JP2007120667A - Tripod-type constant velocity universal joint - Google Patents
Tripod-type constant velocity universal joint Download PDFInfo
- Publication number
- JP2007120667A JP2007120667A JP2005315127A JP2005315127A JP2007120667A JP 2007120667 A JP2007120667 A JP 2007120667A JP 2005315127 A JP2005315127 A JP 2005315127A JP 2005315127 A JP2005315127 A JP 2005315127A JP 2007120667 A JP2007120667 A JP 2007120667A
- Authority
- JP
- Japan
- Prior art keywords
- roller
- universal joint
- constant velocity
- velocity universal
- tripod
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images









Abstract
Description
この発明はトリポード型等速自在継手に関するもので、自動車や各種産業機械の動力伝達用に利用することができる。 The present invention relates to a tripod type constant velocity universal joint and can be used for power transmission of automobiles and various industrial machines.
特許文献1には、トリポード型等速自在継手の外輪を内側外筒と外側外筒と両者間に介在する防振材との組み合わせで構成し、内側外筒と外側外筒のいずれか一方の面に、両者間の間隙を狭める方向に突出した干渉部を設けることが記載されている。 In Patent Document 1, an outer ring of a tripod type constant velocity universal joint is configured by a combination of an inner outer cylinder, an outer outer cylinder, and a vibration isolating material interposed therebetween, and either one of the inner outer cylinder or the outer outer cylinder is used. It is described that the surface is provided with an interference portion protruding in the direction of narrowing the gap between them.
特許文献2には、トリポード型等速自在継手の外輪を内側外筒と外側外筒と両者間に介在する防振材との組み合わせで構成し、内側外筒と外側外筒の両端部に、両者間の間隙を狭める方向に突出した干渉部を設けることが記載されている。 In Patent Document 2, the outer ring of the tripod type constant velocity universal joint is configured by a combination of an inner outer cylinder, an outer outer cylinder, and a vibration isolating material interposed between both, and at both ends of the inner outer cylinder and the outer outer cylinder, It is described that an interference portion protruding in the direction of narrowing the gap between the two is provided.
特許文献3には、トリポード型等速自在継手の内径面の円周方向に干渉用突条を軸方向に沿って設け、内側外筒の外径面の周方向等分位置に各干渉用突条が回転方向に所要のすきまをおいてはまる干渉用嵌合溝を設け、干渉用突条相互間の外側外筒の内径面と干渉用突条相互間の内側外筒の外径面との間に防振材を介在させることが記載されている。
従来の、外輪を内側外筒と外側外筒の組み合わせにより構成して両者間に防振材を介在させたトリポード型等速自在継手の場合、防振材がトルクをせん断力で受けもつ構造となる。このせん断力は、防振材の加硫接着を剥がす要因となる。防振材の加硫接着が剥がれてしまうと、トルク伝達装置としてのトリポード型等速自在継手が所期の機能を発揮し得ないこととなる。 In the case of a conventional tripod type constant velocity universal joint in which the outer ring is composed of a combination of an inner outer cylinder and an outer outer cylinder, and a vibration isolating material is interposed between the two, Become. This shearing force becomes a factor that peels off the vulcanized adhesion of the vibration isolator. If the vulcanization adhesion of the vibration isolator is peeled off, the tripod type constant velocity universal joint as the torque transmission device cannot perform the intended function.
この発明の主要な目的は、防振材を剥がれにくくしてトリポード型等速自在継手の耐久性を向上させることにある。 The main object of the present invention is to improve the durability of the tripod type constant velocity universal joint by making it difficult to peel off the vibration isolator.
この発明は、トリポード型等速自在継手の外輪と脚軸との間のトルク伝達要素に防振材を組み込み、防振材のトルク負荷方向に変位する圧縮力でトルクを受けもたせる、言い換えれば、防振材を圧縮する方向にトルクを作用させることにより、課題を解決したものである。 This invention incorporates a vibration isolator into the torque transmission element between the outer ring of the tripod type constant velocity universal joint and the leg shaft, and gives a torque with a compressive force displaced in the torque load direction of the vibration isolator, in other words, The problem is solved by applying a torque in the direction of compressing the vibration isolator.
すなわち、この発明のトリポード型等速自在継手は、内周に3本のトラック溝を有する外方継手部材と、半径方向に突出した3本の脚軸を有する内方継手部材と、各脚軸に回転、軸方向移動、首振り自在に担持され外方継手部材のトラック溝内に収容されたトルク伝達要素とを具備し、前記トルク伝達要素に防振材を組み込んだことを特徴とするものである。 That is, the tripod type constant velocity universal joint of the present invention includes an outer joint member having three track grooves on the inner periphery, an inner joint member having three leg shafts protruding in the radial direction, and each leg shaft. And a torque transmission element that is supported so as to be rotatable, axially movable, and swingable, and is accommodated in a track groove of an outer joint member, and a vibration isolating material is incorporated in the torque transmission element. It is.
請求項2の発明は、請求項1のトリポード型等速自在継手において、前記トルク伝達要素が、ニードルローラを介して相対回転自在の外ローラと内ローラとからなり、前記外ローラまたは内ローラが、相互間に防振材を介在させた同心円状の2以上の筒体で構成されていることを特徴とするものである。 According to a second aspect of the present invention, in the tripod type constant velocity universal joint according to the first aspect, the torque transmission element includes an outer roller and an inner roller that are relatively rotatable via a needle roller, and the outer roller or the inner roller is Further, it is characterized by being composed of two or more concentric cylinders with a vibration isolating material interposed between them.
防振材は筒体間に圧入してもよく(請求項3)、あるいは、筒体に加硫接着してもよい(請求項4)。 The vibration isolator may be press-fitted between the cylinders (Claim 3), or may be vulcanized and bonded to the cylinders (Claim 4).
請求項5の発明は、請求項1ないし4のいずれかのトリポード型等速自在継手において、過大な負荷を受け持つ干渉用突条を設けたことを特徴とするものである。 According to a fifth aspect of the present invention, in the tripod type constant velocity universal joint according to any one of the first to fourth aspects, an interference protrusion that handles an excessive load is provided.
請求項6の発明は、請求項5のトリポード型等速自在継手において、前記干渉用突条を前記外ローラまたは前記内ローラに一体的に設けたことを特徴とするものである。 The invention according to claim 6 is the tripod type constant velocity universal joint according to claim 5, wherein the interference protrusion is provided integrally with the outer roller or the inner roller.
請求項7の発明は、請求項5のトリポード型等速自在継手において、前記干渉用突条を外ローラと内ローラとの間に介在させたことを特徴とするものである。 A seventh aspect of the invention is the tripod type constant velocity universal joint according to the fifth aspect, wherein the interference protrusion is interposed between the outer roller and the inner roller.
請求項8の発明は、請求項1のトリポード型等速自在継手において、前記トルク伝達要素が、ニードルローラを介して相対回転自在の外ローラと内ローラとからなり、前記外ローラもしくは前記内ローラまたは両方を構成する材料を防振材としたことを特徴とするものである。 The invention according to claim 8 is the tripod type constant velocity universal joint according to claim 1, wherein the torque transmitting element is composed of an outer roller and an inner roller that are relatively rotatable via a needle roller, and the outer roller or the inner roller Or the material which comprises both is made into the vibration isolator, It is characterized by the above-mentioned.
この発明によれば、トリポード型等速自在継手の外輪と脚軸との間のトルク伝達要素に防振材を組み込むことにより、防振材を圧縮する方向にトルクが作用し、防振材が伝達トルクを圧縮力で受けもつことができるため、防振材が剥がれにくくなる。したがって、この発明によれば、トリポード型等速自在継手の耐久性が向上する。 According to the present invention, by incorporating the vibration isolator into the torque transmission element between the outer ring and the leg shaft of the tripod type constant velocity universal joint, torque acts in the direction of compressing the vibration isolator, Since the transmission torque can be handled by the compressive force, the vibration isolator is difficult to peel off. Therefore, according to the present invention, the durability of the tripod constant velocity universal joint is improved.
以下、図面に従ってこの発明の実施の形態を説明する。 Embodiments of the present invention will be described below with reference to the drawings.
まず、図9および図10を参照してトリポード型等速自在継手の基本構成を説明する。 First, the basic configuration of the tripod constant velocity universal joint will be described with reference to FIGS. 9 and 10.
図示するように、トリポード型等速自在継手は、外方継手部材としての外輪10と、内方継手部材としてのトリポード20と、トルク伝達要素としてのローラアセンブリ30を主要な構成要素として成り立っている。連結すべき2軸の一方を外輪10と接続し、他方をトリポード20と接続する。
As shown in the figure, the tripod type constant velocity universal joint includes an
図示する実施の形態では、外輪10は筒部と軸部とからなり、筒部は一端にて開口したカップ状である。筒部の内周には、円周三等分位置に3つのトラック溝12が形成してある。トラック溝12は軸方向に延びており、各トラック溝12の両側壁はローラ案内面14となっている。
In the illustrated embodiment, the
トリポード20はセレーション(またはスプライン。以下同じ。)孔26を形成したボス22と、ボス22の円周三等分位置から半径方向に突出した脚軸24とからなる。各脚軸24はローラアセンブリ30を担持している。
The
ローラアセンブリ30は外ローラ32と内ローラ34とからなる。すなわち、外ローラ32と内ローラ34は複数のニードルローラ36を介してユニット化され、相対回転可能なローラアセンブリを構成している。ローラアセンブリ30は外輪10のトラック溝12内に収容され、外ローラ34がローラ案内面14に沿って転動可能である。ローラ案内面14は外ローラ32の外周面に適合する凹曲面である。たとえば、ローラ案内面14を軸線が外輪10の軸線と平行な円筒面の一部で構成し、その断面形状を外ローラ32の外周面の母線に対応する円弧とする。
The
あるいは、外ローラ32の外周面を脚軸24の軸線から半径方向に離れた位置に曲率中心をもった円弧を母線とする凸曲面(トーラス面)とし、ローラ案内面14の断面形状はゴシックアーチ形状とする。これにより、外ローラ32の外周面とローラ案内面14とがアンギュラコンタクトをなす。球状の外ローラ外周面に対してローラ案内面14の断面形状をテーパ形状としても両者のアンギュラコンタクトが実現する。このように、外ローラ32の外周面とローラ案内面14とがアンギュラコンタクトをなす構成を採用することによって、ローラが振れにくくなるため姿勢が安定する。
Alternatively, the outer peripheral surface of the
内ローラ34は脚軸24の外周面に外嵌している。内ローラ34の円筒形外周面を内側軌道面とし、外ローラ32の円筒形内周面を外側軌道面として、これらの内外軌道面間にニードルローラ36が転動自在に介在する。図10(B)に示すように、ニードルローラ36は、できるだけ多くのころを入れた、保持器のない、いわゆる総ころ状態で組み込んである。符号38で指してあるのはニードルローラ36の抜け落ち止めのためのワッシャで、外ローラ32の端部内周面に形成した環状溝に装着してある。
The
脚軸24の外周面は、縦断面(図9)で見ると脚軸24の軸線と平行なストレート形状であり、横断面(図10(A))で見ると、長軸が継手の軸線と直交する略楕円状である。脚軸の横断面形状は、トリポード20の軸方向で見た肉厚を減少させた略楕円状である。言い換えれば、脚軸の横断面形状は、トリポードの軸方向で互いに向き合った面が相互方向に、つまり、仮想円筒面よりも小径側に退避している。そのような形状の一具体例として略楕円状が挙げられる。略楕円状とは、字義どおりの楕円形のほか、一般に卵形、小判形などと称される形状も含まれる。これにより、脚軸24は、継手の軸線と直交する方向で内ローラ34の内周面と接触し、継手の軸線方向で内ローラ34の内周面との間にすきまを形成する。
The outer peripheral surface of the
内ローラ34の内周面は円弧状凸断面を有する。すなわち、内周面の母線が半径rの凸円弧である(図10(C))。このことと、脚軸24の横断面形状が上述のように略楕円状であり、脚軸24と内ローラ34との間には所定のすきまが設けてあることから、内ローラ34は脚軸24の軸方向への移動が可能であるばかりでなく、脚軸24に対して首振り自在である。また、上述のとおり、内ローラ34と外ローラ32はニードルローラ36を介して相対回転自在にユニット化してあるため、脚軸24に対し、内ローラ34と外ローラ32がユニットとして首振り可能な関係にある。ここで、首振りとは、脚軸24の軸線を含む平面内で、脚軸24の軸線に対してローラアセンブリ(32,34)の軸線が傾くことをいう(図9参照)。
The inner peripheral surface of the
この実施の形態では、脚軸24の横断面形状を上述のようにしたことにより、継手が作動角をとったとき(図9)、ローラアセンブリの姿勢を変えることなく、脚軸24が外輪10に対して傾くことができる。また、内ローラ34の内周面が円弧状凸断面であることから、図10(C)に破線で示すように、両者の接触楕円が点に近いものとなり、同時に面積も小さくなる。したがって、ローラアセンブリ(32,34,36)を傾かせようとする摩擦モーメントが非常に低減する。また、ローラアセンブリの姿勢が常に安定し、ローラがローラ案内面と平行に保持されるため円滑に転動することができる。これにより、誘起スラストおよびスライド抵抗が低減し、かつ、それらの値のばらつきも小さくなる。
In this embodiment, since the cross-sectional shape of the
図11に示すトリポード型等速自在継手は、同じくダブルローラタイプであるが、脚軸24を球状にして、ローラアセンブリ30(32,34,36)の首振りは脚軸24と内ローラ34との間で行わせ、軸方向移動は外ローラ32と内ローラ34との間で行わせるようにしたものである。
The tripod type constant velocity universal joint shown in FIG. 11 is also a double roller type, but the
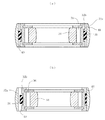
次に、図1を参照すると、ローラアセンブリ30の外ローラ32が同心円状の外側の筒体32aと内側の筒体32bに分割してあり、両者(32a,32b)間に防振材38が介在させてある。防振材38はゴムその他の弾性材料で形成してあり、筒体32a,32b間に圧入するか、加硫接着してある。
Next, referring to FIG. 1, the
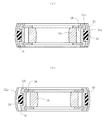
図2に示すように、内ローラ34を同心円状の筒体34a,34bに分割し、両者(34a,34b)間に防振材38を介在させてもよい。図面に例示したように内外2つの筒体に分割するほか、3以上の筒体に分割することもできる。また、外ローラ32と内ローラ34の両方に防振材38を組み込むことも可能であるが、少なくともどちらか一方に防振材38を組み込むことにより、外輪10と脚軸24との間の動力伝達経路でダンピング機能を発揮させることができる。
As shown in FIG. 2, the
図3に示す実施の形態は、ニードルローラ36を防振材で形成したものである。この場合も、外輪10と脚軸24との間の動力伝達経路でダンピング機能を発揮させることができる。
In the embodiment shown in FIG. 3, the
図4〜8は、図1の実施の形態の変形例に相当し、過大なトルクを防振材38に代わって負担する干渉用突条40を設けたものである。なお、図4〜8において、各図の右側の図(b)が過大トルク負荷時を示す。
4 to 8 correspond to modifications of the embodiment of FIG. 1, and are provided with an
図4〜6に示す変形例は、内ローラ34の外周面に干渉用突条40が設けてある。すなわち、内ローラ34の外周面に環状溝を形成することにより、環状溝の両側に残った部分を干渉用突条40として利用する。この場合、防振材38は環状溝内にある。たとえばゴム製の防振材を環状溝の底面に加硫接着する。
In the modified examples shown in FIGS. 4 to 6, the
図4の変形例の場合、外ローラ32の外側筒体32aの内周面と内側筒体32bの外周面が円筒面である。したがって、過大トルク負荷時には、図4(b)に示すように、外側筒体32aの内周面と内側筒体32bの外周面とが円筒面同士で干渉して、防振材38の異常変形を防止する。
In the modification of FIG. 4, the inner peripheral surface of the
図5の変形例の場合、外ローラ32の外側筒体32aの内周面と内側筒体32bの外周面が部分球面である。言い換えれば、外側筒体32aの内周面の母線および内側筒体32bの外周面の母線が中心軸線上に曲率中心をもった円弧である。したがって、過大トルク負荷時には、図5(b)に示すように、外側筒体32aの内周面と内側筒体32bの外周面とが球面同士で干渉する。
In the modification of FIG. 5, the inner peripheral surface of the outer
図6の変形例の場合、外側筒体32aの内周面と内側筒体32bの外周面が円環状曲面(トーラス面)である。この場合、外側筒体32aの内周面の母線および内側筒体32bの外周面の母線は円弧であるが、曲率中心が中心軸線から離れた点に位置している。したがって、過大トルク負荷時には、図6(b)に示すように、外側筒体32aの内周面と内側筒体32bの外周面とが円環状曲面同士で干渉して、防振材38の異常変形を防止する。
In the modification of FIG. 6, the inner peripheral surface of the
図7に示す変形例では、外ローラ32の外側筒体32aの内周面に干渉用突条40が設けてある。すなわち、外側筒体32aの内周面に環状溝を設けることにより、環状溝の両側に残った内周面を干渉用突条40としてある。そして、その環状溝に防振材38が取り付けてある。外側筒体32aの内周面と内側筒体32bの外周面は円筒面である。したがって、過大トルク負荷時には、図7(b)に示すように、外側筒体32aの内周面(=干渉用突条40)と内側筒体32bの外周面とが円筒面同士で干渉して、防振材38の異常変形を防止する。
In the modification shown in FIG. 7, the
図8に示す変形例の場合、外ローラ32の外側筒体32aの内周面と内側筒体32bの外周面がいずれも円筒面で、両者(32a,32b)間にリング状をした別体の干渉用突条40が介在させてある。ここでは内側筒体32b側に干渉用突条40を装着した場合が例示してあり、内側筒体32bの外周面に環状溝を形成して抜け止め用の止め輪33が装着してある。ここでも、過大トルク負荷時には、図8(b)に示すように、外側筒体32aの内周面と干渉用突条40とが円筒面同士で干渉して、防振材38の異常変形を防止する。
In the case of the modification shown in FIG. 8, the inner peripheral surface of the outer
図3の実施の形態を除き、防振材38は、全周にわたって挿入してもよく、あるいは、分割して挿入してもよい。
Except for the embodiment of FIG. 3, the
10 外輪(外方継手部材)
12 トラック溝
14 ローラ案内面
20 トリポード(内方継手部材)
22 ボス
24 脚軸
26 セレーション孔
30 ローラアセンブリ(トルク伝達要素)
32 外ローラ
32a 外側筒体
32b 内側筒体
34 内ローラ
34a 外側筒体
34b 内側筒体
36 ニードルローラ
33 ワッシャ
38 防振材
40 干渉用突条
10 Outer ring (outer joint member)
12
22
32
Claims (8)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005315127A JP2007120667A (en) | 2005-10-28 | 2005-10-28 | Tripod-type constant velocity universal joint |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005315127A JP2007120667A (en) | 2005-10-28 | 2005-10-28 | Tripod-type constant velocity universal joint |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2007120667A true JP2007120667A (en) | 2007-05-17 |
Family
ID=38144730
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005315127A Withdrawn JP2007120667A (en) | 2005-10-28 | 2005-10-28 | Tripod-type constant velocity universal joint |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2007120667A (en) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010281357A (en) * | 2009-06-03 | 2010-12-16 | Jtekt Corp | Sliding tripod type constant velocity joint |
| DE102007054563B4 (en) * | 2007-11-15 | 2014-12-18 | Volkswagen Ag | tripod |
| DE102016222521A1 (en) * | 2016-11-16 | 2018-05-17 | Volkswagen Aktiengesellschaft | tripod |
| CN110107610A (en) * | 2019-04-30 | 2019-08-09 | 安徽理工大学 | Submissive constant moment of force shaft coupling |
-
2005
- 2005-10-28 JP JP2005315127A patent/JP2007120667A/en not_active Withdrawn
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102007054563B4 (en) * | 2007-11-15 | 2014-12-18 | Volkswagen Ag | tripod |
| JP2010281357A (en) * | 2009-06-03 | 2010-12-16 | Jtekt Corp | Sliding tripod type constant velocity joint |
| DE102016222521A1 (en) * | 2016-11-16 | 2018-05-17 | Volkswagen Aktiengesellschaft | tripod |
| CN110107610A (en) * | 2019-04-30 | 2019-08-09 | 安徽理工大学 | Submissive constant moment of force shaft coupling |
| CN110107610B (en) * | 2019-04-30 | 2020-06-05 | 安徽理工大学 | Flexible constant moment coupling |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2007120667A (en) | Tripod-type constant velocity universal joint | |
| JP4527581B2 (en) | Constant velocity universal joint with boots | |
| JP4794867B2 (en) | Constant velocity universal joint with boots | |
| JP2008261391A (en) | Tripod type constant velocity universal joint | |
| JP2005133917A (en) | Isolation pulley | |
| WO2006085418A1 (en) | Constant velocity universal joint and boot for the same | |
| JP4255678B2 (en) | Tripod type constant velocity universal joint | |
| JP2007120666A (en) | Tripod-type constant velocity universal joint | |
| JP2004257418A (en) | Tripod uniform velocity universal joint | |
| JP4946473B2 (en) | Ball type constant velocity joint | |
| JP3821914B2 (en) | Elastic shaft coupling | |
| JP2007120664A (en) | Tripod-type constant velocity universal joint | |
| JP2006258122A (en) | Slide type constant velocity universal joint | |
| JP2007211804A (en) | Constant velocity universal joint | |
| JP2012013207A (en) | Tripod type constant velocity joint | |
| JP2008215518A (en) | Sliding system constant velocity universal joint | |
| JP2009014179A (en) | Tripod-type constant velocity universal joint | |
| JP2007120543A (en) | Tripod-type constant velocity universal joint | |
| JP2007263235A (en) | Constant velocity universal joint | |
| JP2006283831A (en) | Constant velocity universal joint | |
| JP4178613B2 (en) | Tripod type constant velocity joint | |
| JP2017020581A (en) | Ball bearing for pull-type clutch release bearing device | |
| JP2017061990A (en) | Boot for constant velocity universal joint and constant velocity universal joint having the same | |
| JP2004116690A (en) | Spider universal joint | |
| JP2004068871A (en) | Cross shaft joint |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Withdrawal of application because of no request for examination |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20090106 |