JP2006278316A - リボンビームで半導体ウエハのシリーズ処理するための放射走査アーム及びコリメータ - Google Patents
リボンビームで半導体ウエハのシリーズ処理するための放射走査アーム及びコリメータ Download PDFInfo
- Publication number
- JP2006278316A JP2006278316A JP2006025000A JP2006025000A JP2006278316A JP 2006278316 A JP2006278316 A JP 2006278316A JP 2006025000 A JP2006025000 A JP 2006025000A JP 2006025000 A JP2006025000 A JP 2006025000A JP 2006278316 A JP2006278316 A JP 2006278316A
- Authority
- JP
- Japan
- Prior art keywords
- workpiece
- pivot
- axis
- ion beam
- arm
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Landscapes
- Physical Vapour Deposition (AREA)
Abstract
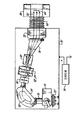
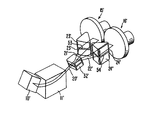
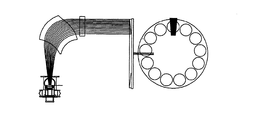
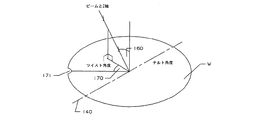
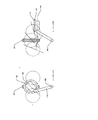
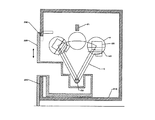
【解決手段】ウェハは、第1のピボット150に接続され途中で曲げられたアーム110の一端に第2のピボット140によって取り付けられたウェハホルダ120に載置される。ウェハは第2のピボットによって任意の角度にチルトされ、かつ第1のピボットによって円弧状に機械的走査される。電流密度を第1のピボットからの距離に比例させたリボンビーム20をコリメータによって形成し、ウェハに照射することにより均一な注入を行なう。
【選択図】図6
Description
本発明は、“走査ビームを用いた半導体ウエハのシリーズ処理のための放射走査アーム及びコリメータ”と題する、2004年2月6日に出願された米国仮特許出願第60/542,570号の主題として最初に出願された。
本発明は、添付の図面と共に考察すると、より容易に理解され且つより良く評価される。
1.本発明は、アーク形状パスでビームを通過するようにウエハを走査する。
2.本発明は、ビームとウエハの表面に対する垂線との間の角度を0°と45°を大幅に超える角度との間で調節する手段を提供する。
3.本発明は、ウエハ平面を横切るビームの入射角度における走査依存性変化を排除する。
4.本発明は、ウエハホルダを水平位置へ傾けてウエハのローディング及びアンローディングを、好ましくは、イオンビーム位置から及びその上方にシールドされる位置で可能とする従来の手段を提供する。
5.本発明は、リボンビーム強度を補正してアーク形状のパスの中心からの距離でウエハ走査速度の半径方向変化を補償し、それによって、ウエハの表面上の全てのポイントに対する均一な線量を提供する。
6.本発明は、比較的短いアームと低質量移動部品を提供し、それによって、迅速な減速と加速がより低い電力モータ及びより少ない機械的ストレスで達成されることが出来る。
7.本発明は、標準の、コンパクトな、低コストの回転機構の使用が可能となり、そこでは、スライディングシールや高価な線形ドライブが無く、全てのベアリングが真空外に配置され、それによって、コストを減少し、信頼性を向上し、且つウエハの汚染を回避する。
言語のあいまいさを回避し且つ本発明の明確で正確な理解を提供するために、一セットの技術用語と適切な定義を以下に提供する。これらの技術用語と適切な定義は、専門用語と本発明の詳細を適切に記述する言語を制御する性質があり、以降において繰り返し且つ一貫性を持って使用される。
本発明の主題は、種々なタイプのリボンイオンビーム、平行及び非平行、連続又は走査タイプのものでのインプランテーションに適用可能であり、且つ空間におけるシステムの向きの変動が可能であることも評価されるべきである。汎用性が失われないことは、特定の例での用語“走査された”“垂直な”“水平な”“振り子”の使用によって意図されている。
Claims (11)
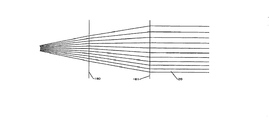
- 平坦なプレーナワークピースのイオンインプラント装置であって、当該装置は、望ましいスピーシーズのイオンビームを発生する手段と、イオンビームをコリメートして、長手軸に平行に移動すると共に主横軸に沿う長手寸法と副横軸に沿う短手寸法を有する平行リボンビームを形成するエネルギー手段とを備え;ビームに隣接すると共に前記長手軸に平行なピボット軸を有する第1のピボットに取り付けられ、前記長手軸と前記主横軸を含む平面内又はそれに近接して配置されるアームを備え;平行リボンビームの電流密度を制御し、この密度を前記第1のピボットの軸からの距離に比例させる手段を備え、インプラントされるべきワークピースのためのチャックが前記第1のピボットに対して傾斜された軸を有する第2のピボットによって前記アームに取り付けられ、そこで、インプラントされるべきワークピースが、前記チャックに取り付けられ、前記第2のピボットを調節してビーム方向に対して望ましい角度にワークピースの表面を傾斜させる手段を備え、アームをある角度を通過するように回転する手段を備え、それによって、望ましい角速度で、アーク形状パス上でリボンイオンビームを通過するようにワークピースを移動し、ワークピースのプレーナ表面に望ましい実質的に均一な線量のイオンをインプラントするのに有効である、イオンインプラント装置。
- イオンビームをコリメートする前記手段は、リボンイオンビームの電流密度プロファイルを変更するように入口及び出口ポールエッジと磁界プロファイルが成形される磁石であり、それによって、ビームがワークピースに衝突する異なる位置での電流密度が、第1のピボット軸からの各位置の距離に比例する、請求項1に記載の装置。
- イオンビームをコリメートする前記手段と電流密度を制御する前記手段は、二つのレンズ又は電界又は磁界の領域よりなり、各々は、六極の電界又は磁界のコンポーネントを有し、前記コンポーネントは、イオンビームをコリメートすることとイオンビームがワークピースに衝突する位置でイオンビームの主横軸に沿って電流密度の線形変化を提供することの両方に有効である、請求項1に記載の装置。
- 前記第2のピボットの傾斜は、イオンビームがない位置で、ワークピースをチャックからロードし且つそれからアンロードするためにチャックを望ましい便利な向きに回転させるように選択され、この向きは、任意的に水平面である、請求項1に記載の装置。
- ワークピースのプレーナ表面に対して垂直な軸回りにチャックを回転するための手段が設けられる、請求項1に記載の装置。
- 前記チャックは、望ましい線量の50%がワークピースにインプラントされた時に、180°回転され、それによって、そうでない場合、リボンイオンビームの電流密度プロファイルから起こる線量の不均一なシステム的エラーを実質的に相殺する、請求項5に記載の装置。
- 一定のイオンビームを介してラスターパターンで2次元ワークピースを走査するための装置であって、当該装置は、ビーム軸に沿って移動する一定のイオンビームを発生するための手段を備え、ビーム軸に平行でありビームに隣接する前記ピボット軸を有する第1のピボットに取り付けられたアームを備え、アームを前記ピボット軸回りにある角度を通過するように回転する手段を備え、前記角度は、第1と第2の角度制限によって画定され、第1のピボットをビーム軸に垂直な方向へ平行移動し且つ第1と第2の角度制限間の角度を略二等分する手段を備え、第1のビポットに対して傾斜された軸を有する第2のピボットによって前記アームに取り付けられたインプラントされるべきワークピース用の支持体を備え、インプラントされるべきワークピースは、前記支持体に取り付けられ、前記第2のピボットは、ビーム方向に対して望ましき角度にワークピースの表面を傾斜するように調節され、次に固定され、ワークピースをある角度を通過するように回転して、それによって望ましい速度でアーク形状パス上をリボンイオンビームが通過するようにワークピースを移動すると共に、略直交する方向にピボット(第1のピボットか第2のピボットか不明?)をゆっくりと平行移動し、それによってイオンビームを通過するようにアーク形状ラスターパターン中にワークピースを移動させることによって、望ましい均一な線量のイオンでワークピースのプレーナ表面がインプラントされる装置。
- 第1のピボットの平行移動は、イオンビームの外側のアームによるワークピースの平行移動中のみの移動によって、有限インクリメントで達成される、請求項6に記載の装置。
- リボンイオンビームをワークピースにインプラントする方法であって、前記方法は、アームに取り付けられたチャックへ単一のワークピースを取り付けるステップを備え、このアームは、ワークピースがアーク形状パス中を移動され得るように第1のピボットへ取り付けられ;第1の軸に対して傾斜された第2の軸の回りに、ワークピースが、第1の軸に対して望ましい角度にその露出平面が保持される迄チャックを回転するステップを備え;リボンイオンビームを静電又は磁気レンズを通過させるステップを備え、静電界又は磁界は、イオン軌道を第1のピボット軸と略平行にするように成形され;一定の角速度でリボンイオンビーム中を通過するようにワークピースを移動するように第1のピボット回りにアームを回転して、それによって、均一な線量のイオンをワークピースにインプラントし、望ましい角度でワークピースにインプラントされる方法。
- 少なくとも二つのレンズ又は磁界又は電界の異なる形状の領域でビームを通過させるステップと;前記レンズの少なくとも一つを調節してその主軸に沿ってリボンイオンビームの電流密度を変更するステップと;同時にイオンビーム軌跡を第1のピボット軸に実質的に平行に維持するステップとを更に備え、それによって、イオンビームがワークピース表面に異なる位置で衝突すると、各位置の電流密度が、第1のピボット軸からの距離に比例する、請求項9に記載の方法。
- 一定のイオンビームでワークピースにインプラントする方法であって、単一のワークピースをアームに取り付けられたチャックに取り付けるステップを備え、ワークピースが、アーク形状のパスを移動され得るようにアームが、第1のピボットに取り付けられ、第1の軸に対して傾斜した第2の軸回りに、ワークピースの露出平面が第1の軸に対して望ましい角度であるようにワークピースが保持されるまで、ホルダを回転するステップを備え、アームを第1のピボット回りに回転して一定の角速度でアーク状のパスで走査されたイオンビームを通るようにワークピースを移動するステップを備え、イオンビームに対して垂直な方向で、ワークピースのアーク状運動の中間点に対して略垂直な方向に第1のピボットを平行移動するステップを備え、それによって、望ましい角度で均一な線量のイオンをワークピースにインプラントする方法。
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US11/049,264 US7057192B2 (en) | 2004-02-06 | 2005-02-02 | Radial scan arm and collimator for serial processing of semiconductor wafers with ribbon beams |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006278316A true JP2006278316A (ja) | 2006-10-12 |
| JP2006278316A5 JP2006278316A5 (ja) | 2006-11-24 |
Family
ID=37212834
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2006025000A Pending JP2006278316A (ja) | 2005-02-02 | 2006-02-01 | リボンビームで半導体ウエハのシリーズ処理するための放射走査アーム及びコリメータ |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2006278316A (ja) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20080116390A1 (en) * | 2006-11-17 | 2008-05-22 | Pyramid Technical Consultants, Inc. | Delivery of a Charged Particle Beam |
| JP2009081032A (ja) * | 2007-09-26 | 2009-04-16 | Axcelis Technologies Inc | リボン形ビームを用いたイオン注入クラスターツール |
| KR101035934B1 (ko) * | 2008-02-12 | 2011-05-23 | 닛신 이온기기 가부시기가이샤 | 이온 주입 방법 및 장치 |
| KR101751307B1 (ko) | 2011-11-02 | 2017-06-27 | 베리안 세미콘덕터 이큅먼트 어소시에이츠, 인크. | 고-스루풋 이온 주입기 |
| CN115763310A (zh) * | 2022-11-16 | 2023-03-07 | 浙江鑫钰新材料有限公司 | 一种离子注入装置及方法 |
-
2006
- 2006-02-01 JP JP2006025000A patent/JP2006278316A/ja active Pending
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20080116390A1 (en) * | 2006-11-17 | 2008-05-22 | Pyramid Technical Consultants, Inc. | Delivery of a Charged Particle Beam |
| JP2009081032A (ja) * | 2007-09-26 | 2009-04-16 | Axcelis Technologies Inc | リボン形ビームを用いたイオン注入クラスターツール |
| KR101035934B1 (ko) * | 2008-02-12 | 2011-05-23 | 닛신 이온기기 가부시기가이샤 | 이온 주입 방법 및 장치 |
| KR101751307B1 (ko) | 2011-11-02 | 2017-06-27 | 베리안 세미콘덕터 이큅먼트 어소시에이츠, 인크. | 고-스루풋 이온 주입기 |
| CN115763310A (zh) * | 2022-11-16 | 2023-03-07 | 浙江鑫钰新材料有限公司 | 一种离子注入装置及方法 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7057192B2 (en) | Radial scan arm and collimator for serial processing of semiconductor wafers with ribbon beams | |
| US6437351B1 (en) | Method and apparatus for controlling a workpiece in a vacuum chamber | |
| US8399851B2 (en) | Systems and methods for scanning a beam of charged particles | |
| US7982195B2 (en) | Controlled dose ion implantation | |
| JP2010508624A (ja) | イオン注入器用のメカニカルスキャナ | |
| KR101089404B1 (ko) | 선형 주사 모터를 이용하는 이온 빔 주입기의 조정 가능한주입각 공작물 지지 구조물 | |
| US7566886B2 (en) | Throughput enhancement for scanned beam ion implanters | |
| TWI443716B (zh) | 執行高傾斜植入的方法、離子植入裝置與植入工件的方法 | |
| JP5394483B2 (ja) | ビーム相補スリットの形状を、ビーム形状にマッチングさせることにより、粒子および汚染物質を減少させるためのシステムおよび方法 | |
| US7267520B2 (en) | Wafer scanning system with reciprocating rotary motion utilizing springs and counterweights | |
| US7692164B2 (en) | Dose uniformity correction technique | |
| JP2006278316A (ja) | リボンビームで半導体ウエハのシリーズ処理するための放射走査アーム及びコリメータ | |
| US6710360B2 (en) | Adjustable implantation angle workpiece support structure for an ion beam implanter | |
| US6900444B2 (en) | Adjustable implantation angle workpiece support structure for an ion beam implanter | |
| US6774373B2 (en) | Adjustable implantation angle workpiece support structure for an ion beam implanter | |
| US6984832B2 (en) | Beam angle control in a batch ion implantation system | |
| CN114724993A (zh) | 半导体对准装置及半导体对准方法 | |
| US20080023654A1 (en) | Method of reducing transient wafer temperature during implantation | |
| Splinter et al. | Optima HD: single wafer mechanical scan ion implanter | |
| CN115917701A (zh) | 用于最小发散离子束的调整装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20060907 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20060907 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090526 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090602 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20090831 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20090910 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20091002 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20091007 |
|
| A601 | Written request for extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A601 Effective date: 20091102 |
|
| A602 | Written permission of extension of time |
Free format text: JAPANESE INTERMEDIATE CODE: A602 Effective date: 20091106 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20091201 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20100105 |