JP2006296448A - 低周波治療器用導子及び低周波治療器 - Google Patents
低周波治療器用導子及び低周波治療器 Download PDFInfo
- Publication number
- JP2006296448A JP2006296448A JP2005117883A JP2005117883A JP2006296448A JP 2006296448 A JP2006296448 A JP 2006296448A JP 2005117883 A JP2005117883 A JP 2005117883A JP 2005117883 A JP2005117883 A JP 2005117883A JP 2006296448 A JP2006296448 A JP 2006296448A
- Authority
- JP
- Japan
- Prior art keywords
- conductor
- pad
- conductor pad
- low
- rotation
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images



Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H15/00—Massage by means of rollers, balls, e.g. inflatable, chains, or roller chains
- A61H15/0092—Massage by means of rollers, balls, e.g. inflatable, chains, or roller chains hand-held
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61H—PHYSICAL THERAPY APPARATUS, e.g. DEVICES FOR LOCATING OR STIMULATING REFLEX POINTS IN THE BODY; ARTIFICIAL RESPIRATION; MASSAGE; BATHING DEVICES FOR SPECIAL THERAPEUTIC OR HYGIENIC PURPOSES OR SPECIFIC PARTS OF THE BODY
- A61H15/00—Massage by means of rollers, balls, e.g. inflatable, chains, or roller chains
- A61H2015/0007—Massage by means of rollers, balls, e.g. inflatable, chains, or roller chains with balls or rollers rotating about their own axis
- A61H2015/0028—Massage by means of rollers, balls, e.g. inflatable, chains, or roller chains with balls or rollers rotating about their own axis disc-like, i.e. diameter substantially greater than width
Landscapes
- Health & Medical Sciences (AREA)
- Epidemiology (AREA)
- Pain & Pain Management (AREA)
- Physical Education & Sports Medicine (AREA)
- Rehabilitation Therapy (AREA)
- Life Sciences & Earth Sciences (AREA)
- Animal Behavior & Ethology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Electrotherapy Devices (AREA)
- Apparatus For Radiation Diagnosis (AREA)
Abstract
【課題】 様々な患部にも適切な押圧力で固定でき、未使用時にはコンパクトに収納することが可能な低周波治療器用導子及びそれを備えた低周波治療器を提供する。
【解決手段】 導子2は、弾性支持アーム65と、弾性支持アーム65の両端部に設けられた回動支持部10,20によりそれぞれ回動自在に支持された導子パッド60,61とを備える。導子パッド60は、短手方向と長手方向の長さを持つ長円形状であり、導子パッド60側の回動支持機構は、使用時には、長手方向が弾性支持アーム65の延伸方向と略直交するように回動位置を保持し、未使用時には、長手方向が弾性支持アーム65の延伸方向に略揃うように回動位置を保持する。導子パッド61側の回動支持機構は、導子パッド61と回動支持部20との間の距離が最小の位置から最大の位置まで、導子パッド61を回動により移動させることができる構造を有する。
【選択図】 図1
【解決手段】 導子2は、弾性支持アーム65と、弾性支持アーム65の両端部に設けられた回動支持部10,20によりそれぞれ回動自在に支持された導子パッド60,61とを備える。導子パッド60は、短手方向と長手方向の長さを持つ長円形状であり、導子パッド60側の回動支持機構は、使用時には、長手方向が弾性支持アーム65の延伸方向と略直交するように回動位置を保持し、未使用時には、長手方向が弾性支持アーム65の延伸方向に略揃うように回動位置を保持する。導子パッド61側の回動支持機構は、導子パッド61と回動支持部20との間の距離が最小の位置から最大の位置まで、導子パッド61を回動により移動させることができる構造を有する。
【選択図】 図1
Description
本発明は、低周波治療器用導子及びそれを備えた低周波治療器に関する。
従来の低周波治療器は、U字状の弾性支持体と、この弾性支持体の両端部に取り付けられた導子パッドとを備える導子を用いるものがある。このような導子として、U字状のアーム部材の両端に導子(導子パッド)の一対を互いに対向する並列状に連結して構成した治療器用導子体がある(例えば、特許文献1参照)。この特許文献1では、アーム部材を伸縮自在に構成することで、人体の各部位に容易に導子を密着できるようにしている。
また、弾性弧状体の両端部に備えた座体の保持部にボールジョイント手段を介して導子(導子パッド)を担持した座体を保持した導子固定具がある(例えば、特許文献2参照)。この特許文献2では、ボールジョイント手段により弾性弧状体を全方位にわたって傾けることができる他に、一方又は両方の導子を弾性弧状体に沿って上下に移動させることが開示され、それらにより、人体の所定部位に導子を容易に且つ安定して固定できるようにしている。
更に、弾性の支持体に一対の導子(導子パッド)を取り付け、両導子の間隔を人体頸部の板状筋の間隔(70±10mm)に合わせた低周波治療器がある(例えば、特許文献3参照)。この特許文献3では、導子を支持体に設けた軸の回りに回転自在とすること、導子を支持体に対して突出する方向に可動とすることが開示されている。
特開平10−118198号公報
特開平5−146515号公報
特開平11−178937号公報
特許文献1記載の技術では、U字状のアーム部材を伸縮させることでアーム部材の長さは調整でき、特許文献2記載の技術では、一対の導子を全方位に傾けたり、一方又は両方の導子の弾性弧状体に対する固定位置を変えることができ、特許文献3記載の技術では、両導子を回転させたり、導子を支持体から突出する方向に移動させたりすることはできるが、いずれの技術も、導子を人体部位に装着したときに互いに対向する一対の導子間の距離の相違については、アーム部材(弾性弧状体、支持体)の弾性による変形で吸収するしかないため、凹凸があったり、形状が異なったり、領域が広狭であったりする人体の様々な部位に導子を確実に密着させて固定することができず、また、アーム部材の弾性による変形に依存するために、狭い患部では導子の押圧力が低過ぎ、逆に広い患部では導子の押圧力が高過ぎることとなり、適切な押圧力で導子を患部に固定することができない。
また、上記特許文献1〜3に記載された一対の導子(導子パッド)は、いずれも同形状、同サイズであり、しかも導子の幅がアーム部材(弾性弧状体、支持体)の幅と略同じである。このため、人体との接触面積をより広く確保した導子、取り分け幅の広い導子を用いると、収納時の占有空間が非常に大きくなり、より大きな収納スペースを要することになる。
この発明は、そのような問題点に着目してなされたもので、様々な患部にも適切な押圧力で固定でき、未使用時にはコンパクトに収納することが可能な低周波治療器用導子を提供することを目的とする。
前記目的を達成するために、本発明の低周波治療器用導子は、U字状の弾性支持体と、この弾性支持体の両端部に取り付けられた導子パッドとを備えるものにおいて、少なくとも一方の導子パッドを当該導子パッドの患部当接面と交差する方向を軸として回動自在に支持する回動支持機構を備えることを特徴とする。
この導子において、回動支持機構は、導子パッドの回動に伴い当該導子パッドの患部当接面と当該導子パッドに対応する弾性支持体端部との距離が変化する構造であることが好ましい。
また、少なくとも一方の導子パッドは、短手方向と長手方向の長さを持つ形状であり、回動支持機構は、導子パッドの長手方向が弾性支持体の延伸方向に略揃うように導子パッドの回動位置を保持することが好ましい。
更に、回動支持機構は、導子パッドの回動範囲が約180°であり、その回動範囲の略中間が上記導子パッドの長手方向が弾性支持体の延伸方向に略揃う位置に相当し、回動範囲の一方限が導子パッドの患部当接面と当該導子パッドに対応する弾性支持体端部との距離が最大になる位置に相当し、回動範囲の他方限が導子パッドの患部当接面と当該導子パッドに対応する弾性支持体端部との距離が最小になる位置に相当することが好ましい。
また、本発明の低周波治療器は、上記のような低周波治療器用導子を備えることを特徴とする。
本発明(請求項1記載の発明)によれば、様々な患部にも適切な押圧力で固定でき、未使用時にはコンパクトに収納することができる。
請求項2記載の発明によれば、様々な領域・形状の患部に対する導子パッドの貼着適応性が向上する。
請求項3記載の発明によれば、使用時には広範囲の患部を治療でき、未使用時にはコンパクトに収納できる。
請求項4記載の発明によれば、未使用位置(収納状態)、一対の導子パッドの間隔が最小の状態、又は一対の導子パッドの間隔が最大の状態に導子パッドの位置を簡単に変えることができる。
以下、本発明を実施の形態に基づいて説明する。
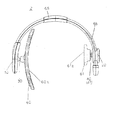
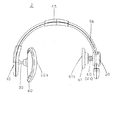
その一実施形態に係る低周波治療器用導子を図1〜図4に示す。図1は正面図、図2は右側面図である。また、図3及び図4は、図1に示した状態に対して、導子パッド60を90°回転させるとともに導子パッド61を導子パッド60側に移動させて一対の導子パッド60,61の間隔を狭くした状態を示しており、図3が正面図、図4が右側面図である。
この導子2は、U字状の弾性支持アーム(弾性支持体)65と、この弾性支持アーム65の一端部に設けられた回動支持部10に支持された大サイズの導子パッド60と、弾性支持アーム65の他端部に設けられた回動支持部20に支持された小サイズの導子パッド61とを備える。導子パッド60はパッド領域の大きな患部当接面60aを有し、導子パッド61はパッド領域の小さな患部当接面61aを有する。患部当接面60a,61aの面積比は例えば8:1である。導子パッド60,61を大小のサイズとすることで、特に小サイズの導子パッド61においては、低周波電流の密度を高めることができる。
導子パッド60は、短手方向と長手方向の長さを持つ長円形状であり、人体患部(例えばひざ、腰、肩)の曲面に適応しやすいように患部当接面60aが凹面状であり、これに応じて全体の形状も緩やかに湾曲している。
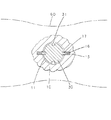
また、導子パッド60は、患部当接面60aと交差する方向を軸として回動支持機構により回動自在に支持されている。回動支持機構は、図5に概略拡大断面図で示すような構造である。この構造では、導子パッド60の裏側に設けられた支軸部30が回動支持部10に形成された軸孔11に回動可能に挿通されている。支軸部30には、等角度間隔(90°)で4つの穴31が形成され、この穴31に対応する回動支持部10の部分には、2つの配置穴15が180°間隔で形成され、配置穴15にはバネ16とボール(鋼球)17が配置されている。バネ16は、一端部が当該配置穴15の内壁に係合し、他端部がボール17に取り付けられている。ボール17はバネ16により支軸部30側に常時付勢され、支軸部30の穴31が対面すると、穴31に嵌まり込み、嵌まり込んだ状態から支軸部30が適度の力で回動されると、支軸部30に押されて配置穴15内に引っ込むようになっている。
この導子パッド60側の回動支持機構は、回動支持部10の配置穴15、バネ16、ボール17、支軸部30の穴31で構成される。但し、配置穴15、バネ16、ボール17を支軸部30に設け、穴31を回動支持部10に設けてもよい。
導子パッド60側の回動支持機構によると、図3及び図4に示す導子パッド60の使用時には、回動支持機構は、導子パッド60の長手方向が弾性支持アーム65の延伸方向と略直交するように導子パッド60の回動位置を保持する。すなわち、この場合は図5に示すように、導子パッド60の支軸部30の一対の穴31がボール17に対面するので、ボール17がバネ16の付勢により穴31に嵌まり込み、図3及び図4に示す導子パッド60の状態が保持される。
これに対して、図1及び図2に示す導子パッド60の未使用時(導子パッド60を図3及び図4の状態から90°回転させたとき)には、回動支持機構は、導子パッド60の長手方向が弾性支持アーム65の延伸方向に略揃うように導子パッド60の回動位置を保持する。この場合は図5を参照すると、導子パッド60の支軸部30の別の一対の穴31がボール17に対面するので、ボール17がバネ16の付勢により穴31に嵌まり込み、図1及び図2に示す導子パッド60の状態が保持される。この状態では、導子2をコンパクトに収納できる。なお、人体への適用部位によっては、図1及び図2に示す導子パッド60の状態で使用しても構わない。
上記導子パッド60側の回動支持機構では、導子パッド60を90°回転させるたびに、導子パッド60の位置が保持されるが、例えば、導子パッド60を180°回動させることが可能な長さの2条の螺旋状溝を回動支持部10に形成し、各螺旋状溝の一端部、他端部、一端部と他端部との間の中間部の3箇所に、支軸部30側の一対のボールが嵌まる凹部を形成し、各3箇所で導子パッド60の位置が保持されるようにしてもよい。
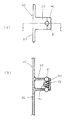
この場合の回動支持機構の具体的な構造例を図6〜図8に示す。図6の(a)は導子パッド60の支軸部30の側面図、図6の(b)は同(a)のA−A線における断面図、図7の(a)は回動支持部10の要部側面図、図7の(b)は同(a)のB−B線における断面図、図8は支軸部30に取り付けられるキャップ90〔一方向から見た側面図(a)、別方向から見た側面図(b)、斜視図(c)〕を示す。
図6において、導子パッド60のベース80に設けられた支軸部30は中空円柱状であり、その先端は開口し、先端に2箇所のボール突出用円弧窓が180°間隔で形成され、この支軸部30の開口にキャップ90が固設されている。
キャップ90は、図8に示すように中空の円柱形状であり、一端には底面が形成されている。底面が形成されていない他端側には、支軸部30の先端と同様に、2箇所のボール突出用円弧窓91が180°間隔で形成されている。従って、支軸部30にキャップ90を取り付けると、支軸部30及びキャップ90の双方のボール突出用円弧窓が整合し、2つの円形のボール突出用円弧窓が形成される。また、キャップ90の底面から他端側に向かって、一対のバネ押さえ92が突設されており、その先端は互いに内側に屈曲している。
キャップ90には、支軸部30の先端に固設される前に、2個のボール81と1個のコイルバネ82が組み込まれる。ボール81は上述したボール突出用円弧窓の円弧部の半径より大きな半径を有しており、その一部が円弧窓から露出するように組み込まれる。すなわち、ボール81は、その一部が円弧窓から突出可能であるが、円弧窓から外側に完全に出てしまわない。また、コイルバネ82は、2個のボール81の間に設けられ、キャップ90のバネ押さえ92によって位置決めされる。この状態で、コイルバネ82は2個のボール81を外側に向かって付勢する。
このボール81とコイルバネ82が組み込まれたキャップ90を、当該キャップ90と支軸部30の互いのボール突出用円弧窓が向かい合う位置で支軸部30の先端に固設することにより、支軸部30は、ボール突出用円弧窓から出没自在な球面を2個備えることとなる。
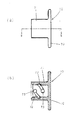
図7において、回動支持部10のベース70には、中空の円柱部71が形成されている。円柱部71の内径は、支軸部30が挿入され、かつ回動できるように設定されている。この円柱部71の内壁には、2条の螺旋状溝72が180°間隔で形成されている。各螺旋状溝72は、両端間で半回転する角度に、また両端間の距離が一対の導子パッド60,61の間隔の調整しろに相当するような長さに設定されている。また、各螺旋状溝72は、円柱部71内に支軸部30を挿入したときに、支軸部30の2個のボール81を、コイルバネ82の付勢に抗して支軸部30内に若干押し込むような曲率と深さに設定されている。更に、各螺旋状溝72の両端部及び中間部の合計3箇所に、当該螺旋状溝より曲率が小さく、かつ深さが深いボール係合凹部73が設けられている。
この回動支持機構によると、導子パッド60の支軸部30の2個のボール81が回動支持部10の円柱部71の2条の螺旋状溝72に嵌まるように位置決めして、支軸部30を円柱部71内に挿入し、2個のボール81がボール係合凹部73に嵌まる位置となるように導子パッド60を回転させる。螺旋状溝72の中間部に設けた凹部73にボール81が嵌まったときは、導子パッド60の長手方向が弾性支持アーム65の延伸方向と一致するため(図1及び図2の状態)、低周波治療器を使用しないときの導子2の収納スペースが小さくなる。
この位置からボール81が円柱部71の先端側に移動するように導子パッド60を回転させ、先端側の凹部73にボール81が嵌まったときは、導子パッド60の長手方向が弾性支持アーム65の延伸方向とは直交する向きとなり(図3及び図4の状態)、かつ一対の導子パッド60,61の間隔が狭い状態(導子パッド60の患部当接面60aと回動支持部10との距離が最大の位置)に設定される。
逆に、ボール81が円柱部71の根元側に移動するように導子パッド60を回転させ、根元側の凹部73にボール81が嵌まったときは、導子パッド60の長手方向が弾性支持アーム65の延伸方向とは直交する向きとなり(図3及び図4の状態)、かつ一対の導子パッド60,61の間隔が広い状態(導子パッド60の患部当接面60aと回動支持部10との距離が最小の位置)に設定される。
この回動支持機構を用いれば、後記導子パッド61と同様に、導子パッド60によっても一対の導子パッド60,61の間隔を調整することができ、より調整範囲が広くなる。
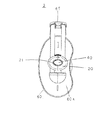
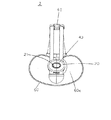
一方、導子パッド61は、通常サイズの円形状であり、患部当接面61aが平坦である。この導子パッド61は、患部当接面61aと交差する方向を軸として回動支持機構により回動自在に支持されている。回動支持機構は図1〜図4に示すような構造である。この構造によると、導子パッド61の裏側に設けられた支軸部40が回動支持部20に形成された軸孔21に回動可能に挿通されている。支軸部40には雄ネジ41が形成され、これに対応して軸孔21には雌ネジ(図示せず)が形成されている。
この導子パッド61側の回動支持機構は、回動支持部20の軸孔21、雌ネジ、支軸部40の雄ネジ41で構成される。
導子パッド61側の回動支持機構によると、導子パッド61の患部当接面61aと導子パッド61に対応する弾性支持アーム65の端部(回動支持部20)との距離が最小の位置(図1及び図2の状態)から、患部当接面61aと回動支持部20との距離が最大の位置(図3及び図4の状態)まで、導子パッド61を回動により移動させることができる。この導子パッド61の回動支持部20からの距離を変えることで、一対の導子パッド60,61の間隔を調整できる。
また、回動支持部20は、弾性支持アーム65に沿って固定位置を調整できるように構成されている。ここでは、図1〜図4に示すように、弾性支持アーム65の端部側部に複数の凹部68が形成され、この凹部68に嵌合する凸部(図示せず)が回動支持部20に設けられており、回動支持部20を弾性支持アーム65に沿って或る程度の力でスライド移動させ、凸部が嵌合する凹部68を選定することで、弾性支持アーム65に対する導子パッド61の固定位置を調整できる。
このように構成した導子2は、図1〜図4には示されていないが、一対の導子パッド60,61に接続されたコードが導出され、コードの先端にプラグ63(図10)が設けられており、プラグ63を後記低周波治療器の本体1のジャック59に差し込んで使用する。低周波治療時には、導子2の導子パッド60,61を人体の患部(ひざ、腰、肩等)に装着する。このとき、患部の大きさ、形状等に応じて、導子パッド60の回転位置、弾性支持アーム65に対する導子パッド61の固定位置、及び回動支持部20からの導子パッド61の距離をそれぞれ調整することで、一対の導子パッド60,61を様々な患部に密着して装着することができる。
上記導子2を接続する低周波治療器の一例として、その本体の平面図(上面図)を図9の(a)に、その正面図を図9の(b)に示す。
この低周波治療器は、低周波電流を生成し出力する本体1を備える。本体1は、その表面に、電源オン・オフするための電源スイッチ52と、後記導子貼着検知回路57により検知された導子2の人体への貼着有無、後記導子接続検知回路58により検知された導子2の本体1への接続有無等の情報を表示する表示器53と、低周波電流の出力を調整するための出力調整ダイヤル55とを有し、その側面に、導子2のプラグ63を差し込むためのジャック59を有する。出力調整ダイヤル55は、電源スイッチ52により電源オンすると、自動的に表面から突出し、回転操作可能となるように構成されている。
本体1と導子2を備えた低周波治療器の構成例のブロック図を図10に示す。本体1は、CPU50と、電源部51と、電源スイッチ52と、表示器53と、出力回路54と、出力調整ダイヤル55と、ダイヤル昇降機構56と、導子貼着検知回路57と、導子接続検知回路58と、ジャック59とを備えている。
CPU50は、予め記憶部(図示せず)に記憶するプログラムに従い、治療のための種々の演算・制御・処理を実行する。電源部51は、電池及びACアダプタにより、回路各部に電源電圧を供給する。電源スイッチ52は、ボタン操作により、ワンタッチ毎に電源部51から回路各部への電源供給をON/OFFする。
表示器53は、LCD(液晶表示器)が使用され、上記情報の他に治療処理を実行中に種々の報知内容を表示する。出力回路54は、治療のための低周波信号を発生し、かつ高圧出力し、導子2が本体1に接続された状態で、一対の導子パッド60,61を通して人体患部に低周波電流を通電する。出力調整ダイヤル55は、出力回路54から出力される低周波信号のレベル(強さ)を調整するためのボリュウムのダイヤルである。ダイヤル昇降機構56は、電源オンしたときに出力調整ダイヤル55を上昇させて、出力調整ダイヤル55を回転操作可能とし、電源オフしたときに出力調整ダイヤル55を下降させて、出力調整ダイヤル55の回転操作を禁止するための機構である。
導子貼着検知回路57は、導子2の導子パッド60,61が人体に貼着されたか否かを検知する回路である。この導子貼着検知回路57は、出力回路54の低周波電流がジャック59、プラグ63を介して、導子パッド60,61間に通電された場合、その通電電流を検出して所定値以上のときに導子パッド60,61の貼着有りと検知し、通電電流が検出されないときに、導子パッド60,61の貼着無しと検知する。導子接続検知回路58は、導子2のプラグ63が本体1のジャック59に接続されて、導子パッド60,61が本体1に接続されたか否かを検知する回路である。
なお、上記実施形態では、導子2は大小の導子パッド60,61を備えているが、同形状、同サイズの導子パッドでもよい。
1 低周波治療器の本体
2 導子
10 大サイズの導子パッド側の回動支持部
20 小サイズの導子パッド側の回動支持部
30 大サイズの導子パッドの支軸部
40 小サイズの導子パッドの支軸部
60 大サイズの導子パッド
60a 大サイズの導子パッドの患部当接面
61 小サイズの導子パッド
61a 小サイズの導子パッドの患部当接面
65 弾性支持アーム(弾性支持体)
2 導子
10 大サイズの導子パッド側の回動支持部
20 小サイズの導子パッド側の回動支持部
30 大サイズの導子パッドの支軸部
40 小サイズの導子パッドの支軸部
60 大サイズの導子パッド
60a 大サイズの導子パッドの患部当接面
61 小サイズの導子パッド
61a 小サイズの導子パッドの患部当接面
65 弾性支持アーム(弾性支持体)
Claims (5)
- U字状の弾性支持体と、この弾性支持体の両端部に取り付けられた導子パッドとを備える低周波治療器用導子において、
少なくとも一方の導子パッドを当該導子パッドの患部当接面と交差する方向を軸として回動自在に支持する回動支持機構を備えることを特徴とする低周波治療器用導子。 - 前記回動支持機構は、導子パッドの回動に伴い当該導子パッドの患部当接面と当該導子パッドに対応する弾性支持体端部との距離が変化する構造であることを特徴とする請求項1記載の低周波治療器用導子。
- 少なくとも一方の導子パッドは、短手方向と長手方向の長さを持つ形状であり、前記回動支持機構は、導子パッドの長手方向が弾性支持体の延伸方向に略揃うように導子パッドの回動位置を保持することを特徴とする請求項1又は請求項2記載の低周波治療器用導子。
- 前記回動支持機構は、導子パッドの回動範囲が約180°であり、その回動範囲の略中間が前記導子パッドの長手方向が弾性支持体の延伸方向に略揃う位置に相当し、回動範囲の一方限が導子パッドの患部当接面と当該導子パッドに対応する弾性支持体端部との距離が最大になる位置に相当し、回動範囲の他方限が導子パッドの患部当接面と当該導子パッドに対応する弾性支持体端部との距離が最小になる位置に相当することを特徴とする請求項3記載の低周波治療器用導子。
- 請求項1から請求項4のいずれかに記載の低周波治療器用導子を備えた低周波治療器。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005117883A JP2006296448A (ja) | 2005-04-15 | 2005-04-15 | 低周波治療器用導子及び低周波治療器 |
| CNA2006800120897A CN101160150A (zh) | 2005-04-15 | 2006-04-06 | 低频治疗仪用电极片及低频治疗仪 |
| PCT/JP2006/307372 WO2006112273A1 (ja) | 2005-04-15 | 2006-04-06 | 低周波治療器用導子及び低周波治療器 |
| TW095112778A TW200702011A (en) | 2005-04-15 | 2006-04-11 | Conductors for low-frequency curer and low-frequency curer |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005117883A JP2006296448A (ja) | 2005-04-15 | 2005-04-15 | 低周波治療器用導子及び低周波治療器 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006296448A true JP2006296448A (ja) | 2006-11-02 |
| JP2006296448A5 JP2006296448A5 (ja) | 2008-05-15 |
Family
ID=37115000
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005117883A Pending JP2006296448A (ja) | 2005-04-15 | 2005-04-15 | 低周波治療器用導子及び低周波治療器 |
Country Status (4)
| Country | Link |
|---|---|
| JP (1) | JP2006296448A (ja) |
| CN (1) | CN101160150A (ja) |
| TW (1) | TW200702011A (ja) |
| WO (1) | WO2006112273A1 (ja) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6268608B2 (ja) * | 2014-12-05 | 2018-01-31 | パナソニックIpマネジメント株式会社 | 低周波治療器およびそのパッド |
| JP6760135B2 (ja) * | 2017-03-02 | 2020-09-23 | オムロンヘルスケア株式会社 | 低周波治療器、低周波治療器用の本体、および、低周波治療器用のパッドとホルダとの組み合わせ |
| CN108187224A (zh) * | 2018-01-21 | 2018-06-22 | 李华荣 | 一种旋转式理疗电极 |
| CN110339478B (zh) * | 2019-07-16 | 2023-02-03 | 陈大为 | 高血压治疗仪 |
| CN111558133B (zh) * | 2019-12-31 | 2021-12-03 | 未来穿戴技术有限公司 | 颈部按摩仪 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05146515A (ja) * | 1991-11-29 | 1993-06-15 | Teijin Ltd | 導子固定具 |
| JP2000084092A (ja) * | 1999-10-08 | 2000-03-28 | Matsushita Electric Works Ltd | 低周波治療器 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS5482622U (ja) * | 1977-11-22 | 1979-06-12 |
-
2005
- 2005-04-15 JP JP2005117883A patent/JP2006296448A/ja active Pending
-
2006
- 2006-04-06 WO PCT/JP2006/307372 patent/WO2006112273A1/ja active Application Filing
- 2006-04-06 CN CNA2006800120897A patent/CN101160150A/zh active Pending
- 2006-04-11 TW TW095112778A patent/TW200702011A/zh unknown
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH05146515A (ja) * | 1991-11-29 | 1993-06-15 | Teijin Ltd | 導子固定具 |
| JP2000084092A (ja) * | 1999-10-08 | 2000-03-28 | Matsushita Electric Works Ltd | 低周波治療器 |
Also Published As
| Publication number | Publication date |
|---|---|
| TW200702011A (en) | 2007-01-16 |
| WO2006112273A1 (ja) | 2006-10-26 |
| CN101160150A (zh) | 2008-04-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP2006296448A (ja) | 低周波治療器用導子及び低周波治療器 | |
| AU2013261606B2 (en) | Lighting device | |
| TW201735891A (zh) | 美容器 | |
| JP2008506170A (ja) | コンピュータ入力デバイス | |
| EP2001207B1 (en) | Desktop charger holder | |
| JP2005242284A (ja) | 携帯式情報表示装置の高さ調整装置 | |
| US20080207042A1 (en) | Connector for Wearable Electronics | |
| WO2005027982A3 (en) | Surgical support arm docking apparatus | |
| KR100619885B1 (ko) | 회전식 플러그가 구비된 어댑터 | |
| WO2023193603A1 (zh) | 一种美容仪器 | |
| CN108357242B (zh) | 一种可弯折手机笔 | |
| KR101890193B1 (ko) | 콤파스 | |
| JP2019025318A (ja) | 車椅子、及び該車椅子に用いられるフットレスト装置 | |
| CN201061981Y (zh) | 显示器结构 | |
| CN218978354U (zh) | 一种镜面可调节的化妆柜 | |
| CN219207135U (zh) | 一种医用套扎器 | |
| JP4146845B2 (ja) | 情報端末のコネクティング構造 | |
| CN219557538U (zh) | 一种导航装置及手术工具组件 | |
| JP2001016753A (ja) | スイベルユニット | |
| CN218938793U (zh) | 一种灯具 | |
| CN211186306U (zh) | 一种可伸缩式防近视坐姿矫正仪 | |
| KR20010035722A (ko) | 엘시디 모니터의 높이조절이 가능한 피벗장치 | |
| EP4071397A1 (en) | Freely rotatable and telescopic intelligent arm | |
| JP3031574U (ja) | 額帯電灯 | |
| CN116367472A (zh) | 一种附件设备 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20080401 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20080401 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20101214 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20110412 |