JP2006219114A - 液動監視装置付き船舶の動揺軽減装置 - Google Patents
液動監視装置付き船舶の動揺軽減装置 Download PDFInfo
- Publication number
- JP2006219114A JP2006219114A JP2005314215A JP2005314215A JP2006219114A JP 2006219114 A JP2006219114 A JP 2006219114A JP 2005314215 A JP2005314215 A JP 2005314215A JP 2005314215 A JP2005314215 A JP 2005314215A JP 2006219114 A JP2006219114 A JP 2006219114A
- Authority
- JP
- Japan
- Prior art keywords
- liquid
- information
- detection unit
- liquid movement
- movement
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images










Landscapes
- Measurement Of Levels Of Liquids Or Fluent Solid Materials (AREA)
Abstract
【解決手段】ART制御を自動的に成し得る構成に、液動情報をART制御に組み込んだARTコントロール部を構築する。 タンク内の液動を検知する液動検知部と、検知部から出力される液動情報を解読する情報処理部と、その情報を開示する表示器と、必要に応じて警報を出す手段と、その情報をARTコントロ−ル部へ送信する手段と、これらの情報を乗員が目視可能な液動監視装置を追加する。
【選択図】図1
Description
(a)船体横揺周期を使用するもの。
(b)液体の周期や流速、液面位置を使用するもの。
(c)前記の(a)と(b)を使用するもの。
例としての先行技術文献は、特公昭49−002749号公報(以下、特許文献1という)、特開昭61−036089号公報(以下、特許文献2という)、特許第1703217号公報(以下、特許文献3という)、特開平04−176790号公報(以下、特許文献4という)、特開平06−040381号公報(以下、特許文献5という)等がある
特許文献1は、液体の周期と液面位置を使用するもので、「水槽内部に液体の動揺周期を検出する装置と、液面を検出する装置と、動揺周期をあらかじめ設定された値と比較する装置などからなる」手段が記載されている。(特許請求範囲)
特許文献2は、船体の固有周期と液体周期を使用するもので、「舷側タンクの水の高さから船体の揺れ方向などを検出する検出器が設置され、この検出器の検出出力が制御装置に加えられるようになっている」旨の構成手段が記載されている。(2頁、右下欄、下から第12行〜第15行及び第1図)
特許文献3は、液体流速と船体傾斜角のそれぞれが0の時を基準とし制御しようとするもので、「ウォ−タダクト内に設置された流速検出器によって検出され、その流速検出信号は、制御バルブの開閉時間を制御する開閉制御装置に加えられる。 また、船体の傾斜角度は船体に取り付けられた傾斜検出器によって検出され、その検出信号は開閉制御装置に加えられる」(2頁、右下欄下から第6行) 特許文献4は、船体横揺周期を使用するもで、「船体の傾斜を検知する傾斜計と重心位置の近傍に船体のローリング時の傾斜を検出する傾斜センサーと、液流ダクト内部に流速センサーが取り付けてある。(図4の説明)
特許文献5は、船体横揺周期と液体周期を使用するもので、「船体の傾斜を検出する傾斜計とダクト内に設けた流速計と該両者の検出情報より両者の位相差を検出する演算回路と、該結果に基づいて弁の開閉を行う制御回路とから構成されている。」(段落「0009」)
尚、特許文献2及至5は、同一出願人による関連技術の改良発明によるもので技術的思想は類似していると思料する。
特許文献6は、船の平均横揺周期を基に最適な液体の位相遅れを得る制御グループを設定し制御する方法である。
特許文献7は、特許文献6の改良で、船速、舵角指令、風向風速などの情報を加味し、ARTの宿命的な欠点を解消する総合的な制御方法である。 尚、特許文献6、7の発明者は本願発明者と同一人物である。
特許文献8は、超音波センサー、超音波導波管、演算装置などからなる「超音波式液面計付き耐圧ガスボンベ」である。(請求項1) この文献は、本願発明の液動センサー部と同じような構成をしているが、単に液面を計測しているに過ぎず、液体周期などを検知する手段などは開示していない。
ARTの各機器は遠隔制御を可能とし、動揺計、さらに液動監視装置とを具備した液体の移動または停止、或いは減揺水槽固有周期の可変操作を自動的に成し得る減揺水槽を構成する。 そして、前記の構成に、タンク内の液動を検知する液動検知部と、検知部から出力される液動情報を解読する情報処理部と、その情報を開示する表示器と、必要に応じて警報を出す手段と、その情報をARTコントロ−ル部へ送信する手段からなる液動監視装置を追加する。
(1)実行している制御グループに合致したARTの液動が正常かを容易に把握できる。
(2)実行している制御グループが、船体周期に合致しているか否かをARTの液動状況から容易に把握できる。
(3)液動状況から、ARTコントロール部で制御しているバルブやダンパの開閉異常状況の不具合の有無などを監視することが可能となる。
(4)検出した平均液面の状況から、ART内の水漏れを把握できる。
(5)前述の状況から、場合によってはブザーや音声などで警報を発し、乗員による手動操作にての応急操作が可能となる。
これらから、目に見えないタンク内の損傷や不具合の発生を液動状況から把握する監視体制の強化によって、自動制御による誤操作の防止が可能となり、安全航海の担保と、乗員のARTに関する不安を解消することが可能となる。
図1は、本願発明の液動監視装置に係わる実施形態を示したシステムブロック図である。
図5は、本願発明に係わる減揺装置の概略構成を示した図である。
本願発明に於けるART本体は、図5に示すように、
船体の両舷に設定した一対の少なくとも2つのウイングタンク(3a,3b)と、これらウイングタンクの底部に液体を左右方向へ移動させる液体通路(2)で連結すると共に、前記のウイングタンク上部に液体の制動を目的としたバルブ(5)等の手段を介して連通させる空気ダクト(4)と、液体通路内に減揺水槽の固有周期の可変を目的としたダンパ(6)等の手段を設け、図示していないが、船の横揺角を検知し、その値を以て横揺れの単周期や平均横揺周期を演算し、更に制御信号等を出力するARTコントロール部と、バルブやダンパを駆動させる開閉機器装置部と、ART操作盤とを具備した、液体の移動または停止、或いは減揺水槽固有周期の可変操作を自動的に成し得る減揺水槽を構成する。
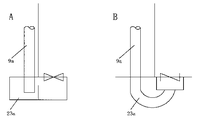
図7は、液体導入管(9a)(9b)の形状と設置の位置関係を示すタンクの横断面図を示す。図8は、図7のA−A縦断面を示す。図9は、液体導入管(9a)(9b)の下端部形状とビルジハット(水溜箱)(23a)(23b)の概要を示す図である。
液体導入管(9a)(9b)はその下端部を開放とし、タンク底板より下方になるように施されたビルジハット(水溜箱)(23a)(23b)内に適当な隙間を有して挿入する。 また、液体導入管(9a)(9b)内部は大気圧と同圧になるよう液体導入管(9a)(9b)の上部付近に枝状の空気抜き管(図示せず)を設け大気へ開放する。 そして、液動センサー(8a)(8b)は液体導入管(9a)(9b)の枝状の空気抜き管より頂部付近に設ける。
液動の検知部(11)は、1組の液動検知部を施せばある程度の目的を達成することができるが、精度を上げるには左右舷に少なくとも各1組を施す方が好ましく、その設置数を束縛するものではない。
このタイプのものは、発信から受信までの所用時間を1動作として、そのときの液面位置を算出するため、ある一定間隔の周期で測定動作が行われる。 例えば、あるメーカーの測定周期間隔は1秒が標準であるという。 当然のことながら、測定周期の間隔は短ければ短い程、精度の高い情報が得られる。
そこで、左右舷に設けた液体導入管内の液面の上下位置は、相対的に±逆ではあるがその絶対値はほぼ同じであることに着目し、船体水平時の液面高さを基準として、図2に示すような方法にてサインカーブ波形に変換させ、その値に基づく液動を次のような手段にて表示をする。
図3は、右舷器の第2検知部の測定状態を示したもので、左舷器の第1検知部の測定開始時のより0.5秒遅れて測定させ、1秒後の値S1、その1秒後の値S2を時系列的に計測しサインカーブ波形に変換させたものである。
図4は、第1検出部と第2検知部の絶対値を双方の空白域へ挿入してサインカーブ波形に変換させたものである。
このような手法を取り入れることで、お互いの計測空白域を補い液動状況をリアルタイムに表示することが可能である。
(1)簡易型表示の場合は、液動検知部、信号増幅部、表示部などからなる。
表示部は、図10に示すように、LED表示で、液面レベルはLEDによるバー表示、傾斜角は7セグメントLEDによる数値表示と、警報出力機能(ブザー)を有する。
(2)標準型の場合は、液動検知部、信号増幅部、表示部、通信処理部などからなる。 表示機能は簡易型と同等で、演算処理はARTの制御部を利用するタイプである。
(3)高機能型の場合は、液動検知部、信号増幅部、演算処理部、表示部、通信処理部などからなる。 表示部は、図11に示すように、グラフィックパネルを搭載し、液面の変化およびART(船)の傾斜状況などをCGにより、リアルタイムで表示する。 また、必要に応じてデーターロガー機能も備える。
尚、表示器は、費用対効果の点から選択すればよく束縛するものではない。
船体動揺と液動状況を監視することで、誤操作の防止が可能となり、その誤操作が生じる要因をいち早く把握することができるという、従来技術にない優れた作用効果を有しており、産業上の利用可能性は高い。
3a,3b・・・ウィングタンク、 4・・・空気ダクト
5・・・空気ダクト付き閉鎖装置(バルブ)、
6・・・周期可変用ダンパ(ダンパ)、 7・・・ダンパ開閉装置
8a,8b・・・液動センサー(レベルセンサー)
9a,9b・・・液体導入管、 10・・・液動監視装置
11・・・液動検知部、 12・・・情報処理部
13・・・信号増幅部(アンプ)、 14・・・A/D変換
15・・・演算解読・情報処理回回路、 16・・・警報回路
17・・・情報外部出力回路、 18・・・液動情報表示部
19・・・ART操作盤 20・・・開閉機器装置部
21・・・ARTコントロール部
22・・・ART制御情報表示部
23a,23b・・・ビルジハット(水溜箱)、 w・・・液体
Claims (4)
- 船体の両舷に設定した一対の少なくとも2つのウイングタンク(2a,3b)と、これらウイングタンクの底部に液体を左右方向へ移動させる液体通路(2)で連結すると共に、前記のウイングタンク上部に液体の制動を目的としたバルブ(5)等の手段を介して連通させる空気ダクト(4)と、液体通路内に減揺水槽の固有周期の可変を目的としたダンパ(6)等の手段を設け、更に、船の横揺角を検知し、その値を以て横揺れの単周期や平均横揺周期を演算し、更に制御信号等を出力するARTコントロール部(21)と、バルブやダンパを駆動させる開閉機器装置部(20)と、ART操作盤(19)とを具備した、液体(w)の移動または停止、或いは減揺水槽の固有周期可変操作を自動的に成し得る減揺水槽において、
前記ウイングタンク内の液動を検知する液動検知部(11)と、
前記液動検知部から出力される液動情報を解読する情報処理部(12)と、その情報を開示する表示器(18)と、必要に応じて警報を出す警報回路(16)と、その情報をARTコントロ−ル部などへ送信する情報外部出力回路(17)とを含む液動監視装置(10)と、を備えることを特徴とする液動監視装置付き船舶の動揺軽減装置。 - 液動検知部(11)は、液動センサー(8a)(8b)と、検知する液体の上下動を容易にするために略垂直に設けられた液体導入管(9a)(9b)とを含み、
前記液体導入管(9a)(9b)はその下端部を開放とし、当該下端部は前記ウイングタンクの底板より下方になるように施されたビルジハット(水溜箱)(23a)(23b)内に挿入され、前記液動センサー(8a)(8b)は前記液体導入管(9a)(9b)の頂部付近に設けられることを特徴とする請求項1記載の液動監視装置付き船舶の動揺軽減装置。 - 前記液動検知部を一対の前記ウイングタンクそれぞれに設け、それらを第1検知部と第2検知部とし、
前記第1検知部と前記第2検知部の測定周期間隔をTとしたとき、前記第1検知部の測定タイミングと前記第2検知部の測定タイミングは前記測定周期間隔の半分T/2だけずれていて、
前記情報処理部(12)は、前記第1検知部による測定値P1、P2、・・・の間に前記第2検知部による測定値S1,S2、・・・を挿入し、これら測定値S1,P1,S2,P2,・・・をサインカーブ波形に変換することにより前記液動情報を解読する、ことを特徴とする請求項1記載の液動監視装置付き船舶の動揺軽減装置。 - 少なくとも船体の定常傾斜を測定する動揺計を備え、
前記情報処理部(12)は、前記動揺計より得られたヒール角と前記液動検知部(11)の取り付け位置に基づき前記液動情報を補正することを特徴とする請求項1記載の液動監視装置付き船舶の動揺軽減装置。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005314215A JP2006219114A (ja) | 2005-01-11 | 2005-10-28 | 液動監視装置付き船舶の動揺軽減装置 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2005003270 | 2005-01-11 | ||
| JP2005314215A JP2006219114A (ja) | 2005-01-11 | 2005-10-28 | 液動監視装置付き船舶の動揺軽減装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| JP2006219114A true JP2006219114A (ja) | 2006-08-24 |
| JP2006219114A5 JP2006219114A5 (ja) | 2007-07-05 |
Family
ID=36981696
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2005314215A Pending JP2006219114A (ja) | 2005-01-11 | 2005-10-28 | 液動監視装置付き船舶の動揺軽減装置 |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2006219114A (ja) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006199163A (ja) * | 2005-01-21 | 2006-08-03 | Jfe Soldec Corp | 船舶の減揺水槽装置 |
| WO2011016730A1 (en) | 2009-08-06 | 2011-02-10 | Eirik Hellesvik | Roll dampening apparatus |
| JP2012526698A (ja) * | 2009-05-14 | 2012-11-01 | サイペム エス.アー. | 多量の液体の自由表面の動きを検出するための装置を備えた浮き支持体または船舶 |
| KR101312555B1 (ko) * | 2010-04-19 | 2013-09-30 | 티센크루프 마린 시스템즈 게엠베하 | 선박의 롤링 움직임 공명에 관하여 선박의 움직임 조건을 감지하기 위한 방법 |
-
2005
- 2005-10-28 JP JP2005314215A patent/JP2006219114A/ja active Pending
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2006199163A (ja) * | 2005-01-21 | 2006-08-03 | Jfe Soldec Corp | 船舶の減揺水槽装置 |
| JP2012526698A (ja) * | 2009-05-14 | 2012-11-01 | サイペム エス.アー. | 多量の液体の自由表面の動きを検出するための装置を備えた浮き支持体または船舶 |
| KR101523128B1 (ko) * | 2009-05-14 | 2015-05-26 | 사이뼁 소시에떼아노님 | 액체의 몸체 자유면의 이동을 탐지하기 위한 비콘들(beacons)을 구비한 부유 지지부 또는 선박 |
| WO2011016730A1 (en) | 2009-08-06 | 2011-02-10 | Eirik Hellesvik | Roll dampening apparatus |
| KR101312555B1 (ko) * | 2010-04-19 | 2013-09-30 | 티센크루프 마린 시스템즈 게엠베하 | 선박의 롤링 움직임 공명에 관하여 선박의 움직임 조건을 감지하기 위한 방법 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2078669B1 (en) | Method and system for assisting steering/mooring of vessel | |
| KR102419702B1 (ko) | 내비게이션 의사결정 지원 시스템과 통합된 선박의 선체의 구조적 모니터링 시스템 | |
| CN105292397B (zh) | 一种内河船舶稳性实时监测及预警方法、系统和装置 | |
| MX2014009932A (es) | Sistema de control con modulo de diferencial de presion que opera con sensores de deteccion de presion y de velocidad de aire. | |
| JP2006219114A (ja) | 液動監視装置付き船舶の動揺軽減装置 | |
| CN205862614U (zh) | 一种可使船舶安全通航的桥梁监测报警装置 | |
| CN102236327A (zh) | 一种船舶激光靠泊监测系统 | |
| CN108216496A (zh) | 船舶液舱的双重制荡装置及其制荡方法 | |
| CN105649461A (zh) | 船艇艏门的起放感知系统 | |
| NO20151389A1 (en) | Pressure balance type floating body and installation method thereof | |
| JP2005315717A (ja) | ガスメータ | |
| KR100894483B1 (ko) | 선박용 횡동요 저감장치의 성능시험 시스템 및 그 방법 | |
| KR20140059998A (ko) | 갱웨이의 상태정보를 고려한 동적 위치 유지 시스템 및 그의 위치 유지 방법 | |
| KR102078911B1 (ko) | Hils 기반 헬리데크 동요저감 장치 및 방법 | |
| Blanke et al. | Statistical change detection for diagnosis of buoyancy element defects on moored floating vessels | |
| KR102617983B1 (ko) | 증강현실을 이용한 자율운항선박의 제어 시스템 | |
| CN206130949U (zh) | 一种油船辅锅炉水位‑蒸汽自动控制系统 | |
| KR101312555B1 (ko) | 선박의 롤링 움직임 공명에 관하여 선박의 움직임 조건을 감지하기 위한 방법 | |
| KR20190081143A (ko) | 래싱 시스템 하중 계측 방법 | |
| JP2021160427A (ja) | 走錨リスク評価プログラム、走錨リスク評価システム、及び走錨リスク回避システム | |
| CN111289216B (zh) | 一种大雾天气桥区船舶安全通行能力的检验系统 | |
| CN117818830B (zh) | 船舶压载系统及控制方法 | |
| KR100748833B1 (ko) | 가스홀더의 피스톤 경사도 측정장치 | |
| KR102087171B1 (ko) | 동적 위치 제어 시스템 및 방법 | |
| KR100588340B1 (ko) | 선박엔진의 소음 감쇄장치 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070115 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20070115 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070115 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20070411 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20090623 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20090630 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090819 |
|
| A521 | Written amendment |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20090819 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20100112 |
|
| A02 | Decision of refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A02 Effective date: 20110524 |