該圧縮手段が、該実ニューロンセットへの圧縮時に各ニューロン毎の第1ウェイトを演算するとともに、該類似度判定手段が、該実ニューロンセットを構成する各ニューロンから該異常ニューロンセットを構成する各ニューロンまでの最小ユークリッド距離の平均値及び該第1ウェイトに基づいて該類似度を判定することが好ましい(請求項12)。
The diagnostic apparatus according to
The diagnostic device according to
また、請求項3記載の診断装置において、該圧縮手段が、該実ニューロンセットへの圧縮時に各ニューロン毎の第1ウェイトを演算し、該異常ニューロンセット記憶手段が、該異常ニューロンセットへの圧縮時に各ニューロン毎の第2ウェイトとを演算するとともに、該類似度判定手段が、該実ニューロンセットを構成する各ニューロンから該異常ニューロンセットを構成する各ニューロンまでの最小ユークリッド距離の平均値,該第1ウェイト及び該第2ウェイトに基づいて該類似度を判定することが好ましい(請求項13)。
4. The diagnostic apparatus according to
また、請求項3記載の診断装置において、該類似度判定手段が、該実ニューロンセットの重心と該異常ニューロンセットの重心とのユークリッド距離を演算して該類似度を判定することが好ましい(請求項14)。
請求項15記載の本発明の診断装置は、請求項2又は3記載の診断装置において、該診断手段が、該類似度判定手段における該類似度の判定に際し、複数の異なる演算方法を設定する類似度演算方法設定手段を有し、該類似ニューロンセット選択手段が、該類似度演算方法設定手段で設定された該複数の異なる演算方法毎に、最も類似度の高い異常ニューロンセットを選択するとともに、該状態診断手段が、該対象体における該異常状態を、該類似ニューロンセット選択手段における選択回数の最も多い該異常ニューロンセットに対応する種類の該異常状態であると診断することを特徴としている。
Further, in the diagnosis apparatus according to
The diagnostic device of the present invention according to
また、請求項1〜15の何れか1項に記載の診断装置において、該異常ニューロンセット記憶手段が、該実データセットを用いて該異常ニューロンセットを更新又は変更することが好ましい(請求項16)。
この場合、該実データセットに対応する該対象体の該状態が未知の異常状態にあるか否かを判定する未知異常状態判定手段を備え、該異常ニューロンセット記憶手段が、該未知異常状態判定手段において判定された該未知の異常状態に対応する該実データセットをニューラルネットワークの教師なし学習により圧縮した未知異常ニューロンセットを、該未知の異常状態の種類とともに新たに記憶することが好ましい(請求項17)。
The diagnostic device according to any one of
In this case, it comprises an unknown abnormal state determination means for determining whether or not the state of the object corresponding to the actual data set is in an unknown abnormal state, and the abnormal neuron set storage means includes the unknown abnormal state determination Preferably, an unknown abnormal neuron set obtained by compressing the actual data set corresponding to the unknown abnormal state determined by the means by unsupervised learning of a neural network is newly stored together with the type of the unknown abnormal state (claim). Item 17).
さらにこの場合、該未知異常状態判定手段が、該実データセットと該異常ニューロンセットとのユークリッド距離に基づいて、該対象体が未知の異常状態にあるか否かを判定することが好ましい(請求項18)。
請求項19記載の本発明の診断方法は、対象体の状態を診断するための診断方法であって、正常状態にある該対象体から、該対象体の該状態に応じて変動する複数のパラメータからなるデータを検出するとともに、複数の該データを正常データセットとして検出する正常データセット検出ステップと、該正常データセットをニューラルネットワークの教師なし学習により圧縮した正常ニューロンセットを記憶する正常ニューロンセット記憶ステップと、異常状態にある該対象体から、該複数のパラメータからなるデータを検出するとともに、複数の該データを異常データセットとして複数組検出する異常データセット検出ステップと、複数組の該異常データセットをニューラルネットワークの教師なし学習により圧縮した異常ニューロンセットを、該異常状態の種類とともに複数組記憶する異常ニューロンセット記憶ステップと、該対象体の該状態が未確定であるときに、該複数のパラメータからなるデータを検出するとともに、複数の該データを実データセットとして検出する実データセット検出ステップと、該実データセットと該正常ニューロンセットとに基づいて、該対象体が正常状態にあるか否かを判定する正常状態判定ステップと、該実データセットと該異常ニューロンセットとに基づいて、該対象体における該異常状態の種類を診断する診断ステップとを備えたことを特徴としている。
Furthermore, in this case, it is preferable that the unknown abnormal state determination means determines whether or not the object is in an unknown abnormal state based on the Euclidean distance between the actual data set and the abnormal neuron set (claim) Item 18).
The diagnostic method of the present invention according to claim 19 is a diagnostic method for diagnosing a state of a target object, wherein a plurality of parameters that vary from the target object in a normal state according to the state of the target object And a normal neuron set memory for storing a normal neuron set obtained by compressing the normal data set by unsupervised learning of a neural network. An abnormal data set detecting step for detecting a plurality of sets of the data as an abnormal data set, and detecting a plurality of sets of the data as an abnormal data set from the object in an abnormal state; and a plurality of sets of the abnormal data Abnormal neuron set compressed by unsupervised learning of neural network An abnormal neuron set storage step for storing a plurality of sets together with the type of the abnormal state, and when the state of the object is uncertain, detecting data consisting of the plurality of parameters, A real data set detecting step for detecting as a real data set, a normal state determining step for determining whether or not the object is in a normal state based on the real data set and the normal neuron set, and the real data And a diagnostic step of diagnosing the type of the abnormal state in the object based on the set and the abnormal neuron set.
請求項20記載の本発明の診断方法は、請求項19記載の診断方法において、該診断ステップが、該実データセットと該異常ニューロンセットとの距離が小さいほど、該実データセットの該異常ニューロンセットに対する類似度が高いと判定する類似度判定ステップと、該類似度判定ステップにおいて、該実データセットとの類似度が最も高いと判定された異常ニューロンセットを選択する類似ニューロンセット選択ステップと、該対象体における該異常状態を、該類似ニューロンセット選択ステップで選択された該異常ニューロンセットに対応する種類の該異常状態であると診断する状態診断ステップとからなることを特徴としている。
The diagnostic method of the present invention according to
請求項21記載の本発明の診断方法は、請求項19記載の診断方法において、該実データセットをニューラルネットワークの教師なし学習により実ニューロンセットへと圧縮する圧縮ステップを備え、該診断ステップが、該実ニューロンセットと該異常ニューロンセットとの距離が小さいほど、該実ニューロンセットの該異常ニューロンセットに対する類似度が高いと判定する類似度判定ステップと、該類似度判定ステップにおいて、該実ニューロンセットとの類似度が最も高いと判定された異常ニューロンセットを選択する類似ニューロンセット選択ステップと、該対象体における該異常状態を、該類似ニューロンセット選択ステップで選択された該異常ニューロンセットに対応する種類の該異常状態であると診断する状態診断ステップとからなることを特徴としている。 The diagnostic method of the present invention according to claim 21 is the diagnostic method according to claim 19, further comprising a compression step of compressing the real data set into a real neuron set by unsupervised learning of a neural network, the diagnostic step comprising: In the similarity determination step for determining that the similarity between the real neuron set and the abnormal neuron set is high as the distance between the real neuron set and the abnormal neuron set is high, in the similarity determination step, the real neuron set A similar neuron set selection step for selecting an abnormal neuron set determined to have the highest degree of similarity to and the abnormal state in the object corresponding to the abnormal neuron set selected in the similar neuron set selection step A state diagnosis step for diagnosing the abnormal state of the type; It is characterized in that Ranaru.
また、請求項20記載の診断方法における、該類似度判定ステップにおいて、該実データセットを構成する各データと該異常ニューロンセットを構成する各ニューロンとの間のユークリッド距離の平均値を演算して該類似度を判定することが好ましい(請求項22)。
また、請求項20記載の診断方法における、該異常ニューロンセット記憶ステップにおいて、該異常ニューロンセットへの圧縮時に各ニューロン毎のウェイトを演算し、該類似度判定ステップにおいて、該実データセットを構成する各データと該異常ニューロンセットを構成する各ニューロンとの間のユークリッド距離の平均値及び該ウェイトに基づいて該類似度を判定することが好ましい(請求項23)。
21. In the diagnosis method according to
21. The diagnostic method according to
また、請求項20記載の診断方法における、該類似度判定ステップにおいて、該実データセットを構成する各データと該異常ニューロンセットを構成する各ニューロンとの間の最小ユークリッド距離の平均値を演算して該類似度を判定することが好ましい(請求項24)。
また、請求項20記載の診断方法における、該異常ニューロンセット記憶ステップにおいて、該異常ニューロンセットへの圧縮時に各ニューロン毎のウェイトを演算し、該類似度判定ステップにおいて、該実データセットを構成する各データと該異常ニューロンセットを構成する各ニューロンとの間の最小ユークリッド距離の平均値及び該ウェイトに基づいて該類似度を判定することが好ましい(請求項25)。
21. In the diagnostic method according to
21. The diagnostic method according to
また、請求項20記載の診断方法における、該類似度判定ステップにおいて、該実データセットの重心と該異常ニューロンセットの重心とのユークリッド距離を演算して該類似度を判定することが好ましい(請求項26)。
また、請求項21記載の診断方法における、該類似度判定ステップにおいて、該実ニューロンセットを構成する各ニューロンと異常ニューロンセットを構成する各ニューロンとの全てのペアのユークリッド距離の平均値を演算して該類似度を判定することが好ましい(請求項27)。
In the diagnosis method according to
In the diagnosis method according to claim 21, in the similarity determination step, an average value of Euclidean distances of all pairs of each neuron constituting the real neuron set and each neuron constituting the abnormal neuron set is calculated. Thus, it is preferable to determine the similarity (claim 27).
また、請求項21記載の診断方法における、該圧縮ステップにおいて、該実ニューロンセットへの圧縮時に各ニューロン毎の第1ウェイトを演算し、該異常ニューロンセット記憶ステップにおいて、該異常ニューロンセットへの圧縮時に各ニューロン毎の第2ウェイトを演算し、該類似度判定ステップにおいて、該実ニューロンセットを構成する各ニューロンと異常ニューロンセットを構成する各ニューロンとの全てのペアのユークリッド距離の平均値,該第1ウェイト及び該第2ウェイトに基づいて該類似度を判定することが好ましい(請求項28)。 22. The diagnostic method according to claim 21, wherein in the compression step, a first weight for each neuron is calculated at the time of compression to the real neuron set, and compression to the abnormal neuron set is performed in the abnormal neuron set storage step. Sometimes calculating a second weight for each neuron, and in the similarity determination step, an average value of Euclidean distances of all pairs of each neuron constituting the real neuron set and each neuron constituting the abnormal neuron set, It is preferable to determine the similarity based on the first weight and the second weight.
また、請求項21記載の診断方法における、該類似度判定ステップにおいて、該実ニューロンセットを構成する各ニューロンから該異常ニューロンセットを構成する各ニューロンまでの最小ユークリッド距離の平均値を演算して該類似度を判定することが好ましい(請求項29)。
また、請求項21記載の診断方法における、該圧縮ステップにおいて、該実ニューロンセットへの圧縮時に各ニューロン毎の第1ウェイトを記憶し、該類似度判定ステップにおいて、該実ニューロンセットを構成する各ニューロンから該異常ニューロンセットを構成する各ニューロンまでの最小ユークリッド距離の平均値及び該第1ウェイトに基づいて該類似度を判定することが好ましい(請求項30)。
In the diagnosis method according to claim 21, in the similarity determination step, an average value of minimum Euclidean distances from each neuron constituting the real neuron set to each neuron constituting the abnormal neuron set is calculated, and It is preferable to determine the degree of similarity (claim 29).
Furthermore, in the diagnostic method according to claim 21, in the compression step, a first weight for each neuron is stored at the time of compression to the real neuron set, and each of the real neuron sets constituting the real neuron set is stored in the similarity determination step. It is preferable to determine the similarity based on an average value of minimum Euclidean distances from neurons to each neuron constituting the abnormal neuron set and the first weight (claim 30).
また、請求項21記載の診断方法における、該圧縮ステップにおいて、該実ニューロンセットへの圧縮時に各ニューロン毎の第1ウェイトを演算し、該異常データセット記憶ステップにおいて、該異常ニューロンセットへの圧縮時に各ニューロン毎の第2ウェイトを演算し、該類似度判定ステップにおいて、該実ニューロンセットを構成する各ニューロンから該異常ニューロンセットを構成する各ニューロンまでの最小ユークリッド距離の平均値,該第1ウェイト及び該第2ウェイトに基づいて該類似度を判定することが好ましい(請求項31)。 22. The diagnostic method according to claim 21, wherein in the compression step, a first weight for each neuron is calculated at the time of compression to the real neuron set, and compression to the abnormal neuron set is performed in the abnormal data set storage step. A second weight for each neuron is sometimes calculated, and in the similarity determination step, an average value of minimum Euclidean distances from each neuron constituting the real neuron set to each neuron constituting the abnormal neuron set, the first It is preferable to determine the similarity based on the weight and the second weight.
また、請求項21記載の診断方法における、該類似度判定ステップにおいて、該実ニューロンセットの重心と該異常ニューロンセットの重心とのユークリッド距離を演算して該類似度を判定することが好ましい(請求項32)。
請求項33記載の本発明の診断方法は、請求項20又は21記載の診断方法における、該類似度判定ステップにおいて、複数の異なる演算方法を設定することにより、該類似度の判定を複数回繰り返し、該類似ニューロンセット選択ステップにおいて、該実ニューロンセットとの類似度が最も高いと判定された異常ニューロンセットを複数回繰り返して選択し、該状態診断ステップにおいて、該対象体における該異常状態を、該類似ニューロンセット選択ステップでの選択回数の最も多い該異常ニューロンセットに対応する種類の該異常状態であると診断することを特徴としている。
In the diagnosis method according to claim 21, in the similarity determination step, it is preferable to determine the similarity by calculating a Euclidean distance between the center of gravity of the real neuron set and the center of gravity of the abnormal neuron set. Item 32).
A diagnostic method according to a thirty-third aspect of the present invention is the diagnostic method according to the twentieth or twenty-first aspect, wherein the similarity determination step is repeated a plurality of times by setting a plurality of different calculation methods in the similarity determination step. In the similar neuron set selection step, an abnormal neuron set determined to have the highest degree of similarity with the real neuron set is repeatedly selected several times, and in the state diagnosis step, the abnormal state in the object is selected. It is characterized by diagnosing the abnormal state of the type corresponding to the abnormal neuron set having the largest number of selections in the similar neuron set selection step.
また、請求項19〜33の何れか1項に記載の診断方法における、該異常ニューロンセット記憶ステップにおいて、該実データセットを用いて該異常ニューロンセットを更新又は変更することが好ましい(請求項34)。
この場合、該実データセットに対応する該対象体の該状態が未知の異常状態にあるか否かを判定する未知異常状態判定ステップを備え、該異常ニューロンセット記憶ステップにおいて、該未知異常状態判定ステップで判定された該未知の異常状態に対応する該実データセットをニューラルネットワークの教師なし学習により圧縮した未知異常ニューロンセットを、該未知の異常状態の種類とともに新たに記憶することが好ましい(請求項35)。
In the diagnostic method according to any one of claims 19 to 33, in the abnormal neuron set storage step, the abnormal neuron set is preferably updated or changed using the real data set (claim 34). ).
In this case, an unknown abnormal state determination step for determining whether or not the state of the object corresponding to the actual data set is in an unknown abnormal state is provided. In the abnormal neuron set storage step, the unknown abnormal state determination Preferably, an unknown abnormal neuron set obtained by compressing the actual data set corresponding to the unknown abnormal state determined in the step by unsupervised learning of a neural network is newly stored together with the type of the unknown abnormal state (claim). Item 35).
さらにこの場合、該未知異常状態判定ステップにおいて、該実データセットと該異常ニューロンセットとのユークリッド距離に基づいて、該対象体が未知の異常状態にあるか否かを判定することが好ましい(請求項36)。 Furthermore, in this case, it is preferable in the unknown abnormal state determination step to determine whether or not the object is in an unknown abnormal state based on the Euclidean distance between the actual data set and the abnormal neuron set. Item 36).
本発明の診断装置及び診断方法(請求項1,19)によれば、対象体が正常状態であるか否かを判定することができ、また、対象体が正常状態でない場合には、単に異常状態であることだけでなく、異常状態の種類を判定することができる。これにより、対象体の状態をより明確に予測することができ、予知保全が容易となる。
また、対象体の状態に応じて変動する複数のパラメータ全体を一つのデータとして扱っているため、例えば各パラメータを個別に判定するような手法と比較して総括的な判定が可能となる。
According to the diagnostic apparatus and diagnostic method of the present invention (
In addition, since all of a plurality of parameters that change in accordance with the state of the object are handled as one data, for example, a comprehensive determination can be made in comparison with a method in which each parameter is determined individually.
また、本発明の診断装置及び診断方法(請求項2,20)によれば、実データセットとニューロンセットとの距離から導かれる類似度に基づく判定により、対象体の状態を正確に診断することができる。また、検出手段で検出されたデータ群であるデータセットそのものの類似度が演算されるようになっているため、データの取得後直ちに(すなわちセミリアルタイムに)診断を行うことができる。これにより、例えば対象体の異常状態の早期発見が容易である。 According to the diagnostic apparatus and diagnostic method of the present invention (claims 2 and 20), the state of the object can be accurately diagnosed by determination based on the similarity derived from the distance between the actual data set and the neuron set. Can do. Further, since the similarity of the data set itself, which is a data group detected by the detection means, is calculated, diagnosis can be performed immediately after data acquisition (that is, semi-real time). Thereby, for example, early detection of an abnormal state of the object is easy.
また、本発明の診断装置及び診断方法(請求項3,21)によれば、ニューロンセット同士(すなわち、正常ニューロンセット,異常ニューロンセット及び実ニューロンセット)の距離から導かれる類似度に基づく判定により、対象体の稼働状態を正確に診断することができる。また、圧縮手段で圧縮された実ニューロンセットの類似度が演算されるようになっているため、類似度の演算量(診断負荷)を減少させることができ、診断速度を高めることが可能となる。 According to the diagnostic apparatus and diagnostic method of the present invention (claims 3 and 21), the determination is based on the similarity derived from the distance between the neuron sets (that is, the normal neuron set, abnormal neuron set, and real neuron set). The operating state of the object can be accurately diagnosed. Further, since the similarity of the real neuron set compressed by the compression means is calculated, the calculation amount (diagnosis load) of the similarity can be reduced, and the diagnosis speed can be increased. .
また、本発明の診断装置及び診断方法(請求項15,33)によれば、複数の演算方法に基づく合議判定により、判定結果の信頼性を高めることができる。
また、本発明の診断装置及び診断方法(請求項16,34)によれば、現在の知識ベースにはない新たな異常状態が生じた場合に、その異常状態を表すニューロンからなるモジュールを付け加えたり、古いモジュールを新しいものに置き換えたりすることが可能であり、診断精度をより向上させることができる。
Moreover, according to the diagnostic apparatus and diagnostic method of the present invention (claims 15 and 33), the reliability of the determination result can be increased by the consensus determination based on a plurality of calculation methods.
Further, according to the diagnostic apparatus and diagnostic method of the present invention (claims 16 and 34), when a new abnormal state that does not exist in the current knowledge base occurs, a module composed of neurons representing the abnormal state is added. It is possible to replace the old module with a new one, and the diagnostic accuracy can be further improved.
また、本発明の診断装置及び診断方法(請求項17,35)によれば、未確定な状態に対応する任意の実データセットを、未知の異常状態に対応する実データセットとして用いることにより、その実データセットに基づく新たな異常ニューロンセットを作成することができる。つまり、検出手段で検出された実際の未知の状態に対応するモジュールを知識ベースに追加することができる。 Further, according to the diagnostic apparatus and diagnostic method of the present invention (claims 17 and 35), by using an arbitrary actual data set corresponding to an uncertain state as an actual data set corresponding to an unknown abnormal state, A new abnormal neuron set can be created based on the actual data set. That is, a module corresponding to an actual unknown state detected by the detection means can be added to the knowledge base.
また、本発明の診断装置及び診断方法(請求項18,36)によれば、ユークリッド距離に基づく判定により、任意の実データセットが未知の異常状態であるか否かを正確に判別することができる。 Further, according to the diagnostic apparatus and diagnostic method of the present invention (claims 18 and 36), it is possible to accurately determine whether or not any actual data set is in an unknown abnormal state by determination based on the Euclidean distance. it can.
以下、図面により、本発明の実施の形態について説明する。
図1〜図11は本発明の一実施形態にかかる診断装置を説明するものであり、図1は本診断装置の全体構成を示す模式的構成図、図2は本診断装置での演算に係るユークリッド距離の概念を説明するための模式図、図3(a)〜(d)は本診断装置での判定に係る類似度の概念を説明するための模式図、図4は平均距離ADP0の演算内容を説明するための模式図、図5は平均最小距離AMD0の演算内容を説明するための模式図、図6は平均距離ADPの演算内容を説明するための模式図、図7は平均最小距離AMDの演算内容を説明するための模式図、図8は加重平均最小距離WAMD2の演算内容を説明するための模式図、図9は本診断装置におけるニューロンセットのモジュール作成制御内容を示すフローチャート、図10は本診断装置の第1診断装置における診断制御内容を示すフローチャート、図11は本診断装置の第2診断装置における診断制御内容を示すフローチャートである。
Hereinafter, embodiments of the present invention will be described with reference to the drawings.
FIGS. 1 to 11 illustrate a diagnostic apparatus according to an embodiment of the present invention. FIG. 1 is a schematic configuration diagram illustrating the overall configuration of the diagnostic apparatus. FIG. 2 relates to computation in the diagnostic apparatus. 3A to 3D are schematic diagrams for explaining the concept of similarity according to the determination in the diagnostic apparatus, and FIG. 4 is an average distance ADP 0 . FIG. 5 is a schematic diagram for explaining the computation content of the average minimum distance AMD 0 , FIG. 6 is a schematic diagram for explaining the computation content of the average distance ADP, and FIG. FIG. 8 is a schematic diagram for explaining the calculation contents of the minimum distance AMD, FIG. 8 is a schematic diagram for explaining the calculation contents of the weighted average minimum distance WAMD 2 , and FIG. 9 shows the module creation control contents of the neuron set in this diagnostic apparatus. FIG. 10 is a flowchart of the first diagnostic apparatus of the present diagnostic apparatus. FIG. 11 is a flowchart showing the diagnostic control contents in the second diagnostic apparatus of the present diagnostic apparatus.
[構成]
[1]全体構成
図1に示すように、本診断装置は、油圧ショベルの状態を診断の対象としたものであり、油圧ショベル上で診断を行うための第1診断装置10と、油圧ショベルから離れた場所にあるサービスセンターで診断を行うための第2診断装置20とを備えて構成される。
[Constitution]
[1] Overall Configuration As shown in FIG. 1, this diagnostic apparatus is intended for diagnosis of the state of a hydraulic excavator. From the first
第1診断装置10は、油圧ショベルの内部に搭載された装置であり、データ検出装置(検出手段)1,ECU(電子制御装置)2及び表示装置3を備えて構成される。ECU2とは、処理プログラムを内蔵した記憶装置(ROM,RAM等)や中央処理装置(CPU)を備えたコンピュータであり、内部に機能部位として、記憶部4,診断部(診断手段)5,圧縮部(圧縮手段)6及び通信部7を備えている。
The first
一方、第2診断装置20は、油圧ショベルの外部に設けられた装置であり、ECU12及び表示装置13を備えている。ECU12は、第1診断装置10のECU2と同様のコンピュータであり、内部に機能部位として、記憶部14,診断部(診断手段)15及び通信部17を備えている。なお、この第2診断装置20は、第1診断装置10が設けられた油圧ショベルを所有、あるいは管理する事業所のサービスセンター内に設けられている。
On the other hand, the second
データ検出装置1には、油圧ショベルに関する各パラメータ(変動要素)に対応する各種のセンサが設けられている。これらのセンサは、油圧ショベルの動作に応じて変動する各パラメータ値を各動作モード毎に検出するようになっている。
なお、ここで検出されるパラメータとは、センサから直接検出されるデータのほか、ある検出データを演算等によって処理して、対応するパラメータの値を推定値として求めたものを含む。例えば、エンジン回転数,燃料消費量,油圧ポンプ圧力(1つ又は複数の油圧ポンプ圧力),油圧回路内の油温,車体の前進・後進或いは旋回を制御する作動圧,バケットを制御するバケットシリンダの作動圧,スティックを制御するスティックシリンダの作動圧,ブームを制御するブームシリンダの作動圧などが挙げられる。
The
The parameter detected here includes not only data directly detected from the sensor but also data obtained by processing certain detected data by calculation or the like, and obtaining the value of the corresponding parameter as an estimated value. For example, engine speed, fuel consumption, hydraulic pump pressure (one or more hydraulic pump pressures), oil temperature in hydraulic circuit, operating pressure to control forward / backward or turning of vehicle body, bucket cylinder to control bucket Operating pressure of the stick cylinder that controls the stick, operating pressure of the boom cylinder that controls the boom, and the like.
本診断装置では、これらの同時に検出された各パラメータ(同一の状態下において検出された各パラメータのことを意味し、ここでは同時刻に検出された各パラメータのことをいう)が、ひとつのデータ(データ点)xとしてECU2へ入力されるようになっている。
In this diagnostic apparatus, each of these simultaneously detected parameters (meaning each parameter detected under the same condition, here, each parameter detected at the same time) is one data. (Data point) x is input to the
[2]記憶部4
続いて、ECU2の内部構成について説明する。まず記憶部4は、診断の基準となる情報を記憶しており、正常ニューロンセット記憶部(正常ニューロンセット記憶手段)4aと異常ニューロンセット記憶部(異常ニューロンセット記憶手段)4bとを備えて構成される。
[2]
Next, the internal configuration of the
正常ニューロンセット記憶部4aは、油圧ショベルが正常状態にあるときに検出されるデータ群(複数のデータ,データセット)の特徴を記憶する知識ベース(Module Knowledge-Base)である。ここでは、まず正常状態における複数のデータによって構成されるデータセットが作成されるとともに、ニューラルネットワークの教師なし学習によりこのデータセットを圧縮したニューロンセットが、正常ニューロンセットとして記憶されている。なお、知識ベースとは、単なる情報を集積したデータベース(Database)に対して、特定の問題を解決するのに必要な知識(Knowledge)を体系的に集約したものを意味する。
The normal neuron
一方、異常ニューロンセット記憶部4bは、油圧ショベルが異常状態(何らかの部品劣化や装置故障が生じかけている非正常の状態)であるときに検出されるデータ群の特徴を記憶する知識ベースである。ここでは、異常状態として、エンジンの故障や燃料ポンプの劣化,油圧ポンプの故障等といった複数種類の異常状態が想定されており、各異常状態下で検出される複数のデータによって構成されるデータセットが複数組作成されるとともに、ニューラルネットワークの教師なし学習により各データセットを圧縮したニューロンセットが、異常ニューロンセットとして、異常状態の種類とともに複数組記憶されている。
On the other hand, the abnormal neuron set
[3]記憶部4に記憶されているニューロンセット
ここで、正常ニューロンセット記憶部4a及び異常ニューロンセット記憶部4bに記憶されているニューロンセットについて詳述する。
本実施形態では、油圧ショベルの正常状態の特徴を示すニューロンセット(正常ニューロンセット)と異常状態の特徴を示すニューロンセット(異常ニューロンセット)とを複数個用意して、油圧ショベルの実稼働時に得られる実データセットが何れのニューロンセットに近似しているかを判定することによって、油圧ショベルの状態を診断する。記憶部4に記憶されている各ニューロンセットは、この判定のための基準となる知識であり、油圧ショベルの実稼働前に予め設定されている。
[3] Neuron sets stored in the
In this embodiment, a plurality of neuron sets (normal neuron set) indicating the characteristics of the normal state of the hydraulic excavator and neuron sets (abnormal neuron set) indicating the characteristics of the abnormal state are prepared, and are obtained during actual operation of the hydraulic excavator. The state of the hydraulic excavator is diagnosed by determining to which neuron set the actual data set to be approximated. Each neuron set stored in the
まず、正常状態の稼働データセット及び異常状態の稼働データセットを合計Lセット用意するものとする。例えば、正常稼働データセットを1セット,異常稼働データセットを第1異常状態から第4異常状態までの4セット用意する場合、L=5である。また、各稼働データセットの通し番号をfと表記して、対応する油圧ショベルの状態を便宜的に表すものとする。例えば、f=1が正常状態を示し、f=2〜5が第1異常状態〜第4異常状態を表すものとする。 First, a total of L sets of normal operation data sets and abnormal operation data sets are prepared. For example, when preparing one set of normal operation data sets and four sets of abnormal operation data sets from the first abnormal state to the fourth abnormal state, L = 5. In addition, the serial number of each operation data set is represented as f, and the state of the corresponding hydraulic excavator is represented for convenience. For example, f = 1 indicates a normal state, and f = 2 to 5 indicate a first abnormal state to a fourth abnormal state.
次に、各稼働データセットにおいて、データ検出装置1で検出されるデータを予めM個ずつ取得しておく。この数は、例えば数百〜数千個程度であり、これらのデータが油圧ショベルの所定の状態の典型的な動的特性を代表しているものと考える。以下、汎用表記のため、各稼働データセットで取得されるデータ数のことを、Mf(f=1,2,…,L)と表現する。例えば、正常状態の動的特性は、M1個のデータによって代表されるとものとし、また、第1異常状態〜第4異常状態の各動的特性は、M2〜M5個のデータによって代表されるものとする。
Next, in each operation data set, M pieces of data detected by the
また、各データは、同時に検出された、エンジン回転数や燃費,油圧ポンプ圧力等のK種類のパラメータを一組としたデータとする。したがって、各稼働データセットを構成するデータxf sは、以下のようなK次元のベクトルの形で表すことができる。 Each data is a set of K parameters such as engine speed, fuel consumption, hydraulic pump pressure, etc., which are detected simultaneously. Therefore, the data x f s constituting each operation data set can be expressed in the form of a K-dimensional vector as follows.
![]()
![]()
つまり、一つの稼働データセットは、K種類×Mf個の値によってその状態fが特徴づけられるものと考える。
また、このような稼働セットをLセット用意する。例えば、正常状態の稼働データセットのデータx1 sとしては、油圧ショベルが正常な状態での検出データを用意し、また、第1異常状態〜第4異常状態に対応するデータx2 s〜x5 sには、模擬的に油圧ショベルを故障状態にしたときに得られた検出データや、実際に検出されたデータを意図的に改変した試験データ等を用意する。
That is, it is considered that one operation data set is characterized by its state f by K types × M f values.
In addition, L sets of such operation sets are prepared. For example, as the data x 1 s of operation data sets in a normal state, the hydraulic excavator is provided to detect data in a normal state, also, the data x 2 s ~x corresponding to the first abnormal state to the fourth abnormal state In 5 s , detection data obtained when the hydraulic excavator is put into a simulated failure state, test data obtained by intentionally modifying the actually detected data, and the like are prepared.
そして、各稼働データセット毎に、Mf個のデータxf sをN個(N<M)のニューロンへと圧縮する。具体的には、N個のニューロンをK次元の空間にランダムに配置し、Mf個のデータxf sを用いて、ニューラルネットワークの教師なし学習により、各稼働データセットの特徴をニューロンに学習させる。以下、汎用表記のため、各稼働データセットで圧縮されたニューロン数のことを、Nf(f=1,2,…,L)と表現する。 Then, for each operating data set, M f data x f s is compressed into N (N <M) neurons. Specifically, N neurons are randomly arranged in a K-dimensional space, and the features of each operational data set are learned in neurons by unsupervised learning of the neural network using M f data x f s. Let Hereinafter, for general-purpose notation, the number of neurons compressed in each operation data set is expressed as N f (f = 1, 2,..., L).
学習を終えたNf個のニューロンからなるニューロンセットは、油圧ショベルの状態fに対応する圧縮データモデルであり、各ニューロンセットをQfと記すこととする。例えば、状態f=1に対応するニューロンセット(すなわち、正常ニューロンセット)をQ1と表し、状態f=2〜5に対応するニューロンセット(すなわち、異常ニューロンセット)をそれぞれ、Q2〜Q5と表す。また以下、特記なき限り、これらの正常,異常ニューロンセットQ1〜Q5のうちの何れか任意のニューロンセットのことを、単に記号Qで表す。このニューロンセットQを構成する各ニューロンwf qは、以下のようなK次元のベクトルの形で表すことができる。 The neuron set composed of N f neurons after learning is a compressed data model corresponding to the state f of the hydraulic excavator, and each neuron set is denoted as Q f . For example, neurons set corresponding to a state f = 1 (i.e., normal neurons set) to represent and Q 1, neuron set corresponding to a state f = 2 to 5 (i.e., abnormal neuron sets), respectively, Q 2 to Q 5 It expresses. Hereinafter, unless otherwise specified, any one of these normal and abnormal neuron sets Q 1 to Q 5 is simply represented by the symbol Q. Each neuron w f q constituting this neuron set Q can be expressed in the form of a K-dimensional vector as follows.
![]()
![]()
なお、上記の式2に示すように、各ニューロンwf qのベクトルは、K次元空間内における座標を表すものとみなすことができる。
また、各ニューロンwf qが、学習の過程において、Mf個のデータxf sのうちのいくつのデータxf sに対する勝者になっているか〔すなわち、Mf個のデータxf sに対して勝者ニューロン(Winning-neuron)となった割合〕を示すウェイト(第2ウェイト)gf qを以下の式3に基づいて算出しておく。
Note that, as shown in
Furthermore, each neuron w f q is in the process of learning, or has been the winner for a number of data x f s of the M f-number data x f s [i.e., with respect to M f-number data x f s Then, a weight (second weight) g f q indicating the ratio of becoming a winning neuron is calculated based on the following

各ニューロンセットQは、油圧ショベルの正常状態、あるいはある異常状態の特徴を示す最も代表的な情報を持っており、記憶部4内部において個別のモジュール(圧縮データモデル)として記憶されている。また、f=1に対応するニューロンセットQの各ニューロンw1 q及びウェイトg1 qは、正常ニューロンセット記憶部4aに記憶されており、一方、f=2〜5に対応するニューロンセットQの各ニューロンw2 q〜w5 q及びウェイトg2 q〜g5 qは、異常ニューロンセット記憶部4bに記憶されている。
Each neuron set Q has the most representative information indicating the characteristics of a normal state or a certain abnormal state of the hydraulic excavator, and is stored as an individual module (compressed data model) in the
各ニューロンセットQにおけるK次元空間内のニューロン分布は、その形や大きさ,密度が異なっており、それぞれのニューロンセットQが各状態fに対する動的挙動について最も適切な情報を有している。このようなニューロンセットQの状態判定基準としての特性から、各ニューロンセットQのことを単に「モジュール(Module)」とも呼ぶ。つまり、知識ベースとしての記憶部4は、想定される油圧ショベルの稼働状態fに応じた合計L個のモジュールを備えている。なお、ニューロンの数Nfの最適値は、記憶部4の記憶容量がコンパクトとなり、かつ、状態判定に支障のない程度の数に、実験や試験を通して経験的に設定されるものとする。
The neuron distribution in the K-dimensional space in each neuron set Q differs in shape, size, and density, and each neuron set Q has the most appropriate information on the dynamic behavior for each state f. Each neuron set Q is also simply referred to as a “Module” because of the characteristics of the neuron set Q as a condition determination criterion. That is, the
このようなニューロンセットQの学習は、油圧ショベルで実際の作業を行う前に、あるいは実際の作業とは切り分けて(本実施形態では、これを油圧ショベルの「予備運転時」ともいう)予め行っておくことが好ましい。したがって、例えば、油圧ショベルが製品として出荷される前に、出荷後行われるであろう一連の動作に沿って油圧ショベルを試験的に正常運転状態(異常が全くない状態)で動作させ、その結果得られた稼働データセットを用いて学習をさせておけばよい。あるいは、出荷前の油圧ショベルを意図的に異常運転状態で動作させて、その結果得られた稼働データセットを用いて学習をさせておけばよい。 Such learning of the neuron set Q is performed in advance before performing the actual work on the hydraulic excavator or separately from the actual work (in this embodiment, this is also referred to as “preliminary operation” of the hydraulic excavator). It is preferable to keep it. Therefore, for example, before the hydraulic excavator is shipped as a product, the hydraulic excavator is experimentally operated in a normal operation state (a state in which there is no abnormality) in accordance with a series of operations that will be performed after the shipment. Learning may be performed using the obtained operation data set. Alternatively, the hydraulic excavator before shipment may be intentionally operated in an abnormal operation state, and learning may be performed using the operation data set obtained as a result.
[4]診断部5
診断部5は、上記の通り予め記憶部4に記憶された知識と油圧ショベルの実稼働時にデータ検出装置1から得られるデータとを対比して類似度を計算し、油圧ショベルの具体的な診断を実施するものであり、類似度判定部(類似度判定手段,類似度演算方法設定手段)5a,類似ニューロンセット選択部(類似ニューロンセット選択手段)5b及び状態診断部(状態診断手段)5cを備えて構成される。
[4]
The
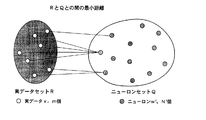
まず、類似度診断部5aは、油圧ショベルの状態が未確定である実稼働時において、データ検出装置1から入力されるデータ(ニューロンセットQの形成過程において参照されるデータと区別するために、以下、実データという)xrの集合と、記憶部4に記憶された各ニューロンセットQとの距離を演算し、類似度(近さの程度)を判定するものである。例えば5分間程度の短い稼働時間で取得されたm個からなる実データxrの集合を実データセットR(R={1,2,…,m})とする。
First, the
ここでいう距離とは、図2に模式的に示すように、K次元空間内における2集合間のユークリッド距離のことを意味する。一つのニューロンセットQは、K次元のニューロンNf個からなる集合であるから、実データセットR及びニューロンセットQは、同一のK次元空間内に配置することができる。そこで、図2に示すように、実データセットR及びニューロンセットQの距離が短いほど、実データセットRの特徴とニューロンセットQの特徴とが類似していると判定し、距離が長いほど、実データセットRの特徴とニューロンセットQの特徴とが相違していると判定することとする。 The distance here means the Euclidean distance between two sets in the K-dimensional space, as schematically shown in FIG. Since one neuron set Q is a set of N f K-dimensional neurons, the actual data set R and the neuron set Q can be arranged in the same K-dimensional space. Therefore, as shown in FIG. 2, it is determined that the shorter the distance between the actual data set R and the neuron set Q, the more similar the characteristics of the actual data set R and the characteristics of the neuron set Q are. It is determined that the characteristics of the actual data set R are different from the characteristics of the neuron set Q.
また、記憶部4に記憶されている各ニューロンセットQにおけるニューロンの分布は、その形や大きさ,密度が異なっているため、各ニューロンセットQを同一のK次空間内に仮想的に配置すると、図3(a)〜(d)に示すように、異なる分布が形成されることになる。そこで、実データセットRは、最も距離の近いニューロンセットQに対して最も類似していると判定することにする。
In addition, since the distribution of neurons in each neuron set Q stored in the
なお、実データセットRを構成する各実データ(単にデータ点とも呼ぶ)xr(r=1,2,…,m)とニューロンセットQを構成する各ニューロンwf qとの間のユークリッド距離D(r,q)は次式で求めることができる。 Note that the Euclidean distance between each actual data (also referred to simply as data points) x r (r = 1, 2,..., M) constituting the actual data set R and each neuron w f q constituting the neuron set Q. D (r, q) can be obtained by the following equation.
(A)平均距離ADP0の演算
実データセットRを構成する各データ点xrと任意のニューロンセットQを構成する各ニューロンwf qとの間の全てのペア(組み合わせ)の距離の平均値ADP0(R,Q)(mean of All Pairs Distances)を演算する。この平均距離ADP0(R,Q)は、以下の式6によって与えられる。
(A) Calculation of average distance ADP 0 Average value of the distances of all pairs (combinations) between each data point x r constituting the actual data set R and each neuron w f q constituting an arbitrary neuron set Q Calculate ADP 0 (R, Q) (mean of All Pairs Distances). This average distance ADP 0 (R, Q) is given by
(B)ウェイトgf qを考慮した加重平均距離WADP0の演算
実データセットRを構成する各データ点xrとニューロンセットQを構成する各ニューロンwf qとの間の全てのペア(組み合わせ)の距離に対して、ニューロンwf qのウェイトgf qを乗算したものの平均値(加重平均値)WAPD0(R,Q)(Weighted mean of All Pairs Distances)を演算する。この加重平均距離WAPD 0(R,Q)は、以下の式7によって与えられる。
(B) Calculation of weighted average distance WADP 0 considering weight g f q All pairs (combinations) between each data point x r constituting real data set R and each neuron w f q constituting neuron set Q relative distance), and calculates the average value of those multiplied by weight g f q neurons w f q (the weighted average) WAPD 0 (R, Q) (weighted mean of All Pairs distances). This weighted average distance WAPD 0 (R, Q) is given by
(C)平均最小距離AMD0の演算
実データセットRを構成する各実データxrに対して、最もユークリッド距離が近いニューロンwf qへの距離の平均値(平均最小値)AMD0(R,Q)(Average Minimum Distance)を演算する。この平均最小距離AMD0(R,Q)は、以下の式8によって与えられる。
(C) Calculation of average minimum distance AMD 0 For each actual data x r constituting the actual data set R, the average value (average minimum value) of the distance to the neuron w f q having the closest Euclidean distance AMD 0 (R , Q) (Average Minimum Distance) is calculated. This average minimum distance AMD 0 (R, Q) is given by Equation 8 below.
ここでCrminは、各実データxrからニューロンセットQまでの最小距離を示し、以下の式9で示される値を持つ。 Here, C rmin indicates the minimum distance from each actual data x r to the neuron set Q, and has a value represented by the following Expression 9.
![]()
![]()
(D)ウェイトgf qを考慮した加重平均最小距離WAMD0の演算
実データセットRを構成する各データ点xrに対して最もユークリッド距離が近いニューロンwf qへの距離に、そのニューロンwf qのウェイトgf qを乗算したものの平均値(加重平均最小値)WAMD0(R,Q)(Weighted Average Minimum Distance)を演算する。この加重平均最小距離WAMD0(R,Q)は、以下の式10によって与えられる。
(D) Calculation of Weighted Average Minimum Distance WAMD 0 Considering Weight g f q The neuron w is the distance to the neuron w f q that is closest to the Euclidean distance for each data point x r constituting the actual data set R. mean those multiplied by weight g f q of f q computing (weighted average minimum) WAMD 0 (R, Q) and (weighted average minimum Distance). This weighted average minimum distance WAMD 0 (R, Q) is given by
(E)重心間距離COGD0の演算
実データセットRの重心と、ニューロンセットQの重心とをそれぞれ計算し、両重心のユークリッド距離COGD0(R,Q)(Center-of-Gravity Distance)を演算する。この重心間距離COGD0(R,Q)は、以下の式11によって与えられる。
(E) Calculation of center-of-gravity distance COGD 0 Calculate the center of gravity of the actual data set R and the center of gravity of the neuron set Q, and calculate the Euclidean distance COGD 0 (R, Q) (Center-of-Gravity Distance) of both centers of gravity. Calculate. This center-of-gravity distance COGD 0 (R, Q) is given by Equation 11 below.
類似度診断部5aは、以上の5種類の手法のそれぞれにおいて、実データセットRが最も距離の近いニューロンセットQを、類似度の高いニューロンセットQとして判定する。ここでの判定結果は、類似ニューロンセット選択部5bへ入力されるようになっている。
一方、類似ニューロンセット選択部5bは、上記の各手法毎に、最も類似度が高いと判定されたニューロンセットQを選択する。したがって、ここでは5通りの選択結果が得られることになる。
In each of the above five methods, the
On the other hand, the similar neuron set
そこで、状態診断部5cは、類似ニューロンセット選択部5bにおける選択結果のうち、最も選択された回数の多いニューロンセットQをさらに選別するようになっている。つまりここでは、5種類の手法による5通りの判断に基づいて、最終的な判断が多数決でなされることになる。これにより、最も多くの手法によって支持された油圧ショベルの状態が、当該ニューロンセットQに対応する種類の状態fであると診断されて、診断結果が表示装置3へ出力されるようになっている。
Therefore, the
最も選択された回数の多いニューロンセットQが正常データ記憶部4aに記憶された正常ニューロンセットQ1(f=1)である場合、状態診断部5cは、油圧ショベルが正常状態にあると診断する。一方、最も選択された回数の多いニューロンセットQが異常データ記憶部4bに記憶された異常ニューロンセットQf(f≠1)である場合には、油圧ショベルが異常状態にあると診断するとともに、そのニューロンセットが示す状態fに応じて、どのような種類の異常状態であるかを診断する。例えば、f=2の時には、第1異常状態であると診断し、f=5の時には、第4異常状態であると診断する。
When the most frequently selected neuron set Q is the normal neuron set Q 1 (f = 1) stored in the normal
[5]圧縮部6,通信部7
一方、圧縮部6は、データ検出装置1から入力されたデータxsを一時的に蓄え、所定の稼働時間毎にまとめて圧縮するものであり、例えば、1日の油圧ショベルの稼働によって蓄積された数千個以上のデータxsを、n個のニューロンへと圧縮する。このようなデータ圧縮の手法に関しては、前述の記憶部4に記憶された各ニューロンセットQの作成手法と同様である。ここでデータxsを圧縮して得られた実ニューロンの集合(実ニューロンセット)をPとすると、実ニューロンセットPを構成する各実ニューロンwpは、以下の式14に示すように、K次元のベクトルで表すことができる。
[5]
On the other hand, the
![]()
![]()
なお、各実ニューロンwpのベクトルは、K次元空間内における座標を表すものとみなすことができる。
また、圧縮部6は、各実ニューロンwpの学習の過程において、例えばm0個のデータxsのうちのいくつのデータxsに対する勝者になっているかを示すウェイト(第1ウェイト)gpを、以下の式15に基づいて算出する。
Note that the vector of each real neuron w p can be regarded as representing coordinates in the K-dimensional space.
The
圧縮部6で算出された実ニューロンセットPの各実ニューロンwp及びそれらのウェイトgpは、通信部7へ入力されるようになっている。
通信部7は、油圧ショベルの外部へ無線送信を行うためのものであり、圧縮部6から入力された情報を、事業所のサービスセンター内に設けられた第2診断装置20へと送信する。通信部7における通信頻度は、圧縮部6における圧縮頻度に対応しており、例えば油圧ショベルの稼働終了後に、1日1回送信されるようになっている。
The real neurons w p of the real neuron set P calculated by the
The
[6]第2診断装置20
第1診断装置10の通信部7から送信された情報は、第2診断装置20の通信部17によって受信され、診断部15へと入力されるようになっている。なお、第2診断装置20の記憶部14は、第1診断装置10の記憶部4と全く同一の構成を備えており、正常ニューロンセット記憶部14a及び異常ニューロンセット記憶部14bには、正常ニューロンセット記憶部4a及び異常ニューロンセット記憶部4bに記憶されているものと同一のニューロンセットが記憶されている。
[6] Second
Information transmitted from the
[7]診断部15
診断部15は、予め記憶部14に記憶された知識と通信部17から入力された情報とを対比して類似度を計算し、油圧ショベルの具体的な診断を実施するものである。この情報診断部15は、第1診断装置10の情報診断部5と同様に、類似度判定部(類似度判定手段)15a,類似ニューロンセット選択部(類似ニューロンセット選択手段)15b及び状態診断部(状態診断手段)15cを備えて構成されるが、各機能部における制御内容が若干異なっている。
[7]
The
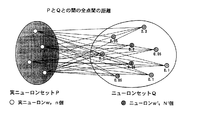
類似度診断部15aは、通信部17から入力された実ニューロンセットPの各実ニューロンwp及びそれらのウェイトgpと記憶部14に記憶された各ニューロンセットQとの距離を演算し、類似度を判定する。つまり、第1診断装置10では実データセットRと各ニューロンセットQとの対比によって類似度を判定しているが、第2診断装置20では、ニューロン同士の対比(実ニューロンセットPとニューロンセットQとの対比)によって類似度を判定することになる。実ニューロンwpはK次元のニューロンn個からなる集合であるから、実ニューロンwp及びニューロンセットQは、同一のK次元空間内に配置することができ、ユークリッド距離を計測できることになる。そこで、類似度診断部5aにおける判定と同様に、実ニューロンwp及びニューロンセットQの距離が短いほど、実ニューロンセットPの特徴とニューロンセットQの特徴とが類似していると判定する。
また、類似度診断部15aは、6種類の手法を用いて、実ニューロンwpと各ニューロンセットQとの距離を演算するようになっている。以下にその6種類の手法を説明する。
The
Further, the
(A)平均距離ADPの演算
実ニューロンセットPを構成する各実ニューロンwpと任意のニューロンセットQを構成する各ニューロンwf qとの間の全てのペア(組み合わせ)の距離の平均値ADP(P,Q)(mean of All Pairs Distances)を演算する。まず、実ニューロンwpとニューロンwf qとのユークリッド距離D(p,q)は、以下の式17によって与えられるため、平均距離ADP(P,Q)は、以下の式18のように表すことができる。
(A) Calculation of average distance ADP Average value ADP of distances of all pairs (combinations) between each real neuron w p constituting real neuron set P and each neuron w f q constituting arbitrary neuron set Q Calculate (P, Q) (mean of All Pairs Distances). First, since the Euclidean distance D (p, q) between the real neuron w p and the neuron w f q is given by the following
(B)ウェイトgp,gf qを考慮した加重平均距離WADPの演算
実ニューロンセットPを構成する各実ニューロンwpとニューロンセットQの各ニューロンwf qとの間の全てのペア(組み合わせ)の距離に対して、実ニューロンwpのウェイトgp及びニューロンwf qのウェイトgf qを乗算し、その平均値を加重平均距離WAPD(P,Q)(Weighted mean of All Pairs Distances)として算出する。この加重平均距離WAPD (P,Q)は、以下の式19によって与えられる。
(B) Calculation of weighted average distance WADP considering weights g p and g f q All pairs (combinations) between each real neuron w p and each neuron w f q of neuron set Q constituting real neuron set P respect to the distance), the actual neurons W p multiplied by weights g p and the weight g f q neurons w f q of the mean value weighted average distance WAPD (P, Q) (weighted mean of All Pairs distances) Calculate as This weighted average distance WAPD (P, Q) is given by Equation 19 below.
(C)平均最小距離AMDの演算
実ニューロンセットPを構成する各実ニューロンwpに対して、最もユークリッド距離が近いニューロンwf qへの距離の平均値(平均最小値)AMD(P,Q)(Average Minimum Distance)を演算する。この平均最小距離AMD(P,Q)は、以下の式20によって与えられる。
(C) Calculation of average minimum distance AMD For each real neuron w p constituting the real neuron set P, the average value (average minimum value) AMD (P, Q) to the neuron w f q having the closest Euclidean distance ) (Average Minimum Distance) is calculated. This average minimum distance AMD (P, Q) is given by
![]()
![]()
(D)ウェイトgpを考慮した加重平均最小距離WAMD1の演算
各実ニューロンwpからニューロンセットQまでの最小距離Cpminに対して最もユークリッド距離が近いニューロンwf qへの距離に、mp(実ニューロンセットPのp番目のニューロンが勝者となっているデータ数)を乗じ稼働データ数m0で除算して、加重平均最小距離WAMD1(P,Q) (Weighted Average Minimum Distance, version 1)を演算する。この加重平均最小距離WAMD1(P,Q)は、以下の式22によって与えられる。
(D) Calculation of Weighted Average Minimum Distance WAMD 1 Considering Weight g p The distance to the neuron w f q closest to the Euclidean distance with respect to the minimum distance C pmin from each real neuron w p to the neuron set Q is represented by m Multiplying p (the number of data for which the pth neuron of the real neuron set P is the winner) and multiplying by the number of operating data m 0 , the weighted average minimum distance WAMD 1 (P, Q) (Weighted Average Minimum Distance, version Calculate 1). This weighted average minimum distance WAMD 1 (P, Q) is given by the following Equation 22.
(E)ウェイトgp,gqを考慮した加重平均最小距離WAMD2の演算
各実ニューロンwpからニューロンセットQまでの最小距離Cpminに対してウェイトgp,gqを乗じて、加重平均最小距離WAMD2(P,Q) (Weighted Average Minimum Distance, version 2)を演算する。この加重平均最小距離WAMD2(P,Q)は、以下の式23によって与えられる。
(E) Wait g p, is multiplied by the weight g p, g q for the minimum distance C pmin from g q was considered weighted average minimum distance WAMD 2 operations each real neuron W p to neuronal set Q, the weighted average Calculate the minimum distance WAMD 2 (P, Q) (Weighted Average Minimum Distance, version 2). This weighted average minimum distance WAMD 2 (P, Q) is given by Equation 23 below.
(F)重心間距離COGDの演算
実ニューロンセットPの重心と、ニューロンセットQの重心とをそれぞれ計算し、両重心のユークリッド距離COGD(P,Q)(Center-of-Gravity Distance)を演算する。この重心間距離COGD(P,Q)は、以下の式24によって与えられる。
(F) Calculation of center-of-gravity distance COGD Calculate the center of gravity of real neuron set P and the center of gravity of neuron set Q, and calculate the Euclidean distance COGD (P, Q) (Center-of-Gravity Distance) of both centers of gravity. . This center-of-gravity distance COGD (P, Q) is given by Equation 24 below.
以上の通り、類似度診断部15aは、6種類の手法のそれぞれにおいて、各実ニューロンwpの実ニューロンセットPにとって最も距離が近いニューロンセットQを、類似度の高いニューロンセットQとして判定する。ここでの判定結果は、類似ニューロンセット選択部15bへ入力されるようになっている。
一方、類似ニューロンセット選択部15bは、上記の各手法毎に、最も類似度が高いと判定されたニューロンセットQを選択する。したがって、ここでは6通りの選択結果が得られることになる。
As described above, the
On the other hand, the similar neuron set
そして、状態診断部15cは、類似ニューロンセット選択部15bにおける選択結果のうち、最も選択された回数の多いニューロンセットQを選別し、油圧ショベルの状態が、当該ニューロンセットQに対応する種類の状態fであると診断されて、診断結果が表示装置13へ出力されるようになっている。
Then, the
[フローチャート]
本実施形態に係る診断装置は、上述のように構成されており、その処理は図9〜図11に示すフローチャートに沿って実行される。本フローチャートは、ECU2及び12内において実行される制御内容を示しており、図9のフローは油圧ショベルの予備運転時に診断基準となるニューロンセットQの各モジュールを設定するために予め実行されるものであり、図10,図11のフローは油圧ショベルの実稼働時において診断を行うべく、所定周期で繰り返し実行されるものである。
[flowchart]
The diagnostic apparatus according to the present embodiment is configured as described above, and the processing is executed according to the flowcharts shown in FIGS. This flowchart shows the contents of control executed in the
(A)ニューロンセットQのモジュール作成フロー
図9に示すフローチャートにおいて、f=1に対応する正常状態の稼働データセットからf=5に対応する第4異常状態の稼働データセットを用いて、5種類のニューロンセット(モジュール)Q1〜Q5が作成される。
まずステップA10では、状態の種類fがf=1に設定される。続くステップA20では、状態f=1に対応する、上記の式1に示されるデータx1 sがM1個検出されて読み込まれる。ここで読み込まれるデータx1 sは、K次元のベクトルの形をなしている。
(A) Module creation flow of neuron set Q In the flowchart shown in FIG. 9, five types are used from the normal operation data set corresponding to f = 1 to the fourth abnormal operation data set corresponding to f = 5. Neuron sets (modules) Q 1 to Q 5 are created.
First, in step A10, the state type f is set to f = 1. In the subsequent step A20, M 1 data x 1 s shown in the
一方、ステップA30では、上記の式2に示されるN1個のニューロンがK次元の空間にランダムに配置され、続くステップA40において、ニューラルネットワークの教師なし学習によりデータx1 sがN1個のニューロンw1 qに圧縮される。これにより、各ニューロンw1 qは、データx1 sの特徴、すなわち、状態f=1に対する動的挙動についての適切な情報を備えることになる。
On the other hand, in step A30, N 1 neurons shown in
また続くステップA50では、前ステップで得られた各ニューロンw1 qのウェイトg1 qが、上記の式3,式4に基づいて算出される。そして、ステップA60において、f=1の状態に対応する各ニューロンw1 q及びウェイトg1 qが正常稼働時に対応するニューロンセット(モジュール)Q1として、正常ニューロンセット記憶部4aに記憶される。
その後、ステップA70では、状態fがf=Lであるか否かが判定される。ここで、f≠Lである場合には、ステップA80へ進んでfにf+1が代入され、ステップA20以降のフローが繰り返される。つまり、f=1の状態のモジュールの作成が完了すると、f=2の状態のモジュール,f=3の状態のモジュールと、続けて各モジュールが作成されることになる。このように、状態fの順に正常ニューロンセットQ1及び異常ニューロンセットQ2〜Q5の各モジュールが作成され、正常ニューロンセット記憶部4a及び異常ニューロンセット記憶部4bへ記憶される。
In the subsequent step A50, the weight g 1 q of each neuron w 1 q obtained in the previous step is calculated based on the
Thereafter, in step A70, it is determined whether or not the state f is f = L. If f ≠ L, the process proceeds to step A80 where f + 1 is substituted for f, and the flow after step A20 is repeated. That is, when the creation of the module in the state of f = 1 is completed, the modules in the state of f = 2, the module in the state of f = 3, and the respective modules are created. Thus, each module in order normal neuronal set to Q 1 and abnormal neuron set Q 2 to Q 5 states f is created and stored to the normal
一方、ステップA70においてf=Lである場合には、全ての稼働データセットに対応するモジュールが作成されたものとみなされて、このフローは終了する。 On the other hand, if f = L in step A70, it is considered that modules corresponding to all the operation data sets have been created, and this flow ends.
(B)第1診断装置10における診断フロー
図10に示すフローチャートのステップB10では、第1診断装置10の診断部5において、データ検出装置1から入力される実データセットRのデータ点xrがm個読み込まれる。
(B) Diagnosis Flow in
続くステップB20〜ステップB60では、類似度判定部5aにおいて実データセットRとの類似度の高いニューロンセットQが、それぞれのステップで選択され、5種類の選択結果が累積して記憶される。
まずステップB20では、上記の式6に基づき、各データ点xrと各ニューロンセットQを構成する各ニューロンwf qとの間の全てのペアの距離の平均値ADP0(R,Q)が演算される。つまりここでは、実データセットRとニューロンセットQとの平均値ADP0(R,Q)が、油圧ショベルの状態fに対応する5つのニューロンセットQ1〜Q5に対して演算されることになる。そして類似度判定部5aでは、この演算で最も類似度が高いと判定されたニューロンセットQが選択される。
In subsequent Step B20 to Step B60, the neuron set Q having a high similarity to the actual data set R is selected in the
First, in step B20, the average value ADP 0 (R, Q) of the distances of all pairs between each data point x r and each neuron w f q constituting each neuron set Q is calculated based on the
続いてステップB30では、上記の式7に基づき、実データセットRを構成する各データ点xrとニューロンセットQを構成する各ニューロンwf qとの間の全てのペアの距離に対して、ニューロンwf qのウェイトgf qを乗算したものの平均値WAPD0(R,Q)が演算される。つまりここでは、前ステップとは異なる手法で、実データセットRとニューロンセットQとの類似度が測られることになる。類似度判定部5aによる、前ステップでの選択結果とは別に、最も類似度が高いと判定されたニューロンセットQが選択される。
Subsequently, in step B30, based on the
ステップB40では、上記の式8に基づき、実データセットRを構成する各データ点xrに対して、最もユークリッド距離が近いニューロンwf qへの距離の平均値AMD0(R,Q)が演算される。そして前ステップと同様に、上記の選択結果からは独立して、最も類似度が高いと判定されたニューロンセットQが選択される。
また、ステップB50では、上記の式10に基づき、実データセットRを構成する各データ点xrに対して最もユークリッド距離が近いニューロンwf qへの距離に、そのニューロンwf qのウェイトgf qを乗算したものの平均値WAMD0(R,Q)が演算されてニューロンセットQが選択され、ステップB60では、上記の式11に基づき、実データセットRの重心とニューロンセットQの重心との間の距離COGD0(R,Q)が演算されてニューロンセットQが選択される。
In step B40, the average value AMD 0 (R, Q) of the distance to the neuron w f q having the closest Euclidean distance is obtained for each data point x r constituting the actual data set R based on the above equation 8. Calculated. As in the previous step, the neuron set Q determined to have the highest similarity is selected independently of the selection result.
In step B50, based on the
そして、ステップB70では、類似ニューロンセット選択部5bにおいて、ステップB20〜ステップB60での選択結果のうち、最も選択された回数の多いニューロンセットQが選別される。これにより、ステップB80では、状態診断部5cにおいて、前ステップで最終的に選別されたニューロンセットQに対応する状態fが、各データ点xrの特徴と最も類似しているとみなされ、診断結果が表示装置3へ出力されて、このフローは終了する。
In step B70, the similar neuron set
(C)第2診断装置20における診断フロー
図11に示すフローチャートのステップC10では、第2診断装置20の診断部15において、通信部7,17を介して入力される実ニューロンセットPの各実ニューロンwp及びウェイトgpがそれぞれn個読み込まれる。つまり、第1診断装置10では、データ検出装置1で得られた生データ(圧縮加工がなされていないデータ)を用いて油圧ショベルの稼働状態を診断するのに対し、第2診断装置20は、データ検出装置1で得られた生データを圧縮加工したニューロンを用いて油圧ショベルの稼働状態を診断する。
(C) Diagnosis Flow in
続くステップC20〜ステップC70では、類似度判定部15aにおいて実ニューロンセットPとの類似度の高いニューロンセットQが、それぞれのステップで選択され、6種類の選択結果が累積して記憶される。
まず、ステップC20では、上記の式17に基づき、類似度判定部15aにおいて実ニューロンセットPを構成する各実ニューロンwpと任意のニューロンセットQを構成する各ニューロンwf qとの間の全てのペアの距離の平均値ADP(P,Q)が演算される。そして、この演算で最も類似度が高いと判定されたニューロンセットQが選択される。
In subsequent steps C20 to C70, the neuron set Q having a high similarity with the real neuron set P is selected in the
First, in step C20, based on the
次に、ステップC30では、上記の式19に基づき、実ニューロンセットPの各実ニューロンwpとニューロンセットQの各ニューロンwf qとの間の全てのペアの距離に対して、実ニューロンwpのウェイトgp及びニューロンwf qのウェイトgf qを乗算したものの平均値WAPD(P,Q)が演算され、最も類似度が高いとニューロンセットQが選択される。
続くステップC40〜C70においても、上記の式20〜式26に基づき、それぞれ、平均最小距離AMD(P,Q),加重平均最小距離WAMD1(P,Q),加重平均最小距離WAMD2(P,Q)及び重心間距離COGD(P,Q)が演算され、それぞれの手法において最も類似度が高いと判定されたニューロンセットQが選択される。
Next, in step C30, the real neuron w is calculated for all pairs of distances between each real neuron w p of the real neuron set P and each neuron w f q of the neuron set Q based on the above equation 19. p weights g p and neuronal w f q of weights g f q mean those multiplied by WAPD (P, Q) is calculated, the neuron set Q is selected to have the highest degree of similarity.
Also in the subsequent steps C40 to C70, the average minimum distance AMD (P, Q), the weighted average minimum distance WAMD 1 (P, Q), and the weighted average minimum distance WAMD 2 (P , Q) and the center-of-gravity distance COGD (P, Q) are calculated, and the neuron set Q determined to have the highest similarity in each method is selected.
そして、ステップC80では、類似ニューロンセット選択部51bにおいて、ステップC20〜ステップC70での選択結果のうち、最も選択された回数の多いニューロンセットQが選別される。これにより、ステップC90では、状態診断部15cにおいて、前ステップで最終的に選別されたニューロンセットQに対応する状態fが、各実ニューロンwpの特徴と最も類似しているとみなされ、診断結果が表示装置13へ出力されて、このフローは終了する。
In step C80, the similar neuron set selection unit 51b selects the neuron set Q that is selected most frequently from the selection results in steps C20 to C70. Thereby, in step C90, the
[効果]
本発明の一実施形態に係る診断装置は、以下のような効果を奏する。
まず、油圧ショベル内に設けられた第1診断装置10では、データ検出装置1で得られた生の実データからなる実データセットRと記憶部4に記憶されたニューロンセットQとを対比することによって診断を行うため、データの取得後、迅速に診断を行うことができる。つまり、セミリアルタイムの診断が可能であり、例えば表示装置3を油圧ショベルのキャブ内に設置しておけば、油圧ショベルのオペレータ(操作者)に診断結果を報知することができ、自主的な予知保全メンテナンスを促すことができる。なお、油圧系統やエンジン油温,作動油温等、比較的状態変化の速い異常状態を診断する場合には、このようなセミリアルタイムの診断が有効であると考えられる。
[effect]
The diagnostic device according to an embodiment of the present invention has the following effects.
First, in the first
一方、サービスセンター内に設けられた第2診断装置20は、圧縮された実ニューロンからなる実ニューロンセットPと記憶部14に記憶されたニューロンセットQとを対比することによって診断を行うようになっているため、通信部7,17同士の通信データ量を大幅に削減することができ、診断にかかる通信コストを低減させることができる。特に、油圧ショベルの月例点検や年次点検のように、診断結果に即時性が求められない内容の診断を行いたい場合には、第2診断装置20による診断が有利である。例えば、異常状態として、車載バッテリの寿命を診断する場合や、エアコンのフィルタ清掃状態を診断する場合など、比較的状態変化が緩慢な異常状態を診断する場合が挙げられる。
On the other hand, the second
また、上記の何れの診断装置10,20においても、記憶部4,14に同一のニューロンセットQが記憶されているため、構成が簡素であるだけでなく、診断基準となる知識ベースを規格化することができ、診断の信憑性を高めることができる。
また、記憶部4,14に記憶される各ニューロンセットQは、予め設定された状態f毎にモジュール化されているため、交換や置換,追加が極めて容易である。本実施形態では構成を簡略化して、1つの正常状態と4つの異常状態とを診断する場合を説明しているが、正常状態,異常状態ともに想定しうる状態の数には制限がなく、知識ベースを限りなく増強することが可能である。
In any of the above
In addition, since each neuron set Q stored in the
また、本診断装置によれば、まず油圧ショベルが正常状態であるか否かを判定することができるだけでなく、異常状態である場合にはその異常の種類まで診断することができる。つまり、従来の診断装置では、少なくとも「正常ではない」ことを以て異常状態を把握していたが、本診断装置では具体的に「第1異常状態」であることや「第4異常状態」であることを把握することができる。また、上記の通り、知識ベースを増強することにより、本診断装置が診断しうる劣化や異常状態の種類を限りなく増加させることもできる。したがって、油圧ショベルの状態をより明確に把握することができ、診断された異常状態に応じたメンテナンスが可能となり、予知保全が容易となる。 Further, according to the present diagnostic apparatus, it is possible not only to determine whether or not the hydraulic excavator is in a normal state, but also to diagnose the type of abnormality when it is in an abnormal state. That is, in the conventional diagnostic device, the abnormal state is grasped by at least “not normal”, but in this diagnostic device, it is specifically “first abnormal state” or “fourth abnormal state”. I can understand that. Further, as described above, by enhancing the knowledge base, the types of deterioration and abnormal states that can be diagnosed by the diagnostic apparatus can be increased without limit. Therefore, the state of the hydraulic excavator can be grasped more clearly, maintenance according to the diagnosed abnormal state is possible, and predictive maintenance is facilitated.
また、診断手法に関して、油圧ショベルの状態に応じて変動する複数のパラメータ全体を一つのデータとして扱うようになっているため、例えば各パラメータを個別に判定するような手法では事実上困難である総括的な判定が可能となる。
また、同時に検出された複数のパラメータを、ある状態を示す「点」として捉えることにより、点の集合同士の距離を「状態の近さ」として捉え直すことができる。また、これに加えて、診断のアルゴリズムに関して、検出データに基づく集合(実データセットRや実ニューロンセットP)とニューロンセットQとの距離によって二つの集合の類似度を判定するようになっているため、検出データに基づく集合の特徴を正確に把握することができる。
Also, with regard to the diagnostic method, since all of a plurality of parameters that vary depending on the state of the hydraulic excavator are handled as one data, for example, a summary that is practically difficult with a method in which each parameter is individually determined, for example. Judgment is possible.
Further, by capturing a plurality of parameters detected at the same time as “points” indicating a certain state, it is possible to re-recognize the distance between a set of points as “state proximity”. In addition to this, regarding the diagnosis algorithm, the similarity between the two sets is determined by the distance between the set (actual data set R or real neuron set P) based on the detected data and the neuron set Q. Therefore, it is possible to accurately grasp the characteristics of the set based on the detection data.
また、状態診断部5cにおいては、5種類の手法による5通りの判断に基づき、最終的な判断が多数決でなされるため、判定結果の信頼性を高めることができる。
なお、本診断装置では、類似度の判定に係る演算手法が第1診断装置10では5種類,第2診断装置20では6種類挙げられており、これらの演算手法は、互いに診断の確からしさ(信憑性,信頼性)に優劣が付けられるものではない。
Moreover, in the
In this diagnostic apparatus, there are five types of calculation methods for determining the degree of similarity in the first
[その他]
以上、本発明の一実施形態を説明したが、本発明はかかる実施形態に限定されるものではなく、本発明の趣旨を逸脱しない範囲で種々変形して実施することができる。
例えば、上述の実施形態では、記憶部4が、図9に示されたような過程を経て、診断の基準となるモジュールを予め記憶するようになっているが、例えば記憶部4を書き換え可能のメモリで構成すれば、現在の知識ベースにはない新たな異常状態が生じた場合に、その異常状態を表すニューロンからなるモジュールを付け加えたり、古いモジュールを新しいものに置き換えたりすることも可能であり、診断精度をより向上させることができる。
[Others]
Although one embodiment of the present invention has been described above, the present invention is not limited to this embodiment, and various modifications can be made without departing from the spirit of the present invention.
For example, in the above-described embodiment, the
なお、このようなモジュールの更新や変更時には、実データセットに対応する状態が、「未知の異常状態」にあるか否かを判定する手段(未知異常状態判定手段)を備えることが好ましい。例えば、実データセットと異常ニューロンセットとのユークリッド距離に基づき、実データセットが何れの異常ニューロンセットに対しても類似していない場合(実データセットと各異常ニューロンセットとのユークリッド距離が、何れも、予め設定された所定距離よりも大きい場合など)に、対象体が未知の異常状態にあると判定する判定部をECU2,12内に設けておいてもよいし、あるいは、実データセットを観察しているオペレータや管理者の判断で、「未知の異常状態」を判定するようにしてもよい。
When updating or changing such a module, it is preferable to include means for determining whether or not the state corresponding to the actual data set is in an “unknown abnormal state” (unknown abnormal state determination unit). For example, based on the Euclidean distance between the actual data set and the abnormal neuron set, when the actual data set is not similar to any abnormal neuron set (the Euclidean distance between the actual data set and each abnormal neuron set is In addition, a determination unit that determines that the target object is in an unknown abnormal state may be provided in the
何れの場合においても、未確定な状態に対応する任意の実データセットを、「未知の異常状態」に対応する実データセットとして用いることにより、その実データセットに基づく新たな異常ニューロンセットを作成することができる。つまり、検出手段で検出された実際の未知の状態に対応するモジュールを知識ベースに追加することができる。
また、上述の実施形態では、類似度判定部5aが5種類の手法を用いて、K次元の実データセットR,実ニューロンセットPとK次元のニューロンセットQとの距離を演算するようになっているが、これらの距離の演算手法についてはこれに限定されるものではない。また、類似度判定部15aにおける6種類の手法についても同様である。逆に、これらの手法のうちの少なくとも何れかの手法を用いて、集合同士の距離を演算する構成としてもよい。
In any case, a new abnormal neuron set based on the actual data set is created by using an arbitrary actual data set corresponding to the undetermined state as an actual data set corresponding to the “unknown abnormal state”. be able to. That is, a module corresponding to an actual unknown state detected by the detection means can be added to the knowledge base.
In the above-described embodiment, the
また、上述の実施形態では、状態診断部5cが類似ニューロンセット選択部5bにおける選択結果のうち、最も選択された回数の多いニューロンセットQをさらに選別するようになっているが、最終的な選別方法はこれに限定されない。例えば、各手法で演算された距離の合計が最も小さいものを選別する構成としてもよいし、各手法毎に、選択結果の信頼性の重み付けを行うようにしてもよい。
Further, in the above-described embodiment, the
なお、本実施形態では、診断の対象として油圧ショベルを例に挙げたが、対象体はこれに限定されるものではなく、例えばトラック・バス,船舶等の乗物類、及び、産業機械をはじめとした各種機械類の動作の良否判定等に広く適用できるほか、動植物や微生物等の生命体の状態の良否判定等や、天候或いは地球等、天体の変化の推定等にも適用することができる。 In the present embodiment, a hydraulic excavator is taken as an example of a diagnosis target, but the target is not limited to this, for example, vehicles such as trucks and buses, ships, and industrial machines. The present invention can be widely applied to the determination of the quality of operations of various machinery, and the like, and can also be applied to the determination of the quality of life forms such as animals and plants and microorganisms, and estimation of changes in celestial bodies such as weather or the earth.
1 データ検出装置(検出手段)
2,12 ECU
3,13 表示装置
4,14 記憶部
4a,14a 正常ニューロンセット記憶部(正常ニューロンセット記憶手段)
4b,14b 異常ニューロンセット記憶部(異常ニューロンセット記憶手段)
5,15 診断部(診断手段)
5a,15a 類似度判定部(類似度判定手段,類似度演算方法設定手段)
5b,15b 類似ニューロンセット選択部(類似ニューロンセット選択手段)
5b,15c 状態診断部(状態診断手段)
6 圧縮部(圧縮手段)
7,17 通信部
10 第1診断装置
20 第2診断装置
P:実ニューロンセット
Q:ニューロンセット(モジュール)
Q1:正常ニューロンセット
Q2〜Q5:異常ニューロンセット
R:実データセット
1 Data detection device (detection means)
2,12 ECU
3,13
4b, 14b Abnormal neuron set storage unit (abnormal neuron set storage means)
5,15 Diagnosis section (diagnostic means)
5a, 15a Similarity determination unit (similarity determination means, similarity calculation method setting means)
5b, 15b Similar neuron set selection unit (similar neuron set selection means)
5b, 15c State diagnosis unit (state diagnosis means)
6 Compression unit (compression means)
7, 17
Q 1 : Normal neuron set Q 2 to Q 5 : Abnormal neuron set R: Actual data set
Claims (36)
該対象体の該状態に応じて変動する複数のパラメータからなるデータを検出する検出手段と、
正常状態にある該対象体から該検出手段によって検出された複数の該データをデータセットとして、ニューラルネットワークの教師なし学習により圧縮した正常ニューロンセットを記憶する正常ニューロンセット記憶手段と、
異常状態にある該対象体から該検出手段によって検出された複数の該データをデータセットとして、ニューラルネットワークの教師なし学習により圧縮した異常ニューロンセットを、該異常状態の種類とともに複数組記憶する異常ニューロンセット記憶手段と、
該対象体の該状態が未確定であるときに該検出手段によって検出される複数の該データを実データセットとして、該実データセットと該正常ニューロンセット記憶手段に記憶された該正常ニューロンセットとに基づいて、該対象体が正常状態にあるか否かを判定するとともに、該実データセットと該異常ニューロンセット記憶手段に記憶された該異常ニューロンセットとに基づいて、該対象体における該異常状態の種類を診断する診断手段と
を備えたことを特徴とする、診断装置。 A diagnostic device for diagnosing the state of an object,
Detection means for detecting data consisting of a plurality of parameters that vary according to the state of the object;
Normal neuron set storage means for storing a normal neuron set compressed by unsupervised learning of a neural network as a data set of a plurality of the data detected by the detection means from the object in a normal state;
An abnormal neuron that stores a plurality of abnormal neuron sets, which are compressed by unsupervised learning of a neural network, together with the types of abnormal states, as a data set, a plurality of the data detected by the detecting means from the object in an abnormal state Set storage means;
A plurality of the data detected by the detection means when the state of the object is uncertain is used as an actual data set, and the actual data set and the normal neuron set stored in the normal neuron set storage means And determining whether or not the object is in a normal state, and based on the actual data set and the abnormal neuron set stored in the abnormal neuron set storage means, the abnormality in the object is determined. A diagnostic apparatus comprising: a diagnostic unit that diagnoses a type of a state.
該実データセットと該異常ニューロンセットとのユークリッド距離が小さいほど、該実データセットの該異常ニューロンセットに対する類似度が高いと判定する類似度判定手段と、
該類似度判定手段により該実データセットとの類似度が最も高いと判定された異常ニューロンセットを選択する類似ニューロンセット選択手段と、
該対象体における該異常状態を、該類似ニューロンセット選択手段で選択された該異常ニューロンセットに対応する種類の該異常状態であると診断する状態診断手段とを有する
ことを特徴とする、請求項1記載の診断装置。 The diagnostic means
Similarity determination means for determining that the smaller the Euclidean distance between the actual data set and the abnormal neuron set is, the higher the similarity between the actual data set and the abnormal neuron set is;
Similar neuron set selection means for selecting an abnormal neuron set determined by the similarity determination means to have the highest similarity with the actual data set;
The state diagnostic means for diagnosing that the abnormal state in the object is the abnormal state of the type corresponding to the abnormal neuron set selected by the similar neuron set selecting means. The diagnostic apparatus according to 1.
該診断手段が、
該圧縮手段で圧縮された実ニューロンセットと該異常ニューロンセットとのユークリッド距離が小さいほど、該実ニューロンセットの該異常ニューロンセットに対する類似度が高いと判定する類似度判定手段と、
該類似度判定手段により類似度が最も高いと判定された異常ニューロンセットを選択する類似ニューロンセット選択手段と、
該対象体における該異常状態を、該類似ニューロンセット選択手段で選択された該異常ニューロンセットに対応する種類の該異常状態であると診断する状態診断手段とを有する
ことを特徴とする、請求項1記載の診断装置。 A plurality of the data detected by the detection means when the state of the object is indeterminate, as a real data set, comprising compression means for compressing into a real neuron set by unsupervised learning of a neural network;
The diagnostic means
Similarity determination means for determining that the similarity of the real neuron set to the abnormal neuron set is higher as the Euclidean distance between the real neuron set compressed by the compression means and the abnormal neuron set is smaller;
A similar neuron set selection means for selecting the abnormal neuron set determined to be the highest by the similarity determination means;
The state diagnostic means for diagnosing that the abnormal state in the object is the abnormal state of the type corresponding to the abnormal neuron set selected by the similar neuron set selecting means. The diagnostic apparatus according to 1.
ことを特徴とする、請求項2記載の診断装置。 The similarity determination means calculates the average value of the Euclidean distance between each data constituting the actual data set and each neuron constituting the abnormal neuron set, and determines the similarity. The diagnostic device according to claim 2.
該類似度判定手段が、該実データセットを構成する各データと該異常ニューロンセットを構成する各ニューロンとの間のユークリッド距離の平均値及び該ウェイトに基づいて該類似度を判定する
ことを特徴とする、請求項2記載の診断装置。 The abnormal neuron set storage means calculates a weight for each neuron when compressed into the abnormal neuron set,
The similarity determination means determines the similarity based on an average value of Euclidean distance between each data constituting the actual data set and each neuron constituting the abnormal neuron set and the weight. The diagnostic apparatus according to claim 2.
ことを特徴とする、請求項2記載の診断装置。 The similarity determination means calculates the average value of the minimum Euclidean distance between each data constituting the actual data set and each neuron constituting the abnormal neuron set, and determines the similarity. The diagnostic device according to claim 2.
該類似度判定手段が、該実データセットを構成する各データと該異常ニューロンセットを構成する各ニューロンとの間の最小ユークリッド距離の平均値及び該ウェイトに基づいて該類似度を判定する
ことを特徴とする、請求項2記載の診断装置。 The abnormal neuron set storage means calculates a weight for each neuron when compressed into the abnormal neuron set,
The similarity determination means determines the similarity based on the average value of the minimum Euclidean distance between each data constituting the actual data set and each neuron constituting the abnormal neuron set and the weight. The diagnostic apparatus according to claim 2, wherein the diagnostic apparatus is characterized.
ことを特徴とする、請求項2記載の診断装置。 3. The diagnostic apparatus according to claim 2, wherein the similarity determination unit determines the similarity by calculating a Euclidean distance between the center of gravity of the actual data set and the center of gravity of the abnormal neuron set.
ことを特徴とする、請求項3記載の診断装置。 The similarity determination means calculates the average value of the Euclidean distances of all pairs of each neuron constituting the real neuron set and each neuron constituting the abnormal neuron set to determine the similarity. The diagnostic device according to claim 3.
該異常ニューロンセット記憶手段が、該異常ニューロンセットへの圧縮時に各ニューロン毎の第2ウェイトを演算するとともに、
該類似度判定手段が、該実ニューロンセットを構成する各ニューロンと異常ニューロンセットを構成する各ニューロンとの全てのペアのユークリッド距離の平均値,該第1ウェイト及び該第2ウェイトに基づいて該類似度を判定する
ことを特徴とする、請求項3記載の診断装置。 The compression means calculates a first weight for each neuron when compressing into the real neuron set;
The abnormal neuron set storage means calculates a second weight for each neuron when compressing the abnormal neuron set,
The similarity determination means is based on an average value of Euclidean distances of all pairs of each neuron constituting the real neuron set and each neuron constituting the abnormal neuron set, the first weight, and the second weight. The diagnostic apparatus according to claim 3, wherein the similarity is determined.
ことを特徴とする、請求項3記載の診断装置。 The similarity determination means calculates the average value of the minimum Euclidean distance from each neuron constituting the real neuron set to each neuron constituting the abnormal neuron set, and determines the similarity. The diagnostic device according to claim 3.
該類似度判定手段が、該実ニューロンセットを構成する各ニューロンから該異常ニューロンセットを構成する各ニューロンまでの最小ユークリッド距離の平均値及び該第1ウェイトに基づいて該類似度を判定する
ことを特徴とする、請求項3記載の診断装置。 The compression means calculates a first weight for each neuron when compressing to the real neuron set,
The similarity determination means determines the similarity based on an average value of minimum Euclidean distances from each neuron constituting the real neuron set to each neuron constituting the abnormal neuron set and the first weight. The diagnostic apparatus according to claim 3, wherein the diagnostic apparatus is characterized.
該異常ニューロンセット記憶手段が、該異常ニューロンセットへの圧縮時に各ニューロン毎の第2ウェイトとを演算するとともに、
該類似度判定手段が、該実ニューロンセットを構成する各ニューロンから該異常ニューロンセットを構成する各ニューロンまでの最小ユークリッド距離の平均値,該第1ウェイト及び該第2ウェイトに基づいて該類似度を判定する
ことを特徴とする、請求項3記載の診断装置。 The compression means calculates a first weight for each neuron when compressing into the real neuron set;
The abnormal neuron set storage means calculates a second weight for each neuron when compressing the abnormal neuron set,
The similarity determination means determines the similarity based on the average value of the minimum Euclidean distance from each neuron constituting the real neuron set to each neuron constituting the abnormal neuron set, the first weight, and the second weight. The diagnostic apparatus according to claim 3, wherein:
ことを特徴とする、請求項3記載の診断装置。 4. The diagnostic apparatus according to claim 3, wherein the similarity determination means determines the similarity by calculating a Euclidean distance between the center of gravity of the real neuron set and the center of gravity of the abnormal neuron set.
該類似ニューロンセット選択手段が、該類似度演算方法設定手段で設定された該複数の異なる演算方法毎に、最も類似度の高い異常ニューロンセットを選択するとともに、
該状態診断手段が、該対象体における該異常状態を、該類似ニューロンセット選択手段における選択回数の最も多い該異常ニューロンセットに対応する種類の該異常状態であると診断する
ことを特徴とする、請求項2又は3記載の診断装置。 The diagnosis means has similarity calculation method setting means for setting a plurality of different calculation methods when determining the similarity in the similarity determination means,
The similar neuron set selection means selects an abnormal neuron set having the highest similarity for each of the plurality of different calculation methods set by the similarity calculation method setting means,
The state diagnosing means diagnoses the abnormal state in the object as the abnormal state of the type corresponding to the abnormal neuron set having the largest number of selections in the similar neuron set selecting means, The diagnostic device according to claim 2 or 3.
ことを特徴とする、請求項1〜15の何れか1項に記載の診断装置。 The diagnostic apparatus according to any one of claims 1 to 15, wherein the abnormal neuron set storage means updates or changes the abnormal neuron set using the actual data set.
該異常ニューロンセット記憶手段が、該未知異常状態判定手段において判定された該未知の異常状態に対応する該実データセットをニューラルネットワークの教師なし学習により圧縮した未知異常ニューロンセットを、該未知の異常状態の種類とともに新たに記憶する
ことを特徴とする、請求項16記載の診断装置。 An unknown abnormal state determination means for determining whether or not the state of the object corresponding to the actual data set is in an unknown abnormal state;
The abnormal neuron set storage unit compresses the unknown abnormal neuron set obtained by compressing the real data set corresponding to the unknown abnormal state determined by the unknown abnormal state determination unit by unsupervised learning of a neural network. The diagnostic apparatus according to claim 16, wherein the diagnostic apparatus newly stores the status type.
ことを特徴とする、請求項17記載の診断装置。 The unknown abnormal state determination means determines whether or not the object is in an unknown abnormal state based on a Euclidean distance between the actual data set and the abnormal neuron set. The diagnostic device described.
正常状態にある該対象体から、該対象体の該状態に応じて変動する複数のパラメータからなるデータを検出するとともに、複数の該データを正常データセットとして検出する正常データセット検出ステップと、
該正常データセットをニューラルネットワークの教師なし学習により圧縮した正常ニューロンセットを記憶する正常ニューロンセット記憶ステップと、
異常状態にある該対象体から、該複数のパラメータからなるデータを検出するとともに、複数の該データを異常データセットとして複数組検出する異常データセット検出ステップと、
複数組の該異常データセットをニューラルネットワークの教師なし学習により圧縮した異常ニューロンセットを、該異常状態の種類とともに複数組記憶する異常ニューロンセット記憶ステップと、
該対象体の該状態が未確定であるときに、該複数のパラメータからなるデータを検出するとともに、複数の該データを実データセットとして検出する実データセット検出ステップと、
該実データセットと該正常ニューロンセットとに基づいて、該対象体が正常状態にあるか否かを判定する正常状態判定ステップと、
該実データセットと該異常ニューロンセットとに基づいて、該対象体における該異常状態の種類を診断する診断ステップと
を備えたことを特徴とする、診断方法。 A diagnostic method for diagnosing the state of an object,
A normal data set detection step for detecting data consisting of a plurality of parameters that vary depending on the state of the target object from the target object in a normal state, and detecting a plurality of the data as a normal data set;
A normal neuron set storage step for storing a normal neuron set obtained by compressing the normal data set by unsupervised learning of a neural network;
An abnormal data set detection step for detecting a plurality of sets of the data as an abnormal data set while detecting data consisting of the plurality of parameters from the object in an abnormal state;
An abnormal neuron set storage step of storing a plurality of abnormal neuron sets obtained by compressing a plurality of abnormal data sets by unsupervised learning of a neural network together with the types of the abnormal states;
An actual data set detection step of detecting data consisting of the plurality of parameters when the state of the object is uncertain, and detecting the plurality of the data as an actual data set;
A normal state determination step for determining whether or not the object is in a normal state based on the actual data set and the normal neuron set;
A diagnostic method comprising: a diagnostic step of diagnosing the type of the abnormal state in the object based on the actual data set and the abnormal neuron set.
該実データセットと該異常ニューロンセットとの距離が小さいほど、該実データセットの該異常ニューロンセットに対する類似度が高いと判定する類似度判定ステップと、
該類似度判定ステップにおいて、該実データセットとの類似度が最も高いと判定された異常ニューロンセットを選択する類似ニューロンセット選択ステップと、
該対象体における該異常状態を、該類似ニューロンセット選択ステップで選択された該異常ニューロンセットに対応する種類の該異常状態であると診断する状態診断ステップとからなる
ことを特徴とする、請求項19記載の診断方法。 The diagnostic step comprises
A similarity determination step for determining that the smaller the distance between the actual data set and the abnormal neuron set, the higher the similarity between the actual data set and the abnormal neuron set;
In the similarity determination step, a similar neuron set selection step of selecting an abnormal neuron set determined to have the highest similarity with the actual data set;
The state diagnosis step comprises diagnosing the abnormal state in the object as a type of the abnormal state corresponding to the abnormal neuron set selected in the similar neuron set selection step. 19. The diagnostic method according to 19.
該診断ステップが、
該実ニューロンセットと該異常ニューロンセットとの距離が小さいほど、該実ニューロンセットの該異常ニューロンセットに対する類似度が高いと判定する類似度判定ステップと、
該類似度判定ステップにおいて、該実ニューロンセットとの類似度が最も高いと判定された異常ニューロンセットを選択する類似ニューロンセット選択ステップと、
該対象体における該異常状態を、該類似ニューロンセット選択ステップで選択された該異常ニューロンセットに対応する種類の該異常状態であると診断する状態診断ステップとからなる
ことを特徴とする、請求項19記載の診断方法。 A compression step of compressing the real data set into a real neuron set by unsupervised learning of a neural network;
The diagnostic step comprises
A similarity determination step for determining that the smaller the distance between the real neuron set and the abnormal neuron set, the higher the similarity between the real neuron set and the abnormal neuron set;
In the similarity determination step, a similar neuron set selection step of selecting an abnormal neuron set determined to have the highest similarity with the real neuron set;
The state diagnosis step comprises diagnosing the abnormal state in the object as a type of the abnormal state corresponding to the abnormal neuron set selected in the similar neuron set selection step. 19. The diagnostic method according to 19.
ことを特徴とする、請求項20記載の診断方法。 In the similarity determination step, the similarity is determined by calculating an average value of Euclidean distances between each data constituting the actual data set and each neuron constituting the abnormal neuron set. The diagnostic method according to claim 20.
該類似度判定ステップにおいて、該実データセットを構成する各データと該異常ニューロンセットを構成する各ニューロンとの間のユークリッド距離の平均値及び該ウェイトに基づいて該類似度を判定する
ことを特徴とする、請求項20記載の診断方法。 In the abnormal neuron set storage step, a weight for each neuron is calculated when compressing the abnormal neuron set,
In the similarity determination step, the similarity is determined based on an average value of Euclidean distance between each data constituting the actual data set and each neuron constituting the abnormal neuron set and the weight. The diagnostic method according to claim 20.
ことを特徴とする、請求項20記載の診断方法。 In the similarity determination step, the similarity is determined by calculating an average value of minimum Euclidean distances between each data constituting the actual data set and each neuron constituting the abnormal neuron set, The diagnostic method according to claim 20.
該類似度判定ステップにおいて、該実データセットを構成する各データと該異常ニューロンセットを構成する各ニューロンとの間の最小ユークリッド距離の平均値及び該ウェイトに基づいて該類似度を判定する
ことを特徴とする、請求項20記載の診断方法。 In the abnormal neuron set storage step, a weight for each neuron is calculated when compressing the abnormal neuron set,
Determining the similarity based on the average value of the minimum Euclidean distance between each data constituting the actual data set and each neuron constituting the abnormal neuron set and the weight in the similarity determination step; 21. The diagnostic method according to claim 20, characterized in.
ことを特徴とする、請求項20記載の診断方法。 21. The diagnosis method according to claim 20, wherein in the similarity determination step, the similarity is determined by calculating a Euclidean distance between the center of gravity of the actual data set and the center of gravity of the abnormal neuron set.
ことを特徴とする、請求項21記載の診断方法。 In the similarity determination step, the similarity is determined by calculating an average value of Euclidean distances of all pairs of each neuron constituting the real neuron set and each neuron constituting the abnormal neuron set. The diagnostic method according to claim 21.
該異常ニューロンセット記憶ステップにおいて、該異常ニューロンセットへの圧縮時に各ニューロン毎の第2ウェイトを演算し、
該類似度判定ステップにおいて、該実ニューロンセットを構成する各ニューロンと異常ニューロンセットを構成する各ニューロンとの全てのペアのユークリッド距離の平均値,該第1ウェイト及び該第2ウェイトに基づいて該類似度を判定する
ことを特徴とする、請求項21記載の診断方法。 In the compression step, a first weight for each neuron is calculated when compressing the real neuron set;
In the abnormal neuron set storage step, a second weight for each neuron is calculated at the time of compression to the abnormal neuron set,
In the similarity determination step, based on an average value of Euclidean distances of all pairs of each neuron constituting the real neuron set and each neuron constituting the abnormal neuron set, the first weight, and the second weight, The diagnosis method according to claim 21, wherein the similarity is determined.
ことを特徴とする、請求項21記載の診断方法。 In the similarity determination step, the similarity is determined by calculating an average value of minimum Euclidean distances from each neuron constituting the real neuron set to each neuron constituting the abnormal neuron set, The diagnostic method according to claim 21.
該類似度判定ステップにおいて、該実ニューロンセットを構成する各ニューロンから該異常ニューロンセットを構成する各ニューロンまでの最小ユークリッド距離の平均値及び該第1ウェイトに基づいて該類似度を判定する
ことを特徴とする、請求項21記載の診断方法。 In the compression step, storing a first weight for each neuron when compressing to the real neuron set;
Determining the similarity based on the average value of the minimum Euclidean distance from each neuron constituting the real neuron set to each neuron constituting the abnormal neuron set and the first weight in the similarity determining step; The diagnostic method according to claim 21, wherein the diagnostic method is characterized.
該異常データセット記憶ステップにおいて、該異常ニューロンセットへの圧縮時に各ニューロン毎の第2ウェイトを演算し、
該類似度判定ステップにおいて、該実ニューロンセットを構成する各ニューロンから該異常ニューロンセットを構成する各ニューロンまでの最小ユークリッド距離の平均値,該第1ウェイト及び該第2ウェイトに基づいて該類似度を判定する
ことを特徴とする、請求項21記載の診断方法。 In the compression step, a first weight for each neuron is calculated when compressing the real neuron set;
In the abnormal data set storing step, a second weight for each neuron is calculated at the time of compression to the abnormal neuron set,
In the similarity determination step, based on the average value of the minimum Euclidean distance from each neuron constituting the real neuron set to each neuron constituting the abnormal neuron set, the first weight, and the second weight, the similarity The diagnosis method according to claim 21, wherein: is determined.
ことを特徴とする、請求項21記載の診断方法。 The diagnosis method according to claim 21, wherein, in the similarity determination step, the similarity is determined by calculating a Euclidean distance between the center of gravity of the real neuron set and the center of gravity of the abnormal neuron set.
該類似ニューロンセット選択ステップにおいて、該実ニューロンセットとの類似度が最も高いと判定された異常ニューロンセットを複数回繰り返して選択し、
該状態診断ステップにおいて、該対象体における該異常状態を、該類似ニューロンセット選択ステップでの選択回数の最も多い該異常ニューロンセットに対応する種類の該異常状態であると診断する
ことを特徴とする、請求項20又は21記載の診断方法。 In the similarity determination step, by setting a plurality of different calculation methods, the similarity determination is repeated a plurality of times,
In the similar neuron set selection step, an abnormal neuron set determined to have the highest degree of similarity with the real neuron set is repeatedly selected several times,
In the state diagnosis step, the abnormal state in the object is diagnosed as the abnormal state of the type corresponding to the abnormal neuron set having the largest number of selections in the similar neuron set selection step. The diagnostic method according to claim 20 or 21.
ことを特徴とする、請求項19〜33の何れか1項に記載の診断方法。 The diagnostic method according to any one of claims 19 to 33, wherein in the abnormal neuron set storage step, the abnormal neuron set is updated or changed using the actual data set.
該異常ニューロンセット記憶ステップにおいて、該未知異常状態判定ステップで判定された該未知の異常状態に対応する該実データセットをニューラルネットワークの教師なし学習により圧縮した未知異常ニューロンセットを、該未知の異常状態の種類とともに新たに記憶する
ことを特徴とする、請求項34記載の診断方法。 An unknown abnormal state determination step for determining whether or not the state of the object corresponding to the actual data set is in an unknown abnormal state;
In the abnormal neuron set storage step, an unknown abnormal neuron set obtained by compressing the real data set corresponding to the unknown abnormal state determined in the unknown abnormal state determination step by unsupervised learning of a neural network is converted into the unknown abnormal neuron set. 35. The diagnosis method according to claim 34, wherein the diagnosis method is newly stored together with the type of state.
ことを特徴とする、請求項35記載の診断方法。 36. In the unknown abnormal state determination step, it is determined whether or not the object is in an unknown abnormal state based on a Euclidean distance between the actual data set and the abnormal neuron set. The diagnostic method described.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006081628A JP2007257366A (en) | 2006-03-23 | 2006-03-23 | Diagnostic device and diagnostic method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2006081628A JP2007257366A (en) | 2006-03-23 | 2006-03-23 | Diagnostic device and diagnostic method |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007257366A true JP2007257366A (en) | 2007-10-04 |
Family
ID=38631538
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006081628A Pending JP2007257366A (en) | 2006-03-23 | 2006-03-23 | Diagnostic device and diagnostic method |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007257366A (en) |
Cited By (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010114701A (en) * | 2008-11-07 | 2010-05-20 | Ricoh Co Ltd | Set data discrimination method, failure prediction method, set data discriminating device, failure predicting device, and image forming apparatus |
| WO2011092830A1 (en) * | 2010-01-28 | 2011-08-04 | 日立建機株式会社 | Operation machine monitoring diagnosis device |
| JP2014015746A (en) * | 2012-06-13 | 2014-01-30 | Sumitomo Heavy Ind Ltd | Management device for shovel and abnormality detection method for the shovel |
| KR101857691B1 (en) * | 2016-10-17 | 2018-05-15 | 고려대학교 산학협력단 | Method and appratus for detecting anomaly of vehicle based on euclidean distance measure |
| JP2019028901A (en) * | 2017-08-03 | 2019-02-21 | 株式会社toor | State determination device, state determination method and state determination program |
| JP2019079089A (en) * | 2017-10-20 | 2019-05-23 | 株式会社日立製作所 | Diagnostic system |
| KR20190111230A (en) * | 2018-03-22 | 2019-10-02 | 경원기계공업(주) | Remaining operating life prediction device for air compressors |
| JP6647461B1 (en) * | 2019-03-08 | 2020-02-14 | 三菱電機株式会社 | Failure diagnosis system, failure prediction method, and failure prediction program |
| WO2020110718A1 (en) * | 2018-11-30 | 2020-06-04 | いすゞ自動車株式会社 | Model creation device, model creation method, and program |
| WO2020162136A1 (en) * | 2019-02-08 | 2020-08-13 | コベルコ建機株式会社 | Damage estimation device and machine learning device |
| WO2021053717A1 (en) * | 2019-09-17 | 2021-03-25 | 日産自動車株式会社 | Anomaly determination device and anomaly determination method |
| WO2021193396A1 (en) * | 2020-03-27 | 2021-09-30 | 住友重機械工業株式会社 | Shovel management device, shovel management system, shovel support device, and shovel |
| JP2022027657A (en) * | 2020-07-29 | 2022-02-10 | 株式会社新日本コンサルタント | Manhole pump abnormality detection method |
| JP2022027684A (en) * | 2020-07-29 | 2022-02-14 | 株式会社新日本コンサルタント | Method for detecting abnormality in manhole pump in advance |
| CN115790723A (en) * | 2023-02-06 | 2023-03-14 | 山东中都机器有限公司 | Sewage purification abnormity detection method |
Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05333079A (en) * | 1992-06-02 | 1993-12-17 | Mitsubishi Electric Corp | Surveillance diagnosis device |
-
2006
- 2006-03-23 JP JP2006081628A patent/JP2007257366A/en active Pending
Patent Citations (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05333079A (en) * | 1992-06-02 | 1993-12-17 | Mitsubishi Electric Corp | Surveillance diagnosis device |
Cited By (30)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010114701A (en) * | 2008-11-07 | 2010-05-20 | Ricoh Co Ltd | Set data discrimination method, failure prediction method, set data discriminating device, failure predicting device, and image forming apparatus |
| WO2011092830A1 (en) * | 2010-01-28 | 2011-08-04 | 日立建機株式会社 | Operation machine monitoring diagnosis device |
| JP5220929B2 (en) * | 2010-01-28 | 2013-06-26 | 日立建機株式会社 | Work machine monitoring and diagnosis device |
| US8838324B2 (en) | 2010-01-28 | 2014-09-16 | Hitachi Construction Machinery Co., Ltd. | Monitoring and diagnosing device for working machine |
| JP2014015746A (en) * | 2012-06-13 | 2014-01-30 | Sumitomo Heavy Ind Ltd | Management device for shovel and abnormality detection method for the shovel |
| KR101857691B1 (en) * | 2016-10-17 | 2018-05-15 | 고려대학교 산학협력단 | Method and appratus for detecting anomaly of vehicle based on euclidean distance measure |
| JP2019028901A (en) * | 2017-08-03 | 2019-02-21 | 株式会社toor | State determination device, state determination method and state determination program |
| US10621028B2 (en) | 2017-08-03 | 2020-04-14 | Toor Inc. | State determining device, state determining method, and state determining program |
| JP2019079089A (en) * | 2017-10-20 | 2019-05-23 | 株式会社日立製作所 | Diagnostic system |
| KR20190111230A (en) * | 2018-03-22 | 2019-10-02 | 경원기계공업(주) | Remaining operating life prediction device for air compressors |
| KR102046645B1 (en) * | 2018-03-22 | 2019-11-19 | 경원기계공업(주) | Remaining operating life prediction device for air compressors |
| CN113168172B (en) * | 2018-11-30 | 2024-02-23 | 五十铃自动车株式会社 | Model generation device, model generation method, and program |
| WO2020110718A1 (en) * | 2018-11-30 | 2020-06-04 | いすゞ自動車株式会社 | Model creation device, model creation method, and program |
| CN113168172A (en) * | 2018-11-30 | 2021-07-23 | 五十铃自动车株式会社 | Model generation device, model generation method, and program |
| JP2020128656A (en) * | 2019-02-08 | 2020-08-27 | コベルコ建機株式会社 | Damage estimation device and machine learning device |
| JP7206985B2 (en) | 2019-02-08 | 2023-01-18 | コベルコ建機株式会社 | Damage estimation device and machine learning device |
| WO2020162136A1 (en) * | 2019-02-08 | 2020-08-13 | コベルコ建機株式会社 | Damage estimation device and machine learning device |
| JP6647461B1 (en) * | 2019-03-08 | 2020-02-14 | 三菱電機株式会社 | Failure diagnosis system, failure prediction method, and failure prediction program |
| WO2020183539A1 (en) * | 2019-03-08 | 2020-09-17 | 三菱電機株式会社 | Breakdown diagnosis system, prediction rule generation method, and prediction rule generation program |
| US11604458B2 (en) | 2019-09-17 | 2023-03-14 | Nissan Motor Co., Ltd. | Anomaly determination device and anomaly determination method |
| JPWO2021053717A1 (en) * | 2019-09-17 | 2021-03-25 | ||
| JP7396361B2 (en) | 2019-09-17 | 2023-12-12 | 日産自動車株式会社 | Abnormality determination device and abnormality determination method |
| WO2021053717A1 (en) * | 2019-09-17 | 2021-03-25 | 日産自動車株式会社 | Anomaly determination device and anomaly determination method |
| WO2021193396A1 (en) * | 2020-03-27 | 2021-09-30 | 住友重機械工業株式会社 | Shovel management device, shovel management system, shovel support device, and shovel |
| JP2022027657A (en) * | 2020-07-29 | 2022-02-10 | 株式会社新日本コンサルタント | Manhole pump abnormality detection method |
| JP2022027684A (en) * | 2020-07-29 | 2022-02-14 | 株式会社新日本コンサルタント | Method for detecting abnormality in manhole pump in advance |
| JP7332185B2 (en) | 2020-07-29 | 2023-08-23 | NiXJAPAN株式会社 | Manhole pump abnormality detection method |
| JP7431390B2 (en) | 2020-07-29 | 2024-02-15 | NiX JAPAN株式会社 | Manhole pump abnormality detection method |
| CN115790723A (en) * | 2023-02-06 | 2023-03-14 | 山东中都机器有限公司 | Sewage purification abnormity detection method |
| CN115790723B (en) * | 2023-02-06 | 2023-06-06 | 山东中都机器有限公司 | Sewage purification abnormality detection method |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2007257366A (en) | Diagnostic device and diagnostic method | |
| JP4133627B2 (en) | Construction machine state determination device, construction machine diagnosis device, construction machine state determination method, and construction machine diagnosis method | |
| JP4032045B2 (en) | DATA PROCESSING METHOD, DATA PROCESSING DEVICE, DIAGNOSIS METHOD, AND DIAGNOSIS DEVICE | |
| JP4175296B2 (en) | Construction machine data processing apparatus and construction machine data processing method | |
| EP1982301B1 (en) | Method of condition monitoring | |
| CN104573845B (en) | Information system equipment state overhauling aid decision-making method | |
| Sharma et al. | Integrated framework to optimize RAM and cost decisions in a process plant | |
| CN108604360A (en) | Facility method for monitoring abnormality and its system | |
| CN107991870A (en) | A kind of fault pre-alarming and life-span prediction method of Escalator equipment | |
| Safiyullah et al. | Prediction on performance degradation and maintenance of centrifugal gas compressors using genetic programming | |
| CN108027611B (en) | Decision assistance system and method for machine maintenance using expert opinion supervised decision mode learning | |
| JP6711323B2 (en) | Abnormal state diagnosis method and abnormal state diagnosis device | |
| EP2682836B1 (en) | Method for performing diagnostics of a structure subject to loads and system for implementing said method | |
| WO2023065584A1 (en) | Method and apparatus for determining remaining service life of device, and electronic device | |
| CN114813105A (en) | Gear box fault early warning method and system based on working condition similarity evaluation | |
| CN112461543B (en) | Rotary machine fault diagnosis method based on multi-classification support vector data description | |
| CN110703743A (en) | Equipment failure prediction and detection system and method | |
| CN116186946B (en) | Hydraulic system fault diagnosis method and system based on diagnosis model | |
| CN115114822A (en) | Method and system for estimating residual service life of underwater throttle valve based on digital twinning | |
| WO2016016956A1 (en) | Device degradation cause estimation method and device | |
| CN111259494B (en) | Health monitoring and analyzing method for heavy machine equipment | |
| CN115238394A (en) | Composite material structure multi-source uncertainty mixed reliability digital twin modeling method | |
| CN111061191B (en) | Distributed oil-gas storage tank remote operation and maintenance method | |
| CN116235121A (en) | Apparatus and method for identifying anomalies in industrial facilities for performing a production process | |
| CN117605627B (en) | System and method for detecting oil leakage of core body of wind power gear box cooler |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080326 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20080326 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A821 Effective date: 20080326 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20081127 |
|
| A711 | Notification of change in applicant |
Free format text: JAPANESE INTERMEDIATE CODE: A711 Effective date: 20100713 |
|
| RD02 | Notification of acceptance of power of attorney |
Free format text: JAPANESE INTERMEDIATE CODE: A7422 Effective date: 20100812 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20111220 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20120612 |